Liczniki z zastosowaniem
|
|
|
- Władysława Stefaniak
- 6 lat temu
- Przeglądów:
Transkrypt
1 Liczniki z zastosowaniem FPGA i µc Fizyka Medyczna, studia II stopnia, Dozymetria i elektronika w medycynie 1
2 Zliczanie impulsów Źródło impulsów Kondycjonowanie Licznik Wyświetlacz Układ czasowy 2
3 Liczniki Rodzaje implementacji: Układy średniej skali integracji MSI Mikrokontroler Układ FPGA 3
4 Przerzutnik D Q n+1 = D CLK D Q n Q n+1 0 x 0 kasowanie 1 x 1 ustawianie n+1 oznacza nstępny stan wyjścia Q tzn. po narastającym zboczu zegara 4
5 Przerzutnik J-K CLK J K Q n Q n x Q n trzymanie 0 1 x 0 kasowanie 1 0 x 1 ustawianie 1 1 x Q n zamiana x x x Q n JK Q Q n+1 = JQ n + K Q n 5
6 Przerzutnik T T CLK T Q n Q n+1 0 x Q n trzymanie 1 x Q n zamiana x x Q n T Q Alternatywa wykluczająca Q n+1 = Q n T + Q n T = Q n T 6
7 Licznik asynchroniczny 1 clk T D1 clk D1 D T 1 T clk D1 D2 LSB MSB 7
8 Licznik asynchroniczny T T T T 8
9 Licznik synchroniczny 1 clk T D1 clk D1 D T T clk D1 D2 9
10 Licznik synchroniczny T T T T 10
11 Licznik - MSI Polaryzacja diod a Polaryzacja diod a f g b f g b e d c e d c g f e d c b a g f e d c b a 74x47 BCD -> 7seg 74x47 BCD -> 7seg Q A Q B Q C Q D Q A Q B Q C Q D Binary -> BCD Q A Q B Q C Q D 74x163 11
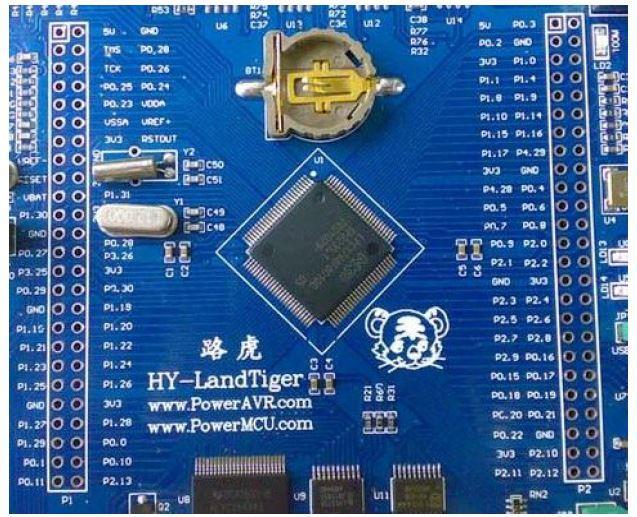
12 Licznik w µc Podłącz wyjście przetwornika do wejścia wychwytującego CAP2.1 układu czasowego LPC_TIM2 +3.3V U/f 3 P0.5 NXP LPC 1768 (ARM Cortex M3) Wyświetlacz graficzny Land Tiger 12
13 GPIO Wyświetlacz graficzny Mikrokontroler Mikrokontroler LPC 1768 DAC I2S PWM WDT ADC UART Rdzeń ARM Cortex M3 SPI CAN Ethernet DMA Impulsy wejściowe TIMER USB I2C RTC DAC Digital Analog Converter GPIO ADC Analog Digital Converter DMA UART Universal Asynchronous Receiver-Transmitter PWM CAN Controller Area Network WDT SPI Serial Peripheral Interface USB I2C Inter-Integrated Circuit I2S RTC Real Time Clock Ethernet General-Purpose Input/Output Direct Memory Access Pulse Width Modulation WatchDog Timer Universal Serial Bus Inter-IC Sound 13
14 Układ czasowy TIMER Cztery identyczne układy czasowe Timer/Counters. Każdy posiada dwa wejścia wychwytujące Capture oraz dwa wyjścia sygnalizacji zgodności Match. Liczniki 32-bitowe z programowalnym 32-bitowym układem wstępnego skalowania (prescaler). Dwa tryby pracy: licznik Counter lub układ czasowy Timer. Dwa kanały wychwytujące na każdy układ czasowy, tak aby możliwe było pobranie bieżącej wartości układ czasowego kiedy na wejściu wychwytującym zachodzi zmiana stanu. Cztery 32-bitowe rejestry porównujące (match registers), które umożliwiają: Ciągłą pracę układ czasowy z generacją przerwania w chwili osiągnięcia zgodności (match) zawartości układu z rejestrem porównującym, Zatrzymanie (Stop) układu czasowego w chwili osiągnięcia zgodności z(bez) generacją(i) przerwania Kasowanie (Reset) układu czasowego w chwili osiągnięcia zgodności z(bez) generacją(i) przerwania Cztery zewnętrzne wyjścia odpowiadające rejestrom porównującym o następujących akcjach gdy licznik główny osiągnie wartość przechowywaną w rejestrze porównawczym: Ustaw nisko Ustaw wysoko TIMER0 Zmień stan na przeciwny Przerwanie Nie zmieniaj stanu TIMER Impulsy wejściowe CAP2.1 TIMER TIMER
15 Licznik w µc TIMER0 pracuje w trybie układu czasowego wyznaczającego czas otwarcia bramki TIMER2 pracuje w trybie licznika zliczającego zbocza narastające impulsów przychodzących na wejście CAP2.1 int main (void) { uint32_t TimerInterval; SystemInit(); SystemCoreClockUpdate(); TimerInterval = SystemCoreClock; //1s lcdinit(); init_counter2_ch1(); init_timer(0, TimerInterval); while (1) { } } void TIMER0_IRQHandler (void) { int k; int del = 127; uint32_t val; LPC_TIM0->TCR = 0x0000; //stop timer LPC_TIM2->TCR = 0x0000; //stop counter LPC_TIM0->IR = 1; //clear interrupt flag val = LPC_TIM2->TC; //take current value //clear display for (k=0; k < 7; k++) printf("%c",del); //set white colour and posinion for first digit colour = LCDWhite; posx = 76; //display current value printf("%d", val); LPC_TIM2->TCR = 0x0002; //reset counter LPC_TIM2->TCR = 0x0001; //start counter LPC_TIM0->TCR = 0x0001; //start timer //set black colour and position for first digit posx = 76; colour = LCDBlack; return; } 15

16 LPC 1768 impulsy GND 16
17 Licznik - FPGA Podłącz wyjście przetwornika do wejścia licznika BCD z wyświetlaczem LCD przygotowanym na płycie FPGA. +3.3V U/f 3 V14 FPGA LCD Spartan 3AN starter kit Implementacja licznika 17
18 Matrycowy moduł LCD E RW RS BF Wyświetlacz LCD CG RAM DD RAM DB[7:0] Licznik Adresu Rejestr Danych BF Busy Flag znacznik zajętości magistrali Rejestr Komendy typ HD
![Licznik - FPGA clk rst FPGA E RW RS DB [7:0] Sterowanie LCD 4 4 4 Licznik BCD 4 in Detektor](/docs-images/100/144827533/images/19-0.jpg "zbocza narastającego Licznik Modulo 10 Licznik Modulo 10 Licznik Modulo 10 Licznik Modulo")
19 Licznik - FPGA clk rst FPGA E RW RS DB [7:0] Sterowanie LCD Licznik BCD 4 in Detektor zbocza narastającego Licznik Modulo 10 Licznik Modulo 10 Licznik Modulo 10 Licznik Modulo 10
 Poziomy kanał łączeniowy (Horizontal Routing Channel) Siatkowe FPGA składa się z matrycy konfigurowalnych bloków logiki (Configurable Logic Blocks - CLBs), z których")
20 Blok wejściowowyjściowy (I/O Block IOB) Pionowy kanał łączeniowy (Vertical Routing Channel) Konfigurowalny blok logiczny (Configurable Logic Block CLB) Element kluczujący (Switch Box - SB) Element łączący (Connection Box - CB) Poziomy kanał łączeniowy (Horizontal Routing Channel) Siatkowe FPGA składa się z matrycy konfigurowalnych bloków logiki (Configurable Logic Blocks - CLBs), z których każdy składa się z klastra podstawowych Elektroniczna Aparatura elementów Dozymetryczna, logicznych (Basic Logic Elements -BLEs)., które 20 składają się z pamięci podręcznej (Look-Up Table) iwfiis, przerzutnika AGH (Flip-Flop).
21 Architektura FPGA Siatkowe FPGA składa się z matrycy konfigurowalnych bloków logiki (Configurable Logic Blocks - CLBs), z których każdy składa się z klastra podstawowych elementów logicznych (Basic Logic Elements -BLEs), które składają się z pamięci podręcznej (Look-Up Table) i przerzutnika (Flip-Flop). Elementy kluczujące (Switch boxes - SB) łączą poziome i pionowe ścieżki sieci połączeniowej. Elementy łączące (Connection Boxes CB) łączą bloki logiczne CLB i bloki wejścia-wyjścia IOB z sąsiadującymi ścieżkami sieci połączeniowej. Sieć połączeniowa FPGA zajmuje 80-90% powierzchni układu. Powierzchnia logiki zajmuje 10-20%. Elastyczność FPGA zależy głównie od jego programowalnej sieci połączeniowej. Dlatego mówi się też o architekturze wyspowej wyspy logiki w morzu zasobów połączeniowych. 21

22 Switch Box Switch Box Connection Box Switch Box Switch Box Zasoby połączeniowe wokół jednego bloku CLB z segmentami śćieżek długości 1 22

23 Spartan-3AN System Gates Equivalent Logic Cells CLBs Slices Maksymalna liczba linii I/O XC3S700AN 700k V14 GND Źródło impulsów 23
24 Liczba CLB: n CLB = szt. Jeden CLB składa się z czterech SLICE-ów: Liczba SLICE: n SLICE = n CLB 4 = szt. XC3S700AN Jeden SLICE składa się z dwóch komórek logicznych LC: Liczba LC: n LC = n SLICE 2 = szt. Równoważna komórka logiczna ELC jest obliczana ze współczynnikiem 1,125: Liczba ELC: n ELC = 1,125 n LC = szt. Liczba bramek systemowych wynika ze skomplikowanych przeliczeń poszczególnych elementów układu na dwuwejściowe bramki NAND i ma charakter raczej marketingowy. Spartan-3AN System Gates Equivalent Logic Cells CLBs Slices Maksymalna liczba linii I/O XC3S700AN 700k
25 Licznik - FPGA Model licznika modulo 10 napisany w języku Verilog `timescale 1ns / 1ps ///////////// module cnt_modulo10 (input clk, rst, en, output reg [3:0] dig_out); clk, posedge rst) if(rst) dig_out <= 4'b0000; else if(en) if(dig_out == 4'b1001) dig_out <= 4'b0000; else dig_out <= dig_out + 4'b0001; endmodule 25

26 Model RTL w HDL Synteza logiczna Przebieg konfiguracji Mapowanie technologii Klastrowanie Rozmieszczanie Wyznaczania tras połączeń Generacja strumienia bitowego strumień bitowy 26
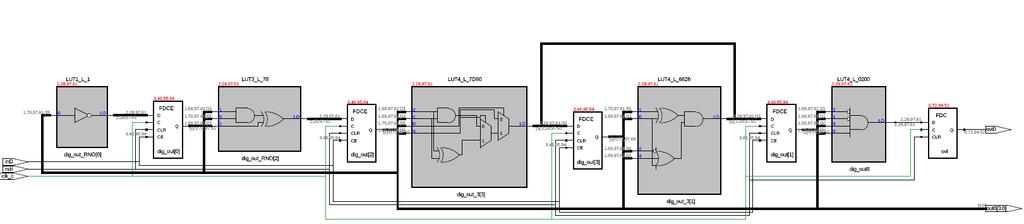
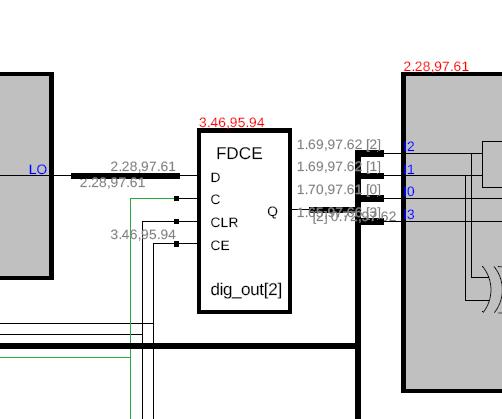
27 Automatyczna synteza licznika BCD Narzędzie: Synplify 27
Liczniki z zastosowaniem
 Liczniki z zastosowaniem FPGA i µc Fizyka Medyczna, studia II stopnia, Dozymetria i elektronika w medycynie 1 Liczniki Rodzaje implementacji: Układy średniej skali integracji MSI Mikrokontroler Układ FPGA
Liczniki z zastosowaniem FPGA i µc Fizyka Medyczna, studia II stopnia, Dozymetria i elektronika w medycynie 1 Liczniki Rodzaje implementacji: Układy średniej skali integracji MSI Mikrokontroler Układ FPGA
napięcie-częstotliwość
 Przetwornik napięcie-częstotliwość Czytnik TLD Fizyka Medyczna, studia II stopnia, Dozymetria i elektronika w medycynie 1 Czytnik TLD RA 94 2 Czytnik TLD RA 94 FOT PIF ZWN PLT PTW Fotopowielacz Przetwornik
Przetwornik napięcie-częstotliwość Czytnik TLD Fizyka Medyczna, studia II stopnia, Dozymetria i elektronika w medycynie 1 Czytnik TLD RA 94 2 Czytnik TLD RA 94 FOT PIF ZWN PLT PTW Fotopowielacz Przetwornik
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Elektroniczny sejf hotelowy
 Elektroniczny sejf hotelowy Laboratorium Języków Opisu Sprzętu AGH WFiIS 1 Konstrukcja Układ zbudowany jest z: Enkodera obrotowego, Wyświetlacza dwucyfrowego, Dwóch przycisków, Czujnika otwarcia drzwi
Elektroniczny sejf hotelowy Laboratorium Języków Opisu Sprzętu AGH WFiIS 1 Konstrukcja Układ zbudowany jest z: Enkodera obrotowego, Wyświetlacza dwucyfrowego, Dwóch przycisków, Czujnika otwarcia drzwi
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Sterowanie wyświetlacza LCD typu HD44780
 Sterowanie wyświetlacza LCD typu HD4478 Laboratorium Języków Opisu Sprzętu AGH WFiIS Wyświetlacz LCD Matrycowy moduł LCD E RW RS BF Wyświetlacz LCD CG RAM DD RAM DB[7:] Licznik Adresu Rejestr Danych Rejestr
Sterowanie wyświetlacza LCD typu HD4478 Laboratorium Języków Opisu Sprzętu AGH WFiIS Wyświetlacz LCD Matrycowy moduł LCD E RW RS BF Wyświetlacz LCD CG RAM DD RAM DB[7:] Licznik Adresu Rejestr Danych Rejestr
Programowany układ czasowy
 Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW
 POLITECHNIKA POZNAŃSKA FILIA W PILE LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW numer ćwiczenia: data wykonania ćwiczenia: data oddania sprawozdania: OCENA: 6 21.11.2002 28.11.2002 tytuł ćwiczenia: wykonawcy:
POLITECHNIKA POZNAŃSKA FILIA W PILE LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW numer ćwiczenia: data wykonania ćwiczenia: data oddania sprawozdania: OCENA: 6 21.11.2002 28.11.2002 tytuł ćwiczenia: wykonawcy:
(przykład uogólniony)
") Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 4
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Układów Logicznych kod kursu: ETD6203. Komunikacja z układami cyfrowymi W dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Programowany układ czasowy APSC
 Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Ochrona własności intelektualnej projektów w układach FPGA poprzez szyfrowanie danych konfiguracyjnych
 Ochrona własności intelektualnej projektów w układach FPGA poprzez szyfrowanie danych konfiguracyjnych (Na przykładzie projektowania układów sterujacych) Grzegorz Łabiak i Marek Węgrzyn Instytut Informatyki
Ochrona własności intelektualnej projektów w układach FPGA poprzez szyfrowanie danych konfiguracyjnych (Na przykładzie projektowania układów sterujacych) Grzegorz Łabiak i Marek Węgrzyn Instytut Informatyki
Wykład 3. Przegląd mikrokontrolerów 8-bit: STM8
 Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Sprawozdanie z projektu MARM. Część druga Specyfikacja końcowa. Prowadzący: dr. Mariusz Suchenek. Autor: Dawid Kołcz. Data: r.
 Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
2. PRZERZUTNIKI I REJESTRY
 Technika cyfrowa i mikroprocesorowa w ćwiczeniach laboratoryjnych : praca zbiorowa / pod redakcją Jerzego Jakubca ; autorzy Ryszard Bogacz, Jerzy Roj, Janusz Tokarski. Wyd. 3. Gliwice, 2016 Spis treści
Technika cyfrowa i mikroprocesorowa w ćwiczeniach laboratoryjnych : praca zbiorowa / pod redakcją Jerzego Jakubca ; autorzy Ryszard Bogacz, Jerzy Roj, Janusz Tokarski. Wyd. 3. Gliwice, 2016 Spis treści
Budowa mikrokontrolera UC3C. - 3 rodzaje obudów
 Cechy układu UC3C - 32 bitowy mikrokontroler - zasilanie 5V lub 3,3V - moduł generecji impulsów PWM - FPU sprzetowy moduł wspomagania obliczeń - kontroler zdarzeń (PEVC- Peripheral Event Controller) -
Cechy układu UC3C - 32 bitowy mikrokontroler - zasilanie 5V lub 3,3V - moduł generecji impulsów PWM - FPU sprzetowy moduł wspomagania obliczeń - kontroler zdarzeń (PEVC- Peripheral Event Controller) -
Projektowanie Scalonych Systemów Wbudowanych VERILOG
 Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Podstawy Elektroniki dla Elektrotechniki. Liczniki synchroniczne na przerzutnikach typu D
 AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
Projektowanie układów FPGA. Żródło*6+.
 Projektowanie układów FPGA Żródło*6+. Programowalne układy logiczne W elektronice cyfrowej funkcjonują dwa trendy rozwoju: Specjalizowane układy scalone ASIC (ang. Application Specific Integrated Circuits)
Projektowanie układów FPGA Żródło*6+. Programowalne układy logiczne W elektronice cyfrowej funkcjonują dwa trendy rozwoju: Specjalizowane układy scalone ASIC (ang. Application Specific Integrated Circuits)
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory Timery i przerwania laboratorium: 03 autor: mgr inż. Katarzyna Smelcerz Kraków,
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory Timery i przerwania laboratorium: 03 autor: mgr inż. Katarzyna Smelcerz Kraków,
Systemy Czasu Rzeczywistego FPGA
 01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 04 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 04 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
Elektronika i techniki mikroprocesorowe
 Elektronika i techniki mikroprocesorowe Technika cyfrowa ZłoŜone one układy cyfrowe Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki Wydział Elektryczny, ul. Krzywoustego 2 PLAN WYKŁADU idea
Elektronika i techniki mikroprocesorowe Technika cyfrowa ZłoŜone one układy cyfrowe Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki Wydział Elektryczny, ul. Krzywoustego 2 PLAN WYKŁADU idea
Urządzenia peryferyjne procesora ColdFire
 Urządzenia peryferyjne procesora ColdFire 1 Moduł generatora sygnału zegarowego (Clock Module) 2 Generator z pętlą PLL (1) Pętla synchronizacji fazy, pętla sprzężenia fazowego, PLL (ang. Phase Locked Loop)
Urządzenia peryferyjne procesora ColdFire 1 Moduł generatora sygnału zegarowego (Clock Module) 2 Generator z pętlą PLL (1) Pętla synchronizacji fazy, pętla sprzężenia fazowego, PLL (ang. Phase Locked Loop)
Systemy Czasu Rzeczywistego FPGA
 01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 05 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 05 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Laboratorium Podstaw Techniki Cyfrowej
 Laboratorium Podstaw Techniki Cyfrowej Ćwiczenie 5: Wprowadzenie do języków opisu sprzętu 1. Języki opisu sprzętu Języki opisu sprzętu(hdl Hardware Description Language) to języki słuŝące do opisu układów
Laboratorium Podstaw Techniki Cyfrowej Ćwiczenie 5: Wprowadzenie do języków opisu sprzętu 1. Języki opisu sprzętu Języki opisu sprzętu(hdl Hardware Description Language) to języki słuŝące do opisu układów
Ćw. 7: Układy sekwencyjne
 Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
LCD (Liquid Crystal Display)
") LCD (Liquid Crystal Display) Polarizing filter. Thin film with a vertical ais. Liquid crystal Polarizing filter. Thin film with a horizontal ais. Polarizing filter. Thin film with a horizontal ais. Polarizing
LCD (Liquid Crystal Display) Polarizing filter. Thin film with a vertical ais. Liquid crystal Polarizing filter. Thin film with a horizontal ais. Polarizing filter. Thin film with a horizontal ais. Polarizing
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Systemy na Chipie. Robert Czerwiński
 Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory DMA (Direct Memory Access) laboratorium: 05 autor: mgr inż. Katarzyna Smelcerz
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory DMA (Direct Memory Access) laboratorium: 05 autor: mgr inż. Katarzyna Smelcerz
Komunikacja w mikrokontrolerach. Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski
 Komunikacja w mikrokontrolerach Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Treść kursu Programowanie mikrokontrolerów AVR (ATMEL) Orientacja na komunikację międzyukładową w C Literatura
Komunikacja w mikrokontrolerach Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Treść kursu Programowanie mikrokontrolerów AVR (ATMEL) Orientacja na komunikację międzyukładową w C Literatura
FPGA, CPLD, SPLD. Synteza systemów reprogramowalnych 1/27. dr inż. Mariusz Kapruziak mkapruziak@wi.ps.pl pok. 107, tel. 449 55 44
 Synteza systemów reprogramowalnych /27 dr inż. Mariusz Kapruziak mkapruziak@wi.ps.pl pok. 07, tel. 449 55 44 FPGA, CPLD, SPLD 945 950 955 960 965 970 975 980 985 990 995 2000 0 D CLK update v cur Q Q 0
Synteza systemów reprogramowalnych /27 dr inż. Mariusz Kapruziak mkapruziak@wi.ps.pl pok. 07, tel. 449 55 44 FPGA, CPLD, SPLD 945 950 955 960 965 970 975 980 985 990 995 2000 0 D CLK update v cur Q Q 0
Automatyzacja i robotyzacja procesów produkcyjnych
 Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Liczniki, rejestry lab. 07 Układy sekwencyjne cz. 1
 Liczniki, rejestry lab. 07 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
Liczniki, rejestry lab. 07 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
Ćw. 9 Przerzutniki. 1. Cel ćwiczenia. 2. Wymagane informacje. 3. Wprowadzenie teoretyczne PODSTAWY ELEKTRONIKI MSIB
 Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Laboratorium Asemblerów, WZEW, AGH WFiIS Tester NMOS ów
 Pomiar charakterystyk prądowonapięciowych tranzystora NMOS Napisz program w asemblerze kontrolera picoblaze wykorzystujący możliwości płyty testowej ze Spartanem 3AN do zbudowania prostego układu pomiarowego
Pomiar charakterystyk prądowonapięciowych tranzystora NMOS Napisz program w asemblerze kontrolera picoblaze wykorzystujący możliwości płyty testowej ze Spartanem 3AN do zbudowania prostego układu pomiarowego
Model programowy procesora ColdFire
 Model programowy procesora ColdFire 1 Model programowy procesora ColdFire 2 Kolejność bajtów w pamięci (1) Bajt najmniejsza adresowalna jednostka pamięci komputerowej Endianess Big-endian middle-endian
Model programowy procesora ColdFire 1 Model programowy procesora ColdFire 2 Kolejność bajtów w pamięci (1) Bajt najmniejsza adresowalna jednostka pamięci komputerowej Endianess Big-endian middle-endian
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Ćwiczenie 27C. Techniki mikroprocesorowe Badania laboratoryjne wybranych układów synchronicznych
 Ćwiczenie 27C Techniki mikroprocesorowe Badania laboratoryjne wybranych układów synchronicznych Cel ćwiczenia Poznanie budowy i zasad działania oraz właściwości układów synchronicznych, aby zapewnić podstawy
Ćwiczenie 27C Techniki mikroprocesorowe Badania laboratoryjne wybranych układów synchronicznych Cel ćwiczenia Poznanie budowy i zasad działania oraz właściwości układów synchronicznych, aby zapewnić podstawy
Język HDL - VERILOG. (Syntetyzowalna warstwa języka) Hardware Description Language Krzysztof Jasiński PRUS PRUS
 Hardware Description Language Krzysztof Jasiński PRUS PRUS") Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
Układy sekwencyjne. Podstawowe informacje o układach cyfrowych i przerzutnikach (rodzaje, sposoby wyzwalania).
.") Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
ZASTOSOWANIA UKŁADÓW FPGA W ALGORYTMACH WYLICZENIOWYCH APPLICATIONS OF FPGAS IN ENUMERATION ALGORITHMS
 inż. Michał HALEŃSKI Wojskowy Instytut Techniczny Uzbrojenia ZASTOSOWANIA UKŁADÓW FPGA W ALGORYTMACH WYLICZENIOWYCH Streszczenie: W artykule przedstawiono budowę oraz zasadę działania układów FPGA oraz
inż. Michał HALEŃSKI Wojskowy Instytut Techniczny Uzbrojenia ZASTOSOWANIA UKŁADÓW FPGA W ALGORYTMACH WYLICZENIOWYCH Streszczenie: W artykule przedstawiono budowę oraz zasadę działania układów FPGA oraz
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur. Piotr Fita
 Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe. Platforma sprzętowa. Rajda & Kasperek 2014 Katedra Elektroniki AGH 1
 Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe Platforma sprzętowa Rajda & Kasperek 2014 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6
Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe Platforma sprzętowa Rajda & Kasperek 2014 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Podstawowe elementy układów cyfrowych układy sekwencyjne. Rafał Walkowiak
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Programowanie Układów Logicznych kod kursu: ETD6203 W dr inż. Daniel Kopiec. Pamięć w układach programowalnych
 Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 6.4.26 dr inż. Daniel Kopiec Plan wykładu Pamięć w układach programowalnych Zasada działania, podział pamięci Miara
Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 6.4.26 dr inż. Daniel Kopiec Plan wykładu Pamięć w układach programowalnych Zasada działania, podział pamięci Miara
Modelowanie liczników w języku Verilog i ich implementacja w strukturze FPGA
 Modelowanie liczników w języku Verilog i ich implementacja w strukturze FPGA Licznik binarny Licznik binarny jest najprostszym i najpojemniejszym licznikiem. Kod 4 bitowego synchronicznego licznika binarnego
Modelowanie liczników w języku Verilog i ich implementacja w strukturze FPGA Licznik binarny Licznik binarny jest najprostszym i najpojemniejszym licznikiem. Kod 4 bitowego synchronicznego licznika binarnego
Charakterystyka mikrokontrolerów
 Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Programowalne scalone układy cyfrowe PLD, CPLD oraz FPGA
 Programowalne scalone układy cyfrowe PLD, CPLD oraz FPGA Ogromną rolę w technice cyfrowej spełniają układy programowalne, często określane nazwą programowalnych modułów logicznych lub krótko hasłem FPLD
Programowalne scalone układy cyfrowe PLD, CPLD oraz FPGA Ogromną rolę w technice cyfrowej spełniają układy programowalne, często określane nazwą programowalnych modułów logicznych lub krótko hasłem FPLD
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Systemy Czasu Rzeczywistego FPGA
 01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 03 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 03 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
Programowalne układy logiczne kod kursu: ETD Układy sekwencyjne W
 Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
 Inkubator AVR Podstawy obsługi i programowania mikrokontrolerów rodziny. CZĘŚĆ I. Wprowadzenie i hardware Co na temat AVR każdy wiedzieć powinien? Producent: ATMEL (www.atmel.com) Instrukcje wykonywane
Inkubator AVR Podstawy obsługi i programowania mikrokontrolerów rodziny. CZĘŚĆ I. Wprowadzenie i hardware Co na temat AVR każdy wiedzieć powinien? Producent: ATMEL (www.atmel.com) Instrukcje wykonywane
Ćwiczenie MMLogic 002 Układy sekwencyjne cz. 2
 Ćwiczenie MMLogic 002 Układy sekwencyjne cz. 2 TECHNIKA MIKROPROCESOROWA 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA WWW.AGH.EDU.PL
Ćwiczenie MMLogic 002 Układy sekwencyjne cz. 2 TECHNIKA MIKROPROCESOROWA 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA WWW.AGH.EDU.PL
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Przerzutniki. Układy logiczne sekwencyjne odpowiedź zależy od stanu układu przed pobudzeniem
 2-3-29 Przerzutniki Układy logiczne sekwencyjne odpowiedź zależy od stanu układu przed pobudzeniem (dotychczas mówiliśmy o układach logicznych kombinatorycznych - stan wyjść określony jednoznacznie przez
2-3-29 Przerzutniki Układy logiczne sekwencyjne odpowiedź zależy od stanu układu przed pobudzeniem (dotychczas mówiliśmy o układach logicznych kombinatorycznych - stan wyjść określony jednoznacznie przez
start Program mikroprocesorowego miernika mocy generowanej $crystal = deklaracja
 ----------------------------start---------------------------- Program mikroprocesorowego miernika mocy generowanej $crystal = 8000000 deklaracja częstotliwości kwarcu taktującego uc $regfile "m8def.dat"
----------------------------start---------------------------- Program mikroprocesorowego miernika mocy generowanej $crystal = 8000000 deklaracja częstotliwości kwarcu taktującego uc $regfile "m8def.dat"
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy
 PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 4.4.28 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Powtórka wiadomości Pamięć w układach
Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 4.4.28 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Powtórka wiadomości Pamięć w układach
Ćwiczenie 7 Matryca RGB
 IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Systemy Czasu Rzeczywistego FPGA
 01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 06 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 06 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 Analiza czasowa W8 17.04.2019 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Zależności czasowe w układach programowalnych Pojęcia
Programowanie Układów Logicznych kod kursu: ETD6203 Analiza czasowa W8 17.04.2019 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Zależności czasowe w układach programowalnych Pojęcia
W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres
 PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1
 Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
System mikroprocesorowy i peryferia. Dariusz Chaberski
 System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
Kierunek Elektronika, III rok Języki Opisu Sprzętu. Platforma sprzętowa. Rajda & Kasperek 2016 Katedra Elektroniki AGH 1
 Kierunek Elektronika, III rok Języki Opisu Sprzętu Platforma sprzętowa Rajda & Kasperek 2016 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6 Platforma Digilent
Kierunek Elektronika, III rok Języki Opisu Sprzętu Platforma sprzętowa Rajda & Kasperek 2016 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6 Platforma Digilent
Kurs programowania mikrokontrolerów ARM z rodziny Cortex-M3
 Kurs programowania mikrokontrolerów ARM z rodziny Cortex-M3 organizowany przez: Koło Naukowe Mikrosystemów ONYKS we współpracy z: Wydawnictwem BTC Polskim przedstawicielstwem STMicroelectronics Plan spotkania
Kurs programowania mikrokontrolerów ARM z rodziny Cortex-M3 organizowany przez: Koło Naukowe Mikrosystemów ONYKS we współpracy z: Wydawnictwem BTC Polskim przedstawicielstwem STMicroelectronics Plan spotkania
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Listing_ $crystal = deklaracja
 ------------------------------------------------- Listing_4 ---------------------------------------------------- $crystal = 8000000 deklaracja częstotliwości kwarcu $regfile "m8def.dat" biblioteka mikrokontrolera
------------------------------------------------- Listing_4 ---------------------------------------------------- $crystal = 8000000 deklaracja częstotliwości kwarcu $regfile "m8def.dat" biblioteka mikrokontrolera
Opis przedmiotu zamówienia CZĘŚĆ 1
 Opis przedmiotu zamówienia CZĘŚĆ 1 Stanowiska do badań algorytmów sterowania interfejsów energoelektronicznych zasobników energii bazujących na układach programowalnych FPGA. Stanowiska laboratoryjne mają
Opis przedmiotu zamówienia CZĘŚĆ 1 Stanowiska do badań algorytmów sterowania interfejsów energoelektronicznych zasobników energii bazujących na układach programowalnych FPGA. Stanowiska laboratoryjne mają
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
Parametryzacja przetworników analogowocyfrowych
 Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Programowalne układy logiczne
 Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
dwójkę liczącą Licznikiem Podział liczników:
 1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.