Programowalne układy logiczne kod kursu: ETD Układy sekwencyjne W
|
|
|
- Judyta Barańska
- 6 lat temu
- Przeglądów:
Transkrypt


1 Programowalne układy logiczne kod kursu: ETD Układy sekwencyjne W mgr inż. Maciej Rudek
2 Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu (którymkolwiek) powoduje natychmiastową zmianę na wyjściu. Uściślając wyjście układu kombinacyjnego jest zależne tylko od bieżących stanów na wejściu. Istnieją trzy sposoby opisu układów kombinacyjnych: Przypisania ciągłe Wykorzystanie instrukcji procesu always Za pomocą funkcji i zdań.

3 Układy sekwencyjne - przypomnienie W układach sekwencyjnych stan na wyjściu układu zależeć będzie od stanu na wejściu oraz od poprzedniego stanu. Najczęściej jest on nazywany stanem wewnętrznym, którego stan został zapamiętany za pomocą zespołu rejestrów pełniących rolę pamięci.
4 Automaty, maszyna stanów Istnieją dwa formalne modele FSM: wyjście jest tylko funkcją stanu, wyjście opisywane razem ze stanem Moore a Automat Moore a: wyjścia automatu są jedynie funkcją stanu, logika kombinacyjna służy do generowania sygnałów wyjściowych na podstawie stanu automatu, oraz do określenia wejść przerzutników na podstawie stanu automatu i wejść do układu. opóźnienie jednego cyklu zegara między wejściem a wyjściem Y = f(s) 4
5 Automaty, maszyna stanów Istnieją dwa formalne modele FSM: wyjście jest funkcją wejścia i stanu, wyjście opisywane nad strzałką przejścia Mealy ego Automat Mealy ego: zarówno następny stan jak i wektor wyjść są funkcjami bieżącego stanu automatu oraz wektora wejść; automat Mealy ego synchroniczny wyposażony jest w przerzutniki wyjściowe, automat asynchr. natychmiast reaguje na zmianę sygnałów wejściowych. reaguje natychmiast, możliwość wystąpienia zakłóceń (wyścigi, hazardy) szerokość sygnału na wyjściach zależy od stanów wejściowych Y = f(s, x 0 x n ) 5
6 Automaty porównanie Istnieją dwa formalne modele FSM: Moore a wyjście jest tylko funkcją stanu, wyjście opisywane razem ze stanem Y = f(s) Mealy ego wyjście jest funkcją wejścia i stanu wyjście opisywane nad strzałką przejścia Y = f(s, x 0 x n ) 6
7 Automaty, maszyna stanów Automat Mealy a Stan wyjścia zależny od stanu automatu i wejścia Generalnie zawiera tylko parę stanów, mniej niż automat Moore a Wyjścia zmieniają się na zboczach zegara Szybsza reakcja na zmiany na wejściu automatu. Automat Moore'a Stan wyjścia zależny tylko od stanu automatu Zawiera więcej stanów niż automat Mealy a Zmiana stanu wyjścia powodowana jest przez zmianę stanu na wejściu po wykonaniu zadania z logiki automatu Automat Moore a potrzebuje więcej logiki dekodującej co powoduję dłuższą reakcję.
8 Jak działa automat Dzięki wykorzystaniu zespołu rejestrów np. typu flip-flop możliwe jest przechowywanie bieżącego stanu automatu. Logika kombinacyjna odpowiedzialna jest za wyliczenie kolejnego stanu automatu. A wyjście może być kombinacją sygnałów związanego z konkretnym stanem (automat Moore a) oraz dodatkowo stanem na wejściach (automat Mealy ego).
9 Automaty, maszyna stanów Układy sekwencyjne nazywane są także automatami skończonymi (Finite State Machnie FSM). Można wyszczególnić takie układy zgodnie z nastepującymi specyfikacjami: 3 procesy każdy z bloków modelowany jest osobno 2 procesy dwa pierwsze bloki są modelowane razem w jednym procesie 1 proces wszystkie bloki można zamodelować jako jeden proces 9
10 Przykładowy graf przejść Stan bieżący Stan następny Wyjśc ie (Y) X = 0 X = 1 S0 S0 S1 0 S1 S1 S2 1 S2 S2 S3 0 S3 S0 S1 1
11 Automat w 3-ch procesach

12 Automat w 3-ch procesach

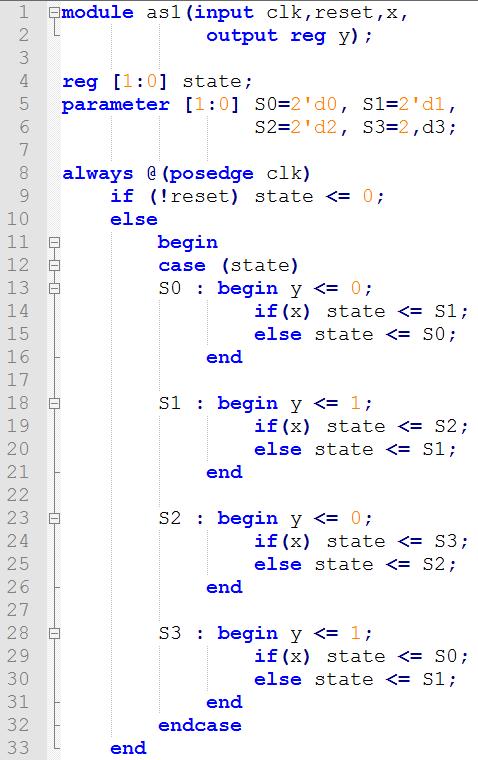
13 Automat w 3-ch procesach
14 Automat w 2-ch procesach
15 Automat z 1-procesem

16 Porównanie 3-ch automatów Dwa pierwsze automaty niewiele różnią się w swojej konstrukcji a ich implementacja jest taka sama. W ostatnim przypadku wygnał na wyjściu pojawi się w tym samym momencie do przejście do następnego stanu.

17 Automat Mealy ego Automat Mealy ego również można zamodelować używając 2. lub 3. procesów. Jednak używając tylko jednego, jest to całkowicie nie możliwe, ze względu na funkcję wyjścia która zależy od stanu i funkcji na wejściu.

18 Automat Mealy ego Poniżej przedstawiono graf przejść dla automatu Mealy ego. Wskazówka: Podczas implementacji tego rodzaju automatu łatwiej jest wykonać jego opis za pomocą dwóch procesów





19 Automat Mealy ego Dla tego przykładu została zastosowana definicja parametrów wykorzystując instrukcję localparam. W odróżnieniu do instrukcji parameter, localparam nie może zostać zmieniony z wykorzystaniem instrukcji defparam.

20 Niejawna specyfikacja automatu W instrukcji always zawarto trzy stany automatu stanu wykonywane w takiej kolejności w jakiej znajdują się w opisie, zgodnie z narastającym zboczem sygnału zegarowego. W pokazanym opisie został zawarty proces w którym następuje nieprzerwany przepływ informacji oraz wykonywanie poszczególnych operacji na nich.

21 Niejawna specyfikacja automatu Powyższa idea nosi nazwę cycle-accurate specyfication z dokładnością do cyklu zegara lub scheduled behavior zachowania szeregowego. Co ile taktów zegara obliczane jest wyjście dataout? Uwaga: struktura ta jest często nie syntezowalna przez narzędzia XST.


22 Potok W proponowanym przykładzie przedstawiono trzy stopnie proste automaty sekwencyjne. Co ile taktów zegara obliczane jest wyjście dataout?

23 23 Interfejsy komunikacyjne - na przykładzie ARM926

24 24 Interfejsy komunikacyjne - klasyfikacja ogólna



25 SerDes - Serializer/Deserializer Serializer/Deserializer jest to para połączonych ze sobą bloków w celu uzyskania szybkiej transmisji danych. Najczęściej są odpowiedzialne za konwertowanie danych z transmisji równoległej na szeregową oraz na odwrót. Może być stosowany w wielu różnych aplikacjach w celu minimalizacji ilości połączeń i kosztów oraz mniejszy poziom zakłóceń/szumów elektromagnetycznych.

26 SerDes - Serializer/Deserializer Na układ SerDes składają się dwa bloki Parallel In Serial Out (PISO) oraz Serial In Parallel Out (SIPO). Można wymienić 4 podstawowe architektury: Z linią zegarową Z wbudowanym zegarem Z kodowaniem 8b/10b Z przeplotem Oraz na 3 typy komunikacji: Simplex Half-Duplex Full-Duplex
27 Metody transmisji - w interfejsach szeregowych Typ transmisji Full-duplex Half-duplex Synchroniczna SPI, USART I 2 C Asynchroniczna UART, Ethernet CAN, USB, 1-Wire, LIN W transmisji synchronicznej równolegle z ciągiem bitów danych przesyła się sygnał synchronizujący, który określa chwile, w których stan linii danych odpowiada wartościom kolejnych bitów. W transmisji asynchronicznej przesyłane dane nie są związane z żadnym sygnałem synchronizującym, zegarowym. Pomiędzy nadajnikiem a odbiornikiem musi być ustalona częstotliwość przesyłania danych. 27
28 Sposoby transmisji

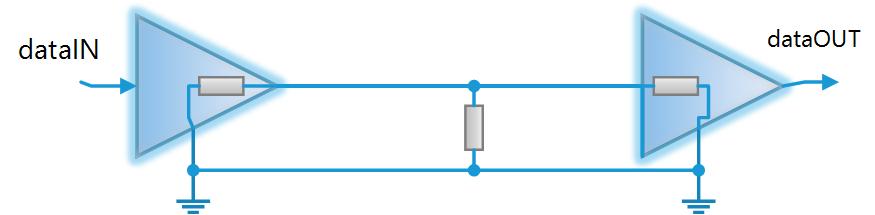
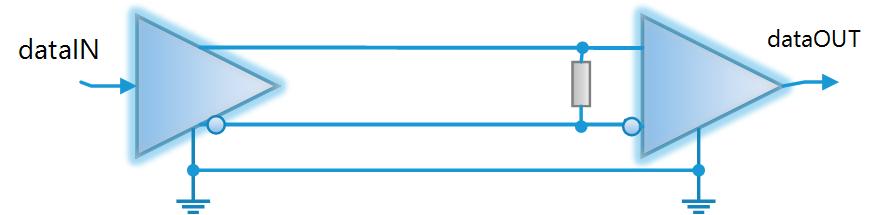
29 Sposoby transmisji - różnicowej
30 Sposoby transmisji - różnicowej Żródło:



31 Sposoby transmisji - różnicowej

32 SerDes z równoległym zegarem Ten system często stosowany jest w rozwiązaniach magistral typu: PCI, UTOPIA, w ukłądach procesorowych, kontrolnych itp. Przesyłanie danych, wspierane jest przez dodatkowy sygnał zegarowy, podawany równolegle z linią danych. Dzięki temu rozwiązaniu, można przesyłać dane na dużą odległość z dużą prędkością bez obaw o rozsynchronizowanie się transmisji.

33 Serdes z wewnętrznym zegarem W tym trybie dane są przesyłane tylko po jednej linii, niezbędne jest aby zapewnić odpowiednie warunki w celu odebrania danych: oba zegary nadajnika i odbiornika muszą działać na tych samych częstotliwościach oraz stosując bity synchronizacyjne bit stopu i startu czy dodatkowymi sygnałami kontrolnymi, ramką, synchronizacją, bitami statusu, bitami parzystości (CTR).



34 Serdes z wewnętrznym zegarem W tym trybie dane są przesyłane tylko po jednej linii, niezbędne jest aby zapewnić odpowiednie warunki w celu odebrania danych: oba zegary nadajnika i odbiornika muszą działać na tych samych częstotliwościach oraz stosując bity synchronizacyjne bit stopu i startu czy dodatkowymi sygnałami kontrolnymi, ramką, synchronizacją, bitami statusu, bitami parzystości (CTR).
35 Ten sposób przesyłania danych jest wykorzystywany w interfejsach wykorzystujących np.. pakietowanie np.: Ethernet, Fiber Channel, InfiniBand 8b/10b SerDes Przesyłanie 10-bitowej transmisji zostało opracowane przez IBM w latach 80-tych, gwarantując równoległa transmisję danych oraz kodowanie danych w celu zbalansowania ilości 1 do 0. Najdłuższa możliwa sekwencja 0 i 1 nie przekracza 5. Metoda ta jest pomocna podczas ograniczania widma sygnału szeregowego oraz na tłumienie emisji elektromagnetycznej transmitowanego sygnału, pozwalając na monitorowanie łącza komunikacji przez ograniczenie ilości kombinacji w 10-bitowym kodzie.

36 8b/10b schemat kodowania 7 H 6 G 5 F 4 E 3 D 2 C 1 B 0 A 9 j 8 h 7 g 6 f 5 i 4 e 3 d 2 c 1 b 0 a


37 Kody konwersji dla 5b/6b i 3b/4b



38 SerDes przesyłanie sygnału


39 Shift Register - SISO Rejestr przesuwny jest istotnym elementem wykorzystywanym do stworzenia układu transmisji danych. Wykorzystuje w swojej konstrukcji przerzutniki typu D połączonych w taki sposób, że dana jest przesuwana co cykl zegarowy. W tym wypadku co pozytywny takt zegarowy. SISO - rejestr z wyjściem i wejściem szeregowym (rejestr przesuwający) Co jest nie tak w tym układzie?


40 SIPO - wejście szeregowe, wyjście równoległe Dzięki temu układowi sekwencyjnemu, możliwe jest uzyskanie wyjścia równoległego z wejścia szeregowego. W podanym przykładzie, przesyłanie danych odbywa się na zbocze narastające sygnału CLK, a dane są wystawiane na wyjście w oddzielnym procesie. Co jest nie tak w tym układzie?


41 PISO - wejście równoległe, wyjście szeregowe
 - dane dla układu peryferyjnego MISO - (ang. Master Input Slave Output) - dane z układu peryferyjnego SCLK - (ang.")
42 Serial Peripherial Interface - SPI 42 SPI szeregowy interfejs komunikacyjny opracowany przez firmę Motorola: komunikacja dwukierunkowa (full-duplex), synchroniczna transmisja danych, master-slave, Interfejs trójprzewodowy, MOSI, MISO, SCLK MOSI - (ang. Master Output Slave Input) - dane dla układu peryferyjnego MISO - (ang. Master Input Slave Output) - dane z układu peryferyjnego SCLK - (ang. Serial CLocK) - sygnał zegarowy (taktujący) stosowany do transmisji danych pomiędzy układami peryferyjnymi np. przetworniki A/C, C/A, pamięci szeregowe, potencjometry cyfrowe, mikrokontrolery inna nazwa SSI - Synchronous Serial Interface

43 Serial Peripherial Interface SPI - możliwe połączenia z układami 43 Ogólna budowa interfejsu szeregowej transmisji danych SPI. Interfejs SPI składa się z dwóch rejestrów przesuwnych połączonych w licznik pierścieniowy i generatora sygnału taktującego. MISO wejście danych dla urządzenia master, a wyjściem dla slave, MOSI jest wyjściem dla urządzenia master, a wejściem dla slave. SCLK jest wejściem taktującym dla układu slave oraz wyjściem dla master. Sygnał taktujący jest zawsze generowany przez układ nadrzędny (master) bez względu na to czy dane są przez niego nadawane czy też odbierane. Sygnał taktujący jest nadawany jedynie podczas transmisji.
 wybiera poszczególne układy podrzędne")


44 Serial Peripherial Interface SPI - możliwe połączenia z układami Układy SPI połączone w magistrale liniową Układ nadrzędny (master) wybiera poszczególne układy podrzędne (slave) przez jedną z równoległych linii portu dołączonych do wyprowadzeń CS układów podrzędnych. Urządzenie slave zostanie wybrane, gdy na jego wejście SS zostanie podany określony stan. W czasie transmisji, w celu uniknięcia kolizji, tylko jeden układ podrzędny może być aktywny na liniach interfejsu. 44 Układy SPI połączone w łąńcuchową (daisy chain)

45 Peryferia port szeregowy RS232 Pin Sygnał Nazwa Kierunek 1 DCD Data Carrier Detect In 2 RXD Receive Data In 3 TXD Transmit Data Out 4 DTR Data Terminal Ready Out 5 GND Ground - 6 DSR Data Set Ready In 7 RTS Request to Send Out 8 CTS Clear to Send In 9 RI Ring Indicator In 45 LPC2368: UART0/2/3 UART1 możliwość budowy modemu






46 RS232 ramka danych UART Universal Asynchronous Receiver Transmitter, 3,3 V P +8 V stan IDLE 8 bitów danych -8 V 46 bit startu 0 bit parzystości Inne typowe szybkości transmisji danych: 110, 150, 300, 1200, 2400, 4800, 9600, 19200, 38400, 57600, , bity stopu: , , , 2 lub 1.5

47 Dziękuję za uwagę :)
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Programowanie Układów Logicznych kod kursu: ETD6203. Komunikacja z układami cyfrowymi W dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
. Rodzaje transmisji sygnału i RS-232
 . Rodzaje transmisji sygnału i RS-232 1. Transmisja szeregowa i równoległa Transmisja sygnału może przebiegać w różnoraki sposób. Najbardziej podstawowym z podziałów, jest podział transmisji sygnału na
. Rodzaje transmisji sygnału i RS-232 1. Transmisja szeregowa i równoległa Transmisja sygnału może przebiegać w różnoraki sposób. Najbardziej podstawowym z podziałów, jest podział transmisji sygnału na
(przykład uogólniony)
") Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Plan wykładu. Architektura systemów komputerowych. Cezary Bolek
 Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Projektowanie Scalonych Systemów Wbudowanych VERILOG
 Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Podstawowe elementy układów cyfrowych układy sekwencyjne. Rafał Walkowiak
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
UKŁADY SEKWENCYJNE Opracował: Andrzej Nowak
 PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY SEKWENCYJNE Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ Układem sekwencyjnym nazywamy układ
PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY SEKWENCYJNE Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ Układem sekwencyjnym nazywamy układ
Sławomir Kulesza. Projektowanie automatów asynchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
System interfejsu RS 232C opracowali P. Targowski i M. Rębarz
 System interfejsu RS 232C opracowali P. Targowski i M. Rębarz Standard RS 232C (Recommended Standard) został ustanowiony w 1969 r. przez Electronic Industries Association. Definiuje on sposób nawiązania
System interfejsu RS 232C opracowali P. Targowski i M. Rębarz Standard RS 232C (Recommended Standard) został ustanowiony w 1969 r. przez Electronic Industries Association. Definiuje on sposób nawiązania
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
MIKROKONTROLERY - MAGISTRALE SZEREGOWE
 Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Interfejs transmisji danych
 Interfejs transmisji danych Model komunikacji: RS232 Recommended Standard nr 232 Specyfikacja warstw 1 i 2 Synchroniczna czy asynchroniczna DTE DCE DCE DTE RS232 szczegóły Uproszczony model komunikacyjny
Interfejs transmisji danych Model komunikacji: RS232 Recommended Standard nr 232 Specyfikacja warstw 1 i 2 Synchroniczna czy asynchroniczna DTE DCE DCE DTE RS232 szczegóły Uproszczony model komunikacyjny
Interfejsy szeregowe TEO 2009/2010
 Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Automat skończony FSM Finite State Machine
 Automat skończony FSM Finite State Machine Projektowanie detektora sekwencji Laboratorium z Elektroniki Współczesnej A. Skoczeń, KOiDC, WFiIS, AGH, 2019 AGH, WFiIS, Elektronika Współczesna 1 Deterministyczny
Automat skończony FSM Finite State Machine Projektowanie detektora sekwencji Laboratorium z Elektroniki Współczesnej A. Skoczeń, KOiDC, WFiIS, AGH, 2019 AGH, WFiIS, Elektronika Współczesna 1 Deterministyczny
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...
 Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...4 Podział układów logicznych...6 Cyfrowe układy funkcjonalne...8 Rejestry...8
Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...4 Podział układów logicznych...6 Cyfrowe układy funkcjonalne...8 Rejestry...8
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Prawidłowe zarządzanie procesem technologicznym wymaga systemu pomiarowo-sterującego Zygmunt Kubiak 2 Poziom komunikacyjny Fieldbus Zygmunt Kubiak
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Prawidłowe zarządzanie procesem technologicznym wymaga systemu pomiarowo-sterującego Zygmunt Kubiak 2 Poziom komunikacyjny Fieldbus Zygmunt Kubiak
Sławomir Kulesza. Projektowanie automatów synchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
IC200UDR002 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
PODSTAWY TEORII UKŁADÓW CYFROWYCH
 PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY KODUJĄCE Kodery Kodery Kodery służą do przedstawienia informacji z tylko jednego aktywnego wejścia na postać binarną. Ponieważ istnieje fizyczna możliwość jednoczesnej
PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY KODUJĄCE Kodery Kodery Kodery służą do przedstawienia informacji z tylko jednego aktywnego wejścia na postać binarną. Ponieważ istnieje fizyczna możliwość jednoczesnej
4. UKŁADY FUNKCJONALNE TECHNIKI CYFROWEJ
 4. UKŁADY FUNKCJONALNE TECHNIKI CYFROWEJ 4.1. UKŁADY KONWERSJI KODÓW 4.1.1. Kody Kod - sposób reprezentacji sygnału cyfrowego za pomocą grupy sygnałów binarnych: Sygnał cyfrowy wektor bitowy Gdzie np.
4. UKŁADY FUNKCJONALNE TECHNIKI CYFROWEJ 4.1. UKŁADY KONWERSJI KODÓW 4.1.1. Kody Kod - sposób reprezentacji sygnału cyfrowego za pomocą grupy sygnałów binarnych: Sygnał cyfrowy wektor bitowy Gdzie np.
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów. Rafał Walkowiak Wersja /2015
 Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Interfejsy. w systemach pomiarowych. Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego
 Interfejsy w systemach pomiarowych Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Interfejsy w systemach pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy
Interfejsy w systemach pomiarowych Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Interfejsy w systemach pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy
1. Poznanie właściwości i zasady działania rejestrów przesuwnych. 2. Poznanie właściwości i zasady działania liczników pierścieniowych.
 Ćwiczenie 9 Rejestry przesuwne i liczniki pierścieniowe. Cel. Poznanie właściwości i zasady działania rejestrów przesuwnych.. Poznanie właściwości i zasady działania liczników pierścieniowych. Wprowadzenie.
Ćwiczenie 9 Rejestry przesuwne i liczniki pierścieniowe. Cel. Poznanie właściwości i zasady działania rejestrów przesuwnych.. Poznanie właściwości i zasady działania liczników pierścieniowych. Wprowadzenie.
Podział układów cyfrowych. rkijanka
 Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Układy kombinacyjne - przypomnienie
 SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy kombinacyjne - przypomnienie W układzie kombinacyjnym wyjście zależy tylko od wejść, SWB - Układy sekwencyjne - wiadomości podstawowe
SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy kombinacyjne - przypomnienie W układzie kombinacyjnym wyjście zależy tylko od wejść, SWB - Układy sekwencyjne - wiadomości podstawowe
Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu
 jest to podstawowy element pamiętający każdego układu") Temat: Sprawdzenie poprawności działania przerzutników. Wstęp: Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu cyfrowego, przeznaczonego do przechowywania i ewentualnego
Temat: Sprawdzenie poprawności działania przerzutników. Wstęp: Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu cyfrowego, przeznaczonego do przechowywania i ewentualnego
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Architektura Systemów Komputerowych. Transmisja szeregowa danych Standardy magistral szeregowych
 Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Techniki mikroprocesorowe i systemy wbudowane
 Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych.
Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych.
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające
 PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
Przemysłowe Sieci informatyczne
 Wykład #3 Transmisja szeregowa Przemysłowe Sieci informatyczne Opracował dr inż. Jarosław Tarnawski Plan wykładu Transmisja szeregowa i równoległa Transmisja synchroniczna i asynchroniczna Simpleks, pół
Wykład #3 Transmisja szeregowa Przemysłowe Sieci informatyczne Opracował dr inż. Jarosław Tarnawski Plan wykładu Transmisja szeregowa i równoległa Transmisja synchroniczna i asynchroniczna Simpleks, pół
SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1. Układy kombinacyjne i sekwencyjne - przypomnienie
 SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1 Układy kombinacyjne i sekwencyjne - przypomnienie SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 2 Stan
SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1 Układy kombinacyjne i sekwencyjne - przypomnienie SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 2 Stan
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH. Interfejsy klasy RS
 INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
Układy sekwencyjne - wiadomości podstawowe - wykład 4
 SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy sekwencyjne - wiadomości podstawowe - wykład 4 Adam Szmigielski aszmigie@pjwstk.edu.pl Laboratorium robotyki s09 SWB - Układy sekwencyjne
SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy sekwencyjne - wiadomości podstawowe - wykład 4 Adam Szmigielski aszmigie@pjwstk.edu.pl Laboratorium robotyki s09 SWB - Układy sekwencyjne
Interfejs urządzeń peryferyjnych
 Interfejs urządzeń peryferyjnych Terminy - Referaty do 08.05.2010 - Egzamin 09.05.2010 lub 22.05.2010 Typy transmisji informacji Transmisja informacji w komputerach odbywa się przy wykorzystaniu magistrali
Interfejs urządzeń peryferyjnych Terminy - Referaty do 08.05.2010 - Egzamin 09.05.2010 lub 22.05.2010 Typy transmisji informacji Transmisja informacji w komputerach odbywa się przy wykorzystaniu magistrali
Układy cyfrowe w Verilog HDL. Elementy języka z przykładami. wersja: cz.3
 Układy cyfrowe w Verilog Elementy języka z przykładami wersja: 10.2009 cz.3 1 Układy sekwencyjne Układy sekwencyjne mają pamięć Układy synchroniczne najczęściej spotykane wszystkie elementy są kontrolowane
Układy cyfrowe w Verilog Elementy języka z przykładami wersja: 10.2009 cz.3 1 Układy sekwencyjne Układy sekwencyjne mają pamięć Układy synchroniczne najczęściej spotykane wszystkie elementy są kontrolowane
LABORATORIUM TECHNIKA CYFROWA LICZNIKI I REJESTRY. Rev.1.1
 LABORATORIUM TECHNIKA CYFROWA LICZNIKI I REJESTRY Rev.1.1 1. Cel ćwiczenia Praktyczna weryfikacja wiedzy teoretycznej z zakresu projektowania układów kombinacyjnych oraz arytmetycznych 2. Projekty Przy
LABORATORIUM TECHNIKA CYFROWA LICZNIKI I REJESTRY Rev.1.1 1. Cel ćwiczenia Praktyczna weryfikacja wiedzy teoretycznej z zakresu projektowania układów kombinacyjnych oraz arytmetycznych 2. Projekty Przy
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Systemy wbudowane Wykład 6 - transmisje szeregowe: UART i pochodne. Komunikacja szeregowa Notes. Rodzaje transmisji Notes. Rodzaje transmisji Notes
 Systemy wbudowane Wykład 6 - transmisje szeregowe: UART i pochodne Przemek Błaśkiewicz 22 kwietnia 2018 1 / 57 Komunikacja szeregowa http://websdr.org 2 / 57 Rodzaje transmisji simplex/sympleks Komunikacja
Systemy wbudowane Wykład 6 - transmisje szeregowe: UART i pochodne Przemek Błaśkiewicz 22 kwietnia 2018 1 / 57 Komunikacja szeregowa http://websdr.org 2 / 57 Rodzaje transmisji simplex/sympleks Komunikacja
Projektowanie automatów z użyciem VHDL
 Projektowanie automatów z użyciem VHDL struktura automatu i jego modelu w VHDL przerzutnik T jako automat przykłady automatów z wyjściami typu: Moore'a Mealy stanu kodowanie stanów automatu Wykorzystano
Projektowanie automatów z użyciem VHDL struktura automatu i jego modelu w VHDL przerzutnik T jako automat przykłady automatów z wyjściami typu: Moore'a Mealy stanu kodowanie stanów automatu Wykorzystano
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Laboratorium przedmiotu Technika Cyfrowa
 Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Podstawy Informatyki Elementarne podzespoły komputera
 Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Reprezentacja informacji Podstawowe bramki logiczne 2 Przerzutniki Przerzutnik SR Rejestry Liczniki 3 Magistrala Sygnały
Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Reprezentacja informacji Podstawowe bramki logiczne 2 Przerzutniki Przerzutnik SR Rejestry Liczniki 3 Magistrala Sygnały
Interfejsy systemów pomiarowych
 Interfejsy systemów pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy układem magistrali (szyny) układem pętli Ze względu na rodzaj transmisji interfejsy możemy podzielić na równoległe
Interfejsy systemów pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy układem magistrali (szyny) układem pętli Ze względu na rodzaj transmisji interfejsy możemy podzielić na równoległe
Aby w pełni przetestować układ o trzech wejściach IN_0, IN_1 i IN_2 chcemy wygenerować wszystkie możliwe kombinacje sygnałów wejściowych.
 Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
PUNKTOWE STEROWNIKI VERSAMAX MICRO
 1.7 64-PUNKTOWE STEROWNIKI VERSAMAX MICRO IC200UDD064 40 wejść dyskretnych 24 VDC, 24 wyjścia tranzystorowe 24 VDC (zabezpieczenie przed zwarciem i przeciąŝeniem), wbudowany port RS232, drugi port dostępny
1.7 64-PUNKTOWE STEROWNIKI VERSAMAX MICRO IC200UDD064 40 wejść dyskretnych 24 VDC, 24 wyjścia tranzystorowe 24 VDC (zabezpieczenie przed zwarciem i przeciąŝeniem), wbudowany port RS232, drugi port dostępny
Transmisja danych cyfrowych
 ransmisja danych cyfrowych Mariusz Rawski rawski@tele.pw.edu.pl www.zpt.tele.pw.edu.pl/~rawski/ Mariusz Rawski 1 łytka laboratoryjna U1 Education Board Mariusz Rawski 2 Standard RS 232 Standard RS-232
ransmisja danych cyfrowych Mariusz Rawski rawski@tele.pw.edu.pl www.zpt.tele.pw.edu.pl/~rawski/ Mariusz Rawski 1 łytka laboratoryjna U1 Education Board Mariusz Rawski 2 Standard RS 232 Standard RS-232
Literatura. adów w cyfrowych. Projektowanie układ. Technika cyfrowa. Technika cyfrowa. Bramki logiczne i przerzutniki.
 Literatura 1. D. Gajski, Principles of Digital Design, Prentice- Hall, 1997 2. C. Zieliński, Podstawy projektowania układów cyfrowych, PWN, Warszawa 2003 3. G. de Micheli, Synteza i optymalizacja układów
Literatura 1. D. Gajski, Principles of Digital Design, Prentice- Hall, 1997 2. C. Zieliński, Podstawy projektowania układów cyfrowych, PWN, Warszawa 2003 3. G. de Micheli, Synteza i optymalizacja układów
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Podstawy Elektroniki dla Elektrotechniki. Liczniki synchroniczne na przerzutnikach typu D
 AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
Przerzutnik ma pewną liczbę wejść i z reguły dwa wyjścia.
 Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
TECHNIKA CYFROWA ELEKTRONIKA ANALOGOWA I CYFROWA. Badanie rejestrów
 LABORATORIUM TECHNIKA CYFROWA ELEKTRONIKA ANALOGOWA I CYFROWA Badanie rejestrów Opracował: Tomasz Miłosławski Wymagania, znajomość zagadnień: 1. Typy, parametry, zasada działania i tablice stanów przerzutników
LABORATORIUM TECHNIKA CYFROWA ELEKTRONIKA ANALOGOWA I CYFROWA Badanie rejestrów Opracował: Tomasz Miłosławski Wymagania, znajomość zagadnień: 1. Typy, parametry, zasada działania i tablice stanów przerzutników
Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające
 Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Liczniki klasyfikacja Licznik asynchroniczny:
Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Liczniki klasyfikacja Licznik asynchroniczny:
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur. Piotr Fita
 Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
dwójkę liczącą Licznikiem Podział liczników:
 1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające
 Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Sekwencyjny układ przełączający układ przełączający
Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Sekwencyjny układ przełączający układ przełączający
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Programowalne układy logiczne
 Programowalne układy logiczne Przerzutniki Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 20 maja 2013 Przerzutnik synchroniczny Układ synchroniczny wyzwalany ustalonym
Programowalne układy logiczne Przerzutniki Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 20 maja 2013 Przerzutnik synchroniczny Układ synchroniczny wyzwalany ustalonym
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
1.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych
 .Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp:
 Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
2010-04-12. Magistrala LIN
 Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 4
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
Odbiór i dekodowanie znaków ASCII za pomocą makiety cyfrowej. Znaki wysyłane przez komputer za pośrednictwem łącza RS-232.
 Odbiór i dekodowanie znaków ASCII za pomocą makiety cyfrowej. Znaki wysyłane przez komputer za pośrednictwem łącza RS-232. Opracowanie: Andrzej Grodzki Do wysyłania znaków ASCII zastosujemy dostępny w
Odbiór i dekodowanie znaków ASCII za pomocą makiety cyfrowej. Znaki wysyłane przez komputer za pośrednictwem łącza RS-232. Opracowanie: Andrzej Grodzki Do wysyłania znaków ASCII zastosujemy dostępny w
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Wykład Mikroprocesory i kontrolery
 Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Układy sekwencyjne. Podstawowe informacje o układach cyfrowych i przerzutnikach (rodzaje, sposoby wyzwalania).
.") Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Ćwiczenie 7 Matryca RGB
 IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Programowalne układy logiczne
 Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowanie Mikrokontrolerów. Komunikacja szeregowa w standardzie EIA232 z wykorzystaniem modułu USART.
 Programowanie Mikrokontrolerów Komunikacja szeregowa w standardzie EIA232 z wykorzystaniem modułu USART. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Komunikacja szeregowa Jakie znamy typy komunikacji
Programowanie Mikrokontrolerów Komunikacja szeregowa w standardzie EIA232 z wykorzystaniem modułu USART. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Komunikacja szeregowa Jakie znamy typy komunikacji
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Podstawy Automatyki. Wykład 13 - Wprowadzenie do układów sekwencyjnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację