Od prostego pozycjonowania po synchronizację. Rozwiązania Sterowania Ruchem. Napędy Elektryczne i Sterowania
|
|
|
- Alicja Głowacka
- 7 lat temu
- Przeglądów:
Transkrypt
1 Od prostego pozycjonowania po synchronizację Rozwiązania Sterowania Ruchem 1
2 Podstawy Silniki Sterowniki Serwo Sterowniki Motion Zajęcia praktyczne Przykłady parametryzacji serwonapędu Kreator parametryzacji dla modułów liniowych 2
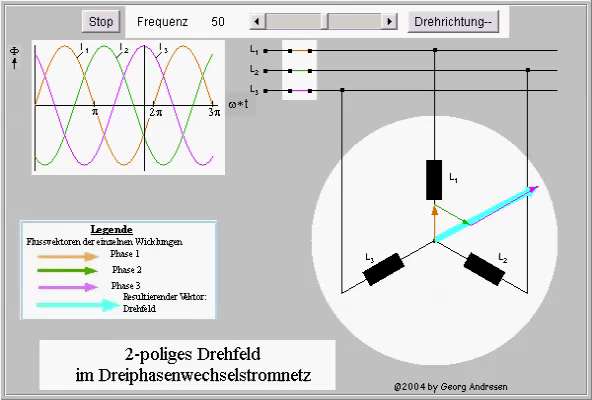

3 Dlaczego trójfazowy silnik się obraca? 3
. Stąd nazwa: Silniki synchroniczne W dzisiejszych czasach jest to realizowane głównie poprzez silniki z magnesami trwałymi.")
4 Działanie silnika synchronicznego Wirnik zarówno w stanie jałowym (bez obciążenia) jak i przy obciążeniu obraca się ze stałą prędkością, równą prędkości wirowania pola magnetycznego (z prędkością synchroniczną). Stąd nazwa: Silniki synchroniczne W dzisiejszych czasach jest to realizowane głównie poprzez silniki z magnesami trwałymi. 4
5 Budowa silnika Silnik asynchroniczny Silnik synchroniczny Terminal box Fan Laminated core Stator/Rotor Electrical connection Flange Housing (smooth surface) Feedback Rotor shaft Flange Bearing Coil (Stator) Short circuit cage Laminated core Stator/Rotor Housing Rotor shaft Bearing Permanent magnets (Rotor) AC coil (Stator) 5
6 Linear Motor Unwinding Rotator Motor Napędy Elektryczne i Sterowania Silnik Liniowy Silnik liniowy jest silnikiem elektrycznym Stator z rozwiniętym stojanem. Generuje siłę zamiast momentu. Nie mówimy już o wirniku i stojanie, Rotor N S S N ale o części pierwotnej i wtórej. Część pierwotna składa się z uzwojenia. S N N S Część wtórna składa się z magnesów trwałych (w przypadku silników synchronicznych). Primary N S N S N Secondary 6
7 Montaż i konfiguracja Część bazowa Część główna Prowadnice liniowe Skala liniowa 7
8 Porównanie technologii Konwencjonalny Napęd Liniowy bezpośredni napęd Enkoder Silnik Spindle Skala liniowa Prowadnica Skala liniowa Prowadnica Silnik Podstawa maszyny Podstawa maszyny Elastyczność Najwyższa dokładność powtarzania i dynamika z napędem bezpośrednim!!! 8
9 Porównanie typów silników Silnik asynchroniczny Silnik synchroniczny Silnik liniowy Konstrukcja Typowy zakres Moc: kw Stojan z Uzwojeniami Wirnik klatkowy P [kw] = M [Nm]. n [1/min] 9549 Stojan z uzwojeniami Wirnik z magnesami trwałymi Moment: Nm Primary N S N S N Siła: up to 20,000 N Secondary Cechy Trwały Tani i prosty w produkcji nawet dla dużych mocy Ciągła praca bez dużej dynamiki Duża wydajność Wysoka dokładność pozycjonowania Stabilna prędkość Wysoka dynamika Wysoka przeciążalność Wysoka sprawność Wysokie siły Duże prędkości i przyspieszenia Ruch liniowy o dużej powtarzalności Przykłady Wrzeciona obrabiarek Stoły obrotowe Nawijaki Maszyny drukarskie Pozycjonowanie Obrabiarki Synchronizacja Wykrawani, gięcie, montaż Stoły krzyżowe w obrabiarkach Centra obróbcze Piły latające 9
10 Zasada działania silnika 3-fazowego Jeśli proces wymaga od silnika stałą prędkość wykorzystywane są najczęściej silniki asynchroniczne bezpośrednio podłączone do sieci. Działają głównie pod pełnym obciążeniem. Prędkość synchroniczna n S = f 60 p # Poles Pole Pairs n sync 50Hz n sync 60Hz min min min min min min -1 1 para biegunów 2 pary biegunów min min -1 10
11 Praca ze zmienną prędkością Jeśli jest wymagana zmienna prędkość możliwe jest zastosowanie specjalnej konstrukcji silnika, jednakże takie rozwiązanie jest nieelastyczne i nie opłacalne. Zgodnie ze wzorem, f 60, prędkość n może być zmieniana poprzez zmianę n = S częstotliwości f. p Do tego celu używane są przetwornice częstotliwości. Przekształtnik częstotliwości generuje wewnętrznie napięcie stałe (DC), a następnie napięcie zmienne (AC). Napięcie te jest zamieniane poprzez falownik w napięcie o danej częstotliwości dostarczane do silnika. DC 11
12 Technology Basic Electric Drives & Controls Zasada działania przekształtnika częstotliwości 1/3 AC, U 1, f 1 constant Mains Motor Cable 3 AC, U 2, f 2 variable 12

13 Podstawy sterowania U/f Najprostszy rodzaj sterowania. Falownik kontroluje aby stosunek napięcia do częstotliwości był stały. Indukcyjne zachowanie silnika prowadzi do stałego momentu do osiągnięcia prędkości znamionowej bez przeciążenia silnika. Przy wyższych prędkościach dalsze dostosowanie prędkości nie jest możliwe: Moment maleje Minusy sterowania U/f: Mały moment przy niskich prędkościach Brak stabilności prędkości Ograniczona kontrola dynamiki 13
14 Sterowanie wektorowe dla zwykłych silników Wtedy gdy wymagana jest bardziej stabilna prędkość czy większa dynamika używane jest sterowanie wektorowe. Podstawowe cechy: Model obliczeniowy silnika elektrycznego, Określenie aktualnej prędkości, momentu, poślizgu z aktualnego prądu, Prędkość jest kontrolowana pośrednio poprzez kontrolę prądu, Oddzielna kontrola pola magnetycznego i momentu. Szeroki zakres momentu i prędkości: Prędkość: typowo 4-6 razy prędkość znamionowa, Moment: do 400% momentu znamionowego. Minusy: W porównaniu do sterowania skalarnego: Wymagany dobry czujnik prądu oraz mocny mikroprocesor. 14
15 Sterowanie wektorowe dla serwo silników Sterownik napędu z dokładną strukturą regulacyjną dla pozycji prędkości i momentu zwane są sterownikami serwonapędów Spełnione są jednocześnie najwyższe wymagania odnośnie precyzji, dynamiki oraz przeciążeń Największą różnicą w porównaniu do standardowych przetwornic częstotliwości jest sprzężenie zwrotne w postaci np. enkodera na silniku Sprzężenie zwrotne informuje stale sterownik napędu o pozycji wału silnika Algorytm różnicowy ustala aktualną prędkość na podstawie pozycji wału silnika i czasu Serwonapęd zamknięta pętla regulacji 15
16 Uproszczona pętla sterowania napędu elektrycznego Wartość komendy położenia Pętla położenia Advanced: 250 μs Basic : 500 μs F Pętla prędkości 125 μs 250 μs - Pętla prądowa 62.5 μs 125 μs u s i s ASM SM 16 khz 8Hz G d x d t 16
17 Przykład okablowania Mains: 3 Phase U: 400 V (const.) f: 50 Hz (const.) Controller Master communication Feedback Motor: 3 Phase U: variable f: variable 17
18 Rodzaje ruchu Ruch w jednej osi - Pozycjonowanie - Zmienna prędkość Ruch synchroniczny - Przekładnia - CAM Ruch skoordynowany - Roboty - Sterowanie numeryczne Regulator położenia F Regulator prędkości Regulator natężenia prądu u s - i s ASM SM d x d t G 18
19 Ruch w jednej osi Zmienna prędkość Pas Wentylator Pozycjonowanie - Pojedyncza oś 2 Pozycjonowanie - Wiele osi
20 Rodzaje ruchu Ruch w jednej osi - Pozycjonowanie - Zmienna prędkość Ruch synchroniczny - Przekładnia - CAM Ruch skoordynowany - Roboty - Sterowanie numeryczne Regulator położenia F Regulator prędkości Regulator natężenia prądu u s - i s ASM SM d x d t G 20


21 Ruch synchroniczny Mechaniczny wał liniowy Właściwości 1 główny napęd (kontrola prędkości) Sprzężenie mechaniczne z jednostkami maszyny Ograniczona elastyczność 21

22 Ruch synchroniczny Elektroniczny wał liniowy Motion Control (Controller) Bus system Drive (Converter) Motor Właściwości Minimum 1 napęd na jednostkę maszyny Brak mechanicznych sprzężeń z jednostkami maszyny Synchronizacja przez kontrolę ruchu oraz szynę systemową Duża elastyczność 22
23 Właściwości elektronicznego wału liniowego Master axis Coupling function Slave Axis Virtual Master Real Master Encoder 23
24 Rodzaje sprzężenia osiowego Synchronizacja prędkości Pas Synchronizacja fazowa Maszyna offsetowa Elektroniczny system CAM Poprzeczne uszczelnienia 24
25 Cabinet Napędy Elektryczne i Sterowania Architektura systemu klasyczna HMI Ethernet Programming & Commissioning Controller Motion & Logic I/O (centralized) Drives (Converter) I/O (decentralized) Motors 25
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Silnik indukcyjny - historia
 Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Laboratorium Elektroniki w Budowie Maszyn
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
PRĄDNICE I SILNIKI. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej.
 Szkoły Policealnej Zawodowej.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego
 Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH
 -CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
-CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 4. Strumień magnetyczny w maszynie synchroniczne magnes trwały, elektromagnes. Magneśnica wirnik z biegunami magnetycznymi. pn 60.
 Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
Silniki synchroniczne
 Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5
 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Wykład 1. Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi.
 Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Silniki prądu przemiennego
 Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
Wprowadzenie do mechatroniki
 Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Technika napędowa a efektywność energetyczna.
 Technika napędowa a efektywność energetyczna. Technika napędów a efektywność energetyczna. Napędy są w chwili obecnej najbardziej efektywnym rozwiązaniem pozwalającym szybko i w istotny sposób zredukować
Technika napędowa a efektywność energetyczna. Technika napędów a efektywność energetyczna. Napędy są w chwili obecnej najbardziej efektywnym rozwiązaniem pozwalającym szybko i w istotny sposób zredukować
Alternator. Elektrotechnika w środkach transportu 125
 y Elektrotechnika w środkach transportu 125 Elektrotechnika w środkach transportu 126 Zadania alternatora: Dostarczanie energii elektrycznej o określonej wartości napięcia (ogranicznik napięcia) Zapewnienie
y Elektrotechnika w środkach transportu 125 Elektrotechnika w środkach transportu 126 Zadania alternatora: Dostarczanie energii elektrycznej o określonej wartości napięcia (ogranicznik napięcia) Zapewnienie
Maszyna indukcyjna jest prądnicą, jeżeli prędkość wirnika jest większa od prędkości synchronicznej, czyli n > n 1 (s < 0).
.") Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
Silniki indukcyjne. Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe.
 Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Falowniki Wektorowe Rexroth Fv Parametryzacja
 Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Ćwiczenie 3 Falownik
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Przemiennik częstotliwości VFD2800CP43A-21
 Przemiennik częstotliwości Specyfikacja techniczna Specyfikacja Oznaczenie modelu Znamionowy prąd wyjściowy Moc wyjściowa silnika Przeciążalność 530 A (lekki rozruch) 460 A (normalny rozruch) 280 kw (lekki
Przemiennik częstotliwości Specyfikacja techniczna Specyfikacja Oznaczenie modelu Znamionowy prąd wyjściowy Moc wyjściowa silnika Przeciążalność 530 A (lekki rozruch) 460 A (normalny rozruch) 280 kw (lekki
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Cel ćwiczenia. Przetwornik elektromagnetyczny. Silniki krokowe. Układ sterowania napędu mechatronicznego z silnikiem krokowym.
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
WPŁYW ALGORYTMU STEROWANIA PRZEKSZTAŁTNIKA NA WŁAŚCIWOŚCI NAPĘDU Z SILNIKIEM BEZSZCZOTKOWYM
 Zeszyty Problemowe Maszyny Elektryczne Nr 1/2013 (98) 211 Emil Król, Marcin Maciążek BOBRME KOMEL, Katowice WPŁYW ALGORYTMU STEROWANIA PRZEKSZTAŁTNIKA NA WŁAŚCIWOŚCI NAPĘDU Z SILNIKIEM BEZSZCZOTKOWYM INFLUENCE
Zeszyty Problemowe Maszyny Elektryczne Nr 1/2013 (98) 211 Emil Król, Marcin Maciążek BOBRME KOMEL, Katowice WPŁYW ALGORYTMU STEROWANIA PRZEKSZTAŁTNIKA NA WŁAŚCIWOŚCI NAPĘDU Z SILNIKIEM BEZSZCZOTKOWYM INFLUENCE
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Z powyższej zależności wynikają prędkości synchroniczne n 0 podane niżej dla kilku wybranych wartości liczby par biegunów:
 Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
ZASTOSOWANIE SKOSU STOJANA W JEDNOFAZOWYM SILNIKU SYNCHRONICZNYM Z MAGNESAMI TRWAŁYMI
 Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) 29 Maciej Gwoździewicz, Mariusz Mikołajczak Politechnika Wrocławska, Wrocław ZASTOSOWANIE SKOSU STOJANA W JEDNOFAZOWYM SILNIKU SYNCHRONICZNYM Z
Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2016 (111) 29 Maciej Gwoździewicz, Mariusz Mikołajczak Politechnika Wrocławska, Wrocław ZASTOSOWANIE SKOSU STOJANA W JEDNOFAZOWYM SILNIKU SYNCHRONICZNYM Z
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
w10 Silnik AC y elektrotechniki odstaw P
 40 Wirujące pole magnetyczne Moment synchroniczny Moment asynchroniczny Charakterystyka silnika synchronicznego Charakterystyka silnika asynchronicznego Silnik klatkowy Silnik indukcyjny jednofazowy Moment
40 Wirujące pole magnetyczne Moment synchroniczny Moment asynchroniczny Charakterystyka silnika synchronicznego Charakterystyka silnika asynchronicznego Silnik klatkowy Silnik indukcyjny jednofazowy Moment
Silniki prądu stałego
 Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Pracownia Automatyki i Elektrotechniki Katedry Tworzyw Drzewnych Ćwiczenie 5. Analiza pracy oraz zasada działania silników asynchronicznych
 ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
Kacper Kulczycki. Krótko o silnikach krokowych (cz. 2.)
") Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
3.0 FALOWNIKI ASTRAADA DRV
 ASTOR KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI - ASTRAADA DRV 3.0 FALOWNIKI ASTRAADA DRV INFORMACJE OGÓLNE O FALOWNIKACH ASTRAADA DRV 3.1 FALOWNIKI ASTRAADA DRV 3.2 2015-06-05 3.2-1 KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI
ASTOR KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI - ASTRAADA DRV 3.0 FALOWNIKI ASTRAADA DRV INFORMACJE OGÓLNE O FALOWNIKACH ASTRAADA DRV 3.1 FALOWNIKI ASTRAADA DRV 3.2 2015-06-05 3.2-1 KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI
Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne
 Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
Opracował: mgr inż. Marcin Wieczorek
 Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Specyfikacja techniczna obrabiarki. wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40
 Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
WŁAŚCIWOŚCI EKSPLOATACYJNE SILNIKÓW RELUKTANCYJNYCH Z ROZRUCHEM ASYNCHRONICZNYM PRZY STEROWANIU CZĘSTOTLIWOŚCIOWYM
 Prace Naukowe Instytutu aszyn, Napędów i Pomiarów Elektrycznych Nr 58 Politechniki Wrocławskiej Nr 58 Studia i ateriały Nr 25 2005 napęd elektryczny, sterowanie częstotliwościowe, silniki reluktancyjne,
Prace Naukowe Instytutu aszyn, Napędów i Pomiarów Elektrycznych Nr 58 Politechniki Wrocławskiej Nr 58 Studia i ateriały Nr 25 2005 napęd elektryczny, sterowanie częstotliwościowe, silniki reluktancyjne,
EURA Drives Electric na Targach Forum Wentylacja 2015
 EURA Drives Electric na Targach Forum Wentylacja 2015 Premiera 4 nowych produktów, 36m2 powierzchni wystawienniczej, nawiązanie ponad 100 nowych kontaktów biznesowych, podpisanie 3 listów intencyjnych
EURA Drives Electric na Targach Forum Wentylacja 2015 Premiera 4 nowych produktów, 36m2 powierzchni wystawienniczej, nawiązanie ponad 100 nowych kontaktów biznesowych, podpisanie 3 listów intencyjnych
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO
 Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Rys.14 Schemat funkcjonalny układu RDC.
 mogą przetwarzać dane pomiarowe z TPK, których wał obraca się z maksymalną prędkością 62 400 obr/min, częstotliwość napięcia referencyjnego musi się zawierać w przedziale od 50 do 20 000 [Hz], w robotach
mogą przetwarzać dane pomiarowe z TPK, których wał obraca się z maksymalną prędkością 62 400 obr/min, częstotliwość napięcia referencyjnego musi się zawierać w przedziale od 50 do 20 000 [Hz], w robotach
MAGNETOELEKTRYCZNY SILNIK MAŁEJ MOCY Z KOMPAKTOWYM WIRNIKIEM HYBRYDOWYM I Z ROZRUCHEM SYNCHRONICZNYM
 Zeszyty Problemowe Maszyny Elektryczne Nr /1 (1) 1 Ludwik Antal, Paweł Zalas Instytut Maszyn, Napędów i Pomiarów Elektrycznych, Politechnika Wrocławska, Wrocław MAGNETOELEKTRYCZNY SILNIK MAŁEJ MOCY Z KOMPAKTOWYM
Zeszyty Problemowe Maszyny Elektryczne Nr /1 (1) 1 Ludwik Antal, Paweł Zalas Instytut Maszyn, Napędów i Pomiarów Elektrycznych, Politechnika Wrocławska, Wrocław MAGNETOELEKTRYCZNY SILNIK MAŁEJ MOCY Z KOMPAKTOWYM
Technika napędów elektrycznych jako klucz obniżenia kosztów energii.
 Technika napędów elektrycznych jako klucz obniżenia kosztów energii. Współczesne wyzwania dla Służb Utrzymania Ruchu, automatyków, projektantów i inżynierów 1. Zwiększenie wydajności 2. Niezawodność procesów
Technika napędów elektrycznych jako klucz obniżenia kosztów energii. Współczesne wyzwania dla Służb Utrzymania Ruchu, automatyków, projektantów i inżynierów 1. Zwiększenie wydajności 2. Niezawodność procesów
Kolejny krok naprzód w sterowaniu falowniki firmy Unitronics
 Przemienniki Częstotliwości Nowość! Kolejny krok naprzód w sterowaniu falowniki firmy Unitronics Jednofazowe 0.4-2.2kW Trójfazowe 0.75-110kW Oferta Seria UMI-B1 STO Model UMI-0004BE-B1 Napięcie wejściowe
Przemienniki Częstotliwości Nowość! Kolejny krok naprzód w sterowaniu falowniki firmy Unitronics Jednofazowe 0.4-2.2kW Trójfazowe 0.75-110kW Oferta Seria UMI-B1 STO Model UMI-0004BE-B1 Napięcie wejściowe
Tytuł Aplikacji: Synchronizacja i pozycjonowanie w przetwornicach częstotliwości Danfoss.
 Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Podstawowe definicje
 Podstawowe definicje Charakterystyki mechaniczne silnika o ruchu wirującym Ω = f(t) Prędkość wirowania Ω [rad/s] Bezwzględny uchyb prędkości ΔΩ = Ω 1 - Ω 1o Ω 1o ΔΩ = Ω 1 - Ω 1o Ω 1 Ω 2o Ω 2 Moment T [.
Podstawowe definicje Charakterystyki mechaniczne silnika o ruchu wirującym Ω = f(t) Prędkość wirowania Ω [rad/s] Bezwzględny uchyb prędkości ΔΩ = Ω 1 - Ω 1o Ω 1o ΔΩ = Ω 1 - Ω 1o Ω 1 Ω 2o Ω 2 Moment T [.
Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
MASZYNY INDUKCYJNE SPECJALNE
 MASZYNY INDUKCYJNE SPECJALNE Maszyny indukcyjne pierścieniowe, dzięki wyprowadzeniu na zewnątrz końców uzwojenia wirnika, możemy wykorzystać jako maszyny specjalne. W momencie potrzeby regulacji przesunięcia
MASZYNY INDUKCYJNE SPECJALNE Maszyny indukcyjne pierścieniowe, dzięki wyprowadzeniu na zewnątrz końców uzwojenia wirnika, możemy wykorzystać jako maszyny specjalne. W momencie potrzeby regulacji przesunięcia
SERIA AC30 / AC70 /nowa generacja falowników/
 SERIA AC30 / AC70 /nowa generacja falowników/ ul. P. Gojawiczyńskiej 13 44-109 Gliwice info@elektro-trading.com.pl Tel/fax: 32 734-55-70 AUTORYZOWANY DYSTRYBUTOR FIRMY PARKER FALOWNIKI SERII AC30/AC70
SERIA AC30 / AC70 /nowa generacja falowników/ ul. P. Gojawiczyńskiej 13 44-109 Gliwice info@elektro-trading.com.pl Tel/fax: 32 734-55-70 AUTORYZOWANY DYSTRYBUTOR FIRMY PARKER FALOWNIKI SERII AC30/AC70
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwonapędy AC Serie EDC, EDB, ProNet
 Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
ZWARTE PRĘTY ROZRUCHOWE W SILNIKU SYNCHRONICZNYM Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM
 ` Maszyny Elektryczne Zeszyty Problemowe Nr 3/2015 (107) 145 Maciej Gwoździewicz Wydział Elektryczny, Politechnika Wrocławska ZWARTE PRĘTY ROZRUCHOWE W SILNIKU SYNCHRONICZNYM Z MAGNESAMI TRWAŁYMI O ROZRUCHU
` Maszyny Elektryczne Zeszyty Problemowe Nr 3/2015 (107) 145 Maciej Gwoździewicz Wydział Elektryczny, Politechnika Wrocławska ZWARTE PRĘTY ROZRUCHOWE W SILNIKU SYNCHRONICZNYM Z MAGNESAMI TRWAŁYMI O ROZRUCHU
SPOSOBY REGULACJI PRĘDKOŚCI OBROTOWEJ SILNIKA W POJEŹDZIE Z NAPĘDEM ELEKTRYCZNYM
 Konrad ZAJKOWSKI, Stanisław DUER, Dominik ŁYSKOJĆ SPOSOBY REGULACJI PRĘDKOŚCI OBROTOWEJ SILNIKA W POJEŹDZIE Z NAPĘDEM ELEKTRYCZNYM Streszczenie W artykule omówiono możliwe metody regulacji prędkości silnika
Konrad ZAJKOWSKI, Stanisław DUER, Dominik ŁYSKOJĆ SPOSOBY REGULACJI PRĘDKOŚCI OBROTOWEJ SILNIKA W POJEŹDZIE Z NAPĘDEM ELEKTRYCZNYM Streszczenie W artykule omówiono możliwe metody regulacji prędkości silnika
Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi
 dr inż. ANDRZEJ DZIKOWSKI Instytut Technik Innowacyjnych EMAG Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi zasilanymi z przekształtników
dr inż. ANDRZEJ DZIKOWSKI Instytut Technik Innowacyjnych EMAG Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi zasilanymi z przekształtników
f r = s*f s Rys. 1 Schemat układu maszyny dwustronnie zasilanej R S T P r Generator MDZ Transformator dopasowujący Przekształtnik wirnikowy
 PORTFOLIO: Opracowanie koncepcji wdrożenia energooszczędnego układu obciążenia maszyny indukcyjnej dla przedsiębiorstwa diagnostyczno produkcyjnego. (Odpowiedź na zapotrzebowanie zgłoszone przez przedsiębiorstwo
PORTFOLIO: Opracowanie koncepcji wdrożenia energooszczędnego układu obciążenia maszyny indukcyjnej dla przedsiębiorstwa diagnostyczno produkcyjnego. (Odpowiedź na zapotrzebowanie zgłoszone przez przedsiębiorstwo
SILNIKI PRĄDU STAŁEGO
 SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Rys. 1. Krzywe mocy i momentu: a) w obcowzbudnym silniku prądu stałego, b) w odwzbudzanym silniku synchronicznym z magnesem trwałym
 w obcowzbudnym silniku prądu stałego, b) w odwzbudzanym silniku synchronicznym z magnesem trwałym") Tytuł projektu : Nowatorskie rozwiązanie napędu pojazdu elektrycznego z dwustrefowym silnikiem BLDC Umowa Nr NR01 0059 10 /2011 Czas realizacji : 2011-2013 Idea napędu z silnikami BLDC z przełączalną liczbą
Tytuł projektu : Nowatorskie rozwiązanie napędu pojazdu elektrycznego z dwustrefowym silnikiem BLDC Umowa Nr NR01 0059 10 /2011 Czas realizacji : 2011-2013 Idea napędu z silnikami BLDC z przełączalną liczbą
1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki:
 Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM
 51 Maciej Gwoździewicz, Jan Zawilak Politechnika Wrocławska, Wrocław PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM REVIEW OF SINGLE-PHASE LINE
51 Maciej Gwoździewicz, Jan Zawilak Politechnika Wrocławska, Wrocław PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM REVIEW OF SINGLE-PHASE LINE
SILNIK ELEKTRYCZNY O WZBUDZENIU HYBRYDOWYM
 ELEKTRYKA 2014 Zeszyt 2-3 (230-231) Rok LX Romuald GRZENIK Politechnika Śląska w Gliwicach SILNIK ELEKTRYCZNY O WZBUDZENIU HYBRYDOWYM Streszczenie. W artykule przedstawiono koncepcję bezszczotkowego silnika
ELEKTRYKA 2014 Zeszyt 2-3 (230-231) Rok LX Romuald GRZENIK Politechnika Śląska w Gliwicach SILNIK ELEKTRYCZNY O WZBUDZENIU HYBRYDOWYM Streszczenie. W artykule przedstawiono koncepcję bezszczotkowego silnika
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1. Zbigniew Krzemiński, MMB Drives sp. z o.o.
 Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B
 PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B PODSTAWOWE PARAMETRY TECHNICZNE: VMC850B Przesuwy X/Y/Z 1000 / 560 / 650 mm Maks. obciążenie stołu 600 kg Stożek wrzeciona SK40 - Maks. moc wrzeciona 9/10,5
PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B PODSTAWOWE PARAMETRY TECHNICZNE: VMC850B Przesuwy X/Y/Z 1000 / 560 / 650 mm Maks. obciążenie stołu 600 kg Stożek wrzeciona SK40 - Maks. moc wrzeciona 9/10,5
PRZETWORNICE CZĘSTOTLIWOŚCI DO NAPĘDU SILNIKÓW Z MAGNESAMI TRWAŁYMI
 Zeszyty Problemowe Maszyny Elektryczne Nr 76/2007 29 Andrzej Wnuk DANFOSS Sp. z o.o. Napędy Elektryczne, Grodzisk Mazowiecki PRZETWORNICE CZĘSTOTLIWOŚCI DO NAPĘDU SILNIKÓW Z MAGNESAMI TRWAŁYMI FREQUENCY
Zeszyty Problemowe Maszyny Elektryczne Nr 76/2007 29 Andrzej Wnuk DANFOSS Sp. z o.o. Napędy Elektryczne, Grodzisk Mazowiecki PRZETWORNICE CZĘSTOTLIWOŚCI DO NAPĘDU SILNIKÓW Z MAGNESAMI TRWAŁYMI FREQUENCY
ZESTAWIENIE PARAMETRÓW TECHNICZNYCH APARATURY BADAWCZEJ
 ZESTAWIENIE PARAMETRÓW TECHNICZNYCH APARATURY BADAWCZEJ STANOWISKA DO BADAŃ GENERATORÓW ASYNCHRONICZNYCH I SYNCHRONICZNYCH DLA ENERGETYKI ODNAWIALNEJ Zespół elektromaszynowy z jednofazowym samowzbudnym
ZESTAWIENIE PARAMETRÓW TECHNICZNYCH APARATURY BADAWCZEJ STANOWISKA DO BADAŃ GENERATORÓW ASYNCHRONICZNYCH I SYNCHRONICZNYCH DLA ENERGETYKI ODNAWIALNEJ Zespół elektromaszynowy z jednofazowym samowzbudnym
Softstart z hamulcem MCI 25B
 MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
SILNIK PMSM MAŁEJ MOCY PRZEZNACZONY DO ROZRUCHU SYNCHRONICZNEGO
 Zeszyty Problemowe Maszyny Elektryczne Nr 3/2012 (96) 125 Paweł Zalas, Ludwik Antal Politechnika Wrocławska, Wrocław SILNIK PMSM MAŁEJ MOCY PRZEZNACZONY DO ROZRUCHU SYNCHRONICZNEGO LOW POWER PERMANENT
Zeszyty Problemowe Maszyny Elektryczne Nr 3/2012 (96) 125 Paweł Zalas, Ludwik Antal Politechnika Wrocławska, Wrocław SILNIK PMSM MAŁEJ MOCY PRZEZNACZONY DO ROZRUCHU SYNCHRONICZNEGO LOW POWER PERMANENT
Maszyny elektryczne Electrical machines. Energetyka I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
9. Napęd elektryczny test
 9. Napęd elektryczny test 9.1 oment silnika prądu stałego opisany jest związkiem: a. = ωψ b. = IΨ c. = ωi d. = ω IΨ 9.2. oment obciążenia mechanicznego silnika o charakterze czynnym: a. działa zawsze przeciwnie
9. Napęd elektryczny test 9.1 oment silnika prądu stałego opisany jest związkiem: a. = ωψ b. = IΨ c. = ωi d. = ω IΨ 9.2. oment obciążenia mechanicznego silnika o charakterze czynnym: a. działa zawsze przeciwnie
OKREŚLENIE OBSZARÓW ENERGOOSZCZĘDNYCH W PRACY TRÓJFAZOWEGO SILNIKA INDUKCYJNEGO
 Feliks Mirkowski OKREŚLENIE OBSZARÓW ENERGOOSZCZĘDNYCH W PRACY TRÓJFAZOWEGO SILNIKA INDUKCYJNEGO Streszczenie. JeŜeli obciąŝenie silnika jest mniejsze od znamionowego, to jego zasilanie napięciem znamionowym
Feliks Mirkowski OKREŚLENIE OBSZARÓW ENERGOOSZCZĘDNYCH W PRACY TRÓJFAZOWEGO SILNIKA INDUKCYJNEGO Streszczenie. JeŜeli obciąŝenie silnika jest mniejsze od znamionowego, to jego zasilanie napięciem znamionowym
WYSOKOSPRAWNY JEDNOFAZOWY SILNIK LSPMSM O LICZBIE BIEGUNÓW 2p = 4 BADANIA EKSPERYMENTALNE
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 70 Politechniki Wrocławskiej Nr 70 Studia i Materiały Nr 34 2014 Agata PIESIEWICZ, Maciej GWOŹDZIEWICZ*, Paweł ZALAS* jednofazowy silnik
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 70 Politechniki Wrocławskiej Nr 70 Studia i Materiały Nr 34 2014 Agata PIESIEWICZ, Maciej GWOŹDZIEWICZ*, Paweł ZALAS* jednofazowy silnik
Zintegrowane sterowanie ruchem w sieci EtherNet/IP
 Zintegrowane sterowanie ruchem w sieci EtherNet/IP Product Update Grzegorz Bauer Kwiecień 2014 Rev 5058-CO900B Copyright 2012 Rockwell Automation, Inc. All rights reserved. Oparty na otwartym, globalnym
Zintegrowane sterowanie ruchem w sieci EtherNet/IP Product Update Grzegorz Bauer Kwiecień 2014 Rev 5058-CO900B Copyright 2012 Rockwell Automation, Inc. All rights reserved. Oparty na otwartym, globalnym
Elektryczne napędy główne na statkach
 Elektryczne napędy główne na statkach Elżbieta Bogalecka 2017-02-05 1 Wiek XIX - silnik spalinowy 1860r. opatentowany pierwszy silnik spalinowy 1893r. R.Diesel patentuje silnik o zapłonie samoczynnym 80%
Elektryczne napędy główne na statkach Elżbieta Bogalecka 2017-02-05 1 Wiek XIX - silnik spalinowy 1860r. opatentowany pierwszy silnik spalinowy 1893r. R.Diesel patentuje silnik o zapłonie samoczynnym 80%
Katedra Automatyzacji
 Polit echnik a Lubelsk a, Wydział Mechaniczny Katedra Automatyzacji ul. Nadbystrzycka 36, 20-618 Lubl i n tel./fax.:(+48 81) 5384267 e-mai l :automat@pol l ub.pl; wm.ka@pol l ub.p LABORATORIUM PODSTAW
Polit echnik a Lubelsk a, Wydział Mechaniczny Katedra Automatyzacji ul. Nadbystrzycka 36, 20-618 Lubl i n tel./fax.:(+48 81) 5384267 e-mai l :automat@pol l ub.pl; wm.ka@pol l ub.p LABORATORIUM PODSTAW
SAMOCZYNNA SYNCHRONIZACJA SILNIKÓW LSPMSM
 Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2018 (119) 139 Paweł Zalas, Jan Zawilak Politechnika Wrocławska, Wrocław SAMOCZYNNA SYNCHRONIZACJA SILNIKÓW LSPMSM AUTOMATIC SYNCHRONIZATION OF MOTORS TYPE
Maszyny Elektryczne - Zeszyty Problemowe Nr 3/2018 (119) 139 Paweł Zalas, Jan Zawilak Politechnika Wrocławska, Wrocław SAMOCZYNNA SYNCHRONIZACJA SILNIKÓW LSPMSM AUTOMATIC SYNCHRONIZATION OF MOTORS TYPE
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Silniki skokowe - cz. 1: budowa i zasada działania
 Jakub Wierciak Silniki skokowe - cz. 1: budowa i zasada działania Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania
Jakub Wierciak Silniki skokowe - cz. 1: budowa i zasada działania Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/ T
 Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/104-110T IE3 Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora KEF/4-225/104-110T IE3 Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika
Badanie napędu z silnikiem bezszczotkowym prądu stałego
 Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
2. Struktura programu MotorSolve. Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
 2. Struktura programu MotorSolve Zakres zastosowań Program MotorSolve pozwala na projektowanie 3 rodzajów silników prądu przemiennego: synchronicznych wzbudzanych magnesami trwałymi lub elektromagnetycznie,
2. Struktura programu MotorSolve Zakres zastosowań Program MotorSolve pozwala na projektowanie 3 rodzajów silników prądu przemiennego: synchronicznych wzbudzanych magnesami trwałymi lub elektromagnetycznie,
WYKORZYSTANIE PROCESORA SYGNAŁOWEGO DO STEROWANIA SILNIKIEM Z MAGNESAMI TRWAŁYMI
 Zeszyty Problemowe Maszyny Elektryczne Nr 2/2013 (99) 259 Tomasz Rudnicki, Robert Czerwiński Politechnika Śląska, Gliwice WYKORZYSTANIE PROCESORA SYGNAŁOWEGO DO STEROWANIA SILNIKIEM Z MAGNESAMI TRWAŁYMI
Zeszyty Problemowe Maszyny Elektryczne Nr 2/2013 (99) 259 Tomasz Rudnicki, Robert Czerwiński Politechnika Śląska, Gliwice WYKORZYSTANIE PROCESORA SYGNAŁOWEGO DO STEROWANIA SILNIKIEM Z MAGNESAMI TRWAŁYMI
Zespół Dydaktyczno-Naukowy Napędów i Sterowania Instytut Maszyn Roboczych Ciężkich P.W. Laboratorium Układów Napędowych ĆWICZENIE 3
 Zespół Dydaktyczno-Naukowy Napędów i Sterowania Instytut Maszyn Roboczych Ciężkich P.W. Laboratorium Układów Napędowych ĆWICZENIE 3 Zastosowanie falownika jako układu sterowania pracą silnika indukcyjnego
Zespół Dydaktyczno-Naukowy Napędów i Sterowania Instytut Maszyn Roboczych Ciężkich P.W. Laboratorium Układów Napędowych ĆWICZENIE 3 Zastosowanie falownika jako układu sterowania pracą silnika indukcyjnego
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ
 KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
KOMPLETNA OFERTA DLA AUTOMATYKI PRZEMYSŁOWEJ sterowniki PLC FATEK / panele HMI Weintek / technika liniowa Hiwin pneumatyka / serwonapędy ABB i Estun / napędy liniowe LinMot / silniki krokowe / łożyska
Przemienniki częstotliwości ANSALDO precyzyjna regulacja prędkości obrotowej silników indukcyjnych. Sterowanie prędkością.
 Przemienniki częstotliwości ANSALDO precyzyjna regulacja prędkości obrotowej silników indukcyjnych Najczęściej spotykanymi urządzeniami wykonawczymi zarówno w przemyśle jak i w zastosowaniach komercyjnych
Przemienniki częstotliwości ANSALDO precyzyjna regulacja prędkości obrotowej silników indukcyjnych Najczęściej spotykanymi urządzeniami wykonawczymi zarówno w przemyśle jak i w zastosowaniach komercyjnych
PAScz3. Elektryczne maszynowe napędy wykonawcze
 PAScz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
PAScz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Rotor RAS
 Rotor RAS e-mail: spid@alpha.pl www.spid.alpha.pl OPIS Rotor RAS jest rotorem o dużej wytrzymałości, zaprojektowanym do obracania dużych anten satelitarnych, dostarczanym wraz z elektronicznym modułem
Rotor RAS e-mail: spid@alpha.pl www.spid.alpha.pl OPIS Rotor RAS jest rotorem o dużej wytrzymałości, zaprojektowanym do obracania dużych anten satelitarnych, dostarczanym wraz z elektronicznym modułem
HPB-F wentylator promieniowy
 HPB-F wentylator promieniowy ZASTOSOWANIE Wentylator przeznaczony do systemów transportu nieagresywnych i niewybuchowych gazów bez zanieczyszczeń. Typowe zastosowania to: transport pneumatyczny, nadmuch
HPB-F wentylator promieniowy ZASTOSOWANIE Wentylator przeznaczony do systemów transportu nieagresywnych i niewybuchowych gazów bez zanieczyszczeń. Typowe zastosowania to: transport pneumatyczny, nadmuch
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (13) T3 (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (13) T3 (96) Data i numer zgłoszenia patentu europejskiego:") RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 172874 (13) T3 (96) Data i numer zgłoszenia patentu europejskiego: 04.0.2006 0611312. (1) Int. Cl. B23B31/28 (2006.01) (97)
RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 172874 (13) T3 (96) Data i numer zgłoszenia patentu europejskiego: 04.0.2006 0611312. (1) Int. Cl. B23B31/28 (2006.01) (97)
Wykład 2. Tabliczka znamionowa zawiera: Moc znamionową P N, Napięcie znamionowe uzwojenia stojana U 1N, oraz układ
 Serwonapędy w automatyce i robotyce Wykład 2 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik indukcyjny 3-fazowy tabliczka znam. Tabliczka znamionowa zawiera: Moc znamionową P, apięcie znamionowe
Serwonapędy w automatyce i robotyce Wykład 2 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik indukcyjny 3-fazowy tabliczka znam. Tabliczka znamionowa zawiera: Moc znamionową P, apięcie znamionowe
Załącznik nr Wybrane w pracy ustawienia modelu maszyny asynchronicznej w środowisku Matalab/Simulink karta Configuration...
 Zawartość 1. Model matematyczny maszyny sterowanej... 3 1.2. Wybrane w pracy ustawienia modelu maszyny asynchronicznej w środowisku Matalab/Simulink karta Configuration... 6 1.2.1. Preset model model opcji...
Zawartość 1. Model matematyczny maszyny sterowanej... 3 1.2. Wybrane w pracy ustawienia modelu maszyny asynchronicznej w środowisku Matalab/Simulink karta Configuration... 6 1.2.1. Preset model model opcji...
STEROWANIE CZĘSTOTLIWOŚCIOWE SILNIKÓW INDUKCYJNYCH SYNCHRONIZOWANYCH
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wrocławskiej Nr 60 Studia i Materiały Nr 27 2007 Stanisław AZAREWICZ *, Marcin GRYS ** Napęd elektryczny, sterowanie
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wrocławskiej Nr 60 Studia i Materiały Nr 27 2007 Stanisław AZAREWICZ *, Marcin GRYS ** Napęd elektryczny, sterowanie