Use of the ball-bar measuring system to investigate the properties of parallel kinematics mechanism
|
|
|
- Sebastian Mucha
- 9 lat temu
- Przeglądów:
Transkrypt
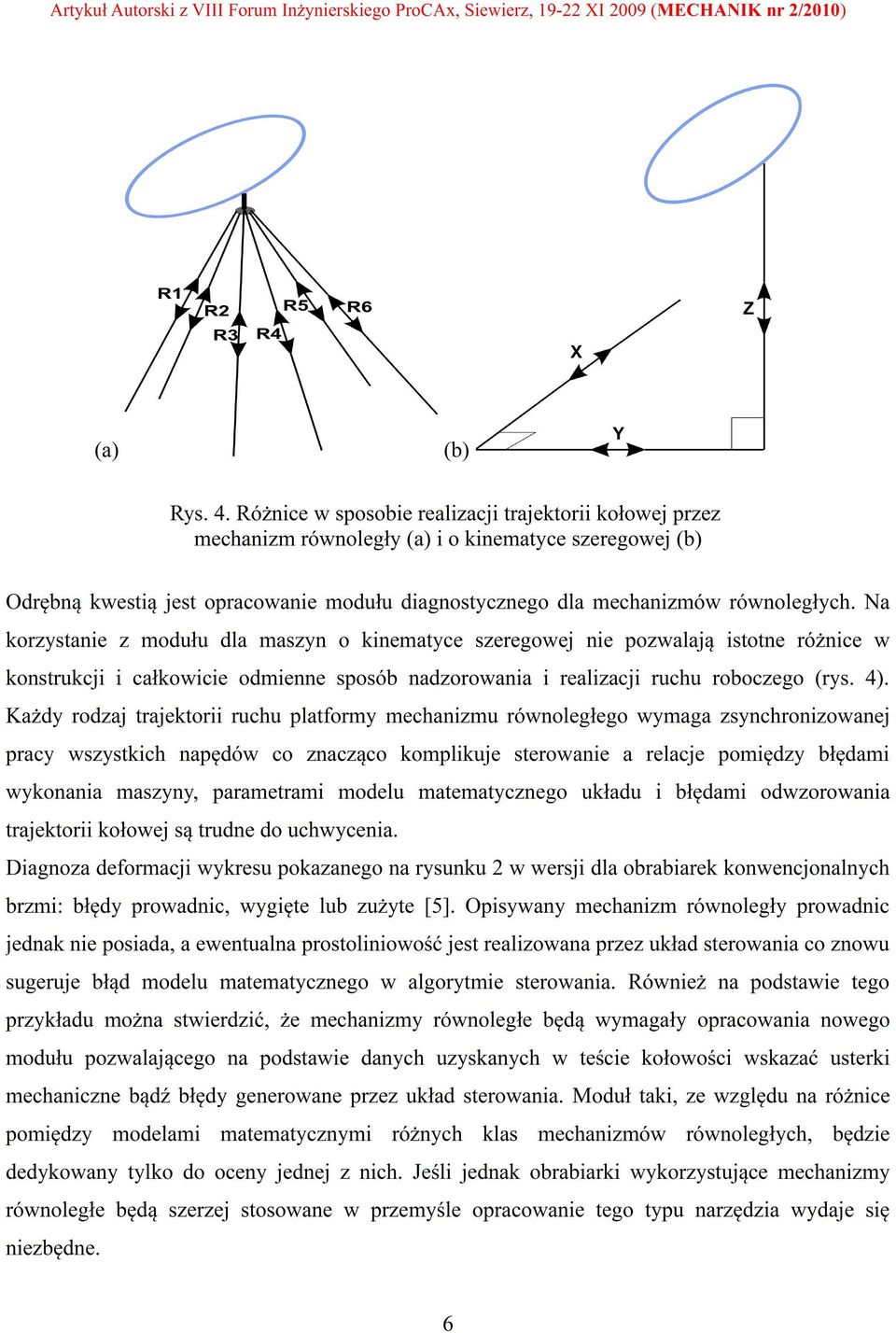
1 Artykuł Autorski z VIII Forum Inżynierskiego ProCAx, Siewierz, XI 2009 (MECHANIK nr 2/2010) Dr inż. Krzysztof Chrapek, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, mgr inż. Paweł Maślak Politechnika Wrocławska, Instytut Technologii Maszyn i Automatyzacji Zastosowanie przyrządu pomiarowego typu ball-bar do badania właściwości mechanizmu o kinematyce równoległej W artykule przedstawiono wyniki pomiarów dokładności odwzorowania trajektorii kołowej przez platformę mechanizmu o kinematyce równoległej. Interpretacja wyników pozwala na ocenę właściwości mechanizmu oraz wskazuje kierunek dalszych prac nad kalibracją oraz diagnostyką hexapodów. Use of the ball-bar measuring system to investigate the properties of parallel kinematics mechanism The article presents the measurement results of the parallel mechanism platform position accuracy during movement along circular trajectory. Interpretation of results allows the assessment of the mechanism properties and also indicates directions for further work on calibration and diagnostic of the hexapod-type machines. 1. WSTĘP Badany mechanizm o kinematyce równoległej (hexapod Felix II) posiada 6 stopni swobody. Ruch platformy jest uzyskiwany poprzez zmianę długości ramion połączonych przegubowo z podstawą i z platformą (rys.1). Do ich napędu zastosowano sześć jednostek serwonapędowych z tocznymi śrubami pociągowymi. Takie i podobne mechanizmy równoległe są używane w konstrukcji robotów, obrabiarek i innych maszyn technologicznych [1,4]. W Instytucie Technologii Maszyn i Automatyzacji Politechniki Wrocławskiej prowadzone są aktualnie prace, których celem jest przystosowanie badanego mechanizmu do realizacji określonych zadań obróbkowych na drodze frezowania. W tym celu wyposażono go m.in. we wrzeciono szybkoobrotowe. Frezarka jako urządzenie technologiczne musi charakteryzować się dokładnym odwzorowaniem zadanej trajektorii ruchu ponieważ ma to bezpośrednie przełożenie na cechy geometryczne obrabianej powierzchni. Konieczne więc stało się sprawdzenie posiadanej maszyny pod kątem dokładności odtworzenia zadanej trajektorii. Do realizacji tego celu wybrano przyrząd pomiarowy 1


2

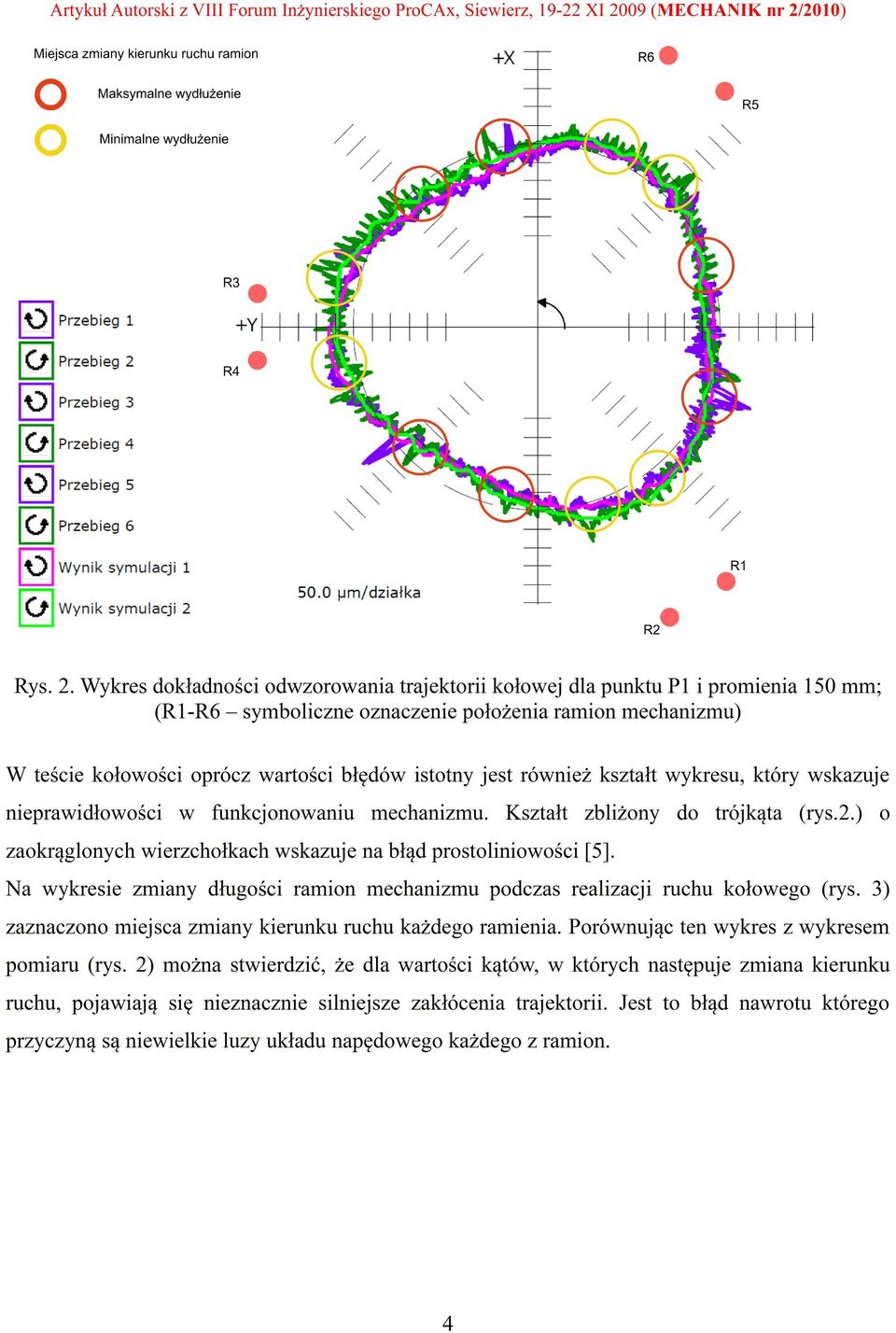
3 Artykuł Autorski z VIII Forum Inżynierskiego ProCAx, Siewierz, XI 2009 (MECHANIK nr 2/2010) sekundę. Ruch odbywał się zgodnie i przeciwnie do kierunku ruchu wskazówek zegara. Dla każdego położenia środka okręgu i długości promienia wykonano kilka cykli pomiarowych. Uzyskane z tych pomiarów wartości średnie stanowiły podstawę do analizy i oceny. 3. WYNIKI POMIARÓW Na wykresach zaobserwowano następujące niedoskonałości odwzorowania trajektorii kołowej: odchyłkę kołowości, wyraźne regularne odkształcenie okręgu, wzrost wartości odchyłki w miejscach zmiany kierunku ruchu ramion, znaczna amplituda i częstość zmian długości promienia. Zarejestrowane wartości błędów odwzorowania okręgu o promieniu 150 mm mieściły się w przedziale od ± 0,1 mm (rys. 1) dla okręgów o środku w punkcie P0 do ± 0,5 mm dla okręgów o środkach w punktach P1 i P2. Dla większych promieni okręgu testowego zaobserwowano błędy w przedziale od ± 0,2 mm do ± 0,7 mm. Wyniki takie uzyskano bez pełnej kalibracji mechanizmu tzn. wykonano pomiary geometrii mechanizmu oraz uwzględniono charakterystyki wysuwu ramion. Pomiary takie znacząco poprawiają funkcjonowanie mechanizmu są jednak obarczone błędami, które nie pozwalają na przekroczenie pewnego progu dokładności działania mechanizmu. Dalsza poprawa wymaga zastosowania dedykowanych procedur łączących pomiary i dokładną parametryzację modelu matematycznego mechanizmu. 3

4
5

6
7 Artykuł Autorski z VIII Forum Inżynierskiego ProCAx, Siewierz, XI 2009 (MECHANIK nr 2/2010) Moduł diagnostyczny powinien się składać z następujących składników: bazy wiedzy o relacji pomiędzy błędami i usterkami mechanizmu i zmianami w przebiegu trajektorii ruchu po okręgu, bazy wiedzy o błędach trajektorii kołowej generowanych przez niewłaściwe działanie układu sterowania i napędów, interpretera konfrontującego wyniki pomiarów z wiedzą zgromadzoną w bazach. Konieczne może być również opracowanie innego przyrządu pomiarowego umożliwiającego pomiar podczas testów więcej niż jednej wartości. Za takim rozwiązaniem przemawia znacznie większa liczba zależności pomiędzy parametrami układu a realizowaną trajektorią. Nowy układ pomiarowy pozwoli również na poprawę przebiegu procesu kalibracji [3]. Tworzenie baz wiedzy wymagać będzie w pierwszej kolejności wykonania szeregu symulacji a później ich weryfikacji w badaniach na obiekcie. Dla celów pomiarowych można rozregulować układ sterowania maszyny i za pomącą pomiarów dokładności jej pracy znaleźć źródło i wartości wprowadzonych błędów. Znacznie trudniejsze w weryfikacji będzie odwzorowanie trajektorii kołowej błędów generowanych przez usterki układu mechanicznego. 5. PODSUMOWANIE Opisane w artykule badania stanowią pierwszy krok w kierunku opracowania systemu umożliwiającego szybką diagnozę maszyn o kinematyce równoległej. W tym celu konieczne będzie wykonanie szeregu badań symulacyjnych, pomiarów oraz opracowanie metod interpretacji wyników. Stopień skomplikowania tego zadania może wymusić opracowanie nowego przyrządu pomiarowego dostarczającego więcej danych do analizy. LITERATURA [1] Koch T., Iżykowski S.: Zastosowanie kinematyk równoległych w budowie obrabiarek. Konf. Nauk. "Manufacturing '01", ITM Polit.Pozn., Poznań, [2] Grossmann K., Kauschinger B.: Räumliche Referenzierung an Werkzeugmaschinen mit dem Double-Ball-Bar, ZWF Jahrg. 103 (2008) 3. [3] Honczarenko J., Kwaśniewicz J.: Nowe systemy pomiarowe do sprawdzania dokładności obrabiarek CNC. Mechanik, nr 12/2008. [4] Merlt J.-P.: Parallel Robots, Kluwer Academic Publishers, Dordrecht, [5] Instrukcja obsługi przyrządu Ball-bar firmy Renishaw. 7

Wyznaczanie sił w przegubach maszyny o kinematyce równoległej w trakcie pracy, z wykorzystaniem metod numerycznych
 kinematyka równoległa, symulacja, model numeryczny, sterowanie mgr inż. Paweł Maślak, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, dr inż. Krzysztof Chrapek Wyznaczanie sił w przegubach maszyny o
kinematyka równoległa, symulacja, model numeryczny, sterowanie mgr inż. Paweł Maślak, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, dr inż. Krzysztof Chrapek Wyznaczanie sił w przegubach maszyny o
KINEMATYKA ODWROTNA TRIPODA Z NAPĘDEM MIMOŚRODOWYM
 4-2007 PROBLEMY EKSPLOATACJI 275 Andrzej ZBROWSKI Instytut Technologii Eksploatacji PIB, Radom Krzysztof ZAGROBA Politechnika Warszawska, Warszawa KINEMATYKA ODWROTNA TRIPODA Z NAPĘDEM MIMOŚRODOWYM Słowa
4-2007 PROBLEMY EKSPLOATACJI 275 Andrzej ZBROWSKI Instytut Technologii Eksploatacji PIB, Radom Krzysztof ZAGROBA Politechnika Warszawska, Warszawa KINEMATYKA ODWROTNA TRIPODA Z NAPĘDEM MIMOŚRODOWYM Słowa
IDENTYFIKACJA BŁĘDÓW PIONOWEGO CENTRUM FREZARSKIEGO ZA POMOCĄ SYSTEMU BALL - BAR ORAZ ICH KOREKCJA POPRZEZ POZIOMOWANIE OBRABIARKI.
 DOI: 10.17814/mechanik.2015.8-9.459 Dr inż. Jan KACZMAREK (COMMON S.A.), mgr inż. Sebastian LANGE (COMMON S.A.), dr inż. Robert ŚWIĘCIK (Politechnika Łódzka), mgr inż. Artur ŻURAWSKI (COMMON S.A.): IDENTYFIKACJA
DOI: 10.17814/mechanik.2015.8-9.459 Dr inż. Jan KACZMAREK (COMMON S.A.), mgr inż. Sebastian LANGE (COMMON S.A.), dr inż. Robert ŚWIĘCIK (Politechnika Łódzka), mgr inż. Artur ŻURAWSKI (COMMON S.A.): IDENTYFIKACJA
KOMPENSACJA CYKLICZNEGO BŁĘDU ŚRUBY POCIĄGOWEJ W OBRABIARKACH STEROWANYCH NUMERYCZNIE
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 41, s. 243-250, Gliwice 2011 KOMPENSACJA CYKLICZNEGO BŁĘDU ŚRUBY POCIĄGOWEJ W OBRABIARKACH STEROWANYCH NUMERYCZNIE PAWEŁ MAJDA, ARKADIUSZ PARUS Instytut Technologii
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 41, s. 243-250, Gliwice 2011 KOMPENSACJA CYKLICZNEGO BŁĘDU ŚRUBY POCIĄGOWEJ W OBRABIARKACH STEROWANYCH NUMERYCZNIE PAWEŁ MAJDA, ARKADIUSZ PARUS Instytut Technologii
Szkolenia z zakresu obsługi i programowania obrabiarek sterowanych numerycznie CNC
 Kompleksowa obsługa CNC www.mar-tools.com.pl Szkolenia z zakresu obsługi i programowania obrabiarek sterowanych numerycznie CNC Firma MAR-TOOLS prowadzi szkolenia z obsługi i programowania tokarek i frezarek
Kompleksowa obsługa CNC www.mar-tools.com.pl Szkolenia z zakresu obsługi i programowania obrabiarek sterowanych numerycznie CNC Firma MAR-TOOLS prowadzi szkolenia z obsługi i programowania tokarek i frezarek
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
METODYKA BADAŃ DOKŁADNOŚCI I POWTARZALNOŚCI ODWZOROWANIA TRAJEKTORII ROBOTA PRZEMYSŁOWEGO FANUC M-16iB
 METODYKA BADAŃ DOKŁADNOŚCI I POWTARZALNOŚCI ODWZOROWANIA TRAJEKTORII ROBOTA PRZEMYSŁOWEGO FANUC M-16iB Marcin WIŚNIEWSKI Jan ŻUREK Olaf CISZAK Streszczenie W pracy omówiono szczegółowo metodykę pomiaru
METODYKA BADAŃ DOKŁADNOŚCI I POWTARZALNOŚCI ODWZOROWANIA TRAJEKTORII ROBOTA PRZEMYSŁOWEGO FANUC M-16iB Marcin WIŚNIEWSKI Jan ŻUREK Olaf CISZAK Streszczenie W pracy omówiono szczegółowo metodykę pomiaru
WYBÓR PUNKTÓW POMIAROWYCH
 Scientific Bulletin of Che lm Section of Technical Sciences No. 1/2008 WYBÓR PUNKTÓW POMIAROWYCH WE WSPÓŁRZĘDNOŚCIOWEJ TECHNICE POMIAROWEJ MAREK MAGDZIAK Katedra Technik Wytwarzania i Automatyzacji, Politechnika
Scientific Bulletin of Che lm Section of Technical Sciences No. 1/2008 WYBÓR PUNKTÓW POMIAROWYCH WE WSPÓŁRZĘDNOŚCIOWEJ TECHNICE POMIAROWEJ MAREK MAGDZIAK Katedra Technik Wytwarzania i Automatyzacji, Politechnika
www.prolearning.pl/cnc
 Gwarantujemy najnowocześniejsze rozwiązania edukacyjne, a przede wszystkim wysoką efektywność szkolenia dzięki części praktycznej, która odbywa się w zakładzie obróbki mechanicznej. Cele szkolenia 1. Zdobycie
Gwarantujemy najnowocześniejsze rozwiązania edukacyjne, a przede wszystkim wysoką efektywność szkolenia dzięki części praktycznej, która odbywa się w zakładzie obróbki mechanicznej. Cele szkolenia 1. Zdobycie
KURSY CAD, CAM I CNC (POZIOM PODSTAWOWY I ZAAWANSOWANY)
") Szkolenia organizowane przy współpracy z Polskim Stowarzyszeniem Upowszechniania Komputerowych Systemów Inżynierskich ProCAx Kursy prowadzą doświadczeni pracownicy działu szkolenia producenta oprogramowania,
Szkolenia organizowane przy współpracy z Polskim Stowarzyszeniem Upowszechniania Komputerowych Systemów Inżynierskich ProCAx Kursy prowadzą doświadczeni pracownicy działu szkolenia producenta oprogramowania,
DIGITALIZACJA GEOMETRII WKŁADEK OSTRZOWYCH NA POTRZEBY SYMULACJI MES PROCESU OBRÓBKI SKRAWANIEM
 Dr inż. Witold HABRAT, e-mail: witekhab@prz.edu.pl Politechnika Rzeszowska, Wydział Budowy Maszyn i Lotnictwa Dr hab. inż. Piotr NIESŁONY, prof. PO, e-mail: p.nieslony@po.opole.pl Politechnika Opolska,
Dr inż. Witold HABRAT, e-mail: witekhab@prz.edu.pl Politechnika Rzeszowska, Wydział Budowy Maszyn i Lotnictwa Dr hab. inż. Piotr NIESŁONY, prof. PO, e-mail: p.nieslony@po.opole.pl Politechnika Opolska,
WYZNACZANIE DOKŁADNOŚCI URZĄDZEŃ TECHNOLOGICZNYCH METODĄ INTERPOLACJI KOŁOWEJ
 2/2010 TECHNOLOGIA I AUTOMATYZACJA MONTAŻU WYZNACZANIE DOKŁADNOŚCI URZĄDZEŃ TECHNOLOGICZNYCH METODĄ INTERPOLACJI KOŁOWEJ Tadeusz KOWALSKI, Robert JASTRZĘBSKI, Anna SZEPKE, Paweł OSÓWNIAK ZAKRES ZASTOSOWANIA
2/2010 TECHNOLOGIA I AUTOMATYZACJA MONTAŻU WYZNACZANIE DOKŁADNOŚCI URZĄDZEŃ TECHNOLOGICZNYCH METODĄ INTERPOLACJI KOŁOWEJ Tadeusz KOWALSKI, Robert JASTRZĘBSKI, Anna SZEPKE, Paweł OSÓWNIAK ZAKRES ZASTOSOWANIA
Sprawozdanie członka Zarządu KRD mgr inż. Paweł Maślak
 Sprawozdanie członka Zarządu KRD mgr inż. Paweł Maślak Cele prezentowane w 2011 roku Poszukiwanie grantów i funduszy na działalność i stypendia dla doktorantów Narodowe Centrum Nauki Narodowe Centrum Badao
Sprawozdanie członka Zarządu KRD mgr inż. Paweł Maślak Cele prezentowane w 2011 roku Poszukiwanie grantów i funduszy na działalność i stypendia dla doktorantów Narodowe Centrum Nauki Narodowe Centrum Badao
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika UKŁADY NAPĘDOWE MASZYN I URZĄDZEO Drive systems of machines and devices Forma studiów: stacjonarne Kod przedmiotu: B04 Rodzaj przedmiotu: obowiązkowy dla kierunku
Nazwa przedmiotu: Kierunek: Mechatronika UKŁADY NAPĘDOWE MASZYN I URZĄDZEO Drive systems of machines and devices Forma studiów: stacjonarne Kod przedmiotu: B04 Rodzaj przedmiotu: obowiązkowy dla kierunku
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
METODA POMIARU DOKŁADNOŚCI KINEMATYCZNEJ PRZEKŁADNI ŚLIMAKOWYCH
 METODA POMIARU DOKŁADNOŚCI KINEMATYCZNEJ PRZEKŁADNI ŚLIMAKOWYCH Dariusz OSTROWSKI 1, Tadeusz MARCINIAK 1 1. WSTĘP Dokładność przeniesienia ruchu obrotowego w precyzyjnych przekładaniach ślimakowych zwanych
METODA POMIARU DOKŁADNOŚCI KINEMATYCZNEJ PRZEKŁADNI ŚLIMAKOWYCH Dariusz OSTROWSKI 1, Tadeusz MARCINIAK 1 1. WSTĘP Dokładność przeniesienia ruchu obrotowego w precyzyjnych przekładaniach ślimakowych zwanych
Przedmiotowy system oceniania - kwalifikacja M19. Podstawy konstrukcji maszyn. Przedmiot: Technologia naprawy elementów maszyn narzędzi i urządzeń
 Przedmiotowy system oceniania - kwalifikacja M19 KL II i III TM Podstawy konstrukcji maszyn nauczyciel Andrzej Maląg Przedmiot: Technologia naprawy elementów maszyn narzędzi i urządzeń CELE PRZEDMIOTOWEGO
Przedmiotowy system oceniania - kwalifikacja M19 KL II i III TM Podstawy konstrukcji maszyn nauczyciel Andrzej Maląg Przedmiot: Technologia naprawy elementów maszyn narzędzi i urządzeń CELE PRZEDMIOTOWEGO
WPŁYW METODY DOPASOWANIA NA WYNIKI POMIARÓW PIÓRA ŁOPATKI INFLUENCE OF BEST-FIT METHOD ON RESULTS OF COORDINATE MEASUREMENTS OF TURBINE BLADE
 Dr hab. inż. Andrzej Kawalec, e-mail: ak@prz.edu.pl Dr inż. Marek Magdziak, e-mail: marekm@prz.edu.pl Politechnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Katedra Technik Wytwarzania i Automatyzacji
Dr hab. inż. Andrzej Kawalec, e-mail: ak@prz.edu.pl Dr inż. Marek Magdziak, e-mail: marekm@prz.edu.pl Politechnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Katedra Technik Wytwarzania i Automatyzacji
POMIARY ODCHYLEŃ KĄTOWYCH STOŁU PIONOWEGO CENTRUM FREZARSKIEGO AVIA VMC 800. Streszczenie
 DOI: 10.17814/mechanik.2015.8-9.471 Mgr inż. Piotr MAJ; dr hab. inż. Edward MIKO, prof. PŚk (Politechnika Świętokrzyska): POMIARY ODCHYLEŃ KĄTOWYCH STOŁU PIONOWEGO CENTRUM FREZARSKIEGO AVIA VMC 800 Streszczenie
DOI: 10.17814/mechanik.2015.8-9.471 Mgr inż. Piotr MAJ; dr hab. inż. Edward MIKO, prof. PŚk (Politechnika Świętokrzyska): POMIARY ODCHYLEŃ KĄTOWYCH STOŁU PIONOWEGO CENTRUM FREZARSKIEGO AVIA VMC 800 Streszczenie
DOKŁADNOŚĆ KSZTAŁTOWA POWIERZCHNI ZŁOŻONEJ PO PROCESACH SYMULTANICZNEGO 5-OSIOWEGO FREZOWANIA PUNKTOWEGO ORAZ OBWODOWEGO.
 DOI: 10.17814/mechanik.2015.8-9.481 Dr hab. inż. Jan BUREK, prof. PRz; mgr inż. Karol ŻURAWSKI; mgr inż. Piotr ŻUREK, mgr inż. Jacek MISIURA (Politechnika Rzeszowska): DOKŁADNOŚĆ KSZTAŁTOWA POWIERZCHNI
DOI: 10.17814/mechanik.2015.8-9.481 Dr hab. inż. Jan BUREK, prof. PRz; mgr inż. Karol ŻURAWSKI; mgr inż. Piotr ŻUREK, mgr inż. Jacek MISIURA (Politechnika Rzeszowska): DOKŁADNOŚĆ KSZTAŁTOWA POWIERZCHNI
Tematy prac dyplomowych inżynierskich kierunek MiBM
 Tematy prac dyplomowych inżynierskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Inż/2013 002/I8/Inż/2013 003/I8/ Inż /2013 Wykonywanie otworów gwintowanych na obrabiarkach CNC. Projekt
Tematy prac dyplomowych inżynierskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Inż/2013 002/I8/Inż/2013 003/I8/ Inż /2013 Wykonywanie otworów gwintowanych na obrabiarkach CNC. Projekt
Temat: Skanowanie 3D obrazu w celu pomiaru odkształceń deski podobrazia
 Raport z przeprowadzonych badań Temat: Skanowanie 3D obrazu w celu pomiaru odkształceń deski podobrazia Spis treści Spis treści... 2 1.Cel badań... 3 2. Skanowanie 3D pozyskanie geometrii... 3 3. Praca
Raport z przeprowadzonych badań Temat: Skanowanie 3D obrazu w celu pomiaru odkształceń deski podobrazia Spis treści Spis treści... 2 1.Cel badań... 3 2. Skanowanie 3D pozyskanie geometrii... 3 3. Praca
INSTRUKCJA DO ZAJĘĆ LABORATORYJNYCH
 WYDZIAŁ INŻYNIERII ZARZĄDZANIA Katedra Zarządzania Produkcją INSTRUKCJA DO ZAJĘĆ LABORATORYJNYCH Laboratorium z przedmiotu: Temat: Procesy i techniki produkcyjne Obróbka frezarska z wykorzystaniem interpolacji
WYDZIAŁ INŻYNIERII ZARZĄDZANIA Katedra Zarządzania Produkcją INSTRUKCJA DO ZAJĘĆ LABORATORYJNYCH Laboratorium z przedmiotu: Temat: Procesy i techniki produkcyjne Obróbka frezarska z wykorzystaniem interpolacji
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Katedra Technik Wytwarzania i Automatyzacji INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH. Nr ćwiczenia: 1. Kierunek: Mechanika i Budowa Maszyn
 Nr ćwiczenia: 1 Rozwiązania konstrukcyjne maszyn CNC oraz ich możliwości technologiczne Celem ćwiczenia jest poznanie przez studentów struktur kinematycznych maszyn sterowanych numerycznie oraz poznanie
Nr ćwiczenia: 1 Rozwiązania konstrukcyjne maszyn CNC oraz ich możliwości technologiczne Celem ćwiczenia jest poznanie przez studentów struktur kinematycznych maszyn sterowanych numerycznie oraz poznanie
THE ANALYSIS OF THE MANUFACTURING OF GEARS WITH SMALL MODULES BY FDM TECHNOLOGY
 Prof. dr hab. inż. Tadeusz MARKOWSKI, e-mail: tmarkow@prz.edu.pl Dr hab. inż. Grzegorz BUDZIK, prof. PRz, e-mail: gbudzik@prz.edu.pl Dr inż. Bogdan KOZIK, e-mail: bogkozik@prz.edu.pl Mgr inż. Bartłomiej
Prof. dr hab. inż. Tadeusz MARKOWSKI, e-mail: tmarkow@prz.edu.pl Dr hab. inż. Grzegorz BUDZIK, prof. PRz, e-mail: gbudzik@prz.edu.pl Dr inż. Bogdan KOZIK, e-mail: bogkozik@prz.edu.pl Mgr inż. Bartłomiej
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy przedmiot kierunkowy Rodzaj zajęć: laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie
Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy przedmiot kierunkowy Rodzaj zajęć: laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie
ZAKRES AKREDYTACJI LABORATORIUM BADAWCZEGO Nr AB 504
 ZAKRES AKREDYTACJI LABORATORIUM BADAWCZEGO Nr AB 504 wydany przez POLSKIE CENTRUM AKREDYTACJI 01-382 Warszawa ul. Szczotkarska 42 Wydanie nr 11 Data wydania: 28 kwietnia 2015 r. Nazwa i adres INSTYTUT
ZAKRES AKREDYTACJI LABORATORIUM BADAWCZEGO Nr AB 504 wydany przez POLSKIE CENTRUM AKREDYTACJI 01-382 Warszawa ul. Szczotkarska 42 Wydanie nr 11 Data wydania: 28 kwietnia 2015 r. Nazwa i adres INSTYTUT
Projekt rejestratora obiektów trójwymiarowych na bazie frezarki CNC. The project of the scanner for three-dimensional objects based on the CNC
 Dr inż. Henryk Bąkowski, e-mail: henryk.bakowski@polsl.pl Politechnika Śląska, Wydział Transportu Mateusz Kuś, e-mail: kus.mate@gmail.com Jakub Siuta, e-mail: siuta.jakub@gmail.com Andrzej Kubik, e-mail:
Dr inż. Henryk Bąkowski, e-mail: henryk.bakowski@polsl.pl Politechnika Śląska, Wydział Transportu Mateusz Kuś, e-mail: kus.mate@gmail.com Jakub Siuta, e-mail: siuta.jakub@gmail.com Andrzej Kubik, e-mail:
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia I-go stopnia. Podstawy maszyn technologicznych Rodzaj przedmiotu: Język polski
 modułu/przedmiotu Mechanika i Budowa Maszyn Studia I-go stopnia. Podstawy maszyn technologicznych Rodzaj przedmiotu: Język polski") Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia I-go stopnia Przedmiot: Podstawy maszyn technologicznych Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MBM S 0 4 47-0 0 Rok: 2 Semestr:
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia I-go stopnia Przedmiot: Podstawy maszyn technologicznych Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MBM S 0 4 47-0 0 Rok: 2 Semestr:
INTERFEJS TDM ZOLLER VENTURION 600 ZASTOSOWANIE W PRZEMYŚLE. Streszczenie INTERFACE TDM ZOLLER VENTURION 600 USE IN THE INDUSTRY.
 DOI: 10.17814/mechanik.2015.8-9.461 Mgr inż. Tomasz DOBROWOLSKI, dr inż. Piotr SZABLEWSKI (Pratt & Whitney Kalisz): INTERFEJS TDM ZOLLER VENTURION 600 ZASTOSOWANIE W PRZEMYŚLE Streszczenie Przedstawiono
DOI: 10.17814/mechanik.2015.8-9.461 Mgr inż. Tomasz DOBROWOLSKI, dr inż. Piotr SZABLEWSKI (Pratt & Whitney Kalisz): INTERFEJS TDM ZOLLER VENTURION 600 ZASTOSOWANIE W PRZEMYŚLE Streszczenie Przedstawiono
PL B1. POLITECHNIKA WARSZAWSKA, Warszawa, PL INSTYTUT TECHNOLOGII EKSPLOATACJI. PAŃSTWOWY INSTYTUT BADAWCZY, Radom, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207917 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 380341 (22) Data zgłoszenia: 31.07.2006 (51) Int.Cl. G01B 21/04 (2006.01)
Metrologia II Metrology II. TRANSPORT I stopień (I stopień / II stopień) akademicki (ogólno akademicki / praktyczny)
 akademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Metrologia II Metrology II A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Metrologia II Metrology II A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
Metrologia II. Mechanika i Budowa Maszyn I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Metrologia II Nazwa modułu w języku angielskim Metrology II Obowiązuje od roku akademickiego 2013/2014 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Metrologia II Nazwa modułu w języku angielskim Metrology II Obowiązuje od roku akademickiego 2013/2014 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KRZYSZTOF DZIK 1, PIOTR PRACH 2
 Wydawnictwo UR 2018 ISSN 2080-9069 ISSN 2450-9221 online Edukacja Technika Informatyka nr 3/25/2018 www.eti.rzeszow.pl DOI: 10.15584/eti.2018.3.45 KRZYSZTOF DZIK 1, PIOTR PRACH 2 Analiza dokładności interpolacji
Wydawnictwo UR 2018 ISSN 2080-9069 ISSN 2450-9221 online Edukacja Technika Informatyka nr 3/25/2018 www.eti.rzeszow.pl DOI: 10.15584/eti.2018.3.45 KRZYSZTOF DZIK 1, PIOTR PRACH 2 Analiza dokładności interpolacji
Metrologia. Inżynieria Bezpieczeństwa I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2013/2014 Metrologia A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2013/2014 Metrologia A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: KOMPUTEROWE WSPOMAGANIE WYTWARZANIA CAM Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Nazwa przedmiotu: KOMPUTEROWE WSPOMAGANIE WYTWARZANIA CAM Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
MiBM II stopień (I stopień / II stopień) akademicki (ogólno akademicki / praktyczny) kierunkowy (podstawowy / kierunkowy / inny HES)
 akademicki (ogólno akademicki / praktyczny) kierunkowy (podstawowy / kierunkowy / inny HES)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Programowanie obrabiarek CNC i centrów obróbkowych Programming of CNC
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Programowanie obrabiarek CNC i centrów obróbkowych Programming of CNC
4. EKSPLOATACJA UKŁADU NAPĘD ZWROTNICOWY ROZJAZD. DEFINICJA SIŁ W UKŁADZIE Siła nastawcza Siła trzymania
 3 SPIS TREŚCI Przedmowa... 11 1. WPROWADZENIE... 13 1.1. Budowa rozjazdów kolejowych... 14 1.2. Napędy zwrotnicowe... 15 1.2.1. Napęd zwrotnicowy EEA-4... 18 1.2.2. Napęd zwrotnicowy EEA-5... 20 1.3. Współpraca
3 SPIS TREŚCI Przedmowa... 11 1. WPROWADZENIE... 13 1.1. Budowa rozjazdów kolejowych... 14 1.2. Napędy zwrotnicowe... 15 1.2.1. Napęd zwrotnicowy EEA-4... 18 1.2.2. Napęd zwrotnicowy EEA-5... 20 1.3. Współpraca
INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Politechnika Śląska w Gliwicach INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH BADANIE TWORZYW SZTUCZNYCH OZNACZENIE WŁASNOŚCI MECHANICZNYCH PRZY STATYCZNYM ROZCIĄGANIU
INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Politechnika Śląska w Gliwicach INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH BADANIE TWORZYW SZTUCZNYCH OZNACZENIE WŁASNOŚCI MECHANICZNYCH PRZY STATYCZNYM ROZCIĄGANIU
Przygotowanie do pracy frezarki CNC
 Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Przygotowanie do pracy frezarki CNC Cykl I Ćwiczenie 2 Opracował: dr inż. Krzysztof
Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Przygotowanie do pracy frezarki CNC Cykl I Ćwiczenie 2 Opracował: dr inż. Krzysztof
Instrukcja z przedmiotu Napęd robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
Metrologia II Metrology II. Transport I stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Metrologia II Metrology II A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Metrologia II Metrology II A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
Metrologia. Zarządzanie i Inżynieria Produkcji I stopień Ogólnoakademicki
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2013/2014 Metrologia A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2013/2014 Metrologia A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
CZĘŚĆ nr4. Pracownia CNC - oprogramowanie
 Pracownia symulacyjna CNC umoŝliwia symulację typowych sterowników CNC, interaktywne programowanie procesu obróbki CZĘŚĆ nr4 Dostawa i instalacja wyposaŝenia stanowisk do symulacyjnego programowania obrabiarek
Pracownia symulacyjna CNC umoŝliwia symulację typowych sterowników CNC, interaktywne programowanie procesu obróbki CZĘŚĆ nr4 Dostawa i instalacja wyposaŝenia stanowisk do symulacyjnego programowania obrabiarek
Metrologia II Metrology II
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Metrologia. Wzornictwo Przemysłowe I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Metrologia Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 014/015 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Metrologia Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 014/015 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
Odchudzamy serię danych, czyli jak wykryć i usunąć wyniki obarczone błędami grubymi
 Odchudzamy serię danych, czyli jak wykryć i usunąć wyniki obarczone błędami grubymi Piotr Konieczka Katedra Chemii Analitycznej Wydział Chemiczny Politechnika Gdańska D syst D śr m 1 3 5 2 4 6 śr j D 1
Odchudzamy serię danych, czyli jak wykryć i usunąć wyniki obarczone błędami grubymi Piotr Konieczka Katedra Chemii Analitycznej Wydział Chemiczny Politechnika Gdańska D syst D śr m 1 3 5 2 4 6 śr j D 1
Z-ID-604 Metrologia. Podstawowy Obowiązkowy Polski Semestr VI
 KARTA MODUŁU / KARTA PRZEDMIOTU Z-ID-604 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2015/2016 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
KARTA MODUŁU / KARTA PRZEDMIOTU Z-ID-604 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2015/2016 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
Z-ZIP-0101 Metrologia. Zarządzanie i Inżynieria Produkcji I stopień Ogólnoakademicki. Kierunkowy Obowiązkowy Polski Semestr czwarty
 KARTA MODUŁU / KARTA PRZEDMIOTU Z-ZIP-0101 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 01/013 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
KARTA MODUŁU / KARTA PRZEDMIOTU Z-ZIP-0101 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 01/013 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
WÓJCIK Ryszard 1 KĘPCZAK Norbert 2
 WÓJCIK Ryszard 1 KĘPCZAK Norbert 2 Wykorzystanie symulacji komputerowych do określenia odkształceń otworów w korpusie przekładni walcowej wielostopniowej podczas procesu obróbki skrawaniem WSTĘP Właściwa
WÓJCIK Ryszard 1 KĘPCZAK Norbert 2 Wykorzystanie symulacji komputerowych do określenia odkształceń otworów w korpusie przekładni walcowej wielostopniowej podczas procesu obróbki skrawaniem WSTĘP Właściwa
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: SYSTEMY PROJEKTOWANIA PROCESÓW TECHNOLOGICZNYCH Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności: Automatyzacja wytwarzania i robotyka Rodzaj zajęć:
Nazwa przedmiotu: SYSTEMY PROJEKTOWANIA PROCESÓW TECHNOLOGICZNYCH Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności: Automatyzacja wytwarzania i robotyka Rodzaj zajęć:
Proces technologiczny. 1. Zastosowanie cech technologicznych w systemach CAPP
 Pobożniak Janusz, Dr inż. Politechnika Krakowska, Wydział Mechaniczny e-mail: pobozniak@mech.pk.edu.pl Pozyskiwanie danych niegeometrycznych na użytek projektowania procesów technologicznych obróbki za
Pobożniak Janusz, Dr inż. Politechnika Krakowska, Wydział Mechaniczny e-mail: pobozniak@mech.pk.edu.pl Pozyskiwanie danych niegeometrycznych na użytek projektowania procesów technologicznych obróbki za
Tadeusz KOWALSKI 1 Robert JASTRZĘBSKI 2 METODY OCENY DOKŁADNOŚCI TECHNOLOGICZNEJ PRECYZYJNYCH TOKAREK CNC 1. WSTĘP
 InŜynieria Maszyn, R. 17, z. 2, 2012 tokarka NC, obróbka, dokładność, koncentracja, pomiary Tadeusz KOWALSKI 1 Robert JASTRZĘBSKI 2 METODY OCENY DOKŁADNOŚCI TECHNOLOGICZNEJ PRECYZYJNYCH TOKAREK CNC Wybrano
InŜynieria Maszyn, R. 17, z. 2, 2012 tokarka NC, obróbka, dokładność, koncentracja, pomiary Tadeusz KOWALSKI 1 Robert JASTRZĘBSKI 2 METODY OCENY DOKŁADNOŚCI TECHNOLOGICZNEJ PRECYZYJNYCH TOKAREK CNC Wybrano
Współrzędnościowa Technika Pomiarowa
 Współrzędnościowa Technika Pomiarowa Cel Szkolenia: Pomiary współrzędnościowe odgrywają bardzo istotną rolę w nowoczesnym zapewnieniu jakości, współrzędnościowe maszyny pomiarowe są obecnie najbardziej
Współrzędnościowa Technika Pomiarowa Cel Szkolenia: Pomiary współrzędnościowe odgrywają bardzo istotną rolę w nowoczesnym zapewnieniu jakości, współrzędnościowe maszyny pomiarowe są obecnie najbardziej
kierunkowy (podstawowy / kierunkowy / inny HES) obowiązkowy (obowiązkowy / nieobowiązkowy) Polski semestr pierwszy
 obowiązkowy (obowiązkowy / nieobowiązkowy) Polski semestr pierwszy") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
PRECYZYJNY MANIPULATOR O KINEMATYCE RÓWNOLEGŁEJ
 4-2007 PROBLEMY EKSPLOATACJI 265 Andrzej ZBROWSKI, Tomasz GIESKO, Piotr CZAJKA Instytut Technologii Eksploatacji PIB, Radom PRECYZYJNY MANIPULATOR O KINEMATYCE RÓWNOLEGŁEJ Słowa kluczowe Precyzyjne mechanizmy
4-2007 PROBLEMY EKSPLOATACJI 265 Andrzej ZBROWSKI, Tomasz GIESKO, Piotr CZAJKA Instytut Technologii Eksploatacji PIB, Radom PRECYZYJNY MANIPULATOR O KINEMATYCE RÓWNOLEGŁEJ Słowa kluczowe Precyzyjne mechanizmy
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie D - 4. Zastosowanie teoretycznej analizy modalnej w dynamice maszyn
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D - 4 Temat: Zastosowanie teoretycznej analizy modalnej w dynamice maszyn Opracowanie: mgr inż. Sebastian Bojanowski Zatwierdził:
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D - 4 Temat: Zastosowanie teoretycznej analizy modalnej w dynamice maszyn Opracowanie: mgr inż. Sebastian Bojanowski Zatwierdził:
WPŁYW ODKSZTAŁCENIA WZGLĘDNEGO NA WSKAŹNIK ZMNIEJSZENIA CHROPOWATOŚCI I STOPIEŃ UMOCNIENIA WARSTWY POWIERZCHNIOWEJ PO OBRÓBCE NAGNIATANEM
 Tomasz Dyl Akademia Morska w Gdyni WPŁYW ODKSZTAŁCENIA WZGLĘDNEGO NA WSKAŹNIK ZMNIEJSZENIA CHROPOWATOŚCI I STOPIEŃ UMOCNIENIA WARSTWY POWIERZCHNIOWEJ PO OBRÓBCE NAGNIATANEM W artykule określono wpływ odkształcenia
Tomasz Dyl Akademia Morska w Gdyni WPŁYW ODKSZTAŁCENIA WZGLĘDNEGO NA WSKAŹNIK ZMNIEJSZENIA CHROPOWATOŚCI I STOPIEŃ UMOCNIENIA WARSTWY POWIERZCHNIOWEJ PO OBRÓBCE NAGNIATANEM W artykule określono wpływ odkształcenia
Metrologia II Metrology II. Automatyka i Robotyka I stopień (I stopień / II stopień) akademicki (ogólno akademicki / praktyczny)
 akademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Metrologia II Metrology II A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Metrologia II Metrology II A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW Kierunek
PODSTAWY KONSTRUKCJI MASZYN
 KLASA I TECHNIKUM ZAWODOWE DZIAŁ : ODWZOROWANIE PRZEDMIOTÓW Stopień celujący otrzymuje uczeń, który: opanował w pełni wymagania programowe a jego wiadomości i umiejętności są twórcze (dodatkowe prace,
KLASA I TECHNIKUM ZAWODOWE DZIAŁ : ODWZOROWANIE PRZEDMIOTÓW Stopień celujący otrzymuje uczeń, który: opanował w pełni wymagania programowe a jego wiadomości i umiejętności są twórcze (dodatkowe prace,
WYTWARZANIE MECHANIZMÓW METODĄ FDM
 Mgr inż. Bartosz BLICHARZ Mgr inż. Maciej CADER Przemysłowy Instytut Automatyki i Pomiarów PIAP Piotr HERMANOWICZ Politechnika Warszawska DOI: 10.17814/mechanik.2015.7.211 WYTWARZANIE MECHANIZMÓW METODĄ
Mgr inż. Bartosz BLICHARZ Mgr inż. Maciej CADER Przemysłowy Instytut Automatyki i Pomiarów PIAP Piotr HERMANOWICZ Politechnika Warszawska DOI: 10.17814/mechanik.2015.7.211 WYTWARZANIE MECHANIZMÓW METODĄ
Wymagania edukacyjne
 mgr inż. Bogdan Czach Rzeszów, 6 września 2015 Wymagania edukacyjne z przedmiotu Metody obróbki skrawaniem Technik mechanik Moduł : Z5.01 Metody obróbki skrawaniem, Z5.02 Narzędzia skrawające, Z5.03 Mechanizmy
mgr inż. Bogdan Czach Rzeszów, 6 września 2015 Wymagania edukacyjne z przedmiotu Metody obróbki skrawaniem Technik mechanik Moduł : Z5.01 Metody obróbki skrawaniem, Z5.02 Narzędzia skrawające, Z5.03 Mechanizmy
Rok akademicki: 2016/2017 Kod: RME WM-s Punkty ECTS: 7. Kierunek: Inżynieria Mechatroniczna Specjalność: Wytwarzanie mechatroniczne
 Nazwa modułu: Obrabiarki sterowane numerycznie Rok akademicki: 2016/2017 Kod: RME-2-106-WM-s Punkty ECTS: 7 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Inżynieria Mechatroniczna Specjalność:
Nazwa modułu: Obrabiarki sterowane numerycznie Rok akademicki: 2016/2017 Kod: RME-2-106-WM-s Punkty ECTS: 7 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Inżynieria Mechatroniczna Specjalność:
Politechnika Krakowska im. Tadeusza Kościuszki KARTA PRZEDMIOTU. obowiązuje słuchaczy rozpoczynających studia podyplomowe w roku akademickim 2018/2019
 Wzór nr 3 Politechnika Krakowska im. Tadeusza Kościuszki KARTA PRZEDMIOTU obowiązuje słuchaczy rozpoczynających studia podyplomowe w roku akademickim 2018/2019 Nazwa studiów podyplomowych Technologie Informacyjne
Wzór nr 3 Politechnika Krakowska im. Tadeusza Kościuszki KARTA PRZEDMIOTU obowiązuje słuchaczy rozpoczynających studia podyplomowe w roku akademickim 2018/2019 Nazwa studiów podyplomowych Technologie Informacyjne
Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 05/06 Kierunek studiów: Inżynieria Produkcji Forma sudiów:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 05/06 Kierunek studiów: Inżynieria Produkcji Forma sudiów:
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka
 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
BADANIA WYBRANYCH CZUJNIKÓW TEMPERATURY WSPÓŁPRACUJĄCYCH Z KARTAMI POMIAROWYMI W LabVIEW
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 63 Politechniki Wrocławskiej Nr 63 Studia i Materiały Nr 29 2009 Krzysztof PODLEJSKI* czujniki temperatury, LabVIEW BADANIA WYBRANYCH
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 63 Politechniki Wrocławskiej Nr 63 Studia i Materiały Nr 29 2009 Krzysztof PODLEJSKI* czujniki temperatury, LabVIEW BADANIA WYBRANYCH
BADANIE DOKŁADNOŚCI POZYCJONOWANIA CENTRUM FREZARSKIEGO DMG DMU 50. Streszczenie RESEARCH OF POSITIONING ACCURACY OF THE DMG DMU50 MILLING CENTER
 DOI: 10.17814/mechanik.2015.8-9.456 Dr hab. inż. Edward MIKO, prof. PŚk; mgr inż. Piotr KUPIŃSKI (Politechnika Świętokrzyska): BADANIE DOKŁADNOŚCI POZYCJONOWANIA CENTRUM FREZARSKIEGO DMG DMU 50 Streszczenie
DOI: 10.17814/mechanik.2015.8-9.456 Dr hab. inż. Edward MIKO, prof. PŚk; mgr inż. Piotr KUPIŃSKI (Politechnika Świętokrzyska): BADANIE DOKŁADNOŚCI POZYCJONOWANIA CENTRUM FREZARSKIEGO DMG DMU 50 Streszczenie
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Forma studiów: stacjonarne Kierunek studiów: ZiIP Katedra: Technologii Maszyn i Automatyzacji Produkcji Projekt systemu modułowych separatorów przedmiotów dla docierarek jednotarczowych 1. Studia literatury
Forma studiów: stacjonarne Kierunek studiów: ZiIP Katedra: Technologii Maszyn i Automatyzacji Produkcji Projekt systemu modułowych separatorów przedmiotów dla docierarek jednotarczowych 1. Studia literatury
Karta (sylabus) przedmiotu
 przedmiotu") WM Karta (sylabus) przedmiotu Mechanika i Budowa Maszyn Studia I-go stopnia o profilu: A P Przedmiot: Podstawy maszyn technologicznych Kod przedmiotu Status przedmiotu: obowiązkowy MBM 1 S 0 4 47-0_0 Język
WM Karta (sylabus) przedmiotu Mechanika i Budowa Maszyn Studia I-go stopnia o profilu: A P Przedmiot: Podstawy maszyn technologicznych Kod przedmiotu Status przedmiotu: obowiązkowy MBM 1 S 0 4 47-0_0 Język
 Jerzy Józwik 1) OCENA ODCHY KI PROSTOPAD OŒCI OSI OBRABIARKI STEROWNEJ NUMERYCZNIE Z WYKORZYSTANIEM SYSTEMU QC10 BALLBAR Streszczenie. W pracy przedstawiono wybrane systemy diagnostyczne obrabiarek CNC.
Jerzy Józwik 1) OCENA ODCHY KI PROSTOPAD OŒCI OSI OBRABIARKI STEROWNEJ NUMERYCZNIE Z WYKORZYSTANIEM SYSTEMU QC10 BALLBAR Streszczenie. W pracy przedstawiono wybrane systemy diagnostyczne obrabiarek CNC.
WYDZIAŁ ELEKTRYCZNY. Optoelektroniczne pomiary aksjograficzne stawu skroniowo-żuchwowego człowieka
 dr inż. Witold MICKIEWICZ dr inż. Jerzy SAWICKI Optoelektroniczne pomiary aksjograficzne stawu skroniowo-żuchwowego człowieka Aksjografia obrazowanie ruchu osi zawiasowej żuchwy - Nowa metoda pomiarów
dr inż. Witold MICKIEWICZ dr inż. Jerzy SAWICKI Optoelektroniczne pomiary aksjograficzne stawu skroniowo-żuchwowego człowieka Aksjografia obrazowanie ruchu osi zawiasowej żuchwy - Nowa metoda pomiarów
Politechnika Poznańska Instytut Technologii Mechanicznej. Programowanie obrabiarek CNC. Nr 2. Obróbka z wykorzystaniem kompensacji promienia narzędzia
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Programowanie obrabiarek CNC Nr 2 Obróbka z wykorzystaniem kompensacji promienia narzędzia Opracował: Dr inż. Wojciech Ptaszyński Poznań, 2016-12-02
1 Politechnika Poznańska Instytut Technologii Mechanicznej Programowanie obrabiarek CNC Nr 2 Obróbka z wykorzystaniem kompensacji promienia narzędzia Opracował: Dr inż. Wojciech Ptaszyński Poznań, 2016-12-02
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 015/016 Kierunek studiów: Inżynieria Produkcji Forma
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 015/016 Kierunek studiów: Inżynieria Produkcji Forma
LABORATORIUM. Temat 11: Dokładność ustalania przesuwnych zespołów maszyn
 LABORATORIUM Temat 11: Dokładność ustalania przesuwnych zespołów maszyn 1. Wprowadzenie Szybki wzrost liczby maszyn sterowanych numerycznie oraz robotów przemysłowych zmusił producentów i uŝytkowników
LABORATORIUM Temat 11: Dokładność ustalania przesuwnych zespołów maszyn 1. Wprowadzenie Szybki wzrost liczby maszyn sterowanych numerycznie oraz robotów przemysłowych zmusił producentów i uŝytkowników
POSTĘPY W KONSTRUKCJI I STEROWANIU Bydgoszcz 2004
 POSTĘPY W KONSTRUKCJI I STEROWANIU Bydgoszcz 2004 METODA SYMULACJI CAM WIERCENIA OTWORÓW W TARCZY ROZDRABNIACZA WIELOTARCZOWEGO Józef Flizikowski, Kazimierz Peszyński, Wojciech Bieniaszewski, Adam Budzyński
POSTĘPY W KONSTRUKCJI I STEROWANIU Bydgoszcz 2004 METODA SYMULACJI CAM WIERCENIA OTWORÓW W TARCZY ROZDRABNIACZA WIELOTARCZOWEGO Józef Flizikowski, Kazimierz Peszyński, Wojciech Bieniaszewski, Adam Budzyński
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
RAPORT Etap 1. Poznanie mechanizmów trybologicznych procesu HPC
 RAPORT Etap 1 Poznanie mechanizmów trybologicznych procesu HPC Badania procesów wysokowydajnej obróbki powierzchni złożonych części z materiałów trudnoobrabialnych Nr WND-EPPK.01.03.00-18-017/13 1. Stanowisko
RAPORT Etap 1 Poznanie mechanizmów trybologicznych procesu HPC Badania procesów wysokowydajnej obróbki powierzchni złożonych części z materiałów trudnoobrabialnych Nr WND-EPPK.01.03.00-18-017/13 1. Stanowisko
Nowa metoda pomiarów parametrów konstrukcyjnych hełmów ochronnych z wykorzystaniem skanera 3D
 Nowa metoda pomiarów parametrów konstrukcyjnych hełmów ochronnych z wykorzystaniem skanera 3D dr inż. Marcin Jachowicz, CIOP-PIB 2016 r. Na wielu stanowiskach pracy, na których występuje ryzyko urazu głowy
Nowa metoda pomiarów parametrów konstrukcyjnych hełmów ochronnych z wykorzystaniem skanera 3D dr inż. Marcin Jachowicz, CIOP-PIB 2016 r. Na wielu stanowiskach pracy, na których występuje ryzyko urazu głowy
BADANIA EKSPERYMENTALNE I SYMULACYJNE WĘŻYKOWANIA PRZEGUBOWYCH POJAZDÓW PRZEMYSŁOWYCH NA PODWOZIU KOŁOWYM. Piotr Dudziński, Aleksander Skurjat 1
 BADANIA EKSPERYMENTALNE I SYMULACYJNE WĘŻYKOWANIA PRZEGUBOWYCH POJAZDÓW PRZEMYSŁOWYCH NA PODWOZIU KOŁOWYM Część 2. Badania symulacyjne Piotr Dudziński, Aleksander Skurjat 1 1 Prof. dr hab. inż. Piotr Dudziński,
BADANIA EKSPERYMENTALNE I SYMULACYJNE WĘŻYKOWANIA PRZEGUBOWYCH POJAZDÓW PRZEMYSŁOWYCH NA PODWOZIU KOŁOWYM Część 2. Badania symulacyjne Piotr Dudziński, Aleksander Skurjat 1 1 Prof. dr hab. inż. Piotr Dudziński,
Zastosowanie systemów CAD i RP w prototypowaniu przekładni dwudrożnej
 Grzegorz Budzik dr hab. inż., prof. PRz Bartłomiej Sobolewski mgr inż. Politechnika Rzeszowska, Katedra Konstrukcji Maszyn Zastosowanie systemów CAD i RP w prototypowaniu przekładni dwudrożnej Artykuł
Grzegorz Budzik dr hab. inż., prof. PRz Bartłomiej Sobolewski mgr inż. Politechnika Rzeszowska, Katedra Konstrukcji Maszyn Zastosowanie systemów CAD i RP w prototypowaniu przekładni dwudrożnej Artykuł
WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA
 WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA Ryszard WOJCIK 1, Norbert KEPCZAK 1 1. WPROWADZENIE Procesy symulacyjne pozwalają prześledzić zachowanie
WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA Ryszard WOJCIK 1, Norbert KEPCZAK 1 1. WPROWADZENIE Procesy symulacyjne pozwalają prześledzić zachowanie
Kurs: Programowanie i obsługa obrabiarek sterowanych numerycznie - CNC
 Kurs: Programowanie i obsługa obrabiarek sterowanych numerycznie - CNC Liczba godzin: 40; koszt 1200zł Liczba godzin: 80; koszt 1800zł Cel kursu: Nabycie umiejętności i kwalifikacji operatora obrabiarek
Kurs: Programowanie i obsługa obrabiarek sterowanych numerycznie - CNC Liczba godzin: 40; koszt 1200zł Liczba godzin: 80; koszt 1800zł Cel kursu: Nabycie umiejętności i kwalifikacji operatora obrabiarek
S Y L A B U S P R Z E D M I O T U. Systemy pomiarowe Measurement systems WMLAMCSI-SPom, WMLAMCNI-SPom
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Laboratorium metrologii
 Wydział Inżynierii Mechanicznej i Mechatroniki Instytut Technologii Mechanicznej Laboratorium metrologii Instrukcja do ćwiczeń laboratoryjnych Temat ćwiczenia: Pomiary wymiarów zewnętrznych Opracował:
Wydział Inżynierii Mechanicznej i Mechatroniki Instytut Technologii Mechanicznej Laboratorium metrologii Instrukcja do ćwiczeń laboratoryjnych Temat ćwiczenia: Pomiary wymiarów zewnętrznych Opracował:
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
APPLICATIONS OF SELECTED CAx TOOLS FOR INVESTIGATIONS OF ULTRASONIC ASSISTED GRINDING
 dr hab. inż. Janusz Porzycki, prof. PRz, e-mail: jpor@prz.edu.pl mgr inż. Roman Wdowik, e-mail: rwdowik@prz.edu.pl mgr inż. Marek Krok, e-mail: mkrok@prz.edu.pl Politechnika Rzeszowska im. I. Łukasiewicza
dr hab. inż. Janusz Porzycki, prof. PRz, e-mail: jpor@prz.edu.pl mgr inż. Roman Wdowik, e-mail: rwdowik@prz.edu.pl mgr inż. Marek Krok, e-mail: mkrok@prz.edu.pl Politechnika Rzeszowska im. I. Łukasiewicza
Współrzędnościowa technika pomiarowa wpływ interpretacji tolerancji wymiarowych na dobraną strategię pomiarową i uzyskany wynik.
 TEMAT: Współrzędnościowa technika pomiarowa wpływ interpretacji tolerancji wymiarowych na dobraną strategię pomiarową i uzyskany wynik. CEL PRACY: Celem pracy jest przeprowadzenie analizy wpływu różnorodnych
TEMAT: Współrzędnościowa technika pomiarowa wpływ interpretacji tolerancji wymiarowych na dobraną strategię pomiarową i uzyskany wynik. CEL PRACY: Celem pracy jest przeprowadzenie analizy wpływu różnorodnych
NUMERYCZNO-DOŚWIADCZALNA ANALIZA DRGAŃ WYSIĘGNICY KOPARKI WIELOCZERPAKOWEJ KOŁOWEJ
 Górnictwo i Geoinżynieria Rok 31 Zeszyt 2 2007 Jerzy Czmochowski* NUMERYCZNO-DOŚWIADCZALNA ANALIZA DRGAŃ WYSIĘGNICY KOPARKI WIELOCZERPAKOWEJ KOŁOWEJ 1. Wprowadzenie Przedmiotem analiz jest koparka wieloczerpakowa
Górnictwo i Geoinżynieria Rok 31 Zeszyt 2 2007 Jerzy Czmochowski* NUMERYCZNO-DOŚWIADCZALNA ANALIZA DRGAŃ WYSIĘGNICY KOPARKI WIELOCZERPAKOWEJ KOŁOWEJ 1. Wprowadzenie Przedmiotem analiz jest koparka wieloczerpakowa
Mechanika i budowa maszyn Studia drugiego stopnia. [Współrzędnościowa technika pomiarowa] Rodzaj przedmiotu: [Język polski/j
![Mechanika i budowa maszyn Studia drugiego stopnia. [Współrzędnościowa technika pomiarowa] Rodzaj przedmiotu: [Język polski/j](/thumbs/71/65284772.jpg "Mechanika i budowa maszyn Studia drugiego stopnia. [Współrzędnościowa technika pomiarowa] Rodzaj przedmiotu: [Język polski/j") Mechanika i budowa maszyn Studia drugiego stopnia Przedmiot: [Współrzędnościowa technika pomiarowa] Rodzaj przedmiotu: [obowiązkowy] Kod przedmiotu: MBM 2 S 3 2 25-0_1 Rok: I Semestr: 2 Forma studiów:
Mechanika i budowa maszyn Studia drugiego stopnia Przedmiot: [Współrzędnościowa technika pomiarowa] Rodzaj przedmiotu: [obowiązkowy] Kod przedmiotu: MBM 2 S 3 2 25-0_1 Rok: I Semestr: 2 Forma studiów:
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Badania doświadczalne urządzeń mechatronicznych. dr inż. Michał Dolata
 Badania doświadczalne urządzeń mechatronicznych 2019 dr inż. Michał Dolata www.mdolata.zut.edu.pl Badania doświadczalne 2 urządzeń mechatronicznych Prowadzący: dr inż. Michał Dolata Pok. 140 Konsultacje:
Badania doświadczalne urządzeń mechatronicznych 2019 dr inż. Michał Dolata www.mdolata.zut.edu.pl Badania doświadczalne 2 urządzeń mechatronicznych Prowadzący: dr inż. Michał Dolata Pok. 140 Konsultacje:
Ćwiczenie: "Mierniki cyfrowe"
 Ćwiczenie: "Mierniki cyfrowe" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Próbkowanie
Ćwiczenie: "Mierniki cyfrowe" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Próbkowanie
PLPILA02-IPMIBM-I-5s3-2012MKwPM-S
 Załącznik nr 1 do PROCEDURY 1.11. WYKONANIE YLABUU DO PRZEDMIOTU UJĘTEGO W PROGRAMIE KZTAŁCENIA w Państwowej Wyższej zkole Zawodowej im. tanisława taszica w Pile Kod przedmiotu: 1. INFORMACJE O PRZEDMIOCIE
Załącznik nr 1 do PROCEDURY 1.11. WYKONANIE YLABUU DO PRZEDMIOTU UJĘTEGO W PROGRAMIE KZTAŁCENIA w Państwowej Wyższej zkole Zawodowej im. tanisława taszica w Pile Kod przedmiotu: 1. INFORMACJE O PRZEDMIOCIE
Budowa, programowanie i eksploatacja obrabiarek CNC - opis przedmiotu
 Budowa, programowanie i eksploatacja obrabiarek CNC - opis przedmiotu Informacje ogólne Nazwa przedmiotu Budowa, programowanie i eksploatacja obrabiarek CNC Kod przedmiotu 06.1-WM-MiBM-EM-P-01_15 Wydział
Budowa, programowanie i eksploatacja obrabiarek CNC - opis przedmiotu Informacje ogólne Nazwa przedmiotu Budowa, programowanie i eksploatacja obrabiarek CNC Kod przedmiotu 06.1-WM-MiBM-EM-P-01_15 Wydział