APLIKACYJNE WYKORZYSTANIE SIECI STACJI REFERENCYJNYCH GNSS
|
|
|
- Maciej Wiśniewski
- 10 lat temu
- Przeglądów:
Transkrypt
1 APLIKACYJNE WYKORZYSTANIE SIECI STACJI REFERENCYJNYCH GNSS Jarosław Bosy, Paweł Wielgosz, Witold Rohm, Jacek Paziewski, Jan Kapłon, Anna Krypiak-Gregorczyk Katarzyna Stępniak, Tomasz Hadaś, Karina Wilgan, Jan Sierny, Marta Krukowska, Paweł Hordyniec Seminarium Realizacja Osnów Geodezyjnych a Problemy Geodynamiki, Grybów, września 2014
2 Participants The GNSS & Meteorology group of the Wroclaw University of Environmental and Life Sciences (WUELS) Jarosław Bosy, Witold Rohm, Jan Kapłon, Tomasz Hadaś, Karina Wilgan, Jan Sierny, Paweł Hordyniec Advanced Methods for Satellite Positioning Laboratory of the University of Warmia and Mazury in Olsztyn (UWM) Paweł Wielgosz, Jacek Paziewski, Anna Krypiak-Gregorczyk, Katarzyna Stępniak, Marta Krukowska
3 Aktualne zadania badawcze Integracja danych z różnych systemów GNSS Wykorzystanie nowych cywilnych sygnałów GPS oraz serwisów IGS-RTS Analizy dokładności modeli centrów fazowych anten GNSS Modelowanie jonosfery Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
4 Integracja danych z różnych systemów GNSS Badania nad Inter System Bias (ISB) Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
5 UWM - Eksperyment I Ścisła integracja obserwacji z systemów GPS i Galileo wymaga uwzględnienia różnic w: systemach czasu; układach odniesienia; międzysystemowych opóźnieniach sprzętowych odbiornika - inter-system bias ISB. Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
6 UWM - Eksperyment I Badane: wielkość ISB, stabilność w trakcie sesji oraz długookresowa stabilność Dane obserwacyjne: Data: r. 1:20-7:00 UTC oraz r. 15:00-21:00 UTC; Odbiorniki GNSS : Javad Alpha (2x), Javad Sigma, Leica GR25; ZERO-baseline; Śledzone Galileo IOV : E11, E12 w 2013 oraz E11, E12, E19 w 2014; Częstotliwość : L1/E1; Rozwiązanie z pojedynczej epoki obserwacyjnej; Orbity: IGS, TUM. Javad Alpha #1 Javad Alpha #2 Javad Sigma Leica GR25 Schemat podłączenia odbiorników GNSS Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
7 UWM - Eksperyment I Statystyki wyznaczeń fazowych i kodowych międzysystemowych GPS-Galileo opóźnień sprzętowych odbiorników dla częstotliwości L1/E1 Odbiorniki Javad ALPHA#1 Javad ALPHA#2 Javad ALPHA#1 Javad SIGMA Javad ALPHA#1 Leica GR25 Javad ALPHA#2 Leica GR25 Javad ALPHA#2 Javad SIGMA Javad SIGMA Leica GR25 Rok ISB dla obserwacji fazowych [cycle] średnia odchylenie standardowe ISB dla obserwacji kodowych [m] średnia odchylenie standardowe Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
8 phase ISB [cycle] pseudorange ISB [m] phase ISB [cycle] pseudorange ISB [m] Gal. elevation [deg] UWM - Eksperyment I Javad Alpha#1- Javad Alpha#2 mean phase ISB = cycle std phase ISB =0.003 cycle :00 16:00 17:00 18:00 19:00 20:00 UTC mean pseudorange ISB = m std pseudorange ISB = 0.34 m -6 15:00 16:00 17:00 18:00 19:00 20:00 UTC PRN E11 PRN E12 PRN E Javad Sigma - Leica GR25 mean phase ISB = cycle std phase ISB =0.009 cycle mean pseudorange ISB = m std pseudorange ISB = 0.35 m :00 16:00 17:00 18:00 19:00 20:00 UTC :00 16:00 17:00 18:00 19:00 20:00 UTC ISB dla analizowanych par odbiorników Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
9 UWM - Eksperyment II Badane: wpływ metody uwzględnienia ISB na wiarygodność rozwiązania nieoznaczoności Dwie metody zostały poddane analizie: 1. Uwzględnienie dodatkowych parametrów w wyrównaniu obserwacji dla fazowych i kodowych ISB (estymacja). 2. Korekcja obserwacji poprzez wprowadzenie znanych - wyznaczonych wcześniej fazowych i kodowych opóźnień sprzętowych. Analizowane parametry jakości rozwiązania nieoznaczoności: Time-to-Fix (TF); Ambiguity Resolution Success Rate (AS); Ambiguity Validation Failure Rate (AF); Udział sesji prawidłowo rozwiązanych w pierwszej epoce(1epf). Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
10 UWM - Eksperyment II Dane obserwacyjne: Stacje permanentne UNB; Data: r. 4:00-9:00 GPST; Częstotliwość: L1/E1; Algorytm rozwiązania nieoznaczoności: LAMBDA; Walidacja rozwiązania nieoznaczoności: W-ratio; Długość wektora: 19 m; Odbiornik referencyjny: Trimble; Rover: Javad, Septentrio Anteny: TRM (Septentrio, JAVAD), TRM (Trimble); Pozycjonowanie względne na podstawie 5-minutowych sesji obserwacyjnych z 30-sekundowym interwałem. 19m Septentrio POLARX-S Javad DELTA Trimble NETR9 Schemat podłączenia odbiorników GNSS Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
11 UWM - Eksperyment II Statystyki rozwiązań pozycji Wektor Strategia obliczeniowa 1epF [%] TF # ep. AS [%] AF [%] Trimble - Javad Trimble - Septentrio Estymacja Korekcja Estymacja Korekcja W każdym przypadku wprowadzenie znanych wartości ISB daje lepsze rezultaty niż estymacja dodatkowego parametru. Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
12 UWM - Eksperyment I i II: wnioski Wartości sprzętowych opóźnień międzysystemowych GPS-Galileo są stabilne zarówno czasie sesji obserwacyjnej jak również wykazują dużą powtarzalność pomiędzy eksperymentami przeprowadzonymi z interwałem ok 1,5 roku. Wykorzystanie odbiorników tego samego typu skutkuje brakiem występowania ISB. Przy wykorzystaniu odbiorników różnych producentów wpływ ISB jest istotny i nie może zostać pominięty. Wprowadzenie znanych wartości ISB w modelu pozycjonowania daje lepsze rezultaty niż estymacja ISB jako dodatkowego parametru. Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
13 Wykorzystanie nowych cywilnych sygnałów GPS oraz serwisu IGS - RTS Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
14 Nowe sygnały GPS Wybrane właściwości nowych sygnałów GPS L2C 13 satelitów operacyjnych (na 25 czerwiec 2014r.) pełna operacyjność planowana na 2018 r. nadawany w paśmie ogólnym RNSS (Radio Navigation Satellite Services) modulacja sygnału za pomocą techniki BPSK (Bi-Phase Shift Key) większa moc w stosunku do sygnału kodowego nadawanego na L1, co poprawi odbiór sygnału w trudnych warunkach obserwacyjnych (pod drzewami, wewnątrz pomieszczeń) pozwala na tworzenie kombinacji liniowych z sygnałem kodowy nadawanym na L1 (C1) pozwala na szybsza akwizycję sygnału L5 6 satelitów operacyjnych (na 25 czerwiec 2014r.) pełna operacyjność planowana na 2021 r. nadawany w paśmie chronionym ARNS (Aeronautical Radio Navigation Services) modulacja sygnału za pomocą techniki BPSK (Bi-Phase Shift Key) większa moc sygnału niż sygnału kodowego nadawanego na L1 i sygnału L2C, co jeszcze bardziej poprawi odbiór sygnału w trudnych warunkach obserwacyjnych (pod drzewami oraz wewnątrz pomieszczeń) pozwala na tworzenie kombinacji liniowych z sygnałami C1 i L2C większa odporność na zakłócenia przewidziany jako sygnał do zastosowań cywilnych, m.in. safety-of-life Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
15 Wstępne badania Opracowanie danych testowych: stacja testowa: POTS (Poczdam); długość sesji: 23h; interwał: 180s; stan jonosfery: spokojna, Kp 4+; użyty sygnał: C1; eliminacja refrakcji jonosferycznej: bez eliminowania wpływu jonosfery; użycie modelu CODE predicted (IONO); zastosowanie międzyczęstotliwościowych opóźnień sprzętowych (DCB) wyznaczonych dla satelitów: bez użycia opóźnień sprzętowych; z użyciem opóźnień sprzętowych (DCB); orbity: orbita nawigacyjnej (NAV); orbita precyzyjnej (SP3). Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
16 dn [m] dn [m] dn [m] dn [m] dn [m] dn [m] Wyniki wstępnych badań C1 + NAV C1 + NAV + DCB C1P1 C1 + NAV + DCB C1P1 + IONO 66.52% < 1m de [m] % < 1m de [m] de [m] C1 + SP3 C1 + SP3 + DCB C1P1/P1P2 C1 + SP3 + DCB C1P1/P1P2 + IONO % < 1m % < 1m de [m] % < 1m de [m] % < 1m de [m] Odchyłki współrzędnych poziomych otrzymane przy użyciu różnych wariantów obliczeń Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
17 Wnioski Prawidłowo zastosowana orbita precyzyjna znacząco poprawia dokładność rozwiązania pozycji. Wpływ na dokładność rozwiązania ma także użycie do obliczeń modeli opóźnienia jonosferycznego. Przy optymalnym wariancie obliczeń, dla sygnału C1 w ponad 97% przypadków otrzymano odchyłkę od pozycji referencyjnej (dla współrzędnych poziomych) mniejszą niż 1m. Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
18 Badania dokładności modeli centrów fazowych anten GNSS Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
19 Metoda pomiaru Antena referencyjna Antena 1 Antena 2 Antena 3 Antena referencyjna 3x24h 3x24h 3x24h 3x24h 3x24h Schemat pomiaru Baza kalibracyjna o długości 24 m Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
20 dn [mm] du [mm] dn [mm] du [mm] Centra fazowe Badanie dokładności modeli centrów fazowych anten GPS z uwzględnieniem rodzaju kalibracji ASH700936F C SNOW S/N ASH700936F C SNOW S/N de [mm] session no Odchyłki współrzędnych NEU otrzymane na podstawie pomiarów anteną referencyjną ASH700936F_C SNOW (kalibracje IGS) ASH A NONE No 1 ASH A NONE No Model IGS Model NGS de [mm] nr sesji Odchyłki współrzędnych NEU otrzymane na podstawie pomiarów anteną ASH A IGS NGS Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
21 Centra fazowe Antenna S/N origin Type 1 ASH701945E_M SNOW 4004 AOAD/M_T 263 LEIAX1202GG ASH700228D 2160 LEIAX1202GG rot. 180º ASH700228D JAV_GRANT-G3T 460 TRMR8_GNSS TRMR8_GNSS TRMR8_GNSS NoA/ NoC 2 Azi 3 All values are given in [mm] dn de du STD N STD E STD U IGS R 1/6 y NGS R 1/6 n IGS R 2/62 y NGS R 2/62 n IGS R 14/28 y NGS R 14/28 n IGS R 4/21 y NGS R 4/21 n IGS R 14/28 y NGS R 14/28 n IGS R 4/21 y NGS R 4/21 n IGS R 5/10 y NGS R 5/10 n IGS R 5/10 y NGS R 5/10 n IGS R 5/10 y NGS R 5/10 n IGS R 5/10 y NGS R 5/10 n Calibration type: R robot Geo++ GmbH; CN Field NGS, converted from relative NGS antenna calibrations; 2 NoA/NoC: Number of Calibrated Antennas / Number of Individual Calibrations; 3 Azi: (y) AZImuth dependent phase pattern values available; (n) not available; 4 x data not available. Wyniki testów polowych 1/3 Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
22 Centra fazowe Antenna S/N origin Type 1 NoA/ NoC 2 Azi 3 All values are given in [mm] dn de du STD N STD E STD U ASH IGS x x 4 x x x x x x x NGS CN 3/x n TPSHIPER_PLUS IGS CN 3/x n NGS CN 3/x n TPSHIPER_PLUS IGS CN 3/x n NGS CN 3/x n JAV_GRANT-G3T rot. 180º 460 IGS R 5/10 y NGS R 5/10 n ASH700228D 1508 IGS R 4/21 y NGS R 4/21 n TPSHIPER_PLUS IGS CN 3/x n NGS CN 3/x n ASH A 8055 IGS CN 3/x n NGS CN 3/x n ASH A 5668 IGS CN 3/x n NGS CN 3/x n ASH A 8286 IGS CN 3/x n NGS CN 3/x n ASH A 8285 IGS CN 3/x n NGS CN 3/x n ASH A 5679 IGS CN 3/x n NGS CN 3/x n ASH A 8059 IGS CN 3/x n NGS CN 3/x n Calibration type: R robot Geo++ GmbH; CN Field NGS, converted from relative NGS antenna calibrations; 2 NoA/NoC: Number of Calibrated Antennas / Number of Individual Calibrations; 3 Azi: (y) AZImuth dependent phase pattern values available; (n) not available; 4 x data not available. Wyniki testów polowych 2/3 Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
23 Centra fazowe Wyniki testów polowych 3/3 Antenna S/N origin Type 1 NoA/ All values are given in [mm] Azi NoC 2 dn de du STD N STD E STD U ASH A rot. 180º 5679 IGS CN 3/x n NGS CN 3/x n ASH700718B IGS R 8/22 y NGS R 8/22 n ASH A 1 IGS CN 2/x n NGS CN 2/x n ASH A 2 IGS CN 2/x n NGS CN 2/x n AERAT2775_ IGS CN 3/x n NGS CN 3/x n AERAT2775_ IGS CN 3/x n NGS CN 3/x n JNSMARANT_GGD 1791 IGS CN 3/x n NGS CN 3/x n JNSMARANT_GGD 1 IGS CN 3/x n NGS CN 3/x n JAV_TRIUMPH IGS x x x x x x x x x NGS CN 3/x n AERAT1675_ IGS x x x x x x x x x NGS CN 3/x n Calibration type: R robot Geo++ GmbH; CN Field NGS, converted from relative NGS antenna calibrations; 2 NoA/NoC: Number of Calibrated Antennas / Number of Individual Calibrations; 3 Azi: (y) AZImuth dependent phase pattern values available; (n) not available; 4 x data not available. Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
24 Wnioski Przeprowadzone pierwsze testy potwierdziły występowanie problemu dokładności modeli PCV wykorzystywanych w precyzyjnych pomiarach satelitarnych. Dokładność modeli centrów fazowych anten GNSS przeliczanych z kalibracji absolutnych jest często niezadowalająca. Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
25 Modelowanie jonosfery Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
26 Modelowanie jonosfery Strona www serwisu monitorowania jonosfery nad Polską Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
27 Modelowanie jonosfery Włączenie danych ze stacji zagranicznych LATPOS + LITPOS ASG-EUPOS + EPN ASG-EUPOS + EPN + LITPOS + LATPOS 60 N 60 N 50 N 50 N 40 N 40 N 0 10 E 20 E 30 E 40 E 0 10 E 20 E 30 E 40 E Porównanie rozmieszczenia stacji ASG-EUPO, EPN, LITPOS i LATPOS Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
28 Modelowanie jonosfery Błąd kolokacji najmniejszych kwadratów wynikający z estymowanego błędu a priori i rozmieszczenia danych Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
29 Wnioski Włączenie dodatkowych obserwacji ze stacji LATPOS i LITPOS poprawia kompletność i dokładność map jonosfery. Planowane jest włączenie danych konstelacji GLONASS i Galielo oraz rozszerzenie modelu na obszar Europy. Uniwersytet Warmińsko-Mazurski w Olsztynie Instytut Geodezji
30 Główne zadania badawcze 1. System estymacji TD z obserwacji GNSS model IGGHZ-G; 2. System estymacji TD z naziemnych obserwacji meteorologicznych model IGGHZ-M; 3. Integracja modeli troposfery uzyskanych z danych GNSS i meteorologicznych z Numerycznymi Modelami Prognozy Pogody; 4. Doskonalenia metod pozycjonowania satelitarnego GNSS w czasie rzeczywistym GNSS-WARP - autorskie oprogramowanie PPP;
31 System estymacji TD z obserwacji GNSS model IGGHZ-G
32 Model IGGHZ-G - System estymacji ZTD z obserwacji GNSS
33 Model stanu atmosfery w IGiG E-GVAP: EUMETNET EIG GNSS Water VApor Programme IGiG udostępnia dane ZTD dla ~120 stacji od kwietnia 2012.
34 E-GVAP - The EUMETNET EIG GNSS water vapour programme
35 Zewnętrzna weryfikacja ZTD i poprawa systemu (ZTD) 10 mm ~ (IWV) 1-2 kg/m 2 Bosy J., Kapłon J., Rohm W., Sierny J., Wilgan K., Hadaś T, Kroszczyński K. (2013): Zintegrowany model troposfery z obserwacji GNSS i meteorologicznych. Konferencja Sekcji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych Polskiej Akademii Nauk "Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji", Kraków,
36 Zewnętrzna weryfikacja ZTD i poprawa systemu Okno 1-no godzinne Okno 12-to godzinne Porównanie do: EPN combined WAT Rapid EPN combined WAT Rapid Okres obserwacji ( ) Przesunięcie (bias) Odchylenie standardowe Statystyka porównania rozwiązań ZTD NRT IGGHZG oraz WAT Rapid. Prostokąt oznacza odchylenie standardowe ZTD, linia przerywana zakres uzyskanych wartości Bosy J., Kapłon J., Rohm W., Sierny J., Wilgan K., Hadaś T, Kroszczyński K. (2013): Zintegrowany model troposfery z obserwacji GNSS i meteorologicznych. Konferencja Sekcji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych Polskiej Akademii Nauk "Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji", Kraków,

37 Model IGGHZ-G - Ocena dokładności

38 Model IGGHZ-G - Ocena dokładności
39 Model IGGHZ-G - Porównanie IWV z modelami COAMPS i HIRLAM
40 Model IGGHZ-G
41 System estymacji TD z naziemnych obserwacji meteorologicznych model IGGHZ-M
42 Model IGGHZ-M
43 Model IGGHZ-M
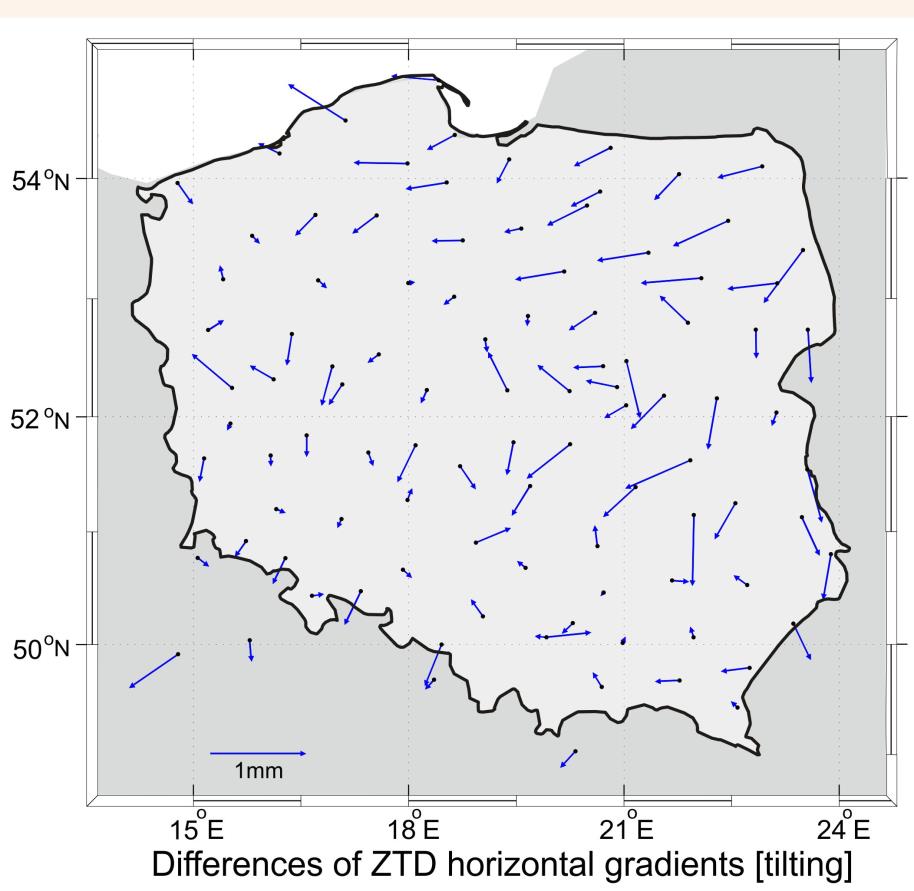
44 Rozkład 2D + T zawartości pary wodnej (IWV) POTS DRES LDB2 SASS GWWL REDZ BOR1 WROC BYDG LODZ LAMA BOGO BOGI JOZ2 JOZE SWKI BPDL WARN CLIB -2 KATO GOPE KRA1-3 KRAW CPAR WTZR USDL CFRM [kg/m2] POTS DRES LDB2 SASS GWWL REDZ BOR1 WROC BYDG LAMA SWKI BOGO BOGI JOZ2 LODZ JOZE BPDL WARN CLIB -2 KATO GOPE KRAW KRA1-3 CPAR WTZR USDL -4 CFRM [kg/m2] Visualization of 2D IWV distribution over Poland
45 Integracja modeli troposfery uzyskanych z danych GNSS i meteorologicznych z Numerycznymi Modelami Prognozy Pogody
46 Zintegrowany model stanu atmosfery w IGiG
47 Zintegrowany model stanu atmosfery w IGiG

48 Modele atmosfery - RMSE dla ciśnienia i temperatury
49 Błędy ZHD na stacjach ASG-EUPOS
50 ZTD (IGGHZ-G vs COAMPS)
51 ZTD (IGGHZ-G vs RS)
52 Radiosondaż minus GNSS-RO Zakres Refrakcyjność Ciśnienie Temperatura No obs. 0-30km 0:04 (3:94) 1:11 (2:56) 0:12 (3:59) 646
53 Radiosondaż kryterium przestrzenne i czasowe
54 e, RH, T, p (AWS vs COAMPS)
55 e, T, p, ZTD (RS vs COAMPS)
56 Błędy PW na stacjach ASG-EUPOS

57 Zintegrowany model stanu atmosfery w IGiG
58 Tomografia (1): obserwacje syntetyczne SWD 10 6 N Obserwacje Niewiadome w d Macierz planu Rohm W., Bosy J. Local tomography troposphere model over mountains area Atmospheric Research, Vol. 93 No. 4, 2009, pp
59 Tomografia (1): obserwacje syntetyczne Rohm W., Bosy J. Local tomography troposphere model over mountains area Atmospheric Research, Vol. 93 No. 4, 2009, pp
60 Tomografia (2): pierwsza implementacja SWD 10 6 Macierz planu Rozwiązanie satysfakcjonujące dla pierwszej implementacji N w s Dopasowanie równań ograniczających zmienność refrakcyjności w zależności od wysokości Rohm W., Bosy J. The verification of GNSS tropospheric tomography model in a mountainous area Advances in Space Research, Vol. 47 No. 10, 2011, pp
61 Tomografia (2): pierwsza implementacja (sf) Usuwanie wpływu troposfery poza modelem tomograficznym Rohm W., Bosy J. The verification of GNSS tropospheric tomography model in a mountainous area Advances in Space Research, Vol. 47 No. 10, 2011, pp
62 Tomografia (2): pierwsza implementacja Rohm W., Bosy J. The verification of GNSS tropospheric tomography model in a mountainous area Advances in Space Research, Vol. 47 No. 10, 2011, pp
63 Tomografia (3): model NRT Dodanie do układu obserwacyjnego modelu zewnętrznego (zielony kolor) Implementacja filtru Kalmana Bosy J., Kapłon J., Rohm W., Sierny J., Hadaś T. Near real-time estimation of water vapour in the troposphere using ground GNSS and the meteorological data Annales Geophysicae, Vol. 30 No., Göttingen, Germany 2012, pp

64 Tomografia (3): model NRT Dodanie do układu obserwacyjnego modelu zewnętrznego (zielony kolor) Implementacja filtru Kalmana Zakres działania rozszerzony na obszar Polski Bosy J., Kapłon J., Rohm W., Sierny J., Hadaś T. Near real-time estimation of water vapour in the troposphere using ground GNSS and the meteorological data Annales Geophysicae, Vol. 30 No., Göttingen, Germany 2012, pp
65 Tomografia (3): model NRT Redukcja szumów pomiarowych konieczna duża czułość na błędy przypadkowe i systematyczne w obserwacjach Bosy J., Kapłon J., Rohm W., Sierny J., Hadaś T. Near real-time estimation of water vapour in the troposphere using ground GNSS and the meteorological data Annales Geophysicae, Vol. 30 No., Göttingen, Germany 2012, pp
66 Tomografia (4): RKF SWD N wapriori A A apriori inner A A outer apriori_ outer Nw v No w Model funkcjonalny Jakość bez tomografii równań z ograniczających obserwacji syntetycznych 1mm/km Dolna część troposfery do Model wysokości stochastyczny 1.5km szumu procesu problematyczna ze względu T T R 1 Kna Pmałą k ( ) Ailość k ( A przecięć kpk ( ) Ak Rk ) sygnałów R diag ( p,..., p R k p p i Implementacja dla potrzeb SPACE RMIT w Australii P k ( ) k Pk 1 q ( ) t e T 2 m, i 1 e h, i 1 for c p pi r i 1 m) c ri p c for ri p 2 l, o o Zysk Kalmana (K) wyznaczony iteracyjnie ze względu na szum obserwacji q T k Q Jakość tomografii z obserwacji Q diag ( q1, i qm, iq1, o... ql, o) rzeczywistych ~6 mm/km Rohm W., Zhang K., Bosy, J. Limited constraint, robust Kalman filtering for GNSS troposphere tomography Atmospheric Measurement Techniques, Vol. 7 No. 5, 2014, pp k
67 Doskonalenia metod pozycjonowania satelitarnego GNSS w czasie rzeczywistym: GNSS-WARP - autorskie oprogramowanie PPP
68 GNSS-WARP - autorskie oprogramowanie PPP PPP Czas rzeczywisty Troposfera GNSS-WARP (Wroclaw Algorithms for Real-time Positioning) Funkcjonalność autorskie oprogramowanie z oryginalnymi algorytmami; zaimplementowany od podstaw w środowisku Matlab; przetwarzanie danych w czasie rzeczywistym (0.1Hz) i postprocessingu; aplikacja i synchronizacja poprawek SSR z IGS RTS gotowość na Multi-GNSS (aktualnie GPS i GLONASS) empiryczne i zewnętrzne modele opóźnienia troposferycznego i funkcje mapujące wizualizacja wyników i wartości parametrów (także w czasie rzeczywistym)
, stacja WROC, DOY 114, 2014 inicjalizację rozwiązania: 1h dla GPS i 15min dla GPS+GLO dokładność: 3cm dla N,E, 12cm dla")
69 GNSS-WARP aplikacje (1) Pozycjonowanie kinematyczne czasu rzeczywistego z produktami IGS RTS Szeregi czasowe rezyduów i błędów dla GPS (strumień IGS02) i GPS+GLONASS (strumień IGS03), stacja WROC, DOY 114, 2014 inicjalizację rozwiązania: 1h dla GPS i 15min dla GPS+GLO dokładność: 3cm dla N,E, 12cm dla U
70 Strategia standardowa Z modelem regionalnym GNSS-WARP aplikacje (2) Aplikacja regionalnego modelu troposfery do kinematycznego pozycjonowania real-time Wyniki rozwiązania kinematycznego GPS bez (po lewej) i z (po prawej) wykorzystaniem modelu NRT-ZTD, stacja WROC, DOY 116, 2014 mniejsze rezydua (<15cm) i estymowany błąd dla składowej wysokościowej szybsze zbieganie rozwiązania (bez stosowania technik wyznaczania nieoznaczoności)
71 GNSS-WARP aplikacje (3) Estymacja opóźnienia troposferycznego w czasie rzeczywistym ZTD czasu rzeczywistego (zielony) i jego błąd (niebieski) w porównaniu do EPN ZTD final (czerwone), stacja WROC, DOY , 2014 Interwał: 10s Rezydua: μ=-2.5, σ=11.2 Średni błąd estymacji: 9mm
 operacyjnie od 2013 roku; 3.")
72 Projekty badawcze 1. NCN PRELUDIUM: Doskonalenie metod precyzyjnego pozycjonowania satelitarnego GNSS w czasie rzeczywistym, (Tomasz Hadaś, UPWr), ; 2. E-GVAP - The EUMETNET EIG GNSS water vapour programme, (Jan Kapłon UPWr) operacyjnie od 2013 roku; 3. COST ES1206: Advanced Global Navigation Satellite Systems tropospheric products for monitoring severe weather events and climate (GNSS4SWEC) (Jarosław Bosy UPWR, Karolina Szafranek WAT, Paweł Wielgosz UWM), ; 4. ESA Contract: Precise Ionospheric Modelling for Improved GNSS Positioning in Poland (Paweł Wielgosz UWM, Jarosław Bosy UPWr, Manuel Hernandez Pajares UPC) ; 5. NCN SONATA: Opracowanie metodologii asymilacji naziemnych obserwacji GNSS w celu poprawy jakości numerycznych prognoz pogody (Witold Rohm, UPWr,. UWr), ; 6. NCN PRELUDIUM: Ocena wpływu wykorzystania zaawansowanych metod modelowania opóźnienia troposferycznego sygnałów GNSS na estymowane parametry troposfery oraz realizację systemu ETRS89 przez stacje ASG-EUPOS, (Katarzyna Stępniak, UWM), ; 7. NCN OPUS: Nowe metody precyzyjnego modelowania jonosfery oparte na opracowaniu absolutnych obserwacji fazowych sygnałów GNSS oraz pomiarów okultacyjnych. (Paweł Wielgosz, UWM), ; 8. ESA Contract: Higher Order Ionospheric modelling campaigns for precise GNSS applications - HORION (Macin Puciłowski Leica, Jarosław Bosy UPWr, Paweł Wielgosz UWM, Manuel Hernandez Pajares UPC) ;

73 Podsumowanie 1. System stacji referencyjnych GNSS stanowi obecnie podstawę do budowy aplikacji działających w czasie rzeczywistym w różnych obszarach; 2. Jakość NWP jest niewystarczająca na potrzeby precyzyjnego pozycjonowania, ale rozdzielczość modelu jest na tyle wysoka, że warto go poprawiać. 3. Pozycjonowanie GNSS metodą względną i absolutną (PPP) daje obecnie większą stabilność rozwiązania przy wykorzystaniu zewnętrznych modeli jonosfery i troposfery. 4. Aktualnie prowadzone badania związane są z tworzeniem aplikacji Multi-GNSS i działających w czasie rzeczywistym, co wiąże się większymi wymaganiami stawianymi systemom stacji referencyjnych GNSS.


74 Dziękujemy za uwagę Jarosław Bosy Paweł Wielgosz
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej
 Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
Modelowanie stanu atmosfery z obserwacji GNSS i meteorologicznych
 Modelowanie stanu atmosfery z obserwacji GNSS i meteorologicznych Jarosław BOSY (1) Witold ROHM (1,2) Jan KAPŁON (1) Jan SIERNY(1) Tomasz HADAŚ (1) Karina WILGAN (1) (1) Uniwersytet Przyrodniczy we Wrocławiu
Modelowanie stanu atmosfery z obserwacji GNSS i meteorologicznych Jarosław BOSY (1) Witold ROHM (1,2) Jan KAPŁON (1) Jan SIERNY(1) Tomasz HADAŚ (1) Karina WILGAN (1) (1) Uniwersytet Przyrodniczy we Wrocławiu
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS
 Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych
 Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
AKTUALNY STAN REALIZACJI PROJEKTU ASG+
 AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Aktualne produkty jonosferyczne dla GNSS
 Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
Analiza IWV wyznaczonego z wysoką rozdzielczością czasową z obserwacji GNSS w programie G-Nut/Tefnut case study
 Analiza IWV wyznaczonego z wysoką rozdzielczością czasową z obserwacji GNSS w programie G-Nut/Tefnut case study Paweł GOŁASZEWSKI*, Paweł WIELGOSZ, Katarzyna STĘPNIAK Uniwersytet Warmińsko-Mazurski w Olsztynie
Analiza IWV wyznaczonego z wysoką rozdzielczością czasową z obserwacji GNSS w programie G-Nut/Tefnut case study Paweł GOŁASZEWSKI*, Paweł WIELGOSZ, Katarzyna STĘPNIAK Uniwersytet Warmińsko-Mazurski w Olsztynie
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
Przedstawiona rozprawa doktorska stanowi spójny tematycznie zbiór trzech artykułów opublikowanych w czasopismach naukowych:
 Dr hab. inż. Paweł Wielgosz, prof. UWM Instytut Geodezji Wydział Geodezji, Inżynierii Przestrzennej i Budownictwa Uniwersytet Warmińsko-Mazurski w Olsztynie Olsztyn, 20.06.2015r. Recenzja rozprawy doktorskiej
Dr hab. inż. Paweł Wielgosz, prof. UWM Instytut Geodezji Wydział Geodezji, Inżynierii Przestrzennej i Budownictwa Uniwersytet Warmińsko-Mazurski w Olsztynie Olsztyn, 20.06.2015r. Recenzja rozprawy doktorskiej
SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS
 II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Estymacja opóźnienia troposferycznego z obserwacji GNSS na potrzeby meteorologii i pozycjonowania GNSS
 Seminarium Współczesne problemy podstawowych osnów geodezyjnych w Polsce Grybów, 14-16 września 2016 r. Estymacja opóźnienia troposferycznego z obserwacji GNSS na potrzeby meteorologii i pozycjonowania
Seminarium Współczesne problemy podstawowych osnów geodezyjnych w Polsce Grybów, 14-16 września 2016 r. Estymacja opóźnienia troposferycznego z obserwacji GNSS na potrzeby meteorologii i pozycjonowania
1. (2015) 156, 29-42, IF=3.377,
 156, 29-42, IF=3.377,") Streszczenie rozprawy doktorskiej stanowiącej spójnie tematycznie zbiór czterech artykułów opublikowanych lub przyjętych do druku w czasopismach naukowych 1. Wilgan K, Rohm W, Bosy J (2015) Multi-observation
Streszczenie rozprawy doktorskiej stanowiącej spójnie tematycznie zbiór czterech artykułów opublikowanych lub przyjętych do druku w czasopismach naukowych 1. Wilgan K, Rohm W, Bosy J (2015) Multi-observation
Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju
 Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Centrum Badań Kosmicznych PAN, Warszawa Stanisław
Integracja stacji referencyjnych systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Centrum Badań Kosmicznych PAN, Warszawa Stanisław
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
AUTOREFERAT DR INŻ. JACEK PAZIEWSKI OLSZTYN 2017
 AUTOREFERAT DR INŻ. JACEK PAZIEWSKI OLSZTYN 2017 Spis treści 1. IMIĘ I NAZWISKO... 3 2. POSIADANE DYPLOMY STOPNIE NAUKOWE... 3 3. INFORMACJE O DOTYCHCZASOWYM ZATRUDNIENIU W JEDNOSTKACH NAUKOWYCH... 3 4.
AUTOREFERAT DR INŻ. JACEK PAZIEWSKI OLSZTYN 2017 Spis treści 1. IMIĘ I NAZWISKO... 3 2. POSIADANE DYPLOMY STOPNIE NAUKOWE... 3 3. INFORMACJE O DOTYCHCZASOWYM ZATRUDNIENIU W JEDNOSTKACH NAUKOWYCH... 3 4.
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
ASG EUPOS w państwowym systemie odniesień przestrzennych
 ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
Przedstawiona rozprawa doktorska stanowi spójny tematycznie zbiór czterech artykułów opublikowanych w recenzowanych czasopismach naukowych:
 Dr hab. inż. Paweł Wielgosz, prof. UWM Instytut Geodezji Wydział Geodezji, Inżynierii Przestrzennej i Budownictwa Uniwersytet Warmińsko-Mazurski w Olsztynie Olsztyn, 27.06.2017r. Recenzja rozprawy doktorskiej
Dr hab. inż. Paweł Wielgosz, prof. UWM Instytut Geodezji Wydział Geodezji, Inżynierii Przestrzennej i Budownictwa Uniwersytet Warmińsko-Mazurski w Olsztynie Olsztyn, 27.06.2017r. Recenzja rozprawy doktorskiej
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM
 ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
ZAŁOŻENIA BUDOWY MODUŁÓW OPRACOWANIA SIECI ASG-EUPOS I MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SYSTEMU W CZASIE PRAWIE-RZECZYWISTYM Figurski M., Szafranek K., Araszkiewicz A., Szołucha M. Realizacja grantu
Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego
 Bi u l e t y n WAT Vo l. LXI, Nr 1, 2012 Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego Katarzyna
Bi u l e t y n WAT Vo l. LXI, Nr 1, 2012 Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego Katarzyna
Moduł modelowania i predykcji stanu jonosfery
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduł modelowania i predykcji stanu jonosfery A. Krankowski, A. Drożyner, R. Sieradzki
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduł modelowania i predykcji stanu jonosfery A. Krankowski, A. Drożyner, R. Sieradzki
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS
 Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK
 Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Uniwersytet Przyrodniczy we Wrocławiu Instytut Geodezji i Geoinformatyki. Zastosowanie techniki GPS w badaniu troposfery
 Uniwersytet Przyrodniczy we Wrocławiu Instytut Geodezji i Geoinformatyki Zastosowanie techniki GPS w badaniu troposfery Witold Rohm witold.rohm@kgf.ar.wroc.pl Techniki badania troposfery pomiary naziemne
Uniwersytet Przyrodniczy we Wrocławiu Instytut Geodezji i Geoinformatyki Zastosowanie techniki GPS w badaniu troposfery Witold Rohm witold.rohm@kgf.ar.wroc.pl Techniki badania troposfery pomiary naziemne
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ
 WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
R E C E N Z J A. rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality of precise point positioning method
 dr hab. inż. Ryszard Szpnuar Politechnika Warszawska Katedra Geodezji i Astronomii Geodezyjnej R E C E N Z J A rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality
dr hab. inż. Ryszard Szpnuar Politechnika Warszawska Katedra Geodezji i Astronomii Geodezyjnej R E C E N Z J A rozprawy doktorskiej mgr inż. Jakuba Kality pt: Analysis of factors that influence the quality
Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska
 UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89
 Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89 Tomasz Liwosz 1, Marcin Ryczywolski 1,2 1 Politechnika Warszawska 2 Główny Urząd Geodezji i Kartografii Seminarium Współczesne problemy podstawowych
Podstawowa osnowa trójwymiarowa jako realizacja ETRS-89 Tomasz Liwosz 1, Marcin Ryczywolski 1,2 1 Politechnika Warszawska 2 Główny Urząd Geodezji i Kartografii Seminarium Współczesne problemy podstawowych
Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju
 Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Kampania
Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Kampania
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
Rok akademicki: 2018/2019 Kod: DGI s Punkty ECTS: 4. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Numeryczne opracowanie obserwacji GNSS Rok akademicki: 2018/2019 Kod: DGI-1-616-s Punkty ECTS: 4 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Geoinformacja Specjalność: Poziom
Nazwa modułu: Numeryczne opracowanie obserwacji GNSS Rok akademicki: 2018/2019 Kod: DGI-1-616-s Punkty ECTS: 4 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Geoinformacja Specjalność: Poziom
Podstawą formalną recenzji jest pismo Pana Dziekana Wydziału Inżynierii Lądowej i Geodezji Wojskowej Akademii Technicznej z dnia 7 stycznia 2016 r.
 Dr hab. inż. Paweł Wielgosz, prof. UWM Instytut Geodezji Wydział Geodezji, Inżynierii Przestrzennej i Budownictwa Uniwersytet Warmińsko-Mazurski w Olsztynie Olsztyn, 7.02.2016r. Recenzja rozprawy doktorskiej
Dr hab. inż. Paweł Wielgosz, prof. UWM Instytut Geodezji Wydział Geodezji, Inżynierii Przestrzennej i Budownictwa Uniwersytet Warmińsko-Mazurski w Olsztynie Olsztyn, 7.02.2016r. Recenzja rozprawy doktorskiej
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Korzyści wynikające ze wspólnego opracowania. z wynikami uzyskanymi techniką GNSS
 Korzyści wynikające ze wspólnego opracowania wyników pomiarów PSInSAR z wynikami uzyskanymi techniką GNSS Łukasz Żak, Jan Kryński, Dariusz Ziółkowski, Jan Cisak, Magdalena Łągiewska Instytut Geodezji i
Korzyści wynikające ze wspólnego opracowania wyników pomiarów PSInSAR z wynikami uzyskanymi techniką GNSS Łukasz Żak, Jan Kryński, Dariusz Ziółkowski, Jan Cisak, Magdalena Łągiewska Instytut Geodezji i
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Precyzyjne pozycjonowanie multi-gnss, meteorologia GNSS oraz modelowanie orbit Galileo w grupie badawczej GNSS&Meteo UP we Wrocławiu
 SPOTKANIE SPECJALNE ZESPOŁU DS. SYSTEMU GALILEO KOMITETU BADAŃ KOSMICZNYCH I SATELITARNYCH PAN 12 MAJA 2017 R., WARSZAWA Precyzyjne pozycjonowanie multi-gnss, meteorologia GNSS oraz modelowanie orbit Galileo
SPOTKANIE SPECJALNE ZESPOŁU DS. SYSTEMU GALILEO KOMITETU BADAŃ KOSMICZNYCH I SATELITARNYCH PAN 12 MAJA 2017 R., WARSZAWA Precyzyjne pozycjonowanie multi-gnss, meteorologia GNSS oraz modelowanie orbit Galileo
Ultra szybkie statyczne pozycjonowanie gnss z zastosowaniem systemów GPS i Galileo
 Bi u l e t y n WAT Vo l. LXIII, Nr 2, 214 Ultra szybkie statyczne pozycjonowanie gnss z zastosowaniem systemów GPS i Galileo Jacek Paziewski, Marta Krukowska Uniwersytet Warmińsko-Mazurski, Wydział Geodezji
Bi u l e t y n WAT Vo l. LXIII, Nr 2, 214 Ultra szybkie statyczne pozycjonowanie gnss z zastosowaniem systemów GPS i Galileo Jacek Paziewski, Marta Krukowska Uniwersytet Warmińsko-Mazurski, Wydział Geodezji
Wojskowa Akademia Techniczna ** Hertz Systems Ltd. Sp. z o. o. *** Główny Urząd Geodezji i Kartografii
 System ASG-EUPOS w zastosowaniach cywilnych i militarnych Mariusz Figurski *, Marcin Szołucha**, Jarosław Bosy *** * Wojskowa Akademia Techniczna ** Hertz Systems Ltd. Sp. z o. o. *** Główny Urząd Geodezji
System ASG-EUPOS w zastosowaniach cywilnych i militarnych Mariusz Figurski *, Marcin Szołucha**, Jarosław Bosy *** * Wojskowa Akademia Techniczna ** Hertz Systems Ltd. Sp. z o. o. *** Główny Urząd Geodezji
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
TECHNOLOGIE. a jedynie w celach kontrolnych dla metody
 Obliczenia dla pomiarów statycznych GPS z wykorzystaniem systemu EPN AktyWNIE i wirtualnie z EUREF Po wydaniu milionów na system ASG-EUPOS z GUGiK wychodzą zalecenia kupowania wyłącznie drogich odbiorników
Obliczenia dla pomiarów statycznych GPS z wykorzystaniem systemu EPN AktyWNIE i wirtualnie z EUREF Po wydaniu milionów na system ASG-EUPOS z GUGiK wychodzą zalecenia kupowania wyłącznie drogich odbiorników
Recenzja Rozprawy doktorskiej mgr int Pawła Przestrzelskiego pt.: Sieciowe pozycjonowanie różnicowe z wykorzystaniem obserwacji GPS i GLONASS"
 *jp"
*jp"
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Olsztyn, 10-11 października 2013 r.
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Olsztyn, 10-11 października 2013 r.
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
Współczesne problemy sieci geodezyjnych Problem aktualności współrzędnych katalogowych ASG-EUPOS
 Współczesne problemy sieci geodezyjnych G r y b ó w, 1 8-2 0 p a ź d z i e r n i k a 2 0 1 2 r. Problem aktualności współrzędnych katalogowych ASG-EUPOS Karolina Szafranek, Mariusz Figurski Plan prezentacji
Współczesne problemy sieci geodezyjnych G r y b ó w, 1 8-2 0 p a ź d z i e r n i k a 2 0 1 2 r. Problem aktualności współrzędnych katalogowych ASG-EUPOS Karolina Szafranek, Mariusz Figurski Plan prezentacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
Lp. Promotor Temat Dyplomant 1. Dr inż. A. Dumalski. Badanie dokładności użytkowej niwelatora cyfrowego 3. Dr inż. A. Dumalski
 2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
2009/2010 propozycje tematów prac dyplomowych na studiach stacjonarnych magisterskich II stopnia realizowanych w Instytucie Geodezji Specjalność geodezja gospodarcza Olsztyn Limit 18 Lp. Promotor Temat
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
OCENA STOPNIA INTEGRACJI POLSKICH STACJI REFERENCYJNYCH SYSTEMU ASG-EUPOS Z WYBRANYMI STACJAMI W STREFIE PRZYGRANICZNEJ
 Współczesne problemy podstawowych osnów geodezyjnych w Polsce Grybów, 14-16 września 2016 r. OCENA STOPNIA INTEGRACJI POLSKICH STACJI REFERENCYJNYCH SYSTEMU ASG-EUPOS Z WYBRANYMI STACJAMI W STREFIE PRZYGRANICZNEJ
Współczesne problemy podstawowych osnów geodezyjnych w Polsce Grybów, 14-16 września 2016 r. OCENA STOPNIA INTEGRACJI POLSKICH STACJI REFERENCYJNYCH SYSTEMU ASG-EUPOS Z WYBRANYMI STACJAMI W STREFIE PRZYGRANICZNEJ
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Jan Kapłon, Tomasz Hadaś, Jarosław Bosy, Kamil Kaźmierski
 Rozwój Rozwójserwisów serwisówczasu czasurzeczywistego rzeczywistego opartych opartychootechniki technikisatelitarne satelitarnemulti-gnss Multi-GNSS Jan Kapłon, Tomasz Hadaś, Jarosław Bosy, Kamil Kaźmierski
Rozwój Rozwójserwisów serwisówczasu czasurzeczywistego rzeczywistego opartych opartychootechniki technikisatelitarne satelitarnemulti-gnss Multi-GNSS Jan Kapłon, Tomasz Hadaś, Jarosław Bosy, Kamil Kaźmierski
Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA......
 Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:...... Lp. Parametry wymagane: Parametry
Sprawa Nr: RAP.272.45.2012 Załącznik Nr 3 do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:...... Lp. Parametry wymagane: Parametry
Tel. (71) ,
 ,") Prof. dr hab. inż. Bernard Kontny Uniwersytet Przyrodniczy we Wrocławiu Wydział Inżynierii Kształtowania Środowiska i Geodezji Instytut Geodezji i Geoinformatyki Ul. Grunwaldzka 53, 50-357 Wrocław, Tel.
Prof. dr hab. inż. Bernard Kontny Uniwersytet Przyrodniczy we Wrocławiu Wydział Inżynierii Kształtowania Środowiska i Geodezji Instytut Geodezji i Geoinformatyki Ul. Grunwaldzka 53, 50-357 Wrocław, Tel.
Olsztyński Park Naukowo-Technologiczny Centrum Propagacji Fal Radiowych w Jonosferze
 Olsztyński Park Naukowo-Technologiczny Centrum Propagacji Fal Radiowych w Jonosferze wsparcie naukowe Uniwersytetu Warmińsko-Mazurskiego w Olsztynie Andrzej Krankowski, Wydział Geodezji i Gospodarki Przestrzennej,,
Olsztyński Park Naukowo-Technologiczny Centrum Propagacji Fal Radiowych w Jonosferze wsparcie naukowe Uniwersytetu Warmińsko-Mazurskiego w Olsztynie Andrzej Krankowski, Wydział Geodezji i Gospodarki Przestrzennej,,
Nazwa specjalności:geodezja gospodarcza, geodezja i technologie infprmatyczne, kataster nieruchomości, geodezja i nawigacja satelitarna
 TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2013/2014 Pełna nazwa jednostki: INSTYTUT GEODEZJI Nazwa specjalności:geodezja gospodarcza, geodezja i technologie
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2013/2014 Pełna nazwa jednostki: INSTYTUT GEODEZJI Nazwa specjalności:geodezja gospodarcza, geodezja i technologie
Serwisy postprocessingu POZGEO i POZGEO D
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista
 Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static
 Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
METEOROLOGIA GNSS. Modelowanie stanu troposfery z wykorzystaniem obserwacji GNSS i meteorologicznych.
 TOMASZ HADAŚ, JAROSŁAW BOSY, JAN KAPŁON, WITOLD ROHM, JAN SIERNY, KARINA WILGAN METEOROLOGIA GNSS. Modelowanie stanu troposfery z wykorzystaniem obserwacji GNSS i meteorologicznych. STRESZCZENIE: _Modelowanie
TOMASZ HADAŚ, JAROSŁAW BOSY, JAN KAPŁON, WITOLD ROHM, JAN SIERNY, KARINA WILGAN METEOROLOGIA GNSS. Modelowanie stanu troposfery z wykorzystaniem obserwacji GNSS i meteorologicznych. STRESZCZENIE: _Modelowanie
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Projekt GGOS PL. Jarosław BOSY. Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu
 Projekt GGOS PL Jarosław BOSY Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Seminarium KG PAN, Grybów 18-19 pażdziernika 2012r. 1/28 Global Earth Observation System of Systems
Projekt GGOS PL Jarosław BOSY Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Seminarium KG PAN, Grybów 18-19 pażdziernika 2012r. 1/28 Global Earth Observation System of Systems
Dokładność wyznaczenia prędkości europejskich stacji permanentnych EPN
 Dokładność wyznaczenia prędkości europejskich stacji permanentnych EPN Anna Kłos, Janusz Bogusz, Mariusz Figurski, Maciej Gruszczyński Wojskowa Akademia Techniczna 1/24 We współczesnej geodezji wiarygodne
Dokładność wyznaczenia prędkości europejskich stacji permanentnych EPN Anna Kłos, Janusz Bogusz, Mariusz Figurski, Maciej Gruszczyński Wojskowa Akademia Techniczna 1/24 We współczesnej geodezji wiarygodne
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i
 Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
prof. Cezary SPECHT Gdańsk r.
 prof. Cezary SPECHT Gdańsk 12.05.2018 r. OCENA osiągnięć naukowych dra inż. Tomasza Hadasia w związku z postępowaniem w sprawie nadania w/w stopnia doktora habilitowanego nauk technicznych w dyscyplinie
prof. Cezary SPECHT Gdańsk 12.05.2018 r. OCENA osiągnięć naukowych dra inż. Tomasza Hadasia w związku z postępowaniem w sprawie nadania w/w stopnia doktora habilitowanego nauk technicznych w dyscyplinie
Wpływ długości sesji pomiarowej na dokładność wyznaczania pozycji w pomiarach statycznych GPS
 Budownictwo i Architektura 12(4) (2013) 251-256 Wpływ długości sesji pomiarowej na dokładność wyznaczania pozycji w pomiarach statycznych GPS Katedra Geotechniki, Wydział Budownictwa i Architektury, Politechnika
Budownictwo i Architektura 12(4) (2013) 251-256 Wpływ długości sesji pomiarowej na dokładność wyznaczania pozycji w pomiarach statycznych GPS Katedra Geotechniki, Wydział Budownictwa i Architektury, Politechnika
ASG-EUPOS serwisy postprocessingu
 Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Realizacja projektu modernizacji podstawowej osnowy grawimetrycznej kraju
 Realizacja projektu modernizacji podstawowej osnowy grawimetrycznej kraju Jan Kryński 1), Marcin Barlik 2) 1) Instytut Geodezji i Kartografii 2) Katedra Geodezji i Astronomii Geodezyjnej Politechniki Warszawskiej
Realizacja projektu modernizacji podstawowej osnowy grawimetrycznej kraju Jan Kryński 1), Marcin Barlik 2) 1) Instytut Geodezji i Kartografii 2) Katedra Geodezji i Astronomii Geodezyjnej Politechniki Warszawskiej
ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji Szymon Wajda główny specjalista
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji Szymon Wajda główny specjalista
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12
 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG. Acta Scientifica Academiae Ostroviensis nr 30, 69-75
 Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Integracja stacji systemu ASG-EUPOS z podstawową osnową geodezyjną kraju
 Integracja stacji systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Porównanie i ocena wyników integracji podstawowej osnowy geodezyjnej na obszarze Polski ze stacjami referencyjnymi systemu ASG-EUPOS
Integracja stacji systemu ASG-EUPOS z podstawową osnową geodezyjną kraju Porównanie i ocena wyników integracji podstawowej osnowy geodezyjnej na obszarze Polski ze stacjami referencyjnymi systemu ASG-EUPOS
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Ocena wykorzystania algorytmów interpolacyjnych do redukcji ilości danych pozyskiwanych w sposób
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2011/2012 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Ocena wykorzystania algorytmów interpolacyjnych do redukcji ilości danych pozyskiwanych w sposób
Polska Kosmiczna Satelitarne Pozycjonowanie Precyzyjna Nawigacja - Mobilny Monitoring
 KONFERENCJA NAUKOWA Polska Kosmiczna Satelitarne Pozycjonowanie Precyzyjna Nawigacja - Mobilny Monitoring 4-5 września 2019 r. Dęblin, Cel konferencji: Wymiana doświadczeń z obszaru zastosowania nowoczesnych
KONFERENCJA NAUKOWA Polska Kosmiczna Satelitarne Pozycjonowanie Precyzyjna Nawigacja - Mobilny Monitoring 4-5 września 2019 r. Dęblin, Cel konferencji: Wymiana doświadczeń z obszaru zastosowania nowoczesnych
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Wpływ charakterystyki dokładnościowej korekt różnicowych na rozwiązanie modelu pozycjonowania GNSS-RTK
 Wpływ charakterystyki dokładnościowej korekt różnicowych na rozwiązanie modelu pozycjonowania GNSS-RTK Dominik Próchniewicz Wydział Geodezji i Kartografii Politechnika Warszawska d.prochniewicz@gik.pw.edu.pl
Wpływ charakterystyki dokładnościowej korekt różnicowych na rozwiązanie modelu pozycjonowania GNSS-RTK Dominik Próchniewicz Wydział Geodezji i Kartografii Politechnika Warszawska d.prochniewicz@gik.pw.edu.pl
Działalność polskich Centrów Analiz w zadaniach EUREF
 Działalność polskich Centrów Analiz w zadaniach EUREF T. Liwosz 1, A. Araszkiewicz 2, M. Figurski 2, K. Szafranek 2 1 Politechnika Warszawska 2 Wojskowa Akademia Techniczna Seminarium Realizacja osnów
Działalność polskich Centrów Analiz w zadaniach EUREF T. Liwosz 1, A. Araszkiewicz 2, M. Figurski 2, K. Szafranek 2 1 Politechnika Warszawska 2 Wojskowa Akademia Techniczna Seminarium Realizacja osnów
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
ZALECENIA TECHNICZNE
 GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
Temat pracy dyplomowej Promotor Dyplomant CENTRUM INŻYNIERII RUCHU MORSKIEGO. prof. dr hab. inż. kpt.ż.w. Stanisław Gucma.
 kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu
kierunek: Nawigacja, : Transport morski, w roku akademickim 2012/2013, Temat dyplomowej Promotor Dyplomant otrzymania 1. Nawigacja / TM 2. Nawigacja / TM dokładności pozycji statku określonej przy wykorzystaniu