Jak kształt płetwy ogonowej wpływa na siłę ciągu pojazdu podwodnego z napędem falowym
|
|
|
- Feliks Dudek
- 6 lat temu
- Przeglądów:
Transkrypt
1 MALEC Marcin 1 MORAWSKI Marcin 2 Jak kształt płetwy ogonowej wpływa na siłę ciągu pojazdu podwodnego z napędem falowym WSTĘP W obliczu światowego kryzysu finansowego oraz ograniczonych zasobów nieodnawialnych źródeł energii w postaci ropy naftowej, gazu ziemnego, węgla kamiennego, ludzkość codziennie stoi przed licznymi wyzwaniami mającymi na celu ograniczenia zużycia energii w każdej gałęzi przemysłu, transportu i dziedzinie życia codziennego. W dobie swobodnego handlu międzynarodowego i wciąż rosnącej międzykontynentalnej wymiany towarowej, istotną sprawą staje się zminimalizowanie kosztów transportu. Na dzień dzisiejszy rozróżniamy cztery główne warianty transportu: transport drogowy, kolejowy, lotniczy i wodny. Z punktu widzenia historycznego to ten ostatni odegrał najistotniejsze znaczenie w rozwoju cywilizacji. Już w starożytności umożliwiał transport towarów i migracji ludzkości. Również dziś żegluga morska i śródlądowa jest istotnym elementem gospodarki światowej. Transport wodny jest doskonałym środkiem lokomocji z punktu widzenia niskich kosztów usług logistycznych przypadających na jednostkę przewożonego ładunku w porównaniu do innych środków transportu. W związku z powyższym uzasadnione jest dążenie do udoskonalenia systemów napędowych jednostek pływających. Systemy napędowe jednostek pływających przedstawiają szerokie spektrum począwszy od pędników mięśniowych czyli klasycznych wioseł, przez pędniki wiatrowe czyli żagle a skończywszy na pędnikach mechanicznych czyli kołach łopatkowych, wszelkiego rodzaju śrubach napędowych i pędnikach strumieniowych. Do tego licznego zbioru coraz częściej obecnie dołączają pędniki biomimetyczne, czyli takie, które w swojej zasadzie działania wykorzystują analogie do organizmów wodnych. Napędy te w większości bazują na ruchu oscylacyjnym lub falowym elementów wykonawczych (korpusu, płetw). Rozróżnić należy tutaj dwie grupy: napędy typu MPF (median and/or pair fin propulsion), w których siła napędowa jest skutkiem pracy mechanizmów odwzorowujących ruch płetw bocznych ryb oraz napędu BCF (body and caudal fin propulsion) naśladującego ruch falowy korpusu i płetwy ogonowej. Drugi sposób stanowi obecnie najprężniej rozwijający się napęd niekonwencjonalny. Taki stan rzeczy jest spowodowany pojawieniem się nowych materiałów takich jak: stopy z pamięcią kształtu [7], materiały piezoelektryczne [3], materiały polimerowe odkształcające się pod wpływem pola elektrycznego [6] itp. wykazujących właściwości użyteczne z punktu widzenia napędu biomimetycznego czyli możliwość generowania oscylacji lub falowania płetw z jednoczesną dokładną kontrolą tego ruchu. Innym rozwiązaniem znacznie częściej spotykanym w literaturze jest odpowiednie zaprojektowanie korpusu pojazdu i wykorzystanie sztywnych elementów mechanizmu napędzanych klasycznymi serwomechanizmami elektrycznymi umieszczonymi wewnątrz poszczególnych segmentów. Coraz większa miniaturyzacja zarówno napędów jak i układów elektronicznych jak również rozwój systemów mikroprocesorowych i czujników typu MEMS umożliwia opracowanie tego typu napędu stosunkowo wiernie odwzorowującego kształt i kinematykę ryby. Przykładem takiego pojazdu jest opisywana w niniejszym artykule CyberRyba. Istotą napędu opisywanego pojazdu podwodnego jest ruch falowy sekcji ogonowej wykonanej w postaci trzech sztywnych segmentów połączonych szeregowo obrotowymi parami kinematycznymi napędzanymi serwomechanizmami. Ostatni segment jest zakończony elastyczną płetwą. Właściwa synchronizacja ruchów serwomechanizmów skutkuje falowaniem całego ogona. Pojazd dodatkowo posiada ruchome 1 Politechnika Krakowska im. Tadeusza Kościuszki, Wydział Mechaniczny, Kraków, Al. Jana Pawła II 37, Tel: , Fax: , mmalec@mech.pk.edu.pl 2 Politechnika Krakowska im. Tadeusza Kościuszki, Wydział Mechaniczny, Kraków, Al. Jana Pawła II 37, Tel: , Fax: , morawski@mech.pk.edu.pl 4112
2 płetwy boczne, które służą jako ster głębokości ale także posiadają możliwość ruchu oscylacyjnego dzięki czemu generują dodatkową siłę ciągu. CyberRyba posiada także zbiornik balastowy o sterowanym wypełnieniu umożliwiający zmianę wyporności. Szczegóły konstrukcyjne oraz opis matematyczny kinematyki napędu głównego zostały przedstawione we wcześniejszych opracowaniach [4][5], w których opublikowano także wyniki badań wpływu parametrów sterowania na prędkość i siłę ciągu pojazdu. Natomiast w niniejszym artykule autorzy prezentują wyniki badań wpływu parametrów konstrukcyjnych płetwy ogonowej na siłę ciągu CyberRyby dla kilku wybranych arbitralnie nastaw układu sterowania. Celem prowadzonych działań jest udoskonalenie napędu falowego w którym upatruje się realną konkurencję dla klasycznych systemów pędnikowych z uwagi na ich potencjalną większą sprawność. 1. PRZYGOTOWANIE EKSPERYMENTU Przedstawione badania są kontynuacją wieloletnich prac nad polskim pojazdem podwodnym naśladującym wygląd i sposób poruszania ryb. Opisywane badania są rozszerzeniem zrealizowanych wcześniej testów przedstawionych w pracy [5], dla płetw ogonowych wykonanych z jednego rodzaju materiału (gumy o grubości 3mm) lecz zmiennym kształcie, długości i szerokości dla wybranych nastaw układu sterowania. Rysunek 1 przedstawia wymiary charakterystyczne płetwy ogonowej osiowo-symetrycznej natomiast w tabeli 1 zebrano numery poszczególnych płetw i ich wymiary. Rys. 1 Kształt i wymiary płetwy ogonowej Tab. 1 Numery płetw ogonowych L[mm] h[mm] Stanowisko badawcze w postaci stalowej ramy z przymocowanym nad powierzchnią wody tensometrycznym czujnikiem siły zanurzono w basenie o wymiarach 4m x 2m x 1m. Do ustawionego pionowo czujnika przymocowano cienką nierozciągliwą linkę, która połączono poprzez rolkę z zanurzonym w wodzie pojazdem, uzyskując w ten sposób zmianę kierunku działania siły z poziomego na pionowy (nie uwzględniono oporu rolki prowadzącej linkę jako znikomo małego). Czujnik siły typu AST KAP-S [2] o zakresie 10[N] i rozdzielczości 0,001[N] podłączono do portu USB komputera za pośrednictwem przetwornika pomiarowego typu AST BA 643 [1] uzyskując w ten sposób możliwość rejestracji próbek z częstotliwością 400[Hz]. Przed rozpoczęciem pomiarów czujnik wytarowano dzięki czemu wyeliminowano siłę ciężkości działającą na elementy czujnika. Pomiary wykonano przy sześciu nastawach parametrów sterowania dla każdej płetwy uzyskując tym samym 42 próby. Nastawy parametrów sterowania dotyczyły trzech wartości częstotliwości falowania f[hz] oraz dwóch wartości bezwymiarowego parametru R określającego procentowy udział długości ogona CyberRyby w długości generowanej fali. Parametr R bezpośrednio decyduje o amplitudzie wychyleń poszczególnych sekcji ogona. Szczegółowy opis dotyczący sterowania pojazdu zawiera publikacja [4]. Każdorazowy pomiar obejmował rejestrację siły ciągu pojazdu w czasie minimum 20 sekund ruchu. Na podstawie zarejestrowanych danych w czasie od 5-tej do 20-tej sekundy ruchu obliczono wartość średnią siły oraz odchylenie standardowe, które przedstawia stabilność generowanej siły ciągu. Fotografia 2 przedstawia CyberRybę na stanowisku badawczym. 4113

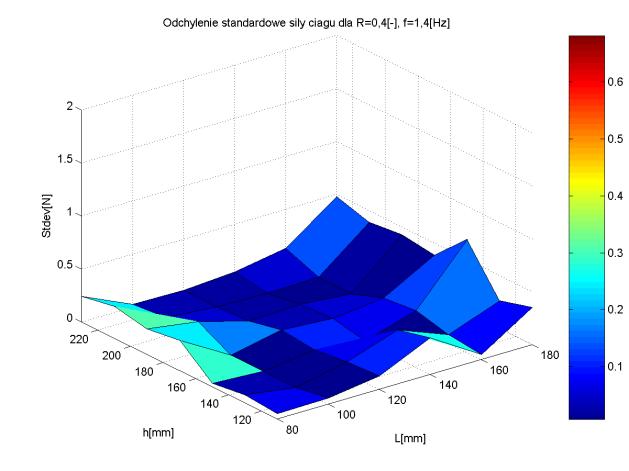
3 Fot. 2 Widok stanowiska badawczego 2. WYNIKI EKSPERYMENTU Dla zadanych parametrów sterowania i różnych płetw ogonowych otrzymano przebiegi siły charakteryzujące się różnym rozrzutem wartości siły wokół wartości średniej. Dla niektórych płetw przy konkretnych wartościach sterowania charakter siły ciągu odznaczał się stosunkowo małymi oscylacjami niż dla innych. Na rysunku 3a przedstawiono przebieg siły ciągu dla płetwy nr 29 odznaczający się małymi oscylacjami, podczas gdy dla płetwy nr 41 oscylacje siły ciągu są znaczne co można zaobserwować na rysunku 3b. a) b) Rys. 3 Przebiegi siły ciągu dla różnych płetw i różnych nastaw układu sterowania a) pomiar nr 29 (płetwa L=160[mm], h=230 [mm]), f=1,4[hz], R=0,6, b) pomiar nr 41 (płetwa L=180[mm], h=130[mm]), f=1,4[hz], R=0,6, Wyniki średniej siły ciągu oraz odchyleń standardowych dla każdej płetwy przedstawiono w sposób graficzny na rysunku 4 przy pomocy wykresów powierzchniowych. 4114
 e) f)")
4 a) b) c) d) e) f) 4115
5 g) h) i) j) k) l) Rys. 4 Wykresy średniej siły ciągu oraz odchylenia standardowego dla sześciu nastaw parametrów sterowania a), b) odpowiednio średnia siła ciągu i odchylenie standardowe dla R=0,4, f=0,6[hz], c), d) odpowiednio średnia siła ciągu i odchylenie standardowe dla R=0,4, f=1,0[hz], e), f) odpowiednio średnia siła ciągu i odchylenie standardowe dla R=0,4, f=1,4[hz], g) h) odpowiednio średnia siła ciągu i odchylenie standardowe dla R=0,6, f=0,6[hz], i), j) odpowiednio średnia siła ciągu i odchylenie standardowe dla R=0,6, f=1,0[hz], k), l) odpowiednio średnia siła ciągu i odchylenie standardowe dla R=0,6, f=1,4[hz] Maksymalną średnią wartość siły ciągu dla R=0,4 równą 1,684[N] osiągnięto dla płetwy nr 15 o wymiarach L=120[mm], h=230[mm] przy częstotliwości falowania ogona f=1,6[hz]. Natomiast dla R=0,6 maksymalną średnią wartość siły ciągu równą 2,270[N] osiągnięto dla płetwy nr
6 o wymiarach L=100[mm], h=130[mm] przy częstotliwości falowania ogona f=1,6[hz]. Przy małych wartościach parametru R (0,4) oraz małych częstotliwościach falowania (f=0,6[hz]) wpływ kształtu i wymiarów płetwy na siłę ciągu jest niewielki. Generowana siła nie przekracza 0,319[N]. Podobnie dla R=0,6 i f=0,6[hz] generowana siła nie przekracza 0,638[N]. W obu przypadkach odchylenie standardowe dla wszystkich płetw jest niewielkie. Przy małych wartościach parametru R (0,4) i średnich częstotliwościach falowania (f=1,0[hz]) wpływ kształtu i wymiarów płetwy na siłę ciągu jest już zauważalny. Dla tych nastaw sterowania im dłuższa płetwa tym większa siła ciągu lecz również większe odchylenia standardowe (większe oscylacje generowanej siły wokół wartości średniej). Dla małej wartości R (0,4) i dużej częstotliwości falowania można zaobserwować największy wpływ kształtu i wymiarów na siłę ciągu oraz jej stabilność. Przy maksymalnej generowanej dla tego zakresu sile (1,684[N]) odchylenie standardowe jest niewielkie (0,018[N]). Płetwy bardzo długie lub bardzo krótkie powodują wzrost odchylenia standardowego. Przy częstotliwość f=1,4[hz] i R=0,6 charakter średniej siły ciągu w funkcji wymiarów płetwy ogonowej jest podobny. W tym przypadku płetwa o pośredniej długości (100[mm]) generuje maksymalną siłę 2,270[N] przy odchyleniu standardowym na poziomie 0,044[N]. W tym przypadku także płetwy bardzo długie lub bardzo krótkie powodują wzrost odchylenia standardowego. WNIOSKI Z przedstawionych wyników pomiarów można wywnioskować fakt, że wysokość płetwy ogonowej w mniejszym stopniu wpływa na wartość generowanej siły ciągu niż jej długość przy spokojnym ruchu ogona inaczej niż przy bardziej dynamicznym ruchu napędu pojazdu podwodnego gdzie płetwa o średniej długości ale dużej wysokości generuje największą siłę. Wzrost długości płetwy ogonowej powyżej 120[mm] nie przekłada się na wzrost siły ciągu co może być spowodowane jej dużą podatnością. Zasadniczo wpływ kształtu i wymiarów płetwy na średnią siłę ciągu uwidacznia się przy większych wartościach parametru R (0,6) oraz przy dużych częstotliwościach falowania (f=1,6[hz]). Dla płetw o średniej długości (od 100[mm] do 120[mm]) oscylacje siły ciągu są małe. Opisane badania utwierdzają autorów w przekonaniu, że prawidłowy dobór płetwy ogonowej biomimetycznego pojazdu podwodnego z napędem falowym typu BCF jest istotny z punktu widzenia generowanej siły ciągu a tym samym sprawności napędu falowego. Nie można jednak rozpatrywać parametrów konstrukcyjnych samej płetwy w oderwaniu od parametrów sterowania, gdyż pozostają one w ścisłej korelacji. Kolejne prace badawcze będą miały na celu zbadanie wpływu kształtu i wymiarów płetw bocznych CyberRyby oscylujących z różnymi wartościami amplitudy i częstotliwości na siłę ciągu tego typu pojazdu. Streszczenie W niniejszym artykule autorzy zaprezentowali niekonwencjonalną konstrukcję pojazdu podwodnego wykorzystującego tak zwany napęd falowy naśladujący kinematykę ryb z rodziny karpiowatych. Biomimetyczny system napędowy pojazdu stanowi mechaniczną reprezentację rybiego ogona i zbudowany jest w postaci trzysegmentowej sekcji ogonowej zakończonej elastyczną płetwą. Konstrukcja robota odwzorowuje karpia. Sekcja ogonowa wraz z systemem płetw bocznych i sztucznym pęcherzem pławnym umożliwia wierne naśladowanie ruchu ryby. W ramach rozwoju koncepcji biomimetycznego pojazdu podwodnego, prowadzone są intensywne badania mające na celu zwiększenie efektywności zaproponowanego systemu napędowego. W niniejszej pracy przedstawiono kolejny etap badań mający na celu wskazanie poprawnego kształtu i wielkości powierzchni płetwy ogonowej z punktu widzenia maksymalnej siły ciągu generowanej przez system napędowy pojazdu podwodnego z napędem falowym CyberRyba w wersji 5. W ramach badań dokonano pomiaru siły ciągu dla kilkunastu wariantów kształtu płetwy ogonowej wykonanej z elastycznego materiału dla uprzednio zdefiniowanych parametrów sterowania. Dokonano analizy i opracowania wyników pomiarów, przedstawiono wnioski oraz wyznaczono kierunki dalszych prac. 4117
7 How the shape of the caudal fin affects the thrust of underwater vehicle with undulating propulsion Abstract In this article the authors present an unconventional design of an underwater vehicle with the so-called undulating propulsion which mimics the kinematics of a carp fish. Biomimetic vehicle propulsion system is the mechanical representation of a fish-tail and it is built as a three-segment linkage with elastic fin attached to the end of the last segment. Undulating tail section with oscillating lateral fins and the artificial swim baldder allows the vehicle for accurate imitation of movement of a real fish. As part of the development of the concept of biomimetic underwater vehicle, an intense research aimed at increasing the effectiveness of the proposed drive system are being carried out. In this paper, authors describe the next stage of the research aimed to identify the correct shape and dimensions of the tail fin from the point of view of maximum thrust generated by the propulsion system of the underwater vehicle with undulating propulsion called CyberFish version 5. During the experiment the thrust for several variants of the shape of the flexible tail fin was measured with predefined vehicle s control parameters. The measurement results was then elaborated and analyzed. Finally the conclusions was drawn, and the directions for further work was set. BIBLIOGRAFIA 1. Karta katalogowa, E_AE_BA643.pdf, dostęp luty 2014, 2. Karta katalogowa, E_KMT_KAP-S.pdf, dostęp luty 2014, 3. Nguyen, Q. S., i inni, A Fish Robot Driven by Piezoceramic Actuators and a Miniaturized Power Supply, International Journal of Control, Automation, and Systems, 2009, s , 4. Malec M., Morawski M., Szymak P., Trzmiel A., Analysis of Parameters of Traveling Wave Impact on the Speed of Biomimetic Underwater Vehicle, Solid State Phenomena, vol.210 (2014), pp , 5. Malec M., Morawski M., Wpływ parametrów sterowania na siłę ciągu podwodnego robota mobilnego z napędem falowym dla różnych wariantów płetwy ogonowej, Elektronika, konstrukcje, technologie, zastosowania, nr 12/2013, s , 6. Tan X., i inni, An Autonomous Robotic Fish for mobile Sensing, Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and System, 2006, Chiny, 7. Wang Z., Guanrong H., Jian L., Yangwei W., Kai X., A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin, Sensors and Actuators A: Physical, 2008, s , 4118
POMIAR PARAMETRÓW RUCHU POJAZDU PODWOD- NEGO Z NAPĘDEM FALOWYM Z WYKORZYSTANIEM INERCYJNEGO CZUJNIKA POŁOŻENIA
 M a r c i n M a l e c 1, M a r c i n M o r a w s k i 2, P i o t r S z y m a k 3, 1 P o l i t e c h n i k a K r a k o w s k a, J a n a P a w ł a I I 3 7, 31-8 6 4 K r a ków 2 P o l i t e c h n i k a K r
M a r c i n M a l e c 1, M a r c i n M o r a w s k i 2, P i o t r S z y m a k 3, 1 P o l i t e c h n i k a K r a k o w s k a, J a n a P a w ł a I I 3 7, 31-8 6 4 K r a ków 2 P o l i t e c h n i k a K r
Koncepcja ślimakowego mechanizmu napędowego płetw bocznych podwodnego robota mobilnego
 MALEC Marcin 1 Koncepcja ślimakowego mechanizmu napędowego płetw bocznych podwodnego robota mobilnego WSTĘP Na przestrzeni kilku ostatnich lat obserwujemy gwałtowny rozwój konstrukcji inspirowanych naturą,
MALEC Marcin 1 Koncepcja ślimakowego mechanizmu napędowego płetw bocznych podwodnego robota mobilnego WSTĘP Na przestrzeni kilku ostatnich lat obserwujemy gwałtowny rozwój konstrukcji inspirowanych naturą,
PL B1. Mechanizm pedipulatora do ustawiania pozycji modułu napędowego, zwłaszcza robota mobilnego
 PL 223875 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223875 (13) B1 (21) Numer zgłoszenia: 406656 (51) Int.Cl. F16H 1/36 (2006.01) F16H 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223875 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223875 (13) B1 (21) Numer zgłoszenia: 406656 (51) Int.Cl. F16H 1/36 (2006.01) F16H 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
RYBY-ROBOTY POLSKĄ SPECJALNOŚCIĄ
 aut. Maksymilian Dura 15.10.2018 RYBY-ROBOTY POLSKĄ SPECJALNOŚCIĄ Jednym z najbardziej oryginalnych rozwiązań tegorocznego Międzynarodowego Salonu Przemysłu Obronnego w Kielcach były prezentowane przez
aut. Maksymilian Dura 15.10.2018 RYBY-ROBOTY POLSKĄ SPECJALNOŚCIĄ Jednym z najbardziej oryginalnych rozwiązań tegorocznego Międzynarodowego Salonu Przemysłu Obronnego w Kielcach były prezentowane przez
OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG
 Leon KUKIEŁKA, Krzysztof KUKIEŁKA, Katarzyna GELETA, Łukasz CĄKAŁA OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG Streszczenie Praca dotyczy optymalizacji kształtu zbiornika toroidalnego na gaz LPG. Kryterium
Leon KUKIEŁKA, Krzysztof KUKIEŁKA, Katarzyna GELETA, Łukasz CĄKAŁA OPTYMALIZACJA ZBIORNIKA NA GAZ PŁYNNY LPG Streszczenie Praca dotyczy optymalizacji kształtu zbiornika toroidalnego na gaz LPG. Kryterium
ĆWICZENIE NR.6. Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych
 ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
KAMIKA Instruments PUBLIKACJE. TYTUŁ Pomiar kształtu i uziarnienia mikrosfer. AUTORZY Stanisław Kamiński, Dorota Kamińska, KAMIKA Instruments
 KAMIKA Instruments PUBLIKACJE TYTUŁ Pomiar kształtu i uziarnienia mikrosfer. AUTORZY Stanisław Kamiński, Dorota Kamińska, KAMIKA Instruments DZIEDZINA Pomiar kształtu cząstek PRZYRZĄD 2DiSA SŁOWA KLUCZOWE
KAMIKA Instruments PUBLIKACJE TYTUŁ Pomiar kształtu i uziarnienia mikrosfer. AUTORZY Stanisław Kamiński, Dorota Kamińska, KAMIKA Instruments DZIEDZINA Pomiar kształtu cząstek PRZYRZĄD 2DiSA SŁOWA KLUCZOWE
Use of the ball-bar measuring system to investigate the properties of parallel kinematics mechanism
 Artykuł Autorski z VIII Forum Inżynierskiego ProCAx, Siewierz, 19-22 XI 2009 (MECHANIK nr 2/2010) Dr inż. Krzysztof Chrapek, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, mgr inż. Paweł Maślak Politechnika
Artykuł Autorski z VIII Forum Inżynierskiego ProCAx, Siewierz, 19-22 XI 2009 (MECHANIK nr 2/2010) Dr inż. Krzysztof Chrapek, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, mgr inż. Paweł Maślak Politechnika
Laboratorium LAB1. Moduł małej energetyki wiatrowej
 Laboratorium LAB1 Moduł małej energetyki wiatrowej Badanie charakterystyki efektywności wiatraka - kompletnego systemu (wiatrak, generator, akumulator) prędkość wiatru - moc produkowana L1-U1 Pełne badania
Laboratorium LAB1 Moduł małej energetyki wiatrowej Badanie charakterystyki efektywności wiatraka - kompletnego systemu (wiatrak, generator, akumulator) prędkość wiatru - moc produkowana L1-U1 Pełne badania
WYBÓR PUNKTÓW POMIAROWYCH
 Scientific Bulletin of Che lm Section of Technical Sciences No. 1/2008 WYBÓR PUNKTÓW POMIAROWYCH WE WSPÓŁRZĘDNOŚCIOWEJ TECHNICE POMIAROWEJ MAREK MAGDZIAK Katedra Technik Wytwarzania i Automatyzacji, Politechnika
Scientific Bulletin of Che lm Section of Technical Sciences No. 1/2008 WYBÓR PUNKTÓW POMIAROWYCH WE WSPÓŁRZĘDNOŚCIOWEJ TECHNICE POMIAROWEJ MAREK MAGDZIAK Katedra Technik Wytwarzania i Automatyzacji, Politechnika
WYTWARZANIE MECHANIZMÓW METODĄ FDM
 Mgr inż. Bartosz BLICHARZ Mgr inż. Maciej CADER Przemysłowy Instytut Automatyki i Pomiarów PIAP Piotr HERMANOWICZ Politechnika Warszawska DOI: 10.17814/mechanik.2015.7.211 WYTWARZANIE MECHANIZMÓW METODĄ
Mgr inż. Bartosz BLICHARZ Mgr inż. Maciej CADER Przemysłowy Instytut Automatyki i Pomiarów PIAP Piotr HERMANOWICZ Politechnika Warszawska DOI: 10.17814/mechanik.2015.7.211 WYTWARZANIE MECHANIZMÓW METODĄ
WYKRYWANIE USZKODZEŃ W LITYCH ELEMENTACH ŁĄCZĄCYCH WAŁY
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LI NR 4 (183) 2010 Radosł aw Pakowski Mirosł aw Trzpil Politechnika Warszawska WYKRYWANIE USZKODZEŃ W LITYCH ELEMENTACH ŁĄCZĄCYCH WAŁY STRESZCZENIE W artykule
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LI NR 4 (183) 2010 Radosł aw Pakowski Mirosł aw Trzpil Politechnika Warszawska WYKRYWANIE USZKODZEŃ W LITYCH ELEMENTACH ŁĄCZĄCYCH WAŁY STRESZCZENIE W artykule
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
BADANIA PORÓWNAWCZE PAROPRZEPUSZCZALNOŚCI POWŁOK POLIMEROWYCH W RAMACH DOSTOSOWANIA METOD BADAŃ DO WYMAGAŃ NORM EN
 PRACE INSTYTUTU TECHNIKI BUDOWLANEJ - KWARTALNIK nr 1 (137) 2006 BUILDING RESEARCH INSTITUTE - QUARTERLY No 1 (137) 2006 ARTYKUŁY - REPORTS Anna Sochan*, Anna Sokalska** BADANIA PORÓWNAWCZE PAROPRZEPUSZCZALNOŚCI
PRACE INSTYTUTU TECHNIKI BUDOWLANEJ - KWARTALNIK nr 1 (137) 2006 BUILDING RESEARCH INSTITUTE - QUARTERLY No 1 (137) 2006 ARTYKUŁY - REPORTS Anna Sochan*, Anna Sokalska** BADANIA PORÓWNAWCZE PAROPRZEPUSZCZALNOŚCI
WÓJCIK Ryszard 1 KĘPCZAK Norbert 2
 WÓJCIK Ryszard 1 KĘPCZAK Norbert 2 Wykorzystanie symulacji komputerowych do określenia odkształceń otworów w korpusie przekładni walcowej wielostopniowej podczas procesu obróbki skrawaniem WSTĘP Właściwa
WÓJCIK Ryszard 1 KĘPCZAK Norbert 2 Wykorzystanie symulacji komputerowych do określenia odkształceń otworów w korpusie przekładni walcowej wielostopniowej podczas procesu obróbki skrawaniem WSTĘP Właściwa
ANALiZA WPŁYWU PARAMETRÓW SAMOLOTU NA POZiOM HAŁASU MiERZONEGO WEDŁUG PRZEPiSÓW FAR 36 APPENDiX G
 PRACE instytutu LOTNiCTWA 221, s. 115 120, Warszawa 2011 ANALiZA WPŁYWU PARAMETRÓW SAMOLOTU NA POZiOM HAŁASU MiERZONEGO WEDŁUG PRZEPiSÓW FAR 36 APPENDiX G i ROZDZiAŁU 10 ZAŁOżEń16 KONWENCJi icao PIotr
PRACE instytutu LOTNiCTWA 221, s. 115 120, Warszawa 2011 ANALiZA WPŁYWU PARAMETRÓW SAMOLOTU NA POZiOM HAŁASU MiERZONEGO WEDŁUG PRZEPiSÓW FAR 36 APPENDiX G i ROZDZiAŁU 10 ZAŁOżEń16 KONWENCJi icao PIotr
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr Eksperymentalne wyznaczenie charakteru oporów w przewodach hydraulicznych opory liniowe Opracowanie: Z.Kudżma, P. Osiński J. Rutański,
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr Eksperymentalne wyznaczenie charakteru oporów w przewodach hydraulicznych opory liniowe Opracowanie: Z.Kudżma, P. Osiński J. Rutański,
4. EKSPLOATACJA UKŁADU NAPĘD ZWROTNICOWY ROZJAZD. DEFINICJA SIŁ W UKŁADZIE Siła nastawcza Siła trzymania
 3 SPIS TREŚCI Przedmowa... 11 1. WPROWADZENIE... 13 1.1. Budowa rozjazdów kolejowych... 14 1.2. Napędy zwrotnicowe... 15 1.2.1. Napęd zwrotnicowy EEA-4... 18 1.2.2. Napęd zwrotnicowy EEA-5... 20 1.3. Współpraca
3 SPIS TREŚCI Przedmowa... 11 1. WPROWADZENIE... 13 1.1. Budowa rozjazdów kolejowych... 14 1.2. Napędy zwrotnicowe... 15 1.2.1. Napęd zwrotnicowy EEA-4... 18 1.2.2. Napęd zwrotnicowy EEA-5... 20 1.3. Współpraca
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO
 BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ
 Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2008 Seria: TRANSPORT z. 64 Nr kol. 1803 Rafał SROKA OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA Streszczenie. W
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2008 Seria: TRANSPORT z. 64 Nr kol. 1803 Rafał SROKA OKREŚLENIE WPŁYWU WYŁĄCZANIA CYLINDRÓW SILNIKA ZI NA ZMIANY SYGNAŁU WIBROAKUSTYCZNEGO SILNIKA Streszczenie. W
MATEMATYCZNY MODEL PĘTLI HISTEREZY MAGNETYCZNEJ
 ELEKTRYKA 014 Zeszyt 1 (9) Rok LX Krzysztof SZTYMELSKI, Marian PASKO Politechnika Śląska w Gliwicach MATEMATYCZNY MODEL PĘTLI ISTEREZY MAGNETYCZNEJ Streszczenie. W artykule został zaprezentowany matematyczny
ELEKTRYKA 014 Zeszyt 1 (9) Rok LX Krzysztof SZTYMELSKI, Marian PASKO Politechnika Śląska w Gliwicach MATEMATYCZNY MODEL PĘTLI ISTEREZY MAGNETYCZNEJ Streszczenie. W artykule został zaprezentowany matematyczny
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
WPŁYW ODKSZTAŁCENIA WZGLĘDNEGO NA WSKAŹNIK ZMNIEJSZENIA CHROPOWATOŚCI I STOPIEŃ UMOCNIENIA WARSTWY POWIERZCHNIOWEJ PO OBRÓBCE NAGNIATANEM
 Tomasz Dyl Akademia Morska w Gdyni WPŁYW ODKSZTAŁCENIA WZGLĘDNEGO NA WSKAŹNIK ZMNIEJSZENIA CHROPOWATOŚCI I STOPIEŃ UMOCNIENIA WARSTWY POWIERZCHNIOWEJ PO OBRÓBCE NAGNIATANEM W artykule określono wpływ odkształcenia
Tomasz Dyl Akademia Morska w Gdyni WPŁYW ODKSZTAŁCENIA WZGLĘDNEGO NA WSKAŹNIK ZMNIEJSZENIA CHROPOWATOŚCI I STOPIEŃ UMOCNIENIA WARSTWY POWIERZCHNIOWEJ PO OBRÓBCE NAGNIATANEM W artykule określono wpływ odkształcenia
Parametryzacja przetworników analogowocyfrowych
 Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
METODYKA BADAŃ MAŁYCH SIŁOWNI WIATROWYCH
 Inżynieria Rolnicza 2(100)/2008 METODYKA BADAŃ MAŁYCH SIŁOWNI WIATROWYCH Krzysztof Nalepa, Maciej Neugebauer, Piotr Sołowiej Katedra Elektrotechniki i Energetyki, Uniwersytet Warmińsko-Mazurski w Olsztynie
Inżynieria Rolnicza 2(100)/2008 METODYKA BADAŃ MAŁYCH SIŁOWNI WIATROWYCH Krzysztof Nalepa, Maciej Neugebauer, Piotr Sołowiej Katedra Elektrotechniki i Energetyki, Uniwersytet Warmińsko-Mazurski w Olsztynie
OPORY W RUCHU OSCYLACYJNYM MECHANIZMÓW MASZYN GÓRNICZYCH
 POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE NR 1669 SUB Gottingen 7 217 872 050 2005 A 12172 Aleksander KOWAL OPORY W RUCHU OSCYLACYJNYM MECHANIZMÓW MASZYN GÓRNICZYCH Gliwice 2005 SPIS TREŚCI WYKAZ OZNACZEŃ 7
POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE NR 1669 SUB Gottingen 7 217 872 050 2005 A 12172 Aleksander KOWAL OPORY W RUCHU OSCYLACYJNYM MECHANIZMÓW MASZYN GÓRNICZYCH Gliwice 2005 SPIS TREŚCI WYKAZ OZNACZEŃ 7
REJESTRACJA WARTOŚCI CHWILOWYCH NAPIĘĆ I PRĄDÓW W UKŁADACH ZASILANIA WYBRANYCH MIESZAREK ODLEWNICZYCH
 WYDZIAŁ ODLEWNICTWA AGH ODDZIAŁ KRAKOWSKI STOP XXXIII KONFERENCJA NAUKOWA z okazji Ogólnopolskiego Dnia Odlewnika 2009 Kraków, 11 grudnia 2009 r. Eugeniusz ZIÓŁKOWSKI, Roman WRONA, Krzysztof SMYKSY, Marcin
WYDZIAŁ ODLEWNICTWA AGH ODDZIAŁ KRAKOWSKI STOP XXXIII KONFERENCJA NAUKOWA z okazji Ogólnopolskiego Dnia Odlewnika 2009 Kraków, 11 grudnia 2009 r. Eugeniusz ZIÓŁKOWSKI, Roman WRONA, Krzysztof SMYKSY, Marcin
CO NOWEGO W NORMALIZACJI EUROPEJSKIEJ ZWIĄZANEJ Z AKUSTYKĄ BUDOWLANĄ
 PRACE INSTYTUTU TECHNIKI BUDOWLANEJ - KWARTALNIK nr 1 (157) 2011 BUILDING RESEARCH INSTITUTE - QUARTERLY No 1 (157) 2011 Anna lżewska* CO NOWEGO W NORMALIZACJI EUROPEJSKIEJ ZWIĄZANEJ Z AKUSTYKĄ BUDOWLANĄ
PRACE INSTYTUTU TECHNIKI BUDOWLANEJ - KWARTALNIK nr 1 (157) 2011 BUILDING RESEARCH INSTITUTE - QUARTERLY No 1 (157) 2011 Anna lżewska* CO NOWEGO W NORMALIZACJI EUROPEJSKIEJ ZWIĄZANEJ Z AKUSTYKĄ BUDOWLANĄ
WPŁYW SZYBKOŚCI STYGNIĘCIA NA WŁASNOŚCI TERMOFIZYCZNE STALIWA W STANIE STAŁYM
 2/1 Archives of Foundry, Year 200, Volume, 1 Archiwum Odlewnictwa, Rok 200, Rocznik, Nr 1 PAN Katowice PL ISSN 1642-308 WPŁYW SZYBKOŚCI STYGNIĘCIA NA WŁASNOŚCI TERMOFIZYCZNE STALIWA W STANIE STAŁYM D.
2/1 Archives of Foundry, Year 200, Volume, 1 Archiwum Odlewnictwa, Rok 200, Rocznik, Nr 1 PAN Katowice PL ISSN 1642-308 WPŁYW SZYBKOŚCI STYGNIĘCIA NA WŁASNOŚCI TERMOFIZYCZNE STALIWA W STANIE STAŁYM D.
Układ aktywnej redukcji hałasu przenikającego przez przegrodę w postaci płyty mosiężnej
 Układ aktywnej redukcji hałasu przenikającego przez przegrodę w postaci płyty mosiężnej Paweł GÓRSKI 1), Emil KOZŁOWSKI 1), Gracjan SZCZĘCH 2) 1) Centralny Instytut Ochrony Pracy Państwowy Instytut Badawczy
Układ aktywnej redukcji hałasu przenikającego przez przegrodę w postaci płyty mosiężnej Paweł GÓRSKI 1), Emil KOZŁOWSKI 1), Gracjan SZCZĘCH 2) 1) Centralny Instytut Ochrony Pracy Państwowy Instytut Badawczy
MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH CATIA I MATLAB MODEL OF SERIAL MANIPULATOR IN CATIA AND MATLAB
 Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE
 AKADEMII MORSKIEJ W SZCZECINIE") ISSN 0209-2069 ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE EXPLO-SHIP 2004 Tadeusz Szelangiewicz, Katarzyna Żelazny Prognozowanie charakterystyk napędowych statku ze śrubą stałą podczas pływania
ISSN 0209-2069 ZESZYTY NAUKOWE NR 1(73) AKADEMII MORSKIEJ W SZCZECINIE EXPLO-SHIP 2004 Tadeusz Szelangiewicz, Katarzyna Żelazny Prognozowanie charakterystyk napędowych statku ze śrubą stałą podczas pływania
BADANIE CHARAKTERYSTYK DYNAMICZNYCH DLA RÓŻNYCH KONFIGURACJI ROBOTA CHIRURGICZNEGO
 MODELOWANIE INŻYNIERSKIE ISNN 1896-771X 32, s. 281-286, Gliwice 2006 BADANIE CHARAKTERYSTYK DYNAMICZNYCH DLA RÓŻNYCH KONFIGURACJI ROBOTA CHIRURGICZNEGO MAREK KOŹLAK WOJCIECH KLEIN Katedra Mechaniki Stosowanej,
MODELOWANIE INŻYNIERSKIE ISNN 1896-771X 32, s. 281-286, Gliwice 2006 BADANIE CHARAKTERYSTYK DYNAMICZNYCH DLA RÓŻNYCH KONFIGURACJI ROBOTA CHIRURGICZNEGO MAREK KOŹLAK WOJCIECH KLEIN Katedra Mechaniki Stosowanej,
Wpływ promieniowania na wybrane właściwości folii biodegradowalnych
 WANDA NOWAK, HALINA PODSIADŁO Politechnika Warszawska Wpływ promieniowania na wybrane właściwości folii biodegradowalnych Słowa kluczowe: biodegradacja, kompostowanie, folie celulozowe, właściwości wytrzymałościowe,
WANDA NOWAK, HALINA PODSIADŁO Politechnika Warszawska Wpływ promieniowania na wybrane właściwości folii biodegradowalnych Słowa kluczowe: biodegradacja, kompostowanie, folie celulozowe, właściwości wytrzymałościowe,
Ćwiczenie: "Mierniki cyfrowe"
 Ćwiczenie: "Mierniki cyfrowe" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Próbkowanie
Ćwiczenie: "Mierniki cyfrowe" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Próbkowanie
ACR PH-1 Test Phantom
 MAGMEDIX IC. 160 AUTHORITY DRIVE FITCHBURG, MA 01420 USA STADARDOWY FATOM AKREDYTACYJY ACR DO SKAERÓW MRI ACR PH-1 Test Phantom Fantom akredytacyjny ACR do rezonansu magnetycznego (akredytacja ACR MRAP)
MAGMEDIX IC. 160 AUTHORITY DRIVE FITCHBURG, MA 01420 USA STADARDOWY FATOM AKREDYTACYJY ACR DO SKAERÓW MRI ACR PH-1 Test Phantom Fantom akredytacyjny ACR do rezonansu magnetycznego (akredytacja ACR MRAP)
PRZEMIENNIKI CZĘSTOTLIWOŚCI W DWUSIL- NIKOWYM NAPĘDZIE WAŁU TAŚMOCIĄGU PO- WIERZCHNIOWEGO
 PRZEMIENNIKI CZĘSTOTLIWOŚCI W DWUSIL- NIKOWYM NAPĘDZIE WAŁU TAŚMOCIĄGU PO- WIERZCHNIOWEGO BERNARD SZYMAŃSKI, JERZY SZYMAŃSKI Politechnika Warszawska, Politechnika Radomska szymansb@isep.pw.edu.pl, j.szymanski@pr.radom.pl
PRZEMIENNIKI CZĘSTOTLIWOŚCI W DWUSIL- NIKOWYM NAPĘDZIE WAŁU TAŚMOCIĄGU PO- WIERZCHNIOWEGO BERNARD SZYMAŃSKI, JERZY SZYMAŃSKI Politechnika Warszawska, Politechnika Radomska szymansb@isep.pw.edu.pl, j.szymanski@pr.radom.pl
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2014 Seria: TRANSPORT z. 82 Nr kol. 1903
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2014 Seria: TRANSPORT z. 82 Nr kol. 1903 Piotr FOLĘGA 1 DOBÓR ZĘBATYCH PRZEKŁADNI FALOWYCH Streszczenie. Różnorodność typów oraz rozmiarów obecnie produkowanych zębatych
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2014 Seria: TRANSPORT z. 82 Nr kol. 1903 Piotr FOLĘGA 1 DOBÓR ZĘBATYCH PRZEKŁADNI FALOWYCH Streszczenie. Różnorodność typów oraz rozmiarów obecnie produkowanych zębatych
GĄSIENICOWY UKŁAD JEZDNY
 Szybkobieżne Pojazdy Gąsienicowe (22) nr 1, 2007 Jerzy NAWROCKI GĄSIENICOWY UKŁAD JEZDNY Streszczenie: W artykule przedstawiono możliwoś ci szybkiego zamontowania na terenowych pojazdach kołowych, w miejsce
Szybkobieżne Pojazdy Gąsienicowe (22) nr 1, 2007 Jerzy NAWROCKI GĄSIENICOWY UKŁAD JEZDNY Streszczenie: W artykule przedstawiono możliwoś ci szybkiego zamontowania na terenowych pojazdach kołowych, w miejsce
RZECZPOSPOLITAPOLSKA (12)OPIS PATENTOWY (19)PL (11) (13)B1
OPIS PATENTOWY (19)PL (11) (13)B1") RZECZPOSPOLITAPOLSKA (12)OPIS PATENTOWY (19)PL (11)177192 (13)B1 (21)Numer zgłoszenia: 309529 Urząd Patentowy (22)Data Zgłoszenia: 0 4.07.1995 Rzeczypospolitej Polskiej (51) IntCl6. G 0 1N 3/56 G01N 19/02
RZECZPOSPOLITAPOLSKA (12)OPIS PATENTOWY (19)PL (11)177192 (13)B1 (21)Numer zgłoszenia: 309529 Urząd Patentowy (22)Data Zgłoszenia: 0 4.07.1995 Rzeczypospolitej Polskiej (51) IntCl6. G 0 1N 3/56 G01N 19/02
NAPRĘŻENIA ŚCISKAJĄCE PRZY 10% ODKSZTAŁCENIU WZGLĘDNYM PRÓBEK NORMOWYCH POBRANYCH Z PŁYT EPS O RÓŻNEJ GRUBOŚCI
 PRACE INSTYTUTU TECHNIKI BUDOWLANEJ - KWARTALNIK 1 (145) 2008 BUILDING RESEARCH INSTITUTE - QUARTERLY No 1 (145) 2008 Zbigniew Owczarek* NAPRĘŻENIA ŚCISKAJĄCE PRZY 10% ODKSZTAŁCENIU WZGLĘDNYM PRÓBEK NORMOWYCH
PRACE INSTYTUTU TECHNIKI BUDOWLANEJ - KWARTALNIK 1 (145) 2008 BUILDING RESEARCH INSTITUTE - QUARTERLY No 1 (145) 2008 Zbigniew Owczarek* NAPRĘŻENIA ŚCISKAJĄCE PRZY 10% ODKSZTAŁCENIU WZGLĘDNYM PRÓBEK NORMOWYCH
POLISH HYPERBARIC RESEARCH 3(60)2017 Journal of Polish Hyperbaric Medicine and Technology Society STRESZCZENIE
2017 Journal of Polish Hyperbaric Medicine and Technology Society STRESZCZENIE") POLISH HYPERBARIC RESEARCH 3(60)2017 ANALIZA UKŁADÓW NAPĘDOWYCH BEZZAŁOGOWYCH POJAZDÓW GŁĘBINOWYCH W KIERUNKU ZIDENTYFIKOWANIA SPOSOBU PRZENIESIENIA NAPĘDU CZĘŚĆ 2 Bartłomiej Jakus, Adam Olejnik Akademia
POLISH HYPERBARIC RESEARCH 3(60)2017 ANALIZA UKŁADÓW NAPĘDOWYCH BEZZAŁOGOWYCH POJAZDÓW GŁĘBINOWYCH W KIERUNKU ZIDENTYFIKOWANIA SPOSOBU PRZENIESIENIA NAPĘDU CZĘŚĆ 2 Bartłomiej Jakus, Adam Olejnik Akademia
CZTEROKULOWA MASZYNA TARCIA ROZSZERZENIE MOŻLIWOŚCI BADAWCZYCH W WARUNKACH ZMIENNYCH OBCIĄŻEŃ
 Artur MACIĄG, Wiesław OLSZEWSKI, Jan GUZIK Politechnika Radomska, Wydział Mechaniczny CZTEROKULOWA MASZYNA TARCIA ROZSZERZENIE MOŻLIWOŚCI BADAWCZYCH W WARUNKACH ZMIENNYCH OBCIĄŻEŃ Słowa kluczowe Czterokulowa
Artur MACIĄG, Wiesław OLSZEWSKI, Jan GUZIK Politechnika Radomska, Wydział Mechaniczny CZTEROKULOWA MASZYNA TARCIA ROZSZERZENIE MOŻLIWOŚCI BADAWCZYCH W WARUNKACH ZMIENNYCH OBCIĄŻEŃ Słowa kluczowe Czterokulowa
W OPARCIU JEDNOWIĄZKOWY SONDAŻ HYDROAKUSTYCZNY
 TWORZENIE MODELU DNA ZBIORNIKA WODNEGO W OPARCIU O JEDNOWIĄZKOWY SONDAŻ HYDROAKUSTYCZNY Tomasz Templin, Dariusz Popielarczyk Katedra Geodezji Satelitarnej i Nawigacji Uniwersytet Warmińsko Mazurski w Olsztynie
TWORZENIE MODELU DNA ZBIORNIKA WODNEGO W OPARCIU O JEDNOWIĄZKOWY SONDAŻ HYDROAKUSTYCZNY Tomasz Templin, Dariusz Popielarczyk Katedra Geodezji Satelitarnej i Nawigacji Uniwersytet Warmińsko Mazurski w Olsztynie
Temat: Zastosowanie multimetrów cyfrowych do pomiaru podstawowych wielkości elektrycznych
 INSTYTUT SYSTEMÓW INŻYNIERII ELEKTRYCZNEJ POLITECHNIKI ŁÓDZKIEJ WYDZIAŁ: KIERUNEK: ROK AKADEMICKI: SEMESTR: NR. GRUPY LAB: SPRAWOZDANIE Z ĆWICZEŃ W LABORATORIUM METROLOGII ELEKTRYCZNEJ I ELEKTRONICZNEJ
INSTYTUT SYSTEMÓW INŻYNIERII ELEKTRYCZNEJ POLITECHNIKI ŁÓDZKIEJ WYDZIAŁ: KIERUNEK: ROK AKADEMICKI: SEMESTR: NR. GRUPY LAB: SPRAWOZDANIE Z ĆWICZEŃ W LABORATORIUM METROLOGII ELEKTRYCZNEJ I ELEKTRONICZNEJ
WYDZIAŁ ELEKTRYCZNY KATEDRA AUTOMATYKI I ELEKTRONIKI. Badanie układu regulacji dwustawnej
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POPRAWA EFEKTYWNOŚCI ENERGETYCZNEJ UKŁADU NAPĘDOWEGO Z SILNIKIEM INDUKCYJNYM ŚREDNIEGO NAPIĘCIA POPRZEZ JEGO ZASILANIE Z PRZEMIENNIKA CZĘSTOTLIWOŚCI
 Zeszyty Problemowe Maszyny Elektryczne Nr 73/5 49 Zbigniew Szulc, łodzimierz Koczara Politechnika arszawska, arszawa POPRAA EFEKTYNOŚCI ENERGETYCZNEJ UKŁADU NAPĘDOEGO Z SILNIKIEM INDUKCYJNYM ŚREDNIEGO
Zeszyty Problemowe Maszyny Elektryczne Nr 73/5 49 Zbigniew Szulc, łodzimierz Koczara Politechnika arszawska, arszawa POPRAA EFEKTYNOŚCI ENERGETYCZNEJ UKŁADU NAPĘDOEGO Z SILNIKIEM INDUKCYJNYM ŚREDNIEGO
ELEMENTY ELEKTRONICZNE
 KATEDRA ELEKTRONIKI AGH L A B O R A T O R I U M ELEMENTY ELEKTRONICZNE DIODY REV. 2.0 1. CEL ĆWICZENIA - pomiary charakterystyk stałoprądowych diod prostowniczych, świecących oraz stabilizacyjnych - praktyczne
KATEDRA ELEKTRONIKI AGH L A B O R A T O R I U M ELEMENTY ELEKTRONICZNE DIODY REV. 2.0 1. CEL ĆWICZENIA - pomiary charakterystyk stałoprądowych diod prostowniczych, świecących oraz stabilizacyjnych - praktyczne
AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L2 STEROWANIE INWERTEROWYM URZĄDZENIEM CHŁODNICZYM W TRYBIE P
 ĆWICZENIE LABORAORYJNE AUOMAYKA I SEROWANIE W CHŁODNICWIE, KLIMAYZACJI I OGRZEWNICWIE L2 SEROWANIE INWEREROWYM URZĄDZENIEM CHŁODNICZYM W RYBIE P Wersja: 2013-09-30-1- 2.1. Cel ćwiczenia Celem ćwiczenia
ĆWICZENIE LABORAORYJNE AUOMAYKA I SEROWANIE W CHŁODNICWIE, KLIMAYZACJI I OGRZEWNICWIE L2 SEROWANIE INWEREROWYM URZĄDZENIEM CHŁODNICZYM W RYBIE P Wersja: 2013-09-30-1- 2.1. Cel ćwiczenia Celem ćwiczenia
1. Opis aplikacji. 2. Przeprowadzanie pomiarów. 3. Tworzenie sprawozdania
 1. Opis aplikacji Interfejs programu podzielony jest na dwie zakładki. Wszystkie ustawienia znajdują się w drugiej zakładce, są przygotowane do ćwiczenia i nie można ich zmieniac bez pozwolenia prowadzącego
1. Opis aplikacji Interfejs programu podzielony jest na dwie zakładki. Wszystkie ustawienia znajdują się w drugiej zakładce, są przygotowane do ćwiczenia i nie można ich zmieniac bez pozwolenia prowadzącego
Opis wyników projektu
 Opis wyników projektu Nowa generacja wysokosprawnych agregatów spalinowoelektrycznych Nr projektu: WND-POIG.01.03.01-24-015/09 Nr umowy: UDA-POIG.01.03.01-24-015/09-01 PROJEKT WSPÓŁFINANSOWANY PRZEZ UNIĘ
Opis wyników projektu Nowa generacja wysokosprawnych agregatów spalinowoelektrycznych Nr projektu: WND-POIG.01.03.01-24-015/09 Nr umowy: UDA-POIG.01.03.01-24-015/09-01 PROJEKT WSPÓŁFINANSOWANY PRZEZ UNIĘ
Określenie maksymalnego kosztu naprawy pojazdu
 MACIEJCZYK Andrzej 1 ZDZIENNICKI Zbigniew 2 Określenie maksymalnego kosztu naprawy pojazdu Kryterium naprawy pojazdu, aktualna wartość pojazdu, kwantyle i kwantyle warunkowe, skumulowana intensywność uszkodzeń
MACIEJCZYK Andrzej 1 ZDZIENNICKI Zbigniew 2 Określenie maksymalnego kosztu naprawy pojazdu Kryterium naprawy pojazdu, aktualna wartość pojazdu, kwantyle i kwantyle warunkowe, skumulowana intensywność uszkodzeń
Pierwsze komputery, np. ENIAC w 1946r. Obliczenia dotyczyły obiektów: o bardzo prostych geometriach (najczęściej modelowanych jako jednowymiarowe)
") METODA ELEMENTÓW W SKOŃCZONYCH 1 Pierwsze komputery, np. ENIAC w 1946r. Obliczenia dotyczyły obiektów: o bardzo prostych geometriach (najczęściej modelowanych jako jednowymiarowe) stałych własnościach
METODA ELEMENTÓW W SKOŃCZONYCH 1 Pierwsze komputery, np. ENIAC w 1946r. Obliczenia dotyczyły obiektów: o bardzo prostych geometriach (najczęściej modelowanych jako jednowymiarowe) stałych własnościach
PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM
 51 Maciej Gwoździewicz, Jan Zawilak Politechnika Wrocławska, Wrocław PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM REVIEW OF SINGLE-PHASE LINE
51 Maciej Gwoździewicz, Jan Zawilak Politechnika Wrocławska, Wrocław PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM REVIEW OF SINGLE-PHASE LINE
WPŁYW OBRÓBKI TERMICZNEJ ZIEMNIAKÓW NA PRĘDKOŚĆ PROPAGACJI FAL ULTRADŹWIĘKOWYCH
 Wpływ obróbki termicznej ziemniaków... Arkadiusz Ratajski, Andrzej Wesołowski Katedra InŜynierii Procesów Rolniczych Uniwersytet Warmińsko-Mazurski w Olsztynie WPŁYW OBRÓBKI TERMICZNEJ ZIEMNIAKÓW NA PRĘDKOŚĆ
Wpływ obróbki termicznej ziemniaków... Arkadiusz Ratajski, Andrzej Wesołowski Katedra InŜynierii Procesów Rolniczych Uniwersytet Warmińsko-Mazurski w Olsztynie WPŁYW OBRÓBKI TERMICZNEJ ZIEMNIAKÓW NA PRĘDKOŚĆ
INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Politechnika Śląska w Gliwicach INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH BADANIE TWORZYW SZTUCZNYCH OZNACZENIE WŁASNOŚCI MECHANICZNYCH PRZY STATYCZNYM ROZCIĄGANIU
INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Politechnika Śląska w Gliwicach INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH BADANIE TWORZYW SZTUCZNYCH OZNACZENIE WŁASNOŚCI MECHANICZNYCH PRZY STATYCZNYM ROZCIĄGANIU
BADANIE ROZKŁADU TEMPERATURY W PIECU PLANITERM
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ELEKTROTECHNIKI TEORETYCZNEJ I METROLOGII Instrukcja do zajęć laboratoryjnych z przedmiotu: Pomiary elektryczne wielkości nieelektrycznych 2 Kod przedmiotu:
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ELEKTROTECHNIKI TEORETYCZNEJ I METROLOGII Instrukcja do zajęć laboratoryjnych z przedmiotu: Pomiary elektryczne wielkości nieelektrycznych 2 Kod przedmiotu:
ZWROTNICOWY ROZJAZD.
 PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 113 Transport 2016 EKSPLOATACJA U ZWROTNICOWY ROZJAZD. DEFINICJ, 6 Streszczenie: ruchem kolejowym. Is rozjazd, W artykule autor podj w rozjazd. 1. sterowania
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 113 Transport 2016 EKSPLOATACJA U ZWROTNICOWY ROZJAZD. DEFINICJ, 6 Streszczenie: ruchem kolejowym. Is rozjazd, W artykule autor podj w rozjazd. 1. sterowania
MICRON3D skaner do zastosowań specjalnych. MICRON3D scanner for special applications
 Mgr inż. Dariusz Jasiński dj@smarttech3d.com SMARTTECH Sp. z o.o. MICRON3D skaner do zastosowań specjalnych W niniejszym artykule zaprezentowany został nowy skaner 3D firmy Smarttech, w którym do pomiaru
Mgr inż. Dariusz Jasiński dj@smarttech3d.com SMARTTECH Sp. z o.o. MICRON3D skaner do zastosowań specjalnych W niniejszym artykule zaprezentowany został nowy skaner 3D firmy Smarttech, w którym do pomiaru
Wpływ zanieczyszczenia torowiska na drogę hamowania tramwaju
 DYCHTO Rafał 1 PIETRUSZEWSKI Robert 2 Wpływ zanieczyszczenia torowiska na drogę hamowania tramwaju WSTĘP W Katedrze Pojazdów i Podstaw Budowy Maszyn Politechniki Łódzkiej prowadzone są badania, których
DYCHTO Rafał 1 PIETRUSZEWSKI Robert 2 Wpływ zanieczyszczenia torowiska na drogę hamowania tramwaju WSTĘP W Katedrze Pojazdów i Podstaw Budowy Maszyn Politechniki Łódzkiej prowadzone są badania, których
Konstrukcja i testy piezoelektrycznego systemu zadawania siły.
 Konstrukcja i testy piezoelektrycznego systemu zadawania siły. Kierownik projektu (stopień/tytuł, imię, nazwisko, e-mail): Imię i nazwisko: dr inż. Dariusz Jarząbek e-mail: djarz@ippt.pan.pl Sprawozdanie
Konstrukcja i testy piezoelektrycznego systemu zadawania siły. Kierownik projektu (stopień/tytuł, imię, nazwisko, e-mail): Imię i nazwisko: dr inż. Dariusz Jarząbek e-mail: djarz@ippt.pan.pl Sprawozdanie
PROJEKT ARCHITEKTURY PROGRAMOWEJ AUTONOMICZNEGO BIOMIMETYCZNEGO POJAZDU PODWODNEGO PRZEZNACZONEGO DO ZADAŃ ROZPOZNANIA PODWODNEGO
 Tomasz PRACZYK, Piotr SZYMAK Akademia Marynarki Wojennej, Gdynia PROJEKT ARCHITEKTURY PROGRAMOWEJ AUTONOMICZNEGO BIOMIMETYCZNEGO POJAZDU PODWODNEGO PRZEZNACZONEGO DO ZADAŃ ROZPOZNANIA PODWODNEGO Abstract
Tomasz PRACZYK, Piotr SZYMAK Akademia Marynarki Wojennej, Gdynia PROJEKT ARCHITEKTURY PROGRAMOWEJ AUTONOMICZNEGO BIOMIMETYCZNEGO POJAZDU PODWODNEGO PRZEZNACZONEGO DO ZADAŃ ROZPOZNANIA PODWODNEGO Abstract
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Podstawy Automatyzacji Okrętu
 Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, specjalności okrętowe Podstawy Automatyzacji Okrętu 1 WPROWADZENIE M. H. Ghaemi Luty 2018 Podstawy automatyzacji
Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa St. inż. I stopnia, sem. IV, specjalności okrętowe Podstawy Automatyzacji Okrętu 1 WPROWADZENIE M. H. Ghaemi Luty 2018 Podstawy automatyzacji
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
WSPÓŁPRACA NAPĘDÓW ZWROTNICOWYCH ZE ZWROTNICAMI ROZJAZDÓW DUŻYCH PRĘDKOŚCI
 Jerzy Mikulski Politechnika Śląska, Wydział Transportu, Zespół Automatyki w Transporcie Jakub Młyńczak Politechnika Śląska, Wydział Transportu, Zespół Automatyki w Transporcie WSPÓŁPRACA NAPĘDÓW ZWROTNICOWYCH
Jerzy Mikulski Politechnika Śląska, Wydział Transportu, Zespół Automatyki w Transporcie Jakub Młyńczak Politechnika Śląska, Wydział Transportu, Zespół Automatyki w Transporcie WSPÓŁPRACA NAPĘDÓW ZWROTNICOWYCH
Analiza kosztów eksploatacji pojazdów komunikacji miejskiej na przykładzie Miejskiego Przedsiębiorstwa Komunikacyjnego w Lublinie
 RYBICKA Iwona 1 DROŹDZIEL Paweł 2 Analiza kosztów eksploatacji pojazdów komunikacji miejskiej na przykładzie Miejskiego Przedsiębiorstwa Komunikacyjnego w Lublinie WSTĘP W dziedzinie komunikacji miejskiej
RYBICKA Iwona 1 DROŹDZIEL Paweł 2 Analiza kosztów eksploatacji pojazdów komunikacji miejskiej na przykładzie Miejskiego Przedsiębiorstwa Komunikacyjnego w Lublinie WSTĘP W dziedzinie komunikacji miejskiej
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
PODSTAWY KONSTRUKCJI MASZYN
 KLASA I TECHNIKUM ZAWODOWE DZIAŁ : ODWZOROWANIE PRZEDMIOTÓW Stopień celujący otrzymuje uczeń, który: opanował w pełni wymagania programowe a jego wiadomości i umiejętności są twórcze (dodatkowe prace,
KLASA I TECHNIKUM ZAWODOWE DZIAŁ : ODWZOROWANIE PRZEDMIOTÓW Stopień celujący otrzymuje uczeń, który: opanował w pełni wymagania programowe a jego wiadomości i umiejętności są twórcze (dodatkowe prace,
Ocena postaw przedsiębiorstw na temat doskonalenia jakości świadczonych usług logistycznych w zakresie transportu chłodniczego
 UWAGA UWAGA Poniższy artykuł jest jedynie polskim tłumaczeniem artykułu dr. inż. Teresy Gajewskiej pt. Assessment of companies attitudes connected with perfection of quality logistics services in refrigerated,
UWAGA UWAGA Poniższy artykuł jest jedynie polskim tłumaczeniem artykułu dr. inż. Teresy Gajewskiej pt. Assessment of companies attitudes connected with perfection of quality logistics services in refrigerated,
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
WPŁYW WIELKOŚCI WYDZIELEŃ GRAFITU NA WYTRZYMAŁOŚĆ ŻELIWA SFEROIDALNEGO NA ROZCIĄGANIE
 15/12 ARCHIWUM ODLEWNICTWA Rok 2004, Rocznik 4, Nr 12 Archives of Foundry Year 2004, Volume 4, Book 12 PAN Katowice PL ISSN 1642-5308 WPŁYW WIELKOŚCI WYDZIELEŃ GRAFITU NA WYTRZYMAŁOŚĆ ŻELIWA SFEROIDALNEGO
15/12 ARCHIWUM ODLEWNICTWA Rok 2004, Rocznik 4, Nr 12 Archives of Foundry Year 2004, Volume 4, Book 12 PAN Katowice PL ISSN 1642-5308 WPŁYW WIELKOŚCI WYDZIELEŃ GRAFITU NA WYTRZYMAŁOŚĆ ŻELIWA SFEROIDALNEGO
DETEKCJA FAL UDERZENIOWYCH W UKŁADACH ŁOPATKOWYCH CZĘŚCI NISKOPRĘŻNYCH TURBIN PAROWYCH
 Mgr inż. Anna GRZYMKOWSKA Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa DOI: 10.17814/mechanik.2015.7.236 DETEKCJA FAL UDERZENIOWYCH W UKŁADACH ŁOPATKOWYCH CZĘŚCI NISKOPRĘŻNYCH TURBIN PAROWYCH
Mgr inż. Anna GRZYMKOWSKA Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa DOI: 10.17814/mechanik.2015.7.236 DETEKCJA FAL UDERZENIOWYCH W UKŁADACH ŁOPATKOWYCH CZĘŚCI NISKOPRĘŻNYCH TURBIN PAROWYCH
ŚRODKI I URZĄDZENIA TRANSPORTU OKREŚLENIE CHARAKTERYSTYK OPOROWYCH ORAZ WSTĘPNY DOBÓR SILNIKA NAPĘDOWEGO JEDNOSTKI PŁYWAJĄCEJ
 ŚRODKI I URZĄDZENIA TRANSPORTU OKREŚLENIE CHARAKTERYSTYK OPOROWYCH ORAZ WSTĘPNY DOBÓR SILNIKA NAPĘDOWEGO JEDNOSTKI PŁYWAJĄCEJ Charakterystyka oporowa: Sposoby wyznaczania charakterystyki oporowej: Badania
ŚRODKI I URZĄDZENIA TRANSPORTU OKREŚLENIE CHARAKTERYSTYK OPOROWYCH ORAZ WSTĘPNY DOBÓR SILNIKA NAPĘDOWEGO JEDNOSTKI PŁYWAJĄCEJ Charakterystyka oporowa: Sposoby wyznaczania charakterystyki oporowej: Badania
STATYCZNA PRÓBA ROZCIĄGANIA
 Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: STATYCZNA PRÓBA ROZCIĄGANIA oprac. dr inż. Jarosław Filipiak Cel ćwiczenia 1. Zapoznanie się ze sposobem przeprowadzania statycznej
Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: STATYCZNA PRÓBA ROZCIĄGANIA oprac. dr inż. Jarosław Filipiak Cel ćwiczenia 1. Zapoznanie się ze sposobem przeprowadzania statycznej
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 05/18. WOJCIECH SAWCZUK, Bogucin, PL MAŁGORZATA ORCZYK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229658 (13) B1 (21) Numer zgłoszenia: 418362 (51) Int.Cl. F02B 41/00 (2006.01) F02B 75/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229658 (13) B1 (21) Numer zgłoszenia: 418362 (51) Int.Cl. F02B 41/00 (2006.01) F02B 75/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 01/14. TOMASZ KLEPKA, Lublin, PL JAROSŁAW LATALSKI, Lublin, PL
 PL 222323 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222323 (13) B1 (21) Numer zgłoszenia: 399707 (51) Int.Cl. B29C 43/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222323 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222323 (13) B1 (21) Numer zgłoszenia: 399707 (51) Int.Cl. B29C 43/32 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 175488 B1 (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1. (22) Data zgłoszenia: 08.12.1994
 OPIS PATENTOWY (19) PL (11) 175488 (13) B1. (22) Data zgłoszenia: 08.12.1994") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306167 (22) Data zgłoszenia: 08.12.1994 (51) IntCl6: G01K 13/00 G01C
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306167 (22) Data zgłoszenia: 08.12.1994 (51) IntCl6: G01K 13/00 G01C
PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA
 PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA 2010 Publikacje P (Przepisowe) wydawane przez Polski Rejestr Statków są uzupełnieniem lub rozszerzeniem Przepisów i stanowią
PRZEPISY PUBLIKACJA NR 19/P ANALIZA STREFOWEJ WYTRZYMAŁOŚCI KADŁUBA ZBIORNIKOWCA 2010 Publikacje P (Przepisowe) wydawane przez Polski Rejestr Statków są uzupełnieniem lub rozszerzeniem Przepisów i stanowią
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie D-3
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D-3 Temat: Obliczenie częstotliwości własnej drgań swobodnych wrzecion obrabiarek Konsultacje: prof. dr hab. inż. F. Oryński
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D-3 Temat: Obliczenie częstotliwości własnej drgań swobodnych wrzecion obrabiarek Konsultacje: prof. dr hab. inż. F. Oryński
Zadanie 3. Dla poziomego reflektora rozmiary binu determinowane są przez promień strefy Fresnela. Promień strefy Fresnela dany jest wzorem:
 Zadanie 3 Celem zadania jest obliczenie wielkości binu na poziomie celu. Bin jest to elementarna jednostka powierzchni zdjęcia sejsmicznego, która stanowi kryterium podziału powierzchni odbijającej. Jest
Zadanie 3 Celem zadania jest obliczenie wielkości binu na poziomie celu. Bin jest to elementarna jednostka powierzchni zdjęcia sejsmicznego, która stanowi kryterium podziału powierzchni odbijającej. Jest
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury. Czujniki stacjonarne.
 Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Analiza niestabilności powstających w trakcie procesu wytłaczania
 Analiza niestabilności powstających w trakcie procesu wytłaczania Mateusz Barczewski Stypendysta projektu pt. Wsparcie stypendialne dla doktorantów na kierunkach uznanych za strategiczne z punktu widzenia
Analiza niestabilności powstających w trakcie procesu wytłaczania Mateusz Barczewski Stypendysta projektu pt. Wsparcie stypendialne dla doktorantów na kierunkach uznanych za strategiczne z punktu widzenia
STOCHOWSKA WYDZIAŁ IN
 POLITECHNIKA CZĘSTOCHOWSKA WYDZIAŁ INŻYNIERII MECHANICZNEJ I INFORMATYKI Instytut Maszyn Tłokowych i Techniki Sterowania Laboratorium: Środowiskowe oddziaływanie motoryzacji Ćwiczenie nr 4 Imię i nazwisko
POLITECHNIKA CZĘSTOCHOWSKA WYDZIAŁ INŻYNIERII MECHANICZNEJ I INFORMATYKI Instytut Maszyn Tłokowych i Techniki Sterowania Laboratorium: Środowiskowe oddziaływanie motoryzacji Ćwiczenie nr 4 Imię i nazwisko
Prof. dr hab. inż. Tadeusz Szelangiewicz. transport morski
 17.09.2012 r. Prof. dr hab. inż. Tadeusz Szelangiewicz Dziedzina nauki: Dyscyplina: Specjalność naukowa: nauki techniczne budowa i eksploatacja maszyn projektowanie okrętu, hydromechanika okrętu, transport
17.09.2012 r. Prof. dr hab. inż. Tadeusz Szelangiewicz Dziedzina nauki: Dyscyplina: Specjalność naukowa: nauki techniczne budowa i eksploatacja maszyn projektowanie okrętu, hydromechanika okrętu, transport
PL B1. PRZEMYSŁOWY INSTYTUT AUTOMATYKI I POMIARÓW PIAP, Warszawa, PL BUP 13/09. RAFAŁ CZUPRYNIAK, Warszawa, PL
 PL 215871 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215871 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 384030 (22) Data zgłoszenia: 12.12.2007 (51) Int.Cl.
PL 215871 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215871 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 384030 (22) Data zgłoszenia: 12.12.2007 (51) Int.Cl.
Sterowanie wielkością zamówienia w Excelu - cz. 3
 Sterowanie wielkością zamówienia w Excelu - cz. 3 21.06.2005 r. 4. Planowanie eksperymentów symulacyjnych Podczas tego etapu ważne jest określenie typu rozkładu badanej charakterystyki. Dzięki tej informacji
Sterowanie wielkością zamówienia w Excelu - cz. 3 21.06.2005 r. 4. Planowanie eksperymentów symulacyjnych Podczas tego etapu ważne jest określenie typu rozkładu badanej charakterystyki. Dzięki tej informacji
BADANIA ZRÓŻNICOWANIA RYZYKA WYPADKÓW PRZY PRACY NA PRZYKŁADZIE ANALIZY STATYSTYKI WYPADKÓW DLA BRANŻY GÓRNICTWA I POLSKI
 14 BADANIA ZRÓŻNICOWANIA RYZYKA WYPADKÓW PRZY PRACY NA PRZYKŁADZIE ANALIZY STATYSTYKI WYPADKÓW DLA BRANŻY GÓRNICTWA I POLSKI 14.1 WSTĘP Ogólne wymagania prawne dotyczące przy pracy określają m.in. przepisy
14 BADANIA ZRÓŻNICOWANIA RYZYKA WYPADKÓW PRZY PRACY NA PRZYKŁADZIE ANALIZY STATYSTYKI WYPADKÓW DLA BRANŻY GÓRNICTWA I POLSKI 14.1 WSTĘP Ogólne wymagania prawne dotyczące przy pracy określają m.in. przepisy
Laboratorium z Konwersji Energii. Silnik Wiatrowy
 Laboratorium z Konwersji Energii Silnik Wiatrowy 1.0.WSTĘP Silnik wiatrowy to silnik wirnikowy zamieniający energię kinetyczną wiatru na pracę mechaniczną łopat wirnika, dzięki której wytwarzana jest energia
Laboratorium z Konwersji Energii Silnik Wiatrowy 1.0.WSTĘP Silnik wiatrowy to silnik wirnikowy zamieniający energię kinetyczną wiatru na pracę mechaniczną łopat wirnika, dzięki której wytwarzana jest energia
ANALIZA WYBRANYCH WŁAŚCIWOŚCI TRAKCYJNYCH CIĄGNIKA NEW HOLLAND TG 255
 Inżynieria Rolnicza 5(13)/28 ANALIZA WYBRANYCH WŁAŚCIWOŚCI TRAKCYJNYCH CIĄGNIKA NEW HOLLAND TG 255 Instytut Inżynierii Rolniczej, Uniwersytet Przyrodniczy we Wrocławiu Streszczenie. W pracy przedstawiono
Inżynieria Rolnicza 5(13)/28 ANALIZA WYBRANYCH WŁAŚCIWOŚCI TRAKCYJNYCH CIĄGNIKA NEW HOLLAND TG 255 Instytut Inżynierii Rolniczej, Uniwersytet Przyrodniczy we Wrocławiu Streszczenie. W pracy przedstawiono
Wartość średnia półokresowa prądu sinusoidalnego I śr : Analogicznie określa się wartość skuteczną i średnią napięcia sinusoidalnego:
 Ćwiczenie 27 Temat: Prąd przemienny jednofazowy Cel ćwiczenia: Rozróżnić parametry charakteryzujące przebieg prądu przemiennego, oszacować oraz obliczyć wartości wielkości elektrycznych w obwodach prądu
Ćwiczenie 27 Temat: Prąd przemienny jednofazowy Cel ćwiczenia: Rozróżnić parametry charakteryzujące przebieg prądu przemiennego, oszacować oraz obliczyć wartości wielkości elektrycznych w obwodach prądu
KONKURS FIZYCZNY dla uczniów gimnazjów województwa lubuskiego 27 stycznia 2012 r. zawody II stopnia (rejonowe) Schemat punktowania zadań
 Schemat punktowania zadań") Maksymalna liczba punktów 60 85% 5pkt KONKURS FIZYCZNY dla uczniów gimnazjów województwa lubuskiego 7 stycznia 0 r. zawody II stopnia (rejonowe) Schemat punktowania zadań Uwaga!. Za poprawne rozwiązanie
Maksymalna liczba punktów 60 85% 5pkt KONKURS FIZYCZNY dla uczniów gimnazjów województwa lubuskiego 7 stycznia 0 r. zawody II stopnia (rejonowe) Schemat punktowania zadań Uwaga!. Za poprawne rozwiązanie
SCENARIUSZ ZAJĘĆ SZKOLNEGO KOŁA NAUKOWEGO Z PRZEDMIOTU FIZYKA PROWADZONEGO W RAMACH PROJEKTU AKADEMIA UCZNIOWSKA
 SCENARIUSZ ZAJĘĆ SZKOLNEGO KOŁA NAUKOWEGO Z PRZEDMIOTU FIZYKA PROWADZONEGO W RAMACH PROJEKTU AKADEMIA UCZNIOWSKA Temat lekcji Czy okres i częstotliwość drgań wahadła matematycznego zależą od jego amplitudy?
SCENARIUSZ ZAJĘĆ SZKOLNEGO KOŁA NAUKOWEGO Z PRZEDMIOTU FIZYKA PROWADZONEGO W RAMACH PROJEKTU AKADEMIA UCZNIOWSKA Temat lekcji Czy okres i częstotliwość drgań wahadła matematycznego zależą od jego amplitudy?
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
WPŁYW ZAKŁÓCEŃ PROCESU WZBOGACANIA WĘGLA W OSADZARCE NA ZMIANY GĘSTOŚCI ROZDZIAŁU BADANIA LABORATORYJNE
 Górnictwo i Geoinżynieria Rok 33 Zeszyt 4 2009 Stanisław Cierpisz*, Daniel Kowol* WPŁYW ZAKŁÓCEŃ PROCESU WZBOGACANIA WĘGLA W OSADZARCE NA ZMIANY GĘSTOŚCI ROZDZIAŁU BADANIA LABORATORYJNE 1. Wstęp Zasadniczym
Górnictwo i Geoinżynieria Rok 33 Zeszyt 4 2009 Stanisław Cierpisz*, Daniel Kowol* WPŁYW ZAKŁÓCEŃ PROCESU WZBOGACANIA WĘGLA W OSADZARCE NA ZMIANY GĘSTOŚCI ROZDZIAŁU BADANIA LABORATORYJNE 1. Wstęp Zasadniczym
Wyniki pomiarów okresu drgań dla wahadła o długości l = 1,215 m i l = 0,5 cm.
 2 Wyniki pomiarów okresu drgań dla wahadła o długości l = 1,215 m i l = 0,5 cm. Nr pomiaru T[s] 1 2,21 2 2,23 3 2,19 4 2,22 5 2,25 6 2,19 7 2,23 8 2,24 9 2,18 10 2,16 Wyniki pomiarów okresu drgań dla wahadła
2 Wyniki pomiarów okresu drgań dla wahadła o długości l = 1,215 m i l = 0,5 cm. Nr pomiaru T[s] 1 2,21 2 2,23 3 2,19 4 2,22 5 2,25 6 2,19 7 2,23 8 2,24 9 2,18 10 2,16 Wyniki pomiarów okresu drgań dla wahadła
Szczegółowy Opis Przedmiotu Zamówienia
 Szczegółowy Opis Przedmiotu Zamówienia Wykonanie, dostawa i montaż elementów tunelu aerodynamicznego Ośrodka Hydromechaniki Okrętu Centrum Techniki Okrętowej S.A w Gdańsku 1. TUNEL AERODYNAMICZNY Przedmiotem
Szczegółowy Opis Przedmiotu Zamówienia Wykonanie, dostawa i montaż elementów tunelu aerodynamicznego Ośrodka Hydromechaniki Okrętu Centrum Techniki Okrętowej S.A w Gdańsku 1. TUNEL AERODYNAMICZNY Przedmiotem