Programowalne układy logiczne kod kursu: ETD Szybkość, moc, zasoby W
|
|
|
- Roman Barański
- 6 lat temu
- Przeglądów:
Transkrypt


1 Programowalne układy logiczne kod kursu: ETD Szybkość, moc, zasoby W mgr inż. Maciej Rudek


2 Dobre rady Techniki kodowania RTL: - Czy dane wejście nie jest sterowane przez więcej niż jedno źródło: - Omijanie konstrukcji powodujących powstawanie zatrzasków: - Wykorzystanie instrukcji nieblokujących powoduje aktualizację po zakończeniu bloku always, a dla blokujących od razu:
3 Dobre rady Funkcje wykorzystywane dla układów kombinacyjnych i są replikowane gdy są wykorzystywane w różnych częściach kodu Zadania chętniej wykorzystywane dla zdarzeń czasowych w szczególności dla symulacji (narzędzia syntezy powinny zdarzenia czasowe pominąć) Zatrzaski typu -Latch Zajmują mało miejsca, konsumują mało mocy, potrzebują więcej czasu na ustabilizowanie się Przerzutniki typu Flip-Flop Potrzebują więcej miejsca, mają większe zapotrzebowanie na pobór mocy,
4 Dobre rady Konstrukcja if-else powoduje wykonanie konstrukcji, która jest priorytetowa podczas dekodowania Konstrukcja Case jest prosta w odczycie, może zostać zaimplementowana jako równoległa lub z dekodowaniem priorytetowym. Dobrym zwyczajem jest wykorzystanie wszystkich możliwych kombinacji lub zastosowanie dyrektywy default na końcu konstrukcji. Pomiędzy porównaniem == oraz === operatorów, ten pierwszy jest syntezowalny a ten drugi już nie.
5 Dobre rady W automatach stanu Moore a, stan na wyjściu zależy tylko od obecnego stanu a w Mealy ego także od wejścia. Oba są tak samo często stosowane. Kodowanie Binarne, z gorącą jedynka i Grey a: Binarne wymagana jest mniejsza ilość przerzutników typu flipflop dla wielu przejść, Z gorącą jedynką (one-hot) ilość przerzutników flip-flop będzie taka sama jak ilość stanów Kodowanie Grey a popularnie wykorzystywany dla różnych dwóch różnych domen zegara.
6 Ogólne praktyki kodowania Wypisać wszystkie wyjścia istotnych bloków Unikać wielokrotnych ścieżek komunikacyjnych pomiędzy hierarchicznie ustawionymi modułami, którymi informacja będzie wracać do tego samego bloku z hierarchii Podzielić projekt ze względu na realizowane zadania, funkcjonalność i reakcje na zbocze zegara Unikać modyfikowania modułów które są zaprojektowane dla konkretnego urządzenia/technologii/ Wykorzystuj parametry i zapisuj je u góry funkcji/bloku Unikaj wewnętrznie tworzonych zegarów oraz logiki która będzie je łączyć w głównych modułach.
7 Ogólne praktyki kodowania Unikanie stanów meta-stabilnych: w takim przypadku najlepiej, dla logiki asynchronicznej zastosować obserwacje stanu wejściowego względem sygnału zegarowego (np. wewnętrznego) i przekazywanie zmian tego sygnału za pomocą dwóch przerzutników Flip-Flop. Wówczas dana która jest złapana będzie stanem stabilnym Pomiędzy dwoma układami logicznymi taktowanymi różnym sygnałem zegarowym należy zastosować dwie kolejki FIFO z kodowaniem Grey a (licznika)
8 Popularne błędy Tworzenie modułów z wejściami ale bez wyjść, Wykonywanie zatrzasków nawet dla konstrukcji if-else, Łączenie wyjść układów logiki kombinatoryjnej z ich wejściami powodując powstawanie zapętlonych sygnałów, które są kłopotliwe podczas testowania, Brak wyszczególnionych wszystkich sygnałów w liście wrażliwościowej np. dla multiplekserów.
9 Ewolucja układów CMOS


10 Prawo Moore a Prawo Moore a 1965 przewiduje wykładniczy wzrost liczby tranzystorów w układach scalonych co miesięcy
11 CMOS cięgle dominuje Obecnie najpowszechniejszą technologią produkcji układów scalonych jest technologia CMOS (Complementary Metal- Oxide-Semiconductor) zapewnia mały pobór prądu w stanie statycznym, moc rozpraszana jest proporcjonalna do częstotliwości i kwadratu napięcia zasilania, szybkość działania wzrasta ze wzrostem napięcia zasilania i spadkiem temperatury, tranzystory MOS mają izolowaną bramkę stanowią obciążenie pojemnościowe, 11
12 Pobór prądu w układach


13 Gęstość prądu i jego skutki In collaboration with Electromigration in Cu metalisation Interconnection density 500 mln/cm2 Current density ~ 10 7 A/cm 2 13 Ehrenfried Zschech, Talk at the WRUT, Nanoscale Functional Materials, Jan. 2012
14 Pobór mocy w układach program. Oceniając pobór mocy przez układ programowalne należy uwzględnić pięć różnych czynników: Moc rozruchu ilość mocy pobieranej przez urządzenia podczas włączania zasilania, 2. Konfiguracja moc zużywana podczas ładowania danych do FPGA (dotyczy urządzeń, w których bitstream ładowany jest do SRAM z FLASH), 3. Moc statyczna moc zużywana gdy układ jest zasilany ale nie aktywny, 4. Moc dynamiczna ilość mocy zużywana podczas pracy układu, 5. Moc w trybie uśpienia moc w trybie uśpienia lub trybie niskiego poboru mocy.
15 15 Połączenia reprogramowalne i ich wpływ na pobór mocy
16 Wzrost wydajności FPGA pierwszej generacji: niskie częstotliwości, małe zapotrzebowanie na moc, obudowa nie ma znaczenia. Dzisiejsze układy FPGA: wysokie częstotliwości, znaczne zapotrzebowanie na moc, ograniczenie możliwością odpr. ciepła przez obudowę, P MAX wymagane aktywne monitory temperatury. Moc odprowadzana przez obudowę Niska skala integ. Wysoka skala integracji Realne zapotrzebowanie Częstotliwość (MHz) 16 Wytrzymałość termiczna obudowy: 125 C - standardowy rodzaj (plastik), 150 C - przemysłowy, militarny (ceramika).
17 Inwerter CMOS I CC = I U + I D f + I C f 17 I U składowa prądu upływu, (rząd wartości: setki na), I D (f) składowa pobierana przy przełączaniu, (rząd wartości: setki µa) I C (f) składowa ładowania obciążenie pojemnościowego (rząd wartości: setki µa)
18 18 Inwerter CMOS
19 Energia w układach CMOS t 1 t 1 t 1 E SW = P t dt = U DD u i t dt = U DD u C du t 0 dt t 0 t 0 dt = t 1 t 1 = CU DD du C udu = C t 0 t 0 2 U DD 1 2 CU DD 2 = 1 2 CU DD 2 19 energia pobrana z zasilania energia zmagazynowana energia rozpraszana
![Moc pobierana przez układ [mw] Pobór mocy - układy z pamięcią ulotną i nieulotną Moc rozruchowa,](/docs-images/96/128438822/images/20-2.jpg "SRAM stabilizacja napięcia zas.")
20 Moc pobierana przez układ [mw] Pobór mocy - układy z pamięcią ulotną i nieulotną Moc rozruchowa, SRAM stabilizacja napięcia zas. Moc zależna od częstotliwości Konfiguracja komórek SRAM 20 Czas [ms]
![Moc pobierana przez układ [mw] Pobór](/docs-images/96/128438822/images/21-1.jpg "mocy - układy z pamięcią ulotną i")

21 Moc pobierana przez układ [mw] Pobór mocy - układy z pamięcią ulotną i nieulotną rozruch statyczna + dynamiczna statyczna wyłączenie 21 Czas [ms]
22 Moc pobierana przez układ [mw] Moc dynamiczna a częstotliwość pracy Częstotliwość taktowania [MHz] 22 Test mocy dynamicznej pobieranej przez układy różnych producentów. Obciążenie: 290, 8-bitowych liczników w kodzie Graya
23 Zarządzanie mocą w układach Xilinx 23 Xilinx Power Estimator faza koncepcyjna arkusza kalkulacyjny opracowany przez inżynierów Xilinx na potrzeby szacowania zużycia mocy w zależności od wykorzystanych zasobów XPower Analyzer faza projektowa analiza poboru mocy po implementacji i trasowaniu połączeń w zasobach sprzętowych, wykorzystywana jest wiedza nt. zasobów sprzętowych układu, narzędzie do szacowania Plan Ahead - optymalizacja dystrybucja zasilania na poziomie RTL, projektant określa warunki pracy urządzenia, właściwości I/O Programowa optymalizacja użytych zasobów ograniczanie zasobów, ilości pinów I/O, zmniejszenie ilości użytych BlockRAM, minimalizowanie aktywnych portów BlockRAM, grupowanie sygnałów zegarowych, reorganizacja układów synchronicznych (flip-flops), ogranicznie pionowych oraz poziomych traktów połączeniowych umożliwia odłączenie części układu, grupowanie powiązanej ze sobą logiki kombinacyjnej, sekwencyjnej
24 24 Poziomy optymalizacji
25 Zarządzanie mocą - dokumentacja, materiały, dodatki Command Line Tools User Guide: XPower chapter Help Software Manuals Command Line Tools User Guide Online help from the XPower GUI Xilinx Power Solutions Web Page - Technology Solutions Power Solutions - Get the XPower Estimator spreadsheets for all Xilinx devices - 7 Steps to Worst Case Power Estimation, WP353 - Spartan-6 Power Management User Guide, UG394 - Power Consumption at 40 and 45 nm, 298 Application Notes: Help Xilinx on the Web Xilinx Application Notes - Application Note XAPP158: Powering Xilinx FPGAs Xilinx Education Services courses - Xilinx tools and architecture courses - Hardware description language courses - Basic FPGA architecture and other topics (free Videos!) 25
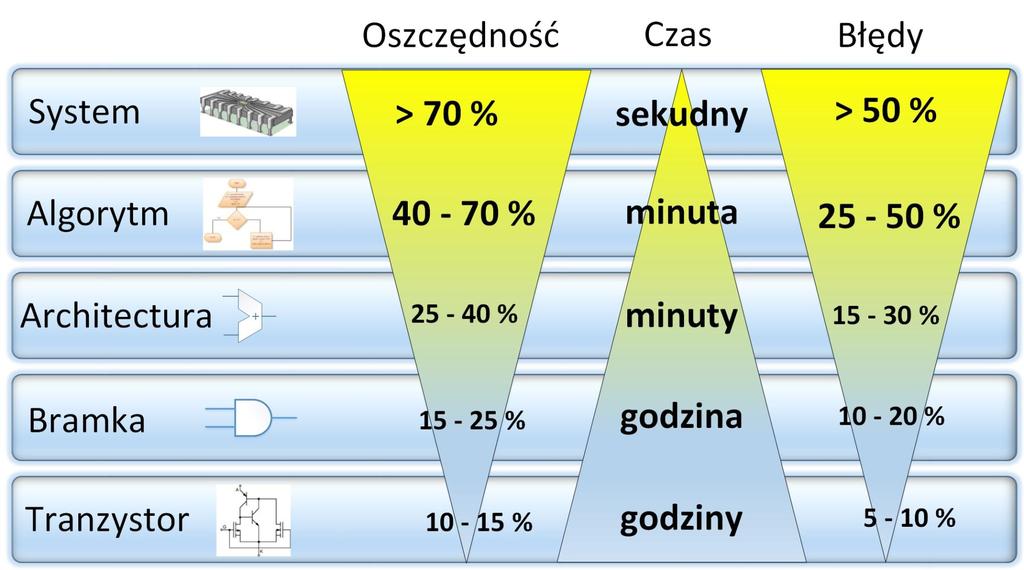
26 Optymalizacja poboru mocy 26 Bramkowanie zasilania (ang. power gating), Całkowite wyłączenie napięcia zasilania w czasowo niewykorzystywanym bloku lub zmniejszenie jego wartości, to jedne z najskuteczniejszych metod ograniczenia zarówno mocy dynamicznej, jaki i statycznej. Takie rozwiązanie jest jednak najbardziej naturalne w układach ASIC, natomiast bardzo trudne do realizacji w układzie programowalnym FPGA Skalowanie napięcia (ang. voltage scaling) polega na dostosowywaniu poziomu napięcia do aktualnego stanu układu Bramkowanie oraz skalowanie sygnału zegarowego (ang. clock gating, dynamic frequency scaling) efektywną metodą redukcji mocy jest technika polegająca na wyłączaniu sygnału zegarowego lub zmniejszaniu jego częstotliwości w modułach, które nie są w danym momencie wykorzystywane. Techniki takie jak bramkowanie zegara oraz skalowanie częstotliwości, są stosunkowo łatwe do realizacji w układach reprogramowalnych. Można je realizować, stosując odpowiedni opis układu na poziomie RTL (ang. Register Transfer Level).
27 Clock Gating Bramkowanie całej domeny zegarowej możliwe jest po przez użycie komponentu BUFGCE 27

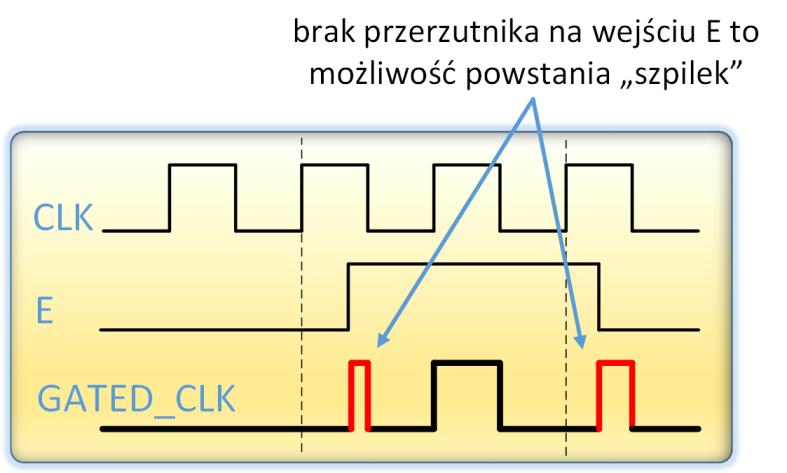
28 Bramkowanie CLK sygnał GATED_CLK aktywny tylko wtedy, gdy E synchronizowany jest z zegarem CLK 28 bramkowanie zegara, niebezpieczeństwo powstania szpilek
29 Szybkość w układach a zasoby

30 Propagacja sygnałów Matrycowe rozmieszczenie komórek logicznych CLB wymusza zastosowanie segmentowych połączeń między nimi, niesie to za sobą trudne do przewidzenia i zależne od algorytmów syntezy logicznej parametry czasowe realizowanego projektu. 3 Trasa propagacji sygnału: t PD = t 1 + t 2 + t 3 + t 4 + t 5 + t 6 +
31 Kilka pojęć związanych z czasem Czas propagacji (ang. propagation delay) Czas reakcji, zadziałania (ang. contamination delay) Czas ustalania (ang. setup time) Czas trzymania (ang. hold time) Jitter 3

32 Czas propagacji - propagation delay t PD czas potrzebny na zmianę i ustabilizowanie się wartości sygnału wyjściowego pod wpływem zmian sygnału wejściowego 3

33 Czas reakcji - contamination delay t CD wartość ta wskazuje ilość czasu potrzebnego do zmiany stanu wyjścia cyfrowego zainicjowana zmianę sygnały na wejściu układu 3


34 Czas ustalania oraz trzymania - setup time t ST, hold time t HT czas stabilizacji danych wejściowych przed pojawieniem się zbocza CLK czas trzymania danych po wystąpieniu zbocza sygnału CLK t DQ 3


35 Opóźnienie sygnałów - clock skew długie połączenia, bufory na liniach zegarowych, logika komb. na liniach zegarowych 35


36 Jitter Jitter jest to chwilowe odstępstwo zboczy sygnałów od ich idealnych wartości. Powodem niestabilności sygnału są zazwyczaj: fluktuacje napięć zasilania, zmiany temperatury, obciążenie, zakłócenia zewnętrzne (emitowane przez inne urządzenia), szum drgań termicznych układów elektronicznych itp. Jitter może dotyczyć częstotliwości, amplitudy i fazy danego sygnału. wzorcowy T CLK0 jitter z jitter em okresowo T CLK (n) T CLK (n) T CLK (n+1) 3 J ACC = T CLK (n) nt CLK0


37 CRYSTAL OSCILLATOR EPSON Q3851CA XG-1000CA 50 MHZ OSCILLATOR, SPXO, XG- 1000CA, 50 MHZ, SMD 37

38 Widmo sygnału z jitter-em Większa wartości jitter-a powoduje poszerzenie prążka widmowego 38


39 Metody eliminacji jitter-a - jitter cleaning clock Si5317 Silicon Labs

40 Metody eliminacji jitteru 40

41 Metody eliminacji jitter-u 41
 + t PD (LK) + t ST (B) T MIN = 10 ns + 5 ns + 2 ns = 17 ns f = 1/T MIN = 1/17")
42 Przykład minimalny okres sygnału Po jakim czasie na wyjściu zaobserwujemy zmianę stanu? 42 T MIN = t DQ (A) + t PD (LK) + t ST (B) T MIN = 10 ns + 5 ns + 2 ns = 17 ns f = 1/T MIN = 1/17 ns = 58,8 MHz
 po czasie 5 ns sygnał pojawia się na wyjściu log. kombinacyjnej 3) w nast. cyklu zeg.")
43 Przykład minimalny okres sygnału t HT (B) t CD (A) + t CT (LK) 43 1) po narastającym zboczu CLK i czasie 10 ns sygnał z wej. D trafi na wejście x, 2) po czasie 5 ns sygnał pojawia się na wyjściu log. kombinacyjnej 3) w nast. cyklu zeg. sygnał zostaje przepisany na wyj. out
 = 9 ns + 5 ns + 2 ns = 16 ns 44 T BC = t DQ (B) + t PD (LK) + t ST (C) = 10 ns + 5 ns + 2 ns = 17")
44 Przykład f MAX = 58,8 MHz T AB = t DQ (A) + t ST (B) = 9 ns + 2 ns = 11 ns T AC = t DQ (A) + t PD (LK) + t ST (C) = 9 ns + 5 ns + 2 ns = 16 ns 44 T BC = t DQ (B) + t PD (LK) + t ST (C) = 10 ns + 5 ns + 2 ns = 17 ns


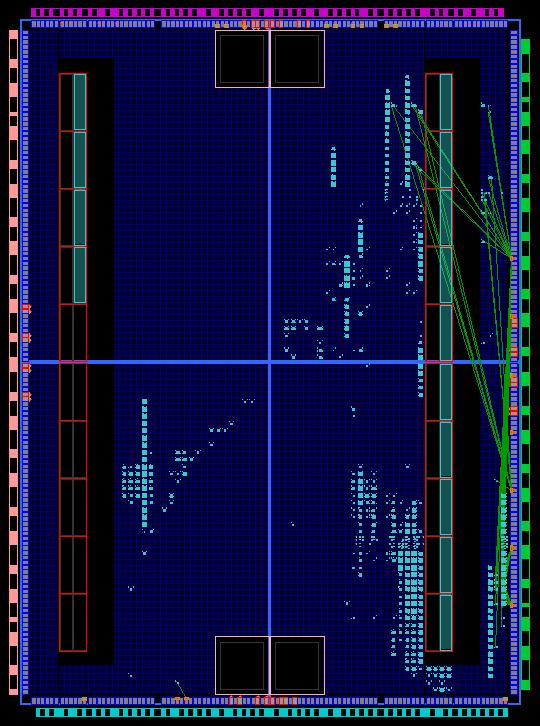
45 Ograniczenia czasowe efekty - Timing Constraints Bez globalnych ograniczeń czasowych Z globalnymi ograniczeniami czasowymi 45 Grupowanie optymalizowane pod kątem poprawy czasu wewnątrz struktury logicznej Ocenie czasowej podlegają wszystkie połączenia, CLB zostają rozmieszczone bliżej IOB

46 46 Plan Ahead - floorplaner
47 Ograniczenia czasowe 47 W procesie projektowania i syntezy CPLD/FPGA istnieją cztery rodzaje ograniczeń: ograniczenie między połączeniowe, - obejmuje połączenia pomiędzy elementami synchronicznymi, taktowanych globalnym sygnałem zegarowym, ograniczenie przesunięć czasowych od wej. i z wyj., - obejmuje połączenie pomiędzy elementami synchronicznymi z sygnałami z wejścia, oraz synchronicznych elementów wyjściowych, ograniczenia czasowe od PAD-u do PAD-u, - obejmuje połączenia od pad-u do pad-u, ścieżki nie mogą zawierać elementów synchronicznych, ograniczenie od do - obejmuje ograniczania pomiędzy dwoma określonymi grupami sygnałów, grupa może być zdefiniowana lub predefiniowana
48 Ograniczenia czasowe czas do wejścia czas pomiędzy czas do wyjścia ADATA FLOP1 D Q FLOP2 D Q FLOP3 D Q OUT1 CLK BUS [7..0] BUFG FLOP4 D Q FLOP5 D Q OUT2 CDATA od wejścia do wyjścia (PAD to PAD) 48
49 Punkty końcowe Elementami końcowymi są: - wejścia/wyjścia (I/O pads) - elementy synchroniczne: FFs, Latches, Rams, DSP slices, SRLs, Flip-Flops Zatrzaski RAM DSP48 49 W ich skład nie zalicza się: - LUT, - połączeń, ścieżek oraz elementów asynchronicznych

50 Optymalizacja czas, rozmiar - Post-Place & Route Static Timing Report Analiza, czy spełnione zostały założone ograniczenia? Design Summary/Reports Place & Route report Założenia odnośnie syg. zegarowego Actual Period 2,025 ns All constraints were met. 52

51 53 Optymalizacja czas, rozmiar - Failing Constraints



52 Optymalizacja czas, rozmiar - optymalizacja procesu syntezy XST odpowiednie wykorzystanie możliwości modułu XST pozwala zwiększać wydajność Synthesis Options HDL Options Xilinx Specific Options 54

53 Optymalizacja czas, rozmiar - optymalizacja procesu syntezy XST Łączenie LUT - LUT Combining korzystanie z zasobów LUT (generatorów funkcji) powiązanie, XST looks for functions that use the same five inputs and tries to pair them Recommended for Virtex-5, Spartan-6, and Virtex-6 architectures Ograniczenie zasobów sterujących - Reduce Control Sets XST będzie korzystał z LUT zamiast przerzutników z CE, synch. SET/RESET, wszystkie FF w obrębie Slice a korzystają z tych samych CE, SET, RESET 55

54 Optymalizacja czas, rozmiar - optymalizacja procesu syntezy XST Symbol blokady Oznacza tylko tyle, że ustawienia regulowane są przez cel projektu i ustawień strategii, Zmiana wymaga wybór innej strategii Możliwość zmiany właściwości bardziej zaawansowanych 56
55 Optymalizacja czas, rozmiar - zalecana strategia (1) Korzystaj ze standardowych opcji i planów syntezy, (2) Zezwól na korzystanie z ograniczeń XCF, (3) Zezwól na umieszczanie rejestrów w blokach IOB, zwiększa to szybkość działania wyjść, (4) Redukuj zasoby zoptymalizuj kod, korzystaj z dedykowanych zasobów, (5) Korzystaj z celów i strategii 57


56 Optymalizacja czas, rozmiar - ISE WebPack Design Goals & Strategies Zaawansowane opcje syntezy i implementacji Opcje definiowalne Zrównoważony poziom optymalizacji Optymalizacja czasowa Redukcja obszaru Ograniczenie czasu działania Optymalizacja zużycia mocy Możliwość edytowania strategii 58

57 Optymalizacja czas, rozmiar - technika programowania Proste kroki kodowania zwiększające wydajność kodu: przetwarzanie równoległe, procesy, procesy, procesy operacje współbieżne, optymalizacja maszyn stanów, grupować operacje arytmetyczne, wykorzystanie zasobów wewnętrznych: mnożarki, rejestry przesuwne, LUT RAM, BlkockRAM, DSP, unikać konstrukcji o wysokim poziomie zagnieżdżenia: ograniczać pętle w kodzie. 61 Tworzenie projektów synchronicznych pozwala tworzyć projekty stabilne w pełnym zakresie częstotliwości sygnałów wejściowych.

58 W ramach podsumowania kompresja 62


59 Procesor DSP logika FPGA Procesor DSP Zrównoleglone przetwarzanie w FPGA 63 Stała nieelastyczna architektura - typowo 1-8 jednostki MAC - stała szerokość danych Przetwarzanie sekwencyjne ogranicza przepustowość - współdzielone w czasie jednostki MAC, - duże częstotliwości taktowania stawiają duże wyzwania projektantom systemów. Możliwość realizacji setek przekształceń MAC w obrębie jednego układu FPGA Przetwarzanie równoległe umożliwia dużą przepustowość
60 Miary wydajności MIPS - Million Instructions Per Second (Liczba milionów operacji wykonywanych w ciągu sekundy), MMAC - Million Multiply Accumulate Operations Per Second (Liczba milionów operacji typu "pomnóż i dodaj"), MSPS - Mega-Samples Per Second (Liczba milionów próbek na sekundę), 64 Dla układów FPGA nie podaje się wydajności w MIPS. Jej zdefiniowanie dla FPGA jako całości jest niemożliwe, gdyż zależy ściśle od danego projektu. Wydajność MMAC może zostać zwiększona dzięki wykorzystaniu zasobów logicznych oraz rejestrów układu FPGA.

61 Dziękuję za uwagę :)
mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 Analiza czasowa W8 17.04.2019 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Zależności czasowe w układach programowalnych Pojęcia
Programowanie Układów Logicznych kod kursu: ETD6203 Analiza czasowa W8 17.04.2019 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Zależności czasowe w układach programowalnych Pojęcia
mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 VGA, Pobór mocy w układach programowalnych W7 11.04.2018 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Obsługa interfejsu graficznego
Programowanie Układów Logicznych kod kursu: ETD6203 VGA, Pobór mocy w układach programowalnych W7 11.04.2018 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Obsługa interfejsu graficznego
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Laboratorium przedmiotu Technika Cyfrowa
 Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Programowanie Układów Logicznych kod kursu: ETD6203 W dr inż. Daniel Kopiec. Pamięć w układach programowalnych
 Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 6.4.26 dr inż. Daniel Kopiec Plan wykładu Pamięć w układach programowalnych Zasada działania, podział pamięci Miara
Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 6.4.26 dr inż. Daniel Kopiec Plan wykładu Pamięć w układach programowalnych Zasada działania, podział pamięci Miara
Programowalne układy logiczne
 Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające
 PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
Plan wykładu. Architektura systemów komputerowych. Cezary Bolek
 Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Podstawy elektroniki cz. 2 Wykład 2
 Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
Podstawowe elementy układów cyfrowych układy sekwencyjne. Rafał Walkowiak
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Ochrona własności intelektualnej projektów w układach FPGA poprzez szyfrowanie danych konfiguracyjnych
 Ochrona własności intelektualnej projektów w układach FPGA poprzez szyfrowanie danych konfiguracyjnych (Na przykładzie projektowania układów sterujacych) Grzegorz Łabiak i Marek Węgrzyn Instytut Informatyki
Ochrona własności intelektualnej projektów w układach FPGA poprzez szyfrowanie danych konfiguracyjnych (Na przykładzie projektowania układów sterujacych) Grzegorz Łabiak i Marek Węgrzyn Instytut Informatyki
Systemy Czasu Rzeczywistego FPGA
 01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 03 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 03 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
ZASTOSOWANIA UKŁADÓW FPGA W ALGORYTMACH WYLICZENIOWYCH APPLICATIONS OF FPGAS IN ENUMERATION ALGORITHMS
 inż. Michał HALEŃSKI Wojskowy Instytut Techniczny Uzbrojenia ZASTOSOWANIA UKŁADÓW FPGA W ALGORYTMACH WYLICZENIOWYCH Streszczenie: W artykule przedstawiono budowę oraz zasadę działania układów FPGA oraz
inż. Michał HALEŃSKI Wojskowy Instytut Techniczny Uzbrojenia ZASTOSOWANIA UKŁADÓW FPGA W ALGORYTMACH WYLICZENIOWYCH Streszczenie: W artykule przedstawiono budowę oraz zasadę działania układów FPGA oraz
Literatura. adów w cyfrowych. Projektowanie układ. Technika cyfrowa. Technika cyfrowa. Bramki logiczne i przerzutniki.
 Literatura 1. D. Gajski, Principles of Digital Design, Prentice- Hall, 1997 2. C. Zieliński, Podstawy projektowania układów cyfrowych, PWN, Warszawa 2003 3. G. de Micheli, Synteza i optymalizacja układów
Literatura 1. D. Gajski, Principles of Digital Design, Prentice- Hall, 1997 2. C. Zieliński, Podstawy projektowania układów cyfrowych, PWN, Warszawa 2003 3. G. de Micheli, Synteza i optymalizacja układów
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014
 Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Wykorzystanie układów FPGA w implementacji systemów bezpieczeństwa sieciowego typu Firewall
 Grzegorz Sułkowski, Maciej Twardy, Kazimierz Wiatr Wykorzystanie układów FPGA w implementacji systemów bezpieczeństwa sieciowego typu Firewall Plan prezentacji 1. Architektura Firewall a załoŝenia 2. Punktu
Grzegorz Sułkowski, Maciej Twardy, Kazimierz Wiatr Wykorzystanie układów FPGA w implementacji systemów bezpieczeństwa sieciowego typu Firewall Plan prezentacji 1. Architektura Firewall a załoŝenia 2. Punktu
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
Układy reprogramowalne i SoC Implementacja w układach FPGA
 Układy reprogramowalne i SoC Implementacja w układach FPGA Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
Układy reprogramowalne i SoC Implementacja w układach FPGA Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez
Programowalne układy logiczne
 Programowalne układy logiczne Sygnały zegarowe Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 8 kwietnia 2013 Problem synchronizacji Projektujemy układy synchroniczne
Programowalne układy logiczne Sygnały zegarowe Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 8 kwietnia 2013 Problem synchronizacji Projektujemy układy synchroniczne
Ćw. 7: Układy sekwencyjne
 Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Język VHDL w implementacji układów cyfrowych w FPGA/CPLD poziom podstawowy GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com Szczecin 2014
Szkolenia specjalistyczne AGENDA Język VHDL w implementacji układów cyfrowych w FPGA/CPLD poziom podstawowy GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com Szczecin 2014
Projektowanie Scalonych Systemów Wbudowanych VERILOG
 Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Podstawy układów mikroelektronicznych
 Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres
 PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
Sławomir Kulesza. Projektowanie automatów synchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
Sławomir Kulesza. Projektowanie automatów asynchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Metody optymalizacji soft-procesorów NIOS
 POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki. ĆWICZENIE Nr 4 (3h) Przerzutniki, zatrzaski i rejestry w VHDL
 Przerzutniki, zatrzaski i rejestry w VHDL") Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 4 (3h) Przerzutniki, zatrzaski i rejestry w VHDL Instrukcja pomocnicza do laboratorium z przedmiotu Synteza układów
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 4 (3h) Przerzutniki, zatrzaski i rejestry w VHDL Instrukcja pomocnicza do laboratorium z przedmiotu Synteza układów
Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu
 jest to podstawowy element pamiętający każdego układu") Temat: Sprawdzenie poprawności działania przerzutników. Wstęp: Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu cyfrowego, przeznaczonego do przechowywania i ewentualnego
Temat: Sprawdzenie poprawności działania przerzutników. Wstęp: Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu cyfrowego, przeznaczonego do przechowywania i ewentualnego
Programowalne Układy Logiczne. Wykład I dr inż. Paweł Russek
 Programowalne Układy Logiczne Wykład I dr inż. Paweł Russek Literatura www.actel.com www.altera.com www.xilinx.com www.latticesemi.com Field Programmable Gate Arrays J.V. Oldfield, R.C. Dorf Field Programable
Programowalne Układy Logiczne Wykład I dr inż. Paweł Russek Literatura www.actel.com www.altera.com www.xilinx.com www.latticesemi.com Field Programmable Gate Arrays J.V. Oldfield, R.C. Dorf Field Programable
LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW
 POLITECHNIKA POZNAŃSKA FILIA W PILE LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW numer ćwiczenia: data wykonania ćwiczenia: data oddania sprawozdania: OCENA: 6 21.11.2002 28.11.2002 tytuł ćwiczenia: wykonawcy:
POLITECHNIKA POZNAŃSKA FILIA W PILE LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW numer ćwiczenia: data wykonania ćwiczenia: data oddania sprawozdania: OCENA: 6 21.11.2002 28.11.2002 tytuł ćwiczenia: wykonawcy:
Elementy cyfrowe i układy logiczne
 Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Systemy Czasu Rzeczywistego FPGA
 01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 05 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
01. Systemy Czasu Rzeczywistego FPGA 1 Systemy Czasu Rzeczywistego FPGA laboratorium: 05 autor: mgr inż. Mateusz Baran 01. Systemy Czasu Rzeczywistego FPGA 2 1 Spis treści FPGA... 1 1 Spis treści... 2
Temat: Pamięci. Programowalne struktury logiczne.
 Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Spis treúci. Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1. Przedmowa... 9. Wstęp... 11
 Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1 Spis treúci Przedmowa... 9 Wstęp... 11 1. Komputer PC od zewnątrz... 13 1.1. Elementy zestawu komputerowego... 13 1.2.
Księgarnia PWN: Krzysztof Wojtuszkiewicz - Urządzenia techniki komputerowej. Cz. 1 Spis treúci Przedmowa... 9 Wstęp... 11 1. Komputer PC od zewnątrz... 13 1.1. Elementy zestawu komputerowego... 13 1.2.
Podstawy Elektroniki dla Elektrotechniki. Liczniki synchroniczne na przerzutnikach typu D
 AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Projektowanie automatów z użyciem VHDL
 Projektowanie automatów z użyciem VHDL struktura automatu i jego modelu w VHDL przerzutnik T jako automat przykłady automatów z wyjściami typu: Moore'a Mealy stanu kodowanie stanów automatu Wykorzystano
Projektowanie automatów z użyciem VHDL struktura automatu i jego modelu w VHDL przerzutnik T jako automat przykłady automatów z wyjściami typu: Moore'a Mealy stanu kodowanie stanów automatu Wykorzystano
PROGRAMMABLE DEVICES UKŁADY PROGRAMOWALNE
 Paweł Bogumił BRYŁA IV rok Koło Naukowe Techniki Cyfrowej Dr inŝ. Wojciech Mysiński opiekun naukowy PROGRAMMABLE DEVICES UKŁADY PROGRAMOWALNE Keywords: PAL, PLA, PLD, CPLD, FPGA, programmable device, electronic
Paweł Bogumił BRYŁA IV rok Koło Naukowe Techniki Cyfrowej Dr inŝ. Wojciech Mysiński opiekun naukowy PROGRAMMABLE DEVICES UKŁADY PROGRAMOWALNE Keywords: PAL, PLA, PLD, CPLD, FPGA, programmable device, electronic
Wstęp do Techniki Cyfrowej... Układy kombinacyjne
 Wstęp do Techniki Cyfrowej... Układy kombinacyjne Przypomnienie Stan wejść układu kombinacyjnego jednoznacznie określa stan wyjść. Poszczególne wyjścia określane są przez funkcje boolowskie zmiennych wejściowych.
Wstęp do Techniki Cyfrowej... Układy kombinacyjne Przypomnienie Stan wejść układu kombinacyjnego jednoznacznie określa stan wyjść. Poszczególne wyjścia określane są przez funkcje boolowskie zmiennych wejściowych.
Przerzutnik ma pewną liczbę wejść i z reguły dwa wyjścia.
 Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp:
 Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
napięcie-częstotliwość
 Przetwornik napięcie-częstotliwość Czytnik TLD Fizyka Medyczna, studia II stopnia, Dozymetria i elektronika w medycynie 1 Czytnik TLD RA 94 2 Czytnik TLD RA 94 FOT PIF ZWN PLT PTW Fotopowielacz Przetwornik
Przetwornik napięcie-częstotliwość Czytnik TLD Fizyka Medyczna, studia II stopnia, Dozymetria i elektronika w medycynie 1 Czytnik TLD RA 94 2 Czytnik TLD RA 94 FOT PIF ZWN PLT PTW Fotopowielacz Przetwornik
mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 4.4.28 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Powtórka wiadomości Pamięć w układach
Programowanie Układów Logicznych kod kursu: ETD623 Pamięć w układach programowalnych W6 4.4.28 mgr inż. Maciej Rudek opracował: dr inż. Daniel Kopiec Plan wykładu Powtórka wiadomości Pamięć w układach
Spis treści 1. Wstęp 2. Ćwiczenia laboratoryjne LPM
 Spis treści 1. Wstęp... 9 2. Ćwiczenia laboratoryjne... 12 2.1. Środowisko projektowania Quartus II dla układów FPGA Altera... 12 2.1.1. Cel ćwiczenia... 12 2.1.2. Wprowadzenie... 12 2.1.3. Przebieg ćwiczenia...
Spis treści 1. Wstęp... 9 2. Ćwiczenia laboratoryjne... 12 2.1. Środowisko projektowania Quartus II dla układów FPGA Altera... 12 2.1.1. Cel ćwiczenia... 12 2.1.2. Wprowadzenie... 12 2.1.3. Przebieg ćwiczenia...
Ćw. 9 Przerzutniki. 1. Cel ćwiczenia. 2. Wymagane informacje. 3. Wprowadzenie teoretyczne PODSTAWY ELEKTRONIKI MSIB
 Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Laboratorium Asemblerów, WZEW, AGH WFiIS Tester NMOS ów
 Pomiar charakterystyk prądowonapięciowych tranzystora NMOS Napisz program w asemblerze kontrolera picoblaze wykorzystujący możliwości płyty testowej ze Spartanem 3AN do zbudowania prostego układu pomiarowego
Pomiar charakterystyk prądowonapięciowych tranzystora NMOS Napisz program w asemblerze kontrolera picoblaze wykorzystujący możliwości płyty testowej ze Spartanem 3AN do zbudowania prostego układu pomiarowego
Altera Quartus II. Opis niektórych komponentów dostarczanych razem ze środowiskiem. Opracował: mgr inż. Leszek Ciopiński
 Altera Quartus II Opis niektórych komponentów dostarczanych razem ze środowiskiem Opracował: mgr inż. Leszek Ciopiński Spis treści Opis wybranych zagadnień obsługi środowiska Altera Quartus II:...1 Magistrale:...
Altera Quartus II Opis niektórych komponentów dostarczanych razem ze środowiskiem Opracował: mgr inż. Leszek Ciopiński Spis treści Opis wybranych zagadnień obsługi środowiska Altera Quartus II:...1 Magistrale:...
Układy cyfrowe w Verilog HDL. Elementy języka z przykładami. wersja: cz.3
 Układy cyfrowe w Verilog Elementy języka z przykładami wersja: 10.2009 cz.3 1 Układy sekwencyjne Układy sekwencyjne mają pamięć Układy synchroniczne najczęściej spotykane wszystkie elementy są kontrolowane
Układy cyfrowe w Verilog Elementy języka z przykładami wersja: 10.2009 cz.3 1 Układy sekwencyjne Układy sekwencyjne mają pamięć Układy synchroniczne najczęściej spotykane wszystkie elementy są kontrolowane
Logiczne układy bistabilne przerzutniki.
 Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Cyfrowe Elementy Automatyki. Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem
 Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Programowalne układy logiczne
 Programowalne układy logiczne Przerzutniki Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 20 maja 2013 Przerzutnik synchroniczny Układ synchroniczny wyzwalany ustalonym
Programowalne układy logiczne Przerzutniki Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 20 maja 2013 Przerzutnik synchroniczny Układ synchroniczny wyzwalany ustalonym
Modelowanie liczników w języku Verilog i ich implementacja w strukturze FPGA
 Modelowanie liczników w języku Verilog i ich implementacja w strukturze FPGA Licznik binarny Licznik binarny jest najprostszym i najpojemniejszym licznikiem. Kod 4 bitowego synchronicznego licznika binarnego
Modelowanie liczników w języku Verilog i ich implementacja w strukturze FPGA Licznik binarny Licznik binarny jest najprostszym i najpojemniejszym licznikiem. Kod 4 bitowego synchronicznego licznika binarnego
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Język opisu sprzętu VHDL
 Język opisu sprzętu VHDL dr inż. Adam Klimowicz Seminarium dydaktyczne Katedra Mediów Cyfrowych i Grafiki Komputerowej Informacje ogólne Język opisu sprzętu VHDL Przedmiot obieralny dla studentów studiów
Język opisu sprzętu VHDL dr inż. Adam Klimowicz Seminarium dydaktyczne Katedra Mediów Cyfrowych i Grafiki Komputerowej Informacje ogólne Język opisu sprzętu VHDL Przedmiot obieralny dla studentów studiów
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
LABORATORIUM TECHNIKA CYFROWA LICZNIKI I REJESTRY. Rev.1.1
 LABORATORIUM TECHNIKA CYFROWA LICZNIKI I REJESTRY Rev.1.1 1. Cel ćwiczenia Praktyczna weryfikacja wiedzy teoretycznej z zakresu projektowania układów kombinacyjnych oraz arytmetycznych 2. Projekty Przy
LABORATORIUM TECHNIKA CYFROWA LICZNIKI I REJESTRY Rev.1.1 1. Cel ćwiczenia Praktyczna weryfikacja wiedzy teoretycznej z zakresu projektowania układów kombinacyjnych oraz arytmetycznych 2. Projekty Przy
Specyfika projektowania Mariusz Rawski
 CAD Specyfika projektowania Mariusz Rawski rawski@tele.pw.edu.pl http://rawski.zpt.tele.pw.edu.pl/ System cyfrowy pierwsze skojarzenie Urządzenia wprowadzania danych: klawiatury czytniki urządzenia przetwarzania
CAD Specyfika projektowania Mariusz Rawski rawski@tele.pw.edu.pl http://rawski.zpt.tele.pw.edu.pl/ System cyfrowy pierwsze skojarzenie Urządzenia wprowadzania danych: klawiatury czytniki urządzenia przetwarzania
Język HDL - VERILOG. (Syntetyzowalna warstwa języka) Hardware Description Language Krzysztof Jasiński PRUS PRUS
 Hardware Description Language Krzysztof Jasiński PRUS PRUS") Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
Generator przebiegów pomiarowych Ex-GPP2
 Generator przebiegów pomiarowych Ex-GPP2 Przeznaczenie Generator przebiegów pomiarowych GPP2 jest programowalnym sześciokanałowym generatorem napięć i prądów, przeznaczonym do celów pomiarowych i diagnostycznych.
Generator przebiegów pomiarowych Ex-GPP2 Przeznaczenie Generator przebiegów pomiarowych GPP2 jest programowalnym sześciokanałowym generatorem napięć i prądów, przeznaczonym do celów pomiarowych i diagnostycznych.
Katedra Przyrządów Półprzewodnikowych i Optoelektronicznych Laboratorium Przyrządów Półprzewodnikowych. Ćwiczenie 4
 Ćwiczenie 4 Cel ćwiczenia Celem ćwiczenia jest poznanie charakterystyk statycznych układów scalonych CMOS oraz ich własności dynamicznych podczas procesu przełączania. Wiadomości podstawowe. Budowa i działanie
Ćwiczenie 4 Cel ćwiczenia Celem ćwiczenia jest poznanie charakterystyk statycznych układów scalonych CMOS oraz ich własności dynamicznych podczas procesu przełączania. Wiadomości podstawowe. Budowa i działanie
Układy FPGA. Programowalne Układy Cyfrowe dr inż. Paweł Russek
 Układy FPGA Programowalne Układy Cyfrowe dr inż. Paweł Russek Program wykładu Geneza Technologia Struktura Funktory logiczne, sieć połączeń, bloki we/wy Współczesne układy FPGA Porównanie z ASIC Literatura
Układy FPGA Programowalne Układy Cyfrowe dr inż. Paweł Russek Program wykładu Geneza Technologia Struktura Funktory logiczne, sieć połączeń, bloki we/wy Współczesne układy FPGA Porównanie z ASIC Literatura
Cyfrowe układy scalone
 Cyfrowe układy scalone Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Cyfrowe układy scalone Układy cyfrowe
Cyfrowe układy scalone Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Cyfrowe układy scalone Układy cyfrowe
Projektowanie układów FPGA. Żródło*6+.
 Projektowanie układów FPGA Żródło*6+. Programowalne układy logiczne W elektronice cyfrowej funkcjonują dwa trendy rozwoju: Specjalizowane układy scalone ASIC (ang. Application Specific Integrated Circuits)
Projektowanie układów FPGA Żródło*6+. Programowalne układy logiczne W elektronice cyfrowej funkcjonują dwa trendy rozwoju: Specjalizowane układy scalone ASIC (ang. Application Specific Integrated Circuits)
Elektronika i techniki mikroprocesorowe
 Elektronika i techniki mikroprocesorowe Technika cyfrowa ZłoŜone one układy cyfrowe Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki Wydział Elektryczny, ul. Krzywoustego 2 PLAN WYKŁADU idea
Elektronika i techniki mikroprocesorowe Technika cyfrowa ZłoŜone one układy cyfrowe Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki Wydział Elektryczny, ul. Krzywoustego 2 PLAN WYKŁADU idea
Cyfrowe układy scalone
 Ryszard J. Barczyński, 2 25 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Układy cyfrowe stosowane są do przetwarzania informacji zakodowanej
Ryszard J. Barczyński, 2 25 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Układy cyfrowe stosowane są do przetwarzania informacji zakodowanej
UKŁAD SCALONY. Cyfrowe układy można podzielić ze względu na różne kryteria, na przykład sposób przetwarzania informacji, technologię wykonania.
 UKŁDAY CYFROWE Układy cyfrowe są w praktyce realizowane różnymi technikami. W prostych urządzeniach automatyki powszechnie stosowane są układy elektryczne, wykorzystujące przekaźniki jako podstawowe elementy
UKŁDAY CYFROWE Układy cyfrowe są w praktyce realizowane różnymi technikami. W prostych urządzeniach automatyki powszechnie stosowane są układy elektryczne, wykorzystujące przekaźniki jako podstawowe elementy
1.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych
 .Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
Programowalne Układy Cyfrowe Laboratorium
 Zdjęcie opracowanej na potrzeby prowadzenia laboratorium płytki przedstawiono na Rys.1. i oznaczono na nim najważniejsze elementy: 1) Zasilacz i programator. 2) Układ logiki programowalnej firmy XILINX
Zdjęcie opracowanej na potrzeby prowadzenia laboratorium płytki przedstawiono na Rys.1. i oznaczono na nim najważniejsze elementy: 1) Zasilacz i programator. 2) Układ logiki programowalnej firmy XILINX
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Układy logiczne układy cyfrowe
 Układy logiczne układy cyfrowe Jak projektować układy cyfrowe (systemy cyfrowe) Układy arytmetyki rozproszonej filtrów cyfrowych Układy kryptograficzne X Selektor ROM ROM AND Specjalizowane układy cyfrowe
Układy logiczne układy cyfrowe Jak projektować układy cyfrowe (systemy cyfrowe) Układy arytmetyki rozproszonej filtrów cyfrowych Układy kryptograficzne X Selektor ROM ROM AND Specjalizowane układy cyfrowe
Układy asynchroniczne
 Układy asynchroniczne Model układu asynchronicznego y x n UK y m układ kombinacyjny q k BP q k blok pamięci realizuje opóźnienia adeusz P x x t s tan stabilny s: δ(s,x) = s automacie asynchronicznym wszystkie
Układy asynchroniczne Model układu asynchronicznego y x n UK y m układ kombinacyjny q k BP q k blok pamięci realizuje opóźnienia adeusz P x x t s tan stabilny s: δ(s,x) = s automacie asynchronicznym wszystkie
Funkcje logiczne X = A B AND. K.M.Gawrylczyk /55
 Układy cyfrowe Funkcje logiczne AND A B X = A B... 2/55 Funkcje logiczne OR A B X = A + B NOT A A... 3/55 Twierdzenia algebry Boole a A + B = B + A A B = B A A + B + C = A + (B+C( B+C) ) = (A+B( A+B) )
Układy cyfrowe Funkcje logiczne AND A B X = A B... 2/55 Funkcje logiczne OR A B X = A + B NOT A A... 3/55 Twierdzenia algebry Boole a A + B = B + A A B = B A A + B + C = A + (B+C( B+C) ) = (A+B( A+B) )
Cyfrowe układy scalone
 Cyfrowe układy scalone Ryszard J. Barczyński, 2012 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Publikacja współfinansowana ze środków
Cyfrowe układy scalone Ryszard J. Barczyński, 2012 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Publikacja współfinansowana ze środków
Elementy struktur cyfrowych. Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych.
 Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. PTC 2015/2016 Magistrale W układzie cyfrowym występuje bank rejestrów do przechowywania
Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. PTC 2015/2016 Magistrale W układzie cyfrowym występuje bank rejestrów do przechowywania
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
ĆWICZENIE 7. Wprowadzenie do funkcji specjalnych sterownika LOGO!
 ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
Spis treści. Przedmowa Wykaz oznaczeń Wstęp Układy kombinacyjne... 18
 Spis treści Przedmowa... 11 Wykaz oznaczeń... 13 1. Wstęp... 15 1.1. Układycyfrowe... 15 1.2. Krótki esej o projektowaniu.... 15 2. Układy kombinacyjne... 18 2.1. Podstawyprojektowaniaukładówkombinacyjnych...
Spis treści Przedmowa... 11 Wykaz oznaczeń... 13 1. Wstęp... 15 1.1. Układycyfrowe... 15 1.2. Krótki esej o projektowaniu.... 15 2. Układy kombinacyjne... 18 2.1. Podstawyprojektowaniaukładówkombinacyjnych...
Systemy wbudowane. Uproszczone metody kosyntezy. Wykład 11: Metody kosyntezy systemów wbudowanych
 Systemy wbudowane Wykład 11: Metody kosyntezy systemów wbudowanych Uproszczone metody kosyntezy Założenia: Jeden procesor o znanych parametrach Znane parametry akceleratora sprzętowego Vulcan Początkowo
Systemy wbudowane Wykład 11: Metody kosyntezy systemów wbudowanych Uproszczone metody kosyntezy Założenia: Jeden procesor o znanych parametrach Znane parametry akceleratora sprzętowego Vulcan Początkowo
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki. ĆWICZENIE Nr 8 (3h) Implementacja pamięci ROM w FPGA
 Implementacja pamięci ROM w FPGA") Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 8 (3h) Implementacja pamięci ROM w FPGA Instrukcja pomocnicza do laboratorium z przedmiotu Programowalne Struktury
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 8 (3h) Implementacja pamięci ROM w FPGA Instrukcja pomocnicza do laboratorium z przedmiotu Programowalne Struktury
Elementy struktur cyfrowych. Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych.
 Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów do przechowywania danych. Wybór źródła danych
Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów do przechowywania danych. Wybór źródła danych
PAMIĘCI SYNCHRONICZNE
 PAMIĘCI SYNCHRONICZNE SDRAM SDRAM Synchroniczna, dynamiczna pamięć RAM Pamięci SDRAM to moduły 168-pinowe z 64-bitową magistralą (lub 72-bitową z kontrolą parzystości). Jest ich kilka rodzajów, ale te
PAMIĘCI SYNCHRONICZNE SDRAM SDRAM Synchroniczna, dynamiczna pamięć RAM Pamięci SDRAM to moduły 168-pinowe z 64-bitową magistralą (lub 72-bitową z kontrolą parzystości). Jest ich kilka rodzajów, ale te
Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe. Platforma sprzętowa. Rajda & Kasperek 2014 Katedra Elektroniki AGH 1
 Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe Platforma sprzętowa Rajda & Kasperek 2014 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6
Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe Platforma sprzętowa Rajda & Kasperek 2014 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6
Programowalne układy logiczne Wydziałowy Zakład Nanometrologii SEMESTR LETNI
 Programowalne układy logiczne Wydziałowy Zakład Nanometrologii SEMESTR LETNI Pierwszy projekt w środowisku ISE Design Suite Xilinx 1. Zapoznanie ze środowiskiem Xilinx ISE Design oraz językiem opisu sprzętu
Programowalne układy logiczne Wydziałowy Zakład Nanometrologii SEMESTR LETNI Pierwszy projekt w środowisku ISE Design Suite Xilinx 1. Zapoznanie ze środowiskiem Xilinx ISE Design oraz językiem opisu sprzętu
Systemy na Chipie. Robert Czerwiński
 Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Systemy na Chipie Robert Czerwiński Cel kursu Celem kursu jest zapoznanie słuchaczy ze współczesnymi metodami projektowania cyfrowych układów specjalizowanych, ze szczególnym uwzględnieniem układów logiki
Układy asynchroniczne
 Układy asynchroniczne Model układu sekwencyjnego Model układu asynchronicznego (synchronicznego) y 1 x n UK y m układ kombinacyjny Z clock t 1 q 1 k B x s tan stabilny s: δ(s,x) = s x blok pamięci jest
Układy asynchroniczne Model układu sekwencyjnego Model układu asynchronicznego (synchronicznego) y 1 x n UK y m układ kombinacyjny Z clock t 1 q 1 k B x s tan stabilny s: δ(s,x) = s x blok pamięci jest
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych. Instytut Telekomunikacji Zakład Podstaw Telekomunikacji
 POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Opiekun naukowy: dr
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Opiekun naukowy: dr
ćw. Symulacja układów cyfrowych Data wykonania: Data oddania: Program SPICE - Symulacja działania układów liczników 7490 i 7493
 Laboratorium Komputerowe Wspomaganie Projektowania Układów Elektronicznych Jarosław Gliwiński, Paweł Urbanek 1. Cel ćwiczenia ćw. Symulacja układów cyfrowych Data wykonania: 16.05.08 Data oddania: 30.05.08
Laboratorium Komputerowe Wspomaganie Projektowania Układów Elektronicznych Jarosław Gliwiński, Paweł Urbanek 1. Cel ćwiczenia ćw. Symulacja układów cyfrowych Data wykonania: 16.05.08 Data oddania: 30.05.08
LABORATORIUM UKŁADÓW PROGRAMOWALNYCH
 LABORATORIUM UKŁADÓW PROGRAMOWALNYCH Wydział Elektroniki Mikrosystemów i Fotoniki Politechnika Wrocławska Prowadzący: dr inż. Daniel Kopiec email: daniel.kopiec@pwr.edu.pl Konfiguracja układu DCM Digital
LABORATORIUM UKŁADÓW PROGRAMOWALNYCH Wydział Elektroniki Mikrosystemów i Fotoniki Politechnika Wrocławska Prowadzący: dr inż. Daniel Kopiec email: daniel.kopiec@pwr.edu.pl Konfiguracja układu DCM Digital
XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej. XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej
 Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów. Rafał Walkowiak Wersja /2015
 Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
Programowalne scalone układy cyfrowe PLD, CPLD oraz FPGA
 Programowalne scalone układy cyfrowe PLD, CPLD oraz FPGA Ogromną rolę w technice cyfrowej spełniają układy programowalne, często określane nazwą programowalnych modułów logicznych lub krótko hasłem FPLD
Programowalne scalone układy cyfrowe PLD, CPLD oraz FPGA Ogromną rolę w technice cyfrowej spełniają układy programowalne, często określane nazwą programowalnych modułów logicznych lub krótko hasłem FPLD
Układy programowalne. Wykład z ptc część 5
 Układy programowalne Wykład z ptc część 5 Pamięci ROM Pamięci stałe typu ROM (Read only memory) umożliwiają jedynie odczytanie informacji zawartej w strukturze pamięci. Działanie: Y= X j *cs gdzie j=linia(a).
Układy programowalne Wykład z ptc część 5 Pamięci ROM Pamięci stałe typu ROM (Read only memory) umożliwiają jedynie odczytanie informacji zawartej w strukturze pamięci. Działanie: Y= X j *cs gdzie j=linia(a).
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Przykładowa struktura systemu mikroprocesorowego IRQ AcDMA ReDMA Generator zegarowy fx fcpu fio fm System przerwań sprzętowych IRQ Bezpośredni dostęp do pamięci
Układy zegarowe w systemie mikroprocesorowym 1 Przykładowa struktura systemu mikroprocesorowego IRQ AcDMA ReDMA Generator zegarowy fx fcpu fio fm System przerwań sprzętowych IRQ Bezpośredni dostęp do pamięci