Podstawy Mechatroniki 2. Urządzenia mechatroniczne
|
|
|
- Dorota Wieczorek
- 8 lat temu
- Przeglądów:
Transkrypt
1 Podstawy Mechatroniki 2. Urządzenia mechatroniczne Politechnika Poznańska Katedra Podstaw Konstrukcji Maszyn Poznań, 09 listopada 2015

2 System mechatroniczny Sterowanie i regulacja Budowa systemu mechatronicznego
3 System mechatroniczny - struktura I System mechatroniczny Sterowanie i regulacja System mechatroniczny - zamknięty układ sterowania zbudowany z: obiektu podlegającego kontroli, modułu pomiarowego, układu sterującego, modułu nastawczego. Moduł pomiarowy - pojedynczy czujnik lub dodatkowe komponenty: wzmacniacz, modulator. Układ sterujący - rejestruje sygnały z modułu pomiarowego i w oparciu o algorytm sterujący wysyła sygnały do modułu nastawczego. Układ nastawczy - nastawniki i opcjonalnie źródło napięcia zasilania.
4 Wprowadzenie I System mechatroniczny Sterowanie i regulacja W systemach technicznych (np. urządzeniach) bardzo często występuje konieczność realizacji takich działań, żeby zmienne w czasie wielkości systemu miały określone przebiegi. W najprostszym przypadku wielkości te powinny mieć stałe wartości, pomimo działających na system zakłóceń. Tego rodzaju zadania można realizować przez zastosowanie sterowania i regulacji. Należy zatem wyjaśnić różnicę między tymi pojęciami.

5 Sterowanie I System mechatroniczny Sterowanie i regulacja Sterowanie jest działaniem, w którym należy zrealizować żądany przebieg czasowy własnej wielkości wyjściowej układu, przy czym wielkość na którą się oddziałuje nie jest mierzona. Cechą charakterystyczną sterowania jest otwarty przebieg działania. Nie ma sprzężenia zwrotnego wielkości wyjściowej układu z jego wejściem. Otwarty sposób działania jest często określany jako sterowanie w obwodzie otwartym.
 to uchyb regulacji, którym oddziałujemy na wielkość regulowaną, tak żeby była ona równa wielkości zadanej.")
6 Regulacja I System mechatroniczny Sterowanie i regulacja Regulacja to takie działanie, w którym wielkość regulowana jest ciągle mierzona i porównywana z wielkością zadaną. Wynik porównania (różnicy) to uchyb regulacji, którym oddziałujemy na wielkość regulowaną, tak żeby była ona równa wielkości zadanej. Takie działanie nazywamy sprzężeniem zwrotnym wyjścia układu z wejściem. Zbudowany w taki sposób zamknięty obwód jest określany jako obwód regulacji.

7 System mechatroniczny Sterowanie i regulacja Cechy układów sterowania i regulacji
8 Rodzaje regulacji I System mechatroniczny Sterowanie i regulacja Istnieje wiele różnych rozwiązań układów sterowania i regulacji I tak np. ze względu na rodzaj zadania regulacyjnego rozróżnia się układy: regulacji stałowartościowej (stabilizujące) oraz układy regulacji nadążnej (śledzące). W układach regulacji stałowartościowej wartość zadana jest stała w długim okresie czasu. Zadaniem układu regulacji jest minimalizacja oddziaływania na obiekt regulacji występujących zakłóceń. Natomiast w przypadku układów regulacji nadążnej wielkość zadana nie jest stała w czasie i może się zmieniać w sposób z góry nieprzewidziany (jest nieznaną funkcją czasu). Zadaniem urządzenia regulacyjnego jest możliwie dokładne odwzorowanie przebiegu czasowego wielkości zadanej na wyjściu obiektu (wielkości regulowanej).

9 System mechatroniczny Sterowanie i regulacja Wymagania stawiane układowi regulacji

10 Współczesny aparat fotograficzny I Mówiąc o urządzeniach mechatronicznych powinniśmy cofnąć się do lat 50, kiedy zaistniał termin mechatroniczny, jako opis układu automatycznego aparatu małoobrazkowego. Dosyć skomplikowane funkcje i sposób w jaki je realizował, pozwoliły na otrzymanie nowego typu konstrukcji. Współczesny sprzęt fotograficzny, zarówno ten klasyczny jak też cyfrowy, to typowy przykład rozwoju produktów mechatroniki.

11 Pralka automatyczna - programator elektromechaniczny

12 Pralka automatyczna - programator mikroprocesorowy
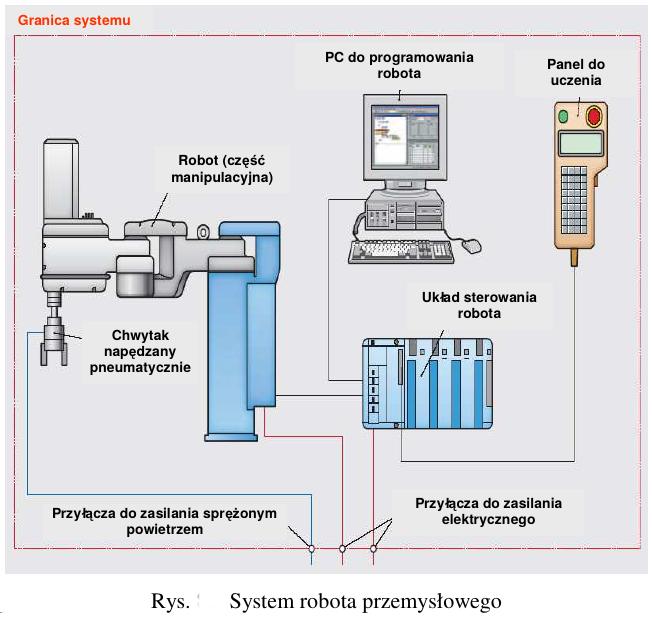
13 Robot przemysłowy I

14 Mechatroniczne podejście do projektowania Mechatroniczne podejście do projektowania charakteryzuje się tym, że system mechaniczny i elektroniczny od samego początku należy traktować jako zintegrowany przestrzennie i funkcjonalnie system całkowity.
15 Ładowarka teleskopowa - stawiane zadania Podstawowym celem ładowarki, pokazanej na rys. a, jest podnoszenie palet i umieszczanie ich zgodnie z potrzebami. Do wykonania takiego zadania konieczne jest sterowanie pozycją wideł zamocowanych na końcu wysięgnika teleskopowego, który może obracać się dokoła osi poziomej. Taka konstrukcja mechaniczna (z podstawowymi parametrami r i θ) jest stosowana przede wszystkim z powodu dużego zasięgu przy stosunkowo małych rozmiarach maszyny.
16 Ładowarka teleskopowa - wady I Konstrukcja taka nie nadaje się jednak zbyt dobrze do układania palet w stosy. Operator zwykle chce wtedy poruszać widłami poziomo lub pionowo. Ruchy zadania mają więc charakter kartezjański (x, y), w przeciwieństwie do biegunowego (r, θ) charakteru ruchu konstrukcji. Oczywiście można skonstruować ładowarkę w układzie kartezjańskim (x, y) (rys. b). Będzie ona jednak mieć mniejszy zasięg przy zwiększonych gabarytach
17 Ładowarka teleskopowa - podejście mechatroniczne Podejście mechatroniczne pozwala zbudować pojazd (podobny do robota) widziany jako zintegrowany system o 2 stopniach swobody. Zależność między ruchami konstrukcji (przestrzenią konstrukcji) i ruchami zadania (przestrzenią zadania) jest przetwarzana przez układ sterujący urządzenia.
18 Siłownik inteligentny (smart actuator) Poprawna konstrukcja mechatroniczna powinna zawierać siłownik inteligentny (smart actuator). Przetworniki (pozycji i prędkości tłoczyska), zawory elektromagnetyczne (serwozawory) i obwody interfejsowe umieszczone są w obudowie siłownika. Taki siłownik hydrauliczny można traktować podobnie jak urządzenia elektroniczne, które można prosto przyłączyć do standardowej magistrali (standard bus). Jedyna różnica to, że wymaga on zarówno przyłączenia siłowego zasilania hydraulicznego jak i elektrycznego.
19 Ładowarka teleskopowa - rozwiązanie mechatroniczne Skutek rozwiązania mechatronicznego jest dobitnie zilustrowany na rys. Rysunek ten pokazuje poprawę skuteczności operatora w prowadzeniu wideł po ścieżce prostokątnej. Ponieważ maszyna jawi się operatorowi jakby miała konstrukcję kartezjańską (x, y), jest bezpieczniejsza i łatwiejsza do nauki. Operator może operować jedną dźwignią (jedną ręką), pozostawiając drugą ręką do operowania innymi sterowaniami.
20 Kompensator naprężenia przędzy w nawijarce - zadania W przemyśle włókienniczym przędza jest często dostarczana do maszyn w postaci samych nawojów, bez nawinięcia jej na cewki czy szpulki. W końcowym procesie wytwarzania przędzy nawija się ją na stożek przy stałym stosunku średnic zwojów (jak to ma miejsce w nowoczesnych procesach z wolnym końcem przędzy). Jak widać na rys. a istnieje cyklicznie zmienne niedopasowanie między zasilaniem i odbiorem przędzy. Przyczyną jest różnica prędkości obwodowych, które występują na dużym i małym końcu stożka. Zmieniające się cyklicznie naprężenie przędzy powoduje złą jakość nawojów i często zrywanie przędzy.
21 Kompensator naprężenia przędzy w nawijarce - wady Przy małych prędkościach przędzy problem może być rozwiązany przez zastosowanie prostego kompensatora sprężynowego, używającego miękkiej sprężyny do utrzymania odpowiednio stałego naprężenia przędzy czy nici (podobnie jak naprężacz nici w maszynie do szycia). System taki pokazany jest na rys. b. Dwa kołki, wokół których przechodzi przędza, przymocowane są do talerzyka oscylującego wokół swej osi. Gasi on wahania naprężenia gdy przędza nawijana jest od małego do dużego końca stożka. Przy małych prędkościach nawijania to bierne urządzenie kompensacyjne pracuje bez zarzutu, przy dużych zawodzi. Doprowadziło to do rozwoju nowych mechanizmów kompensacji naprężenia.
22 Kompensator naprężenia przędzy - mechaniczny Na pierwszy rzut oka wydaje się to być łatwe. Można sobie wyobrazić, wychodząc z prostej geometrii stożka, że wymagany ruch kompensatora będzie łatwo zrealizować wyłącznie środkami mechanicznymi. W praktyce nie ma do tego środków. Po pierwsze, kąt wzniosu linii śrubowej, wzdłuż której przędza jest nawijana, zmienia się w skomplikowany sposób, częściowo wskutek praktycznych ograniczeń wytwarzania krzywki poprzecznej, rozdzielającej przędzę wzdłuż stożka. Po drugie, wymagana kompensacja zmienia się z biegiem operacji nawijania i ze wzrostem rozmiarów cewki (rys.c). Te problemy nie wykluczają rozwiązań czysto mechanicznych. Są one jednak zbyt złożone i kosztowne oraz z reguły zawierają powierzchnie ślizgowe (np. krzywki), które muszą być dokładnie uszczelnione przed dostępem włókien i kurzu jaki jest w przędzalni.

23 Kompensator naprężenia przędzy - mechatroniczny Mechanika mechatronicznego kompensatora naprężenia może być znacznie prostsza. Rysunek pokazuje takie urządzenie. Prosta dwukołkowa zasada biernego kompensatora sprężynowego pozostała, ale ruch talerzyka jest wymuszany przez mały silnik krokowy, sterowany mikroprocesorem. Strategia sterowania w obwodzie otwartym jest podyktowana niedostępnością jakiejkolwiek taniej i niezawodnej metody pomiaru naprężenia biegnącej przędzy.
24 Kompensator naprężenia przędzy - system sterowania Ruch tarczy jest zsynchronizowany z oscylacjami poprzecznej prowadnicy przędzy za pomocą czujnika optycznego, zamocowanego na czopie krzywki poprzecznej. Impulsy wyjściowe z enkodera są zliczane a talerzyk z kołeczkami obraca się o małe przyrosty zawsze wtedy, gdy odpowiednia liczba impulsów zostanie zliczona. Liczby impulsów, które muszą być znane zanim nastąpi kolejny krok silnika, gromadzone są w tablicy danych w pamięci sterownika mikroprocesorowego. W efekcie spełnia to funkcje krzywki elektronicznej.
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Wprowadzenie do mechatroniki
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wprowadzenie do mechatroniki Definicje dr inż.. Roland PAWLICZEK Zakres tematyczny Definicje: mechatronika, struktura systemu mechatronicznego,
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wprowadzenie do mechatroniki Definicje dr inż.. Roland PAWLICZEK Zakres tematyczny Definicje: mechatronika, struktura systemu mechatronicznego,
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Wprowadzenie do mechatroniki
 Sylwetka absolwenta Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Absolwent kierunku Mechatronika jest przygotowany do podjęcia pracy zawodowej w przemyśle: wytwarzającym układy mechatroniczne,
Sylwetka absolwenta Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Absolwent kierunku Mechatronika jest przygotowany do podjęcia pracy zawodowej w przemyśle: wytwarzającym układy mechatroniczne,
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Elementy układu automatycznej regulacji (UAR)
") 1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
SYSTEMY ENERGETYKI ODNAWIALNEJ
 SYSTEMY ENERGETYKI ODNAWIALNEJ Wykład: Układy sterowania i regulacji w energetyce Prowadzący: dr inż. Marcin Michalski kontakt: e-mail: energetyka.michalski@gmail.com energetyka.michalski Slajd 1 ZASADY
SYSTEMY ENERGETYKI ODNAWIALNEJ Wykład: Układy sterowania i regulacji w energetyce Prowadzący: dr inż. Marcin Michalski kontakt: e-mail: energetyka.michalski@gmail.com energetyka.michalski Slajd 1 ZASADY
Prowadzący: Prof. PWr Jan Syposz
 Automatyzacja w inżynierii środowiska Prowadzący: Wykład 1 Prof. PWr Jan Syposz Zakres tematyczny wykładu Wprowadzenie do techniki regulacji i sterowania Regulatory Programowanie sterowników swobodnie
Automatyzacja w inżynierii środowiska Prowadzący: Wykład 1 Prof. PWr Jan Syposz Zakres tematyczny wykładu Wprowadzenie do techniki regulacji i sterowania Regulatory Programowanie sterowników swobodnie
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Politechnika Gdańska
 Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
POLITECHNIKA GDAŃSKA
 POLITECHNIKA GDAŃSKA SEMINARIUM Z AUTOMATYKI CHŁODNICZEJ Budowa, działanie, funkcje uŝytkowe i przykłady typowego zastosowania sterowników do urządzeń chłodniczych i pomp ciepła Wykonał: Jan Mówiński SUCHiKl
POLITECHNIKA GDAŃSKA SEMINARIUM Z AUTOMATYKI CHŁODNICZEJ Budowa, działanie, funkcje uŝytkowe i przykłady typowego zastosowania sterowników do urządzeń chłodniczych i pomp ciepła Wykonał: Jan Mówiński SUCHiKl
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Podstawy PLC. Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń.
 Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
1. Wstęp. dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 4!!!
 Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 178034 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 309898 (22) Data zgłoszenia: 03.08.1995 (51) IntCl6: B 2 1 F 3/04
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 178034 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 309898 (22) Data zgłoszenia: 03.08.1995 (51) IntCl6: B 2 1 F 3/04
Klasyfikacja metod przetwarzania analogowo cyfrowego (A/C, A/D)
") Klasyfikacja metod przetwarzania analogowo cyfrowego (A/C, A/D) Metody pośrednie Metody bezpośrednie czasowa częstotliwościowa kompensacyjna bezpośredniego porównania prosta z podwójnym całkowaniem z potrójnym
Klasyfikacja metod przetwarzania analogowo cyfrowego (A/C, A/D) Metody pośrednie Metody bezpośrednie czasowa częstotliwościowa kompensacyjna bezpośredniego porównania prosta z podwójnym całkowaniem z potrójnym
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Ćwiczenie 2a. Pomiar napięcia z izolacją galwaniczną Doświadczalne badania charakterystyk układów pomiarowych CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
PL B1. INSTYTUT MECHANIKI GÓROTWORU POLSKIEJ AKADEMII NAUK, Kraków, PL BUP 21/08. PAWEŁ LIGĘZA, Kraków, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209493 (13) B1 (21) Numer zgłoszenia: 382135 (51) Int.Cl. G01F 1/698 (2006.01) G01P 5/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209493 (13) B1 (21) Numer zgłoszenia: 382135 (51) Int.Cl. G01F 1/698 (2006.01) G01P 5/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Układy zasilania samochodowych silników spalinowych. Bartosz Ponczek AiR W10
 Układy zasilania samochodowych silników spalinowych Bartosz Ponczek AiR W10 ECU (Engine Control Unit) Urządzenie elektroniczne zarządzające systemem zasilania silnika. Na podstawie informacji pobieranych
Układy zasilania samochodowych silników spalinowych Bartosz Ponczek AiR W10 ECU (Engine Control Unit) Urządzenie elektroniczne zarządzające systemem zasilania silnika. Na podstawie informacji pobieranych
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
PROJEKTOWANIE MECHATRONICZNE
 Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Temat: Sondy pojemnościowe nowoczesnym elementem do regulacji poziomu cieczy w aparatach instalacji chłodniczych.
 POLITECHNIKA GDAŃSKA Wydział Mechaniczny Katedra Techniki Cieplnej SEMINARIUM Z PRZEDMIOTU AUTOMATYKA CHŁODNICZA I KLIMATYZACYJNA Temat: Sondy pojemnościowe nowoczesnym elementem do regulacji poziomu cieczy
POLITECHNIKA GDAŃSKA Wydział Mechaniczny Katedra Techniki Cieplnej SEMINARIUM Z PRZEDMIOTU AUTOMATYKA CHŁODNICZA I KLIMATYZACYJNA Temat: Sondy pojemnościowe nowoczesnym elementem do regulacji poziomu cieczy
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Silnik prądu stałego. Sterowanie silnika prądu stałego
 Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 188152 (21) Numer zgłoszenia: 327709 (22) Data zgłoszenia: 23.07.1998 (13) B1 (51) Int.Cl.7: F24D 19/10
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 188152 (21) Numer zgłoszenia: 327709 (22) Data zgłoszenia: 23.07.1998 (13) B1 (51) Int.Cl.7: F24D 19/10
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
PR242012 23 kwietnia 2012 Mechanika Strona 1 z 5. XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów
 Rozszerzony System Transportowy: nowatorska technologia napędów") Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Układy sterowania: a) otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)
 otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)") Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Ćwiczenie 21 Temat: Komparatory ze wzmacniaczem operacyjnym. Przerzutnik Schmitta i komparator okienkowy Cel ćwiczenia
 Ćwiczenie 21 Temat: Komparatory ze wzmacniaczem operacyjnym. Przerzutnik Schmitta i komparator okienkowy Cel ćwiczenia Poznanie zasady działania układów komparatorów. Prześledzenie zależności napięcia
Ćwiczenie 21 Temat: Komparatory ze wzmacniaczem operacyjnym. Przerzutnik Schmitta i komparator okienkowy Cel ćwiczenia Poznanie zasady działania układów komparatorów. Prześledzenie zależności napięcia
ELEKTROMECHANICZNY SYGNALIZATOR POZIOMU SPMS-4
 Zakład Mechaniki Precyzyjnej Gliwice 17.10.2006 NIVOMER 44-100 Gliwice, ul. Portowa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl fax.tel. (032) 238-20-31 0601-40-31-21 ELEKTROMECHANICZNY SYGNALIZATOR
Zakład Mechaniki Precyzyjnej Gliwice 17.10.2006 NIVOMER 44-100 Gliwice, ul. Portowa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl fax.tel. (032) 238-20-31 0601-40-31-21 ELEKTROMECHANICZNY SYGNALIZATOR
Przetworniki A/C. Ryszard J. Barczyński, 2010 2015 Materiały dydaktyczne do użytku wewnętrznego
 Przetworniki A/C Ryszard J. Barczyński, 2010 2015 Materiały dydaktyczne do użytku wewnętrznego Parametry przetworników analogowo cyfrowych Podstawowe parametry przetworników wpływające na ich dokładność
Przetworniki A/C Ryszard J. Barczyński, 2010 2015 Materiały dydaktyczne do użytku wewnętrznego Parametry przetworników analogowo cyfrowych Podstawowe parametry przetworników wpływające na ich dokładność
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok
 Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Temat: Projektowanie sterownika rozmytego. Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE
 Temat: Projektowanie sterownika rozmytego Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie System
Temat: Projektowanie sterownika rozmytego Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie System
Pytania egzaminacyjne dla Kierunku Elektrotechnika. studia II stopnia stacjonarne i niestacjonarne
 A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
Regulatory wykonywane są z zaworami zamykanymi lub otwieranymi przy wzroście temperatury. Pozycja temperatury może być ukośna, pozioma lub pionowa.
 27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
Opis działania. 1. Opis działania. 1.1.1 Uwagi ogólne
 1. Opis działania 1.1.1 Uwagi ogólne Zawory elektromagnetyczne odcinają przepływ medium przy użyciu membrany lub uszczelki gniazda. Zawory elektromagnetyczne zamykają się szczelnie tylko w kierunku przepływu
1. Opis działania 1.1.1 Uwagi ogólne Zawory elektromagnetyczne odcinają przepływ medium przy użyciu membrany lub uszczelki gniazda. Zawory elektromagnetyczne zamykają się szczelnie tylko w kierunku przepływu
Inteligencja obliczeniowa
 Ćwiczenie nr 3 Zbiory rozmyte logika rozmyta Sterowniki wielowejściowe i wielowyjściowe, relacje rozmyte, sposoby zapisu reguł, aproksymacja funkcji przy użyciu reguł rozmytych, charakterystyki przejściowe
Ćwiczenie nr 3 Zbiory rozmyte logika rozmyta Sterowniki wielowejściowe i wielowyjściowe, relacje rozmyte, sposoby zapisu reguł, aproksymacja funkcji przy użyciu reguł rozmytych, charakterystyki przejściowe
Generatory przebiegów niesinusoidalnych
 Generatory przebiegów niesinusoidalnych Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Przerzutniki Przerzutniki
Generatory przebiegów niesinusoidalnych Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Przerzutniki Przerzutniki
Charakterystyka rozruchowa silnika repulsyjnego
 Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym
 Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
PRZYRZĄDY POMIAROWE. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRZYRZĄDY POMIAROWE Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Przyrządy pomiarowe Ogólny podział: mierniki, rejestratory, detektory, charakterografy.
PRZYRZĄDY POMIAROWE Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Przyrządy pomiarowe Ogólny podział: mierniki, rejestratory, detektory, charakterografy.
Część 5. Mieszane analogowo-cyfrowe układy sterowania
 Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Regulacja dwupołożeniowa (dwustawna)
") Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
w układzie zamkniętym, czyli w układzie ze sprzężeniem zwrotnym (układzie regulacji automatycznej):
:") Urządzenia wejściowe i wyjściowe do sterowników PLC. Przetworniki pomiarowe Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania;
Urządzenia wejściowe i wyjściowe do sterowników PLC. Przetworniki pomiarowe Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania;
3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW.
 3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW. Przy rozchodzeniu się fal dźwiękowych może dochodzić do częściowego lub całkowitego odbicia oraz przenikania fali przez granice ośrodków. Przeszkody napotykane
3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW. Przy rozchodzeniu się fal dźwiękowych może dochodzić do częściowego lub całkowitego odbicia oraz przenikania fali przez granice ośrodków. Przeszkody napotykane
Technologia Godna Zaufania
 SPRĘŻARKI ŚRUBOWE ZE ZMIENNĄ PRĘDKOŚCIĄ OBROTOWĄ IVR OD 7,5 DO 75kW Technologia Godna Zaufania IVR przyjazne dla środowiska Nasze rozległe doświadczenie w dziedzinie sprężonego powietrza nauczyło nas że
SPRĘŻARKI ŚRUBOWE ZE ZMIENNĄ PRĘDKOŚCIĄ OBROTOWĄ IVR OD 7,5 DO 75kW Technologia Godna Zaufania IVR przyjazne dla środowiska Nasze rozległe doświadczenie w dziedzinie sprężonego powietrza nauczyło nas że
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
BADANIE SILNIKA WYKONAWCZEGO PRĄDU STAŁEGO
 Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA WYKONAWCZEGO PRĄD STAŁEGO Warszawa 2003 1. WSTĘP. Silnik wykonawczy prądu stałego o wzbudzeniu
Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA WYKONAWCZEGO PRĄD STAŁEGO Warszawa 2003 1. WSTĘP. Silnik wykonawczy prądu stałego o wzbudzeniu
DANE TECHNICZNE LEO FB 10 V LEO FB 20 V LEO FB 30 V
 KARTA KATALOGOWA LEO FB 10 LEO FB 20 LEO FB 30 LEO FB 25 LEO FB 45 LEO FB 65 LEO FB 100 BIURO HANDLOWE ul. Chwaszczyńska 135 81-571 Gdynia tel. +48 (58) 627 57 20 info@flowair.pl KK LEO FB V 102030254565100.17.09
KARTA KATALOGOWA LEO FB 10 LEO FB 20 LEO FB 30 LEO FB 25 LEO FB 45 LEO FB 65 LEO FB 100 BIURO HANDLOWE ul. Chwaszczyńska 135 81-571 Gdynia tel. +48 (58) 627 57 20 info@flowair.pl KK LEO FB V 102030254565100.17.09
PL B1. ADAPTRONICA SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Łomianki, PL BUP 16/11
 PL 219996 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219996 (13) B1 (21) Numer zgłoszenia: 390194 (51) Int.Cl. G01P 7/00 (2006.01) G01L 5/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 219996 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219996 (13) B1 (21) Numer zgłoszenia: 390194 (51) Int.Cl. G01P 7/00 (2006.01) G01L 5/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Podstawy Automatyki. Wykład 12 - Układy przekaźnikowe. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
Systemy wbudowane. Paweł Pełczyński ppelczynski@swspiz.pl
 Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
PL 214324 B1. SMAY SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Kraków, PL 02.08.2010 BUP 16/10. JAROSŁAW WICHE, Kraków, PL 31.07.
 PL 214324 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214324 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387102 (22) Data zgłoszenia: 23.01.2009 (51) Int.Cl.
PL 214324 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214324 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387102 (22) Data zgłoszenia: 23.01.2009 (51) Int.Cl.
Poziome centra obróbkowe TBI SH 1000 (SK50)
") Poziome centra obróbkowe TBI SH 1000 (SK50) Precyzyjna, seryjna obróbka wielostronna oraz obróbka dużych skomplikowanych detali przestrzennych w jednym zamocowaniu. Ver_052017_02 Dbamy o solidną podstawę
Poziome centra obróbkowe TBI SH 1000 (SK50) Precyzyjna, seryjna obróbka wielostronna oraz obróbka dużych skomplikowanych detali przestrzennych w jednym zamocowaniu. Ver_052017_02 Dbamy o solidną podstawę
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Zakład Teorii Maszyn i Układów Mechatronicznych. LABORATORIUM Podstaw Mechatroniki. Sensory odległości
 Zakład Teorii Maszyn i Układów Mechatronicznych LABORATORIUM Podstaw Mechatroniki Sensory odległości Podstawy Mechatroniki Nazwa Stanowiska: Stanowisko do badania sensorów odległości Widok Stanowiska:
Zakład Teorii Maszyn i Układów Mechatronicznych LABORATORIUM Podstaw Mechatroniki Sensory odległości Podstawy Mechatroniki Nazwa Stanowiska: Stanowisko do badania sensorów odległości Widok Stanowiska:
DANE TECHNICZNE LEO FB 10 LEO FB 20 LEO FB 30 V M V M V M
 KARTA KATALOGOWA LEO FB 10 LEO FB 20 LEO FB 30 LEO FB 25 LEO FB 45 LEO FB 65 LEO FB 95 GŁÓWNE WYMIARY BIURO HANDLOWE ul. Chwaszczyńska 151E 81-571 Gdynia tel. +48 (58) 669 82 20 fax +48 (58) 627 57 21
KARTA KATALOGOWA LEO FB 10 LEO FB 20 LEO FB 30 LEO FB 25 LEO FB 45 LEO FB 65 LEO FB 95 GŁÓWNE WYMIARY BIURO HANDLOWE ul. Chwaszczyńska 151E 81-571 Gdynia tel. +48 (58) 669 82 20 fax +48 (58) 627 57 21
Automatyka przemysłowa na wybranych obiektach. mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław
 Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
PNEUMATYCZNA TECHNIKA PROPORCJONALNA
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
Podział układów cyfrowych. rkijanka
 Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
PL B1. ADAPTRONICA SPÓŁKA Z OGRANICZONĄ ODPOWIEDZIALNOŚCIĄ, Łomianki k. Warszawy, PL BUP 20/10
 PL 214845 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214845 (13) B1 (21) Numer zgłoszenia: 387534 (51) Int.Cl. F16F 9/50 (2006.01) F16F 9/508 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 214845 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214845 (13) B1 (21) Numer zgłoszenia: 387534 (51) Int.Cl. F16F 9/50 (2006.01) F16F 9/508 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL B1. DEERE & COMPANY,Moline,US ,US,10/285,732. Scott Svend Hendron,Dubuque,US Judson P. Clark,Dubuque,US Bryan D.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 201142 (13) B1 (21) Numer zgłoszenia: 363199 (51) Int.Cl. E01C 19/20 (2006.01) E02F 3/76 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 201142 (13) B1 (21) Numer zgłoszenia: 363199 (51) Int.Cl. E01C 19/20 (2006.01) E02F 3/76 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Modulatory PWM CELE ĆWICZEŃ PODSTAWY TEORETYCZNE
 Modulatory PWM CELE ĆWICZEŃ Poznanie budowy modulatora szerokości impulsów z układem A741. Analiza charakterystyk i podstawowych obwodów z układem LM555. Poznanie budowy modulatora szerokości impulsów
Modulatory PWM CELE ĆWICZEŃ Poznanie budowy modulatora szerokości impulsów z układem A741. Analiza charakterystyk i podstawowych obwodów z układem LM555. Poznanie budowy modulatora szerokości impulsów
REGULACJA TEMPERATURY W OBIEKTACH LĄDOWYCH
 REGULACJA TEMPERATURY W OBIEKTACH LĄDOWYCH TEHACO oferuje usługi w zakresie projektowania i dostawy kompletnych, kompaktowych urządzeń sterowniczych umożliwiających automatyczną regulację temperatury w
REGULACJA TEMPERATURY W OBIEKTACH LĄDOWYCH TEHACO oferuje usługi w zakresie projektowania i dostawy kompletnych, kompaktowych urządzeń sterowniczych umożliwiających automatyczną regulację temperatury w
BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO
 Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
LICZNIKI PODZIAŁ I PARAMETRY
 LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym cd...
 ze światem zewnętrznym cd...") Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym cd... wzmacniacze, przekaźniki, itp. Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym cd... wzmacniacze, przekaźniki, itp. Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa. Instrukcja do zajęć laboratoryjnych
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy o wzmacniaczu mocy. Takim obciążeniem mogą być na przykład...
 Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy
Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy