Moduł sterownika PID serwosilnika prądu stałego. DCS02.
|
|
|
- Juliusz Kubicki
- 9 lat temu
- Przeglądów:
Transkrypt
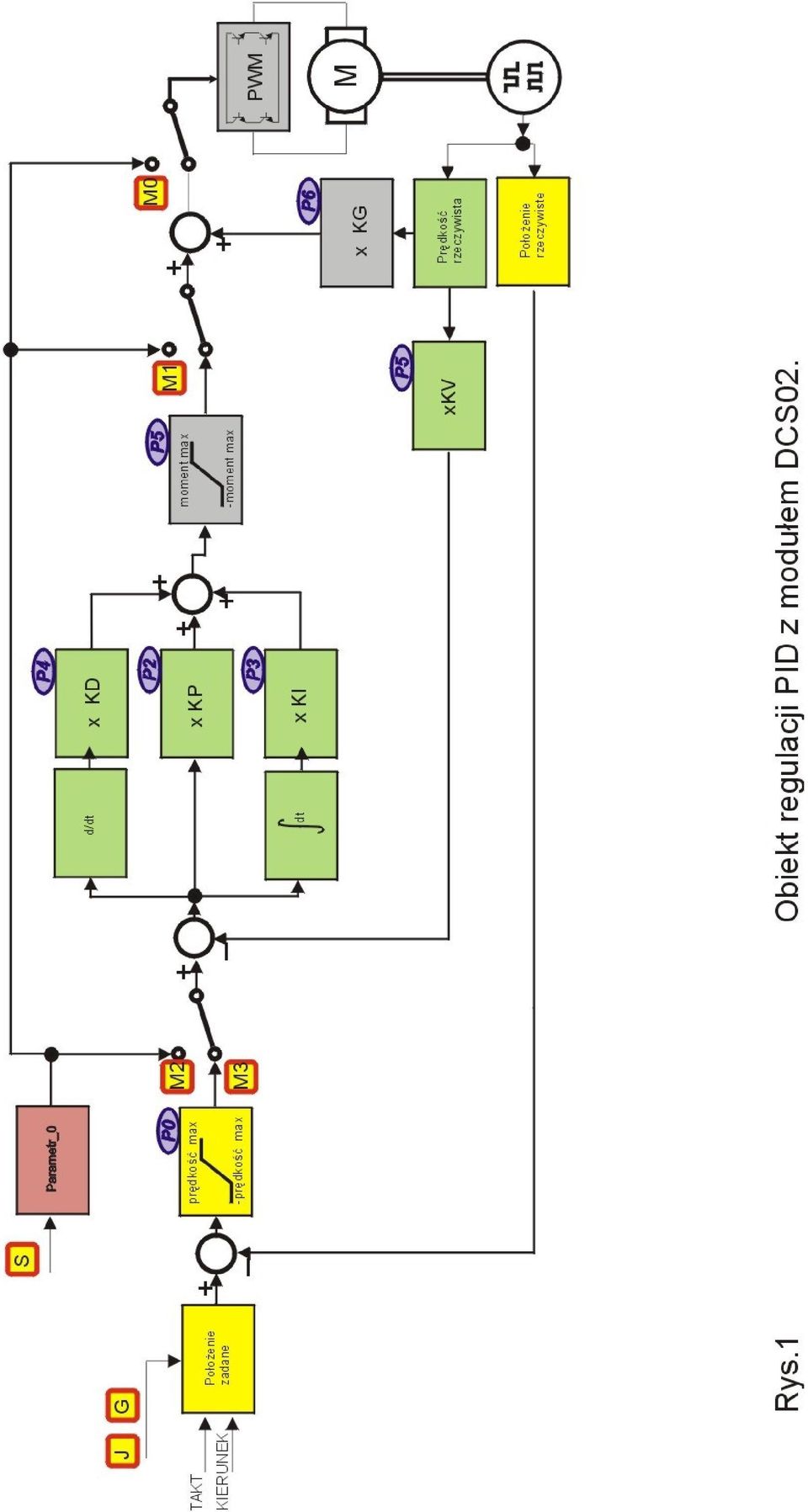
1 Pracownia Elektroniki i Automatyki W.J. Dubiński ul. Krzyszkowicka WIELICZKA tel./fax (12) NIP Moduł sterownika PID serwosilnika prądu stałego. DCS Przeznaczenie. Moduł DCS02 przeznaczony jest do realizacji funkcji pozycjonowania silnika komutatorowego prądu stałego wyposażonego w pomiar położenia dwufazowym przetwornikiem inkrementalnym. Wraz z silnikiem i sprzężonym kinematycznie przetwornikiem tworzy układ regulacji położenia i prędkości pracujący w układzie zamkniętym, z klasycznym algorytmem PID. Nastawy regulatora PID i pozostałe parametry mogą być indywidualnie programowane przez użytkownika, przez port szeregowy. Obszar zastosowań obejmuje ekonomiczne sterowania CNC i napędy w których konieczne jest pozycjonowanie. Może zastąpić napędy z silnikami skokowymi, będąc pozbawionym głównych wad wad tych napędów. Serwonapęd jest szybszy i może być przeciążany. Pracuje w typowym schemacie TAKT/KIERUNEK i może być podłączany do wyjść wieloosiowych układów interpolacji. 2. Opis budowy i działania modułu DCS02. Schemat blokowy modułu przedstawia rysunek 1. Obiekt regulacji stanowi silnik prądu stałego ze sprzężonym kinematycznie dwufazowym przetwornikiem inkrementalnym (enkoderem). Impulsy faz przetwornika (kwadratury) stanowią informację wejściową sprzężenia zwrotnego, na podstawie której mikrokontroler wylicza aktualną prędkość i położenie. Jako informacja, zadana podawane są impulsy wejściowe TAKT i KIERUNEK. Na ich podstawie mikrokontroler wylicza położenie i prędkość zadane. Sygnał uchybu jest różnicą wielkości zadanych i rzeczywistych. Jest on następnie przetwarzany według algorytmu PID. Uwzględniane są ograniczenia prędkości i momentu (prądu). Sygnałem wyjściowym z regulatora PID jest wypełnienie PWM i polaryzacja napięcia mostka tranzystorowego sterującego silnikiem prądu stałego. Współczynniki wzmocnienia PID, oraz pozostałe parametry przechowywane są w pamięci nieulotnej mikrokontrolera i mogą być programowane indywidualnie za pomocą komputera PC, przez port szeregowy. Moduł posiada zasilacz impulsowy 5V, dostarczający napięcia dla mikrokontrolera, przetwornika położenia i modułu MAX232 przy konfiguracji.

2
3 3. Dane techniczne. Obiekt sterowania : silnik prądu stałego komutatorowy. Pomiar położenia / prędkości: dwufazowy przetwornik impulsowy Algorytm regulacji PID realizacja mikrokontroler RISC. Zakres częstotliwości wejściowych do 80 khz. Częstotliwość przetwarzania 2kHz. Zakres napięć zasilania 12 do 36 V prądu stałego. Sygnał wyjściowy PWM 20kHz. Maksymalny prąd wyjściowy 5A. Wymiary 68 x 62 x 42 (wysokość) [mm] bez radiatora. Konfiguracja przez port szeregowy z komputera PC. Rys.2.

4 4. Podłączenie. Schemat podłączenia modułu DCS02 przedstawia rysunek 2. Wszelkie czynności związane z montażem modułu należy wykonywać przy wyłączonym zasilaniu. Moduł montować na dystansówkach do obudowy urządzenia. Zaleca się stosowanie obudów z materiału ferromagnetycznego, ekranujących pola elektromagnetyczne. Konieczne jest zastosowanie radiatora na układ scalony mostka tranzystorowego. Silnik i zasilanie należy podłączyć do listwy zaciskowej. Impulsy wejściowe z enkodera i z interpolatora doprowadzić przewodami ekranowanymi przylutowanymi do odcinków listwy pinowej męskiej. Ekrany należy łączyć w jednym punkcie do masy, od strony modułu DCS02. W podobny sposób na czas konfiguracji należy podłączyć konwerter poziomów typu MAX232 lub moduł USB do portu RS. Przed normalną eksploatacją należy wykonać fazowanie układu regulacji, oraz dobór nastaw regulatora PID i pozostałych parametrów. W celu poprawnego fazowania należy podłączyć silnik do listwy zaciskowej JP4 i przetwornik inkrementalny do złącza JP3. Włączyć zasilanie. Jeśli silnik stoi lub wykonuje niewielkie drgania, a próba obrócenia wału silnika powoduje narastający opór, układ jest zfazowany poprawnie. Jeśli silnik rusza z pełną prędkością po włączeniu zasilania lub lekkim obrocie wału, fazy są przesunięte o 180 stopni. Należy w takim przypadku zmienić biegunowość silnika. Uwaga : Aby zmienić orientację osi (kierunek obrotów silnika uznawany za dodatni) należy zamienić miedzy sobą jednocześnie bieguny silnika i fazy przetwornika położenia. Dobór nastaw regulatora i pozostałych parametrów powinien odbywać się na obiekcie regulacji (maszynie) w rzeczywistych warunkach obciążenia silnika. 5. Konfiguracja. Wartości parametrów zapisane w pamięci nieulotnej, czytane są w czasie restartu mikrokontrolera. Moduł posiada możliwość doboru optymalnych wartości parametrów dla danego obiektu regulacji i zapisywania ich do pamięci nieulotnej. W tym celu należy podłączyć moduł DCS02 do portu szeregowego lub USB komputera PC za pośrednictwem układu konwersji poziomów MAX232 lub modułu USB jak pokazano na rysunku 3. Rys.3. Algorytm postępowania przy konfiguracji modułu DCS02: Podłączyć moduł do komputera przy wyłączonym zasilaniu. Uruchomić program HyperTerminal i połączyć w trybie ,8,n,1. Włączyć zasilanie modułu.. Pojawi się komunikat: DCS02 Serwo Kontroler v1.0

5 PerForm 2006 i znak zachęty > Wykonać wymagane komendy. Wyłączyć zasilanie modułu, odłączyć moduł od komputera. 5. Opis rozkazów sesji terminalowej. I <ENTER> wyświetla identyfikator modułu. T<ENTER> wykonuje restart mikrokontrolera. M [tryb] <ENTER> ustawia tryb pracy modułu DCS02 [tryb] = [tryb] = 0: [tryb] = 1: [tryb] = 2: [tryb] = 3: tryb diagnostyczny ustawiania napięcia na zaciskach silnika. Wartość napięcia ustawiamy rozkazem S [parametr_0]. Zakres parametr_0: tryb diagnostyczny stabilizacji prądu (momentu) silnika Wartość prądu (momentu) ustawiamy rozkazem S [parametr_0]. Zakres parametr_0: tryb diagnostyczny stabilizacji prędkości obrotowej silnika Wartość prędkości ustawiamy rozkazem S [parametr_0]. Zakres parametr_0: tryb pracy w zamkniętym układzie regulacji PID. Tryb domyślny po restarcie mikrokontrolera. S [parametr_0] ustawia wartość parametru pomocniczego dla trybów diagnostycznych. Rozkazy w trybie 3: J [pozycja]<enter> G 0 [pozycja] <ENTER> Powoduje skok do położenia określonego wartością [pozycja]. Pozycja jest wartością z zakresu do Kontroler wysyła przez port szeregowy zdefiniowaną wcześniej rozkazem S ilość próbek położenia z przetwornika położenia co 0.5 ms. Rozkaz wykorzystywany do badania odpowiedzi regulatora na skok położenia. Format próbki położenia: 'l'<bajt_najstarszy><bajt_średni><bajt_najmłodszy>. Wykonuje ruch szybki o obwiedni trójkątnej, lub trapezoidalnej. Naciśnięcie dowolnego klawisza w czasie ruchu powoduje natychmiastowe zatrzymanie. Pozycja jest wartością z zakresu do G 1 [pozycja] [prędkość] <ENTER> Wykonuje ruch roboczy ze stałą prędkością określoną wartością [prędkość] do położenia określonego wartością [pozycja]. Naciśnięcie dowolnego klawisza w czasie ruchu powoduje natychmiastowe zatrzymanie. Pozycja jest wartością z zakresu do Prędkość jest wartością z zakresu 1 do wartości rejestru P7. L <ENTER> Powoduje wyświetlanie aktualnego położenia na ekranie terminala. Naciśnięcie dowolnego klawisza przerywa wykonywanie rozkazu.
![[tryb] = 0: [tryb] = 1: [tryb] = 2: [tryb] = 3: tryb diagnostyczny ustawiania napięcia na zaciskach silnika. Wartość napięcia ustawiamy rozkazem S [parametr_0]. Zakres parametr_0: -511.](/docs-images/48/3363366/images/page_5.jpg ".511. tryb diagnostyczny stabilizacji prądu (momentu) silnika Wartość prądu (momentu) ustawiamy rozkazem S [parametr_0]. Zakres parametr_0: -511..511. tryb diagnostyczny stabilizacji prędkości obrotowej silnika Wartość prędkości ustawiamy rozkazem S [parametr_0].")
6 Rozkazy ustawiania rejestrów: P [adres] [wartość] <ENTER> wpisuje wartość [wartość] do rejestru określonego adresem [adres]. W [bank] <ENTER> zapisuje wartości wszystkich parametrów do banku pamięci EEPROM określonego adresem [bank]. [bank] = Po restarcie mikrokontrolera ładowany jest bank 0. R [bank] <ENTER> ładuje wartości parametrów z pamięci EEPROM, z banku określonego adresem [bank]. 6. Opis rejestrów modułu DCS02. Oznaczenia: Limit_v maksymalna prędkość obrotowa silnika [1/min]. Enc stała przetwornika inkrementalnego ilość impulsów na jeden obrót. KV wzmocnienie sprzężenia zwrotnego prędkości. KP wzmocnienie członu proporcjonalnego regulatora. KI wzmocnienie członu całkującego regulatora. KD wzmocnienie członu różniczkujacego regulatora. U_zas napięcie zasilania silnika [V]. U_nom napięcie znamionowe silnika [V]. N_nom obroty znamionowe silnika [1/min]. KG współczynnik kompensacji SEM silnika. Feed prędkość obrotowa silnika [1/min]. Acc przyspieszenie / hamowanie [(1/min)/s]. PWM_Max ograniczenie PWM sterowania silnikiem [%]. Format danych: Liczba całkowita dwubajtowa liczba całkowita nieujemna. Liczba stałoprzecinkowa dwubajtowa liczba nieujemna w układzie liczbowym o podstawie 256, w której starszy bajt oznacza część całkowitą a młodszy ułamkową o mianowniku 256.
![R [bank] <ENTER> ładuje wartości parametrów z pamięci EEPROM, z banku określonego adresem [bank]. 6. Opis rejestrów modułu DCS02. Oznaczenia: Limit_v maksymalna prędkość obrotowa silnika [1/min].](/docs-images/48/3363366/images/page_6.jpg "Enc stała przetwornika inkrementalnego ilość impulsów na jeden obrót. KV wzmocnienie sprzężenia zwrotnego prędkości. KP wzmocnienie członu proporcjonalnego regulatora.")
7 Adres rejestru Nazwa parametru Typ Sposób wyliczenia 0 Limit prędkości Liczba całkowita Limit_v * KV * Enc / Wzmocnienie sprzężenia zwrotnego prędkości Liczba stałoprzecinkowa 2 Wzmocnienie P Liczba stałoprzecinkowa 3 Wzmocnienie I Liczba stałoprzecinkowa 4 Wzmocnienie D Liczba stałoprzecinkowa KV * 256 KP * 256 KI * 256 KD * Ograniczenie momentu Liczba całkowita PWM_Max* Wzmocnienie kompensacji SEM 7 Prędkość ruchu jednostajnego dla rozkazu G0 8 Przyspieszenie dla rozkazu G0 Liczba stałoprzecinkowa Liczba całkowita Feed * Enc / 117 Liczba całkowita Acc * Enc /23400 ( * KG * U_nom/( N_nom*Enc * U_zas)) * *256 Przykład: Konfiguracja sterownika dla silnika o następujących danych: Napięcie znamionowe 12 [V]. Napięcie zasilania silnika 12 [V]. Obroty znamionowe 4000 [1/min] Stała przetwornika inkrementalnego 500 [impulsów/obrót]. Założone parametry przetwarzania układu regulacji : KV = 4.0 KP = 3.0 KI = 0.3 KD = 0.15 Limit prądu ustalamy na poziomie 80% pradu znamionowego. Limit prędkości ustalamy na poziomie 90% obrotów znamionowych czyli 3600[1/min]. Prędkość maksymalna silnik ma osiągać po upływie 1 [s], czyli przyspieszenie wynosi 3600[(1/min)/s]. Współczynnik SEM KG = 0.3 (kompensujemy 30% SEM wytwarzanej przez silnik DC) Rejestr 0: Wartość wpisana do rejestru : 3600*4*500/30000=240. Rejestr 1: Wartość wpisana do rejestru : 4*256=1024. Rejestr 2: Wartość wpisana do rejestru : 3*256=768. Rejestr 3: Wartość wpisana do rejestru : 0.3*256=77. Rejestr 4: Wartość wpisana do rejestru : 0.15*256=38. Rejestr 5: Wartość wpisana do rejestru : 80*5.15=409. Rejestr 6: Wartość wpisana do rejestru : ( *0.3*12/(4000*500*12)) * 256 =295. Rejestr 7: Wartość wpisana do rejestru : 3600*500/117=15384.
) * *256 Przykład: Konfiguracja sterownika dla silnika o następujących danych: Napięcie znamionowe 12 [V]. Napięcie zasilania silnika 12 [V].")
8 Rejestr 8: Wartość wpisana do rejestru : 3600*500/23400= Wartości parametrów domyślne. Bank 0: (Ustawiany w czasie restartu mikrokontrolera) Wariant umiarkowany dla układów o małym tłumieniu wiskotycznym i małym zredukowanym momencie bezwładności. Regulacja PD. 1200; 8000; 768; 96; 0; 240; 260; 6656; 32; Bank 1: Wariant dla układów z dużym tłumieniem wiskotycznym (śruby i prowadnice cierne) z dużym zredukowanym momentem władnosci. Regulacja PID. 1200;8000; 1024; 128; 64; 240; 512; 6656; 24; Bank 2: Wariant diagnostyczny. Regulacja P. 1200; 8000; 512; 0; 0; 240 ;200; 6656; 32; Bank 3: Wariant o gwarantowanej stabilności bez korekty SEM. 1200; 4000; 512; 0; 0; 160 ; 0; 4000; 16; 8. Opis złącz. JP2. Port RS złącze portu szeregowego do ustawiania konfiguracji V napięcie zasilania modułu MAX Tx wyjście transmisji szeregowej RS232 poziom TTL. 3. Rx wejście transmisji szeregowej RS232 poziom TTL. 4. Masa Uwaga: Modułu nie należy podłączać bezpośrednio do komputera PC. Konieczne jest zastosowanie konwertera poziomów. JP3. Wejście enkodera. 1. Masa. 2. Faza_A wejście fazy A, poziom TTL. 3. Faza_B wejście fazy B, poziom TTL V zasilanie enkodera. JP4. Listwa zaciskowa. 1. Masa Minus zasilania. 2. Silnik A Podłączenie silnika A. 3. Silnik B Podłączenie silnika B. 4. Plus zasilania 12-36V. JP5. Wejścia interpolacji. 1. Masa sygnałowa. 2. /LUZ. Stan niski powoduje wyłączenie prądu silnika. 3. KIERUNEK. Poziom wysoki wyznacza kierunek dodatni ruchu, poziom niski kierunek ujemny. 4. TAKT. Opadające zbocze powoduje obrót osi silnika wymuszający jeden impuls enkodera.

9 9. Dobór nastaw regulatora PID przy użyciu programu DCS Monitor. W celu ułatwienia ustawiania modułu sterownika DCS powstał program DCS Monitor. Program działa tylko z interfejsem USB. Nastawy regulatora należy ustawiać na docelowym obiekcie regulacji. Jeśli zredukowany moment bezwładności może przyjmować różne wartości (np. ruchomy stół w obrabiarce może być obciążony przedmiotem o różnej masie) wskazane jest dokonanie doboru nastaw przy maksymalnym obciążeniu inercyjnym, a następnie sprawdzenie dynamiki przy minimalnym obciążeniu inercyjnym. Istotą działania regulatora jest generowanie reakcji przeciwdziałającej uchybowi, czyli różnicy między położeniem zadanym a rzeczywistym obiektu regulacji. Uchyb istnieje zawsze a regulator usiłuje zmniejszyć go go zera. Celem optymalizacji nastaw jest uzyskanie minimalnego uchybu w funkcji czasu. Regulator musi zapewniać stabilność układu w całym zakresie kinematyki i obciążeń. Niestabilność polega na wykonywaniu ruchu oscylacyjnego lub jazdy z maksymalna prędkością niezależnie od sterowania. Znaczący wpływ na działanie regulatora ma konstrukcja mechaniczna napędu. Regulator lepiej działa na napędzie bez luzów, sztywnym o małym zredukowanym momencie bezwładności i dużym tłumieniu wiskotycznym np ze śrubami i prowadnicami ciernymi. Dużo gorzej steruje się układem z luzem, mało sztywnym o dużej inercji i małym tłumieniu. Sposób postępowania: (1) Podłączyć komputer do sterownika przez odpowiedni interfejs USB2RS. Uruchomić program DCS Monitor. Ustawić parametry napędu w zakładce dane serwosilnika. (2) W zakładce nastawy regulatora ustawić wartości KD, KI, KG na 0. Limit momentu na 30%. Limit prędkości dobrać tak aby częstotliwość impulsów przetwornika pomnożona przez 4 nie przekroczyła 80 khz. KV ustawić na 4.0, KP na poziomie 1.5. Wpisać parametry do regulatora. (3) Wykonać skok położenia dla kąta obrotu stopni i czasu do 250 ms. (4) Iteracyjnie zwiększać wzmocnienie KP i wykonywać skok położenia aż do utraty stabilności. (5) Po utracie stabilności zwiększyć wzmocnienie KV aż do powrotu stabilności. (6) Ustawić wzmocnienie KI na poziomie tak aby wyeliminować błąd statyczny. (7) Ustawić wzmocnienie KD na poziomie tak aby zminimalizować przeregulowanie, jeśli występuje. Jeśli nie pozostawić wartość 0. (8) Metodą prób dobrać współczynniki KV. KP, KI, (KD) tak aby osiągnąć minimalne przeregulowanie (jeśli występuje), minimalną wartość całki modułu uchybu, minimalny czas ustalenia. Zwiększanie KP zmniejsza przeregulowanie i uchyb statyczny, w dalszym ciągu powoduje niestabilność. Zwiększanie KI likwiduje uchyb statyczny. Zwiększanie KD zmniejsza przeregulowanie i powiększa zapas stabilności KP. Zwiększanie KV zmniejsza czas ustalenia. (9) Zwiększyć wartość PWM limitu momentu do poziomu %. Należy uważać przy silnikach zasilanych napięciem wyższym od znamionowego. Jeśli przy wolnych ruchach roboczych (G1) silnik nadmiernie sie grzeje lub działa zabezpieczenie nadprądowe (pulsowanie ruchu), należy zmniejszyć wartość limitu PWM. (10) Zwiększyć wartość KG do poziomu , tak aby nie utracić stabilności. Jeśli w czasie szybkiego ruchu jałowego (G0) działa zabezpieczenie nadprądowe (pulsowanie ruchu), należy wartość KG zmniejszyć. (11) Przy pomocy funkcji na zakładce diagnostyka oszacować maksymalną prędkość ruchu i skorygować limit prędkości regulatora. (12) Zapisać wartości nastaw do banku pamięci 0.

10

Moduł licznika położenia LP 2.
 Pracownia Elektroniki i Automatyki W.J. Dubiński ul. Krzyszkowicka 16 32-020 WIELICZKA tel./fax (12) 278 29 11 NIP 676-010-37-14 Moduł licznika położenia LP 2. 1. Przeznaczenie. Licznik rewersyjny LP 2
Pracownia Elektroniki i Automatyki W.J. Dubiński ul. Krzyszkowicka 16 32-020 WIELICZKA tel./fax (12) 278 29 11 NIP 676-010-37-14 Moduł licznika położenia LP 2. 1. Przeznaczenie. Licznik rewersyjny LP 2
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu
 Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Licznik rewersyjny MD100 rev. 2.48
 Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Nazwa błędu Możliwe przyczyny błędu Rozwiązanie problemu
 E001 E002 Brak / / 1) Chwilowa utrata zasilania 2) Napięcie zasilające nie spełnia założonych wymogów Niskie napięcie 3) Uszkodzenie mostka szyny DC prostowniczego i rezystancji buforującej 4) Uszkodzenie
E001 E002 Brak / / 1) Chwilowa utrata zasilania 2) Napięcie zasilające nie spełnia założonych wymogów Niskie napięcie 3) Uszkodzenie mostka szyny DC prostowniczego i rezystancji buforującej 4) Uszkodzenie
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Interfejs analogowy LDN-...-AN
 Batorego 18 sem@sem.pl 22 825 88 52 02-591 Warszawa www.sem.pl 22 825 84 51 Interfejs analogowy do wyświetlaczy cyfrowych LDN-...-AN zakresy pomiarowe: 0-10V; 0-20mA (4-20mA) Załącznik do instrukcji obsługi
Batorego 18 sem@sem.pl 22 825 88 52 02-591 Warszawa www.sem.pl 22 825 84 51 Interfejs analogowy do wyświetlaczy cyfrowych LDN-...-AN zakresy pomiarowe: 0-10V; 0-20mA (4-20mA) Załącznik do instrukcji obsługi
W.J WIELICZKA
 Możliwość sterowania modelem robota do ośmiu stopni swobody lub innym urządzeniem wymagającym kontroli ruchu przestrzennego. Rozdzielczość pozycjonowania 512 położeń 9 bitów. Sterowanie z komputera przez
Możliwość sterowania modelem robota do ośmiu stopni swobody lub innym urządzeniem wymagającym kontroli ruchu przestrzennego. Rozdzielczość pozycjonowania 512 położeń 9 bitów. Sterowanie z komputera przez
Uniwersalny sterownik silnika krokowego z portem szeregowym RS232 z procesorem AT90S2313 na płycie E200. Zestaw do samodzielnego montażu.
 microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
E228a. Sterownik interpolujący 3D do sterowania ruchem przestrzennym z komputera PC przez port szeregowy RS232C. 1. Opis.
 ü Sterowanie CNC do trzech osi frezarką lub ploterem grawerującym NC. ü Współpraca z typowymi sterownikami / driverami silników krokowych lub serwosilników poszczególnych osi ü Port szeregowy RS232 do
ü Sterowanie CNC do trzech osi frezarką lub ploterem grawerującym NC. ü Współpraca z typowymi sterownikami / driverami silników krokowych lub serwosilników poszczególnych osi ü Port szeregowy RS232 do
Serwonapędy AC Serie EDC, EDB, ProNet
 Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Serwonapędy AC Serie EDC, EDB, ProNet Seria EDC: moc 0.2 kw 0.75 kw. sterowanie pozycją - wyświetlacz (tylko w serii EDB) - edycja parametrów, alarmy - wejścia cyfrowe i analogowe, wyjścia cyfrowe - kompatybilne
Funkcjonowanie i budowa modelu układu regulacji temperatury. Jakub Rotkiewicz AIR 2018
 Funkcjonowanie i budowa modelu układu regulacji temperatury Jakub Rotkiewicz AIR 2018 Opis i przeznaczenie układu Przedmiotem prezentacji jest układ regulacji umożliwiający utrzymywanie temperatury na
Funkcjonowanie i budowa modelu układu regulacji temperatury Jakub Rotkiewicz AIR 2018 Opis i przeznaczenie układu Przedmiotem prezentacji jest układ regulacji umożliwiający utrzymywanie temperatury na
Licznik prędkości LP100 rev. 2.48
 Licznik prędkości LP100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Licznik prędkości LP100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
Instrukcja Obsługi. Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH
 Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Rotor RAS
 Rotor RAS e-mail: spid@alpha.pl www.spid.alpha.pl OPIS Rotor RAS jest rotorem o dużej wytrzymałości, zaprojektowanym do obracania dużych anten satelitarnych, dostarczanym wraz z elektronicznym modułem
Rotor RAS e-mail: spid@alpha.pl www.spid.alpha.pl OPIS Rotor RAS jest rotorem o dużej wytrzymałości, zaprojektowanym do obracania dużych anten satelitarnych, dostarczanym wraz z elektronicznym modułem
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Terminal TR01. Terminal jest przeznaczony do montażu naściennego w czystych i suchych pomieszczeniach.
 Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
Konwerter Transmisji KT-02
 EL-TEC Sp. z o.o. e-mail: info@el-tec.com.pl http://www.el-tec.com.pl Konwerter Transmisji KT-02 Dokumentacja Techniczno Ruchowa Spis treści 1. Opis działania...3 1.1. Dane techniczne...4 1.2. Instalacje
EL-TEC Sp. z o.o. e-mail: info@el-tec.com.pl http://www.el-tec.com.pl Konwerter Transmisji KT-02 Dokumentacja Techniczno Ruchowa Spis treści 1. Opis działania...3 1.1. Dane techniczne...4 1.2. Instalacje
INDU-40. Przemysłowy Sterownik Mikroprocesorowy. Przeznaczenie. Dozowniki płynów, mieszacze płynów.
 Przemysłowy Sterownik Mikroprocesorowy INDU-40 Przeznaczenie Dozowniki płynów, mieszacze płynów. Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77, Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl
Przemysłowy Sterownik Mikroprocesorowy INDU-40 Przeznaczenie Dozowniki płynów, mieszacze płynów. Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77, Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl
MiniModbus 4DO. Moduł rozszerzający 4 wyjścia cyfrowe. Wyprodukowano dla. Instrukcja użytkownika
 Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
Sterownik momentu obrotowego silnika prądu stałego
 Politechnika Wrocławska Projekt Sterownik momentu obrotowego silnika prądu stałego Autorzy: Paweł Bogner Marcin Dmochowski Prowadzący: mgr inż. Jan Kędzierski 30.04.2012 r. 1 Opis ogólny Celem projektu
Politechnika Wrocławska Projekt Sterownik momentu obrotowego silnika prądu stałego Autorzy: Paweł Bogner Marcin Dmochowski Prowadzący: mgr inż. Jan Kędzierski 30.04.2012 r. 1 Opis ogólny Celem projektu
Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia
 Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
INSTRUKCJA OBSŁUGI REGULATOR TEMPERATURY DESTYLATORA FIRMWARE VER: F UWAGI DOTYCZĄCE BEZPIECZEŃSTWA
 INSTRUKCJA OBSŁUGI REGULATOR TEMPERATURY DESTYLATORA FIRMWARE VER: F2.0 1. UWAGI DOTYCZĄCE BEZPIECZEŃSTWA - Przed pierwszym uruchomieniem należy zapoznać się z niniejszą instrukcją obsługi. - Wszelkich
INSTRUKCJA OBSŁUGI REGULATOR TEMPERATURY DESTYLATORA FIRMWARE VER: F2.0 1. UWAGI DOTYCZĄCE BEZPIECZEŃSTWA - Przed pierwszym uruchomieniem należy zapoznać się z niniejszą instrukcją obsługi. - Wszelkich
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Softstart z hamulcem MCI 25B
 MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
Otwór w panelu WYMIAR MINIMALNIE OPTYMALNIE MAKSYMALNIE A 71(2,795) 71(2,795) 71,8(2,829) B 29(1,141) 29(1,141) 29,8(1,173)
 71(2,795) 71,8(2,829) B 29(1,141) 29(1,141) 29,8(1,173)") EVK401 Cyfrowy Termoregulator ogólnego zastosowania z pojedynczym wyjściem 1. WSTĘP 1.1 Ważne Przed montażem i użytkowaniem należy uważnie przeczytać następującą instrukcję, ściśle stosować się do dodatkowych
EVK401 Cyfrowy Termoregulator ogólnego zastosowania z pojedynczym wyjściem 1. WSTĘP 1.1 Ważne Przed montażem i użytkowaniem należy uważnie przeczytać następującą instrukcję, ściśle stosować się do dodatkowych
LUZS-12 LISTWOWY UNIWERSALNY ZASILACZ SIECIOWY DOKUMENTACJA TECHNICZNO-RUCHOWA. Wrocław, kwiecień 1999 r.
 LISTWOWY UNIWERSALNY ZASILACZ SIECIOWY DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, kwiecień 1999 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S. Jaracza 57-57a TEL. 602-62-32-71 str.2 SPIS TREŚCI 1.OPIS
LISTWOWY UNIWERSALNY ZASILACZ SIECIOWY DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, kwiecień 1999 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S. Jaracza 57-57a TEL. 602-62-32-71 str.2 SPIS TREŚCI 1.OPIS
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
LDPY-11 LISTWOWY DWUPRZEWODOWY PRZETWORNIK POŁOŻENIA DOKUMENTACJA TECHNICZNO-RUCHOWA. Wrocław, czerwiec 1997 r.
 LISTWOWY DWUPRZEWODOWY PRZETWORNIK POŁOŻENIA DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, czerwiec 1997 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S.JARACZA 57-57A TEL. 0-602-62-32-71 str.2 SPIS TREŚCI
LISTWOWY DWUPRZEWODOWY PRZETWORNIK POŁOŻENIA DOKUMENTACJA TECHNICZNO-RUCHOWA Wrocław, czerwiec 1997 r. 50-305 WROCŁAW TEL./FAX (+71) 373-52-27 ul. S.JARACZA 57-57A TEL. 0-602-62-32-71 str.2 SPIS TREŚCI
Enkoder magnetyczny AS5040.
 Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI. Wrocław, lipiec 1999 r.
 TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI Wrocław, lipiec 1999 r. SPIS TREŚCI 1. OPIS TECHNICZNY...3 1.1. PRZEZNACZENIE I FUNKCJA...3 1.2. OPIS
TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI Wrocław, lipiec 1999 r. SPIS TREŚCI 1. OPIS TECHNICZNY...3 1.1. PRZEZNACZENIE I FUNKCJA...3 1.2. OPIS
Kod produktu: MP01611-ZK
 ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Dokumentacja Techniczna. Konwerter USB/RS-232 na RS-285/422 COTER-24I COTER-24N
 Dokumentacja Techniczna Konwerter USB/RS-232 na RS-28/422 -U4N -U4I -24N -24I Wersja dokumentu: -man-pl-v7 Data modyfikacji: 2008-12-0 http://www.netronix.pl Spis treści 1. Specyfikacja...3 2. WyposaŜenie...4
Dokumentacja Techniczna Konwerter USB/RS-232 na RS-28/422 -U4N -U4I -24N -24I Wersja dokumentu: -man-pl-v7 Data modyfikacji: 2008-12-0 http://www.netronix.pl Spis treści 1. Specyfikacja...3 2. WyposaŜenie...4
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
LB-470 Konwerter standardu S300 na wyjście 4..20mA. Wersja 1.1 do współpracy z termohigrometrem LB-710.
 ELEKTRONIKA LABORATORYJNA Sp.J. ul. Herbaciana 9, 05-816 Reguły tel. (22) 753 61 30 fax (22) 753 61 35 email: info@label.pl http://www.label.pl LB-470 Konwerter standardu S300 na wyjście 4..20mA. Wersja
ELEKTRONIKA LABORATORYJNA Sp.J. ul. Herbaciana 9, 05-816 Reguły tel. (22) 753 61 30 fax (22) 753 61 35 email: info@label.pl http://www.label.pl LB-470 Konwerter standardu S300 na wyjście 4..20mA. Wersja
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Instrukcja obsługi. SQCA244 instrukcja obsługi
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. PPH WObit
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
NARZĘDZIE KONFIGURACYJNE VNX SETUP TOOL MODUŁÓW RODZINY VNX ADVANCED
 NARZĘDZIE KONFIGURACYJNE VNX SETUP TOOL MODUŁÓW RODZINY VNX ADVANCED WSTĘP Nowa generacja modułów rodziny VNX ADVANCED posiada znacznie większe możliwości, niż dotychczas oferowane moduły. Jednym z istotnych
NARZĘDZIE KONFIGURACYJNE VNX SETUP TOOL MODUŁÓW RODZINY VNX ADVANCED WSTĘP Nowa generacja modułów rodziny VNX ADVANCED posiada znacznie większe możliwości, niż dotychczas oferowane moduły. Jednym z istotnych
Instrukcja obsługi SDC106
 Instrukcja obsługi SDC106 Sterownik silnika DC do 6A Z regulacją kierunku i prędkości obrotów PPH WObit E.J.K. SC 61-474 Poznań, ul. Gruszkowa 4 tel.(061) 835 06 20, fax.(061) 835 07 04 e-mail: wobit@wobit.com.pl
Instrukcja obsługi SDC106 Sterownik silnika DC do 6A Z regulacją kierunku i prędkości obrotów PPH WObit E.J.K. SC 61-474 Poznań, ul. Gruszkowa 4 tel.(061) 835 06 20, fax.(061) 835 07 04 e-mail: wobit@wobit.com.pl
Moduł przekaźnika czasowego FRM01. Instrukcja obsługi
 Moduł przekaźnika czasowego FRM01 Instrukcja obsługi Przekaźnik wielofunkcyjny FRM01, przeznaczone dla różnych potrzeb użytkowników, przy projektowaniu mikrokontroler, z zaprogramowanymi 18 funkcjami,
Moduł przekaźnika czasowego FRM01 Instrukcja obsługi Przekaźnik wielofunkcyjny FRM01, przeznaczone dla różnych potrzeb użytkowników, przy projektowaniu mikrokontroler, z zaprogramowanymi 18 funkcjami,
Falownik MOTOVARIO EM16. Skrócona instrukcja obsługi
 Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Interfejs RS485-TTL KOD: INTR. v.1.0. Zastępuje wydanie: 2 z dnia 19.12.2012
 Interfejs RS485-TTL v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Rozmieszczenie elementów.... 3 3. Przyłączenie do magistrali RS485....
Interfejs RS485-TTL v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Rozmieszczenie elementów.... 3 3. Przyłączenie do magistrali RS485....
Kod produktu: MP-1W-2480
 Kod produktu: MODUŁ INTERFEJSU -WIRE, CHIPSET DS480B zbudowane jest na bazie kontrolera DS480B firmy Dallas-Maxim (konwerter RS3 - Wire). posiada układ zawierający unikalny numer seryjny (DS40), wykorzystywany
Kod produktu: MODUŁ INTERFEJSU -WIRE, CHIPSET DS480B zbudowane jest na bazie kontrolera DS480B firmy Dallas-Maxim (konwerter RS3 - Wire). posiada układ zawierający unikalny numer seryjny (DS40), wykorzystywany
PX342. Driver PWM 1x10A INSTRUKCJA OBSŁUGI
 PX342 Driver PWM 1xA INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 3 2. Warunki bezpieczeństwa... 3 3. Opis złączy i elementów sterowania... 4 4. Funkcja smooth... 4 5. Ustawianie adresu DMX... 5
PX342 Driver PWM 1xA INSTRUKCJA OBSŁUGI R SPIS TREŚCI 1. Opis ogólny... 3 2. Warunki bezpieczeństwa... 3 3. Opis złączy i elementów sterowania... 4 4. Funkcja smooth... 4 5. Ustawianie adresu DMX... 5
Podstawy inżynierii sterowania Ćwiczenia laboratoryjne
 Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium nr 4: Układ sterowania silnika obcowzbudnego prądu stałego z regulatorem PID 1. Wprowadzenie Przedmiotem rozważań jest układ automatycznej
Podstawy inżynierii sterowania Ćwiczenia laboratoryjne Laboratorium nr 4: Układ sterowania silnika obcowzbudnego prądu stałego z regulatorem PID 1. Wprowadzenie Przedmiotem rozważań jest układ automatycznej
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
INSTRUKCJA OBSŁUGI REGULATOR PWM GRZAŁKI ZASILANEJ Z PANELI SŁONECZNYCH.
 INSTRUKCJA OBSŁUGI REGULATOR PWM GRZAŁKI ZASILANEJ Z PANELI SŁONECZNYCH. 1. UWAGI DOTYCZĄCE BEZPIECZEŃSTWA - Przed pierwszym uruchomieniem należy zapoznać się z niniejszą instrukcją obsługi. - Wszelkich
INSTRUKCJA OBSŁUGI REGULATOR PWM GRZAŁKI ZASILANEJ Z PANELI SŁONECZNYCH. 1. UWAGI DOTYCZĄCE BEZPIECZEŃSTWA - Przed pierwszym uruchomieniem należy zapoznać się z niniejszą instrukcją obsługi. - Wszelkich
Kod produktu: MP-BTM222-5V
 Moduł interfejsu Bluetooth na bazie BTM-222, sterowany komendami AT, poziom napięć TTL 5V Urządzenie zbudowano w oparciu o moduł transmisyjny Bluetooth typu BTM-222 firmy Rayson, umożliwiający zasięg bezprzewodowy
Moduł interfejsu Bluetooth na bazie BTM-222, sterowany komendami AT, poziom napięć TTL 5V Urządzenie zbudowano w oparciu o moduł transmisyjny Bluetooth typu BTM-222 firmy Rayson, umożliwiający zasięg bezprzewodowy
Regulacja prędkości posuwu belki na prowadnicach pionowych przy wykorzystaniu sterownika Versa Max
 Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
3Motion - wieloosiowy sterownik ruchu Część 1. Informacje ogólne i hardware
 - wieloosiowy sterownik ruchu Część 1 Informacje ogólne i hardware to wieloosiowy programowalny sterownik ruchu z interpolacją liniową, kołową i obsługą G-kodów Profil ruchu osi: S-rampa prędkość przyspieszenie
- wieloosiowy sterownik ruchu Część 1 Informacje ogólne i hardware to wieloosiowy programowalny sterownik ruchu z interpolacją liniową, kołową i obsługą G-kodów Profil ruchu osi: S-rampa prędkość przyspieszenie
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT,
 Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
Instrukcja obsługi Poczwórny sterownik silników krokowych SQCA244 Bipolarny sterownik dla 4 silników krokowych do 4A z wejściem LPT, 4 wejściami optoizolowanymi i dwoma wyjściami przekaźnikowymi. P.P.H.
Regulator napięcia transformatora
 Regulator napięcia transformatora Zastosowanie Regulator RNTr-1 Wykorzystywany jest do stabilizacji napięcia na stacjach elektroenergetycznych lub końcach energetycznych linii przesyłowych. Przeznaczony
Regulator napięcia transformatora Zastosowanie Regulator RNTr-1 Wykorzystywany jest do stabilizacji napięcia na stacjach elektroenergetycznych lub końcach energetycznych linii przesyłowych. Przeznaczony
Licznik energii typu KIZ z zatwierdzeniem typu MID i legalizacją pierwotną. Instrukcja obsługi i instalacji
 Licznik energii typu KIZ z zatwierdzeniem typu MID i legalizacją pierwotną Instrukcja obsługi i instalacji 1 Spis treści: 1. Ważne wskazówki. 2 1.1. Wskazówki bezpieczeństwa....2 1.2. Wskazówki dot. utrzymania
Licznik energii typu KIZ z zatwierdzeniem typu MID i legalizacją pierwotną Instrukcja obsługi i instalacji 1 Spis treści: 1. Ważne wskazówki. 2 1.1. Wskazówki bezpieczeństwa....2 1.2. Wskazówki dot. utrzymania
Mini Modbus 1AI. Moduł rozszerzający 1 wejście analogowe, 1 wyjście cyfrowe. Wyprodukowano dla
 Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Przetworniki pomiarowe obrotu i przesunięcia liniowego
 Numer zamówieniowy: typ kołnierz i otwór pod wał względnie wał 14 = kołnierz synchro z otworem pod wał 12 mm 25 = kołnierz zaciskowy z wałem 12 mm 26 = kołnierz zaciskowy z wałem 12 mm i adapterem mocowanym
Numer zamówieniowy: typ kołnierz i otwór pod wał względnie wał 14 = kołnierz synchro z otworem pod wał 12 mm 25 = kołnierz zaciskowy z wałem 12 mm 26 = kołnierz zaciskowy z wałem 12 mm i adapterem mocowanym
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
NJB1-Y Przekaźnik napięcia jednofazowego Instrukcja obsługi
 0 Przed rozpoczęciem montażu i eksploatacji uważnie przeczytać instrukcję. Norma: IEC 60947-5-1 NJB1-Y Przekaźnik napięcia jednofazowego Instrukcja obsługi 1. Przeznaczenie Przekaźniki utraty i kolejności
0 Przed rozpoczęciem montażu i eksploatacji uważnie przeczytać instrukcję. Norma: IEC 60947-5-1 NJB1-Y Przekaźnik napięcia jednofazowego Instrukcja obsługi 1. Przeznaczenie Przekaźniki utraty i kolejności
Moduł przekaźnika czasowego FRM01 Instrukcja obsługi
 Moduł przekaźnika czasowego FRM01 Instrukcja obsługi Przekaźnik wielofunkcyjny FRM01, przeznaczone dla różnych potrzeb użytkowników, przy projektowaniu mikrokontroler, z zaprogramowanymi 18 funkcjami,
Moduł przekaźnika czasowego FRM01 Instrukcja obsługi Przekaźnik wielofunkcyjny FRM01, przeznaczone dla różnych potrzeb użytkowników, przy projektowaniu mikrokontroler, z zaprogramowanymi 18 funkcjami,
ТТ TECHNIKA TENSOMETRYCZNA
 ТТ TECHNIKA TENSOMETRYCZNA Wzmacniacz pomiarowy AT1-8... 64 АТ1 - wielokanałowy cyfrowy wzmacniacz typu tensometrycznego, przeznaczony do wzmacniania, konwersji na cyfrowy kod i przesyłania sygnałów tensometrów
ТТ TECHNIKA TENSOMETRYCZNA Wzmacniacz pomiarowy AT1-8... 64 АТ1 - wielokanałowy cyfrowy wzmacniacz typu tensometrycznego, przeznaczony do wzmacniania, konwersji na cyfrowy kod i przesyłania sygnałów tensometrów
Przetwornice częstotliwości
 ZESTAWIENIE SKRÓCONE Przetwornice częstotliwości EFC 3610 to efektywne energetycznie rozwiązanie dla większości segmentów przemysłu: EFC 3610 Pompy, sprężarki Wentylatory, wywietrzniki Maszyny do obróbki
ZESTAWIENIE SKRÓCONE Przetwornice częstotliwości EFC 3610 to efektywne energetycznie rozwiązanie dla większości segmentów przemysłu: EFC 3610 Pompy, sprężarki Wentylatory, wywietrzniki Maszyny do obróbki
Generator przebiegów pomiarowych Ex-GPP2
 Generator przebiegów pomiarowych Ex-GPP2 Przeznaczenie Generator przebiegów pomiarowych GPP2 jest programowalnym sześciokanałowym generatorem napięć i prądów, przeznaczonym do celów pomiarowych i diagnostycznych.
Generator przebiegów pomiarowych Ex-GPP2 Przeznaczenie Generator przebiegów pomiarowych GPP2 jest programowalnym sześciokanałowym generatorem napięć i prądów, przeznaczonym do celów pomiarowych i diagnostycznych.
Liniowe układy scalone w technice cyfrowej
 Liniowe układy scalone w technice cyfrowej Wykład 6 Zastosowania wzmacniaczy operacyjnych: konwertery prąd-napięcie i napięcie-prąd, źródła prądowe i napięciowe, przesuwnik fazowy Konwerter prąd-napięcie
Liniowe układy scalone w technice cyfrowej Wykład 6 Zastosowania wzmacniaczy operacyjnych: konwertery prąd-napięcie i napięcie-prąd, źródła prądowe i napięciowe, przesuwnik fazowy Konwerter prąd-napięcie
ALNET USB - RS Konwerter USB RS 232/422/485 Instrukcja obsługi
 ALNET USB - RS Konwerter USB RS 232/422/485 Instrukcja obsługi AN-ALNET USB - RS-1-v_1 Data aktualizacji: 03/2012r. 03/2012 ALNET USB RS 1-v_1 1 Spis treści 1. Przeznaczenie... 3 2. Parametry urządzenia...
ALNET USB - RS Konwerter USB RS 232/422/485 Instrukcja obsługi AN-ALNET USB - RS-1-v_1 Data aktualizacji: 03/2012r. 03/2012 ALNET USB RS 1-v_1 1 Spis treści 1. Przeznaczenie... 3 2. Parametry urządzenia...
Firma DAGON Leszno ul. Jackowskiego 24 tel Produkt serii DAGON Lighting
 Firma DAGON 64-100 Leszno ul. Jackowskiego 24 tel. 664-092-493 dagon@iadagon.pl www.iadagon.pl www.dagonlighting.pl Produkt serii DAGON Lighting SPM-24 STEROWNIK DMX-512 24 OUT DC / PWM INSTRUKCJA OBSŁUGI
Firma DAGON 64-100 Leszno ul. Jackowskiego 24 tel. 664-092-493 dagon@iadagon.pl www.iadagon.pl www.dagonlighting.pl Produkt serii DAGON Lighting SPM-24 STEROWNIK DMX-512 24 OUT DC / PWM INSTRUKCJA OBSŁUGI
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
REGULATORY TRÓJFAZOWE PRĘDKOŚCI OBROTOWEJ Z SERII FCS FIRMYY CAREL
 REGULATORY TRÓJFAZOWE PRĘDKOŚCI OBROTOWEJ Z SERII FCS FIRMYY CAREL Charakterystyka Regulatory z serii FCS wyposażone są w trójfazową elektroniczną napięciową regulację działającą na zasadzie obcinania
REGULATORY TRÓJFAZOWE PRĘDKOŚCI OBROTOWEJ Z SERII FCS FIRMYY CAREL Charakterystyka Regulatory z serii FCS wyposażone są w trójfazową elektroniczną napięciową regulację działającą na zasadzie obcinania
Konfiguracja parametrów sondy cyfrowo analogowej typu CS-26/RS/U
 Konfiguracja parametrów sondy cyfrowo analogowej typu CS-26/RS/U Ostrów Wielkopolski, 25.02.2011 1 Sonda typu CS-26/RS/U posiada wyjście analogowe napięciowe (0...10V, lub 0...5V, lub 0...4,5V, lub 0...2,5V)
Konfiguracja parametrów sondy cyfrowo analogowej typu CS-26/RS/U Ostrów Wielkopolski, 25.02.2011 1 Sonda typu CS-26/RS/U posiada wyjście analogowe napięciowe (0...10V, lub 0...5V, lub 0...4,5V, lub 0...2,5V)
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Instrukcja Obsługi. Motion. Sp. z o.o. wer r.
 Instrukcja Obsługi Motion wer. 1.2 2016 r. Sp. z o.o. Zalecenia bezpieczeństwa Przeczytaj tę instrukcję bardzo uważnie zanim zaczniesz podłączać i używać urządzenie. Zatrzymaj instrukcję obsługi do przyszłego
Instrukcja Obsługi Motion wer. 1.2 2016 r. Sp. z o.o. Zalecenia bezpieczeństwa Przeczytaj tę instrukcję bardzo uważnie zanim zaczniesz podłączać i używać urządzenie. Zatrzymaj instrukcję obsługi do przyszłego
Falowniki Wektorowe Rexroth Fv Parametryzacja
 Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
6.4 WZMACNIACZE ASTOR GE INTELLIGENT PLATFORMS - SERWONAPĘDY VERSAMOTION
 6.4 WZMACNIACZE Wzmacniacz naleŝy dobrać tak, aby był kompatybilny pod względem mocy, ze sterowanym przez niego silnikiem. Numery katalogowe wzmacniaczy Nr katalogowy Moc Zasilanie IC800VMA012 100 W 1-fazowe
6.4 WZMACNIACZE Wzmacniacz naleŝy dobrać tak, aby był kompatybilny pod względem mocy, ze sterowanym przez niego silnikiem. Numery katalogowe wzmacniaczy Nr katalogowy Moc Zasilanie IC800VMA012 100 W 1-fazowe
ASTOR IC200ALG320 4 wyjścia analogowe prądowe. Rozdzielczość 12 bitów. Kod: B8. 4-kanałowy moduł ALG320 przetwarza sygnały cyfrowe o rozdzielczości 12
 2.11 MODUŁY WYJŚĆ ANALOGOWYCH IC200ALG320 4 wyjścia analogowe prądowe, rozdzielczość 12 bitów IC200ALG321 4 wyjścia analogowe napięciowe (0 10 VDC), rozdzielczość 12 bitów IC200ALG322 4 wyjścia analogowe
2.11 MODUŁY WYJŚĆ ANALOGOWYCH IC200ALG320 4 wyjścia analogowe prądowe, rozdzielczość 12 bitów IC200ALG321 4 wyjścia analogowe napięciowe (0 10 VDC), rozdzielczość 12 bitów IC200ALG322 4 wyjścia analogowe
Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/
 http://www.basecamelectronics.com/") Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/ Basecam simplebgc przewodnik konfiguracji regulatora https://play.google.com/store/apps/details?id=ru.smartsoft.simplebgc
Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/ Basecam simplebgc przewodnik konfiguracji regulatora https://play.google.com/store/apps/details?id=ru.smartsoft.simplebgc
DC-01 Obsługa i konfiguracja sterownika.
 DC-0 Obsługa i konfiguracja sterownika. Zasada działania sterownika Sterowanie zaworem w oparciu o T. Nastawa S. Kolumna T Zawór Uwaga! Opisywany kontroler DC-0 nie może być traktowany jako urządzenie
DC-0 Obsługa i konfiguracja sterownika. Zasada działania sterownika Sterowanie zaworem w oparciu o T. Nastawa S. Kolumna T Zawór Uwaga! Opisywany kontroler DC-0 nie może być traktowany jako urządzenie
Ćwicz. 10 Sensory i elementy wykonawcze automatyki SiEWA/SK SILNIK KROKOWY. W ramach ćwiczenia bada się własności czterofazowego silnika krokowego.
 Temat ćwiczenia: SILNIK KROKOWY 1. Wprowadzenie W ramach ćwiczenia bada się własności czterofazowego silnika krokowego. Ogólna charakterystyka silnika krokowego Powszechność stosowania techniki impulsowej
Temat ćwiczenia: SILNIK KROKOWY 1. Wprowadzenie W ramach ćwiczenia bada się własności czterofazowego silnika krokowego. Ogólna charakterystyka silnika krokowego Powszechność stosowania techniki impulsowej
DEKODER DDC. 1). Adres lokomotywy. - Adres krótki i długi. CV1 Do 127
. Adres lokomotywy. - Adres krótki i długi. CV1 Do 127") DEKODER DDC Dekoder jazdy DJ1 v.10 Standard NMRA kompensacja obciążenia maksymalne napięcie wejściowe 24V prąd silnika 1 A (chwilowy 1,5 A) trzy wyjścia funkcyjne, każde do 200 ma wtyk z kablami NEM 652
DEKODER DDC Dekoder jazdy DJ1 v.10 Standard NMRA kompensacja obciążenia maksymalne napięcie wejściowe 24V prąd silnika 1 A (chwilowy 1,5 A) trzy wyjścia funkcyjne, każde do 200 ma wtyk z kablami NEM 652
Kod produktu: MP01611-ZK
 ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
MiniModbus 4DI. Moduł rozszerzający 4 wejścia cyfrowe. Wyprodukowano dla
 Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0
 INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0 Opis ogólny: Sterownik inkubatora został zaprojektowany, tak aby spełnić potrzeby najbardziej wymagających procesów inkubacji. Urządzenie zostało
INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0 Opis ogólny: Sterownik inkubatora został zaprojektowany, tak aby spełnić potrzeby najbardziej wymagających procesów inkubacji. Urządzenie zostało