Projektowanie Układów Mechatronicznych
|
|
|
- Patryk Góra
- 6 lat temu
- Przeglądów:
Transkrypt
1 Projektowanie Układów Mechatronicznych Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki Białostockiej J. Wojnarowski: Wprowadzenie do mechatroniki. Wyd. PWSZ, Nowy Sącz, Devdas Shetty: Mechatronics System Design. PWS Publishing Company, Boston W. Bolton: Mechatronics. Longman, New York D. K. Miu: Mechatronics electromechanics and contromechanics. Springer- Verlag, New York 1993, 7. T. Uhl: Projektowanie mechatroniczne - zagadnienia wybrane, Wydawnictwo AGH, 2008.


2 Maszyna W znaczeniu technicznym maszyna jest to urządzenie (najczęściej złożone z wielu mechanizmów), służące do przekształcania energii lub wykonujące pracę mechaniczną, poprzez ruch swoich części. 3
3 4 Maszyna
4 Maszyna Mechanizm klasyczny: układ z jednym napędem => układ jednobieżny o jednym stopniu swobody W t = 1. q 1 (t) A x A (t) = f 1 (q 1 ) y A (t) = f 1 (q 1 ) j 20 (t) = f 2 (q 1 ) w 20 (t) = f 2 (q 1 ) 20 5

5 Maszyna 6



6 Maszyna i mechanizm Maszyna Mechanizm 2 W=1 Mechanizm 1 W=1... Mechanizm n W=1 7
 Wyprodukowany przez firmę UNIMATION założoną przez")

7 Roboty i manipulatory przemysłowe Unimate - pierwszy przemysłowy robot ( ) Wyprodukowany przez firmę UNIMATION założoną przez konstruktora George a Devola. Robot w roku 1961 został użyty przez General Motors do prac montażowych w fabryce w Ewing Township, New Jersey. 8

8 9 Manipulatory równoległe

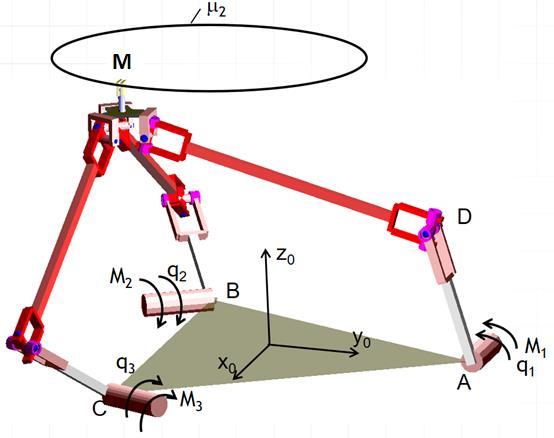
9 Manipulatory równoległe m 1 Punkt M(x M, y M, z M ) może przyjmować dowolne położenie w strefie roboczej. m 2 M Liczba stopni swobody W t = 3 q 3 (t) q 2 (t) q 1 (t) 10

10 Manipulatory równoległe planowanie trajektorii m 2 M D M 2 q 2 B z 0 C q 3 x 0 M 3 y 0 A M 1 q 1 11


11 12 Manipulatory równoległe układ sterowania

12 13


13 14 Mechatronika = Robotyka?

14 15 Mechatronika w pojazdach - wczoraj i dziś


15 Mechatronika w pojazdach - dzisiaj Układ hamulcowy Układ kierowniczy Silnik Zawieszenia kół 16



16 Mechatronika w pojazdach - w przyszłości Układ rozrządu mechaniczne sterowanie zaworami Mechatroniczny rozrząd: sterowanie zaworami by-wire 17

17 Mechatronika w pojazdach - w przyszłości Mechatroniczny rozrząd: sterowanie zaworami by-wire 18




18 Mechatronika w pojazdach - w przyszłości Mechaniczny układ kierowniczy ze wspomaganiem Mechatroniczny układ kierowniczy by-wire 19

19 Mechatronika w pojazdach - w przyszłości Mechatroniczny układ kierowniczy by-wire 20
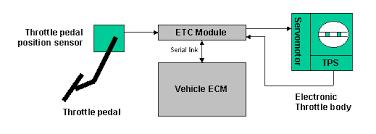



20 Mechatronika w pojazdach - jutro Mechatroniczny napęd przepustnicy by-wire 21




21 Mechatronika w pojazdach - w przyszłości Hydrauliczny układ hamulcowy z systemami ABS, ASR, ESP Mechatroniczny układ hamulcowy by-wire 22


22 Mechatronika w pojazdach - w przyszłości Adaptacyjne zawieszenie mechaniczne lub hydropneumatyczne Mechatroniczne adaptacyjne zawieszenie z predykcją przeszkód 23






23 Mechatronika w pojazdach - w przyszłości Tworzenie kanałów dla pojazdów uprzywilejowanych i informacja o niebezpiecznych sytuacjach Mobilne sieci komunikacyjne nawiązywane ad hoc Poprawianie płynności i natężenia ruchu Zgłaszanie wypadków Inteligentne skrzyżowania 24


24 Mechatronika wczoraj i dziś

25 Mechatronika wczoraj i dziś

26 Mechatronika wczoraj i dziś Mechatronika wczoraj i dziś
27 Powstawanie układów mechatronicznych - produkty oparte na czysto mechanicznej zasadzie działania - pojawianie się produktów, w których występują układy elektroniczne, ale nie mają wpływu na podstawowe działanie produktu np. samochód > radio, wyświetlacze elektroniczne, sterowniki klimatyzacji samolot ->radio, radar, wspomaganie, nawigacja
28 Powstawanie układów mechatronicznych - pojawianie się produktów w których układy elektroniczne są ściśle połączone z realizowanie podstawowych zadań np. samochód -> elektroniczny zapłon obrabiarka numeryczna -> sterownik robot -> sterownik
29 Układ Mechatroniczny Układ (system) mechatroniczny zbudowany jest z systemów częściowych: - systemu podstawowego mechanicznego - aktorów, - sensorów, - układu sterowania (procesory i oprogramowanie). System mechatroniczny rejestruje sygnały (sensory), przetwarza je (układ sterowania) i wydaje sygnały, które przetwarza w siły i ruchy (aktory), które poprzez układ mechaniczny wpływają na realizowany proces techniczny.







30 Rozwój systemów technicznych
31 Rozwój elektroniki komputer ENIAC 1947 tranzystor - Bell Telephone Lab sterowniki PLC w GM 1971 mikroprocesor video VHS JVC 1982 płyty CD 1997 płyty DVD 2002 płyty BlueRay (2008) HD-DVD 2006 TV HD w Polsce platforma N 2012 naziemna TV cyfrowa DVB (mpeg4)
32 Rozwój mikroprocesorów Intela 1971 intel 4004 (4 bitowy do kalkulatorów) 1972 intel 8008 (8 bitowy) 1974 intel 8080 (8 bitowy) 1978 intel 8088/8086 (16 bitowy) IBM PC 1982 intel IBM PC AT 1985 intel386 (32 bitowy) 1989 intel intel Pentium 1997 intel Pentium II 1999 intel Pentium III intel Pentium intel Dual Core
33 Powstawanie układów mechatronicznych Charakterystyka produktów uzyskanych na drodze projektowania mechatronicznego: - podstawowe funkcje można zrealizować tylko przez współdziałanie komponentów mechanicznych, elektronicznych i informatycznych, - występuje w tych układach przemieszczenie funkcji z mechaniki w kierunku, elektroniki i przetwarzania informacji, - właściwości takich produktów są w dużej mierze określone przez elementy niematerialne (oprogramowanie)



34 Powstawanie układów mechatronicznych Przyczyny rozwoju mechatroniki: - zastosowanie układów półprzewodnikowych (tranzystory, diody...) zamiast układów lampowych, - opracowanie i rozwój układów scalonych,
35 Powstawanie układów mechatronicznych Przyczyny rozwoju mechatroniki cd.: - rozwój i zastosowanie w przetwarzaniu sygnałów technik cyfrowych, - powstanie układów programowalnych, - powstanie i rozwój technik mikroprocesorowych
36 Powstawanie mechatroniki 1969 pojęcie MECHATRONICS zostało zdefiniowane przez firmę Yasakwa Electric Corporation chronione jako nazwa handlowa 1982 dostępne dla wszystkich 1987 mechanotronika pierwsza polska próba definicji MECHAnika+elekTRONIKA 1995 przyjęcie oficjalnej definicji Komisji Unii Europejskiej 2006/7 utworzenie kierunku studiów mechatronika
37 Mechatronika - definicje 1 Integracja naturalnie różnych systemów konstrukcyjnych: mechanizmów, obwodów elektrycznych i oprogramowania. Ta konieczność integracji jest jasno widoczna w robotach. [ISHII 1983] 2. Zastosowanie mikroelektroniki w inżynierii mechanicznej. [Oryginalna definicja Japońskiego Ministerstwa Przemysłu i Handlu (MITI)] 3. System, w którym rozwinięty ruch i rozwinięte sterowanie łączone są systematycznie w celu otrzymania systemu o wysokiej wartości, który może wykonywać rozwinięte funkcje zamierzone. [KAJITANI 1986] 4. Interdyscyplinarny obszar nauk inżynierskich, który wspiera się na klasycznych dyscyplinach budowy maszyn, elektrotechniki i informatyki. Typowy system mechatroniczny odbiera sygnały, przetwarza je i wydaje sygnały, które z kolei przetwarza np. w siły i ruchy. [SCHWEITZER 1989] 5. Programowalne urządzenia i systemy mechaniczne z sensoryka, aktoryką i komunikacją. [HANSON 1994]
38 Mechatronika - definicje 5. Synergiczna integracja inżynierii mechanicznej z elektroniką i inteligentnym sterowaniem komputerowym w projektowaniu i wytwarzaniu produktów i procesów. [komisja Wspólnoty Europejskiej, wg KING 1995] 6. Projektowanie i wytwarzanie produktów i systemów wykazujących zarówno funkcjonalność mechaniczną jak i zintegrowane sterowanie algorytmiczne. [HEWIT 1995, KING 1995] 7. Projektowanie maszyn inteligentnych. [HEWIT 1995]
39 Mechatronika - definicje Synergiczna integracja inżynierii mechanicznej z elektroniką inteligentnym sterowaniem komputerowym (informatyką) w projektowaniu i wytwarzaniu produktów i procesów. Mechatronika jest interdyscyplinarna i obejmuje następujące dziedziny: - mechanikę (mechanikę techniczną, budowę maszyn, mechanikę precyzyjną) - elektronikę/elektrotechnikę (mikroelektronikę, elektronikę siłową, technikę pomiarów, aktorykę) - informatykę (teorie systemów, przetwarzanie informacji, przetwarzanie danych procesowych, sztuczną inteligencję)
40 Mechatronika Synergiczna integracja inżynierii mechanicznej z elektroniką i inteligentnym sterowaniem komputerowym w projektowaniu i wytwarzaniu produktów i procesów [komisja Unii Europejskiej]. Mechanika Mechatronika Elektronika Informatyka 41

41 Ogólny model Mechatroniki
42 Zastosowania urządzeń mechatronicznych - zastępowanie konwencjonalnych urządzeń mechanicznych, - dołączanie elektronicznych urządzeń sterowniczych do maszyn konwencjonalnych, - tworzenie nowych rozwiązań układów mechatronicznych,

43 Układy mechatroniczne - przykłady Układ mechaniczny i mechatroniczny


44 Układy mechatroniczne - przykłady Waga klasyczna i elektroniczna
45 Układy mechatroniczne - przykłady Układy poziomowania wody
46 Mechatronika - nauka uczy jak integrować urządzenia mechaniczne ze sterowanie komputerowym zajmuje się badaniem i rozwojem nowych systemów mechaniczno-elektronicznych cechujących się pewnym stopniem inteligencji możliwość rozstrzygania uczy projektowania zespołowego
47 Mechatronika - projektowanie Klasyczny sposób projektowania szeregowy. Projektowanie w ujęciu mechatronicznym zespołowe, równoległe.
48 Mechatronika obszar zastosowania produkty techniczne (zegarki, komputery, telefony, agd, rtv, samochody, samoloty,...) urządzenie wytwórcze (obrabiarki numeryczne, roboty, systemy wytwórcze, systemy magazynowe,...) zespoły i elementy maszyn (sensory, silniki, elektryczne, elementy pomiarowe, wyświetlacze,...)
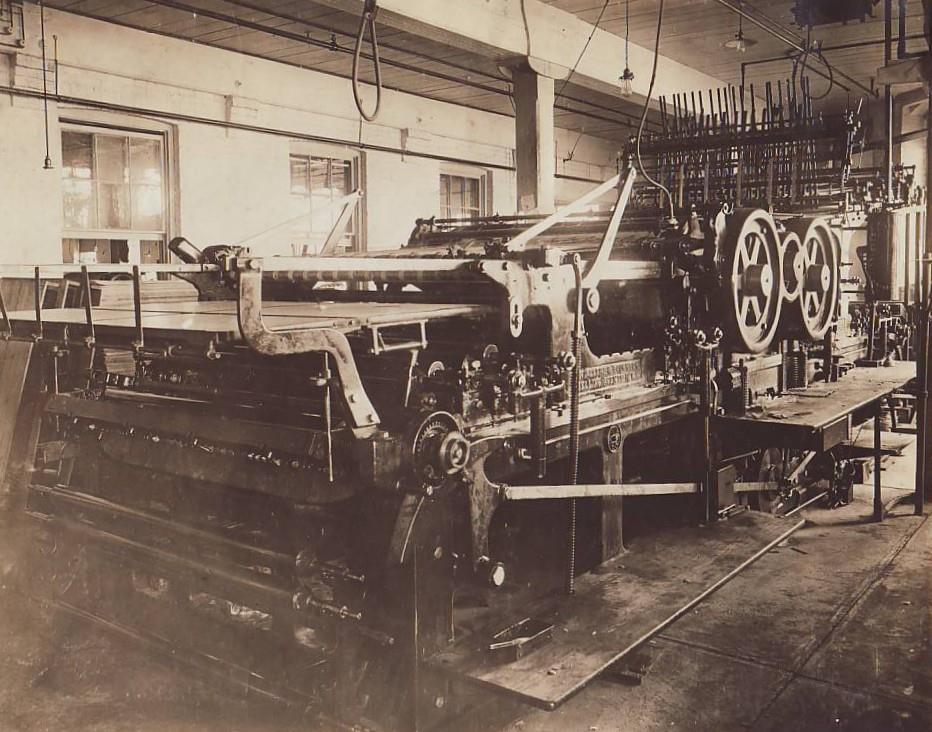
49 Powody stosowania układów meechatronicznych w maszynach 1) Poszerzenie charakterystyk (konstrukcja mech. bez zmian nowe sterowanie lepsza wydajność dokładność, szybkość, elastyczność, niezawodność np. silnik samochodowy) 2) Uproszczenie złożonych mechanizmów (modułowy układ mechatron. zastępuje kilka złożonych mechanizmów - np. obrabiarka numeryczna, maszyny offsetowe drukarskie,...) 3) Inowacyjność (możliwość tworzenia układów, które bez elektroniki byłyby niemożliwe układy analizy wizji, sztuczna inteligencja...)




50 Pozatechniczna rola Mechatroniki Moda jako przyczyna rozwoju mechatroniki Rozwój potrzeb konsumenckich wideo, kamery, pralki automatyczne,... Konkurencja na rynku potrzeba ciągle nowych produktów
Podstawy Mechatroniki Literatura
 Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
Problemy mechatronicznego podejścia do projektowania
 Probemy mechatronicznego podejścia do projektowania Podnośniki z odmiennymi sposobami reaizacji ruchu Rozwiązanie a: konstrukcja zwarta duży zasięg współrzędne zadania xy współrzędne sterowania (napędów)
Probemy mechatronicznego podejścia do projektowania Podnośniki z odmiennymi sposobami reaizacji ruchu Rozwiązanie a: konstrukcja zwarta duży zasięg współrzędne zadania xy współrzędne sterowania (napędów)
Mechatronika i szybkie prototypowanie układów sterowania
 Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
PROJEKTOWANIE MECHATRONICZNE
 Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok
 Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny mgr Ireneusz Podolski MECHATRONIKA
 Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny mgr Ireneusz Podolski MECHATRONIKA WPROWADZENIE Produkt mechatroniczny lub system mechatroniczny: Integracja komponentów mechanicznych,
Państwowa Wyższa Szkoła Zawodowa w Głogowie Instytut Politechniczny mgr Ireneusz Podolski MECHATRONIKA WPROWADZENIE Produkt mechatroniczny lub system mechatroniczny: Integracja komponentów mechanicznych,
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
nr projektu w Politechnice Śląskiej 11/030/FSD18/0222 KARTA PRZEDMIOTU
 Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne. laboratoryjne projektowe.
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Studia niestacjonarne inżynierskie
 Studia niestacjonarne inżynierskie") Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 3 36 18 18 0 0 0 18 18 6 3W
Załącznik nr 9b Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 1W Matematyka 1 4 72 36 36 0 0 0 18 18 6 18 18 6 2W Fizyka 1 3 36 18 18 0 0 0 18 18 6 3W
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Studia stacjonarne inżynierskie
 Studia stacjonarne inżynierskie") Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30
Załącznik nr 9a Plan studiów dla kierunku: ELEKTROTECHNIKA (1/6) Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 W C L S P ECTS 1W Matematyka 1 4 120 60 60 0 0 0 30 30 6 30 30 6 2W Fizyka 1 3 90 30 30 30
TECHNIK MECHATRONIK. Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne
 TECHNIK MECHATRONIK Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne Mechatronika to nauka istniejąca na styku kilku innych dziedzin wiedzy: mechaniki, elektroniki, informatyki, elektrotechniki,
TECHNIK MECHATRONIK Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne Mechatronika to nauka istniejąca na styku kilku innych dziedzin wiedzy: mechaniki, elektroniki, informatyki, elektrotechniki,
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika MECHATRONIKA TECHNICZNA Technical mechatronics Forma studiów: stacjonarne Kod przedmiotu: A01 Rodzaj przedmiotu: obowiązkowy na kierunku: Mechatronika Rodzaj zajęd:
Nazwa przedmiotu: Kierunek: Mechatronika MECHATRONIKA TECHNICZNA Technical mechatronics Forma studiów: stacjonarne Kod przedmiotu: A01 Rodzaj przedmiotu: obowiązkowy na kierunku: Mechatronika Rodzaj zajęd:
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr 1 Fizyka
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy: Polski Semestr 1 Fizyka
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2014/2015 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2014/2015 Język wykładowy:
2012/2013. PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki
 PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2012/2013 Opole, styczeń 2013 r. Tekst jednolity po zmianach
PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2012/2013 Opole, styczeń 2013 r. Tekst jednolity po zmianach
Podstawy mechatroniki Mechatronics basic
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2018/2019 WYDZIAŁ MECHANICZNY
 WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
HARMONOGRAM EGZAMINÓW
 Kierunek: MECHANIKA I BUDOWA MASZYN - studia I stopnia Materiałoznawstwo Analiza matematyczna Termodynamika techniczna 2 Cały rok Mechanika II Wytrzymałość materiałów Spawalnictwo Technologia spawania
Kierunek: MECHANIKA I BUDOWA MASZYN - studia I stopnia Materiałoznawstwo Analiza matematyczna Termodynamika techniczna 2 Cały rok Mechanika II Wytrzymałość materiałów Spawalnictwo Technologia spawania
Wymiar godzin Pkt Kod Nazwa przedmiotu Egz.
 PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
Kierunki i specjalności studiów niestacjonarnych 2017/2018
 Kierunki i specjalności studiów niestacjonarnych 2017/2018 Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez specjalności Bez specjalności
Kierunki i specjalności studiów niestacjonarnych 2017/2018 Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez specjalności Bez specjalności
Oferta edukacyjna Uniwersytetu Rzeszowskiego. www.mechatronika.univ.rzeszow.pl
 Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
SPECJALNOŚĆ ELEKTRONIKA PRZEMYSŁOWA
 SPECJALNOŚĆ W RAMACH STUDIÓW STACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Sterowania i Elektroniki Przemysłowej Zakład Elektroniki Przemysłowej
SPECJALNOŚĆ W RAMACH STUDIÓW STACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Sterowania i Elektroniki Przemysłowej Zakład Elektroniki Przemysłowej
HARMONOGRAM EGZAMINÓW - rok akademicki 2015/ semestr zimowy. Kierunek ENERGETYKA - studia inżynierskie środa
 Kierunek ENERGETYKA - studia inżynierskie 1 Analiza matematyczna Materiałoznawstwo 2 Termodynamika Wytrzymałość materiałów Gospodarka energetyczna Technologie energetyczne III Spalanie paliw stałych, ciekłych
Kierunek ENERGETYKA - studia inżynierskie 1 Analiza matematyczna Materiałoznawstwo 2 Termodynamika Wytrzymałość materiałów Gospodarka energetyczna Technologie energetyczne III Spalanie paliw stałych, ciekłych
SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE
 PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
 Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
WYDZIAŁ MECHANICZNY. Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2018/2019
 WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
WYDZIAŁ MECHANICZNY Kandydat powinien posiadać umiejętności z języka obcego na poziomie B2 Europejskiego Systemu Opisu Kształcenia Językowego, pozwalające mu na czynne uczestnictwo w wybranych zajęciach
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
SŁAWOMIR WIAK (redakcja)
") SŁAWOMIR WIAK (redakcja) Akademicka Oficyna Wydawnicza EXIT Recenzenci: Prof. Janusz Turowski Politechnika Łódzka Prof. Ewa Napieralska Juszczak University Lille Nord de France, LSEE, UA, Francja Autorzy
SŁAWOMIR WIAK (redakcja) Akademicka Oficyna Wydawnicza EXIT Recenzenci: Prof. Janusz Turowski Politechnika Łódzka Prof. Ewa Napieralska Juszczak University Lille Nord de France, LSEE, UA, Francja Autorzy
Technik Mechatronik. Kliknij, aby dodać tekst
 Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Specjalność: Komputerowe systemy sterowania i diagnostyki. Strona 1 z 5
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Plan studiów kierunku MECHANIKA I BUDOWA MASZYN
 bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Automatyka i metrologia
 Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
4. Sylwetka absolwenta
 1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
1. Technik mechatronik to nowoczesny i przyszłościowy zawód związany z projektowaniem, montowaniem, programowaniem oraz ekspoloatacją urządzeń i systemów mechatronicznych z wykorzystaniem technik komputerowych
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na kierunku: Mechatronika Rodzaj zajęć: wykład, laboratorium PODSTAWY MECHATRONIKI Basis of mechatronics Forma studiów: stacjonarne
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na kierunku: Mechatronika Rodzaj zajęć: wykład, laboratorium PODSTAWY MECHATRONIKI Basis of mechatronics Forma studiów: stacjonarne
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Mechatronika. Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy:
 Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
PLAN STUDIÓW STACJONARNYCH STOPNIA I kierunek TRANSPORT - przedmioty wspólne
 - przedmioty wspólne 1 Język angielski * 1 1 2 1 2 1 2 1 E 2 2 2 Przedmiot humanistyczny I * 30 30 2 3 3 Przedmiot humanistyczny II * 30 30 2 2 Wychowanie fizyczne * 1 1 2 0 2 0 2 0 2 0 5 Matematyka 150
- przedmioty wspólne 1 Język angielski * 1 1 2 1 2 1 2 1 E 2 2 2 Przedmiot humanistyczny I * 30 30 2 3 3 Przedmiot humanistyczny II * 30 30 2 2 Wychowanie fizyczne * 1 1 2 0 2 0 2 0 2 0 5 Matematyka 150
WYDZIAŁY, KIERUNKI, POZIOMY, TRYBY STUDIOWANIA ORAZ SPECJALNOŚCI OFEROWANE NA STUDIACH NIESTACJONARNYCH
 WYDZIAŁY, KIERUNKI, POZIOMY, TRYBY STUDIOWANIA ORAZ SPECJALNOŚCI OFEROWANE NA STUDIACH NIESTACJONARNYCH I. STUDIA PROWADZONE W WARSZAWIE Wydział ADMINISTRACJI I NAUK SPOŁECZNYCH Kierunek Administracja
WYDZIAŁY, KIERUNKI, POZIOMY, TRYBY STUDIOWANIA ORAZ SPECJALNOŚCI OFEROWANE NA STUDIACH NIESTACJONARNYCH I. STUDIA PROWADZONE W WARSZAWIE Wydział ADMINISTRACJI I NAUK SPOŁECZNYCH Kierunek Administracja
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2016/2017 Język wykładowy:
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia
WYDZIAŁ MECHANICZNY. Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2017/2018
 WYDZIAŁ MECHANICZNY automatyka i robotyka energetyka inżynieria materiałowa inżynieria produkcji nie przewiduje się przeprowadzania rozmowy kwalifikacyjnej mechanika i budowa maszyn mechatronika transport
WYDZIAŁ MECHANICZNY automatyka i robotyka energetyka inżynieria materiałowa inżynieria produkcji nie przewiduje się przeprowadzania rozmowy kwalifikacyjnej mechanika i budowa maszyn mechatronika transport
PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia
semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: mechanika i budowa maszyn Semestr 1 /sem. 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Katedra Mikroelektroniki i Technik Informatycznych
 Katedra Mikroelektroniki i Technik Informatycznych Bloki obieralne na kierunku Mechatronika rok akademicki 2013/2014 ul. Wólczańska 221/223, budynek B18 www.dmcs.p.lodz.pl Nowa siedziba Katedry 2005 2006
Katedra Mikroelektroniki i Technik Informatycznych Bloki obieralne na kierunku Mechatronika rok akademicki 2013/2014 ul. Wólczańska 221/223, budynek B18 www.dmcs.p.lodz.pl Nowa siedziba Katedry 2005 2006
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. laboratoryjne projektowe.
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 17/18 Język wykładowy: Polski Semestr 1 Fizyka RAR-1-1-s
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 17/18 Język wykładowy: Polski Semestr 1 Fizyka RAR-1-1-s
Semestr I (limit 30) I. Przedmioty obowiązkowe (limit 30) Semestr II (limit 30) I. Przedmioty obowiązkowe (limit 30)
 I. Przedmioty obowiązkowe (limit 30) Semestr II (limit 30) I. Przedmioty obowiązkowe (limit 30)") OPIS PRZEDMIOTÓW ECTS DLA KIERUNKU AUTOMATYKA I ROBOTYKA SPECJALIZACJA: AUTOMATYKA PRZEMYSŁOWA FORMA STUDIÓW - STACJONARNE NABÓR 015-019 Semestr I (limit 30) 1 język angielski 30 z/o 09.1 technologia informacyjna
OPIS PRZEDMIOTÓW ECTS DLA KIERUNKU AUTOMATYKA I ROBOTYKA SPECJALIZACJA: AUTOMATYKA PRZEMYSŁOWA FORMA STUDIÓW - STACJONARNE NABÓR 015-019 Semestr I (limit 30) 1 język angielski 30 z/o 09.1 technologia informacyjna
Rok 1. sem. 1. sem. 2
 Nr kol. pkt ECTS. ECTS za zajęcia z ECTS za zajęcia praktyczne Godz. zajęć z ykładów ćwiczeń Uniwersytet armińsko-mazurski ydział Nauk Technicznych zatwierdzony decyzją R w dniu 6.6.213 r.213 r. P r o
Nr kol. pkt ECTS. ECTS za zajęcia z ECTS za zajęcia praktyczne Godz. zajęć z ykładów ćwiczeń Uniwersytet armińsko-mazurski ydział Nauk Technicznych zatwierdzony decyzją R w dniu 6.6.213 r.213 r. P r o
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność:
 Załącznik 3 Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność: Lp. Nazwa przedmiotu Liczba godzin w semestrze Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 E Z Σh
Załącznik 3 Plan studiów dla kierunku: ELEKTROTECHNIKA Studia stacjonarne inżynierskie Specjalność: Lp. Nazwa przedmiotu Liczba godzin w semestrze Ogółem Semestr 1 Semestr 2 Semestr 3 Semestr 4 E Z Σh
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka. semestralny wymiar godzin. Semestr 1. Semestr 2. Semestr 3.
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
KIERUNKI I SPECJALNOŚCI
 KIERUNKI I SPECJALNOŚCI STUDIA NIESTACJONARNE PROWADZONE W WARSZAWIE Administacji i Nauk Społecznych Kierunek ADMINISTRCAJA Czas trwania 6 semestrów 4 semestry Specjalności Bez specjalności Bez specjalności
KIERUNKI I SPECJALNOŚCI STUDIA NIESTACJONARNE PROWADZONE W WARSZAWIE Administacji i Nauk Społecznych Kierunek ADMINISTRCAJA Czas trwania 6 semestrów 4 semestry Specjalności Bez specjalności Bez specjalności
Tok Specjalność Semestr Z / L Blok Przedmiot
 ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
Oferta badawcza Politechniki Gdańskiej dla przedsiębiorstw
 KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
Plan studiów dla kierunku:
 Plan studiów dla kierunku: INFORMATYKA Specjalności: Bezpieczeństwo sieciowych systemów informatycznych, Informatyka techniczna, Technologie internetowe i techniki multimedialne Ogółem Semestr 1 Semestr
Plan studiów dla kierunku: INFORMATYKA Specjalności: Bezpieczeństwo sieciowych systemów informatycznych, Informatyka techniczna, Technologie internetowe i techniki multimedialne Ogółem Semestr 1 Semestr
Nazwa przedmiotu. 1 Matematyka. 2 Fizyka. 3 Informatyka. 4 Rysunek techniczny. 12 Język angielski. 14 Podstawy elektroniki. 15 Architektura komputerów
 Plan studiów dla kierunku: INFORMATYKA Specjalności: Bezpieczeństwo sieciowych systemów informatycznych, Informatyka techniczna, Technologie internetowe i techniki multimedialne E Z Σh W C L S P W C L
Plan studiów dla kierunku: INFORMATYKA Specjalności: Bezpieczeństwo sieciowych systemów informatycznych, Informatyka techniczna, Technologie internetowe i techniki multimedialne E Z Σh W C L S P W C L
Tabela odniesień efektów kierunkowych do efektów obszarowych
 Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika
Umiejscowienie kierunku w obszarze kształcenia Kierunek studiów automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika
Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2019/2020
 Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2019/2020 Kierunek Zakres rozmowy kwalifikacyjnej obejmuje: Advanced Mechanical Engineering (język
Zakres rozmów kwalifikacyjnych obowiązujących kandydatów na studia drugiego stopnia w roku akademickim 2019/2020 Kierunek Zakres rozmowy kwalifikacyjnej obejmuje: Advanced Mechanical Engineering (język
Nazwa przedmiotu. Załącznik nr 1 do Uchwały nr 70/2016/2017 Rady Wydziału Elektrycznego Politechniki Częstochowskiej z dnia r.
 Plan studiów dla kierunku: INFORMATYKA Specjalności: Bezpieczeństwo sieciowych systemów informatycznych, Informatyka techniczna, Technologie internetowe i techniki multimedialne Ogółem Semestr 1 Semestr
Plan studiów dla kierunku: INFORMATYKA Specjalności: Bezpieczeństwo sieciowych systemów informatycznych, Informatyka techniczna, Technologie internetowe i techniki multimedialne Ogółem Semestr 1 Semestr
Trochę o zawodach, w których kształcimy
 Trochę o zawodach, w których kształcimy TECHNIK ELEKTRYK Dział elektryczności jest bardzo szeroką i ciągle rozwijającą się dziedziną nauki, w której każdy może znaleźć obszar zgodny z własnym zainteresowaniem,
Trochę o zawodach, w których kształcimy TECHNIK ELEKTRYK Dział elektryczności jest bardzo szeroką i ciągle rozwijającą się dziedziną nauki, w której każdy może znaleźć obszar zgodny z własnym zainteresowaniem,
Informatyka- studia I-go stopnia
 SPECJALNOŚĆ: Informatyka w Zarządzaniu Obowiązuje od roku akademickiego: 2007 / 2008 1 Modelowanie procesów biznesowych 30 30 60 6 2 2 6 2 Eksploracja danych 30 3 1 1 3 3 Wspomaganie decyzji w warunkach
SPECJALNOŚĆ: Informatyka w Zarządzaniu Obowiązuje od roku akademickiego: 2007 / 2008 1 Modelowanie procesów biznesowych 30 30 60 6 2 2 6 2 Eksploracja danych 30 3 1 1 3 3 Wspomaganie decyzji w warunkach
Rok I, semestr I (zimowy)
") Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2012/2013 Rok I,
Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2012/2013 Rok I,
MECHATRONIKA według. ch!
 MECHATRONIKA według ch! Niniejsze opracowanie zostało przygotowane na potrzeby projektu: "Strategia Wolnych i Otwartych Implementacji jako innowacyjny model zainteresowania kierunkami informatyczno-technicznymi
MECHATRONIKA według ch! Niniejsze opracowanie zostało przygotowane na potrzeby projektu: "Strategia Wolnych i Otwartych Implementacji jako innowacyjny model zainteresowania kierunkami informatyczno-technicznymi
studia I stopnia, niestacjonarne rok akademicki 2017/2018 Elektrotechnika
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Elektrotechnika, niestacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Elektrotechnika Strona
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Elektrotechnika, niestacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Elektrotechnika Strona
studia I stopnia, stacjonarne rok akademicki 2017/2018 Elektrotechnika
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek, stacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Strona 1 z stacjonarne profil ogólnoakademicki
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek, stacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Strona 1 z stacjonarne profil ogólnoakademicki
Plan studiów dla kierunku: ELEKTRONIKA I TELEKOMUNIKACJA Załącznik nr 10 Studia stacjonarne inżynierskie Cyfrowe przetwarzanie sygnałów
 Kod Plan studiów dla kierunku: ELEKTRONIKA I TELEKOMUNIKACJA Załącznik nr 10 Studia stacjonarne inżynierskie Cyfrowe przetwarzanie sygnałów E Z Sh W C L S P W C L S P ECTS W C L S P ECTS W C L S P ECTS
Kod Plan studiów dla kierunku: ELEKTRONIKA I TELEKOMUNIKACJA Załącznik nr 10 Studia stacjonarne inżynierskie Cyfrowe przetwarzanie sygnałów E Z Sh W C L S P W C L S P ECTS W C L S P ECTS W C L S P ECTS
PLAN STUDIÓW NIESTACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy
 ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
PLAN STUDIÓW STACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy. I rok. Praktyka kierunkowa 6 Praktyka kierunkowa 6
 ODZ.DYDAKT. () PUNKTY 06.1-M-MiBM-S1-EP-000_09 Standard 1. ychowanie fizyczne 60 4 1 1. Język obcy I* 60 4 1 1 3. Język obcy II** 60 4 3 1 4. Informatyka 5 Bazy danych 1 1 6 Języki programowania 7 Matematyka
ODZ.DYDAKT. () PUNKTY 06.1-M-MiBM-S1-EP-000_09 Standard 1. ychowanie fizyczne 60 4 1 1. Język obcy I* 60 4 1 1 3. Język obcy II** 60 4 3 1 4. Informatyka 5 Bazy danych 1 1 6 Języki programowania 7 Matematyka
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 203/204 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 203/204 Język wykładowy:
PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki.
 PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2014/2015 Opole, marzec 2014 r. Tekst jednolity po zmianach
PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2014/2015 Opole, marzec 2014 r. Tekst jednolity po zmianach
DOKUMENTACJA PROGRAMU KSZTAŁCENIA DLA KIERUNKU STUDIÓW: MECHATRONIKA
 DOKUMENTACJA PROGRAMU KSZTAŁCENIA DLA KIERUNKU STUDIÓW: MECHATRONIKA Spis treści: 1. Ogólna charakterystyka prowadzonych studiów 2. Efekty kształcenia 3. Program studiów 4. Warunki realizacji programu
DOKUMENTACJA PROGRAMU KSZTAŁCENIA DLA KIERUNKU STUDIÓW: MECHATRONIKA Spis treści: 1. Ogólna charakterystyka prowadzonych studiów 2. Efekty kształcenia 3. Program studiów 4. Warunki realizacji programu
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 18/19 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 18/19 Język wykładowy:
Tabela odniesień efektów kierunkowych do efektów obszarowych
 Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
Pytania egzaminacyjne dla Kierunku Elektrotechnika. studia II stopnia stacjonarne i niestacjonarne
 A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
WEEIA Plan studiów stacjonarnych I stopnia (inŝynierskich)
") WEEIA Plan studiów stacjonarnych I stopnia (inŝynierskich) I II III IV V VI VII Przedmioty w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P Przedmioty ogólne Wstęp do
WEEIA Plan studiów stacjonarnych I stopnia (inŝynierskich) I II III IV V VI VII Przedmioty w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P Przedmioty ogólne Wstęp do
Uwagi wstępne, organizacja zajęć
 Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Systemy mechatroniczne - wykładowcy (2013) dr inż.
Jakub Wierciak Uwagi wstępne, Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Systemy mechatroniczne - wykładowcy (2013) dr inż.
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma studiów: Stacjonarne. audytoryjne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma studiów: Stacjonarne Rocznik: 2019/2020 Język wykładowy: Polski
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma studiów: Stacjonarne Rocznik: 2019/2020 Język wykładowy: Polski
Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2016/17
 Załącznik 1 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2016/17 Wydział Architektury architektura architektura architektura krajobrazu
Załącznik 1 Kierunki i specjalności na stacjonarnych studiach I i II stopnia stanowiące ofertę edukacyjną w roku akademickim 2016/17 Wydział Architektury architektura architektura architektura krajobrazu
Kierunki studiów prowadzone w Warszawie
 KIERUNKI I SPECJALNOŚCI STUDIÓW NIESTACJONARNYCH PIERWSZEGO I DRUGIEGO STOPNIA Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez
KIERUNKI I SPECJALNOŚCI STUDIÓW NIESTACJONARNYCH PIERWSZEGO I DRUGIEGO STOPNIA Kierunki studiów prowadzone w Warszawie Kierunek ADMINISTRCAJA Administacji i Nauk Społecznych 6 semestrów 4 semestry Bez
Rok I, semestr I (zimowy)
") Instytut Nauk Technicznych, PWSZ w Nysie Kierunek: Zarządzanie i Inżynieria Produkcji studia niestacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego
Instytut Nauk Technicznych, PWSZ w Nysie Kierunek: Zarządzanie i Inżynieria Produkcji studia niestacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego
Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Plan studiów niestacjonarnych I stopnia (inŝynierskich)
") Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Plan studiów niestacjonarnych I stopnia (inŝynierskich) I II III IV godzin w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r
Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Plan studiów niestacjonarnych I stopnia (inŝynierskich) I II III IV godzin w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r ć l p P w r
[1] [2] [3] [4] [5] [6] Wiedza
![[1] [2] [3] [4] [5] [6] Wiedza](/thumbs/99/139114042.jpg "[1] [2] [3] [4] [5] [6] Wiedza") Efekty dla studiów pierwszego stopnia profil ogólnoakademicki na kierunku Inżynieria Biomedyczna prowadzonym przez Wydział Elektroniki i Technik Informacyjnych Użyte w poniższej tabeli: 1) w kolumnie 4
Efekty dla studiów pierwszego stopnia profil ogólnoakademicki na kierunku Inżynieria Biomedyczna prowadzonym przez Wydział Elektroniki i Technik Informacyjnych Użyte w poniższej tabeli: 1) w kolumnie 4
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA
 PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek