STOEBER POLSKA. 1. Oprogramowanie POSITool
|
|
|
- Tadeusz Marszałek
- 8 lat temu
- Przeglądów:
Transkrypt


1 1. Oprogramowanie POSITool Oprogramowanie POSITool jest darmowym dodatkiem do kaŝdej przetwornicy. UmoŜliwia on wstępną konfigurację przetwornicy oraz parametryzację konkretnej aplikacji. Program oparty jest o standard PLCOpen, dzięki czemu proces programowania został oparty o system wizardow przeprowadzających krok po kroku przez wszystkie niezbędne parametry konfiguracji oraz aplikacji. Oprogramowanie pozwala pracować w trybie off-line jak i on-line. Tryb off-line pozwala na stworzenie nowej aplikacji i wstępne ustawienie parametrów. Następnie stworzony projekt poprzez złącze RS232 przesyłamy do przetwornicy. W trybie on-line mamy moŝliwość zmiany wszystkich parametrów przetwornicy takŝe w czasie ruchu, co pozwala nam od razu przeanalizować dokonane zmiany. Ten tryb umoŝliwia nam równieŝ skorzystania z funkcji oscyloskopu.

2 Oscyloskop umoŝliwia nam ściągnięcie charakterystyk czasowych róŝnych parametrów przetwornicy (moment silnika, prąd it.). Jest pomocnym narzędziem podczas uruchamiani aplikacji oraz podczas awarii lub niepoprawnego działania napędu. Pomocnym narzędziem w analizie problemów z przetwornicą jest pamięć błędów.

3 Przetwornica pamięta dokładnie dziesięć ostatnich błędów. Dzięki programowi POSITool jesteśmy wstanie określić, kiedy i co waŝniejsze, w jakich warunkach powstał dany błąd. Jednocześnie przetwornica zapamiętuje ilościowo, jakie błędy wystąpiły. Co równieŝ pozwoli nam określić czy błąd jest systematyczny czy teŝ przypadkowy. 2. Konfiguracja przetwornicy za pomocą programu POSITool. Do poprawnego skonfigurowania przetwornicy niezbędne jest przejście pierwszych siedmiu kroków: 2a. Po uruchomieniu programu przywita nas okno z wyborem trzech funkcji: Start new project with wizard rozpoczęcie nowego projektu Open project odczytanie projektu zapisanego w pliku Reverse documentation - sczytanie konfiguracji z przetwornicy i połączenie on-line. Po wybraniu opcji nowego projektu zostaniemy przeniesieni do kolejnego kroku.

4 2b. Opis projektu. Okno to pozwala nam zawarcie w pliku projektu opisu aplikacji, komentarza lub innych informacji, które mogą przydać się w późniejszym czasie lub osobom serwisującym napęd. Przyciskiem NEXT przechodzimy do kolejnego kroku.

5 2c. Wybór osi / zestawów parametrów. Przetwornica FDS5000 umoŝliwia skonfigurowania czterech zestawów parametrów. KaŜdy zestaw moŝe posiadać inny silnik jak i pracować z inną aplikacją. PoniewaŜ oprogramowanie POSITool obsługuje równieŝ serwoprzetwornice serii MDS5000 w tym kroku moŝliwy jest wybór ile osi poprzez urządzenie POSISwitch będzie sterować przetwornica. Jednak ta opcja jest dostępna tylko w przypadku serwonapędów z enkoderami absolutnymi.

6 2d. Wybór aplikacji. W tym oknie wybieramy rodzaj aplikacji, jaką będzie obsługiwała przetwornica. Command positioning pozycjonowanie komendowe aplikacja wykorzystywana przy komunikacji sieciowej. Występuje w formie endless ruchu nieskończonego, lub limited ruchu ograniczonego. Motion block positioning pozycjonowanie blokowe, podobnie jak komendowe występuje w formie ograniczonej i nieskończonej. UmoŜliwia zapisanie 256 bloków ruchu (pozycji, ruchu ciągłego, synchronizacji itp.). KaŜdy blok moŝe pracować z osobnym profilem jazdy. Speed regulacja prędkości Fast reference value szybka wartość zadana aplikacja umoŝliwa w szybki i prosty sposób skonfigurowanie przetwornicy do regulacji obrotów Comfort reference value rozbudowana opcja regulacji prędkości oraz momentu. Synchronous mode tryb synchroniczny napędów.
. KaŜdy blok moŝe pracować z osobnym profilem jazdy.")
7 2f. Wybór rodzaju sterowania. Standartowo przetwornicę moŝna sterować poprzez zestaw we/wy analogowych lub cyfrowych (control interface) lub za pomocą złącza szeregowego RS232 i protokołu USS. JeŜeli wyposaŝymy przetwornicę w moduł dodatkowy mamy moŝliwość wykorzystania innych dostępnych protokołów. W tym kroku wykonujemy wstępnego wyboru rodzaju sterowania

8 2g. Wybór silnika. Kolejny wizard umoŝliwia nam wybór silnika. Jak juŝ wcześniej wspominaliśmy oprogramowanie jest uniwersalne dla serii FDS5000 oraz MDS5000, mamy tu moŝliwość wyboru zarówno silników serwo jak i asynchronicznych. W tabelach podane są wszystkie silniki dostarczane przez firmę. Ułatwia nam to podłączenie silnika i dzięki temu nie musimy przeprowadzać procedury autotiuningu. JeŜeli silnik jest inny niŝ firmy STOEBER POLSKA naleŝy wybrać podobny a następnie później poprawić jego parametry i ewentualnie przeprowadzić autotiuning w celu stworzenia matematycznego modelu silnika.

9 2h. Konfiguracja przetwornicy. Okno to nam umoŝliwia skonfigurowanie odpowiedniej przetwornicy oraz ewentualne wyposaŝenia dodatkowego. Device family rodzaj przetwornicy FDS5000 lub MDS5000 Device type rozmiar przetwornicy wybór konkretnego modelu przetwornicy do silnika Firmaware poniewaŝ moŝliwa jest wymiana firmware przetwornicy (np. dodanie nowych aplikacji, poprawa błędów itp.) naleŝy wybrać odpowiedni firmware, wcześniej sprawdzony na obudowie przetwornicy. Opcja ta równieŝ umoŝliwia wgranie nowego programu do starszych przetwornic. Option module 1 (upper) karta rozszerzeń, moduł komunikacyjny lub karta we/wy Brake resistor odpowiedni rezystor hamowania, wybór z pośród rezystorów dostarczanych przez. Po wciśnięciu klawisza FINISH zostaniemy przeniesieni do wizardów odpowiedzialnych za poszczególne aplikacje. Zawartość tych wizardów zostanie opisana w dalszej części.

10 2i. Konfiguracja podstawowa parametrów aplikacji. NiezaleŜnie od wybranej aplikacji pierwszy wizard nie róŝni się dla wszystkich. Ustawia się w nim wszystkie podstawowe parametry dla poprawnego działania przetwornicy, ustawia się dodatkowe elementy wyposaŝenia (np. enkodery) i rodzaj sterowania. Po lewej stronie widoczne jest drzewo dostępnych opcji oraz osi (zestawów parametrów). MoŜna równieŝ uruchomić pamięć błędów oraz oscyloskop. Wizard GENERAL OPTIONS zawiera wszystkie podstawowe parametry dotyczące sterowania silnika, ustawień przetwornicy, funkcji zabezpieczeń, podłączonego enkodera oraz symulacji enkodera oraz funkcji dodatkowych.

11 2j. Regulator Pierwsze okno odpowiada za ustawienia regulatora PID. Parametr B20 odpowiada za rodzaj regulatora. W przypadku sterowania U/f oraz wektorowego bez sprzęŝenia zwrotnego mamy moŝliwość ustawienia charakterystyki sterowania

12 (B21) oraz filtru dolno przepustowego C33 wartości zadanej. W przypadku pełnej regulacji wektorowej ze sprzęŝeniem zwrotnym, mamy dostęp do pełnego regulatora PID. W praktyce, najczęściej wykorzystywanymi parametrami są: C31 człon proporcjonalny regulatora oraz C32 człon całkujący. Parametrami tymi moŝemy ustalić sztywność wału oraz precyzję dochodzenia do wartości zadanej. 2k. Przetwornica. Kolejne okno przedstawia nam parametry dotyczące przetwornicy: A34 blokada rozruchu po zaniku napięcia A35 dolny poziom napięcia zasilającego, przy którym przetwornica zgłosi błąd i nie będzie moŝliwe uruchomienie napędu. A36 znamionowe napięcie zasilania A29 czy przy błędzie ma być załączone szybkie zatrzymanie czy teŝ silnik ma hamować wybiegiem A44 podobnie do A29 tylko dotyczy wyłączenia sygnału ENABLE A39 czas zadziałania szybkiego zatrzymania A45 jak ma się zachować przetwornica po nastąpieniu funkcji szybkiego zatrzymania.

13 2l. Rezystor hamowania. W oknie tym moŝemy ustawić dane rezystora hamowania. JeŜeli nie został wybrany podczas procesu konfiguracji rezystor dostarczany przez firmę STOEBER naleŝy go wprowadzić ręcznie. JeŜeli taki rezystor nie występuje w układzie wystarczy w parametrze A22 wstawić wartość 0.

14 2m. Wartości maksymalne. Parametrami dostępnymi w tym oknie moŝemy ustawić maksymalne wartości prędkości obrotowej oraz maksymalny moment. Ograniczenie momentu moŝna ustawić proporcjonalnie lub nieproporcjonalnie dla obu kierunków obrotu.

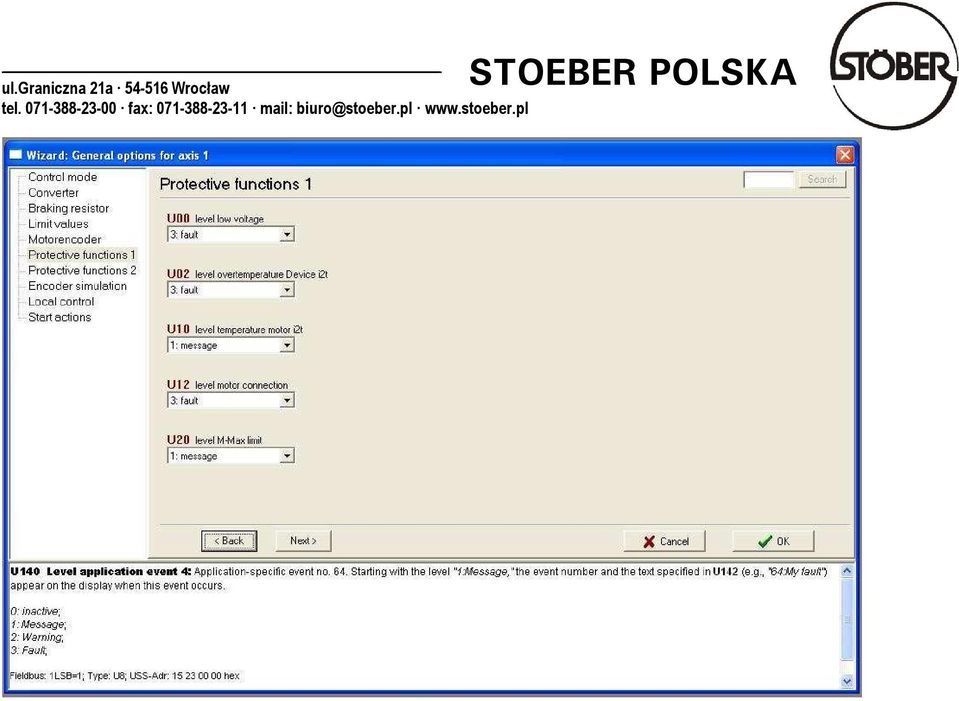
15 2n. Ustawienie enkodera. Parametr B26 mówi nam, na które złącze jest do urządzenia podpięty enkoder oraz jeŝeli jest to, na które wejścia. Kolejne parametry opisują rodzaj enkodera oraz ilość impulsów na obrót enkodera 2o. Funkcje zabezpieczeń. Kolejne dwa okna odpowiadają za funkcje zabezpieczeń przetwornicy. Zestaw dostępnych parametrów moŝe się róŝnić w zaleŝności od aplikacji, jaką przetwornica obsługuje. KaŜdy z błędów ma moŝliwość ustawienia trzech funkcji: Message informacja o wystąpieniu zakłócenia, nie ma ona wpływu na wyłączenie przetwornicy, na wyświetlaczu pojawia się odpowiednia informacja oraz ustawiane są odpowiednie bity kontrolne Warning ostrzeŝenie, w czasie wystąpienia danego błędy przetwornica zgłasza ostrzeŝenie, w parametrze tym ustawiamy czas wyświetlania informacji o błędzie, do momentu upływu danego czasu przetwornica wyświetla odpowiednią informację. JeŜeli w tym czasie problem nie zniknie przetwornica wyłączy się zgłaszając błąd. Fault błąd wystąpienie tego typu błędu powoduje natychmiastowe zatrzymanie przetwornicy.

16
17 2p. Symulacja enkodera. JeŜeli aplikacja wymaga wyprowadzenia impulsów enkodera do zewnętrznego sterownika lub licznika wykonujemy to za pomacą symulacji enkodera. W przypadku przetwornicy FDS5000 jest to moŝliwe jedynie poprzez wyjścia binarne. NaleŜy pamiętać, Ŝe w momencie wykorzystania tej funkcji zajmujemy oba wyjścia standartowo dostępne w przetwornicy. 2r. Sterowanie ręczne. Klawiatura zamontowane na panelu przednim przetwornicy umoŝliwia nam zmianę parametrów oraz jazdę ręczną napędu. W kolejnym oknie ustawiamy parametry jazdy: prędkość oraz przyspieszenie. MoŜemy równieŝ wyłączyć moŝliwość jazdy z wykorzystaniem klawiatury. W przypadku aplikacji pozycjonowania. MoŜliwe jest jedynie włączenie lub wyłączenie tej funkcji. Ustawienie prędkości oraz przyśpieszenia ustawiane są w innych parametrach.

18 2s. Funkcje dodatkowe. Ostatnie okno z grupy parametrów główny zawiera szereg funkcji dodatkowych.. Dla silników asynchronicznych najwaŝniejsze to:

19 A00 zapis zmienionych parametrów do pamięci przetwornicy (do paramodułu) B41 autotuning przetwornica poprzez pomiary elektryczne stworzy matematyczny model silnika, funkcja dotyczy silników innych niŝ od firmy STOEBER. B42 optymalizacja regulatora, przetwornica automatycznie dobierze ustawy regulatora do aplikacji, napęd podczas tego procesu moŝe poruszać się.

20 3a. Pozycjonowanie. Aplikacje pozycjonowania mogą być wykonane na dwa sposoby. Pozycjonowanie komendowe jest przeznaczone przede wszystkim do sterowania poprzez sieć przemysłową. JeŜeli skorzystamy z pozycjonowania blokowego wiele funkcji aplikacji moŝemy stworzyć w samej przetwornicy (np. sekwencja ruchu). Wspólnym wizardem dla obu rodzajów pozycjonowania jest zakładka POSI MACHINE. Za pomocą kilku kroków ustalimy skąd będą pochodzić informacje o pozycjonowaniu, skalowaniu, bazowaniu oraz ewentualnych limitach krańcowych pozycji. 3b. Enkoder pozycjonujący. Przetwornica ma moŝliwość pozycjonowania na dwa sposoby. Pierwszą metodą jest pozycjonowanie za pomocą enkodera zamontowanego na wale silnika. Jest to najczęściej występujący sposób i ogranicza się on jedynie do późniejszego wyskalowania napędu. Ta opcja wymaga ustawienia parametru I02 na wartość 0: motor-encoder. W przypadku, gdy w aplikacji występuje moŝliwość poślizgów lub innych czynników mogących zakłócać proces pozycjonowania moŝna zastosować zewnętrzny enkoder pozycjonujący. Zakładka ta połączona jest z kolejną opisującą miejsce, w którym enkoder jest zamocowany (w odniesieniu do wału silnika).

21 W parametrze I26 wpisujemy wartość przełoŝenie, jakie występuje w aplikacji w odniesie do silnika. Program równieŝ przeliczy nam ile impulsów enkodera zewnętrznego będzie odpowiadać jednemu obrotowi wału silnika.
22 3c. Skalowanie Przetwornice serii 5000 (FDS/MDS) posiadają tę przewagę nad konkurencją, Ŝe pozycjonowanie odbywa się w jednostkach rzeczywistych. Dzięki zakładce skalowania jesteśmy wstanie określić dokładne przełoŝenie przekładni, jakie występuje w układzie. Określamy dokładność, z jaką wyświetlana będzie pozycja (I06) oraz jednostkę miary (I09). Bardzo waŝnymi parametrami dla skalowania są I07 oraz I08. Opisują one, jaką ilość obrotów silnika przypada na jeden obrót wału wyjściowego za przekładnią. W przypadku ruchu liniowego musimy uwzględnić jeszcze drogę, jaką napęd przebędzie przy 1 obrocie wału wyjściowego. Firma STOEBER w katalogach przekładni i motoreduktorów podaje dokładne, ułamkowe wartości przełoŝeń, które umoŝliwią dokładne pozycjonowanie, łącznie Z uwzględnieniem błędów zaokrągleń przełoŝenia. Dokładny opis jak to wykonać znajduje się w dokumentacji dotyczącej pozycjonowania komendowego.
23 3d. Dane maszyny. Po prawidłowym wyskalowaniu napędu przechodzimy do określenia parametrów pracy maszyny. Wszystkie zmienne podajemy w jednostkach wyskalowania, takŝe, jeŝeli mamy ruch liniowy i pomiar wykonujemy w mm to prędkość obrotową (I10) podajemy w mm/s. Podobnie z przyśpieszeniem (I11), rampą szybkiego zatrzymania (I17) oraz prędkością, przyśpieszeniem i pojedynczym krokiem jazdy ręcznej (odpowiedni I12, I13, I14). Jednocześnie program przelicza wszystkie te wartości na parametry, jakie wystąpią na wale silnika. JeŜeli przekroczymy wartości określone w parametrach głównych, program poinformuje nas o tym podświetlając odpowiednia daną na czerwono. Istotnymi parametrami z tej grupy są równieŝ I21 maksymalny błąd uchybu między wartością zadaną oraz rzeczywistą oraz I22 okno pozycjonowania. Parametr I24 pozwala skompensować luz przekładni lub innych elementów występujących w aplikacji, ma to szczególne znaczenie przy pracy zwrotnej. 3e. Bazowanie Kolejnym krokiem jest bazowanie napędu. Ma to duŝe znaczenie, jeŝeli będziemy pracowali na wartościach absolutnych pozycji oraz gdy planujemy korzystanie z krańcówek programowych. Mamy do wyboru trzy moŝliwości bazowania: na czujnik bazujący, ślad zerowy enkodera, definiowanie domu. Dwie pierwsze moŝliwości wymagają podanie prędkości wolnej oraz szybkiej bazowanie, rampy oraz wartości pozycji domu (najczęściej 0 ). Bazowanie na dom polega na ustawieniu bazy (zera) w miejscu, w którym napęd konkretnie stoi. Ten rodzaj
24 bazowanie wymaga jedynie podania wartości pozycji domu. 3f. Krańcówki programowe. JeŜeli napęd jest zbazowany a praca jest na drodze zamkniętej obok krańcówek fizycznych moŝemy zastosować krańcówki programowe.
25 Ustawienie tych krańcówek w odległości niewielkiej przed krańcówkami fizycznymi zapewni nam dodatkowe zabezpieczenie przed wjazdem w obszar zabroniony nawet w przypadku uszkodzenia czujników fizycznych. W odróŝnieniu od fizycznej krańcówki napęd przed krańcówka wyhamuje z obowiązującą rampą i będzie moŝliwy ruch w odwrotnym kierunku. Przy krańcówce fizycznej przetwornica zgłosi błąd i zatrzyma napęd. WyŜej wymienione funkcje są wspólne dla aplikacji pozycjonowania i dla ich odmian: synchronizacja, symulacja silnika krokowego itp..
26 4. Pozycjonowanie blokowe. Aplikacja umoŝliwia nam tworzenie kompletnych programów pozycjonowania. Podstawą są bloki ruchu, w których zawarte są komendy pozycjonowania, pozycja oraz moŝliwość przechodzenia pomiędzy poszczególnymi blokami. KaŜdy blok ruchu moŝe być wykonany z wykorzystaniem własne profilu jazdy. Aplikacja pozwala nam na stworzenie 256 profili ruchu oraz jazdy. 4a. Blok ruchu. Blok ruchu składa się z kilku elementów: J10.xxx nazwa bloku J11.xxx pozycja docelowa funkcja jest aktywna, jeŝeli zostanie wybrana komenda odpowiedzialna za ruch J12.xxx komenda ruchu według standardu PLCOpen J13.xxx numer profilu jazdy przypisanego do bloku J14.xxx metoda przejścia do kolejnego bloku J15.xxx kolejny blok, który zostanie wykonany po spełnieniu warunku w J14.xxx J16.xxx czas opóźnienia, jeŝeli warunkiem przejścia jest przerwa.
27 4b. Profil ruchu. KaŜdemu profilowi ruchu moŝna przypisać własny profil jazdy. Jednocześnie profil jazdy moŝe obsługiwać kilka profilom jazdy. J20.xxx nazwa profilu J21.xxx prędkość jazdy J22.xxx rampa przyśpieszenia J23.xxx rampa hamowania J25.xxx wygładzanie rampy J27.xxx czy po wykonaniu ruchu ma być załoŝony hamulec J28.xxx aktywacja regulacji prędkości obrotowej KaŜdy profil jazdy moŝe mieć równieŝ określone punkty przełączające. W kolejnej zakładce moŝemy ustawić, w jakich momentach te punkty będą się uaktywniać, metodę przełączania oraz bity, które mają się uaktywnić w przypadku konkretnego punktu.
28
29 4c. Funkcje dodatkowe. Podobnie do pozycjonowania komendowego moŝemy skorzystać z krzywki elektronicznej. Jednak w przypadku tej aplikacji moŝemy skorzystać z trzech krzywek elektronicznych. Parametrach I60 do I65 definiujemy początki i końce krzywek.
30 4d. Komparator Jednym z warunków przełączania pomiędzy blokami ruchu moŝe być komparator. Wybrany parametr porównujemy z wartością bazową. JeŜeli rzeczywista wartość przekroczy parametr bazowy komparator zadziała i w odpowiednim miejscu ustawi nam stan wysoki (bit w parametrze C48). MoŜemy to wykorzystać do przejścia pomiędzy blokami. Komparator przydaje się w aplikacjach pracujący na tak zwany zderzak.
31 4e. Wejścia binarne. W omawianej aplikacji posiadamy trzy zakładki odpowiadające za wejścia binarne. Dwie pierwsze są identyczne jak w pozycjonowaniu komendowym. Trzecia zakładka jest dostępna jedynie w pozycjonowaniu blokowym. Mamy tutaj dostęp do wejść, którymi moŝemy sterować zatrzaskiem elektronicznym. Parametry I112 oraz I113 odpowiadają za jeden z warunków przejścia pomiędzy blokami. Parametry I115, 116, 117 wykorzystywane są do startowania konkretnych bloków (parametryzacja tych wejść, czyli przypisanie odpowiednich bloków odbywa się w parametrach J01,02,03). Funkcja Teach-in (I114) jest wykorzystywana do uczenia napędu pozycji. Mamy moŝliwość wybrania poprzez selektory odpowiedniego bloku, następnie ustawienia napędy na konkretnej pozycji (np. jazdą ręczną). JeŜeli podamy sygnał tech-in napęd zapamięta w odpowiednim bloku daną pozycję. W ten sposób moŝemy nauczyć cały program, po jakich pozycjach mamy się poruszać. Do wyboru konkretnego bloku wykorzystuje się selektory. Mogą one być przypisane konkretnym wejściom binarnym lub wybierane poprzez sieć przemysłową.
32 Parametry od I118 do I125 odpowiadają za binarne przedstawienie wartości bloku pozycjonującego. Ja wyŝej wspominaliśmy parametry J dostępne w tej zakładce odpowiadają za wybór bloku i tak: J01 I115, J02 I116, J03 I116. Parametr J00 odpowiada konkretnemu blokowi, który zostanie wykonany, jeŝeli na selektorach nie będzie wybrany Ŝaden blok a zostanie wydany sygnał execute. 4f. Wejścia analogowe, wyjścia binarne, wyjścia analogowe Wyjścia i wejścia wymienione w podtytule działają tak samo w jak w aplikacji pozycjonowania komendowego takŝe nie wymagają w tym miejscu szczególnej uwagi.
33 4g. Słowo kontrolne oraz statutowe Są to dwie zakładki pozwalające kontrolować nam stan przetwornicy. Słowo kontrolne podobnie jak aplikacji pozycjonowania pozwala nam sterowanie przetwornicy bez podłączonej sieci komunikacyjnej lub sterownika PLC.
34 Słowo statusowe opisuje na stan przetwornicy oraz w jakiej fazie ruchu znajduje się napęd. Wszystkie te bloki moŝna odczytać wykorzystując komunikację sieciową. 5. Zakończenie. PowyŜej przedstawione przykłady stanowią podstawowe moŝliwości przetwornicy. Szczegółowe opisy funkcji i parametrów znajdą Państwo w instrukcjach do konkretnych aplikacji. Celem tego opisu jest przedstawienie krok po kroku parametryzowania przetwornicy w celu ułatwienia programowania. Wykorzystując podstawowe funkcje pozycjonowania komendowego lub blokowego moŝna wykonać wiele innych aplikacji np.: synchronizacja, symulacja silnika krokowego. Regulacja prędkości moŝe być wykonana równieŝ w aplikacji komfortowej wartości zadanej dającej duŝe moŝliwości regulacji obrotów lub momentu (regulacja prędkościowa lub momentowa itp.). Pracownicy firmy udzielą pomocy w przypadku problemów z uruchomieniem, parametryzacją lub diagnostyką przetwornic. SłuŜymy równieŝ pomocą w doborze kompletnych systemów napędowych opartych zarówno na układach z klasyczną przekładnia i silnikiem asynchroniczny lub serwosilników z przekładniami planetarnymi. ADRES: Ul. Graniczna 21a Wrocław Tel Fax biuro@stoeber.pl
STOEBER POLSKA. 1. Oprogramowanie POSITool
 1. Oprogramowanie POSITool Oprogramowanie POSITool jest darmowym dodatkiem do kaŝdej przetwornicy. UmoŜliwia on wstępną konfigurację przetwornicy oraz parametryzację konkretnej aplikacji. Program oparty
1. Oprogramowanie POSITool Oprogramowanie POSITool jest darmowym dodatkiem do kaŝdej przetwornicy. UmoŜliwia on wstępną konfigurację przetwornicy oraz parametryzację konkretnej aplikacji. Program oparty
SZKOLENIE Z ZAKRESU BUDOWY I URUCHOMIENIA SERWOPRZETWORNIC SERII MD5000
 SZKOLENIE Z ZAKRESU BUDOWY I URUCHOMIENIA SERWOPRZETWORNIC SERII MD5000 Autor: Bartłomiej Kuczyński STOEBER POLSKA Wrocław 2009 SPIS TREŚCI: 1. Serwoprzetwornica częstotliwości POSIDRIVE MDS5000. 3 2.
SZKOLENIE Z ZAKRESU BUDOWY I URUCHOMIENIA SERWOPRZETWORNIC SERII MD5000 Autor: Bartłomiej Kuczyński STOEBER POLSKA Wrocław 2009 SPIS TREŚCI: 1. Serwoprzetwornica częstotliwości POSIDRIVE MDS5000. 3 2.
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000
 APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 1. Wstęp...3 2. Pierwsze uruchomienie....3 3. Wybór aplikacji i komunikacji...4 4. Sterowanie...6
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 1. Wstęp...3 2. Pierwsze uruchomienie....3 3. Wybór aplikacji i komunikacji...4 4. Sterowanie...6
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000
 APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 Autor: Ver: Marcin Ataman 1.0 Spis treści strona 1. Wstęp... 2 2. Pierwsze uruchomienie....
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 Autor: Ver: Marcin Ataman 1.0 Spis treści strona 1. Wstęp... 2 2. Pierwsze uruchomienie....
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Falowniki Wektorowe Rexroth Fv Parametryzacja
 Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Kurs SINAMICS G120 Konfiguracja i uruchomienie. Spis treści. Dzień 1
 Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Wyjście Kierunek. P zasilanie zewnętrzne 12/24VDC. P040 wyjście impulsów kanał 0. COM0 0V P041 wyjście impulsów kanał 1. COM1 0V P042 kierunek kanał 0
 Moduł pozycjonowania 1. Podłączenie Moduł pozycjonowania zapewnia sterowanie impulsowe napędem. Sterownik Master K 120S posiada wbudowany moduł pozycjonowania umoŝliwiający sterowanie dwoma napędami jednocześnie.
Moduł pozycjonowania 1. Podłączenie Moduł pozycjonowania zapewnia sterowanie impulsowe napędem. Sterownik Master K 120S posiada wbudowany moduł pozycjonowania umoŝliwiający sterowanie dwoma napędami jednocześnie.
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Serwonapędy AC Serie EDC, EDB, ProNet
 Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Kontroler CSMIO/IP-A oraz Mach4
 Kontroler CSMIO/IP-A oraz Mach4 Quick start strojenie osi 1) Konfiguracje rozpoczynamy od przydzielenia osi Motoru. Jak widać na zdjęciu osi X został przydzielony Motor0 (poradnik omawia konfiguracje osi
Kontroler CSMIO/IP-A oraz Mach4 Quick start strojenie osi 1) Konfiguracje rozpoczynamy od przydzielenia osi Motoru. Jak widać na zdjęciu osi X został przydzielony Motor0 (poradnik omawia konfiguracje osi
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
3.0 FALOWNIKI ASTRAADA DRV
 ASTOR KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI - ASTRAADA DRV 3.0 FALOWNIKI ASTRAADA DRV INFORMACJE OGÓLNE O FALOWNIKACH ASTRAADA DRV 3.1 FALOWNIKI ASTRAADA DRV 3.2 2015-06-05 3.2-1 KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI
ASTOR KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI - ASTRAADA DRV 3.0 FALOWNIKI ASTRAADA DRV INFORMACJE OGÓLNE O FALOWNIKACH ASTRAADA DRV 3.1 FALOWNIKI ASTRAADA DRV 3.2 2015-06-05 3.2-1 KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI
Falownik MOTOVARIO EM16. Skrócona instrukcja obsługi
 Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
A LIO COMBIVIS. Program KEB dla falowników F4 i F5 proste podłączenie, programowanie i obsługa
 Program KEB dla falowników F4 i F5 proste podłączenie, programowanie i obsługa Analiza oscyloskop: 4-o kanałowy oscyloskop do graficznej kontroli i optymalizacji napędu. PC-Software: Uniwersalne i efektywne
Program KEB dla falowników F4 i F5 proste podłączenie, programowanie i obsługa Analiza oscyloskop: 4-o kanałowy oscyloskop do graficznej kontroli i optymalizacji napędu. PC-Software: Uniwersalne i efektywne
Instrukcja użytkownika ARSoft-WZ1
 05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
I. DANE TECHNICZNE II. INSTRUKCJA UśYTKOWANIA... 4
 Sterownik CU-210 I. DANE TECHNICZNE... 2 1 Opis elementów sterujących i kontrolnych...2 2 Budowa... 3 3 Dane znamionowe... 3 II. INSTRUKCJA UśYTKOWANIA... 4 1 Opis działania... 4 1.1 Załączenie i wyłączenie
Sterownik CU-210 I. DANE TECHNICZNE... 2 1 Opis elementów sterujących i kontrolnych...2 2 Budowa... 3 3 Dane znamionowe... 3 II. INSTRUKCJA UśYTKOWANIA... 4 1 Opis działania... 4 1.1 Załączenie i wyłączenie
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU
 Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
Oprogramowanie testowe CSMIO/IP v3.000 dla programu Mach4.
 Oprogramowanie testowe CSMIO/IP v3.000 dla programu Mach4. Wymagania i uwagi ogólne Z uwagi na to, że oprogramowanie CSMIOv3 jest fazie testów, powinno być używane jedynie przez osoby, które są dobrze
Oprogramowanie testowe CSMIO/IP v3.000 dla programu Mach4. Wymagania i uwagi ogólne Z uwagi na to, że oprogramowanie CSMIOv3 jest fazie testów, powinno być używane jedynie przez osoby, które są dobrze
DOKUMENTACJA TECHNICZNO-RUCHOWA. Sterownik mikroklimatu FAG25-III
 DOKUMENTACJA TECHNICZNO-RUCHOWA Sterownik mikroklimatu FAG25-III 1 Spis treści 1. Opis głównych opcji... 2 2. Tryb konfiguracji A... 3 3. Tryb konfiguracji B... 5 4. Dane techniczne... 6 1. Opis głównych
DOKUMENTACJA TECHNICZNO-RUCHOWA Sterownik mikroklimatu FAG25-III 1 Spis treści 1. Opis głównych opcji... 2 2. Tryb konfiguracji A... 3 3. Tryb konfiguracji B... 5 4. Dane techniczne... 6 1. Opis głównych
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
MIKROPROCESOROWY REGULATOR TEMPERATURY KOTŁA C.O. + C.W.U.
 MIKROPROCESOROWY REGULATOR TEMPERATURY KOTŁA C.O. + C.W.U. INSTRUKCJA OBSŁUGI 2 1. Opis panelu przedniego 3 1 2 7 4 5 6 Widok regulatora wraz z zaznaczonymi funkcjami Opis stanu pracy Nadmuch Pompa C.O.
MIKROPROCESOROWY REGULATOR TEMPERATURY KOTŁA C.O. + C.W.U. INSTRUKCJA OBSŁUGI 2 1. Opis panelu przedniego 3 1 2 7 4 5 6 Widok regulatora wraz z zaznaczonymi funkcjami Opis stanu pracy Nadmuch Pompa C.O.
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej
 Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
Safety Integrated dla napędów. Funkcje bezpieczeństwa zintegrowane w napędach Sinamics S120
 Safety Integrated dla napędów bezpieczeństwa zintegrowane w napędach Sinamics S120 Safety Integrated dla napędów : Przegląd bezpieczeństwa dla napędów zgodne z IEC 61800-5-2 Sterowanie przez zaciski EP
Safety Integrated dla napędów bezpieczeństwa zintegrowane w napędach Sinamics S120 Safety Integrated dla napędów : Przegląd bezpieczeństwa dla napędów zgodne z IEC 61800-5-2 Sterowanie przez zaciski EP
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Stanowisko pomiarowe do badania stanów przejściowych silnika krokowego
 Stanowisko pomiarowe do badania stanów przejściowych silnika krokowego 1. Specyfikacja...3 1.1. Przeznaczenie stanowiska...3 1.2. Parametry stanowiska...3 2. Elementy składowe...4 3. Obsługa...6 3.1. Uruchomienie...6
Stanowisko pomiarowe do badania stanów przejściowych silnika krokowego 1. Specyfikacja...3 1.1. Przeznaczenie stanowiska...3 1.2. Parametry stanowiska...3 2. Elementy składowe...4 3. Obsługa...6 3.1. Uruchomienie...6
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Instrukcja programowania IRSC OPEN
 Instrukcja programowania IRSC OPEN Zennio IRSC OPEN (ZN1CL-IRSC) I. UWAGI WSTĘPNE Urządzenie IRSC OPEN umoŝliwia wykorzystanie w systemie KNX komend róŝnych pilotów zdalnego sterowania do obsługi urządzeń
Instrukcja programowania IRSC OPEN Zennio IRSC OPEN (ZN1CL-IRSC) I. UWAGI WSTĘPNE Urządzenie IRSC OPEN umoŝliwia wykorzystanie w systemie KNX komend róŝnych pilotów zdalnego sterowania do obsługi urządzeń
Multimetr cyfrowy MAS-345. Instrukcja instalacji i obsługi oprogramowania DMM VIEW Ver 2.0
 Multimetr cyfrowy MAS-345 Instrukcja instalacji i obsługi oprogramowania DMM VIEW Ver 2.0 Do urządzenia MAS-345 została dołączona płyta CD zawierająca oprogramowanie DMM VIEW 2.0, dzięki któremu moŝliwa
Multimetr cyfrowy MAS-345 Instrukcja instalacji i obsługi oprogramowania DMM VIEW Ver 2.0 Do urządzenia MAS-345 została dołączona płyta CD zawierająca oprogramowanie DMM VIEW 2.0, dzięki któremu moŝliwa
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Przemienniki częstotliwości serii SY 8000 i SY 6600
 Przemienniki częstotliwości serii SY 8000 i SY 6600 Ogólna specyfikacja SY Sanyu Electronics Equipment Co. Ltd oferuje przemienniki do zastosowań w różnych dziedzinach przemysłu. Ogólna specyfikacja SY
Przemienniki częstotliwości serii SY 8000 i SY 6600 Ogólna specyfikacja SY Sanyu Electronics Equipment Co. Ltd oferuje przemienniki do zastosowań w różnych dziedzinach przemysłu. Ogólna specyfikacja SY
6.4 WZMACNIACZE ASTOR GE INTELLIGENT PLATFORMS - SERWONAPĘDY VERSAMOTION
 6.4 WZMACNIACZE Wzmacniacz naleŝy dobrać tak, aby był kompatybilny pod względem mocy, ze sterowanym przez niego silnikiem. Numery katalogowe wzmacniaczy Nr katalogowy Moc Zasilanie IC800VMA012 100 W 1-fazowe
6.4 WZMACNIACZE Wzmacniacz naleŝy dobrać tak, aby był kompatybilny pod względem mocy, ze sterowanym przez niego silnikiem. Numery katalogowe wzmacniaczy Nr katalogowy Moc Zasilanie IC800VMA012 100 W 1-fazowe
Opis panelu przedniego
 Opis panelu przedniego 1. Klawisz wejścia do MENU sterownika oraz zatwierdzania ustawień 2. Klawisz wyjścia, cofnięcia do opcji wcześniejszej oraz start/stop pracy pieca 3. Klawisz + (wielofunkcyjny) Naciśnięcie
Opis panelu przedniego 1. Klawisz wejścia do MENU sterownika oraz zatwierdzania ustawień 2. Klawisz wyjścia, cofnięcia do opcji wcześniejszej oraz start/stop pracy pieca 3. Klawisz + (wielofunkcyjny) Naciśnięcie
1 Moduł Neuronu Cyfrowego SM
 1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1. Aplikacja LOGO! App do LOGO! 8 i LOGO! 7
 1. Aplikacja do LOGO! 8 i LOGO! 7 1.1. Przegląd funkcji Darmowa aplikacja umożliwia podgląd wartości parametrów procesowych modułu podstawowego LOGO! 8 i LOGO! 7 za pomocą smartfona lub tabletu przez sieć
1. Aplikacja do LOGO! 8 i LOGO! 7 1.1. Przegląd funkcji Darmowa aplikacja umożliwia podgląd wartości parametrów procesowych modułu podstawowego LOGO! 8 i LOGO! 7 za pomocą smartfona lub tabletu przez sieć
Instrukcja Obsługi. Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH
 Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026"
 Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026" Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763-77-77 Fax: 032 763-75-94 v.1.2 www.mikster.pl mikster@mikster.pl (14.11.2007) SPIS
Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026" Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763-77-77 Fax: 032 763-75-94 v.1.2 www.mikster.pl mikster@mikster.pl (14.11.2007) SPIS
Sterowanie serwonapędem ASTRAADA SRV za pomocą zewnętrznego enkodera, praca w trybie FOLLOWER. Czerwiec 2016
 Sterowanie serwonapędem ASTRAADA SRV za pomocą zewnętrznego enkodera, praca w trybie FOLLOWER Czerwiec 2016 Spis treści Bezpieczeństwo pracy z serwonapędem... 3 Przygotowanie serwonapędu ASTRAADA SRV...
Sterowanie serwonapędem ASTRAADA SRV za pomocą zewnętrznego enkodera, praca w trybie FOLLOWER Czerwiec 2016 Spis treści Bezpieczeństwo pracy z serwonapędem... 3 Przygotowanie serwonapędu ASTRAADA SRV...
Instrukcja obsługi. Oprogramowanie narzędziowe do konfiguracji przemienników częstotliwości Astraada Drive. Oprogramowanie narzędziowe HCM
 Oprogramowanie narzędziowe HCM Oprogramowanie narzędziowe do konfiguracji przemienników częstotliwości Astraada Drive Instrukcja obsługi Wersja programu 2.1 beta PL Spis treści 1. Wstęp... 4 2. Składniki
Oprogramowanie narzędziowe HCM Oprogramowanie narzędziowe do konfiguracji przemienników częstotliwości Astraada Drive Instrukcja obsługi Wersja programu 2.1 beta PL Spis treści 1. Wstęp... 4 2. Składniki
FAQ: 00000013/PL Data: 16/11/2007 Programowanie przez Internet: Konfiguracja modułów SCALANCE S 612 V2 do komunikacji z komputerem przez VPN
 Za pomocą dwóch modułów SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) chcemy umoŝliwić dostęp do sterownika podłączonego do zabezpieczonej sieci wewnętrznej. Komputer, z którego chcemy mieć
Za pomocą dwóch modułów SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) chcemy umoŝliwić dostęp do sterownika podłączonego do zabezpieczonej sieci wewnętrznej. Komputer, z którego chcemy mieć
ASQ systemy sterowania zestawami pomp
 systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Licznik rewersyjny MD100 rev. 2.48
 Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/ T
 Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/104-110T IE3 Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/104-110T IE3 Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika
1. Instalacja modułu w systemie Windows.
 1. Instalacja modułu w systemie Windows. W urządzeniach dołączanych do sieci lokalnej LAN zastosowano moduły firmy DIGI. Sterowniki dostarczone przez producenta tworzą w systemie Windows wirtualny port
1. Instalacja modułu w systemie Windows. W urządzeniach dołączanych do sieci lokalnej LAN zastosowano moduły firmy DIGI. Sterowniki dostarczone przez producenta tworzą w systemie Windows wirtualny port
1 Moduł Lutron HomeWorks QS
 1 Moduł Lutron HomeWorks QS Moduł Lutron HomeWorks QS daje użytkownikowi Systemu możliwość współpracy oprogramowania z urządzeniami firmy Lutron serii HomeWorks QS. System Vision może używać go do odbierania
1 Moduł Lutron HomeWorks QS Moduł Lutron HomeWorks QS daje użytkownikowi Systemu możliwość współpracy oprogramowania z urządzeniami firmy Lutron serii HomeWorks QS. System Vision może używać go do odbierania
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania. Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne. Ćwiczenie 11 Silnik
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 11 Silnik Poznań 2017 OGÓLNE ZASADY BEZPIECZEŃSTWA PODCZAS WYKONYWANIA ĆWICZEŃ
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 11 Silnik Poznań 2017 OGÓLNE ZASADY BEZPIECZEŃSTWA PODCZAS WYKONYWANIA ĆWICZEŃ
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T
 Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
Elastyczne systemy wytwarzania
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet.
 Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia
 Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Dell UltraSharp UP3017 Dell Display Manager Instrukcja użytkownika
 Dell UltraSharp UP3017 Dell Display Manager Instrukcja użytkownika Model: UP3017 Model - zgodność z przepisami: UP3017t UWAGA: UWAGA oznacza ważną informację, pomocną w lepszym używaniu komputera. Copyright
Dell UltraSharp UP3017 Dell Display Manager Instrukcja użytkownika Model: UP3017 Model - zgodność z przepisami: UP3017t UWAGA: UWAGA oznacza ważną informację, pomocną w lepszym używaniu komputera. Copyright
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
HYDROVAR Zalety układów pompowych z systemami HYDROVAR. Xylem Water Solutions
 HYDROVAR Zalety układów pompowych z systemami HYDROVAR Xylem Water Solutions Wszystkie niezbędne elementy w jednym urządzeniu Pompa odśrodkowa Falownik o stopniu IP55 Czujniki ciśnienia i inne Sterownik
HYDROVAR Zalety układów pompowych z systemami HYDROVAR Xylem Water Solutions Wszystkie niezbędne elementy w jednym urządzeniu Pompa odśrodkowa Falownik o stopniu IP55 Czujniki ciśnienia i inne Sterownik
EasyLog czyli jak archiwizować dane z Simatic S7-300/400
 EasyLog czyli jak archiwizować dane z Simatic S7-300/400 Przetestuj komunikację i zbieranie danych procesowych, zarówno będąc połączonym ze sterownikiem (Simatic S7), jak i wykorzystując symulator PLC.
EasyLog czyli jak archiwizować dane z Simatic S7-300/400 Przetestuj komunikację i zbieranie danych procesowych, zarówno będąc połączonym ze sterownikiem (Simatic S7), jak i wykorzystując symulator PLC.
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Product Update 2013. Funkcjonalność ADR dla przemienników Częstotliwości PowerFlex 750 oraz 525 6
 Product Update 2013 Funkcjonalność ADR dla przemienników Częstotliwości PowerFlex 750 oraz 525 6 Str. 2 / 15 Funkcjonalność ADR dla przemienników PF 750 Temat: Celem niniejszego ćwiczenia, jest zapoznanie
Product Update 2013 Funkcjonalność ADR dla przemienników Częstotliwości PowerFlex 750 oraz 525 6 Str. 2 / 15 Funkcjonalność ADR dla przemienników PF 750 Temat: Celem niniejszego ćwiczenia, jest zapoznanie
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
Laboratorium Elektroniki w Budowie Maszyn
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Laboratorium Napędu robotów
 WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Automatyka SZR. Korzyści dla klienta: [ Zabezpieczenia ] Seria Sepam. Sepam B83 ZASTOSOWANIE UKŁADY PRACY SZR
![Automatyka SZR. Korzyści dla klienta: [ Zabezpieczenia ] Seria Sepam. Sepam B83 ZASTOSOWANIE UKŁADY PRACY SZR](/thumbs/27/12223312.jpg "Automatyka SZR. Korzyści dla klienta: [ Zabezpieczenia ] Seria Sepam. Sepam B83 ZASTOSOWANIE UKŁADY PRACY SZR") 1 Automatyka SZR Sepam B83 ZASTOSOWANIE Sepam B83 standard / UMI Konieczność zachowania ciągłości dostaw energii elektrycznej do odbiorców wymusza na jej dostawcy stosowania specjalizowanych automatów
1 Automatyka SZR Sepam B83 ZASTOSOWANIE Sepam B83 standard / UMI Konieczność zachowania ciągłości dostaw energii elektrycznej do odbiorców wymusza na jej dostawcy stosowania specjalizowanych automatów
Modułowy programowalny przekaźnik czasowy firmy Aniro.
 Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Licznik prędkości LP100 rev. 2.48
 Licznik prędkości LP100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Licznik prędkości LP100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
falowniki JX - 9 Tabele danych strona - Wprowadzenie Parametry ustawiane za pomocą cyfrowego pulpitu sterowniczego falownika...
 falowniki JX Tabele danych - 9 strona - Wprowadzenie...262 - Parametry ustawiane za pomocą cyfrowego pulpitu sterowniczego...262 Dystrybutor falowników OMRON WEBSYSTEM Aleja Jana Pawła 85, 26-700 Zwoleń,
falowniki JX Tabele danych - 9 strona - Wprowadzenie...262 - Parametry ustawiane za pomocą cyfrowego pulpitu sterowniczego...262 Dystrybutor falowników OMRON WEBSYSTEM Aleja Jana Pawła 85, 26-700 Zwoleń,
SORTER DO BILONU. Glover HCS-31 INSTRUKCJA OBSŁUGI
 SORTER DO BILONU Glover HCS-31 INSTRUKCJA OBSŁUGI 1. Wstęp Urządzenie Glover HCS-31 moŝe sortować jednocześnie sześć rodzajów monet oraz realizuje zliczanie, przechowywanie i drukowanie wyników zliczania,
SORTER DO BILONU Glover HCS-31 INSTRUKCJA OBSŁUGI 1. Wstęp Urządzenie Glover HCS-31 moŝe sortować jednocześnie sześć rodzajów monet oraz realizuje zliczanie, przechowywanie i drukowanie wyników zliczania,
Galileo v10 pierwszy program
 Notatka Aplikacyjna NA 03011PL Galileo v10 Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Podstawy... 3 2.1. Tworzenie nowego projektu... 3 2.2. Dodawanie pola tekstowego... 10 2.3. Przechodzenie
Notatka Aplikacyjna NA 03011PL Galileo v10 Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Podstawy... 3 2.1. Tworzenie nowego projektu... 3 2.2. Dodawanie pola tekstowego... 10 2.3. Przechodzenie
Podstawy obsługi aplikacji Generator Wniosków Płatniczych
 Podstawy obsługi aplikacji Generator Wniosków Płatniczych 1. Instalacja programu Program naleŝy pobrać ze strony www.simik.gov.pl. Instalację naleŝy wykonań z konta posiadającego uprawnienia administratora
Podstawy obsługi aplikacji Generator Wniosków Płatniczych 1. Instalacja programu Program naleŝy pobrać ze strony www.simik.gov.pl. Instalację naleŝy wykonań z konta posiadającego uprawnienia administratora
Rodzaj kabla Kabel szeregowy skrosowany (tzw. zero modem kabel) Kabel USB host-to-host Kabel RS232/PPI multimaster Kabel USB/PPI multimaster *
 Kabel USB host-to-host Kabel RS232/PPI multimaster Kabel USB/PPI multimaster *") W zaleŝności od portów dostępnych w danym panelu operatorskim (RS232, RS422 lub USB), program moŝna wgrać za pomocą czterech rodzajów kabla: Rodzaj kabla Kabel szeregowy skrosowany (tzw. zero modem kabel)
W zaleŝności od portów dostępnych w danym panelu operatorskim (RS232, RS422 lub USB), program moŝna wgrać za pomocą czterech rodzajów kabla: Rodzaj kabla Kabel szeregowy skrosowany (tzw. zero modem kabel)
MAGISTRALA MODBUS W SIŁOWNIKU XSM Opis sterowania
 DTR Załącznik nr 5 MAGISTRALA MODBUS W SIŁOWNIKU XSM Opis sterowania Wydanie 2 czerwiec 2012 r. 1 Załącznik nr 5 DTR Rys.1 Rozmieszczenie złączy i mikroprzełączników na płytce modułu MODBUS 1. Zasilenie
DTR Załącznik nr 5 MAGISTRALA MODBUS W SIŁOWNIKU XSM Opis sterowania Wydanie 2 czerwiec 2012 r. 1 Załącznik nr 5 DTR Rys.1 Rozmieszczenie złączy i mikroprzełączników na płytce modułu MODBUS 1. Zasilenie
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
MIKROPROCESOROWY STEROWNIK PARAMETRÓW KLIMATYCZNYCH
 MIKROPROCESOROWY STEROWNIK PARAMETRÓW KLIMATYCZNYCH MPSK-G0 Opis Danych Technicznych wersja 2 1/5 1. Budowa i opis działania regulatora. 1.1. Przeznaczenie Panel wraz z układem wentylatorów przeznaczony
MIKROPROCESOROWY STEROWNIK PARAMETRÓW KLIMATYCZNYCH MPSK-G0 Opis Danych Technicznych wersja 2 1/5 1. Budowa i opis działania regulatora. 1.1. Przeznaczenie Panel wraz z układem wentylatorów przeznaczony
1. Opis. 2. Wymagania sprzętowe:
 1. Opis Aplikacja ARSOFT-WZ2 umożliwia konfigurację, wizualizację i rejestrację danych pomiarowych urządzeń produkcji APAR wyposażonych w interfejs komunikacyjny RS232/485 oraz protokół MODBUS-RTU. Aktualny
1. Opis Aplikacja ARSOFT-WZ2 umożliwia konfigurację, wizualizację i rejestrację danych pomiarowych urządzeń produkcji APAR wyposażonych w interfejs komunikacyjny RS232/485 oraz protokół MODBUS-RTU. Aktualny
3. Sieć PLAN. 3.1 Adresowanie płyt głównych regulatora pco
 3. Sieć PLAN Wszystkie urządzenia podłączone do sieci plan są identyfikowane za pomocą swoich adresów. Ponieważ terminale użytkownika i płyty główne pco wykorzystują ten sam rodzaj adresów, nie mogą posiadać
3. Sieć PLAN Wszystkie urządzenia podłączone do sieci plan są identyfikowane za pomocą swoich adresów. Ponieważ terminale użytkownika i płyty główne pco wykorzystują ten sam rodzaj adresów, nie mogą posiadać
Elektroniczny Termostat pojemnościowych ogrzewaczy wody
 Elektroniczny Termostat pojemnościowych ogrzewaczy wody ETE-1 Instrukcja obsługi Załącznik do Instrukcji obsługi i użytkowania elektrycznego pojemnościowego ogrzewacza wody typ WJ-Q i WJW-Q Zakład Urządzeń
Elektroniczny Termostat pojemnościowych ogrzewaczy wody ETE-1 Instrukcja obsługi Załącznik do Instrukcji obsługi i użytkowania elektrycznego pojemnościowego ogrzewacza wody typ WJ-Q i WJW-Q Zakład Urządzeń
Karta Programowania RM ( z wyj. ciągłym ) Nr Strona 1 Stron 7
 Nr Strona 1 Stron 7") Karta Programowania RM 20 10 ( z wyj. ciągłym ) Nr Strona 1 1. Celem KARTY PROGRAMOWANIA jest umoŝliwienie uŝytkownikowi poznanie regulatora w zakresie wszystkich działań związanych z obsługą. 2. Układ
Karta Programowania RM 20 10 ( z wyj. ciągłym ) Nr Strona 1 1. Celem KARTY PROGRAMOWANIA jest umoŝliwienie uŝytkownikowi poznanie regulatora w zakresie wszystkich działań związanych z obsługą. 2. Układ
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1 Moduł Neuronu Cyfrowego
 1 Moduł Neuronu Cyfrowego Moduł Neuronu Cyfrowego daje użytkownikowi Systemu Vision możliwość obsługi fizycznych Neuronów Cyfrowych. Dzięki temu możliwe jest sterowanie zewnętrznymi urządzeniami wykonawczymi
1 Moduł Neuronu Cyfrowego Moduł Neuronu Cyfrowego daje użytkownikowi Systemu Vision możliwość obsługi fizycznych Neuronów Cyfrowych. Dzięki temu możliwe jest sterowanie zewnętrznymi urządzeniami wykonawczymi
Ćwiczenia z S7-1200. Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP.
 Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
SZAFA ZASILAJĄCO-STERUJĄCA ZESTAWU DWUPOMPOWEGO DLA POMPOWNI ŚCIEKÓW P2 RUDZICZKA UL. SZKOLNA
 SZAFA ZASILAJĄCO-STERUJĄCA ZESTAWU DWUPOMPOWEGO DLA POMPOWNI ŚCIEKÓW P2 RUDZICZKA UL. SZKOLNA Spis treści 1. OPIS TECHNICZNY STR. 3 2. ZASADA DZIAŁANIA STR. 5 3. ZDALNY MONITORING STR. 6 4. INTERFEJS UŻYTKOWNIKA
SZAFA ZASILAJĄCO-STERUJĄCA ZESTAWU DWUPOMPOWEGO DLA POMPOWNI ŚCIEKÓW P2 RUDZICZKA UL. SZKOLNA Spis treści 1. OPIS TECHNICZNY STR. 3 2. ZASADA DZIAŁANIA STR. 5 3. ZDALNY MONITORING STR. 6 4. INTERFEJS UŻYTKOWNIKA
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
1 Zasady bezpieczeństwa
 1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
INDU-40. Przemysłowy Sterownik Mikroprocesorowy. Przeznaczenie. Dozowniki płynów, mieszacze płynów.
 Przemysłowy Sterownik Mikroprocesorowy INDU-40 Przeznaczenie Dozowniki płynów, mieszacze płynów. Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77, Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl
Przemysłowy Sterownik Mikroprocesorowy INDU-40 Przeznaczenie Dozowniki płynów, mieszacze płynów. Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77, Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl
Parametryzacja przetworników analogowocyfrowych
 Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Falownik MOTOVARIO LM16. Skrócona instrukcja obsługi
 Falownik MOTOVARIO LM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Falownik MOTOVARIO LM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Komunikacja Master-Slave w protokole PROFIBUS DP pomiędzy S7-300/S7-400
 PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników S7 300/S7 400, w celu stworzenia komunikacji Master Slave z wykorzystaniem sieci PROFIBUS DP pomiędzy sterownikami S7 300 i S7
PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników S7 300/S7 400, w celu stworzenia komunikacji Master Slave z wykorzystaniem sieci PROFIBUS DP pomiędzy sterownikami S7 300 i S7
Instrukcja obsługi sterownika Novitek Triton
 Instrukcja obsługi sterownika Triton I. Zastosowanie Sterownik TRITON przeznaczony jest do obsługi generatorów. Sterownik ten jest wyposażony w funkcję sterowania przekaźnikiem światła oraz przekaźnikiem
Instrukcja obsługi sterownika Triton I. Zastosowanie Sterownik TRITON przeznaczony jest do obsługi generatorów. Sterownik ten jest wyposażony w funkcję sterowania przekaźnikiem światła oraz przekaźnikiem
Przedpłatowy System Radiowy IVP (PSR IVP)
") Przedpłatowy System Radiowy IVP (PSR IVP) www.amps.com.pl 1 ver. 1.00 SPIS TREŚCI: 1. OBSŁUGA MENU ADMINISTRATORA SYSTEMU PSR IVP... 3 Menu Administratora... 3 Pozycja 0 Doładowanie... 3 Pozycja 1 Jednostki...
Przedpłatowy System Radiowy IVP (PSR IVP) www.amps.com.pl 1 ver. 1.00 SPIS TREŚCI: 1. OBSŁUGA MENU ADMINISTRATORA SYSTEMU PSR IVP... 3 Menu Administratora... 3 Pozycja 0 Doładowanie... 3 Pozycja 1 Jednostki...
POWIADOMIENIE SMS ALBATROSS S2. Opis aplikacji do programowania
 POWIADOMIENIE SMS ALBATROSS S2 Opis aplikacji do programowania 1 Spis treści 1. OPIS I URUCHOMIENIE APLIKACJI DO PROGRAMOWANIA ALBATROSS S2... 3 2. NAWIĄZANIE POŁĄCZENIA APLIKACJI Z URZĄDZENIEM ALBATROSS
POWIADOMIENIE SMS ALBATROSS S2 Opis aplikacji do programowania 1 Spis treści 1. OPIS I URUCHOMIENIE APLIKACJI DO PROGRAMOWANIA ALBATROSS S2... 3 2. NAWIĄZANIE POŁĄCZENIA APLIKACJI Z URZĄDZENIEM ALBATROSS
Sterownik nagrzewnic elektrycznych HE module
 Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe