Zmiany. Initial Step krok inicjujący sekwenser
|
|
|
- Maciej Stasiak
- 8 lat temu
- Przeglądów:
Transkrypt

1 Zmiany Initial Step krok inicjujący sekwenser W ferworze walki czasem usuniemy krok inicjujący (po rozpoczęciu FB z GRAPH jest on standardowo oznaczony S1). Skutkuje to tym, że wszystko wygląda dobrze, a sekwenser nie dział nie inicjuje się. Należy wówczas wybranemu krokowi nadać status kroku inicjującego nie musi to być pierwszy krok w sekwencji pojawi się podwójna ramka, którą czasem przy dużych rozdzielczościach niezbyt dokładnie widać. Przed zmianą Po zmianie

2 SFC Graf sekwencji SFC zakłada dekompozycję procesu sekwencyjnego na rozdzielne operacje wykonywane w kolejnych etapach (krokach). Kolejny krok może zostać wykonany, jeśli prawdziwy jest warunek przejścia (tranzycja) i wykonał się krok poprzedni. Implementację SFC w postaci narzędzia graficznego możemy znaleźć np. w oprogramowaniu firmy Siemens pod nazwą GRAPH7. Do programowanie w GRAPH7 wykorzystujemy następujące symbole: Krok i tranzycja Krok Tranzycja Zakończenie sekwencji Skok do wybranego kroku Początek wyboru sekwencji Początek sekwencji współbieżnych Zamknięcie gałęzi Na Rys. 1 przedstawiono podstawowe symbole i budowane z nich struktury. Kwadraty z liczbą poprzedzoną literą S w środku (tutaj od S1 do S12) nazywane są krokami lub etapami. Obrazują one zbiory stanów lub akcji do wykonania. Dokładniejszy opis akcji, skojarzonych z każdym etapem, może znajdować się w prostokącie po prawej stronie kwadratu z numerem etapu (tutaj akcja...). Każda sieć SFC powinna posiadać tylko jeden element określony zbiorem etapów aktywnych w chwili początkowej oraz początkowymi wartościami jego stanów wewnętrznych i wyjść. Krok aktywny w chwili początkowej wyróżniony jest przez kwadrat rysowany podwójną kreską (ta konwencja nie zawsze jest zachowywana). Na omawianym rysunku jest to krok z numerem S1.

3 (Trans 1) (Trans 2) (Trans 3) (Trans 4) (Trans 5) S1 S2 S3 S4 S5 S6 a - przejście (tranzycja a) b c d e (7) T12 cel skoku po spełnieniu warunku Trans 12 akcja... f akcja 1 akcja 2 Rozpoczęcie sekwencji współbieżnych akcja... Ominięcie sekwencji (8) (9) A S8 S9 g h S7 (10) (11) akcja... S10 S11 B Zakończenie wyboru sekwencji i j Rozpoczęcie wyboru sekwencji (Trans 6) (Trans 12) S12 k l S1 Zakończenie sekwencji współbieżnych akcja 12 Skok do kroku S1 po spełnieniu warunku l Rys. 1. Przykład grafu SFC Połączenia pomiędzy kolejnymi krokami w postaci graficznej przedstawiamy jako pionowe odcinki łączące kolejne kroki (etapy). Kierunek przepływu sterowania w odcinkach łączących przyjmowany jest domyślnie jako z góry (wejście) do dołu (wyjście). Przejścia nazywane tranzycjami (ang. transition) zobrazowane graficznie krótkimi poziomymi, grubymi odcinkami, prostopadłymi do linii łączącej kolejne kroki, ponumerowane zostały liczbami, poprzedzonymi słówkiem Trans (konwencja notacji Siemensa), umieszczonymi w nawiasach po lewej stronie znaku. Są one aktywne, jeśli skojarzone z nimi warunki logiczne (małe litery alfabetu od a do k, po prawej stronie kreski obrazującej warunek przejścia) przyjmą stan ON. Oprócz tego na rysunku widzimy rozpoczęcie i zakończenie sekwencji procesów współbieżnych (podwójne poziome kreski) oraz wyboru sekwencji (pojedyncze poziome kreski).
 S12 k l S1 Zakończenie sekwencji współbieżnych akcja 12")
4 Na Rys. 1 pokazano również skok, w tym przypadku powrót do kroku S1, w celu zapętlenia procesu. Przy strzałce w dół poniżej kroku S12 Opis przykładu z rysunku 1 Opis przykładowego systemu przedstawionego na Rys. 1 jest następujący. W chwili początkowej wykonywany jest krok S1 aż do chwili, w której zostanie spełniony warunek a = 1. Spełnienie warunku przejścia (Trans 1) spowoduje uruchomienie kroku S2, krok S1 przestaje być aktywny. Kolejne wykonywanie kroków analogiczne do przejścia pomiędzy krokami S1 i S2 nazywamy sekwencją prostą. Aktywowanie przejścia (Trans 2) poprzez nadanie wartości 1 zmiennej b spowoduje rozpoczęcie wykonywania sekwencji współbieżnych, które rozpoczynają się poniżej podwójnej poziomej kreski, jedna od kroku S3, a druga od kroku S7. Prawa sekwencja rozpoczyna się od kroku S7, po jego wykonaniu dochodzi do struktury nazywanej wyborem sekwencji (pozioma kreska). W tym przypadku dochodzi do wyboru sekwencji A lub B. Wykonana zostanie ta sekwencja, której tranzycja stanie się aktywna. Implementacja tej sekwencji musi być tak zorganizowana, aby nie można było dokonać więcej niż jednego wyboru. Zakładając, że zmienna i = 1, wykonana zostanie sekwencja prosta kroków S10 i S11, co spowoduje dojście tej gałęzi do zakończenia sekwencji współbieżnych. Wracając do kroku S3 można zauważyć, że przy aktywnym przejściu (Trans 3) wykona się sekwencja prosta kroków S3 i S4, a następnie rozpocznie się szczególny przypadek wyboru sekwencji nazywany ominięciem sekwencji. Cechą charakterystyczną tego przypadku jest to, że jedna z gałęzi nie zawiera żadnych kroków. W pokazanym przypadku, jeśli f = 1, to kroki S5 i %6 nie zostaną wykonane. Jeśli obie sekwencje współbieżne wykonają swoje zadania i zajdzie warunek k = 1, to nastąpi wykonanie kroku S12, po którym, jeżeli zajdzie warunek l = 1 (aktywn3 przejście Trans 12), system powinien wykonać skok do kroku S1. Omówienie przykładu rysunkowego ma posłużyć zademonstrowaniu najczęściej spotykanych struktur przy modelowaniu systemu sekwencyjnego z użyciem SFC.
 spowoduje uruchomienie kroku S2, krok S1 przestaje być aktywny.")
5 Opis przykładu z rysunku 2 Na Rys. 2 przedstawiony został graf SFC pewnego procesu. Zadaniem postawionym przed tym przykładowym procesem jest równoczesne przygotowanie powierzchni dwóch elementów E1 i E2, naniesienie na nie warstwy kleju, odczekanie zadanego interwału czasu T1 i T2 potrzebnego na odparowanie składowych lotnych kleju i dociśnięcie sklejanych powierzchni. Warunki początkowe pozwalające na rozpoczęcie procesu określone są przez sygnały pochodzące z czujników obecności elementów CE1 i CE2 w instalacjach przygotowania powierzchni i nanoszenia warstwy kleju (IPP1, IPP2) oraz pojawieniu się impulsu pochodzącego od przycisku sterowniczego START umieszczonego na konsoli operatora. Pprzykład jest mocno strywializowany przez pominięcie wielu czujników i układów wykonawczych, czy choćby przycisku sterowniczego odpowiadającego za zatrzymanie awaryjne. Jest to jednak konieczne ze względu na czytelność i objętość przykładu. (1) 1 START AND CE1 AND CE2 zakończono krok 1 IPP1 (2) 2 3 Przygotowanie pow. i smarowanie E1 zakończono krok 2 Opóźnienie T1 IPP2 (3) 4 5 Przygotowanie pow. i smarowanie E2 zakończono krok 4 Opóźnienie T2 prasa (4) 6 zakończono krok 3 i krok 5 Docisk elementów E1 i E2 Rys. 2. Graf SFC przykładowego procesu

6 Realizacja przykładowego programu z użyciem SFC i i oprogramowania TIA 12 S1 Pozycja startowa Startowa Docisk S2 Obecność Półproduktu Półprodukt S3 Docisk Półproduktu S4 Nagrzewanie C2 V C1 JestPółp Nagrzewnica V1 S5 Zwolnienie docisku Skok do S1 C1 cewka zaworu V1; C2 cewka zaworu V1; Startowa - sygnał z wyłącznika krańcowego Startowa; Docisk - sygnał z wyłącznika krańcowego Docisk; Rys. 3. Przykłada do realizacji Krok Opis Nazwa S1 Pierwszym krokiem jest zawsze krok startowy (inicjujący) tutaj stan wysoki markera informującego o pojawieniu się stanu wysokiego zmiennej START. Sprawdzenie czy siłownik znajduje się w położeniu Starowym jeżeli nie to ustawienie siłownika w tym położeniu Home S2 Sprawdzanie obecności półproduktu Półprodukt S3 Uruchomienie siłownika dociskającego półprodukt i załączenie nagrzewnicy. Docisk S4 Nagrzewanie przez określony czas (np. 10 s) Nagrzewanie S5 Zwolnienie docisku powrót siłownika do położenia początkowego. Zakończenie procesu i powrót do pozycji Startowej Zwolnienie


7 Konfiguracja sterownika S7-300


8 Tworzenie tabeli zmiennych 1. Dodaj nową tabelę zmiennych 2. Zmień nazwę nowopowstałej tabeli zmiennych na TagiGrafuSekwencji Dodawanie Tagów


9 Tworzenie globalnego blok danych 3. Nazwij go GlobalnyBlokDanych 1. Dodaj nowy blok 2. Wybierz blok typu Data block


10 Tworzenie blok funkcji sekwensera 2. Zmień nazwę bloku na sekwenser 3. Z listy rozwijalnej wybierz język programowania bloku funkcji sekwenser 1. Wybierz blok typu Function Block 4. Zatwierdź utworzenie bloku W efekcie otrzymano

11 Struktura przykładowego sekwensera


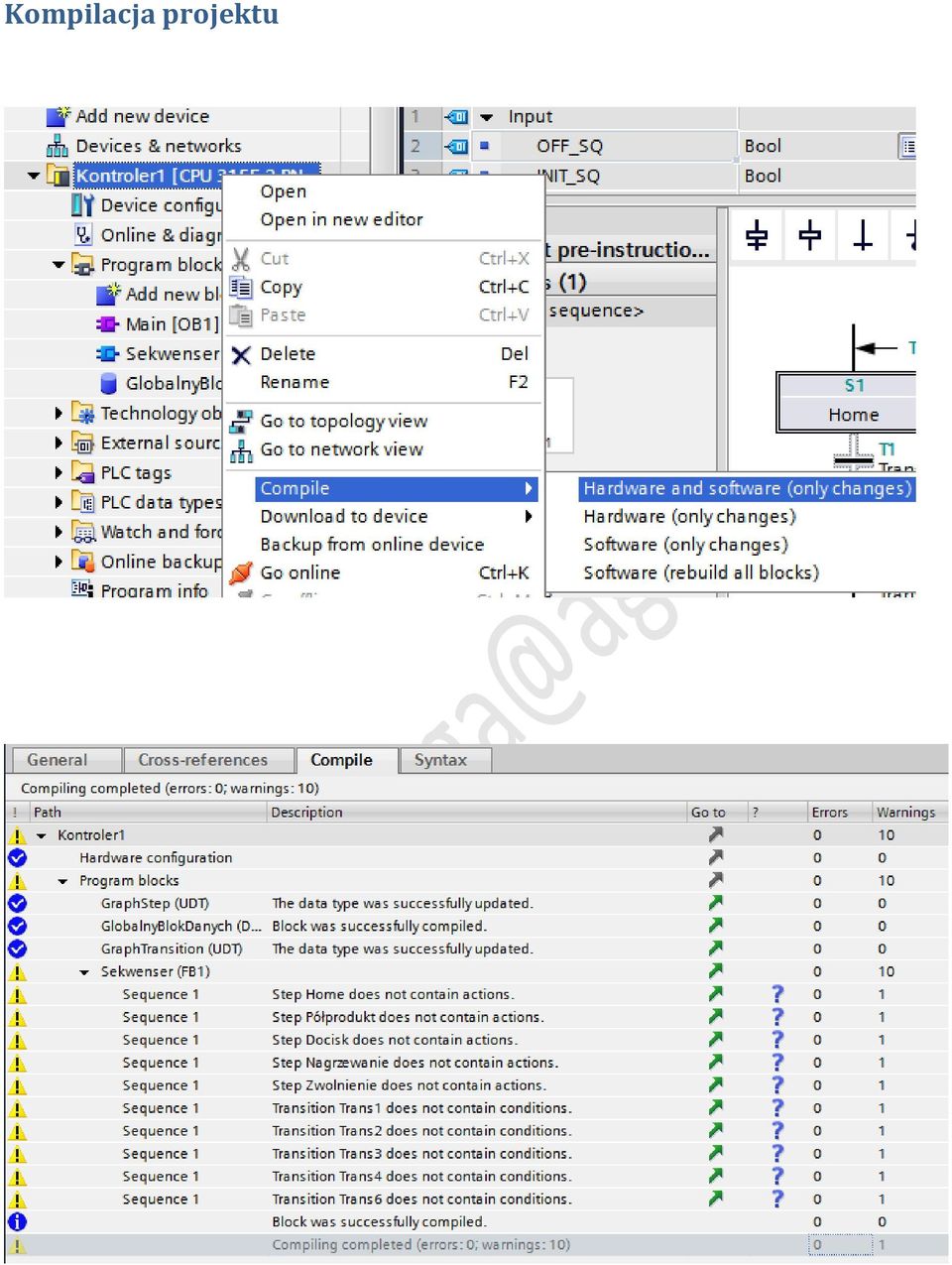
12 Kompilacja projektu
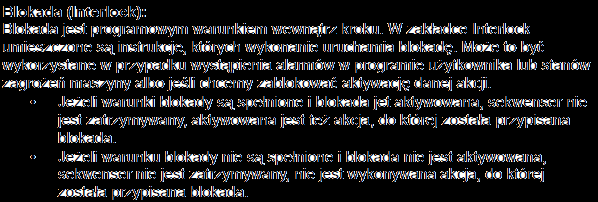
13 Kroki

14


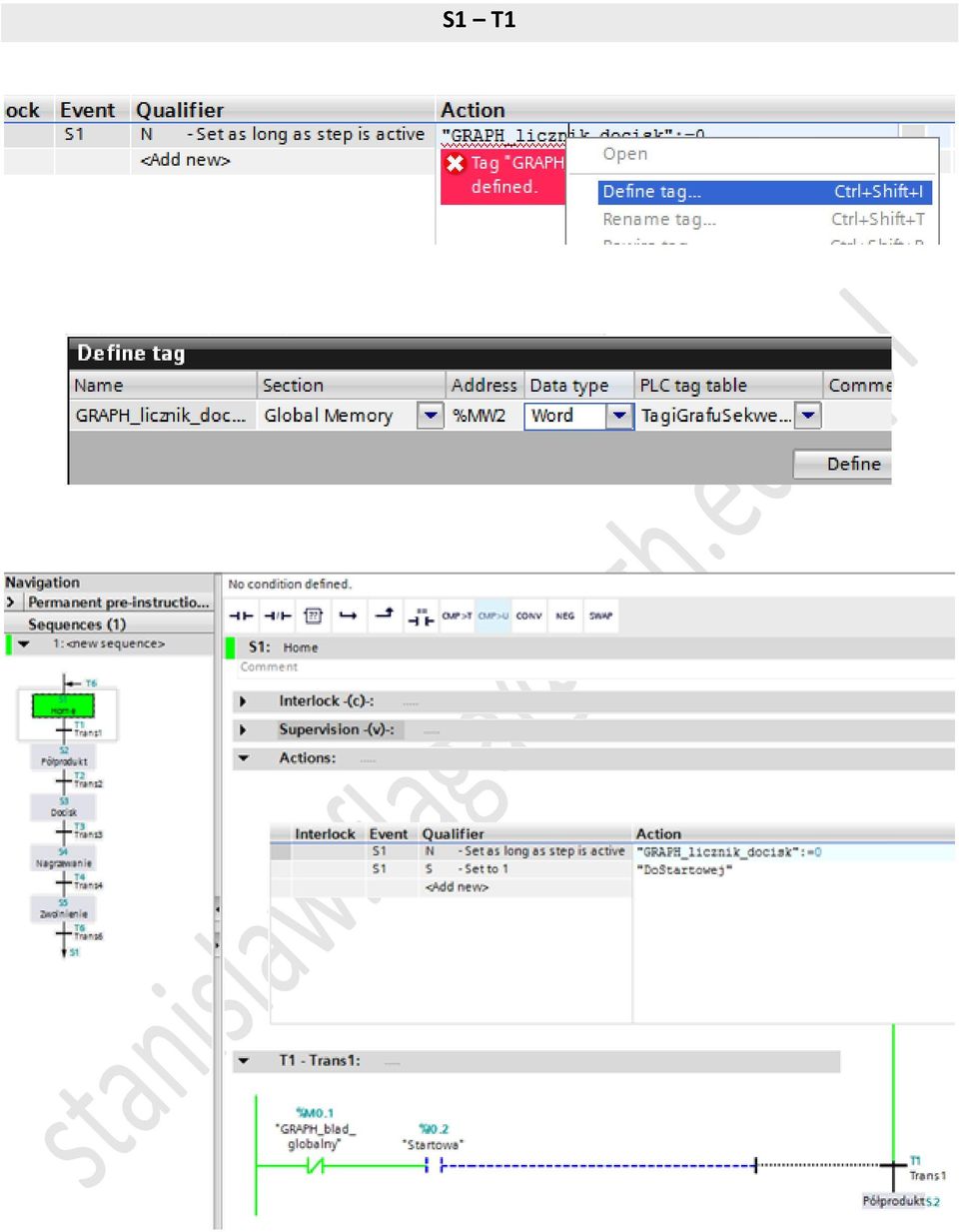
15 Wielokrotne warunki przejścia Używa się go w celu zatrzymania sekwensera w przypadku wystąpienia błędu globalnego.


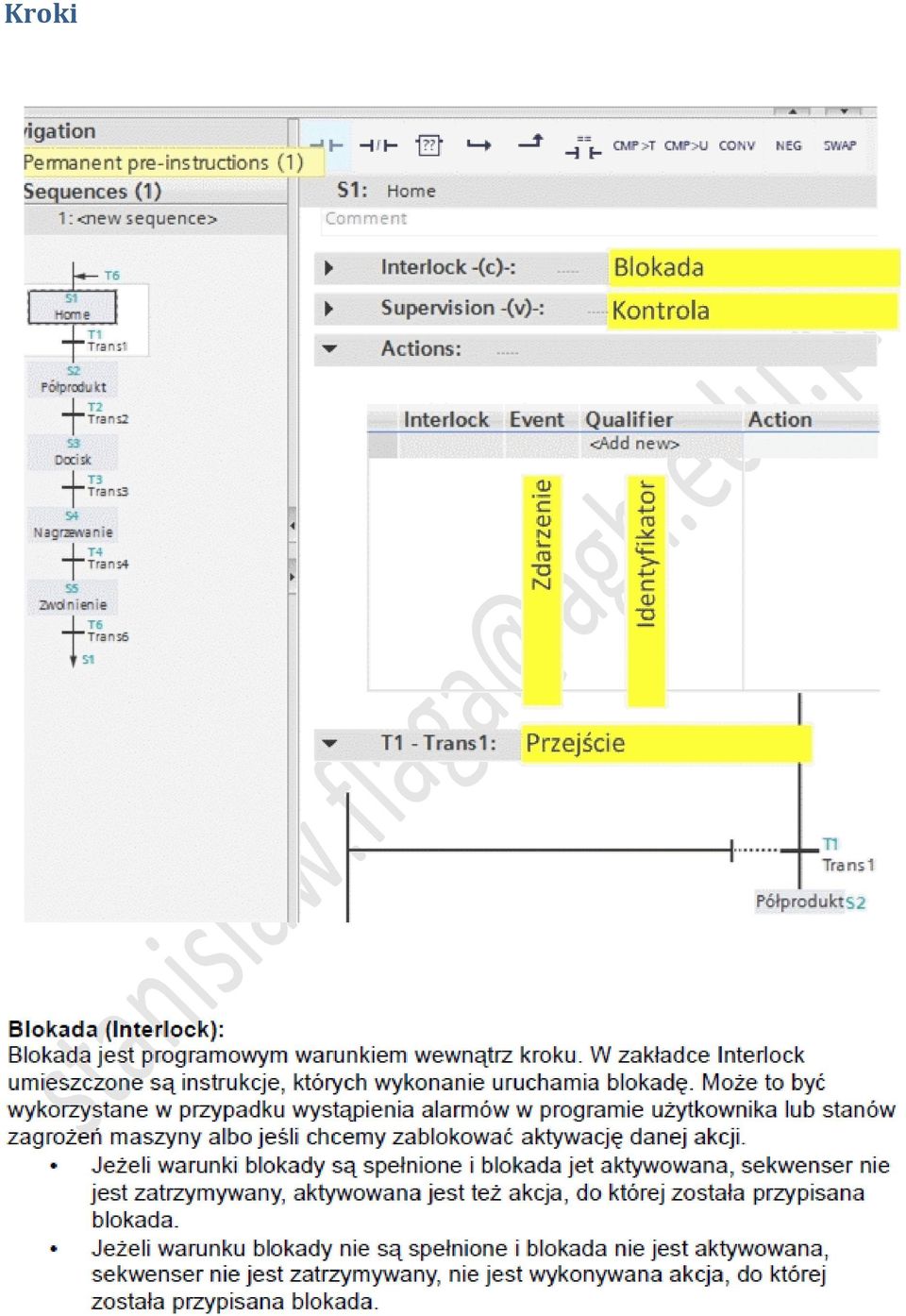
16 Skopiować GRAPH_blad_globany do wszystkich tranzycji
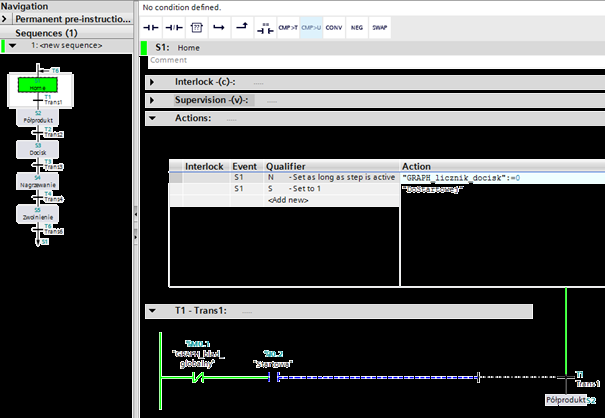
17 S1 T1

18

19

20


21 Wywołanie sekwensera Permanent pre i post instruction Miejsce na umieszczenie instrukcji wykonywanych przed i po sekwencji. UWAGA 1: jeżeli FB sekwensera jest wywołane to pre/post instrukcje wykonywane są w każdym cyklu niezależnie od stanu sekwensera

22 Supervision korzystanie z kontroli kroku UWAGA 1: zablokowanie przejścia do kolejnego kroku jezeli (v) = 1 Jeżeli ustawiono kwitowanie blokowania przejścia Należy po spełnieniu warunku przejścia ustawić 1 na ACK_EF w celu skwitowania
 =")
23 Interlock korzystanie z blokady UWAGA 1: nie są wykonywane zablokowane akcje jeżeli (c) = 0
JĘZYK SFC Sequential Function Chart ki 2004 Graf sekwencji rbańs rad U on inż. K dr
 JĘZYK SFC Sequential Function Chart Graf sekwencji TRANSITION tranzycja, przejście START INITIAL STEP blok/krok startowy/początkowy/ inicjujący blok aktywny STEP blok, krok blok nieaktywny Zawsze bloki
JĘZYK SFC Sequential Function Chart Graf sekwencji TRANSITION tranzycja, przejście START INITIAL STEP blok/krok startowy/początkowy/ inicjujący blok aktywny STEP blok, krok blok nieaktywny Zawsze bloki
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
SFC zawiera zestaw kroków i tranzycji (przejść), które sprzęgają się wzajemnie przez połączenia
, które sprzęgają się wzajemnie przez połączenia") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
W_4 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Procedura tworzenia oprogramowania sterownika Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Każdy program w sterowniku PLC, bez względu na jego postać, wykonywany jest cyklicznie. - obsługa wejść - polega na odczytaniu aktualnych sta- Cykl programowy nów na wejściach sterownika i wpisaniu ich
Każdy program w sterowniku PLC, bez względu na jego postać, wykonywany jest cyklicznie. - obsługa wejść - polega na odczytaniu aktualnych sta- Cykl programowy nów na wejściach sterownika i wpisaniu ich
1. JĘZYK SFC WPROWADZENIE
 DODATEK: JĘZYK SFC. JĘZYK SFC PROADZENIE Język SFC jest językiem graficznym opartym na teorii sieci Petriego typu P/T (pozycja/tranzycja). Należy do grupy języków sekwencyjnych schematów funkcjonalnych
DODATEK: JĘZYK SFC. JĘZYK SFC PROADZENIE Język SFC jest językiem graficznym opartym na teorii sieci Petriego typu P/T (pozycja/tranzycja). Należy do grupy języków sekwencyjnych schematów funkcjonalnych
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
1. SFC W PAKIECIE ISAGRAF 2. EDYCJA PROGRAMU W JĘZYKU SFC. ISaGRAF WERSJE 3.4 LUB 3.5 1
 ISaGRAF WERSJE 3.4 LUB 3.5 1 1. SFC W PAKIECIE ISAGRAF 1.1. Kroki W pakiecie ISaGRAF użytkownik nie ma możliwości definiowania własnych nazw dla kroków. Z każdym krokiem jest związany tzw. numer odniesienia
ISaGRAF WERSJE 3.4 LUB 3.5 1 1. SFC W PAKIECIE ISAGRAF 1.1. Kroki W pakiecie ISaGRAF użytkownik nie ma możliwości definiowania własnych nazw dla kroków. Z każdym krokiem jest związany tzw. numer odniesienia
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
PLC - język tekstu strukturalnego ST
 PLC - język tekstu strukturalnego ST Język tekstu strukturalnego ST jest odpowiednikiem języka wysokiego poziomu, zawiera podobny zestaw instrukcji jak Pascal czy C. Podstawowymi elementami języka są wyrażenia
PLC - język tekstu strukturalnego ST Język tekstu strukturalnego ST jest odpowiednikiem języka wysokiego poziomu, zawiera podobny zestaw instrukcji jak Pascal czy C. Podstawowymi elementami języka są wyrażenia
Podstawowe procedury przy tworzeniu programu do sterownika:
 Podstawowe procedury przy tworzeniu programu do sterownika: 1. Opracowanie algorytmu sterowania procesem, potwierdzonego przez technologa. 2. Oszacowanie wielkości obiektu, czyli liczby punktów (liczby
Podstawowe procedury przy tworzeniu programu do sterownika: 1. Opracowanie algorytmu sterowania procesem, potwierdzonego przez technologa. 2. Oszacowanie wielkości obiektu, czyli liczby punktów (liczby
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Język UML w modelowaniu systemów informatycznych
 Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 7 Przeglądowe diagramy interakcji Przeglądowe diagramy interakcji wiążą
Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 7 Przeglądowe diagramy interakcji Przeglądowe diagramy interakcji wiążą
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Rozdział 5. Administracja kontami użytkowników
 Rozdział 5. Administracja kontami użytkowników Ćwiczenia zawarte w tym rozdziale pozwolą przygotować oddzielne środowisko pracy dla każdego użytkownika komputera. Windows XP, w porównaniu do systemów Windows
Rozdział 5. Administracja kontami użytkowników Ćwiczenia zawarte w tym rozdziale pozwolą przygotować oddzielne środowisko pracy dla każdego użytkownika komputera. Windows XP, w porównaniu do systemów Windows
ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
Roboty Przemysłowe. Rys. 1. Główne okno Automation Studio.
 Roboty Przemysłowe 2. Pozycjonowane zderzakowo manipulatory pneumatyczne - symulacja pracy manipulatora w środowisku Automation Studio Celem ćwiczenia jest przygotowanie i przeprowadzenie symulacji ruchu
Roboty Przemysłowe 2. Pozycjonowane zderzakowo manipulatory pneumatyczne - symulacja pracy manipulatora w środowisku Automation Studio Celem ćwiczenia jest przygotowanie i przeprowadzenie symulacji ruchu
koniec punkt zatrzymania przepływów sterowania na diagramie czynności
 Diagramy czynności opisują dynamikę systemu, graficzne przedstawienie uszeregowania działań obrazuje strumień wykonywanych czynności z ich pomocą modeluje się: - scenariusze przypadków użycia, - procesy
Diagramy czynności opisują dynamikę systemu, graficzne przedstawienie uszeregowania działań obrazuje strumień wykonywanych czynności z ich pomocą modeluje się: - scenariusze przypadków użycia, - procesy
1. Wstęp. dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 4!!!
 Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
STARTER SEED V4.0 INSTRUKCJA OBSŁUGI
 STARTER SEED V4.0 INSTRUKCJA OBSŁUGI 13.02.2018 Sterownik STARTER SEED to nowoczesne urządzenie, wykorzystujące zaawansowany technologicznie wyświetlacz OLED. Zaletą tego typu wyświetlaczy jest doskonały
STARTER SEED V4.0 INSTRUKCJA OBSŁUGI 13.02.2018 Sterownik STARTER SEED to nowoczesne urządzenie, wykorzystujące zaawansowany technologicznie wyświetlacz OLED. Zaletą tego typu wyświetlaczy jest doskonały
etrader Pekao Podręcznik użytkownika Strumieniowanie Excel
 etrader Pekao Podręcznik użytkownika Strumieniowanie Excel Spis treści 1. Opis okna... 3 2. Otwieranie okna... 3 3. Zawartość okna... 4 3.1. Definiowanie listy instrumentów... 4 3.2. Modyfikacja lub usunięcie
etrader Pekao Podręcznik użytkownika Strumieniowanie Excel Spis treści 1. Opis okna... 3 2. Otwieranie okna... 3 3. Zawartość okna... 4 3.1. Definiowanie listy instrumentów... 4 3.2. Modyfikacja lub usunięcie
Język UML w modelowaniu systemów informatycznych
 Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 4 Diagramy aktywności I Diagram aktywności (czynności) (ang. activity
Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 4 Diagramy aktywności I Diagram aktywności (czynności) (ang. activity
Uruchomienie programu COMPAS 2026LAN
 Zakład Elektroniki COMPAS 05-110 Jabłonna ul. Modlińska 17 B tel. (+48 22) 782-43-15 fax. (+48 22) 782-40-64 e-mail: ze@compas.com.pl http://www.compas.com.pl PIERWSZE KROKI W PROGRAMIE COMPAS 2026LAN
Zakład Elektroniki COMPAS 05-110 Jabłonna ul. Modlińska 17 B tel. (+48 22) 782-43-15 fax. (+48 22) 782-40-64 e-mail: ze@compas.com.pl http://www.compas.com.pl PIERWSZE KROKI W PROGRAMIE COMPAS 2026LAN
1. Realizacja programowa sekwencyjnego sterowania windą w bloku mieszkalnym
 1. Realizacja programowa sekwencyjnego sterowania windą w bloku mieszkalnym 1.1. Wprowadzenie Windy są nieodzownym atrybutem bloków mieszkalnych o dużej liczbie pięter. W zależności od liczby wind obsługujących
1. Realizacja programowa sekwencyjnego sterowania windą w bloku mieszkalnym 1.1. Wprowadzenie Windy są nieodzownym atrybutem bloków mieszkalnych o dużej liczbie pięter. W zależności od liczby wind obsługujących
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Najkrótsza droga Maksymalny przepływ Najtańszy przepływ Analiza czynności (zdarzeń)
") Carl Adam Petri (1926-2010) Najkrótsza droga Maksymalny przepływ Najtańszy przepływ Analiza czynności (zdarzeń) Problemy statyczne Kommunikation mit Automaten praca doktorska (1962) opis procesów współbieżnych
Carl Adam Petri (1926-2010) Najkrótsza droga Maksymalny przepływ Najtańszy przepływ Analiza czynności (zdarzeń) Problemy statyczne Kommunikation mit Automaten praca doktorska (1962) opis procesów współbieżnych
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Modułowy programowalny przekaźnik czasowy firmy Aniro.
 Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
1 Moduł Neuronu Cyfrowego SM
 1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
Zadanie egzaminacyjne E 19 Nr zad 02
 Zada egzaminacyjne E 19 Nr zad 02 Siłowniki Al i A2 uruchamiane są elektrozaworami sterowanymi przekaźnikowym układem elektrycznym (rysunek 1). Po wyłączeniu układu tłoczyska siłowników pozostają w położeniu,
Zada egzaminacyjne E 19 Nr zad 02 Siłowniki Al i A2 uruchamiane są elektrozaworami sterowanymi przekaźnikowym układem elektrycznym (rysunek 1). Po wyłączeniu układu tłoczyska siłowników pozostają w położeniu,
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Pierwsze kroki z easy Soft CoDeSys. 2009 Eaton Corporation. All rights reserved.
 Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
CoDeSys 3 programowanie w języku CFC
 Notatka Aplikacyjna NA 03003PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka CFC... 5 4. Składnia języka CFC
Notatka Aplikacyjna NA 03003PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka CFC... 5 4. Składnia języka CFC
3. Sieć PLAN. 3.1 Adresowanie płyt głównych regulatora pco
 3. Sieć PLAN Wszystkie urządzenia podłączone do sieci plan są identyfikowane za pomocą swoich adresów. Ponieważ terminale użytkownika i płyty główne pco wykorzystują ten sam rodzaj adresów, nie mogą posiadać
3. Sieć PLAN Wszystkie urządzenia podłączone do sieci plan są identyfikowane za pomocą swoich adresów. Ponieważ terminale użytkownika i płyty główne pco wykorzystują ten sam rodzaj adresów, nie mogą posiadać
Komunikacja sterownika PLC Fatek jako master w protokole ModBus RTU
 Komunikacja sterownika PLC Fatek jako master w protokole ModBus RTU 1. Konfiguracja portu komunikacyjnego - dokonuje się tego w oprogramowaniu narzędziowym WinProladder, z menu PLC->Setting->Port Parameter:
Komunikacja sterownika PLC Fatek jako master w protokole ModBus RTU 1. Konfiguracja portu komunikacyjnego - dokonuje się tego w oprogramowaniu narzędziowym WinProladder, z menu PLC->Setting->Port Parameter:
Przemysłowe Systemy Automatyki ĆWICZENIE 2
 Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów Przemysłowe Systemy Automatyki ĆWICZENIE 2 Sterowanie poziomem cieczy w zbiornikach Celem ćwiczenia jest zapoznanie z działaniem przekaźnika
Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów Przemysłowe Systemy Automatyki ĆWICZENIE 2 Sterowanie poziomem cieczy w zbiornikach Celem ćwiczenia jest zapoznanie z działaniem przekaźnika
1. Zbiornik mleka. woda. mleko
 Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
Wymiarowanie i teksty. Polecenie:
 11 Wymiarowanie i teksty Polecenie: a) Utwórz nowy rysunek z pięcioma warstwami, dla każdej warstwy przyjmij inny, dowolny kolor oraz grubość linii. Następnie narysuj pokazaną na rysunku łamaną warstwie
11 Wymiarowanie i teksty Polecenie: a) Utwórz nowy rysunek z pięcioma warstwami, dla każdej warstwy przyjmij inny, dowolny kolor oraz grubość linii. Następnie narysuj pokazaną na rysunku łamaną warstwie
Celem ćwiczenia jest zapoznanie się z podstawowymi funkcjami i pojęciami związanymi ze środowiskiem AutoCAD 2012 w polskiej wersji językowej.
 W przygotowaniu ćwiczeń wykorzystano m.in. następujące materiały: 1. Program AutoCAD 2012. 2. Graf J.: AutoCAD 14PL Ćwiczenia. Mikom 1998. 3. Kłosowski P., Grabowska A.: Obsługa programu AutoCAD 14 i 2000.
W przygotowaniu ćwiczeń wykorzystano m.in. następujące materiały: 1. Program AutoCAD 2012. 2. Graf J.: AutoCAD 14PL Ćwiczenia. Mikom 1998. 3. Kłosowski P., Grabowska A.: Obsługa programu AutoCAD 14 i 2000.
PROGRAMY STEROWANIA I WIZUALIZACJI II
 PWSZ SW W8 PROGRAMY STEROWANIA I WIZUALIZACJI II Układ sekwencyjny Start Stop. Podnośnik góra dół. Układ czasowy naprzemienne załączanie/wyłączanie. Sterowanie symulowanym zbiornikiem. 1. Zadanie UKŁAD
PWSZ SW W8 PROGRAMY STEROWANIA I WIZUALIZACJI II Układ sekwencyjny Start Stop. Podnośnik góra dół. Układ czasowy naprzemienne załączanie/wyłączanie. Sterowanie symulowanym zbiornikiem. 1. Zadanie UKŁAD
Materiały dodatkowe. Simulink PLC Coder
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano
 Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
5. Administracja kontami uŝytkowników
 5. Administracja kontami uŝytkowników Windows XP, w porównaniu do systemów Windows 9x, znacznie poprawia bezpieczeństwo oraz zwiększa moŝliwości konfiguracji uprawnień poszczególnych uŝytkowników. Natomiast
5. Administracja kontami uŝytkowników Windows XP, w porównaniu do systemów Windows 9x, znacznie poprawia bezpieczeństwo oraz zwiększa moŝliwości konfiguracji uprawnień poszczególnych uŝytkowników. Natomiast
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Algorytmy sztucznej inteligencji
 Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Algorytmy sztucznej inteligencji Dynamiczne sieci neuronowe 1 Zapis macierzowy sieci neuronowych Poniżej omówione zostaną części składowe sieci neuronowych i metoda ich zapisu za pomocą macierzy. Obliczenia
Podstawy programowania. Wykład Funkcje. Krzysztof Banaś Podstawy programowania 1
 Podstawy programowania. Wykład Funkcje Krzysztof Banaś Podstawy programowania 1 Programowanie proceduralne Pojęcie procedury (funkcji) programowanie proceduralne realizacja określonego zadania specyfikacja
Podstawy programowania. Wykład Funkcje Krzysztof Banaś Podstawy programowania 1 Programowanie proceduralne Pojęcie procedury (funkcji) programowanie proceduralne realizacja określonego zadania specyfikacja
b) Dorysuj na warstwie pierwszej (1) ramkę oraz tabelkę (bez wymiarów) na warstwie piątej (5) według podanego poniżej wzoru:
 Dorysuj na warstwie pierwszej (1) ramkę oraz tabelkę (bez wymiarów) na warstwie piątej (5) według podanego poniżej wzoru:") Wymiarowanie i teksty 11 Polecenie: a) Utwórz nowy rysunek z pięcioma warstwami, dla każdej warstwy przyjmij inny, dowolny kolor oraz grubość linii. Następnie narysuj pokazaną na rysunku łamaną na warstwie
Wymiarowanie i teksty 11 Polecenie: a) Utwórz nowy rysunek z pięcioma warstwami, dla każdej warstwy przyjmij inny, dowolny kolor oraz grubość linii. Następnie narysuj pokazaną na rysunku łamaną na warstwie
1 Moduł Inteligentnego Głośnika
 1 Moduł Inteligentnego Głośnika Moduł Inteligentnego Głośnika zapewnia obsługę urządzenia fizycznego odtwarzającego komunikaty dźwiękowe. Dzięki niemu możliwa jest konfiguracja tego elementu Systemu oraz
1 Moduł Inteligentnego Głośnika Moduł Inteligentnego Głośnika zapewnia obsługę urządzenia fizycznego odtwarzającego komunikaty dźwiękowe. Dzięki niemu możliwa jest konfiguracja tego elementu Systemu oraz
Przed rozpoczęciem pracy otwórz nowy plik (Ctrl +N) wykorzystując szablon acadiso.dwt
 wykorzystując szablon acadiso.dwt") Przed rozpoczęciem pracy otwórz nowy plik (Ctrl +N) wykorzystując szablon acadiso.dwt Zadanie: Utwórz szablon rysunkowy składający się z: - warstw - tabelki rysunkowej w postaci bloku (według wzoru poniżej)
Przed rozpoczęciem pracy otwórz nowy plik (Ctrl +N) wykorzystując szablon acadiso.dwt Zadanie: Utwórz szablon rysunkowy składający się z: - warstw - tabelki rysunkowej w postaci bloku (według wzoru poniżej)
INSTRUKCJA MONTAŻU I OBSŁUGI PRZENOŚNEGO PANELU KONTROLUJĄCEGO
 INSTRUKCJA MONTAŻU I OBSŁUGI PRZENOŚNEGO PANELU KONTROLUJĄCEGO Kompletny panel kontrolny składa się z przenośnego monitora, 3 baterii, stojaka oraz nadajnika (płytki). 1. INSTALACJA PRZENOŚNEGO PANELU
INSTRUKCJA MONTAŻU I OBSŁUGI PRZENOŚNEGO PANELU KONTROLUJĄCEGO Kompletny panel kontrolny składa się z przenośnego monitora, 3 baterii, stojaka oraz nadajnika (płytki). 1. INSTALACJA PRZENOŚNEGO PANELU
Talent in Innovation. Innovation in Talent. Seria Myślenie Techniczne
 Talent in Innovation. Innovation in Talent. Seria Myślenie Techniczne Seria Myślenie Techniczne Testy z Serii Myślenie Techniczne (TS) znajdują zastosowanie zarówno przy rekrutacji zewnętrznych kandydatów
Talent in Innovation. Innovation in Talent. Seria Myślenie Techniczne Seria Myślenie Techniczne Testy z Serii Myślenie Techniczne (TS) znajdują zastosowanie zarówno przy rekrutacji zewnętrznych kandydatów
1 Moduł Inteligentnego Głośnika 3
 Spis treści 1 Moduł Inteligentnego Głośnika 3 1.1 Konfigurowanie Modułu Inteligentnego Głośnika........... 3 1.1.1 Lista elementów Modułu Inteligentnego Głośnika....... 3 1.1.2 Konfigurowanie elementu
Spis treści 1 Moduł Inteligentnego Głośnika 3 1.1 Konfigurowanie Modułu Inteligentnego Głośnika........... 3 1.1.1 Lista elementów Modułu Inteligentnego Głośnika....... 3 1.1.2 Konfigurowanie elementu
Programowanie w języku C++ Grażyna Koba
 Programowanie w języku C++ Grażyna Koba Kilka definicji: Program komputerowy to ciąg instrukcji języka programowania, realizujący dany algorytm. Język programowania to zbiór określonych instrukcji i zasad
Programowanie w języku C++ Grażyna Koba Kilka definicji: Program komputerowy to ciąg instrukcji języka programowania, realizujący dany algorytm. Język programowania to zbiór określonych instrukcji i zasad
Podręczna pomoc Microsoft Power Point 2007
 Podręczna pomoc Microsoft Power Point 2007 Animacja (przejście) slajdu... 2 Wybór przejścia slajdu... 2 Ustawienie dźwięku dla przejścia... 3 Ustawienie szybkości przejścia slajdu... 4 Sposób przełączenia
Podręczna pomoc Microsoft Power Point 2007 Animacja (przejście) slajdu... 2 Wybór przejścia slajdu... 2 Ustawienie dźwięku dla przejścia... 3 Ustawienie szybkości przejścia slajdu... 4 Sposób przełączenia
Statyczne badanie przerzutników - ćwiczenie 3
 Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Ćwiczenie nr 2 - Rysowanie precyzyjne
 Ćwiczenie nr 2 - Rysowanie precyzyjne Materiały do kursu Skrypt CAD AutoCAD 2D strony: 37-46. Wprowadzenie Projektowanie wymaga budowania modelu geometrycznego zgodnie z określonymi wymiarami, a to narzuca
Ćwiczenie nr 2 - Rysowanie precyzyjne Materiały do kursu Skrypt CAD AutoCAD 2D strony: 37-46. Wprowadzenie Projektowanie wymaga budowania modelu geometrycznego zgodnie z określonymi wymiarami, a to narzuca
Skanowanie OCR w aplikacji Kancelaria Komornika. Instrukcja dla użytkownika
 Skanowanie OCR w aplikacji Kancelaria Komornika Instrukcja dla użytkownika Spis treści 1. Zakładka Wyrażenia... 3 2. Zakładka Grupy wyrażeń... 5 3. Opcje Skanowania / OCR... 7 4. Rozpoznawanie Danych...
Skanowanie OCR w aplikacji Kancelaria Komornika Instrukcja dla użytkownika Spis treści 1. Zakładka Wyrażenia... 3 2. Zakładka Grupy wyrażeń... 5 3. Opcje Skanowania / OCR... 7 4. Rozpoznawanie Danych...
Zastosowanie zmiennej globalnej do sterowania animacją interaktywną. Flash MX 2004
 Zastosowanie zmiennej globalnej do sterowania animacją interaktywną. Flash MX 2004 Akademia Sztuk Pięknych w Łodzi Wydział Grafiki i Malarstwa Katedra Projektowania Graficznego Jakub Balicki V 2005r. 1)
Zastosowanie zmiennej globalnej do sterowania animacją interaktywną. Flash MX 2004 Akademia Sztuk Pięknych w Łodzi Wydział Grafiki i Malarstwa Katedra Projektowania Graficznego Jakub Balicki V 2005r. 1)
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 Projekt graficzny z metamorfozą (ćwiczenie dla grup I i II modułowych) Otwórz nowy rysunek. Ustal rozmiar arkusza na A4. Z przybornika wybierz rysowanie elipsy (1). Narysuj okrąg i nadaj mu średnicę 100
Projekt graficzny z metamorfozą (ćwiczenie dla grup I i II modułowych) Otwórz nowy rysunek. Ustal rozmiar arkusza na A4. Z przybornika wybierz rysowanie elipsy (1). Narysuj okrąg i nadaj mu średnicę 100
Program V-SIM tworzenie plików video z przebiegu symulacji
 Program V-SIM tworzenie plików video z przebiegu symulacji 1. Wprowadzenie Coraz częściej zdarza się, że zleceniodawca opinii prosi o dołączenie do opracowania pliku/ów Video z zarejestrowanym przebiegiem
Program V-SIM tworzenie plików video z przebiegu symulacji 1. Wprowadzenie Coraz częściej zdarza się, że zleceniodawca opinii prosi o dołączenie do opracowania pliku/ów Video z zarejestrowanym przebiegiem
ALGORYTMY. 1. Podstawowe definicje Schemat blokowy
 ALGORYTMY 1. Podstawowe definicje Algorytm (definicja nieformalna) to sposób postępowania (przepis) umożliwiający rozwiązanie określonego zadania (klasy zadań), podany w postaci skończonego zestawu czynności
ALGORYTMY 1. Podstawowe definicje Algorytm (definicja nieformalna) to sposób postępowania (przepis) umożliwiający rozwiązanie określonego zadania (klasy zadań), podany w postaci skończonego zestawu czynności
Konfiguracja i podłączenie sterownika Horner APG do oprogramowania Cscape po RS232
 Konfiguracja i podłączenie sterownika Horner APG do oprogramowania Cscape po RS232 Na przykładzie sterownika XLe SPIS TREŚCI Przygotowanie kabla łączącego sterownik z komputerem... 2 Konfiguracja ustawień
Konfiguracja i podłączenie sterownika Horner APG do oprogramowania Cscape po RS232 Na przykładzie sterownika XLe SPIS TREŚCI Przygotowanie kabla łączącego sterownik z komputerem... 2 Konfiguracja ustawień
Tablice (jedno i wielowymiarowe), łańcuchy znaków
, łańcuchy znaków") Tablice (jedno i wielowymiarowe), łańcuchy znaków wer. 8 z drobnymi modyfikacjami! Wojciech Myszka Katedra Mechaniki i Inżynierii Materiałowej 2017-04-07 09:35:32 +0200 Zmienne Przypomnienie/podsumowanie
Tablice (jedno i wielowymiarowe), łańcuchy znaków wer. 8 z drobnymi modyfikacjami! Wojciech Myszka Katedra Mechaniki i Inżynierii Materiałowej 2017-04-07 09:35:32 +0200 Zmienne Przypomnienie/podsumowanie
INSTRUKCJA OBSŁUGI. Sterownik bateryjny EZ 2040 (z zaworem elektromagnetycznym 1 )
") INSTRUKCJA OBSŁUGI Sterownik bateryjny EZ 2040 (z zaworem elektromagnetycznym 1 ) Programator czasowy EZ 2040 jest prostym urządzeniem słuŝącym do czasowego sterowania nawadnianiem prowadzonym na duŝych
INSTRUKCJA OBSŁUGI Sterownik bateryjny EZ 2040 (z zaworem elektromagnetycznym 1 ) Programator czasowy EZ 2040 jest prostym urządzeniem słuŝącym do czasowego sterowania nawadnianiem prowadzonym na duŝych
TWORZENIE OBIEKTÓW GRAFICZNYCH
 R O Z D Z I A Ł 2 TWORZENIE OBIEKTÓW GRAFICZNYCH Rozdział ten poświęcony będzie dokładnemu wyjaśnieniu, w jaki sposób działają polecenia służące do rysowania różnych obiektów oraz jak z nich korzystać.
R O Z D Z I A Ł 2 TWORZENIE OBIEKTÓW GRAFICZNYCH Rozdział ten poświęcony będzie dokładnemu wyjaśnieniu, w jaki sposób działają polecenia służące do rysowania różnych obiektów oraz jak z nich korzystać.
Sterownik Visilogic V260
 Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Obsługa programu Soldis
 Obsługa programu Soldis Uruchomienie programu Po uruchomieniu, program zapyta o licencję. Można wybrać licencję studencką (trzeba założyć konto na serwerach soldisa) lub pracować bez licencji. Pliki utworzone
Obsługa programu Soldis Uruchomienie programu Po uruchomieniu, program zapyta o licencję. Można wybrać licencję studencką (trzeba założyć konto na serwerach soldisa) lub pracować bez licencji. Pliki utworzone
Kurs Projektowanie i programowanie z Distributed Safety. Spis treści. Dzień 1. I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212)
") Spis treści Dzień 1 I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212) I-3 Cel stosowania bezpieczeństwa funkcjonalnego I-4 Bezpieczeństwo funkcjonalne I-5 Zakres aplikacji I-6 Standardy w zakresie
Spis treści Dzień 1 I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212) I-3 Cel stosowania bezpieczeństwa funkcjonalnego I-4 Bezpieczeństwo funkcjonalne I-5 Zakres aplikacji I-6 Standardy w zakresie
Siemens S7-1200 Konfiguracja regulatora PID
 Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Rys.1. Technika zestawiania części za pomocą polecenia WSTAWIAJĄCE (insert)
") Procesy i techniki produkcyjne Wydział Mechaniczny Ćwiczenie 3 (2) CAD/CAM Zasady budowy bibliotek parametrycznych Cel ćwiczenia: Celem tego zestawu ćwiczeń 3.1, 3.2 jest opanowanie techniki budowy i wykorzystania
Procesy i techniki produkcyjne Wydział Mechaniczny Ćwiczenie 3 (2) CAD/CAM Zasady budowy bibliotek parametrycznych Cel ćwiczenia: Celem tego zestawu ćwiczeń 3.1, 3.2 jest opanowanie techniki budowy i wykorzystania
Rysowanie istniejącego profilu
 BeStCAD - Moduł STAL 1 Rysowanie istniejącego profilu Rysuje przekrój poprzeczny lub widoki boczne pozycji istniejącej na rysunku. Ikona: Polecenie: STI Menu: Stal Rysuj istniejący Polecenie służy do rysowania
BeStCAD - Moduł STAL 1 Rysowanie istniejącego profilu Rysuje przekrój poprzeczny lub widoki boczne pozycji istniejącej na rysunku. Ikona: Polecenie: STI Menu: Stal Rysuj istniejący Polecenie służy do rysowania
Wykład 9. Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego:
 Serwonapędy w automatyce i robotyce Wykład 9 Piotr Sauer Katedra Sterowania i Inżynierii Systemów przełączających Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego: intuicyjna
Serwonapędy w automatyce i robotyce Wykład 9 Piotr Sauer Katedra Sterowania i Inżynierii Systemów przełączających Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego: intuicyjna
SERWER AKTUALIZACJI UpServ
 Wersja 1.12 upserv_pl 11/16 SERWER AKTUALIZACJI UpServ SATEL sp. z o.o. ul. Budowlanych 66 80-298 Gdańsk POLSKA tel. 58 320 94 00 serwis 58 320 94 30 dz. techn. 58 320 94 20; 604 166 075 www.satel.pl SATEL
Wersja 1.12 upserv_pl 11/16 SERWER AKTUALIZACJI UpServ SATEL sp. z o.o. ul. Budowlanych 66 80-298 Gdańsk POLSKA tel. 58 320 94 00 serwis 58 320 94 30 dz. techn. 58 320 94 20; 604 166 075 www.satel.pl SATEL
WPROWADZENIE DO ŚRODOWISKA SCICOS
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki WPROWADZENIE DO ŚRODOWISKA SCICOS Materiały pomocnicze do ćwiczeń laboratoryjnych Oryginał: Modeling and Simulation in Scilab/Scicos Stephen L.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki WPROWADZENIE DO ŚRODOWISKA SCICOS Materiały pomocnicze do ćwiczeń laboratoryjnych Oryginał: Modeling and Simulation in Scilab/Scicos Stephen L.
SERWER AKTUALIZACJI UpServ
 Wersja 1.11 upserv_pl 06/16 SERWER AKTUALIZACJI UpServ SATEL sp. z o.o. ul. Budowlanych 66 80-298 Gdańsk POLSKA tel. 58 320 94 00 serwis 58 320 94 30 dz. techn. 58 320 94 20; 604 166 075 www.satel.pl SATEL
Wersja 1.11 upserv_pl 06/16 SERWER AKTUALIZACJI UpServ SATEL sp. z o.o. ul. Budowlanych 66 80-298 Gdańsk POLSKA tel. 58 320 94 00 serwis 58 320 94 30 dz. techn. 58 320 94 20; 604 166 075 www.satel.pl SATEL
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie
 TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
Cyfrowe Przetwarzanie Obrazów i Sygnałów
 Cyfrowe Przetwarzanie Obrazów i Sygnałów Laboratorium EX0 Wprowadzenie Joanna Ratajczak, Wrocław, 2018 1 Cel i zakres ćwiczenia Celem ćwiczenia jest zapoznanie się ze środowiskiem Matlab/Simulink wraz
Cyfrowe Przetwarzanie Obrazów i Sygnałów Laboratorium EX0 Wprowadzenie Joanna Ratajczak, Wrocław, 2018 1 Cel i zakres ćwiczenia Celem ćwiczenia jest zapoznanie się ze środowiskiem Matlab/Simulink wraz
Zadanie egzaminacyjne E18 Nr zad 01
 Zada egzaminacyjne E18 Nr zad 01 Po roku eksploatacji nowatorskiego urządzenia mechatronicznego monitoring sygnalizuje zakłócenia w jego pracy. Okazało się, że które elementy uległy naturalnemu zużyciu.
Zada egzaminacyjne E18 Nr zad 01 Po roku eksploatacji nowatorskiego urządzenia mechatronicznego monitoring sygnalizuje zakłócenia w jego pracy. Okazało się, że które elementy uległy naturalnemu zużyciu.
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
INSTALACJA DOSTĘPU DO INTERNETU
 INSTALACJA DOSTĘPU DO INTERNETU Za pomocą protokołu PPPoE UWAGA: Niniejsza instrukcja dotyczy tylko przypadków połączeń kablowych oraz radiowych BEZ użycia routera domowego. W przypadku posiadania routera
INSTALACJA DOSTĘPU DO INTERNETU Za pomocą protokołu PPPoE UWAGA: Niniejsza instrukcja dotyczy tylko przypadków połączeń kablowych oraz radiowych BEZ użycia routera domowego. W przypadku posiadania routera
Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.19 Numer zadania: 01
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2019 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2019 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Ćwiczenia z S7-1200. Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP.
 Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2019 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
przedmiot kilka razy, wystarczy kliknąć przycisk Wyczaruj ostatni,
 Baltie Zadanie 1. Budowanie W trybie Budowanie wybuduj domek jak na rysunku. Przedmioty do wybudowania domku weź z banku 0. Zadanie 2. Czarowanie sterowanie i powtarzanie W trybie Czarowanie z pomocą czarodzieja
Baltie Zadanie 1. Budowanie W trybie Budowanie wybuduj domek jak na rysunku. Przedmioty do wybudowania domku weź z banku 0. Zadanie 2. Czarowanie sterowanie i powtarzanie W trybie Czarowanie z pomocą czarodzieja
Wprowadzenie do rysowania w 3D. Praca w środowisku 3D
 Wprowadzenie do rysowania w 3D 13 Praca w środowisku 3D Pierwszym krokiem niezbędnym do rozpoczęcia pracy w środowisku 3D programu AutoCad 2010 jest wybór odpowiedniego obszaru roboczego. Można tego dokonać
Wprowadzenie do rysowania w 3D 13 Praca w środowisku 3D Pierwszym krokiem niezbędnym do rozpoczęcia pracy w środowisku 3D programu AutoCad 2010 jest wybór odpowiedniego obszaru roboczego. Można tego dokonać
Tworzenie prostego programu w językach ST i LD
 Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Materiały dodatkowe. Konfiguracja sterownika programowalnego Siemens do obsługi protokołu MODBUS. Opracowali: mgr inż.
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Konfiguracja sterownika programowalnego Siemens do obsługi protokołu MODBUS Opracowali: mgr inż. Tomasz Karla Data: Luty, 2017 r. Dodatkowe informacje
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Konfiguracja sterownika programowalnego Siemens do obsługi protokołu MODBUS Opracowali: mgr inż. Tomasz Karla Data: Luty, 2017 r. Dodatkowe informacje
1.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych
 .Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
1. Otwórz pozycję Piston.iam
 1. Otwórz pozycję Piston.iam 2. Wybierz z drzewa wyboru poziomego Środowisko następnie Symulacja Dynamiczna 3. Wybierz Ustawienia Symulacji 4. W ustawieniach symulacji dynamicznej zaznacz: - Automatycznie
1. Otwórz pozycję Piston.iam 2. Wybierz z drzewa wyboru poziomego Środowisko następnie Symulacja Dynamiczna 3. Wybierz Ustawienia Symulacji 4. W ustawieniach symulacji dynamicznej zaznacz: - Automatycznie
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 CZĘŚĆ PISEMNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 26 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 26 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Konsola operatora TKombajn
 KANE Konsola operatora TKombajn INSTRUKCJA Arkadiusz Lewicki 15-12-2016 1 Spis treści Funkcje programu TKombajn... 2 Parametry rejestracji... 3 Aktywacja rejestracji warunkowej... 4 2 Funkcje programu
KANE Konsola operatora TKombajn INSTRUKCJA Arkadiusz Lewicki 15-12-2016 1 Spis treści Funkcje programu TKombajn... 2 Parametry rejestracji... 3 Aktywacja rejestracji warunkowej... 4 2 Funkcje programu
CoDeSys 3 programowanie w języku FBD
 Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
MIĘDZYNARODOWA NORMA IEC 61131
 Rozdział II MIĘDZYNARODOWA NORMA IEC 61131 2.1. Geneza powstania normy Przez lata rozwoju sterowników programowalnych producenci wprowadzali różne metody programowania sterowników PLC (Programmable Logic
Rozdział II MIĘDZYNARODOWA NORMA IEC 61131 2.1. Geneza powstania normy Przez lata rozwoju sterowników programowalnych producenci wprowadzali różne metody programowania sterowników PLC (Programmable Logic
Miernik Poziomu Cieczy MPC-1
 Gliwice 01.05.2008 44-100 Gliwice, ul. Portowa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl Fax./tel. (032) 238-20-31 0601-40-31-21 Miernik Poziomu Cieczy MPC-1 1. Przeznaczenie 2. Budowa. 3. Zasada
Gliwice 01.05.2008 44-100 Gliwice, ul. Portowa 21 NIP 631-020-75-37 e-mail: nivomer@poczta.onet.pl Fax./tel. (032) 238-20-31 0601-40-31-21 Miernik Poziomu Cieczy MPC-1 1. Przeznaczenie 2. Budowa. 3. Zasada
Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026"
 Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026" Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763-77-77 Fax: 032 763-75-94 v.1.2 www.mikster.pl mikster@mikster.pl (14.11.2007) SPIS
Dokumentacja sterownika mikroprocesorowego "MIKSTER MCC 026" Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763-77-77 Fax: 032 763-75-94 v.1.2 www.mikster.pl mikster@mikster.pl (14.11.2007) SPIS
Logowanie do aplikacji TETA Web. Instrukcja Użytkownika
 Logowanie do aplikacji TETA Web Instrukcja Użytkownika Spis treści 1 Wstęp... 2 1.1 O tym dokumencie... 2 1.2 Przyjęte oznaczenia... 2 1.3 Cel i zakres systemu... 2 1.4 Instalacja wtyczki Silverlight...
Logowanie do aplikacji TETA Web Instrukcja Użytkownika Spis treści 1 Wstęp... 2 1.1 O tym dokumencie... 2 1.2 Przyjęte oznaczenia... 2 1.3 Cel i zakres systemu... 2 1.4 Instalacja wtyczki Silverlight...