Współpraca procesora ColdFire z urządzeniami peryferyjnymi
|
|
|
- Bogusław Leszczyński
- 9 lat temu
- Przeglądów:
Transkrypt
1 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1

2 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs zgodny ze standardem EIA 232, Interfejs SPI, Interfejs I2C, Interfejs CAN, Interfejs USB, Magistrala PCI. 2

3 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs zgodny ze standardem EIA 232, Interfejs SPI, Interfejs I2C, Interfejs CAN, Interfejs USB, Magistrala PCI. 3

4 Serial Peripheral Interface Cechy interfejsu SPI: Szeregowa transmisja synchroniczna, Transfer full duplex, master-slave lub master-multi-slave, Duża szybkość transmisji (>12 Mbit/s), Zastosowanie: układy peryferyjne (ADC, DAC, RTC, EEPROM, termometry, itp), sterowanie pomocnicze (matryca CCD z szybkim interfejsem równoległym). 4
, sterowanie pomocnicze (matryca CCD z szybkim interfejsem")
5 Serial Peripheral Interface Master Output Slave Input Master Input Slave Output CS Master Slave 5

6 Protokół interfejsu SPI Konfiguracja sygnału zegarowego: Polaryzacja zegara: Polaryzacja ujemna CPOL = 0 (stan niski, 8 impulsów zegara), Polaryzacja dodatnia CPOL = 1 (stan wysoki, 8 ujemnych impulsów zegara). Faza zegara: Zerowa faza zegara (próbkowanie na pierwszym zboczu zegara), Opóźniona faza zegara (próbkowanie na drugim zboczu zegara). 6
, Opóźniona")


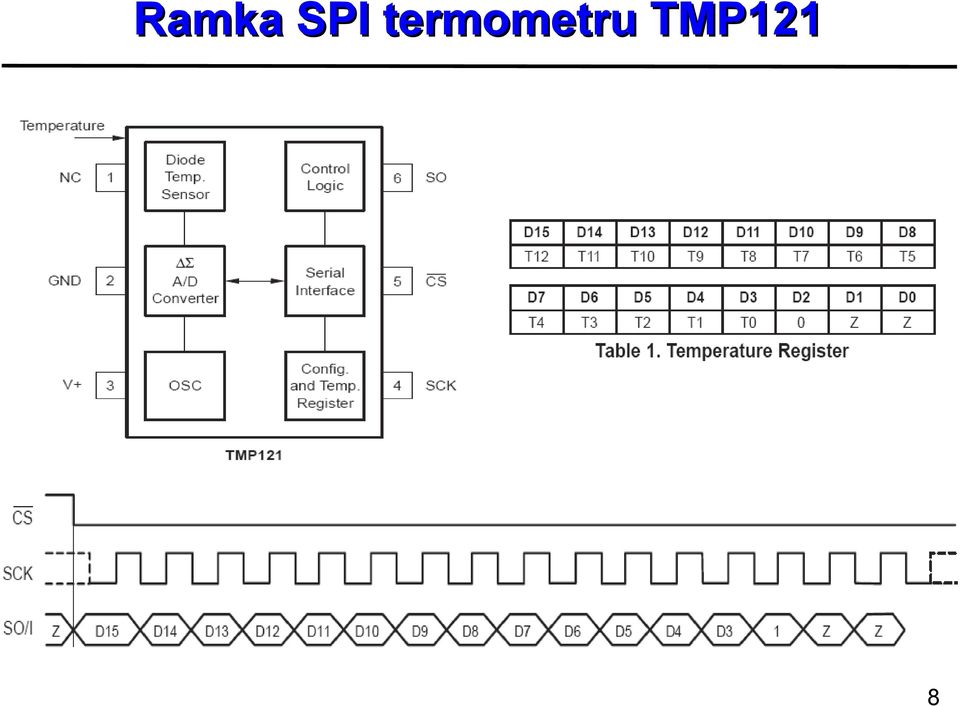
7 Termometr z interfasem SPI TMP 121: Obudowa SOT 23-6, FClk mak. = 15 MHz Interfejs: SPI-Compatible Interface Rozdzielczość: 12-Bit + Sign, C Dokładność: ±1.5 C od 25 C do +85 C Pobór prądu w stanie uśpienia: 50μA (mak.) Zasilanie: 2.7V to 5.5V 3 mm 7


8 Ramka SPI termometru TMP121 8
9 Queued SPI (2) Cechy modułu QSPI: Kolejka FIFO umożliwiająca obsługę do 16 transferów (bez udziału procesora), Transfery danych od 8 do 16 bitów, Cztery programowalne wyjścia aktywujące urządzenia dołączone do SPI (obsługa do 15 urządzeń), Szybkość transmisji od 129,4 kbps do 16,67 Mbps dla 66 MHz, Programowalne opóźnienia pomiędzy transferami, Programowalna polaryzacja i faza zegara, Wsparcie do ciągłej pracy z minimalnym udziałem procesora (przetwornika ADC, DAC) 9

10 Queued SPI (2) TxD FIFO 8x16 B RxD FIFO 8x16 B Command FIFO 3x8x16 B 10

11 Magistrala I2C Magistrala I2C: Dwuprzewodowy interfejs synchroniczny (SDA linia danych, SCL linia zegara), Transmisja dwukierunkowa, typu master-slave (multi-master), ramki 8-bitowe, Szybkość transmisji: 100 kbps (standard mode), 400 kbps (fast mode), 3,4 Mbps (high-speed mode), Urządzenia posiadają niepowtarzalne adresy (7-bitów lub 10-bitów), Synchronizacja przy pomocy sygnału zegarowego umożliwia pracę urządzeń komunikujących się z różnymi szybkościami, Liczba urządzeń dołączonych do magistrali ograniczona jest pojemnością magistrali (400 pf), Mechanizmy arbitrażu umożliwiające uniknięcie kolizji i utraty danych. 11
, Mechanizmy arbitrażu umożliwiające uniknięcie")
12 Zastosowanie interfejsu I2C W sprzedaży dostępnych jest wiele bardzo tanich układów scalonych sterowanych poprzez I²C: * PCF8563/ zegar, kalendarz, alarm, timer, dodatkowo może służyć jako RAM * PCF pseudo-dwukierunkowy 8-bitowy ekspander * PCF8576, PCF sterowniki wyświetlaczy LCD * PCF pamięć EEPROM 256 bajtów (1, 2, 4 kb,... MB) * PCF bitowy, 4-kanałowy przetwornik analogowo-cyfrowy i cyfrowoanalogowy 12

13 Magistrala I2C Urządzenie nadrzędne (Master) inicjuje transmisję, generuje sygnał zegarowy Urządzenie podrzędne (Slave) analizuje wysłany przez urządzenie adres i transmituje lub odbiera dane. 13

14 Rozpoczęcie oraz zakończenie transmisji Rozpoczęcie transmisji generacja sygnału START (opadające zbocze na szynie SDA, zmiana stanu z 1 na 0 logiczne, podczas ważnego sygnału SCL = 1 ). Sygnał generuje Master. Zakończenie transmisji generacja sygnału STOP (narastające zbocze na szynie SDA, zmiana stanu z 0 na 1 logiczną,podczas ważnego sygnału SCL = 1 ). Sygnał generuje Master. 14

15 Protokół I2C A) Transmisje rozpoczyna Master generując sygnał START. B) Następnie transmituje 8 bitów danych (7 bitów adresowych, bit R/W). C) Po transmisji 8 bitów Slave przejmuje magistralę i wymusza odpowiedni poziom na linii SDA (9 takt zegara). Odpowiada w ten sposób bitem potwierdzenia ACK (brak potwierdzenia, ACK = 1 ). E) Po przesłaniu adresu następuje faza odczytu lub zapisu danej do obsługiwanego urządzenia (8 bitów danych). F) Po przesłaniu danych urządzenie nadrzędne kończy transmisję generując brak potwierdzenia (ACK = 1 ) oraz bit stopu. 15
 Po przesłaniu adresu następuje faza odczytu lub zapisu danej do obsługiwanego urządzenia (8 bitów danych).")
16 Zapis lub odczyt 7-bit 7-bit 16

17 Magistrala I2C Moduł sterujący interfejsem I2C procesorów z rodziny ColdFire: Zgodny ze standardem w wersji 2.1, Umożliwia dołączenie urządzeń zasilanych napięciem 3,3 V, Praca w trybie multimater, Możliwość użycia 50 różnych częstotliwości zegara (fclk/28 - fclk/2048), Transfery poszczególnych bajtów wyzwalane przerwaniami, Arbitration-lost interrupt with automatic mode switching from master to slave Przerwanie zgłaszane, gdy zostanie wykryty adres urządzenia w trybie Slave, Automatyczne Wykrywanie stanu zajętością magistrali. 17

18 Schemat blokowy modułu I2C 18

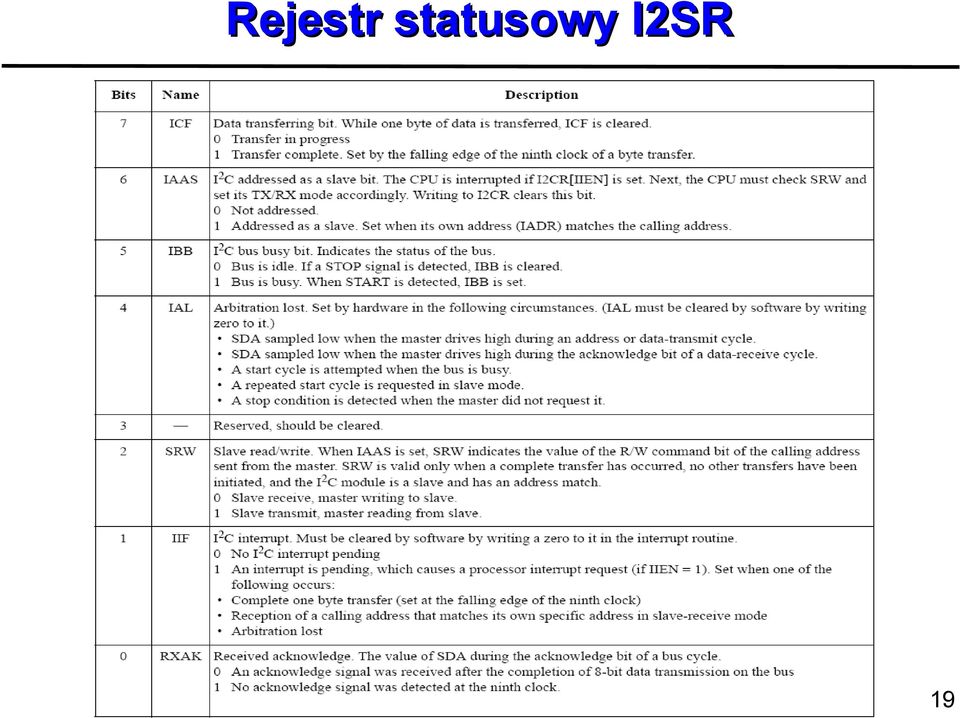
19 Rejestr statusowy I2SR 19
, Długość identyfikatora: 11-bitowy identyfikator (2.0A ) i 29-bitowy identyfikator (2.")
20 Magistrala CAN (Control Area Network) Charakterystyka magistrali CAN: Szeregową magistralą komunikacyjną typu multi-master (obecny standard 2.0A oraz 2.0B), Długość identyfikatora: 11-bitowy identyfikator (2.0A ) i 29-bitowy identyfikator (2.0B), Transmisja oparta na komunikatach rozgłoszeniowych (broadcast), Transmisja różnicowa, Szybkość transmisji do 1 Mbit/s na dystansie do 40 m (250 kbit/s na 250 m), Transmisja do 8 bajtów w jednym komunikacie, Komunikaty rozpoznawana są na podstawie identyfikatorów, CAN charakteryzuje się dużą odpornością na zakłócenia elektromagnetyczne i niezawodnością, Rozbudowana sprzętowa obsługa błędów, Możliwość dołączenia do 30 urządzeń do magistrali. 20

21 Model warstwowy interfejsu CAN 21

22 Warstwa fizyczna (1) SN65HVD230 Rter. = 120 R 22
 0 dominujący")
23 Warstwa fizyczna (2) Dwa stany magistrali: 1 niedominujący (recessive) 0 dominujący (dominant) 23
24 Transceiver CAN 24
25 Przykładowa ramka magistrali CAN ID identyfikator ramki RTR (Remote Transmit Request) żądanie przesłania danych Arbitration Field ustala priorytet komunikatu (12 bit, 0 najwyższy priorytet) Control Field (IDE 0 ramka standardowa CAN 2.0A, 1 ramka rozszerzona CAN 2.0B, RB0 - zarezerwowany, DLC długość ramki) CRC 15-bitowa suma kontrolna Data Field transmitowane dane (maksymalnie 8 B) Error Frame błąd w odebranej ramce (CRC) Overload Frame urządzenie nie jest gotowe do przesłania danych a 25
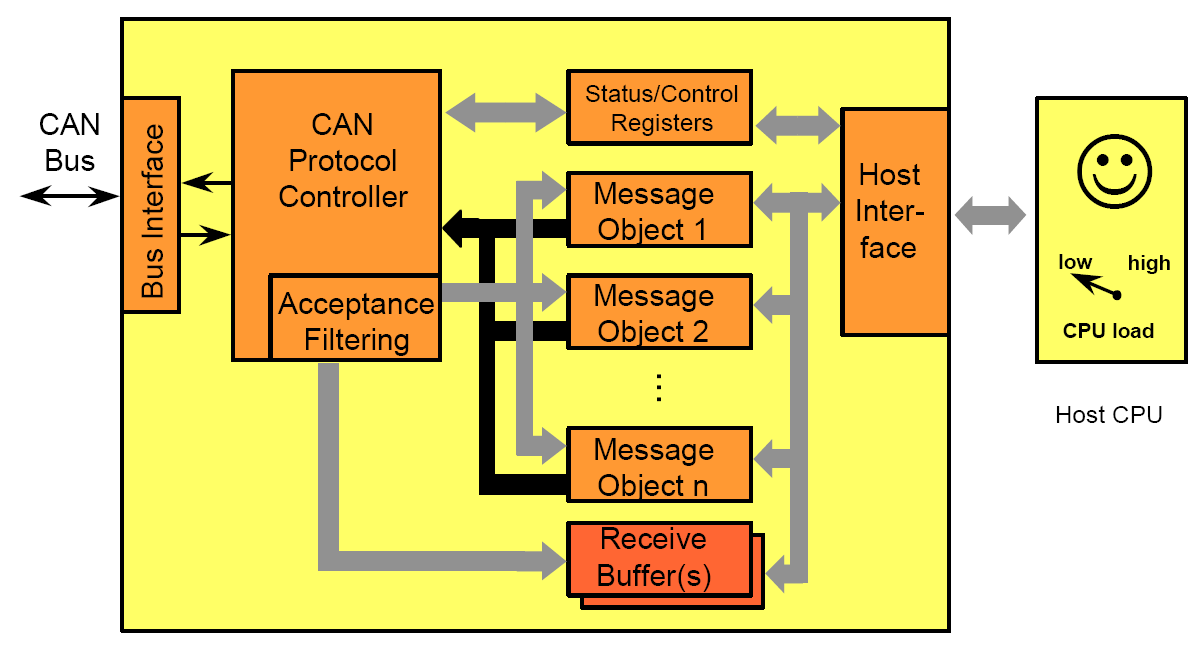
26 Sterownik CAN procesora ColdFire (1) Cechy charakterystyczne: Sterownik kompatybilny ze standardem CAN 2.0: Obsługa ramek zgodnych z CAN 2.0A (do 109 bit), Obsługa ramek rozszerzonych zgodnych z CAN 2.0B (do 127 bit), Długość pola danych maksymalnie 8 B, Programowalna szybkość transmisji do 1 Mbit/s, 16 programowalnych buforów pracujących jako Rx lub Tx (0-8 B), Adresowanie zależne od zawartości ramki, 16-bitowy rejestr odmierzający czas, Licznik czasu synchronizowany specjalnymi komunikatami Maskowalne przerwania, Sterownik niezależny od medium fizycznego (transmisja różnicowa, światłowodowa), Krótki czas obsługi komunikatów o dużym priorytecie, Tryb obniżonego poboru mocy (Sleep, Hibernation). 26
27 Sterownik CAN procesora ColdFire (2) 27
28 Współpraca procesora ColdFire z zewnętrznym układem PHY 28
29 Bufory komunikacyjne CAN SRR 0 Data Frame Remote Frame ID = 29 bit RTR 0 Data Frame Remote Frame ID = 11 bit 29
30 Egzamin Sala Seminaryjna Egzamin: ~
31 Prace magisterskie 1. Współpraca z ośrodkiem naukowo-badawczym DESY w Hamburgu w ramach projektu CARE 2. Współpraca w ramach projekty PERPLEXUS 31
32 CARE (1) Sterownik SimCon 3.1L 32
33 CARE (2) Sterownik ATCA ATCA - Advanced Telecom Computing Architecture 33
34 CARE (3) Płyta uruchomieniowa z interfejsem PCIe 34
35 PERPLEXUS (1) 35
 36")
36 PERPLEXUS (2) 36
37 PERPLEXUS (3) 37
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Współpraca procesora z urządzeniami peryferyjnymi 1 Moduł transceivera szeregowego UART (Universal Asynchronous Receiver/Transmitter module) 2 Interfejs szeregowy EIA RS232 3 Transceiver UART Rejestr przesuwny
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Standard sieci komputerowej Ethernet
 Standard sieci komputerowej Ethernet 1 Ethernet Standard sieci komputerowych opracowany przez firmę Xerox, DEC oraz Intel w 1976 roku Standard wykorzystuje topologie sieci typu magistrala, pierścień lub
Standard sieci komputerowej Ethernet 1 Ethernet Standard sieci komputerowych opracowany przez firmę Xerox, DEC oraz Intel w 1976 roku Standard wykorzystuje topologie sieci typu magistrala, pierścień lub
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Systemy wbudowane - wykład 8. Dla zabicia czasu Notes. I 2 C aka IIC aka TWI. Notes. Notes. Notes. Przemek Błaśkiewicz.
 Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
MIKROKONTROLERY - MAGISTRALE SZEREGOWE
 Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Wykład 3. Interfejsy CAN, USB
 Wykład 3 Interfejsy CAN, USB Interfejs CAN CAN Controller Area Network CAN Controller Area Network CAN - podstawy Cechy: - różnicowy protokół komunikacji zdefiniowany w ISO11898 - bardzo niezawodny - dostępna
Wykład 3 Interfejsy CAN, USB Interfejs CAN CAN Controller Area Network CAN Controller Area Network CAN - podstawy Cechy: - różnicowy protokół komunikacji zdefiniowany w ISO11898 - bardzo niezawodny - dostępna
Interfejsy szeregowe TEO 2009/2010
 Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Problematyka sieci miejscowej LIN
 Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
2010-04-12. Magistrala LIN
 Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrale szeregowe
 Magistrale szeregowe Magistrale 2/21 pamięci zewn. ukł.obsługi PAO dekodery adresów kontrolery przerwań timery RTC procesor magistrala systemowa pamięć programu (ROM) pamięć danych (RAM) urz. operatorskie
Magistrale szeregowe Magistrale 2/21 pamięci zewn. ukł.obsługi PAO dekodery adresów kontrolery przerwań timery RTC procesor magistrala systemowa pamięć programu (ROM) pamięć danych (RAM) urz. operatorskie
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Systemy wbudowane - wykład 7
 Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
Wykład 4. Interfejsy USB, FireWire
 Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne.
 Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Szeregowe UART/USART RS232/422/485 I2C SPI CAN USB LAN Ethernet Topologie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Szeregowe UART/USART RS232/422/485 I2C SPI CAN USB LAN Ethernet Topologie
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Komunikacja z urzadzeniami zewnętrznymi
 Komunikacja z urzadzeniami zewnętrznymi Porty Łacza równoległe Łacza szeregowe Wymiana informacji - procesor, pamięć oraz urzadzenia wejścia-wyjścia Większość mikrokontrolerów (Intel, AVR, PIC) używa jednego
Komunikacja z urzadzeniami zewnętrznymi Porty Łacza równoległe Łacza szeregowe Wymiana informacji - procesor, pamięć oraz urzadzenia wejścia-wyjścia Większość mikrokontrolerów (Intel, AVR, PIC) używa jednego
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
Wykład 4. Interfejsy USB, FireWire
 Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
I 2 C BUS (1) 1 L.Łukasiak: Podstawy Techniki Mikroprocesorowej (materiały pomocnicze)
 1 L.Łukasiak: Podstawy Techniki Mikroprocesorowej (materiały pomocnicze)") I 2 C BUS (1) Protokół komunikacyjny I 2 C BUS został opracowany przez firmę Philips w celu umożliwienia komunikacji między układami scalonymi Magistrala (bus) składa się z dwóch linii dwukierunkowych:
I 2 C BUS (1) Protokół komunikacyjny I 2 C BUS został opracowany przez firmę Philips w celu umożliwienia komunikacji między układami scalonymi Magistrala (bus) składa się z dwóch linii dwukierunkowych:
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Architektura komputerów
 Architektura komputerów Tydzień 8 Magistrale systemowe Magistrala Układy składające się na komputer (procesor, pamięć, układy we/wy) muszą się ze sobą komunikować, czyli być połączone. Układy łączymy ze
Architektura komputerów Tydzień 8 Magistrale systemowe Magistrala Układy składające się na komputer (procesor, pamięć, układy we/wy) muszą się ze sobą komunikować, czyli być połączone. Układy łączymy ze
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
PRZERWANIA. 1. Obsługa zdarzeń, odpytywanie i przerwania Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego.
 PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
PRZERWANIA 1. Obsługa zdarzeń, odpytywanie i Obsługa zdarzeń jest jedną z kluczowych funkcji w prawie każdym systemie czasu rzeczywistego. Istnieją dwie metody pozyskania informacji o zdarzeniach: 1. Cykliczne
WYKŁAD 5. Zestaw DSP60EX. Zestaw DSP60EX
 Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Paweł MOROZ Politechnika Śląska, Instytut Informatyki pawel.moroz@polsl.pl
 Rozdział Biblioteka funkcji komunikacyjnych CAN Paweł MOROZ Politechnika Śląska, Instytut Informatyki pawel.moroz@polsl.pl Streszczenie W rozdziale zaprezentowano bibliotekę funkcji komunikacyjnych CAN,
Rozdział Biblioteka funkcji komunikacyjnych CAN Paweł MOROZ Politechnika Śląska, Instytut Informatyki pawel.moroz@polsl.pl Streszczenie W rozdziale zaprezentowano bibliotekę funkcji komunikacyjnych CAN,
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Architektura komputerów
 Architektura komputerów PCI EXPRESS Rozwój technologii magistrali Architektura Komputerów 2 Architektura Komputerów 2006 1 Przegląd wersji PCI Wersja PCI PCI 2.0 PCI 2.1/2.2 PCI 2.3 PCI-X 1.0 PCI-X 2.0
Architektura komputerów PCI EXPRESS Rozwój technologii magistrali Architektura Komputerów 2 Architektura Komputerów 2006 1 Przegląd wersji PCI Wersja PCI PCI 2.0 PCI 2.1/2.2 PCI 2.3 PCI-X 1.0 PCI-X 2.0
Programowanie Mikrokontrolerów. Magistrala I2C (Inter-Integrated Circuit).
.") Programowanie Mikrokontrolerów Magistrala I2C (Inter-Integrated Circuit). mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Marcin Byczuk Komunikacja szeregowa Jakie znamy typy komunikacji szeregowej?
Programowanie Mikrokontrolerów Magistrala I2C (Inter-Integrated Circuit). mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Marcin Byczuk Komunikacja szeregowa Jakie znamy typy komunikacji szeregowej?
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
16. Szeregowy interfejs SPI
 16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
IC200UDR002 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy bufor dwukierunkowy HC244 dwa 4-bitowe bufory jednokierunkowe
 Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Wykład Mikroprocesory i kontrolery
 Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Płyta uruchomieniowa EBX51
 Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
TEMPERATURE CONTROL SYSTEM BY THE CAN BUS UKŁAD REGULACJI TEMPERATURY POPRZEZ MAGISTRALĘ CAN
 Mateusz Niedziółka V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy TEMPERATURE CONTROL SYSTEM BY THE CAN BUS UKŁAD REGULACJI TEMPERATURY POPRZEZ MAGISTRALĘ CAN Keywords:
Mateusz Niedziółka V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy TEMPERATURE CONTROL SYSTEM BY THE CAN BUS UKŁAD REGULACJI TEMPERATURY POPRZEZ MAGISTRALĘ CAN Keywords:
Wykład Mikrokontrolery i mikrosystemy Cele wykładu:
 Wykład Mikrokontrolery i mikrosystemy Cele wykładu: Poznanie podstaw budowy, zasad działania i sterowania mikrokontrolerów i ich urządzeń peryferyjnych. Niezbędna wiedza do dalszego samokształcenia się
Wykład Mikrokontrolery i mikrosystemy Cele wykładu: Poznanie podstaw budowy, zasad działania i sterowania mikrokontrolerów i ich urządzeń peryferyjnych. Niezbędna wiedza do dalszego samokształcenia się
CompactPCI. PCI Industrial Computers Manufacturers Group (PICMG)
") PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw
 Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2720 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/sw 1 Zakres przedmiotu Systemy mikroprocesorowe, systemy wbudowane Laboratorium
USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip.
 1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Opis funkcjonalny i architektura. Modu³ sterownika mikroprocesorowego KM535
 Opis funkcjonalny i architektura Modu³ sterownika mikroprocesorowego KM535 Modu³ KM535 jest uniwersalnym systemem mikroprocesorowym do pracy we wszelkiego rodzaju systemach steruj¹cych. Zastosowanie modu³u
Opis funkcjonalny i architektura Modu³ sterownika mikroprocesorowego KM535 Modu³ KM535 jest uniwersalnym systemem mikroprocesorowym do pracy we wszelkiego rodzaju systemach steruj¹cych. Zastosowanie modu³u
Architektura systemu komputerowego
 Zakres przedmiotu 1. Wstęp do systemów mikroprocesorowych. 2. Współpraca procesora z pamięcią. Pamięci półprzewodnikowe. 3. Architektura systemów mikroprocesorowych. 4. Współpraca procesora z urządzeniami
Zakres przedmiotu 1. Wstęp do systemów mikroprocesorowych. 2. Współpraca procesora z pamięcią. Pamięci półprzewodnikowe. 3. Architektura systemów mikroprocesorowych. 4. Współpraca procesora z urządzeniami
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Instrukcja MM-717 Tarnów 2010
 Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515
 Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Rozproszony system zbierania danych.
 Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
DTR PICIO v1.0. 1. Przeznaczenie. 2. Gabaryty. 3. Układ złącz
 DTR PICIO v1.0 1. Przeznaczenie Moduł PICIO jest uniwersalnym modułem 8 wejść cyfrowych, 8 wyjść cyfrowych i 8 wejść analogowych. Głównym elementem modułu jest procesor PIC18F4680. Izolowane galwanicznie
DTR PICIO v1.0 1. Przeznaczenie Moduł PICIO jest uniwersalnym modułem 8 wejść cyfrowych, 8 wyjść cyfrowych i 8 wejść analogowych. Głównym elementem modułu jest procesor PIC18F4680. Izolowane galwanicznie
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH. Interfejsy klasy RS
 INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Protokół CAN-bus PKP.
 Protokol_CANBUS_UTXvTR 18.12.09 Protokół CAN-bus PKP. 1 ADRES URZĄDZENIA CAN-BUS.... 2 2 POLECENIE RESETU I POLECENIE KONTROLNE....2 3 BLOKADY....2 4 KODY BŁĘDÓW WYKONANIA POLECEŃ....2 5 LISTA POLECEŃ
Protokol_CANBUS_UTXvTR 18.12.09 Protokół CAN-bus PKP. 1 ADRES URZĄDZENIA CAN-BUS.... 2 2 POLECENIE RESETU I POLECENIE KONTROLNE....2 3 BLOKADY....2 4 KODY BŁĘDÓW WYKONANIA POLECEŃ....2 5 LISTA POLECEŃ
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
KOMPUTEROWE SYSTEMY POMIAROWE
 KOMPUTEROWE SYSTEMY POMIAROWE Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST - ITwE Semestr letni Wykład nr 4 Prawo autorskie Niniejsze
KOMPUTEROWE SYSTEMY POMIAROWE Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST - ITwE Semestr letni Wykład nr 4 Prawo autorskie Niniejsze
Temat: Pamięci. Programowalne struktury logiczne.
 Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Szczegółowy opis przedmiotu zamówienia. Część 1 - Laboratoryjny zestaw prototypowy
 Załącznik nr 6 do SIWZ Szczegółowy opis przedmiotu zamówienia Ilość: 3 sztuki (kpl.) CPV 38434000-6 analizatory Część 1 - Laboratoryjny zestaw prototypowy Parametry urządzenia: Zintegrowany oscyloskop:
Załącznik nr 6 do SIWZ Szczegółowy opis przedmiotu zamówienia Ilość: 3 sztuki (kpl.) CPV 38434000-6 analizatory Część 1 - Laboratoryjny zestaw prototypowy Parametry urządzenia: Zintegrowany oscyloskop:
STHR-2810, 2811, 2812 Przetwornik temperatury i wilgotności z czujnikiem Sensirion
 STHR-2810, 2811, 2812 Przetwornik temperatury i wilgotności z czujnikiem Sensirion AN-STHR-2810_2811_2812v1_01 Data aktualizacji: 08/2011r. 08/2011 AN-STHR-2810_2811_2812v1_01 1 Spis treści Symbole i oznaczenia...
STHR-2810, 2811, 2812 Przetwornik temperatury i wilgotności z czujnikiem Sensirion AN-STHR-2810_2811_2812v1_01 Data aktualizacji: 08/2011r. 08/2011 AN-STHR-2810_2811_2812v1_01 1 Spis treści Symbole i oznaczenia...
Architektura Systemów Komputerowych. Transmisja szeregowa danych Standardy magistral szeregowych
 Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
CR232.S v2 KONWERTER CAN / RS232
 CR232.S v2 KONWERTER CAN / RS232 UWAGA Za pomocą konwertera CR232 można wpływać na działanie sieci CAN, co może powodować zagrożenia dla systemu sterowania oraz zdrowia i życia ludzi. Firma DIGA nie ponosi
CR232.S v2 KONWERTER CAN / RS232 UWAGA Za pomocą konwertera CR232 można wpływać na działanie sieci CAN, co może powodować zagrożenia dla systemu sterowania oraz zdrowia i życia ludzi. Firma DIGA nie ponosi
Moduł wspierający diagnostykę i sprzętowe debugowanie
 Moduł wspierający diagnostykę i sprzętowe debugowanie 1 Diagnostyka mikroprocesorowego systemu czasu rzeczywistego Programowe emulatory procesorów, Sprzętowe emulatory procesorów, Debugery programowe,
Moduł wspierający diagnostykę i sprzętowe debugowanie 1 Diagnostyka mikroprocesorowego systemu czasu rzeczywistego Programowe emulatory procesorów, Sprzętowe emulatory procesorów, Debugery programowe,
Moduł uruchomieniowy mikrokontrolera MC68HC912B32
 Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
Charakterystyka mikrokontrolerów
 Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Mini Modbus 1AI. Moduł rozszerzający 1 wejście analogowe, 1 wyjście cyfrowe. Wyprodukowano dla
 Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Część I - Sterownik przerwań 8259A i zegar/licznik 8253
 Programowanie na poziome sprzętu opracowanie pytań Część I - Sterownik przerwań 8259A i zegar/licznik 8253 Autor opracowania: Marcin Skiba cines91@gmail.com 1. Jakie są dwie podstawowe metody obsługi urządzeń
Programowanie na poziome sprzętu opracowanie pytań Część I - Sterownik przerwań 8259A i zegar/licznik 8253 Autor opracowania: Marcin Skiba cines91@gmail.com 1. Jakie są dwie podstawowe metody obsługi urządzeń
Protokół CAN-bus. C omputers & C ontrol, Katowice, ul. Porcelanowa 11. 1/8
 Protokol_CANBUS_UTXvL 15.01.10 Protokół CAN-bus. 1 ADRES URZĄDZENIA CAN-BUS.... 2 2 POLECENIE RESETU I POLECENIE KONTROLNE.... 2 3 BLOKADY.... 2 4 KODY BŁĘDÓW WYKONANIA POLECEŃ.... 2 5 LISTA POLECEŃ NORMALNYCH
Protokol_CANBUS_UTXvL 15.01.10 Protokół CAN-bus. 1 ADRES URZĄDZENIA CAN-BUS.... 2 2 POLECENIE RESETU I POLECENIE KONTROLNE.... 2 3 BLOKADY.... 2 4 KODY BŁĘDÓW WYKONANIA POLECEŃ.... 2 5 LISTA POLECEŃ NORMALNYCH
Analizowanie protokołów szeregowych oscyloskopami Rohde&Schwarz (2) SPI, I 2 C
 SPI, I 2 C") SPRZĘT Analizowanie protokołów szeregowych oscyloskopami Rohde&Schwarz (2) SPI, I 2 C Badanie protokołów komunikacyjnych jest już obowiązkową funkcją oscyloskopów cyfrowych co najmniej średniej klasy.
SPRZĘT Analizowanie protokołów szeregowych oscyloskopami Rohde&Schwarz (2) SPI, I 2 C Badanie protokołów komunikacyjnych jest już obowiązkową funkcją oscyloskopów cyfrowych co najmniej średniej klasy.
Wybrane bloki i magistrale komputerów osobistych (PC) Opracował: Grzegorz Cygan 2010 r. CEZ Stalowa Wola
 Opracował: Grzegorz Cygan 2010 r. CEZ Stalowa Wola") Wybrane bloki i magistrale komputerów osobistych (PC) Opracował: Grzegorz Cygan 2010 r. CEZ Stalowa Wola Ogólny schemat komputera Jak widać wszystkie bloki (CPU, RAM oraz I/O) dołączone są do wspólnych
Wybrane bloki i magistrale komputerów osobistych (PC) Opracował: Grzegorz Cygan 2010 r. CEZ Stalowa Wola Ogólny schemat komputera Jak widać wszystkie bloki (CPU, RAM oraz I/O) dołączone są do wspólnych
Systemy uruchomieniowe
 Systemy uruchomieniowe Przemysław ZAKRZEWSKI Systemy uruchomieniowe (1) 1 Środki wspomagające uruchamianie systemów mikroprocesorowych Symulator mikroprocesora Analizator stanów logicznych Systemy uruchomieniowe:
Systemy uruchomieniowe Przemysław ZAKRZEWSKI Systemy uruchomieniowe (1) 1 Środki wspomagające uruchamianie systemów mikroprocesorowych Symulator mikroprocesora Analizator stanów logicznych Systemy uruchomieniowe:
Standard transmisji równoległej LPT Centronics
 Standard transmisji równoległej LPT Centronics Rodzaje transmisji szeregowa równoległa Opis LPT łącze LPT jest interfejsem równoległym w komputerach PC. Standard IEEE 1284 został opracowany w 1994 roku
Standard transmisji równoległej LPT Centronics Rodzaje transmisji szeregowa równoległa Opis LPT łącze LPT jest interfejsem równoległym w komputerach PC. Standard IEEE 1284 został opracowany w 1994 roku