Raport Robot mobilny klasy micromouse. Adrian Gałęziowski Paweł Urbaniak
|
|
|
- Jarosław Zając
- 9 lat temu
- Przeglądów:
Transkrypt
1 Raport Robot mobilny klasy micromouse Adrian Gałęziowski Paweł Urbaniak Wrocław, 12 marca 2013

2 Spis treści 1. Założenia projektu Model w programie Autodeksk Inventor Konstrukcja mechaniczna Konstrukcja elektroniczna Algorytm Problemy Planowane modyfikacje

3 1. Założenia projektu Celem projektu było zbudowanie robota mobilnego klasy 2.0, typu micromouse, który mógłby z powodzeniem rywalizować z podobnymi konstrukcjami na zawodach robotów. Robota udało mi się ukończyć przed zawodami Robotic Arena 2012, co pozwoliło na sprawdzenie konstrukcji podczas zawodów. Niniejszy raport ma na celu przedstawienie kolejnych etapów budowy robota począwszy od modelów 3D w programie Autodesk Inventor, aż po finalną konstrukcję. 2. Model w programie Autodeksk Inventor. Pracę nad projektem rozpocząłem od wykonania kilku modeli 3D w programie Autodesk Inventor, w celu wybrania najlepszej koncepcji co do kształtu robota, a także żeby mieć pewność, że wszystkie zaplanowane elementy zmieszczą się w konstrukcji robota. Poniżej prezentuje kolejne stadia projektu. Rysunek 1. Wczesne stadium - pierwsza koncepcja na wygląd robota. 2

4 Rysunek 2. Drugi projekt. Rysunek 3. Ostateczna wersja. 3

5 W pierwszym założeniu robot był krótki, ale zbyt szeroki, co pozostawiałoby mu bardzo mały margines błędu podczas pokonywania zakrętów. W drugiej konstrukcji robot został znacząco wydłużony, jednakże całościowo był zbyt duży. Ostatecznie robot został skrócony i maksymalnie zwężony do minimalnej szerokości wyznaczonej przez silniki i enkodery, które zostały zaplanowane pomiędzy silnikami. Ostateczne wymiary robota są następujące: 10cm x 10 cm. 3. Konstrukcja mechaniczna. Bazę dla całej konstrukcji robota stanowi jego płytka z elektroniką. W robotach micromouse jednym z ważniejszych parametrów jest niska masa, stąd decyzja o zrezygnowaniu z płytki bazowej. Silniki zostały podniesione o ok. 3mm i zamocowane na dodatkowej płytce z pleksiglasu, w celu obniżenia prześwitu robota. Dzięki temu uzyskałem również miejsce na moduł bleutooth, który został umieszczony pod silnikami. Płytki z enkoderami zostały przyklejone do płytki z pleksiglasu. Pomiędzy nimi została umieszczona płytka antymagnetyczna w celu wykluczenia występujących zakłóceń pomiędzy enkoderami. Do napędu robota posłużyły silniki Pololu z przekładnią 10:1 (1000 obr/min), zapewniając mu bardziej niż wystarczające osiągi. Powszechnie dostępne koła modelarskie zapewniają stosunkowo słabą przyczepność, dlatego koła zostały wykonane samodzielnie, z użyciem sylikonu sanitarnego, który spisywał się bardzo dobrze przy wysokich prędkościach zapewnianych przez silniki (Vmax = 3m/s) Rysunek 4. Dexter. 4

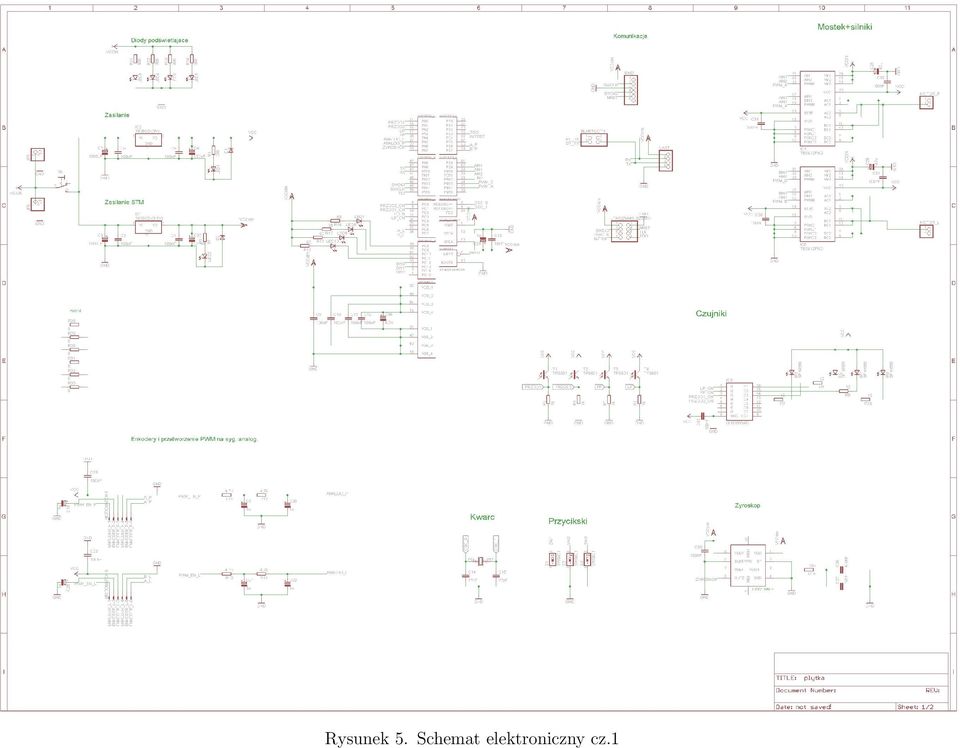
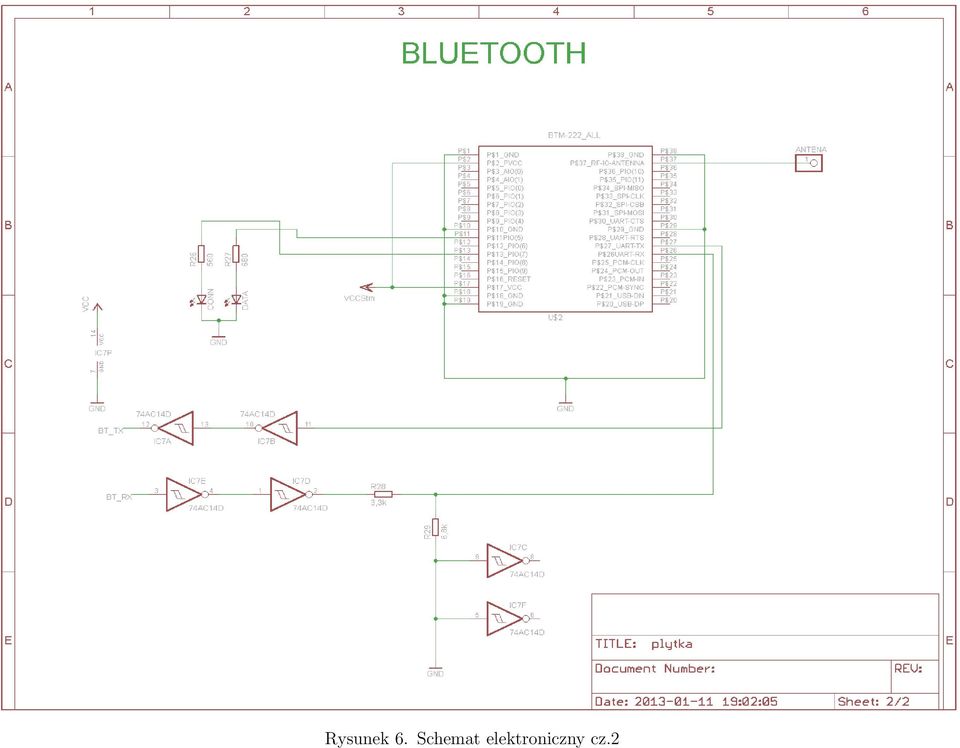
6 4. Konstrukcja elektroniczna. 1. Mikroprocesor. Micromouse potrzebuje procesora o dużej mocy obliczeniowej, który byłby wstanie na bieżąco aktualizować mapę labiryntu, obliczać sterowanie dla silników i obsługiwać wszystkie peryferia, w szczególności enkodery. Wybór padł na procesor z rdzeniem Cortex-M3 - STM32F103RBT6. Kilka parametrów technicznych, które zdecydowały o wyborze: Maksymalna częstotliwość pracy: 72 MHz; 128 kb Flash; 20 kb RAM; Minimalny czas przetwarzania ADC: 1µs; Sprzętowa obsługa enkoderów. 2. Enkodery. Do pomiaru przemieszczenia robota użyłem enkoderów magnetycznych AS5040, które mierzą przemieszczenie z rozdzielczością 10 bitów zapewniając 1024 tiki na jeden obrót koła. Enkodery współpracują z magnesami AS5000-MD6H-2 zalecanymi przez producenta. 3. Żyroskop. W celu dokładniejszego pomiaru kąta obrotu robot został wyposażony w żyroskop analogowy LY3200ALH, który potrafi zmierzyć maksymalną prędkość obrotu na poziomie 2000dps. 4. Czujniki. Czujniki do wykrywania ścian zostały również wykonane samodzielnie na podstawie podczerwonej diody nadawczej SFH4550 emitującej falę o długości 850nm oraz fototranzystora SFH Komunikacja. W robocie istnieje możliwość komunikacji trzema różnymi sposobami, za pomocą interfejsu SWD, JTAG oraz bezprzewodowo za pomocą modułu bluetooth BTM-222. Poniżej zamieszczam schemat elektroniczny robota: 5

7 Rysunek 5. Schemat elektroniczny cz.1
8 Rysunek 6. Schemat elektroniczny cz.2
9 5. Algorytm. Podstawowym elementem robota micromouse poza przemyślaną i zwartą konstrukcją mechaniczną jest optymalny pod względem szybkości i jakości działania algorytm rozwiązywania labiryntu. W robocie został zaimplementowany algorytm zalewania wodą (Bellmana - Forda). Główną idą tego algorytmu jest przypisanie każdemu z pól w labiryncie odpowiedniej wartości liczbowej. Wiąże się to z dużą złożonością pamięciową jak na możliwości mikroprocesorów, ponieważ potrzebujemy tablicy 256 bajtowej do przechowywania wag każdego z pól oraz kolejnej tablicy 256 bajtowej do przechowywania informacji o położeniu ścian w dane komórce oraz innych informacji, które uznamy za niezbędne. Jak wiadomo każdy bajt ma 8 bitów, więc taka tablica powinna nam w zupełności wystarczyć do przechowywania wszystkich niezbędnych informacji. 1. Zasada wypełniania tablicy Algorytm przypisuje wartość 0 środkowi labiryntu. Następnie każdemu sąsiadowi danej komórki, który nie jest oddzielony ścianą przypisujemy wartość o 1 większą. W ten sposób przechodzimy po wszystkich polach tablicy. Procedura ta musi być powtórzona w momencie gdy robot wykryje kolejną ścianę w labiryncie podczas przejazdu rozpoznawczego. W ten sposób poruszając się od kwadratu o największej wartości do najmniejszej otrzymujemy najkrótszą drogę do celu. 2. Droga do celu W momencie, gdy robot zbada cały labirynt otrzymujemy najkrótszą, ale nie niekoniecznie najszybszą drogę do celu. Robot w każdym ruchu powinien wykonać nastepujące czynności: 1) Z a k t u a l i z u j mapę ś c i a n. 2) Z a k t u a l i z u j t a b l i c ę wag poszczególnych pól. 3) Zdecyduj, który z sąsiadów danego pola ma najmniejszą wartość o d l e g ł o ś c i. 4) Przejdź do pola, o n a j m n i e j s z e j w a r t o ś c i o d l e g ł o ś c i. 6. Problemy. Podczas tworzenia konstrukcji jak i podczas zawodów spotkałem się z następującymi problemami. Poniżej prezentuję krótki opis problemu oraz moje własne pomysły na jego rozwiązanie. 8

10 1. Czujniki. Najwięcej problemów podczas zawodów sprawiły czujniki, które wykazują brak odporności na zmienne oświetlenie. Z tego powodu robot nie był również w stanie dojechać do środka labiryntu podczas zawodów. Planuję poprawić obecnie zaimplementowany pomiar różnicowy, który w obecnej postaci nie spełnia swojego zadania. Dodatkowo chcę wprowadzić dynamiczne ustawianie wszystkich progów, a nie tylko niektórych jak to ma miejsce obecnie, przed starterem robota. 2. Resetowanie mikroprocesora. Znacznie większym problemem jest resetowanie się mikroprocesora. Podejrzewam, że obecnie zaimplementowany algorytm obliczania ścieżki powinien zostać zoptymalizowany, przede wszystkim operacje na tablicach powinny zostać zastąpione operacjami na stosie. Ponadto resetowanie następuje w momencie zerowania zmiennych odpowiadających za pomiar przemieszczania, należy więc zmienić moment resetowania tych zmiennych. 7. Planowane modyfikacje. 1. Uruchomienie komunikacji bluetooth z laptopem, ponieważ z powodu problemów sprzętowym z laptopem możliwa jest jedynie komunikacja z telefonem komórkowym. 2. Optymalizacja algorytmu zalewania wodą. Nie jest konieczne przeglądanie całej tablicy po wykryciu nowej ścianki. Wystarczy jedynie zaktualizować tę część labiryntu, której ta ściana dotyczy. Przechowywanie labiryntu na stosie zamiast w tablicy. 9

Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Konstrukcja Micro Mouse
 Konstrukcja Micro Mouse Hubert Grzegorczyk 13 października 2016 Hubert Grzegorczyk Konstrukcja Micro Mouse 13 października 2016 1 / 8 Przykładowa konstrukcja Rysunek: Topowa konstrukcja japońska Min7.1
Konstrukcja Micro Mouse Hubert Grzegorczyk 13 października 2016 Hubert Grzegorczyk Konstrukcja Micro Mouse 13 października 2016 1 / 8 Przykładowa konstrukcja Rysunek: Topowa konstrukcja japońska Min7.1
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Micromouse Rapid Raport końcowy. Marcin Niestrój
 Micromouse Rapid Raport końcowy Marcin Niestrój Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 22 stycznia 2013 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja mechaniczna 2 2.1 Podwozie.............................
Micromouse Rapid Raport końcowy Marcin Niestrój Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 22 stycznia 2013 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja mechaniczna 2 2.1 Podwozie.............................
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Raport z budowy robota Krzysio
 Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Linefollower Torpeda. Magdalena Kaczorowska
 Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
Robot micromouse Rzuf nincza. Hubert Grzegorczyk
 Robot micromouse Rzuf nincza Hubert Grzegorczyk Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 3 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Micromouse Rzuf Nincza 2 2.1 Mechanika.............................
Robot micromouse Rzuf nincza Hubert Grzegorczyk Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 3 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Micromouse Rzuf Nincza 2 2.1 Mechanika.............................
MozhePoyedzye. Robot klasy MiniSumo. Konrad Bednarek Michał Rataj
 MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU
 P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
TIGER Autonomiczny robot mobilny typu Line Follower
 TIGER Autonomiczny robot mobilny typu Line Follower Sebastian Sadurski Marcin Stolarek Koło Naukowe Robotyków KoNaR Wrocław, 2012r. 1.Wstęp...3 2.Konstrukcja robota...3 3.Zasilanie...5 4.Mikrokontroler
TIGER Autonomiczny robot mobilny typu Line Follower Sebastian Sadurski Marcin Stolarek Koło Naukowe Robotyków KoNaR Wrocław, 2012r. 1.Wstęp...3 2.Konstrukcja robota...3 3.Zasilanie...5 4.Mikrokontroler
REGULAMIN KONKURSU WIEDZY TECHNICZNEJ W ZAKRESIE PROJEKTOWANIA I KONSTRUOWANIA ROBOTA W KATEGORII MICROMOUSE
 REGULAMIN KONKURSU WIEDZY TECHNICZNEJ W ZAKRESIE PROJEKTOWANIA I KONSTRUOWANIA 1. Informacje ogólne ROBOTA W KATEGORII MICROMOUSE 1. Celem konkursu jest sprawdzenie wiedzy technicznej w zakresie projektowania
REGULAMIN KONKURSU WIEDZY TECHNICZNEJ W ZAKRESIE PROJEKTOWANIA I KONSTRUOWANIA 1. Informacje ogólne ROBOTA W KATEGORII MICROMOUSE 1. Celem konkursu jest sprawdzenie wiedzy technicznej w zakresie projektowania
REGULAMIN ZAWODÓW ROBOTÓW Robotic Arena 2016
 REGULAMIN ZAWODÓW ROBOTÓW Robotic Arena 2016 Kategoria MicroMouse 8 x 8 Koło Naukowe Robotyków KoNaR Wydział Elektroniki Politechnika Wrocławska Rozdział I Postanowienia ogólne 1 1. Niniejszy dokument
REGULAMIN ZAWODÓW ROBOTÓW Robotic Arena 2016 Kategoria MicroMouse 8 x 8 Koło Naukowe Robotyków KoNaR Wydział Elektroniki Politechnika Wrocławska Rozdział I Postanowienia ogólne 1 1. Niniejszy dokument
Autonomiczny robot mobilny LF3 klasy linefollower. Jacek Jankowski
 Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
- WALKER Czteronożny robot kroczący
 - WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
- WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
Robot mobilny klasy mini-sumo Żubr
 Robot mobilny klasy mini-sumo Żubr Autorzy: Grzegorz Biziel Marcin Motowidło Jan Słowik 1. Założenia i cel projektu. Głównym celem projektu było skonstruowanie robota spełniającego kryteria klasy robotów
Robot mobilny klasy mini-sumo Żubr Autorzy: Grzegorz Biziel Marcin Motowidło Jan Słowik 1. Założenia i cel projektu. Głównym celem projektu było skonstruowanie robota spełniającego kryteria klasy robotów
Spis treści. Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
Raport z budowy robota mobilnego klasy minisumo Łotrzyk. Maciej Majka Mateusz Ciszek
 Raport z budowy robota mobilnego klasy minisumo Łotrzyk Maciej Majka Mateusz Ciszek Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie
Raport z budowy robota mobilnego klasy minisumo Łotrzyk Maciej Majka Mateusz Ciszek Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
PRACA DYPLOMOWA MAGISTERSKA
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania PRACA DYPLOMOWA MAGISTERSKA Konstrukcja autonomicznego robota mobilnego Małgorzata Bartoszewicz Promotor: prof. dr hab. inż. A. Milecki Zakres
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania PRACA DYPLOMOWA MAGISTERSKA Konstrukcja autonomicznego robota mobilnego Małgorzata Bartoszewicz Promotor: prof. dr hab. inż. A. Milecki Zakres
Temat: Sterowanie mobilnością robota z wykorzystaniem algorytmu logiki rozmytej
 Wrocław, 13.01.2016 Metody sztucznej inteligencji Prowadzący: Dr hab. inż. Ireneusz Jabłoński Temat: Sterowanie mobilnością robota z wykorzystaniem algorytmu logiki rozmytej Wykonał: Jakub Uliarczyk, 195639
Wrocław, 13.01.2016 Metody sztucznej inteligencji Prowadzący: Dr hab. inż. Ireneusz Jabłoński Temat: Sterowanie mobilnością robota z wykorzystaniem algorytmu logiki rozmytej Wykonał: Jakub Uliarczyk, 195639
Optymalizacja wież stalowych
 Optymalizacja wież stalowych W przypadku wież stalowych jednym z najistotniejszych elementów jest ustalenie obciążenia wiatrem. Generalnie jest to zagadnienie skomplikowane, gdyż wiąże się z koniecznością
Optymalizacja wież stalowych W przypadku wież stalowych jednym z najistotniejszych elementów jest ustalenie obciążenia wiatrem. Generalnie jest to zagadnienie skomplikowane, gdyż wiąże się z koniecznością
rh-p1 Bateryjny czujnik ruchu systemu F&Home RADIO.
 KARTA KATALOGOWA rh-p1 Bateryjny czujnik ruchu systemu F&Home RADIO. rh-p1 to niskoprądowy pasywny detektor ruchu. Czujnik wykrywa osoby poprzez detekcję zmian promieniowania podczerwonego. Każda zmiana
KARTA KATALOGOWA rh-p1 Bateryjny czujnik ruchu systemu F&Home RADIO. rh-p1 to niskoprądowy pasywny detektor ruchu. Czujnik wykrywa osoby poprzez detekcję zmian promieniowania podczerwonego. Każda zmiana
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011
 Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
ROBOT MOBILNY TYPU LINE FOLLOWER JACK. Michał Rybczyński
 ROBOT MOBILNY TYPU LINE FOLLOWER JACK Michał Rybczyński Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2011 Spis treści 1. Wstęp... 3 2. Konstrukcja mechaniczna... 4 3. Zasilanie... 5 4. Napęd...
ROBOT MOBILNY TYPU LINE FOLLOWER JACK Michał Rybczyński Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2011 Spis treści 1. Wstęp... 3 2. Konstrukcja mechaniczna... 4 3. Zasilanie... 5 4. Napęd...
rh-p1t1 Bateryjny czujnik ruchu z pomiarem temperatury otoczenia systemu F&Home RADIO.
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-p1t1 Bateryjny czujnik ruchu z pomiarem temperatury otoczenia systemu F&Home RADIO. 95-00 Pabianice, ul.
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-p1t1 Bateryjny czujnik ruchu z pomiarem temperatury otoczenia systemu F&Home RADIO. 95-00 Pabianice, ul.
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Robot mobilny klasy micromouse. IPreferPI. Elżbieta Bundz. Bartosz Wawrzacz. Koło Naukowe Robotyków KoNaR.
 Robot mobilny klasy micromouse IPreferPI Elżbieta Bundz Bartosz Wawrzacz Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2012 1 Spis treści 1. Wstęp...3 2. Założenia projektu...3 3. Konstrukcja
Robot mobilny klasy micromouse IPreferPI Elżbieta Bundz Bartosz Wawrzacz Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2012 1 Spis treści 1. Wstęp...3 2. Założenia projektu...3 3. Konstrukcja
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka
 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Zarządzanie pamięcią w systemie operacyjnym
 Zarządzanie pamięcią w systemie operacyjnym Cele: przydział zasobów pamięciowych wykonywanym programom, zapewnienie bezpieczeństwa wykonywanych procesów (ochrona pamięci), efektywne wykorzystanie dostępnej
Zarządzanie pamięcią w systemie operacyjnym Cele: przydział zasobów pamięciowych wykonywanym programom, zapewnienie bezpieczeństwa wykonywanych procesów (ochrona pamięci), efektywne wykorzystanie dostępnej
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Wstęp do użytkowania modeli GP2D12 i GP2Y0A02 Podstawowe informacje techniczne Testy praktyczne czujnika GP2Y0A02
 Koło naukowe KoNaR: Czujniki odległości firmy SHARP Wstęp do użytkowania modeli GP2D12 i GP2Y0A02 Podstawowe informacje techniczne Testy praktyczne czujnika GP2Y0A02 Bolesław Jodkowski (część I) Karol
Koło naukowe KoNaR: Czujniki odległości firmy SHARP Wstęp do użytkowania modeli GP2D12 i GP2Y0A02 Podstawowe informacje techniczne Testy praktyczne czujnika GP2Y0A02 Bolesław Jodkowski (część I) Karol
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
SIMSON. Raport. Robot moblilny klasy Line follower. Łukasz Kaźmierczak. Dawid Kwaśnik. Małgorzata Lewandowska. Wrocław, r.
 SIMSON Robot moblilny klasy Line follower Raport Łukasz Kaźmierczak Dawid Kwaśnik Małgorzata Lewandowska Wrocław, 06.03.2011 r. Spis treści 1. Wstęp...3 2. Założenia...3 3. Spis najważniejszych elementów...3
SIMSON Robot moblilny klasy Line follower Raport Łukasz Kaźmierczak Dawid Kwaśnik Małgorzata Lewandowska Wrocław, 06.03.2011 r. Spis treści 1. Wstęp...3 2. Założenia...3 3. Spis najważniejszych elementów...3
1. Kto wymyślił określenie robot?
 1. Kto wymyślił określenie robot? 1. Izaak Asimov 2. Leonardo da Vinci 3. Karel Capek 4. Mityczny Hefajstos 2. Ile jest czujników linii w robocie MAOR-12v2? 1. 2 2. 4 3. 6 4. 8 3. Koło ISKRA powstało:
1. Kto wymyślił określenie robot? 1. Izaak Asimov 2. Leonardo da Vinci 3. Karel Capek 4. Mityczny Hefajstos 2. Ile jest czujników linii w robocie MAOR-12v2? 1. 2 2. 4 3. 6 4. 8 3. Koło ISKRA powstało:
KAmodRPiADCDAC. Moduł przetwornika A/C i C/A dla komputerów RaspberryPi i RaspberryPi+
 Moduł przetwornika A/C i C/A dla komputerów RaspberryPi i RaspberryPi+ jest ekspanderem funkcjonalnym dla komputerów RaspberryPi oraz Raspberry Pi+ zapewniającym możliwość konwersji A/C i C/A z rozdzielczością
Moduł przetwornika A/C i C/A dla komputerów RaspberryPi i RaspberryPi+ jest ekspanderem funkcjonalnym dla komputerów RaspberryPi oraz Raspberry Pi+ zapewniającym możliwość konwersji A/C i C/A z rozdzielczością
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2013 CZĘŚĆ PRAKTYCZNA
 Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer zadania: 01 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Numer PESEL
Nazwa kwalifikacji: Eksploatacja urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.18 Numer zadania: 01 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Numer PESEL
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
HELMUT Robot klasy mini sumo
 HELMUT Robot klasy mini sumo Sprawozdanie z projektu Spis treści: 1. Opis projektu 2. Konstrukcja 3. Elektronika 4. Program 5. Wnioski, błędy i przemyślenia 1 Opis projektu. Celem projektu było zbudowanie
HELMUT Robot klasy mini sumo Sprawozdanie z projektu Spis treści: 1. Opis projektu 2. Konstrukcja 3. Elektronika 4. Program 5. Wnioski, błędy i przemyślenia 1 Opis projektu. Celem projektu było zbudowanie
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
Porównanie algorytmów wyszukiwania najkrótszych ścieżek międz. grafu. Daniel Golubiewski. 22 listopada Instytut Informatyki
 Porównanie algorytmów wyszukiwania najkrótszych ścieżek między wierzchołkami grafu. Instytut Informatyki 22 listopada 2015 Algorytm DFS w głąb Algorytm przejścia/przeszukiwania w głąb (ang. Depth First
Porównanie algorytmów wyszukiwania najkrótszych ścieżek między wierzchołkami grafu. Instytut Informatyki 22 listopada 2015 Algorytm DFS w głąb Algorytm przejścia/przeszukiwania w głąb (ang. Depth First
AUTONOMICZNY ROBOT DO MAPOWANIA KSZTAŁTÓW AUTONOMOUS ROBOT FOR MAPPING FLOOR PLANE SHAPE. Bartosz MARTYNIUK 1. Opiekun naukowy: Grzegorz BUDZYŃ 2
 Bartosz MARTYNIUK 1 Opiekun naukowy: Grzegorz BUDZYŃ 2 AUTONOMICZNY ROBOT DO MAPOWANIA KSZTAŁTÓW POWIERZCHNI PŁASKICH Streszczenie: W artykule przedstawiono projekt autonomicznego robota do mapowania kształtów
Bartosz MARTYNIUK 1 Opiekun naukowy: Grzegorz BUDZYŃ 2 AUTONOMICZNY ROBOT DO MAPOWANIA KSZTAŁTÓW POWIERZCHNI PŁASKICH Streszczenie: W artykule przedstawiono projekt autonomicznego robota do mapowania kształtów
mbot Ranger Robot edukacyjny 3-w-1
 mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
CHŁOPCZYK Robot typu Line Follower
 Politechnika Wrocławska CHŁOPCZYK Robot typu Line Follower Autor: Damian Trzeciak Mateusz Piszczek Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław, 15 marca 2011 Spis treści 1 Wstęp 2 2 Konstrukcja
Politechnika Wrocławska CHŁOPCZYK Robot typu Line Follower Autor: Damian Trzeciak Mateusz Piszczek Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław, 15 marca 2011 Spis treści 1 Wstęp 2 2 Konstrukcja
Test dysku Intel SSD DC S3500 480GB. Wpisany przez Mateusz Ponikowski Wtorek, 22 Październik 2013 16:22
 W połowie bieżącego roku na rynku pojawiły się profesjonalne nośniki Intel z serii DC S3500. Producent deklaruje, że sprzęt przeznaczony jest do bardziej wymagających zastosowań takich jak centra danych
W połowie bieżącego roku na rynku pojawiły się profesjonalne nośniki Intel z serii DC S3500. Producent deklaruje, że sprzęt przeznaczony jest do bardziej wymagających zastosowań takich jak centra danych
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android
 Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
PROJEKT I OPTYMALIZACJA STRUKTURY LOGICZNEJ DYDAKTYCZNEGO SYSTEMU MIKROPROCESOROWEGO DLA LABORATORIUM PROJEKTOWANIA ZINTEGROWANEGO
 II Konferencja Naukowa KNWS'05 "Informatyka- sztuka czy rzemios o" 15-18 czerwca 2005, Z otniki Luba skie PROJEKT I OPTYMALIZACJA STRUKTURY LOGICZNEJ DYDAKTYCZNEGO SYSTEMU MIKROPROCESOROWEGO DLA LABORATORIUM
II Konferencja Naukowa KNWS'05 "Informatyka- sztuka czy rzemios o" 15-18 czerwca 2005, Z otniki Luba skie PROJEKT I OPTYMALIZACJA STRUKTURY LOGICZNEJ DYDAKTYCZNEGO SYSTEMU MIKROPROCESOROWEGO DLA LABORATORIUM
STEROWNIKI ROBOTÓW ( PROJEKT ) ROBOT KLASY LINEFOLLOWER
 ROBOT KLASY LINEFOLLOWER") 30042012 Wrocław STEROWNIKI ROBOTÓW ( PROJEKT ) ROBOT KLASY LINEFOLLOWER Prowadzący: Mgr inż Jan Kędzierski Wykonawca: Michał Chrzanowski 180588 Sterowniki robotów (projekt) Strona 1 1 Wstęp Celem projektu
30042012 Wrocław STEROWNIKI ROBOTÓW ( PROJEKT ) ROBOT KLASY LINEFOLLOWER Prowadzący: Mgr inż Jan Kędzierski Wykonawca: Michał Chrzanowski 180588 Sterowniki robotów (projekt) Strona 1 1 Wstęp Celem projektu
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych. Autor: Tomasz Gluziński
 Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Zarządzanie pamięcią operacyjną
 SOE Systemy Operacyjne Wykład 7 Zarządzanie pamięcią operacyjną dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Hierarchia pamięci czas dostępu Rejestry Pamięć podręczna koszt
SOE Systemy Operacyjne Wykład 7 Zarządzanie pamięcią operacyjną dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Hierarchia pamięci czas dostępu Rejestry Pamięć podręczna koszt
Enkoder magnetyczny AS5040.
 Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
LSPX-21 LISTWOWY MODUŁ WEJŚĆ ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA. Wrocław, październik 2003 r.
 LISTWOWY MODUŁ WEJŚĆ ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, październik 2003 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S.JARACZA 57-57A TEL. 0-602-62-32-71 str.2 SPIS TREŚCI 1.OPIS TECHNICZNY...3
LISTWOWY MODUŁ WEJŚĆ ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, październik 2003 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S.JARACZA 57-57A TEL. 0-602-62-32-71 str.2 SPIS TREŚCI 1.OPIS TECHNICZNY...3
TDWA-21 TABLICOWY DWUPRZEWODOWY WYŚWIETLACZ SYGNAŁÓW ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA. Wrocław, listopad 1999 r.
 TABLICOWY DWUPRZEWODOWY WYŚWIETLACZ SYGNAŁÓW ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, listopad 1999 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S. Jaracza 57-57a TEL. 602-62-32-71 str.2
TABLICOWY DWUPRZEWODOWY WYŚWIETLACZ SYGNAŁÓW ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, listopad 1999 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S. Jaracza 57-57a TEL. 602-62-32-71 str.2
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT. Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014
 Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu.
 Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
Raport z budowy robota mobilnego klasy minisumo John Cena. Jędrzej Boczar Jan Bednarski Dominik Świerzko
 Raport z budowy robota mobilnego klasy minisumo John Cena Jędrzej Boczar Jan Bednarski Dominik Świerzko Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści
Raport z budowy robota mobilnego klasy minisumo John Cena Jędrzej Boczar Jan Bednarski Dominik Świerzko Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Robot do pokrycia powierzchni terenu
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
LITEcompLPC1114. Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Sponsorzy:
 Sponsorzy:") LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
Dydaktyka Informatyki budowa i zasady działania komputera
 Dydaktyka Informatyki budowa i zasady działania komputera Instytut Matematyki Uniwersytet Gdański System komputerowy System komputerowy układ współdziałania dwóch składowych: szprzętu komputerowego oraz
Dydaktyka Informatyki budowa i zasady działania komputera Instytut Matematyki Uniwersytet Gdański System komputerowy System komputerowy układ współdziałania dwóch składowych: szprzętu komputerowego oraz
SpeakUp click, czyli jak bezstresowo dogadać się z lampką?
 1 SpeakUp click, czyli jak bezstresowo dogadać się z lampką?, mgr inż. Paweł Sióda SpeakUp click, czyli jak bezstresowo dogadać się z lampką? W ostatnich latach wszyscy obserwujemy ultraszybki rozwój elektroniki
1 SpeakUp click, czyli jak bezstresowo dogadać się z lampką?, mgr inż. Paweł Sióda SpeakUp click, czyli jak bezstresowo dogadać się z lampką? W ostatnich latach wszyscy obserwujemy ultraszybki rozwój elektroniki
Zasady organizacji projektów informatycznych
 Zasady organizacji projektów informatycznych Systemy informatyczne w zarządzaniu dr hab. inż. Joanna Józefowska, prof. PP Plan Definicja projektu informatycznego Fazy realizacji projektów informatycznych
Zasady organizacji projektów informatycznych Systemy informatyczne w zarządzaniu dr hab. inż. Joanna Józefowska, prof. PP Plan Definicja projektu informatycznego Fazy realizacji projektów informatycznych
Autonomiczny robot mobilny w kategorii linefollower MORPROF
 Autonomiczny robot mobilny w kategorii linefollower MORPROF Autorzy projektu: Marek Płóciennik 145396 Marcin Wytrych 145419 Koordynator Projektu: Dr inż. Grzegorz Granosik Spis Treści: 1. Opis projektu
Autonomiczny robot mobilny w kategorii linefollower MORPROF Autorzy projektu: Marek Płóciennik 145396 Marcin Wytrych 145419 Koordynator Projektu: Dr inż. Grzegorz Granosik Spis Treści: 1. Opis projektu
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
ANALIZA ALGORYTMÓW. Analiza algorytmów polega między innymi na odpowiedzi na pytania:
 ANALIZA ALGORYTMÓW Analiza algorytmów polega między innymi na odpowiedzi na pytania: 1) Czy problem może być rozwiązany na komputerze w dostępnym czasie i pamięci? 2) Który ze znanych algorytmów należy
ANALIZA ALGORYTMÓW Analiza algorytmów polega między innymi na odpowiedzi na pytania: 1) Czy problem może być rozwiązany na komputerze w dostępnym czasie i pamięci? 2) Który ze znanych algorytmów należy
PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI
 Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
OPBOX ver USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych ze
 OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych ze OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych Charakterystyka OPBOX 2.0 wraz z dostarczanym oprogramowaniem
OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych ze OPBOX ver 2.0 - USB 2.0 Miniaturowy Ultradźwiękowy system akwizycji danych Charakterystyka OPBOX 2.0 wraz z dostarczanym oprogramowaniem
Pomiar prędkości obrotowej
 2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
Konfigurator Modbus. Instrukcja obsługi programu Konfigurator Modbus. wyprodukowano dla
 Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
Robot Mobilny Mobot-Explorer
 Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
KA-NUCLEO-UniExp. Wielofunkcyjny ekspander dla NUCLEO i Arduino z Bluetooth, MEMS 3DoF, LED-RGB i czujnikiem temperatury
 Wielofunkcyjny ekspander dla NUCLEO i Arduino z Bluetooth, MEMS 3DoF, LED-RGB i czujnikiem temperatury jest uniwersalnym ekspanderem dla komputerów NUCLEO oraz Arduino, wyposażonym w analogowy czujnik
Wielofunkcyjny ekspander dla NUCLEO i Arduino z Bluetooth, MEMS 3DoF, LED-RGB i czujnikiem temperatury jest uniwersalnym ekspanderem dla komputerów NUCLEO oraz Arduino, wyposażonym w analogowy czujnik
Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny
 Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny 16 listopada 2006 1 Wstęp Robot Khepera to dwukołowy robot mobilny zaprojektowany do celów badawczych i edukacyjnych. Szczegółowe
Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny 16 listopada 2006 1 Wstęp Robot Khepera to dwukołowy robot mobilny zaprojektowany do celów badawczych i edukacyjnych. Szczegółowe
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Robot mobilny klasy minisumo Buster
 Robot mobilny klasy minisumo Buster Michał Mamzer Łukasz Klucznik Maciej Kwiecień Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2012 1 Spis treści 1. Wstęp... 3 2. Założenia projektu... 3
Robot mobilny klasy minisumo Buster Michał Mamzer Łukasz Klucznik Maciej Kwiecień Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2012 1 Spis treści 1. Wstęp... 3 2. Założenia projektu... 3
ĆWICZENIE NR.6. Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych
 ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
Roboty grają w karty
 Roboty grają w karty Wstęp: Roboty grają w karty - to propozycja lekcji łączącej edukację matematyczną z programowaniem i elementami robotyki. Uczniowie będą tworzyć skrypty w aplikacji Blockly, jednocześnie
Roboty grają w karty Wstęp: Roboty grają w karty - to propozycja lekcji łączącej edukację matematyczną z programowaniem i elementami robotyki. Uczniowie będą tworzyć skrypty w aplikacji Blockly, jednocześnie
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP
 Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Laboratoria badawcze
 rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
Asystent termiki oraz wiatru W systemie FPV Pitlab & Zbig
 Asystent termiki oraz wiatru W systemie FPV Pitlab & Zbig Dokument odnosi się do Pitlab&Zbig OSD w wersji 2.40 lub późniejszej Asystent wiatru Funkcjonalność Asystenta Wiatru pozwala na pomiar oraz prezentację
Asystent termiki oraz wiatru W systemie FPV Pitlab & Zbig Dokument odnosi się do Pitlab&Zbig OSD w wersji 2.40 lub późniejszej Asystent wiatru Funkcjonalność Asystenta Wiatru pozwala na pomiar oraz prezentację
Sprawozdanie z realizacji projektu:
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.4.1.2--2/1 Program Operacyjny Kapitał
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.4.1.2--2/1 Program Operacyjny Kapitał
dr inż. Jarosław Forenc
 Informatyka 2 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr III, studia stacjonarne I stopnia Rok akademicki 2010/2011 Wykład nr 7 (24.01.2011) dr inż. Jarosław Forenc Rok akademicki
Informatyka 2 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr III, studia stacjonarne I stopnia Rok akademicki 2010/2011 Wykład nr 7 (24.01.2011) dr inż. Jarosław Forenc Rok akademicki
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO
 TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
ELEMENTY SYSTEMU KONTROLI DOSTĘPU
 ELEMENTY SYSTEMU KONTROLI DOSTĘPU KONTROLERY KT-1-PCB Kontroler 1 drzwi 2 porty czytników Współpracuje z programami EntraPass Special, Corporate i Global (od wer. 6.02) 100 000 kart, 20 000 zdarzeń 4 wejścia
ELEMENTY SYSTEMU KONTROLI DOSTĘPU KONTROLERY KT-1-PCB Kontroler 1 drzwi 2 porty czytników Współpracuje z programami EntraPass Special, Corporate i Global (od wer. 6.02) 100 000 kart, 20 000 zdarzeń 4 wejścia
LSPY-21 LISTWOWY MODUŁ WYJŚĆ ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA. Wrocław, październik 2003 r.
 LISTWOWY MODUŁ WYJŚĆ ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, październik 2003 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S.JARACZA 57-57A TEL. 0-602-62-32-71 str.2 SPIS TREŚCI 1.OPIS TECHNICZNY...3
LISTWOWY MODUŁ WYJŚĆ ANALOGOWYCH DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, październik 2003 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S.JARACZA 57-57A TEL. 0-602-62-32-71 str.2 SPIS TREŚCI 1.OPIS TECHNICZNY...3
Instrukcja programowania płytek edycji 2014
 Instrukcja programowania płytek edycji 2014 Spis treści 1. Opis płytki procesorowej (sumo_base_5)...1 1.1. Podstawowe elementy płytki...2 1.2. Pozostałe elementy płytki...3 2. Opis płytki sterującej napędami
Instrukcja programowania płytek edycji 2014 Spis treści 1. Opis płytki procesorowej (sumo_base_5)...1 1.1. Podstawowe elementy płytki...2 1.2. Pozostałe elementy płytki...3 2. Opis płytki sterującej napędami
Ćw. nr 31. Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2
 1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
REFERAT O PRACY DYPLOMOWEJ
 REFERAT O PRACY DYPLOMOWEJ Temat pracy: Projekt i implementacja urządzenia realizującego pozycjonowanie geograficzne. Autor: Janusz Gołkowski Czynnikami do powstanie niniejszej pracy była szeroka dostępność
REFERAT O PRACY DYPLOMOWEJ Temat pracy: Projekt i implementacja urządzenia realizującego pozycjonowanie geograficzne. Autor: Janusz Gołkowski Czynnikami do powstanie niniejszej pracy była szeroka dostępność
Algorytm indukcji klasyfikatora za pomocą EA z automatycznym przełączaniem ukierunkowań
 Algorytm indukcji klasyfikatora za pomocą EA z automatycznym przełączaniem ukierunkowań Anna Manerowska, Michal Kozakiewicz 2.12.2009 1 Wstęp Jako projekt na przedmiot MEUM (Metody Ewolucyjne Uczenia Maszyn)
Algorytm indukcji klasyfikatora za pomocą EA z automatycznym przełączaniem ukierunkowań Anna Manerowska, Michal Kozakiewicz 2.12.2009 1 Wstęp Jako projekt na przedmiot MEUM (Metody Ewolucyjne Uczenia Maszyn)
MIKROKONTROLERY ARM DOKUMENTACJA WSTĘPNA PROJEKTU GRA PONG
 MIKROKONTROLERY ARM DOKUMENTACJA WSTĘPNA PROJEKTU GRA PONG Prowadzący: dr inż. Mariusz Jarosław Suchenek Opracował: Maciej Michał Piegza Nr indeksu: 281397 1. Cel projektu Celem projektu jest stworzenie
MIKROKONTROLERY ARM DOKUMENTACJA WSTĘPNA PROJEKTU GRA PONG Prowadzący: dr inż. Mariusz Jarosław Suchenek Opracował: Maciej Michał Piegza Nr indeksu: 281397 1. Cel projektu Celem projektu jest stworzenie
Wykład 2. Mikrokontrolery z rdzeniami ARM
 Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów