Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S7-1200
|
|
|
- Ludwika Kowal
- 8 lat temu
- Przeglądów:
Transkrypt
1 SIMATIC S w przykładach SIMATIC S w przykładach Wydanie 1 Egzemplarz bezpłatny Przykłady i Aplikacje

2 Przykład 8 Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S7-1200

3 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Realizowane zadanie 1.1. Środowisko sprzętowe Silnik synchroniczny połączony z napędem serwo SINAMICS S110 ma być pozycjonowany przez moduł komunikacyjny CM1241 (RS485) sterownika S (CPU1241C). Komunikacja pomiędzy sterownikiem a napędem serwo odbywa się przez protokół USS. Nadzór nad układem oraz lokalna wizualizacja są realizowane za pomocą panelu interfejsu użytkownika KTP600 połączonego do sterownika S kablem Ethernetowym. Do konfiguracji programu sterującego oraz HMI używany jest STEP7 Basic v10.5. Konfiguracja napędu serwo odbywa się za pomocą narzędzia STARTER. Rys Układ realizuje następujące scenariusze: jazda w trybie ręcznym jog tryb odniesienia pozycjonowanie absolutne oraz relatywne poruszanie silnika zgodnie ze zdefiniowanymi profilami Aby pozycjonować położenie osi silnika żądana pozycja oraz żądana prędkość, wraz z bitami rozkazów, muszą zostać przesłane za pomocą protokołu USS do SINAMICS S110. SINAMICS S110 po otrzymaniu tych danych niezależnie będzie sterował pozycjonowaniem lub poruszaniem osi silnika. SINAMICS S110 wyśle również do sterownika informację zwrotną. Pozycja, prędkość oraz błędy zostaną zgłoszone za pomocą bitów statusu. 280

4 1. Realizowane zadanie 1.2. Wymagane komponenty Tab Komponenty sprzętowe Lp. Element Liczba MFLB/Nr zamówienia Uwagi 1. Zasilacz PM EP1332-1SH71 2. Moduł komunikacyjny CM ES7241-1CH30-0XB0 (RS485) 3. S CPU1214C 1 6ES7214-1AE30-0XB0 DC/DC/DC 4. Panel KTP600 (kolor, PN) 1 6AV6647-0AD11-3AX0 Opcjonalne 5. Zasilacz PM SL3210-1SB12-3AA0 230V 6. Jednostka sterująca CU305DP 1 6SL3040-0JA00-0AA0 7. Synchroniczny silnik serwo 1FK7 1 1FK7032-5AF21-1UA0 DRIVE-CLiQ 8. SINAMICS S110 MMC wraz oprogramowaniem w wersji 4.3 oraz licencjami 1 6SL3054-4ED00-0AA0 Opcjonalne pod warunkiem, że CU305 ma starsze wersje oprogramowania UWAGA Panel KTP600 nie jest konieczny. Aby symulować interfejs użytkownika wystarczy komputer PC z oprogramowaniem STEP7 Basic. Tab Akcesoria Lp. Element Liczba MFLB/Nr zamówienia Uwagi 9. Kabel zasilający 1 6FX5002-5CG01-1AB0 10. Przewód sygnałowy DRIVE-CLiQ 1 6FX5002-2DC00-1AB0 11. Kabel Profibus 1 6XV1830-0EH Złączka Profibus gniazdo PG 2 6ES7972-0BB12-0XA0 13. Dławik komutacyjny 1 6SE6400-3CC00-4AB3 14. Kable Ethernet do połączenia KTP600, S CPU oraz PC 1 6XV1870-3QH Kabel szeregowy NullModem do podłączenia SINAMICS S110 1 Dostępne w wyspecjalizowanych sklepach 16. Przełącznik krańcowy 2 Dostępne w wyspecjalizowanych sklepach 17. Referencyjny przełącznik krańcowy 1 Dostępne w wyspecjalizowanych sklepach UWAGA Opisana konfiguracja jest projektowana do zastosowań przemysłowych. Zaopatrzenie w energię zazwyczaj odbywa się za pomocą sieci przemysłowych. Nie jest, zatem, konieczne stosowanie specjalnych filtrów/dławików o niskich prądach upływu. Jeżeli konfiguracja jest zasilana z wrażliwej sieci elektrycznej (np. komputery są podłączone do tej samej sieci) powinny być zastosowane filtry lub dławiki. 281

5 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S UWAGA Więcej informacji na temat SINAMICS S110 można znaleźć pod adresem: Tab Pakiety oprogramowania Lp. Element Liczba MFLB/Nr zamówienia Uwagi 18. STEP 7 Basic V ES7822-0AA00-0YA0 19. Narzędzie STARTER na DVD 1 6SL3072-0AA00-0AG0 Dla wersji dla oprogramowania w wersji 4.3 UWAGA Najnowszą wersja oprogramowania STARTER można znaleźć pod adresem: 282

6 2. Realizacja zadania 2. Realizacja zadania 2.1. Schemat połączeń S PM CPU1214C Rys

7 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S PM340 Rys CU305DP Rys

8 2. Realizacja zadania UWAGA Prosimy o stosowanie się do poleceń zawartych w instrukcji oraz do odpowiednich zasad bezpieczeństwa podczas podłączania zasilania AC 230V do SIAN- MICS S110 Aby uniknąć interferencji elektromagnetycznej należy: Upewnić się, że zastosowano dobrze przewodzące połączenie pomiędzy przekształtnikiem częstotliwości a uziemionym metalowym mocowaniem. Upewnić się, że wszystkie urządzenia w pojedynczej obudowie są uziemione za pomocą krótkich przewodów o dużej średnicy. Uziemienie winno być wspólne dla wszystkich tych urządzeń. Upewnić się, że S CM połączony z przekształtnikiem częstotliwości jest podłączony, za pomocą krótkiego przewodu o dużej średnicy, do tego samego uziemienia, co przekształtnik. Używać ekranowanych przewodów sterowania np. kabli PROFIBUS firmy SIEMENS do poprowadzenia magistrali RS485. Należy uziemić ekranowanie po stronie przekształtników przy użyciu złącz ekranowania. Przewody sterujące powinny być montowane oddzielnie od przewodów zasilających (jeżeli to możliwe nie powinny być zachowana znaczna odległość między nimi). Kable zasilające i sterujące powinny przecinać się pod kątem 90. Podłączyć przewód osłonowy silników do złącz uziemienia (PE) odpowiedniego przekształtnika częstotliwości. Upewnić się, że przewody są zakończone w odpowiedni sposób oraz, że połączenia nieekranowane są tek krótkie jak to możliwe. Należy używać przewodów ekranowanych do połączeń silników. Ekranowania powinny być uziemione zarówno po stronie przekształtnika jak i silnika przy pomocy zacisków. 285

9 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Nadawanie adresów napędom oraz terminowanie magistrali RS485 Magistrala RS485 umożliwia transmisję danych przy pomocy protokołu USS dwuprzewodowym połączeniem pomiędzy urządzeniem nadrzędnym (np. CPU 1214C) a maksymalnie szesnastoma (na każdy moduł komunikacyjny) urządzeniami podrzędnymi (np. SINAMICS G110). Konieczne jest nadanie każdemu z urządzeń podrzędnych niepowtarzalnego adresu z zakresu od 1 do 16. Protokół USS umożliwia użycie tylko jednego urządzenia nadrzędnego, które nie wymaga przypisania adresu. Aby uniknąć odbić na końcach magistrali, które mogłyby spowodować zafałszowanie sygnału, magistrala musi być zakończona rezystorami jak pokazano na rysunku 2.4. Rys W omawianym przypadku osiągnięto to na obu końcach przez ustawienie przełącznika na złączu PROFIBUS w odpowiedniej pozycji (rysunek 2.5). Rys

10 2. Realizacja zadania 2.3. Struktura protokołu USS Protokół USS został opracowany w celu umożliwienia wymiany danych pomiędzy sterownikiem głównym a węzłami magistrali RS485 (w tym przykładzie napędami). Każdemu napędowi jest przyporządkowany niepowtarzalny adres. Pomimo, że PROFIBUS również używa technologii RS485, pomiędzy USS a PROFIBUS istnieją znaczące różnice. Telegram USS składa się z następujących bloków (rysunek 2.6): STX: początek, LGE: określenie długości telegramu, ADR: adres urządzenia podrzędnego, PKW: wartość parametru, PZD: dane operacyjne, BCC: blok kontrolny. Rys Blok PZD przesyła polecenia oraz zadane ustawienia do napędu. Odpowiedź napędu zawiera informacje o jego stanie i aktualnych wartościach parametrów. Domyślnie pierwsze słowo PZD jest poleceniem sterowania lub informacją o statusie. Drugie słowo zawiera zadane ustawienie lub aktualną wartość. Pozostałe 6 słów (12 bajtów) pozostaje wolne. Zatem całkowita długość PZD może wynosić 2, 4, 6 lub 8 słów. Długość PZD napędu musi odpowiadać długości PZD sterownika. Blok PKW służy do odczytu lub zapisu wartości parametrów w napędzie. Umożliwia on zapis lub odczyt danych w czasie działania urządzenia. PKW składa się z następujących części: PKE: identyfikacja parametru, IND: indeks parametru, PWE: wartość parametru. PKE oraz IND mają po 1 słowie długości. Długość PWE może wynosić 1 lub 2 słowa zależnie od tego, jakiego typu dane są transmitowane (word, double word, real). Całkowita długość PKW jest konfigurowalna dla większości napędów a musi być ustawiona na 4 słowa by poprawnie komunikować się z S zatem, w tym przypadku PWE ma 2 słowa. 287

11 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Wskazówka UWAGA Więcej informacji o protokole USS można uzyskać pod adresem: Komunikacja z napędem Sterownik S komunikuje się z napędem poprzez moduł komunikacyjny przy pomocy biblioteki STEP7 Basic, która jest dostarczana razem z nim. Komunikacja za pomocą USS_PORT Aby polecenie zostało wysłane ze sterownika do napędu, potrzebna jest instrukcja nadzorująca komunikację przez moduł komunikacyjny PtP pomiędzy CPU a napędem. Instrukcją tą jest blok USS_PORT (rysunek 2.7). Rys Parametr PORT określa moduł komunikacyjny, przez który połączone są napędy. Z każdym modułem można połączyć maksymalnie 16 napędów. Jako, że S daje możliwość użycia do 3 modułów komunikacyjnych otrzymujemy możliwość sterowania maksymalnie 48 napędami zgrupowanymi w 3 sieci. Przy każdym wywołaniu bloku następuje przetwarzanie komunikacji z napędem. Komunikacja ta jest asynchroniczna znaczy to, że sterownik S odbywa kilka cykli nim wymiana danych dobiegnie końca. Dlatego właśnie blok USS_PORT jest zwykle wywoływany przez OB obsługi przerwania od opóźnienia ze zdefiniowanym interwałem czasowym. Interwał wywołania zależy od czasu, który jest potrzebny na ukończenie komunikacji z napędem. Blok ten może być również wywoływany cyklicznie jednakże taki sposób wywołania nie podnosi wydajności komunikacji. Wywołanie w czasie, gdy blok wciąż jest aktywny jest ignorowane. W wypadku, gdy długość cyklu jest duża interwał między wywołaniami wzrasta, co może skutkować nieskuteczną komunikacją. 288

12 2. Realizacja zadania Rys Szybkości komunikacji (liczba bodów) determinuje wielkość Worst Case Message Time (WCMT) dla transakcji, to jest czas, jaki zajmie ukończenie transakcji w najgorszym wypadku (patrz tabela 2.1). WCMT jest obliczane na podstawie długości wiadomości wysyłanej, odbieranej oraz odpowiednich czasów oczekiwania (patrz rys. 2.9). Poniżej znajduje się dokładna lista składowych: interwał początkowy jest czasem, który musi upłynąć nim urządzenie nadrzędne może wysłać żądanie (wzór: (2 11)/(prędkość komunikacji w bodach)), żądanie od urządzenia nadrzędnego, maksymalne opóźnienie odpowiedzi (20 ms), odpowiedź od urządzenia podrzędnego. Rys Domyślnie biblioteka protokołu USS podejmuje do dwóch prób ukończenia dla każdej transakcji. Skutkuje to minimalnym interwałem wywołania dla USS_PORT danym wzorem: Minimalny interwał wywołania instrukcji USS_PORT [ms] = 2 WCMT 289
/(prędkość komunikacji w bodach)),")
13 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Ponadto trzeba się upewnić, że blok USS_PORT zostanie wywołany przed upływem limitu czasu napędu. Limit czasu napędu jest to trzykrotnej próby powtórzenia transakcji w wypadku wystąpienia błędu. Następujący wzór określa limit czasu napędu: Limit czasu napędu (na każdy napęd) [ms] = 3 powtórzenia minimalny interwał wywołania USS_PORT W przypadku gdy w sieci jest obecnych więcej niż jeden napęd, limit czasu pojedynczego napędu musi być pomnożony przez ilość napędów. Wtedy otrzymujemy: Limit czasu napędu (na każdy napęd) [ms] = (3 powtórzenia minimalny interwał wywołania USS_PORT) liczba napędów w sieci Prędkość komunikacji [bod] WCMT [ms] Minimalny interwał wywołania USS_ PORT [ms] Limit czasu napędu [ms] Przykładowe obliczenie: W sieci znajdują się 2 napędy. Prędkość komunikacji wynosi bodów. minimalny interwał wywołania USS_PORT = (2 28,02 ms) = 37 ms Limit czasu napędu = ms = 222 ms Wynik: opóźnienie przerwania OB, w którym blok USS_PORT jest wywoływany powinno wynosić przynajmniej 37 ms. monitorowanie komunikacji na napędzie powinno być skonfigurowane na przynajmniej 222 ms, lepiej gdyby było to 230 ms. Przesyłanie i odczyt danych procesowych z napędów za pomocą USS_DRV Blok USS_DRV wymienia dane z napędami poprzez tworzenie żądań oraz przetwarzanie odpowiedzi. Blok danych typu instance jest używany, jako magazyn danych. Dla każdego napędu trzeba użyć osobnego bloku USS_DRV. Jeden blok danych może być współdzielony przez maksymalnie 16 bloków USS_DRV. W momencie wstawienia pierwszego bloku USS_DRV w edytorze STEP7 Basic blok danych typu instance jest tworzony automatycznie. Ten sam blok danych typu instance musi być określony przy tworzeniu pozostałych bloków USS_ DRV. 290
 [ms] = 3 powtórzenia minimalny interwał wywołania USS_PORT W przypadku gdy w sieci jest obecnych więcej niż jeden")
14 2. Realizacja zadania Rys Wywołania bloku USS_DRV muszą następować cyklicznie. W momencie pierwszego wywołania bloku napęd wskazany przez parametr Drive jest inicjalizowany w bloku danych typu instance, co umożliwia komunikację z napędem. Dlatego ważne jest by blok USSS_DRV był wywołany co najmniej raz dla każdego napędu. Jeżeli podczas działania numer napędu ulega zmianie przede wszystkim należy ponownie inicjalizować blok danych typu instance za pomocą ustawienia sterownika na STOP a potem znów na RUN. Za pomocą parametrów po lewej stronie bloku USS_DRV można, dla przyporządkowanego napędu, zadać słowo kontrolne (RUN, OFF2, OFF3, F_ACK, DIR) oraz wymaganą wartość prędkości (SPEED_SP). CTRL3-CTRL8 są konfigurowalnymi przez użytkownika słowami wysyłanej wiadomości, przechowywane są one w buforze wysyłkowym bloku danych typu instance. Słowa określające stan (STATUS1) oraz aktualną wartość (SPEED) danego napędu są odczytywane z poprawnego buforu odpowiedzi oraz udostępniane na wyjściach bloku USS_DRV. STATUS3-STATUS8 są konfigurowalnymi przez użytkownika słowami odpowiedzi. Poszczególne bity RUN_EN, D_DIR, INHIBIT, oraz FAULT są zawarte w pierwszym słowie określającym stan. Podczas wykonania USS_DRV nie ma miejsca transmisja danych. Komunikacja z napędami ma miejsce jedynie po wykonaniu USS_PORT. USS_DRV konfiguruje jedynie wiadomość do wysłania oraz odczytuje dane uprzednio odebrane przez USS_PORT (patrz rysunek 2.11). 291

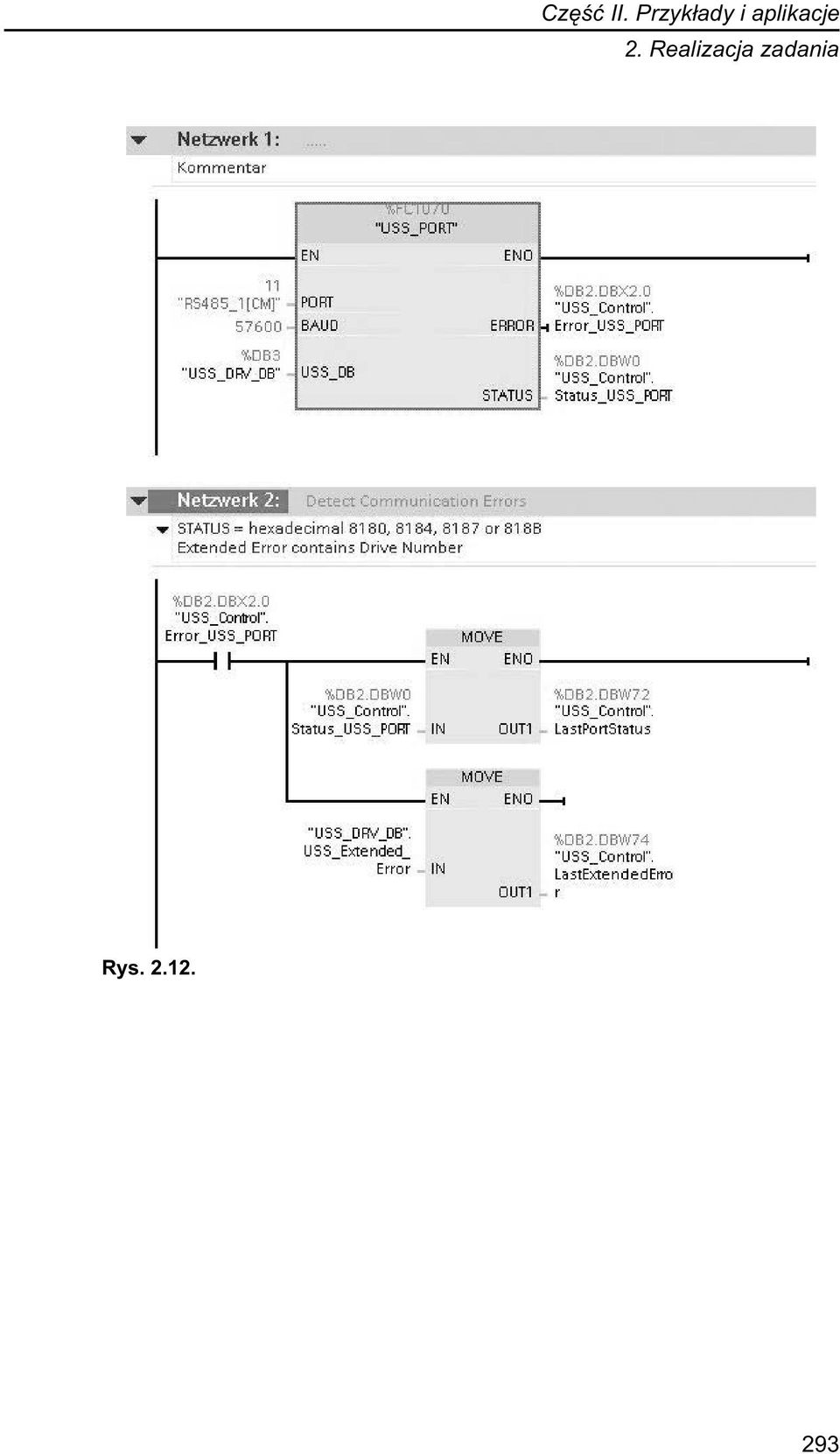
15 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Rys Przetwarzanie błędów komunikacji Błędy komunikacji są dostępne jedynie na wyjściu bloku USS_PORT. Nie są dostępne w USS_DRV. Mogą one mieć następujące wartości szesnastkowe 0x8180, 0x8184, 0x8187, 0x818B. Aby stwierdzić, który napęd wysłał kod błędu należy sprawdzić wartość USS_ Extended_Error w bloku danych typu instance. W wypadku wystąpienia błędu komunikacji adres napędu przechowywany jest w tej zmiennej. Jako, że wiadomość o stanie jest dostępna na wyjściu USS_PORT jedynie przez okres jednego cyklu, więc w wypadku wystąpienia błędu musi ona być przechowywana w innym miejscu (patrz rysunek 2.12). Przegląd wiadomości o stanie można odnaleźć w dokumencie S System Manual. 292

16 2. Realizacja zadania Rys
17 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Użytkowanie i konfiguracja dostępnych słów sterujących oraz słów stanu SINAMICS S110 oferuje moduł funkcji Basic positioner (EPOS). Przy pomocy EPOS można zrealizować wszystkie zadania, jakie stawia omawiany przykład konfiguracji. Aby sterować funkcją EPOS pracy pomocy S potrzebne są różnorodne sygnały sterowania oraz statusu przesyłane do napędu lub przez niego otrzymywane przy pomocy protokołu USS. Napęd jest skonfigurowany w taki sposób, że pełna funkcjonalność EPOS może być osiągnięta przy przesłaniu minimalnej ilości słów. W rezultacie istnieje 8 słów, których konfiguracja w bloku USS_DRV została opisana poniżej. UWAGA Przed przystąpieniem do konfiguracji bloku USS_DRV zalecamy zapoznanie się z informacjami na temat funkcji Basic Positioner (Sinamics S110 Function Manual, rozdział 7.3.6). Konfiguracja bloku USS_DRV dla 8 słów PZD Zazwyczaj aplikacje, w których występuje sterowanie prędkością obsługiwane są za pomocą 2 słów PZD. Blok USS_DRV jest zaprojektowany z myślą o takich zastosowaniach. Aby wykorzystać pozostałe słowa PZD należy użyć wyjść CTRL3 CTRL8 oraz STATUS3 STATUS8. Długość użytych słów PZD jest określona na wejściu PZD_LEN i może przyjmować wartości 2, 4, 6 oraz 8. Rozszerzenie wyjścia/wejścia wymaga użycia 16-bitowego systemu zmiennych. Jednakże większość przesyłanych danych to pojedyncze bity lub zmienne 32- -bitowe (liczby zmiennoprzecinkowe, podwójne słowa). Z tego powodu konieczne jest umieszczanie poszczególnych bitów w bloku danych oraz określenie ich przy pomocy adresowania bezwzględnego w bloku USS_DRV. Warto wziąć pod uwagę fakt, że bity mniej znaczące 0-7 zlokalizowane są w prawej części słowa, natomiast bity 8-15 w lewej. Aby móc adresować dane w bloku danych bezwzględnie musi być on zadeklarowany jako non-symbolic. Na rysunku 2.13 pokazano tę sytuację. 294

18 2. Realizacja zadania Rys Niesymboliczny blok danych Wartości 32-bitowe danych typu zmiennoprzecinkowego lub podwójnego słowa muszą być przetwarzane w sposób, który pozwoli podzielić zmienną na dwa kolejne słowa i później operować jedynie częściami niższego i wyższego rzędu osobno. Jest to jedyna metoda, która zagwarantuje poprawną konfigurację zmiennych w napędzie. UWAGA W celu przetwarzania słów PZD w programie sterującym zostały stworzone bloki funkcji. Są one sklasyfikowane w grupie USS_Helpers. Przegląd sygnałów sterujących Sygnały sterujące są to sygnały wysyłane ze sterownika do napędów. Przyporządkowanie poszczególnych słów PZD przedstawiono w tabeli 2.2. Tab PZD Przyporządkowana zawartość PZD1 Słowo sterujące 1 PZD2 Zmiana prędkości (żądana wartość) % (0x4000 = 100%) PZD3 Słowo sterujące 3 PZD4 Słowo sterujące 2 PZD5 Żądana pozycja [Jednostka długości LU, np. mm] na potrzeby PZD6 pozycjonowania absolutnego/względnego PZD7 Żądane przyspieszenie % PZD8 Żądane opóźnienie % 295

19 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Przydział bitów w pierwszym słowie sterowania PZD1 pokazano w tabeli 2.3. Tab Bit Nazwa Znaczenie 0 RUN (OFF1) ON polecenie 0 = aktywowane OFF1 1 = ON OFF2 oraz OFF3 muszą być ustawione na 1 zanim polecenie ON może być ustawione. 1 OFF2 OFF2 polecenie 0 = aktywowane OFF2 1 = wolne koło nie jest aktywowane 2 OFF3 OFF3 polecenie 0 = aktywowane OFF3 1 = bez gwałtownego zatrzymania 3 ENC Uruchom działanie (automatycznie zadane) 4 Nieprzypisany 5 Nieprzypisany 6 Nieprzypisany 7 F_ACK (ACK_Error) Potwierdzanie błędu 8 Nieprzypisany 9 Nieprzypisany 10 LB Bit życia (PLC żąda sterowania) 11 Nieprzypisany 12 Nieprzypisany 13 Nieprzypisany 14 Nieprzypisany 15 Nieprzypisany 296
 Potwierdzanie błędu 8 Nieprzypisany 9 Nieprzypisany 10 LB Bit życia (PLC żąda sterowania) 11 Nieprzypisany 12 Nieprzypisany 13")
20 2. Realizacja zadania Przydział bitów w drugim słowie sterowania PZD4 pokazano w tabeli 2.4. Tab Bit Nazwa Znaczenie 0 RefStart Rozpocznij tryb odniesienia 1 RefPSet Ustal punkt odniesienia 2 RefTyp Wybór trybu odniesienia 0 = za pomocą punktu odniesienia 1 = tryb odniesienia w locie 3 RefStDi Punkt odniesienia, kierunek początkowy 0 = dodatni kierunek początkowy 1 = ujemny kierunek początkowy 4 Nieprzypisany 5 Nieprzypisany 6 Nieprzypisany 7 Nieprzypisany 8 MdiStart 9 MdiSetup 10 MdiPsTy 11 MdiPosDir 12 MdiNegDir 13 MdiEdge 14 MdiTrTyp 15 Nieprzypisany Rozpocznij tryb MDI / rozpocznij bezpośrednie określanie żądanej wartości MDI Wybór ustawienia trybu MDI 0 = pozycjonowanie 1 = nastawianie MDI typ pozycjonowania 0 = pozycjonowanie względne 1 = pozycjonowanie absolutne MDI wybór kierunku dla nastawiania lub Pozycjonowanie absolutne osi polarowych w kierunku dodatnim MDI wybór kierunku dla nastawiania lub absolutnego pozycjonowania osi polarowych w kierunku ujemnym MDI transfer wartości żądanej po zboczu wznoszącym, jeżeli MdiTrTyp = 0 MDI rodzaj transferu wartości żądanej 0 = transfer wartości po zboczu wznoszącym na MdiEdge 1 = stały transfer 297

21 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Przydzielenie bitów w trzecim słowie sterowania PZD3 pokazano w tabeli 2.5. Tab Bit Nazwa Znaczenie 0 TrvStart TRV aktywuj zadanie trawersowania (po zboczu wznoszącym) 1 TrvBit0 TRV bit wyboru bloku 0 2 TrvBit1 TRV bit wyboru bloku 1 3 TrvBit2 TRV bit wyboru bloku 2 4 TrvBit3 TRV bit wyboru bloku 3 5 TrvBit4 TRV bit wyboru bloku 4 6 TrvBit5 TRV bit wyboru bloku 5 7 IntMStp TRV/MDI zatrzymanie pośrednie 0 = przejazd przerwany / oś zwalnia zgodnie ze 100% ustawieniem opóźnienia 1 = bez pośredniego zatrzymania (oś może być poruszana) 8 RejTask TRV/MDI odrzuć zadanie przejazdu 0 = przejazd przerwany / oś zwalnia zgodnie ze 100% ustawieniem opóźnienia 1 = nie orzucaj zadania przejazdu (oś może być poruszana) 9 Jog1 Przejazd w trybie ręcznym na przód 10 Jog2 Przejazd w trybie ręcznym do tyłu 11 Nieprzypisany 12 JogInc Tryb ręczny 0 = ruch ciągły 1 = przejazd według zadanego profilu 13 SftLimAct Aktywacja programowego przełącznika krańcowych 14 StpCamAct Aktywacja sprzętowych przełączników krańcowych 15 Nieprzypisany Przegląd sygnałów stanu Sygnały stanu są to sygnały przesyłane z napędu do sterownika. Przyporządkowanie poszczególnych słów PZD pokazano w tabeli 2.6. Tab PZD Przyporządkowana zawartość PZD1 Słowo stanu 1 PZD2 Rzeczywista prędkość 0-100% (0x4000 = 100%) maksymalnej prędkości PZD3 Słowo stanu 3 PZD4 Słowo stanu 2 PZD5 PZD6 Rzeczywista pozycja w [jednostka długości LU, np. mm] PZD7 Rzeczywista prędkość [obroty na minutę] PZD8 Obecny kod błędu 298
22 2. Realizacja zadania Przydział bitów w pierwszym słowie stanu PZD1 pokazano w tabeli 2.7. Tab Bit Nazwa Znaczenie 0 RTS Gotów do startu 1 RDY Gotów do działania 2 IOP Napęd działa 3 Fault Błąd aktywny 4 OFF2_inactiv OFF2 niewłączone 5 OFF3_inactiv OFF3 niewłączone 6 Inhibit Na wartości powstrzymującej 7 Alarm Alarm aktywny 8 Standstill Rzeczywista prędkość < próg prędkości wartość 3 (wykrywanie blokady) 9 LB_CR Żądanie kontroli bitu życia 10 JogAct Tryb ręczny aktywny 11 RefAct Tryb odnoszenia aktywny 12 TrvBlAct Tryb ruchu przestawczego aktywny 13 MdiPosAct Pozycjonowanie MDI/z bezpośrednio określoną wartością żądaną aktywne 14 MdiSetupAct Nastawianie MDI/z bezpośrednio określoną wartością żądaną aktywne 15 FlyRefAct Tryb odnoszenia w locie aktywny Przydział bitów w drugim słowie stanu PZD4 pokazano w tabeli 2.8. Tab Bit Nazwa Znaczenie 0 RefDone Punkt odniesienia ustawiony 1 CmdAct Polecenie przejazdu aktywne 2 TargPos Pozycja docelowa osiągnięta 3 NoFlwErr Błąd śledzenia ma wartość tolerowaną 4 SftSwNegAct Zbliżam się do programowego przełącznika krańcowego reverse 5 SftSwPosAct Zbliżam się do programowego przełącznika krańcowego forward 6 StpCamNegAct Zbliżam się do sprzętowego przełącznika krańcowego reverse 7 StpCamPosAct Zbliżam się do sprzętowego przełącznika krańcowego forward 8 AckTrvBl Dla trybów przejściowego lub MDI/bezpośredniego określenia wartości żądanej z transferem wartości żądanej po zboczu wznoszącym (MdiTrTyp = 0) bit ten używany jest do zawiadamiania bloku przejściowego. 9 SetPStatic Statyczna wartość żądana 10 Fwd Oś porusza się na przód 11 Rev Oś porusza się do tyłu 12 Accel Oś przyspiesza 13 Decel Oś zwalnia 14 PrntMrkOut Drukuj znak na zewnątrz okna zewnętrznego 15 VelctyLimit Ograniczenie prędkości aktywne 299
23 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Przydział bitów w trzecim słowie stanu PZD3 pokazano w tabeli 2.9. Tab Bit Nazwa Znaczenie 0 AckTrvBit0 Aktywny pit przejścia 0 1 AckTrvBit1 Aktywny pit przejścia 1 2 AckTrvBit2 Aktywny pit przejścia 2 3 AckTrvBit3 Aktywny pit przejścia 3 4 AckTrvBit4 Aktywny pit przejścia 4 5 AckTrvBit5 Aktywny pit przejścia 5 6 TrvOut1 Bezpośrednie wyjście 1 przez blok przejścia 7 TrvOut2 Bezpośrednie wyjście 2 przez blok przejścia 8 Nieprzypisany 9 Nieprzypisany 10 Nieprzypisany 11 Nieprzypisany 12 Nieprzypisany 13 TrckMode Tryb śledzenia aktywny 14 PosSmCam1 Wartość rzeczywista pozycji <= Przełącznik krzywkowy pozycja 1 15 PosSmCam2 Wartość rzeczywista pozycji <= Przełącznik krzywkowy pozycja Funkcjonalności Basic Positioner Tryby działania Na potrzeby omawianego przykładu konfiguracji zostały użyte wszystkie cztery tryby EPOS: tryb ręczny, tryb odniesienia, MDI/bezpośrednie określenie wartości żądanej (pozycjonowanie absolutne/ względne), bloki przejściowe. Trybom w momencie jednoczesnego wyboru przyporządkowano następujące pierwszeństwo: Tryb ręczny > Tryb odniesienia > MDI > bloki przejściowe Jeżeli w czasie działania danego trybu zostanie wybrany inny zostanie wyświetlona wiadomość ostrzegająca. W ramach każdego trybu dostępne są różne funkcje aczkolwiek nie wszystkie zostaną zastosowane w tym przykładzie. Na następnych stronach zostanie, które z funkcji są odpowiednie do tego przykładu, jak je konfigurować oraz jakie dodatkowe parametry zostały użyte. 300
24 2. Realizacja zadania Mechanizm Oś zazwyczaj połączona jest z silnikiem kołem zębatym lub pasem zębatym. Aby określić, o jaki kąt oś się obraca na jeden obrót silnika trzeba określić odpowiedni stosunek obrotów osi do obrotów silnika. W większości przypadków dla osi liniowych wybierana jest normalizacja 1LU = = 1 µm. W takim wypadku wystarczy zastąpić skrót LU przez µm. W tym przykładzie zakłada się obrót osi o LU. Ponadto obrót ten odpowiada jednemu obrotowi silnika. Znaczy to, że pozycja osi zmienia się o LU = = µm = 10 mm na jeden obrót silnika. Rys Ograniczenia dynamiczne oraz mechaniczne Aby uniknąć poruszania osi poza zasięgiem mogą zostać zastosowane programowe oraz sprzętowe przełączniki krańcowe. Programowe przełączniki krańcowe są to pewne wartości pozycji. Kiedy oś jest odnoszona, te pozycje nie mogą być zmienione Przed osiągnięciem jednej z tych pozycji oś jest zatrzymywana z odpowiednim opóźnieniem. Przełączniki sprzętowe są to czujniki lub przełączniki połączone przewodowo. W momencie załączenia jednego z tych przełączników oś zostanie natychmiast zatrzymana. Oba rodzaje przełączników krańcowych są stosowane w tym przykładzie. Przełączniki sprzętowe są używane również, jako punkty zwrotu w trybie namiaru. 301
25 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Rys Maksymalna prędkość, maksymalne przyspieszenie lub opóźnienie również muszą być skonfigurowane. Zależą one zwykle od nominalnej prędkości oraz bezwładności silnika. Prędkość maksymalna w tym przykładzie jest prędkością nominalną silnika. Przyspieszenie oraz opóźnienie maksymalne są tak zadane by sinik szybko osiągał prędkość końcową bez powodowania błędów nadążania przy 100% przyspieszeniu bez podłączonej osi. Rys Uruchamianie napędu Napęd musi być ustawiony w stanie gotowości do startu, aby mógł zostać uruchomiony. Następujące warunki po temu muszą zostać spełnione: nie jest aktywny żaden błąd, OFF2 oraz OFF3 nie są aktywne (TRUE), RUN nie jest aktywny (FALSE). Jedynie w wypadku, kiedy powyższe warunki zostały spełnione napęd można uruchomić poprzez ustawienie wejścia RUN na bloku USS_DRV. 302
26 2. Realizacja zadania Potwierdzanie błędu W wypadku, gdy aktualny jest potwierdzalny błąd należy go wyzerować poprzez ustawienie wejścia F_ACK na bloku USS_DRV. Po tym napęd może zostać znów uruchomiony (po spełnieniu wyżej wspomnianych warunków). Tryb przejazdów ręcznych Tryb ręczny używany jest do powolnego poruszania osi. Dlatego prędkość maksymalna osi może być ograniczona w tym trybie. Żądane wartości prędkości dla przejazdów w przód oraz w tył mogą się różnić. W tym przykładzie osie są poruszane jedynie z 10% prędkości nominalnej przy wartości żądanej 100%. Rys Dwa tryby są dostępne w ramach trybu ręcznego: Tryb ciągły tak długo jak bit kontrolny Jog jest aktywny oś poruszana jest w wybranym kierunku. Tryb przyrostów oś poruszana jest jedynie o zdefiniowany interwał, kiedy bit Jog jest aktywny Tak długo jak oś jest poruszana bit CmdAct jest aktywny. 303
27 Przykład 8. Pozycjonowanie napędu serwo SINAMICS S110 z wykorzystaniem protokołu USS sterownika SIMATIC S Tryb naprowadzania za pomocą punktu odniesienia Napęd musi znać pozycję osi zanim może ją poruszyć w określony sposób. Można to osiągnąć w EPOS na różne sposoby (zobacz w instrukcji). Jako przełącznik punktu odniesienia (punkt zero), w tym przykładzie, użyty jest zewnętrzny czujnik podłączony przez wejście cyfrowe do napędu. Dwa krańcowe przełączniki sprzętowe są stosowane, jako punkty zwrotu w wypadku, gdy nie zostanie odnaleziony punkt odniesienia. Po ustawieniu bitu RefStart oś poruszana jest ze zdefiniowaną prędkością w określonym kierunku aż osiągnie punkt zero. Kiedy wykryty zostanie sygnał punktu następuje zbliżanie do punktu odniesienia ze zdefiniowaną prędkością. W wypadku, gdy nie zostanie wykryty sygnał punktu zero, ale zostanie wykryty sygnał sprzętowego przełącznika krańcowego następuje odwrócenie kierunku przejazdu i poszukiwanie trwa dalej. Wartość przesunięcia punktu odniesienia określa jak daleko znajduje się on od punktu zero. W momencie, kiedy punkt odniesienia został osiągnięty skonfigurowana pozycja tego punktu jest zapisywana jako pozycja rzeczywista. Rys Tak długo jak trwa przejazd bit CMDActive jest aktywny. W momencie, kiedy namiar został ukończony bit RefDone jest ustawiany na TRUE. 304
28 2. Realizacja zadania Bezpośrednie określenie wartości żądanej/mdi pozycjonowanie absolutne oraz względne Ze względu na wykonane naprowadzanie znana jest rzeczywista pozycja osi. W tym momencie pozycje osiągalne mechanicznie mogą być zadane poprzez określenie żądanej pozycji w [mm] oraz żądanej prędkości w [%]. UWAGA Pozycjonowanie względne możliwe jest również w wypadku, gdy oś nie została naprowadzona. Prędkość żądana 100% odpowiada nominalnej prędkości silnika. Wartości przyspieszenia oraz opóźnienia odpowiadają tym z profilu przejściowego. Rys Przed rozpoczęciem zadani MDI bity kontrolne IntMStp oraz RejTask muszą być aktywne. Trzeba również dokonać wyboru pomiędzy pozycjonowaniem względnym oraz absolutnym. Tak długo jak trwa przejazd bit CmdAct jest aktywny. Zadanie przejścia może być odrzucone poprzez ustawienie bitu kontrolnego RejTask. Można również przerwać przejazd przez ustawienie bitu IntMstp i kontynuować później. Również transfer nowej wartości żądanej może być dokonany podczas przejazdu. Bloki przejazdów Po naprowadzeniu osi można za pomocą tego trybu wybrać z pośród 16 bloków przejazdów. Dla każdego z nich prędkość, przyspieszenie oraz opóźnienie mogą zostać indywidualnie zadane. Możliwe zadania są następujące: pozycjonowanie względne/absolutne, ciągłe dodatnie/ujemne przejście, oczekiwanie zadaną ilość czasu, bloki skokowe. równoczesne ustawienie/resetowanie do dwóch wyjść cyfrowych. 305
Współpraca falownika SINAMICS G110 ze sterownikiem S7-1200
 Współpraca falownika SINAMICS AUTOMATYKA G110 ze sterownikiem I MECHATRONIKA S7-1200 Współpraca falownika SINAMICS G110 ze sterownikiem S7-1200 W przykładzie sterownik z rodziny S7-1200 steruje pracą dwóch
Współpraca falownika SINAMICS AUTOMATYKA G110 ze sterownikiem I MECHATRONIKA S7-1200 Współpraca falownika SINAMICS G110 ze sterownikiem S7-1200 W przykładzie sterownik z rodziny S7-1200 steruje pracą dwóch
Ćwiczenia z S7-1200. Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP.
 Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
Przykład 5. Zdecentralizowane sterowanie napędami SINAMICS G110 za pomocą protokołu USS przy wykorzystaniu sterownika SIMATIC S7-1200
 SIMATIC S7-1200 w przykładach SIMATIC S7-1200 w przykładach Wydanie 1 Egzemplarz bezpłatny Przykłady i Aplikacje www.siemens.pl/s7-1200 Przykład 5 Zdecentralizowane sterowanie napędami SINAMICS G110 za
SIMATIC S7-1200 w przykładach SIMATIC S7-1200 w przykładach Wydanie 1 Egzemplarz bezpłatny Przykłady i Aplikacje www.siemens.pl/s7-1200 Przykład 5 Zdecentralizowane sterowanie napędami SINAMICS G110 za
Kurs SINAMICS G120 Konfiguracja i uruchomienie. Spis treści. Dzień 1
 Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Ćwiczenia z S7-1200. S7-1200 jako Profinet-IO Controller. FAQ Marzec 2012
 Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Bit 11 pierwszego słowa komunikacji acyklicznej ustawny jest na wartość 0 i nie podlega modyfikacji.
 1 2 Posługując się komunikacją acykliczną do dyspozycji mamy 4 słowa za pomocą których przesyłamy identyfikację żądania, numer parametru jego indeks oraz wartość. Pierwsze słowo PKE zawiera informację
1 2 Posługując się komunikacją acykliczną do dyspozycji mamy 4 słowa za pomocą których przesyłamy identyfikację żądania, numer parametru jego indeks oraz wartość. Pierwsze słowo PKE zawiera informację
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000
 APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 Autor: Ver: Marcin Ataman 1.0 Spis treści strona 1. Wstęp... 2 2. Pierwsze uruchomienie....
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 Autor: Ver: Marcin Ataman 1.0 Spis treści strona 1. Wstęp... 2 2. Pierwsze uruchomienie....
FAQ: 00000042/PL Data: 3/07/2013 Konfiguracja współpracy programów PC Access i Microsoft Excel ze sterownikiem S7-1200
 Spis treści 1 Opis zagadnienia omawianego w dokumencie.. 2 2 Wstęp do nowego projektu..... 3 2.1 Nowy projekt... 3 2.2 Dodanie nowego urządzenia... 4 3 Program w main... 6 4 Program PC Access.... 8 4.1
Spis treści 1 Opis zagadnienia omawianego w dokumencie.. 2 2 Wstęp do nowego projektu..... 3 2.1 Nowy projekt... 3 2.2 Dodanie nowego urządzenia... 4 3 Program w main... 6 4 Program PC Access.... 8 4.1
Zadania do ćwiczeń laboratoryjnych Systemy rozproszone automatyki - laboratorium
 1. Komunikacja PLC falownik, poprzez sieć Profibus DP Stanowiska A-PLC-5 oraz B-FS-4 1.1. Urządzenia i narzędzia 1.1.1. Sterownik SIMATIC S7-315 2DP (z wbudowanym portem Profibus DP). 1.1.2. Falownik MicroMaster440
1. Komunikacja PLC falownik, poprzez sieć Profibus DP Stanowiska A-PLC-5 oraz B-FS-4 1.1. Urządzenia i narzędzia 1.1.1. Sterownik SIMATIC S7-315 2DP (z wbudowanym portem Profibus DP). 1.1.2. Falownik MicroMaster440
Komunikacja Master-Slave w protokole PROFIBUS DP pomiędzy S7-300/S7-400
 PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników S7 300/S7 400, w celu stworzenia komunikacji Master Slave z wykorzystaniem sieci PROFIBUS DP pomiędzy sterownikami S7 300 i S7
PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników S7 300/S7 400, w celu stworzenia komunikacji Master Slave z wykorzystaniem sieci PROFIBUS DP pomiędzy sterownikami S7 300 i S7
Ćwiczenia z S7-1200. Komunikacja S7-1200 z przyciskowym panelem HMI KP300 PN. FAQ Marzec 2012
 Ćwiczenia z S7-1200 KP300 PN Ćwiczenia z S7-1200 Komunikacja S7-1200 z przyciskowym panelem HMI KP300 PN FAQ Marzec 2012 1 Spis treści 1 Opis zagadnienia poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń...
Ćwiczenia z S7-1200 KP300 PN Ćwiczenia z S7-1200 Komunikacja S7-1200 z przyciskowym panelem HMI KP300 PN FAQ Marzec 2012 1 Spis treści 1 Opis zagadnienia poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń...
Wymagania programowe: STEP 7 STEP 7-Micro/Win
 Sieć MPI pozwala na komunikację w trybie master/slave, gdzie S7-300/S7-400 pracuje w trybie master, natomiast S7-200 w trybie slave. Urządzenia w sieci MPI komunikują się wykorzystując oddzielne logiczne
Sieć MPI pozwala na komunikację w trybie master/slave, gdzie S7-300/S7-400 pracuje w trybie master, natomiast S7-200 w trybie slave. Urządzenia w sieci MPI komunikują się wykorzystując oddzielne logiczne
Dysk CD (z Oprogramowaniem i Podręcznikiem użytkownika)
") Do skonfigurowania urządzenia może posłużyć każda nowoczesna przeglądarka, np. Internet Explorer 6 lub Netscape Navigator 7.0. DP-G310 Bezprzewodowy serwer wydruków AirPlus G 2,4GHz Przed rozpoczęciem
Do skonfigurowania urządzenia może posłużyć każda nowoczesna przeglądarka, np. Internet Explorer 6 lub Netscape Navigator 7.0. DP-G310 Bezprzewodowy serwer wydruków AirPlus G 2,4GHz Przed rozpoczęciem
RS485 MODBUS Module 6RO
 Wersja 1.2 15.10.2012 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.2 15.10.2012 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Przykład 9. Odczyt i przetwarzanie kodów DataMatrix za pomocą sterownika SIMATIC S7-1200
 SIMATIC S7-1200 w przykładach SIMATIC S7-1200 w przykładach Wydanie 1 Egzemplarz bezpłatny Przykłady i Aplikacje www.siemens.pl/s7-1200 Przykład 9 Odczyt i przetwarzanie kodów DataMatrix za pomocą sterownika
SIMATIC S7-1200 w przykładach SIMATIC S7-1200 w przykładach Wydanie 1 Egzemplarz bezpłatny Przykłady i Aplikacje www.siemens.pl/s7-1200 Przykład 9 Odczyt i przetwarzanie kodów DataMatrix za pomocą sterownika
Ćwiczenia z S Komunikacja S z dotykowymi panelami HMI na przykładzie współpracy sterownika z panelem KTP600 PN.
 Ćwiczenia z S7-1200 KTP 600 PN Ćwiczenia z S7-1200 Komunikacja S7-1200 z dotykowymi panelami HMI na przykładzie współpracy sterownika z panelem KTP600 PN FAQ Marzec 2012 1 Spis treści 1 Opis zagadnienia
Ćwiczenia z S7-1200 KTP 600 PN Ćwiczenia z S7-1200 Komunikacja S7-1200 z dotykowymi panelami HMI na przykładzie współpracy sterownika z panelem KTP600 PN FAQ Marzec 2012 1 Spis treści 1 Opis zagadnienia
RS485 MODBUS Module 6RO
 Wersja 2.0 19.12.2012 Dystrybutor Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Wersja 2.0 19.12.2012 Dystrybutor Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Projekt Komputerowych Systemów Sterowania Wymiana danych pomiędzy dwoma sterownikami Siemens S7-300 po sieci Profibus DP
 Gliwice, 7 stycznia 2007-01-07 Projekt Komputerowych Systemów Sterowania Wymiana danych pomiędzy dwoma sterownikami Siemens S7-300 po sieci Profibus DP Janusz Serwin KSS, sem. 9 Informacje ogólne Profibus
Gliwice, 7 stycznia 2007-01-07 Projekt Komputerowych Systemów Sterowania Wymiana danych pomiędzy dwoma sterownikami Siemens S7-300 po sieci Profibus DP Janusz Serwin KSS, sem. 9 Informacje ogólne Profibus
Falownik MOTOVARIO EM16. Skrócona instrukcja obsługi
 Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Falownik MOTOVARIO EM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
MiniModbus 4DO. Moduł rozszerzający 4 wyjścia cyfrowe. Wyprodukowano dla. Instrukcja użytkownika
 Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Instrukcja obsługi Konfigurator MLAN-1000
 Instrukcja obsługi Konfigurator MLAN-1000 Strona 2 z 8 SPIS TREŚCI 1. Logowanie... 3 2. Diagnostyka... 4 3. Konfiguracja sterownika... 5 3.1 Konfiguracja sterownika aktualizacja oprogramowania... 5 4.
Instrukcja obsługi Konfigurator MLAN-1000 Strona 2 z 8 SPIS TREŚCI 1. Logowanie... 3 2. Diagnostyka... 4 3. Konfiguracja sterownika... 5 3.1 Konfiguracja sterownika aktualizacja oprogramowania... 5 4.
Instrukcja aktualizacji oprogramowania. Wersja dokumentu: 01i00 Aktualizacja:
 Instrukcja aktualizacji oprogramowania Wersja dokumentu: 01i00 Aktualizacja: 2016-03-11 Uwagi Inne dokumenty dotyczące obsługi urządzeń można pobrać ze strony energetyka.itr.org.pl Przed aktualizacją oprogramowania
Instrukcja aktualizacji oprogramowania Wersja dokumentu: 01i00 Aktualizacja: 2016-03-11 Uwagi Inne dokumenty dotyczące obsługi urządzeń można pobrać ze strony energetyka.itr.org.pl Przed aktualizacją oprogramowania
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie
 Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
SmartDRIVE protokół transmisji szeregowej RS-485
 SmartDRIVE protokół transmisji szeregowej RS-485 Dokumentacja przygotowana przez firmę Gryftec w oparciu o oryginalną dokumentację dostarczoną przez firmę Westline GRYFTEC 1 / 12 1. Przegląd Kontrolery
SmartDRIVE protokół transmisji szeregowej RS-485 Dokumentacja przygotowana przez firmę Gryftec w oparciu o oryginalną dokumentację dostarczoną przez firmę Westline GRYFTEC 1 / 12 1. Przegląd Kontrolery
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
SKRó CONA INSTRUKCJA OBSŁUGI
 SKRó CONA INSTRUKCJA OBSŁUGI dla systemu Windows Vista SPIS TREśCI Rozdział 1: WYMAGANIA SYSTEMOWE...1 Rozdział 2: INSTALACJA OPROGRAMOWANIA DRUKARKI W SYSTEMIE WINDOWS...2 Instalowanie oprogramowania
SKRó CONA INSTRUKCJA OBSŁUGI dla systemu Windows Vista SPIS TREśCI Rozdział 1: WYMAGANIA SYSTEMOWE...1 Rozdział 2: INSTALACJA OPROGRAMOWANIA DRUKARKI W SYSTEMIE WINDOWS...2 Instalowanie oprogramowania
Komunikacja w sieci Industrial Ethernet z wykorzystaniem Protokołu S7 oraz funkcji BSEND/BRCV
 PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników Simatic S7 300/S7 400, w celu stworzenia komunikacji między dwoma stacjami S7 300 za pomocą sieci Industrial Ethernet, protokołu
PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników Simatic S7 300/S7 400, w celu stworzenia komunikacji między dwoma stacjami S7 300 za pomocą sieci Industrial Ethernet, protokołu
Komunikacja z wykorzystaniem Protokołu TCP oraz funkcji AG_SEND/AG_RECV
 PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników Simatic S7-300/ S7-400, w celu stworzenia komunikacji pomiędzy dwoma stacjami S7-300 za pomocą sieci Industrial Ethernet protokołu
PoniŜszy dokument zawiera opis konfiguracji programu STEP7 dla sterowników Simatic S7-300/ S7-400, w celu stworzenia komunikacji pomiędzy dwoma stacjami S7-300 za pomocą sieci Industrial Ethernet protokołu
Moduł Ethernetowy. instrukcja obsługi. Spis treści
 Moduł Ethernetowy instrukcja obsługi Spis treści 1. Podstawowe informacje...2 2. Konfiguracja modułu...4 3. Podłączenie do sieci RS-485 i LAN/WAN...9 4. Przywracanie ustawień fabrycznych...11 www.el-piast.com
Moduł Ethernetowy instrukcja obsługi Spis treści 1. Podstawowe informacje...2 2. Konfiguracja modułu...4 3. Podłączenie do sieci RS-485 i LAN/WAN...9 4. Przywracanie ustawień fabrycznych...11 www.el-piast.com
OPTIMA PC v2.2.1. Program konfiguracyjny dla cyfrowych paneli domofonowy serii OPTIMA 255 2011 ELFON. Instrukcja obsługi. Rev 1
 OPTIMA PC v2.2.1 Program konfiguracyjny dla cyfrowych paneli domofonowy serii OPTIMA 255 Instrukcja obsługi Rev 1 2011 ELFON Wprowadzenie OPTIMA PC jest programem, który w wygodny sposób umożliwia konfigurację
OPTIMA PC v2.2.1 Program konfiguracyjny dla cyfrowych paneli domofonowy serii OPTIMA 255 Instrukcja obsługi Rev 1 2011 ELFON Wprowadzenie OPTIMA PC jest programem, który w wygodny sposób umożliwia konfigurację
MAGISTRALA PROFIBUS W SIŁOWNIKU 2XI
 DTR Załącznik nr 3 MAGISTRALA PROFIBUS W SIŁOWNIKU 2XI Wydanie 1.2 listopad 2012 r. 1 Załącznik nr 3 DTR 1. Własności interfejsu PROFIBUS DP Siłownik wyposażony w moduł Profibus DP można przyłączyć do
DTR Załącznik nr 3 MAGISTRALA PROFIBUS W SIŁOWNIKU 2XI Wydanie 1.2 listopad 2012 r. 1 Załącznik nr 3 DTR 1. Własności interfejsu PROFIBUS DP Siłownik wyposażony w moduł Profibus DP można przyłączyć do
instrukcja instalacji modemu SpeedTouch 605s
 instrukcja instalacji modemu SpeedTouch 605s Spis treści 1. Opis diod kontrolnych i gniazd modemu SpeedTouch 605s... 2 1.1. Opis diod kontrolnych... 2 1.2. Opis gniazd... 3 2. Konfiguracja połączenia przewodowego...
instrukcja instalacji modemu SpeedTouch 605s Spis treści 1. Opis diod kontrolnych i gniazd modemu SpeedTouch 605s... 2 1.1. Opis diod kontrolnych... 2 1.2. Opis gniazd... 3 2. Konfiguracja połączenia przewodowego...
Falownik MOTOVARIO LM16. Skrócona instrukcja obsługi
 Falownik MOTOVARIO LM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Falownik MOTOVARIO LM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
RS485 MODBUS Module 6RO
 Wersja 2.0 19.12.2012 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 2.0 19.12.2012 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
1. INSTALACJA SERWERA
 1. INSTALACJA SERWERA Dostarczony serwer wizualizacji składa się z: 1.1. RASPBERRY PI w plastikowej obudowie; 1.2. Karty pamięci; 1.3. Zasilacza 5 V DC; 1,5 A; 1.4. Konwertera USB RS485; 1.5. Kabla
1. INSTALACJA SERWERA Dostarczony serwer wizualizacji składa się z: 1.1. RASPBERRY PI w plastikowej obudowie; 1.2. Karty pamięci; 1.3. Zasilacza 5 V DC; 1,5 A; 1.4. Konwertera USB RS485; 1.5. Kabla
INSTRUKCJA UŻYTKOWNIKA MPCC
 V1.0.0 (10.14.2015) 1 (7) INSTALACJA UWAGA: Produkt działa jako urządzenie nadrzędne Modbus. Dlatego w przypadku podłączania narzędzia do istniejącej sieci Modbus konieczne może okazać się odłączenie innego
V1.0.0 (10.14.2015) 1 (7) INSTALACJA UWAGA: Produkt działa jako urządzenie nadrzędne Modbus. Dlatego w przypadku podłączania narzędzia do istniejącej sieci Modbus konieczne może okazać się odłączenie innego
Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi. Przebieg ćwiczenia
 Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Instrukcja obsługi. SmartLink DP AC1335 7390843 / 00 07 / 2010
 Instrukcja obsługi SmartLink P AC1335 PL 7390843 / 00 07 / 2010 Spis treści 1 Instrukcje dotyczące bezpieczeństwa 3 2 Funkcje i własności 3 3 Interfejs Profibus-P 3 4 Montaż 3 5 Podłączenie elektryczne
Instrukcja obsługi SmartLink P AC1335 PL 7390843 / 00 07 / 2010 Spis treści 1 Instrukcje dotyczące bezpieczeństwa 3 2 Funkcje i własności 3 3 Interfejs Profibus-P 3 4 Montaż 3 5 Podłączenie elektryczne
WARIATOR USTAWIENIA Białystok, Plażowa 49/1, Poland,
 WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Wybrać typ czujnika czujnika z paska Halotronowy lub Indukcyjny 2.1. Niezałączony czujnik Halla ewentualnie optyczny
WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Wybrać typ czujnika czujnika z paska Halotronowy lub Indukcyjny 2.1. Niezałączony czujnik Halla ewentualnie optyczny
Konfigurowanie sterownika CX9000 firmy Beckhoff wprowadzenie
 Konfigurowanie sterownika CX9000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX9000 Sterownik CX9000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
Konfigurowanie sterownika CX9000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX9000 Sterownik CX9000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet.
 Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
Kurs SIMATIC S7-300/400 i TIA Portal - Zaawansowany. Spis treści. Dzień 1
 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Interfejs USB-RS485 KOD: INTUR. v.1.0. Zastępuje wydanie: 2 z dnia 19.12.2012
 Interfejs USB-RS485 v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja interfejsu w systemie operacyjnym.... 4 3. Przyłączenie
Interfejs USB-RS485 v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja interfejsu w systemie operacyjnym.... 4 3. Przyłączenie
FAQ: 00000013/PL Data: 16/11/2007 Programowanie przez Internet: Konfiguracja modułów SCALANCE S 612 V2 do komunikacji z komputerem przez VPN
 Za pomocą dwóch modułów SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) chcemy umoŝliwić dostęp do sterownika podłączonego do zabezpieczonej sieci wewnętrznej. Komputer, z którego chcemy mieć
Za pomocą dwóch modułów SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) chcemy umoŝliwić dostęp do sterownika podłączonego do zabezpieczonej sieci wewnętrznej. Komputer, z którego chcemy mieć
OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105
 OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105 Parametry pracy nadajnika TA105 są ustawiane programowo przy pomocy komputera osobistego przez osoby uprawnione przez operatora, które znają kod dostępu (PIN).
OPIS PROGRAMU USTAWIANIA NADAJNIKA TA105 Parametry pracy nadajnika TA105 są ustawiane programowo przy pomocy komputera osobistego przez osoby uprawnione przez operatora, które znają kod dostępu (PIN).
Program EDYTOR-AS-OUX
 Z.S.E. ASTER ul. Brzozowa 13 87-100 Toruń http:\\www.asterlm.mga.com.pl E-mail: asterlm@mga.com.pl m.lewndowski.aster@gmail.com Program EDYTOR-AS-OUX 1. Charakterystyka ogólna Program edytor-as-oux.exe
Z.S.E. ASTER ul. Brzozowa 13 87-100 Toruń http:\\www.asterlm.mga.com.pl E-mail: asterlm@mga.com.pl m.lewndowski.aster@gmail.com Program EDYTOR-AS-OUX 1. Charakterystyka ogólna Program edytor-as-oux.exe
Instrukcja użytkownika ARSoft-WZ1
 05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
Sterownik Spid Pant 8 i Ant 8. Podręcznik użytkowania
 Sterownik Spid Pant 8 i Ant 8 Podręcznik użytkowania Spis treści Spis treści...2 Wprowadzenie...3 Komplet...3 Dane techniczne...3 Panel sterujący...4 Panel tylny...5 Obsługa sterownika...6 Zmiana trybu
Sterownik Spid Pant 8 i Ant 8 Podręcznik użytkowania Spis treści Spis treści...2 Wprowadzenie...3 Komplet...3 Dane techniczne...3 Panel sterujący...4 Panel tylny...5 Obsługa sterownika...6 Zmiana trybu
Konfigurowanie sterownika CP6601 firmy Beckhoff wprowadzenie
 Konfigurowanie sterownika CP6601 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CP6601 Sterownik CP6601 należy do grupy urządzeń określanych jako komputery przemysłowe (Industrial
Konfigurowanie sterownika CP6601 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CP6601 Sterownik CP6601 należy do grupy urządzeń określanych jako komputery przemysłowe (Industrial
Rozdział ten zawiera informacje na temat zarządzania Modułem Modbus TCP oraz jego konfiguracji.
 1 Moduł Modbus TCP Moduł Modbus TCP daje użytkownikowi Systemu Vision możliwość zapisu oraz odczytu rejestrów urządzeń, które obsługują protokół Modbus TCP. Zapewnia on odwzorowanie rejestrów urządzeń
1 Moduł Modbus TCP Moduł Modbus TCP daje użytkownikowi Systemu Vision możliwość zapisu oraz odczytu rejestrów urządzeń, które obsługują protokół Modbus TCP. Zapewnia on odwzorowanie rejestrów urządzeń
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN
 MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
2014 Electronics For Imaging. Informacje zawarte w niniejszej publikacji podlegają postanowieniom opisanym w dokumencie Uwagi prawne dotyczącym tego
 2014 Electronics For Imaging. Informacje zawarte w niniejszej publikacji podlegają postanowieniom opisanym w dokumencie Uwagi prawne dotyczącym tego produktu. 23 czerwca 2014 Spis treści 3 Spis treści...5
2014 Electronics For Imaging. Informacje zawarte w niniejszej publikacji podlegają postanowieniom opisanym w dokumencie Uwagi prawne dotyczącym tego produktu. 23 czerwca 2014 Spis treści 3 Spis treści...5
WARIATOR WYPRZEDZENIA ZAPŁONU WARIATOR USTAWIENIA
 WARIATOR WYPRZEDZENIA ZAPŁONU WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Ustawić przełącznik nr 5 zgodnie z typem czujnika. 2.1. Niezałączony czujnik Halla ewentualnie
WARIATOR WYPRZEDZENIA ZAPŁONU WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Ustawić przełącznik nr 5 zgodnie z typem czujnika. 2.1. Niezałączony czujnik Halla ewentualnie
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Tworzenie programu i konfiguracja w LOGO! Soft Comfort V8
 Poniżej przedstawiono sposób konfiguracji komunikacji pomiędzy przekaźnikiem programowalnym LOGO! 8 oraz panelem SIMATIC HMI. W przykładzie wykorzystano panel KTP700 Basic PN oraz oprogramowanie WinCC
Poniżej przedstawiono sposób konfiguracji komunikacji pomiędzy przekaźnikiem programowalnym LOGO! 8 oraz panelem SIMATIC HMI. W przykładzie wykorzystano panel KTP700 Basic PN oraz oprogramowanie WinCC
Instrukcja użytkownika ARsoft-CFG WZ1 4.0
 05-090 Raszyn, ul Gałczyńskiego 6 tel. (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARsoft-CFG WZ1 4.0 wersja 4.0 www.apar.pl 1 1. Opis Aplikacja ARsoft-CFG umożliwia
05-090 Raszyn, ul Gałczyńskiego 6 tel. (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARsoft-CFG WZ1 4.0 wersja 4.0 www.apar.pl 1 1. Opis Aplikacja ARsoft-CFG umożliwia
FAQ: 00000041/PL Data: 09/06/2012. Zastosowanie zmiennych Raw Data Type WinCC v7.0
 Zmienne typu Raw Data są typem danych surowych nieprzetworzonych. Ten typ danych daje użytkownikowi możliwość przesyłania do oraz z WinCC dużych ilości danych odpowiednio 208 bajtów dla sterowników serii
Zmienne typu Raw Data są typem danych surowych nieprzetworzonych. Ten typ danych daje użytkownikowi możliwość przesyłania do oraz z WinCC dużych ilości danych odpowiednio 208 bajtów dla sterowników serii
Instrukcja użytkownika KRISTECH,
 Sniffer RS-232 z interfejsem Ethernet Instrukcja użytkownika, 2016 www.kristech.eu ver. 31.10.2016-A 1. Wprowadzenie umożliwia podsłuchiwanie danych przesyłanych interfejsem RS-232 przy pomocy sieci Ethernet.
Sniffer RS-232 z interfejsem Ethernet Instrukcja użytkownika, 2016 www.kristech.eu ver. 31.10.2016-A 1. Wprowadzenie umożliwia podsłuchiwanie danych przesyłanych interfejsem RS-232 przy pomocy sieci Ethernet.
Interfejs PC INSTRUKCJA OBSŁUGI. Nr produktu Strona 1 z 8
 INSTRUKCJA OBSŁUGI Interfejs PC Nr produktu 497075 Strona 1 z 8 Funkcje i właściwości możliwość połączenia z każdą centralą XpressNet, kompatybilność z interfejsem Lenz LI101, obsługa szyny informacji
INSTRUKCJA OBSŁUGI Interfejs PC Nr produktu 497075 Strona 1 z 8 Funkcje i właściwości możliwość połączenia z każdą centralą XpressNet, kompatybilność z interfejsem Lenz LI101, obsługa szyny informacji
Spis treści. Dzień 1. I Rozpoczęcie pracy ze sterownikiem (wersja 1707) II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400
 II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400") ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
Kurs Podstawowy S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
VComNet Podręcznik użytkownika. VComNet. Podręcznik użytkownika Wstęp
 VComNet Podręcznik użytkownika Wstęp VComNet przeznaczony jest do wdrażania aplikacji komunikacyjnych uruchomionych na komputerze PC z systemem Windows z urządzeniami połączonymi poprzez RS485 (RS422/RS232)
VComNet Podręcznik użytkownika Wstęp VComNet przeznaczony jest do wdrażania aplikacji komunikacyjnych uruchomionych na komputerze PC z systemem Windows z urządzeniami połączonymi poprzez RS485 (RS422/RS232)
Moduł przełączania temperatury Nr produktu
 INSTRUKCJA OBSŁUGI Moduł przełączania temperatury Nr produktu 000126609 Strona 1 z 5 MODUŁ PRZEŁĄCZANIA TEMPERATURY Nr produktu 12 66 09 TCM 220 Nr produktu 12 66 96 TCM 320 Przeznaczenie do użycia Produkt
INSTRUKCJA OBSŁUGI Moduł przełączania temperatury Nr produktu 000126609 Strona 1 z 5 MODUŁ PRZEŁĄCZANIA TEMPERATURY Nr produktu 12 66 09 TCM 220 Nr produktu 12 66 96 TCM 320 Przeznaczenie do użycia Produkt
RSD Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle
 Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Seria wielofunkcyjnych serwerów sieciowych USB
 Seria wielofunkcyjnych serwerów sieciowych USB Przewodnik szybkiej instalacji Wstęp Niniejszy dokument opisuje kroki instalacji i konfiguracji wielofunkcyjnego serwera sieciowego jako serwera urządzenia
Seria wielofunkcyjnych serwerów sieciowych USB Przewodnik szybkiej instalacji Wstęp Niniejszy dokument opisuje kroki instalacji i konfiguracji wielofunkcyjnego serwera sieciowego jako serwera urządzenia
MAGISTRALA MODBUS W SIŁOWNIKU XSM Opis sterowania
 DTR Załącznik nr 5 MAGISTRALA MODBUS W SIŁOWNIKU XSM Opis sterowania Wydanie 2 czerwiec 2012 r. 1 Załącznik nr 5 DTR Rys.1 Rozmieszczenie złączy i mikroprzełączników na płytce modułu MODBUS 1. Zasilenie
DTR Załącznik nr 5 MAGISTRALA MODBUS W SIŁOWNIKU XSM Opis sterowania Wydanie 2 czerwiec 2012 r. 1 Załącznik nr 5 DTR Rys.1 Rozmieszczenie złączy i mikroprzełączników na płytce modułu MODBUS 1. Zasilenie
DWL-2100AP 802.11g/108Mbps Bezprzewodowy punkt dostępowy D-Link AirPlus XtremeG
 Do skonfigurowania urządzenia może posłużyć każda nowoczesna przeglądarka, np. Internet Explorer 6 lub Netscape Navigator 6.2.3. DWL-2100AP 802.11g/108Mbps Bezprzewodowy punkt dostępowy D-Link AirPlus
Do skonfigurowania urządzenia może posłużyć każda nowoczesna przeglądarka, np. Internet Explorer 6 lub Netscape Navigator 6.2.3. DWL-2100AP 802.11g/108Mbps Bezprzewodowy punkt dostępowy D-Link AirPlus
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Instrukcja wgrywania aktualizacji oprogramowania dla routera Edimax LT-6408n
 Instrukcja wgrywania aktualizacji oprogramowania dla routera Edimax LT-6408n Uwaga! Nowa wersja oprogramowania oznaczona numerem 1.03v jest przeznaczona tylko dla routerów mających współpracować z modemem
Instrukcja wgrywania aktualizacji oprogramowania dla routera Edimax LT-6408n Uwaga! Nowa wersja oprogramowania oznaczona numerem 1.03v jest przeznaczona tylko dla routerów mających współpracować z modemem
Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym
 Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym Zakład Napędu Elektrycznego ISEP PW Wstęp Sterowniki swobodnie programowalne S7-300 należą do sterowników średniej wielkości. Są
Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym Zakład Napędu Elektrycznego ISEP PW Wstęp Sterowniki swobodnie programowalne S7-300 należą do sterowników średniej wielkości. Są
Komunikacja pomiędzy panelem Astraada HMI Panel i sterownikiem Siemens S7-1200 w sieci ProfiNet
 NR: 9 Informator techniczny ASTRAADA HMI Panel Komunikacja pomiędzy panelem Astraada HMI Panel i sterownikiem Siemens S7-1200 w sieci ProfiNet Panele operatorskie Astraada HMI Panel wyposażone w port Ethernet
NR: 9 Informator techniczny ASTRAADA HMI Panel Komunikacja pomiędzy panelem Astraada HMI Panel i sterownikiem Siemens S7-1200 w sieci ProfiNet Panele operatorskie Astraada HMI Panel wyposażone w port Ethernet
Electronic Infosystems
 Department of Optoelectronics and Electronic Systems Faculty of Electronics, Telecommunications and Informatics Gdansk University of Technology Electronic Infosystems Microserver TCP/IP with CS8900A Ethernet
Department of Optoelectronics and Electronic Systems Faculty of Electronics, Telecommunications and Informatics Gdansk University of Technology Electronic Infosystems Microserver TCP/IP with CS8900A Ethernet
CENTRALA STERUJĄCA SMART CONTROL
 Dane Techniczne / Możliwość sterowania urządzeniami marki YOODA i CORTINO za pomocą smartfonów, tabletów i komputera / Tworzenie i zarządzanie grupami urządzeń / Możliwość konfiguracji zdarzeń czasowych
Dane Techniczne / Możliwość sterowania urządzeniami marki YOODA i CORTINO za pomocą smartfonów, tabletów i komputera / Tworzenie i zarządzanie grupami urządzeń / Możliwość konfiguracji zdarzeń czasowych
1. Opis. 2. Wymagania sprzętowe:
 1. Opis Aplikacja ARSOFT-WZ2 umożliwia konfigurację, wizualizację i rejestrację danych pomiarowych urządzeń produkcji APAR wyposażonych w interfejs komunikacyjny RS232/485 oraz protokół MODBUS-RTU. Aktualny
1. Opis Aplikacja ARSOFT-WZ2 umożliwia konfigurację, wizualizację i rejestrację danych pomiarowych urządzeń produkcji APAR wyposażonych w interfejs komunikacyjny RS232/485 oraz protokół MODBUS-RTU. Aktualny
interfejs szeregowy wyświetlaczy do systemów PLC
 LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
Licznik rewersyjny MD100 rev. 2.48
 Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000
 APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 1. Wstęp...3 2. Pierwsze uruchomienie....3 3. Wybór aplikacji i komunikacji...4 4. Sterowanie...6
APLIKACJA COMMAND POSITIONING Z WYKORZYSTANIEM KOMUNIKACJI SIECIOWEJ Z PROTOKOŁEM USS W PRZETWORNICACH MDS/FDS 5000 1. Wstęp...3 2. Pierwsze uruchomienie....3 3. Wybór aplikacji i komunikacji...4 4. Sterowanie...6
1 Moduł Neuronu Cyfrowego SM
 1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
Moduł RS232 E054. TAP - Systemy Alarmowe Sp. z o. o. os. Armii Krajowej 125 61-381 Poznań tel. 061 876 70 88; fax: 061 875 03 03
 TAP - Systemy Alarmowe Sp. z o. o. os. Armii Krajowej 125 61-381 Poznań tel. 061 876 70 88; fax: 061 875 03 03 I n s t r u k c j a O b s ł u g i Ademco Microtech Security Moduł RS232 E054 Nr kat.: L114/A
TAP - Systemy Alarmowe Sp. z o. o. os. Armii Krajowej 125 61-381 Poznań tel. 061 876 70 88; fax: 061 875 03 03 I n s t r u k c j a O b s ł u g i Ademco Microtech Security Moduł RS232 E054 Nr kat.: L114/A
Falowniki Wektorowe Rexroth Fv Parametryzacja
 Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Internet wymagania dotyczące konfiguracji
 Internet wymagania dotyczące konfiguracji Aby połączyć punkt dostępu z programem AP Manager, w ustawieniach TCP/IP komputera należy skonfigurować następujące parametry: Statyczny adres IP: 192.168.1.x
Internet wymagania dotyczące konfiguracji Aby połączyć punkt dostępu z programem AP Manager, w ustawieniach TCP/IP komputera należy skonfigurować następujące parametry: Statyczny adres IP: 192.168.1.x
Modularny system I/O IP67
 Modularny system I/O IP67 Tam gdzie kiedyś stosowano oprzewodowanie wielożyłowe, dziś dominują sieci obiektowe, zapewniające komunikację pomiędzy systemem sterowania, urządzeniami i maszynami. Systemy
Modularny system I/O IP67 Tam gdzie kiedyś stosowano oprzewodowanie wielożyłowe, dziś dominują sieci obiektowe, zapewniające komunikację pomiędzy systemem sterowania, urządzeniami i maszynami. Systemy
RSD Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle
 Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Instrukcja EQU Kantech
 Instrukcja EQU Kantech Pobranie konfiguracji Konfiguracje Kantecha do IFTER EQU pobieramy za pomocą opcji we właściwościach integracji Kantech wskazując lokalizacje katalogu..\data\kantech. Po wskazaniu
Instrukcja EQU Kantech Pobranie konfiguracji Konfiguracje Kantecha do IFTER EQU pobieramy za pomocą opcji we właściwościach integracji Kantech wskazując lokalizacje katalogu..\data\kantech. Po wskazaniu
OBSŁUGA I KONFIGURACJA SIECI W WINDOWS
 OBSŁUGA I KONFIGURACJA SIECI W WINDOWS Jak skonfigurować komputer pracujący pod kontrolą systemu operacyjnego Windows 7, tak aby uzyskać dostęp do internetu? Zakładamy, że komputer pracuje w małej domowej
OBSŁUGA I KONFIGURACJA SIECI W WINDOWS Jak skonfigurować komputer pracujący pod kontrolą systemu operacyjnego Windows 7, tak aby uzyskać dostęp do internetu? Zakładamy, że komputer pracuje w małej domowej
INSTRUKCJA UZUPEŁNIAJĄCA DO CENTRAL DUPLEX ZE STEROWANIEM RD4
 INSTRUKCJA UZUPEŁNIAJĄCA DO CENTRAL DUPLEX ZE STEROWANIEM RD4 Quatrovent Morska 242 Gdynia Tel. +48 58 3505995, fax +48 58 6613553 1 Spis treści I. Ustawienie orientacji wentylatorów...3 A. Za pomocą regulatora
INSTRUKCJA UZUPEŁNIAJĄCA DO CENTRAL DUPLEX ZE STEROWANIEM RD4 Quatrovent Morska 242 Gdynia Tel. +48 58 3505995, fax +48 58 6613553 1 Spis treści I. Ustawienie orientacji wentylatorów...3 A. Za pomocą regulatora
Spis treści. 1 Moduł RFID (APA) 3
 3") Spis treści 1 Moduł RFID (APA) 3 1.1 Konfigurowanie Modułu RFID..................... 3 1.1.1 Lista elementów Modułu RFID................. 3 1.1.2 Konfiguracja Modułu RFID (APA)............... 4 1.1.2.1
Spis treści 1 Moduł RFID (APA) 3 1.1 Konfigurowanie Modułu RFID..................... 3 1.1.1 Lista elementów Modułu RFID................. 3 1.1.2 Konfiguracja Modułu RFID (APA)............... 4 1.1.2.1
Kod produktu: MP-W7100A-RS232
 KONWERTER RS232 - TCP/IP ETHERNET NA BAZIE W7100A FIRMY WIZNET MP-W7100A-RS232 jest gotowym do zastosowania konwerterem standardu RS232 na TCP/IP Ethernet (serwer portu szeregowego). Umożliwia bezpośrednie
KONWERTER RS232 - TCP/IP ETHERNET NA BAZIE W7100A FIRMY WIZNET MP-W7100A-RS232 jest gotowym do zastosowania konwerterem standardu RS232 na TCP/IP Ethernet (serwer portu szeregowego). Umożliwia bezpośrednie
RS485 MODBUS Module 16O
 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej instrukcji
wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej instrukcji
Fiery Remote Scan. Uruchamianie programu Fiery Remote Scan. Skrzynki pocztowe
 Fiery Remote Scan Program Fiery Remote Scan umożliwia zarządzanie skanowaniem na serwerze Fiery server i drukarce ze zdalnego komputera. Programu Fiery Remote Scan można użyć do wykonania następujących
Fiery Remote Scan Program Fiery Remote Scan umożliwia zarządzanie skanowaniem na serwerze Fiery server i drukarce ze zdalnego komputera. Programu Fiery Remote Scan można użyć do wykonania następujących
Mini Modbus 1AI. Moduł rozszerzający 1 wejście analogowe, 1 wyjście cyfrowe. Wyprodukowano dla
 Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Seria wielofunkcyjnych serwerów sieciowych USB
 Seria wielofunkcyjnych serwerów sieciowych USB Przewodnik szybkiej instalacji Wstęp Niniejszy dokument opisuje kroki instalacji i konfiguracji wielofunkcyjnego serwera sieciowego jako serwera urządzenia
Seria wielofunkcyjnych serwerów sieciowych USB Przewodnik szybkiej instalacji Wstęp Niniejszy dokument opisuje kroki instalacji i konfiguracji wielofunkcyjnego serwera sieciowego jako serwera urządzenia
Szybki przewodnik instalacji
 Megapixel IP Camera ACM-5601 Megapixel Day&Night IP Camera ACM-5611 Ver. 080109 Szybki przewodnik instalacji Początki 1.1 Zawartość pudełka ACM-5601/5611 Zasilacz sieciowy (opcjonalnie) Płyta CD Złącza
Megapixel IP Camera ACM-5601 Megapixel Day&Night IP Camera ACM-5611 Ver. 080109 Szybki przewodnik instalacji Początki 1.1 Zawartość pudełka ACM-5601/5611 Zasilacz sieciowy (opcjonalnie) Płyta CD Złącza
FAQ: /PL Data: 2/07/2013 Konfiguracja współpracy programów PC Access i Microsoft Excel ze sterownikiem LOGO!
 Spis treści 1 Opis zagadnienia omawianego w dokumencie.. 2 2 Nowy projekt w LOGO! Soft Comfort.... 3 2.1 Nowy projekt... 3 2.2 Konfiguracja połączenia ethernetowego... 4 3 Program w LOGO! Soft Comfort...
Spis treści 1 Opis zagadnienia omawianego w dokumencie.. 2 2 Nowy projekt w LOGO! Soft Comfort.... 3 2.1 Nowy projekt... 3 2.2 Konfiguracja połączenia ethernetowego... 4 3 Program w LOGO! Soft Comfort...
1 Moduł Neuronu Cyfrowego
 1 Moduł Neuronu Cyfrowego Moduł Neuronu Cyfrowego daje użytkownikowi Systemu Vision możliwość obsługi fizycznych Neuronów Cyfrowych. Dzięki temu możliwe jest sterowanie zewnętrznymi urządzeniami wykonawczymi
1 Moduł Neuronu Cyfrowego Moduł Neuronu Cyfrowego daje użytkownikowi Systemu Vision możliwość obsługi fizycznych Neuronów Cyfrowych. Dzięki temu możliwe jest sterowanie zewnętrznymi urządzeniami wykonawczymi
RS485 MODBUS Module 16RO
 Wersja 1.0 2.12.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 2.12.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T
 Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane