Część 4. Działanie i sterowanie silników krokowych
|
|
|
- Justyna Zawadzka
- 5 lat temu
- Przeglądów:
Transkrypt
1 Część 4 Działanie i sterowanie silników krokowych
2 Porównanie silników różnych rodzajów Typ silnika Indukcyjne Krokowe Bezszczotkowe prądu stałego Prądu stałego szczotkowe Zalety Długa żywotność Wysoka moc Dokładność położenia wału Wysoki moment utrzymujący Długa żywotność Wysoka niezawodność Wysoka sprawność Niska cena Proste sterowanie prędkością Wady Wysoka cena Mały moment rozruchowy Niska prędkość Wymaga sterownika cyfrowego Wysoka cena Wymaga złożonego sterownika cyfrowego Koszt serwisu (szczotki) Ograniczona żywotność Typowe zastosowania Urządzenia AGD Windy Drukarki Urządzenia do obróbki mechanicznej Napędy dysków Pojazdy elektryczne Rozruszniki Zabawki i trenażery Niektóre urządzenia AGD Typowe sterowanie Jedno- lub wielofazowe AC Wielofazowe DC Wielofazowe DC Bezpośrednie PWM (DC) 2
3 Zalety silników krokowych Brak szczotek wyższa niezawodność Duży moment obrotowy przy niskich prędkościach W stanie spoczynku występuje moment podtrzymujący niezmienne położenie wału w silnikach o magnesie trwałym nawet bez zasilania uzwojeń Prędkość niezależna od obciążenia możliwe sterowanie prędkością w pętli otwartej większy niż dla silników prądu stałego o ile moment obciążający pozostaje mniejszy od znamionowego Położenie ściśle i dokładnie zależy od liczby impulsów możliwe sterowanie położeniem w pętli otwartej o ile prędkość pozostaje mniejsza od znamionowej 3



4 Ogólna zasada budowy i działania wirnik bieguny stojan fazy silnik o 2 biegunach i 2 fazach [Microchip, Introduction to Stepper Motors Part 1] 4


5 Budowa i krok silnika o magnesie trwałym Wirnik jest trwale namagnesowany Zmniejszenie kroku: zwiększenie liczby biegunów lub faz dodatkowo wirnik może składać się z sekcji wzdłużnych o biegunach przesuniętych względem siebie [Microchip, Introduction to Stepper Motors Part 1] 5


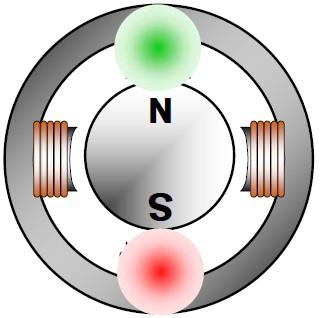
6 Działanie silnika o wirniku magnetycznym Zasada działania: przyciąganie biegunów magnetycznych Położenie wału zależy od tego, które z uzwojeń są wzbudzone i w którym kierunku [Microchip, Introduction to Stepper Motors Part 1] 6

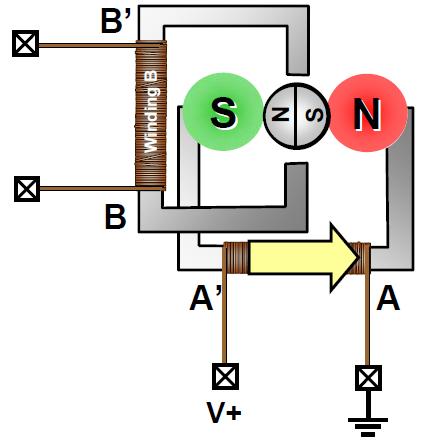

7 Silniki bipolarne [Microchip, Introduction to Stepper Motors Part 1] 7


8 Silniki unipolarne [Microchip, Introduction to Stepper Motors Part 1] 8

9 Bardziej realistyczna konstrukcja silnika o magnesie trwałym θ = 15 Bipolarne połączenie uzwojeń Unipolarne połączenie uzwojeń E, G = A, C F, H = B, D [Microchip, AN822] 9
 Minimum 3 fazy, maksimum (w praktyce) 5 Układ magnetyczny stojan-wirnik dąży do obniżenia swojej energii poprzez zmniejszenie")
10 Budowa i działanie silnika o zmiennej reluktancji Wirnik wykonany z ferromagnetyka miękkiego, tj. o niskim natężeniu koercji (zwykle żelazo wysoka indukcja nasycenia) Minimum 3 fazy, maksimum (w praktyce) 5 Układ magnetyczny stojan-wirnik dąży do obniżenia swojej energii poprzez zmniejszenie reluktancji obwodu magnetycznego Rm = ℓ / (µa) niska dla żelaza, wysoka dla powietrza; tym niższa, im krótszy obwód Krok zależy głównie od liczby zębów wirnika [Microchip, Introduction to Stepper Motors Part 1] 10



11 Kroki silnika o zmiennej reluktancji Ponieważ wirnik nie ma własnej biegunowości, kierunek pola stojana nie ma znaczenia może być jednobiegunowe [Microchip, Introduction to Stepper Motors Part 1] 11


12 Budowa silnika hybrydowego Wirnik stanowią dwa magnesy trwałe o przeciwnej biegunowości, z zębami przesuniętymi względem siebie o pół odległości [Microchip, Introduction to Stepper Motors Part 1] 12
13 Działanie i sterowanie silnika hybrydowego (1) [Microchip, Introduction to Stepper Motors Part 1] 13

14 Działanie i sterowanie silnika hybrydowego (2) θ = 1,8 [Microchip, Introduction to Stepper Motors Part 1] 14

15 Działanie i sterowanie silnika hybrydowego (3) Sposób wysterowania uzwojeń podobny do silnika bipolarnego stosowane są te same sterowniki [Microchip, Introduction to Stepper Motors Part 1] 15
16 Porównanie silników krokowych o różnej konstrukcji O zmiennej reluktancji Typ silnika O magnesie trwałym Hybrydowe Koszt Niski Umiarkowany Wysoki Konstrukcja Dość prosta Prosta Złożona Rozdzielczość 30 3 /step 1,8 /step 1,8 /step Moment w funkcji prędkości Użyteczny do 1000 pul/s Spadek dla dużych prędkości mniej znaczący Użyteczny do 5000 pul/s Poziom hałasu Niski, szczególnie dla sinusoidalnego prądu Zawsze wysoki Niski, szczególnie dla sinusoidalnego prądu Techniki pracy krokowej Pełnokrokowa, półkrokowa, mikrokrokowa Zwykle tylko pełnokrokowa Pełnokrokowa, półkrokowa, mikrokrokowa Moment spoczynkowy Obecny Nieobecny Obecny [Microchip, Introduction to Stepper Motors Part 1] 16
17 Porównanie momentu i mocy silnika unipolarnego i bipolarnego Silnik unipolarny, N liczba zwojów (połowa uzwojenia) Silnik bipolarny prąd płynie przez dwukrotnie więcej zwojów Dla jednakowej mocy strat Pd: Stąd moment Lepsze wykorzystanie miedzi w silniku bipolarnym przy tej samej mocy strat (przekroju uzwojenia) mniejszy I, większy T [ST, AN 235] 17
18 Parametry momentowe charakteryzujące silniki krokowe Moment spoczynkowy (detent torque) Moment utrzymujący (holding torque) maksymalny moment obciążający przyłożony do wału, przy którym spoczywający silnik może się zacząć natychmiast obracać z daną prędkością (lub obracający się zahamować) przy stałej częstotliwości impulsów (tj. bez stopniowego przyspieszania/spowalniania) bez pomijania kroków Moment obrotowy (pull-out torque) moment, jaki należy przyłożyć do spoczywającego wału, aby go poruszyć, kiedy uzwojenia są zasilone Moment wpadowy (pull-in torque) moment, jaki należy przyłożyć do spoczywającego wału, aby go poruszyć, kiedy uzwojenia nie są zasilone maksymalny moment obciążający przyłożony do wału, przy którym silnik będący w ruchu jest w stanie się obracać z określoną prędkością Żywotność silnika zależy od faktycznego momentu obciążającego w celu jego wydłużenia zaleca się pracę z obciążeniem 40 60% znamionowego 18
19 Momenty dynamiczne wpadowy i obrotowy Przy większym momencie obciążającym silnik będzie się ślizgać nie będzie się obracać (z prędkością wynikającą z impulsów) będzie się obracać (nie zatrzyma się), mimo iż nie powinien sterowanie w pętli otwartej zawiedzie, gdyż sterownik nie będzie znał faktycznego położenia wału Maleją ze wzrostem prędkości/częstotliwości moment wpadowy jest zawsze mniejszy od obrotowego moment wpadowy maleje ze wzrostem bezwładności obciążenia [Thomson Airpax Mechatronics, Stepper Motor Technology] 19
20 Rezonans Każdy silnik wykazuje szereg częstotliwości rezonansowych Antyrezonans objawiają się zarówno w dziedzinie mechanicznej, jak i elektromagnetycznej wywołuje skutki przeciwne do pożądanego ruchu wału silnika zwykle obserwowany przy małych prędkościach (~100 pps) przejawia się większymi wibracjami i poziomem hałasu siła zjawiska zależy od obciążenia wału W skrajnych przypadkach może prowadzić do pomijania kroków bardzo niekorzystne przy sterowaniu w pętli otwartej, gdyż położenie wału będzie inne niż oczekiwane tym gorsze skutki, im większy krok (najgorzej dla sterowania pełnokrokowego) i wyższa częstotliwość impulsów 20


21 Skutki rezonansu [Microchip, Introduction to Stepper Motors Part 2] 21

22 Techniki sterowania silnikiem krokowym w zależności od rozmiaru kroku pełnokrokowe półkrokowe mikrokrokowe [Microchip, Introduction to Stepper Motors Part 1] 22
23 Sterowanie pełnokrokowe jednofazowe (falowe) W każdej chwili zasilana jest 1 faza w jednym z 2 kierunków Silnik o 2 biegunach i 2 fazach θ = 360 /(2 2) = 90 A A B B [ST, AN 235; Microchip, Introduction to Stepper Motors Part 2] 23
24 Sterowanie pełnokrokowe dwufazowe Przy tym samym prądzie każdej z faz jak w sterowaniu jednofazowym moment większy 2 razy pole magnetyczne stanowi sumę wektorową 2 pól (od 2 faz), przesuniętych w przestrzeni o kąt 90 Kosztem 2 razy większego zużycia mocy elektrycznej (P I2) A A B B [ST, AN 235; Microchip, Introduction to Stepper Motors Part 2] 24
25 Sterowanie półkrokowe Połączenie dwóch poprzednich technik Dwukrotnie zwiększona rozdzielczość ( θ/2) Odmienny moment dla położeń pełnych i pośrednich może być wyrównany przez zwiększenie prądu 2 razy w tych odcinkach czasu, w których zasilana jest tylko 1 faza [ST, AN 235] 25
26 Sterowanie silników o więcej niż 2 biegunach Sekwencje impulsów identyczne jak przy 2 biegunach Sekwencja musi się powtórzyć kilka razy na każdy pełny obrót Zgodnie z liniami pola stojana ustawia się ta para biegunów, której kierunek pola jest najbliższy do nowego pola stojana Silnik o 2 fazach i 6 biegunach: 2 6=12 impulsów na obrót 2 2=4 impulsy w sekwencji sekwencja powtarza się 12/4=3 razy θ = 30 [Microchip, AN907] 26

27 Ogólna idea sterowanie silnika bipolarnego z mikrokontrolera Dla uproszczenia przyjmijmy, że sterownik wymaga 4 sygnałów, z których każdy wskazuje inną parę faza-zwrot napięcia [Microchip, Introduction to Stepper Motors Part 2] 27


28 Algorytm sterowania W tablicy przechowywane są stany wyjściowe portów niezbędne dla wywołania kolejnych kroków silnika Czasomierz wywołuje przerwania z określoną częstotliwością Na każdym przerwaniu zwiększany jest licznik, a do portu przekazywany jest kolejny zestaw stanów z tablicy [Microchip, Introduction to Stepper Motors Part 2] 28
29 Sterownik silnika unipolarnego 2 tranzystory na fazę NMOS sterowane względem masy Niezbędne diody zabezpieczające na wyłączanej połowie uzwojenia indukuje się przepięcie na niezasilonej połowie indukuje się napięcie jak na zasilonej: w stanie statycznym dodatnie, przy wyłączaniu ujemne dioda górna obcina do Vsupply i zapewnia ścieżkę dla zanikającego prądu dolna do 0 (ujemne napięcie przeniosłoby się do sterownika przez CGD) [Microchip, AN907] 29
30 Sterownik silnika bipolarnego Pełny mostek = 4 tranzystory na każdą fazę Górne tranzystory PMOS jeżeli niskie napięcie zasilania mostka do wyłączenia wymagany poziom wysoki A1, A2, D1, D2 = Vsupply do załączenia poziom 0 UGS = Vsupply NMOS konieczne przesunięcie poziomu do punktu środkowego ramienia dodatkowy tranzystor+r (powolne) albo para, albo układ bootstrap [Microchip, AN907] 30
 Załączenie dwóch w tym samym ramieniu zwarcie zasilania niedopuszczalne, niezbędny czas martwy [Microchip, Introduction to Stepper Motors Part")
31 Indywidualne sterowanie tranzystorami mostka Potrzeba 8 sygnałów Załączane parami w przeciwległych ramionach w celu zasilenia uzwojenia: górny-dolny w celu wyłączenia pola danej fazy: dolny-dolny (albo górny-górny) Załączenie dwóch w tym samym ramieniu zwarcie zasilania niedopuszczalne, niezbędny czas martwy [Microchip, Introduction to Stepper Motors Part 2] 31
32 Zapewnienie czasu martwego Zapobiega zwarciu podczas przełączania par tranzystorów wyłączenie tranzystora wymaga czasu, przez który nie można jeszcze załączyć drugiego tranzystora w danym ramieniu Realizacja w sterowniku bramkowym mostka (zwykle stałe) w dedykowanych modułach sprzętowych mikrokontrolera bezpośrednio w kodzie programu mikrokontrolera [Microchip, AN907] 32
33 Diody mostka Zapewniają ścieżkę dla prądu uzwojenia na czas wyłączenia tranzystorów kiedy prąd jest skierowany wstecznie względem załączonego tranzystora Diody zewnętrzne równolegle do diod podłożowych teoretycznie nie są potrzebne, ale podłożowe często nie oferują wystarczających parametrów (spadek potencjału, energia przełączania) [Microchip, AN907] 33
34 Sterowanie mostkiem przez standardowy sterownik bramkowy półmostka Bootstrap samoładujący się układ zasilania obwodów bramkowych tranzystorów górnych Cb doładowuje się do UGG w tym celu potencjał źródła musi być okresowo UGG dzieje się to samoczynnie, kiedy T jest wyłączony (ug = 0), gdyż url = 0 sterowniki (pół)mostka w miejscu RL dolny tranzystor, który jest załączony gdy wyłączony jest górny 34
35 Sterowanie silnikiem o zmiennej reluktancji 1 tranzystor na fazę, NMOS sterowany względem masy Dioda wymagana na czas wyłączania fazy zapewnia ścieżkę dla zanikającego prądu uzwojenia jednocześnie gaszą przepięcie indukowane na indukcyjności uzwojenia wskutek spadku prądu [Microchip, AN907] 35
36 Sterowanie mikrokrokowe Prąd danej fazy jest zmniejszany stopniowo wraz ze zwiększaniem prądu kolejnej fazy Realizacja przez modulację szerokości impulsów napięcia podawanego na uzwojenie Większa rozdzielczość i płynność obrotów stosuje się niezmienne funkcje modulujące tablice wartości częstotliwość musi być większa od częstotliwości impulsów sterujących położeniem silnika w praktyce do 32 razy (w stosunku do pracy pełnokrokowej) Ograniczenie hałasu Ograniczenie problemów wynikających z rezonansu 36
37 Techniki pracy mikrokrokowej Sterowanie sinusoidalne stały moment Współczynniki są obliczane raz i przechowywane w jednej tablicy, gdyż cos φ = sin (φ + 90 ) Sterowanie z maksymalizacją momentu moment większy, ale zmienny [Microchip, AN822, AN907] 37
38 Wpływ tarcia Dopiero nadwyżka momentu elektromagnetycznego ponad moment tarcia powoduje poruszenie wału występują obszary martwe (nie oznacza to braku momentu wypadkowego, gdyż moment generuje wówczas druga faza) mniejsze wartości momentu [Microchip, AN907] 38
39 Prąd i napięcie uzwojeń silnika krokowego Indukcyjność stosunkowo mała, ale nie pomijalna prąd może osiągnąć lub nie ustalone maksimum w ramach czasu trwania impulsów sterujących położeniem silnika Podstawowym parametrem znamionowym (dopuszczalnym) jest prąd napięcie nominalne to takie, przy którym prąd w stanie ustalonym osiągnie wartość znamionową napięcie nominalne może być przekroczone, o ile prąd znamionowy nie jest [Microchip, AN907] 39
40 Techniki skrócenia czasu narastania prądu Powolne narastanie prądu skutkuje tak samo powolnym narastaniem momentu Stałe zwiększenie napięcia skontrowane zwiększeniem rezystancji Zwiększenie napięcia tylko w fazie początkowej straty mocy w rezystorze V zmniejsza τ, ale R zwiększa brak opornika maksymalne zwiększenie szybkości narastania wymaga dwóch źródeł i przełącznika sterowanie ze sprzężeniem zwrotnym: konieczny czujnik prądu pętla otwarta: czas przełączenia oblicza się na podstawie równań teoretycznych Zwiększenie napięcia pozwala zwiększyć średni moment i prędkość [Microchip, AN907] 40
41 Sterowanie wartością prądu przez modulację szerokości impulsu Mowa o impulsach sterujących bramkami tranzystorów Napięcie zasilania wyższe od nominalnego Długość impulsów częstotliwość większa niż impulsów wysterowujących fazy silnika początkowo (załączenie danej fazy) duża aż do osiągnięcia Imax następnie taka, by uzyskać Uav = Unom, wówczas również prąd będzie tętnić w okolicy Imax Albo sterowanie prądowe tranzystor jest wyłączany, gdy wykryje się i > Imax [Microchip, AN907, AN822] 41
42 Prosty sterownik z przerywaczem ograniczającym prąd Dobór bocznika rezystancja jak najmniejsza ze względu na moc strat jednak musi zapewnić odpowiedni poziom sygnału (szumy, napięcie przesunięcia komparatora/wzmacniacza) Szumy i zaburzenia będą zakłócać komparator musi posiadać histerezę może być konieczna filtracja sygnału z bocznika [Microchip, AN907] 42

43 Sterowniki prądowe przekształtników impulsowych O stałej częstotliwości stały czas między kolejnymi załączeniami tranzystora O stałym czasie wyłączenia stały czas między wyłączeniem a kolejnym załączeniem częstotliwość będzie zmienna [ST, AN 235] 43
44 Szybkość opadania prądu w przerywaczu Opadanie szybkie prostsze przy sterowaniu mikrokrokowym w obu połówkach sinusoidy przełączają się te same tranzystory (ale aż 4) Opadanie powolne ogólnie korzystniejsze szybkość zależy od elektrycznej stałej czasowej silnika (L/R) mniejsze tętnienie prądu, gdyż mniejsza amplituda napięcia mniejsze straty mocy i moc sterowania przełączane tylko 2 tranzystory [ST, AN 235] 44
45 Proste sterowanie pełnokrokowe z jednoczesnym wysterowaniem jednej fazy [Microchip, AN822] 45
46 Proste sterowanie pełnokrokowe z jednoczesnym wysterowaniem dwóch faz [Microchip, AN822] 46
47 Proste sterowanie półkrokowe [Microchip, AN822] 47
48 Sterowanie mikrokrokowe unipolarne z mikrokontrolera W pętli otwartej prostszy układ napięcie zasilania równe nominalnemu albo odpowiednio przeskalowane współczynniki wypełnienia (np. Vsupply = 2Vnom Dmax = 0,5) Możliwe też w pętli zamkniętej wykorzystuje się ogranicznik prądu oparty o przerywacz, ale z sinusoidalnie zmiennym napięciem odniesienia (Vcontrol) [Microchip, AN907] 48
49 Sterownik mikrokrokowy bipolarny CTRL1, CTRL2 negowane w sterowniku bramkowym PMOS pozwala uniknąć przesuwnika poziomu wybór fazy i polaryzacji P1A sygnał PWM wypełnienie określa natężenie prądu D=100% przełączenie pinu w stan wysokiej impedancji, podciągnięcie do VSUPPLY przez R1 [Microchip, AN906] 49
50 Sygnały sterujące * Pin zostaje przełączony w stan wysokiej impedancji, a rezystor podciąga linię do zasilania. W stanach 0, 2, 4, 6 używana jest pierwsza połowa tablicy współczynnika wypełnienia (zmniejszające się wartości funkcji kosinus). W stanach 1, 3, 5, 7 używana jest druga połowa tablicy współczynnika wypełnienia (zwiększające się wartości funkcji kosinus). Tablica wartości funkcji sinus 8 punktów na ¼ okresu. Wartości 0 i 255 tj. 0% i 100% są osiągane na końcu/początku poprzedniego/następnego stanu) [Microchip, AN906] 50
51 Kompletny schemat elektryczny Winding 2 [Microchip, AN906] 51
52 Algorytm Sterowanie położeniem poprzez potencjometr itd. dla stanów 1-7 [Microchip, AN906] 52
53 Sterowanie prądem w pętli zamkniętej Wymaga wydajnego mikrokontrolera częstotliwość próbkowania przetwornika A/C szybkość obliczeń np. mnożarki sprzętowe sprzętowe moduły PWM nie trzeba przeliczać (D na cykle czasomierza itp.) [Microchip, DS01307] 53
54 Rozmiar kroku Krok zmienny od 1/1 do 1/64 powyżej 1/32 zwykle brak poprawy wydajności silnika można jednak osiągnąć obniżenie poziomu hałasu im mniejszy krok, tym szybsza wymagana reakcja U, L Wartości chwilowe oparte na funkcji sinus niezależnie od kroku przy dłuższym kroku wystarczy pomijać co 2., 4., 8. itd. próbkę [Microchip, DS01307] 54
55 Przebieg prądu przy sterowaniu falowym Prąd osiąga wartość ustaloną wynika z napięcia zasilania i rezystancji uzwojeń Napięcie zasilania musi więc być nominalnego aby nie przekroczyć prądu znamionowego [Microchip, DS01307] 55

56 Praca w pętli otwartej z przerywaniem napięcia Wielkością sterowaną jest napięcie Nie wymaga sprzężenia zwrotnego prosta realizacja Prąd zależy od rezystancji silnika i napięcia zasilania niska dokładność wartości i odwzorowania kształtu [Microchip, DS01307] 56
57 Proste sterowanie prądem Przy sterowaniu napięciem przy dużych prędkościach i T ω f krótszy impuls przy tym samym D Sterowanie prądem ze stałym (w ramach każdego kroku) odniesieniem mierzona jest wartość szczytowa prądu w ramach całego kroku jeżeli Ipk < Iref, to wypełnienie zostaje zwiększone i odwrotnie stałe napięcie odniesienia stały prąd odniesienia [Microchip, Stepper Motor Control with dspic DSCs] 57


 < UF [Microchip,")
58 Szybkie opadanie prądu Pomiar prądu na boczniku możliwy w każdej chwili Załączenie Q D mniejsze straty mocy, gdyż UDS(on) < UF [Microchip, DS01307] 58


59 Powolne opadanie prądu Lepsze załączenie dwóch tranzystorów dolnych dwa górne kondensatory booststap mogą się rozładować i załączenie górnych Q będzie niemożliwe Mniejsza u mniejszy hałas Napięcie na boczniku obecne tylko w czasie wysterowania [Microchip, DS01307] 59

60 Sterowanie z mieszanym opadaniem prądu Duże prędkości mogą wymagać opadania szybkiego Jedno z rozwiązań: powolne przy zwiększaniu, szybkie przy zmniejszaniu prądu odniesienia Przyspieszenie można też uzyskać stosując opadanie powolne, ale z przewodzeniem diodami nie tranzystorami większa R krótsza stała czasowa w obwodzie RL [Microchip, DS01307] 60


61 Pomiar prądu Rzeczywisty kształt prądu silnika musi być odtworzony na podstawie sygnału z bocznika wskutek przełączania tranzystorów, sygnał ten jest równy prądowi silnika tylko w pewnych przedziałach czasu Przy szybkim opadaniu konieczny pomiar wartości ujemnych W najprostszym przypadku używana jest wartość szczytowa modułu [Microchip, DS01307] 61
62 Sterowanie w pętli zamkniętej Wymaga regulatora PI Przekształcenie Tustina kompensacja bieguna silnika jeżeli parametry silnika są znane, to dobór parametrów jest prosty Przekształcenie Laplace a Transmitancja układu zamkniętego układ 1. rzędu: Czas narastania prądu: tr 3τ = 3R / (K V) K = 3R / (tr V) [Microchip, DS01307] 62
63 Działanie sterownika z cyfrowym sprzężeniem zwrotnym Osobny sterownik na każdą z faz Wymaga próbkowania prądu z wysoką częstotliwością prąd każdej z faz jest inny co najmniej 1-2 razy na okres PWM Długość (czas) kroku musi być większa od okresu PWM ograniczona prędkość przy dużej rozdzielczości (liczbie kroków na obrót) [Microchip, DS01307] 63

64 Implementacja cyfrowego sterownika PI Współczynnik wypełnienia zawartość akumulatora Ograniczenie wartości całki Zapobieganie nawijaniu dodatkowy człon proporcjonalny mała prędkość: małe Gw aby prąd dokładnie podążał za odniesieniem duża prędkość: duże Gw przyspiesza narastanie prądu duża prędkość małe Gw inaczej zanim wytworzy się pole magnetyczne, wirnik obróci się do dalszego położenia względem stojana hamowanie silnika duża prędkość duże Gw 64
65 Sterowanie położeniem Dla silników krokowych sprzężenie zwrotne nie jest niezbędne, ale: zwiększa dokładność i niezawodność umożliwia uzyskanie wyższych prędkości (nawet o rząd wielkości) konieczne stopniowe przyspieszanie i spowalnianie Przykładowe rozwiązanie: sterownik proporcjonalny (P) zmienne wzmocnienie zależy od bieżącej prędkości pozwala odpowiednio wcześnie rozpocząć spowalnianie, tak aby wał wyhamował dokładnie w chwili osiągnięcia zadanego położenia, bez oscylacji dodatkowo ograniczenie prędkości 65
Cel ćwiczenia. Przetwornik elektromagnetyczny. Silniki krokowe. Układ sterowania napędu mechatronicznego z silnikiem krokowym.
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
Silniki krokowe. 1. Podział siników krokowych w zależności od ich budowy.
 Silniki krokowe 1. Podział siników krokowych w zależności od ich budowy. 2. Rys.1. Podział silników krokowych. Ogólny podział silników krokowych dzieli je na wirujące i liniowe. Wśród bardziej rozpowszechnionych
Silniki krokowe 1. Podział siników krokowych w zależności od ich budowy. 2. Rys.1. Podział silników krokowych. Ogólny podział silników krokowych dzieli je na wirujące i liniowe. Wśród bardziej rozpowszechnionych
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
Kacper Kulczycki. Krótko o silnikach krokowych (cz. 2.)
") Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
Energoelektronika Cyfrowa
 Energoelektronika Cyfrowa dr inż. Maciej Piotrowicz Katedra Mikroelektroniki i Technik Informatycznych PŁ piotrowi@dmcs.p.lodz.pl http://fiona.dmcs.pl/~piotrowi -> Energoelektr... Energoelektronika Dziedzina
Energoelektronika Cyfrowa dr inż. Maciej Piotrowicz Katedra Mikroelektroniki i Technik Informatycznych PŁ piotrowi@dmcs.p.lodz.pl http://fiona.dmcs.pl/~piotrowi -> Energoelektr... Energoelektronika Dziedzina
Część 2. Sterowanie fazowe
 Część 2 Sterowanie fazowe Sterownik fazowy prądu przemiennego (AC phase controller) Prąd w obwodzie triak wyłączony: i = 0 triak załączony: i = ui / RL Zmiana kąta opóźnienia załączania θz powoduje zmianę
Część 2 Sterowanie fazowe Sterownik fazowy prądu przemiennego (AC phase controller) Prąd w obwodzie triak wyłączony: i = 0 triak załączony: i = ui / RL Zmiana kąta opóźnienia załączania θz powoduje zmianę
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Silniki prądu stałego
 Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Dobór współczynnika modulacji częstotliwości
 Dobór współczynnika modulacji częstotliwości Im większe mf, tym wyżej położone harmoniczne wyższe częstotliwości mniejsze elementy bierne filtru większy odstęp od f1 łatwiejsza realizacja filtru dp. o
Dobór współczynnika modulacji częstotliwości Im większe mf, tym wyżej położone harmoniczne wyższe częstotliwości mniejsze elementy bierne filtru większy odstęp od f1 łatwiejsza realizacja filtru dp. o
Silniki prądu stałego z komutacją bezstykową (elektroniczną)
") Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Przekształtniki impulsowe prądu stałego (dc/dc)
") Przekształtniki impulsowe prądu stałego (dc/dc) Wprowadzenie Sterowanie napięciem przez Modulację Szerokości Impulsów MSI (Pulse Width Modulation - PWM) Przekształtnik obniżający napięcie (buck converter)
Przekształtniki impulsowe prądu stałego (dc/dc) Wprowadzenie Sterowanie napięciem przez Modulację Szerokości Impulsów MSI (Pulse Width Modulation - PWM) Przekształtnik obniżający napięcie (buck converter)
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Ćwiczenie 1b. Silnik prądu stałego jako element wykonawczy Modelowanie i symulacja napędu CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH
 -CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
-CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
Maszyna indukcyjna jest prądnicą, jeżeli prędkość wirnika jest większa od prędkości synchronicznej, czyli n > n 1 (s < 0).
.") Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
Metoda zaburz-obserwuj oraz metoda wspinania
 Metoda zaburz-obserwuj oraz metoda wspinania Algorytm zaburz-obserwuj mierzy się moc (zwykle modułu) przed i po zmianie na tej podstawie podejmuje się decyzję o kierunku następnej zmiany Metoda wspinania
Metoda zaburz-obserwuj oraz metoda wspinania Algorytm zaburz-obserwuj mierzy się moc (zwykle modułu) przed i po zmianie na tej podstawie podejmuje się decyzję o kierunku następnej zmiany Metoda wspinania
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny.
 Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
IMPULSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM
 Instrukcja do ćwiczenia laboratoryjnego. IMPSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM Przekształtnik impulsowy z tranzystorem szeregowym słuŝy do przetwarzania energii prądu jednokierunkowego
Instrukcja do ćwiczenia laboratoryjnego. IMPSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM Przekształtnik impulsowy z tranzystorem szeregowym słuŝy do przetwarzania energii prądu jednokierunkowego
PL B1. POLITECHNIKA GDAŃSKA, Gdańsk, PL BUP 10/16. JAROSŁAW GUZIŃSKI, Gdańsk, PL PATRYK STRANKOWSKI, Kościerzyna, PL
 PL 226485 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226485 (13) B1 (21) Numer zgłoszenia: 409952 (51) Int.Cl. H02J 3/01 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 226485 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226485 (13) B1 (21) Numer zgłoszenia: 409952 (51) Int.Cl. H02J 3/01 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Wykaz symboli, oznaczeń i skrótów
 Wykaz symboli, oznaczeń i skrótów Symbole a a 1 operator obrotu podstawowej zmiennych stanu a 1 podstawowej uśrednionych zmiennych stanu b 1 podstawowej zmiennych stanu b 1 A A i A A i, j B B i cosφ 1
Wykaz symboli, oznaczeń i skrótów Symbole a a 1 operator obrotu podstawowej zmiennych stanu a 1 podstawowej uśrednionych zmiennych stanu b 1 podstawowej zmiennych stanu b 1 A A i A A i, j B B i cosφ 1
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca)
") Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
Część 6. Mieszane analogowo-cyfrowe układy sterowania. Łukasz Starzak, Sterowanie przekształtników elektronicznych, zima 2011/12
 Część 6 Mieszane analogowo-cyfrowe układy sterowania 1 Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu Sterowanie przekształtnikami o dowolnej topologii
Część 6 Mieszane analogowo-cyfrowe układy sterowania 1 Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu Sterowanie przekształtnikami o dowolnej topologii
11. Wzmacniacze mocy. Klasy pracy tranzystora we wzmacniaczach mocy. - kąt przepływu
 11. Wzmacniacze mocy 1 Wzmacniacze mocy są układami elektronicznymi, których zadaniem jest dostarczenie do obciążenia wymaganej (na ogół dużej) mocy wyjściowej przy możliwie dużej sprawności i małych zniekształceniach
11. Wzmacniacze mocy 1 Wzmacniacze mocy są układami elektronicznymi, których zadaniem jest dostarczenie do obciążenia wymaganej (na ogół dużej) mocy wyjściowej przy możliwie dużej sprawności i małych zniekształceniach
PL B1. AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE, Kraków, PL BUP 12/13
 PL 223804 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223804 (13) B1 (21) Numer zgłoszenia: 397275 (51) Int.Cl. H02P 25/08 (2006.01) H02P 6/18 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223804 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223804 (13) B1 (21) Numer zgłoszenia: 397275 (51) Int.Cl. H02P 25/08 (2006.01) H02P 6/18 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PRĄDNICE I SILNIKI. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI
 1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
Część 4. Zagadnienia szczególne. b. Sterowanie prądowe i tryb graniczny prądu dławika
 Część 4 Zagadnienia szczególne b. Sterowanie prądowe i tryb graniczny prądu dławika Idea sterowania prądowego sygnał sterujący pseudo-prądowy prąd tranzystora Pomiar prądu tranzystora Zegar Q1 załączony
Część 4 Zagadnienia szczególne b. Sterowanie prądowe i tryb graniczny prądu dławika Idea sterowania prądowego sygnał sterujący pseudo-prądowy prąd tranzystora Pomiar prądu tranzystora Zegar Q1 załączony
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Silnik indukcyjny - historia
 Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego
 Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
12. Zasilacze. standardy sieci niskiego napięcia tj. sieci dostarczającej energię do odbiorców indywidualnych
 . Zasilacze Wojciech Wawrzyński Wykład z przedmiotu Podstawy Elektroniki - wykład Zasilacz jest to urządzenie, którego zadaniem jest przekształcanie napięcia zmiennego na napięcie stałe o odpowiednich
. Zasilacze Wojciech Wawrzyński Wykład z przedmiotu Podstawy Elektroniki - wykład Zasilacz jest to urządzenie, którego zadaniem jest przekształcanie napięcia zmiennego na napięcie stałe o odpowiednich
Część 5. Mieszane analogowo-cyfrowe układy sterowania
 Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
Laboratorium Elektroniki w Budowie Maszyn
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Silnik prądu stałego. Sterowanie silnika prądu stałego
 Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Modulatory PWM CELE ĆWICZEŃ PODSTAWY TEORETYCZNE
 Modulatory PWM CELE ĆWICZEŃ Poznanie budowy modulatora szerokości impulsów z układem A741. Analiza charakterystyk i podstawowych obwodów z układem LM555. Poznanie budowy modulatora szerokości impulsów
Modulatory PWM CELE ĆWICZEŃ Poznanie budowy modulatora szerokości impulsów z układem A741. Analiza charakterystyk i podstawowych obwodów z układem LM555. Poznanie budowy modulatora szerokości impulsów
Spis treści 3. Spis treści
 Spis treści 3 Spis treści Przedmowa 11 1. Pomiary wielkości elektrycznych 13 1.1. Przyrządy pomiarowe 16 1.2. Woltomierze elektromagnetyczne 18 1.3. Amperomierze elektromagnetyczne 19 1.4. Watomierze prądu
Spis treści 3 Spis treści Przedmowa 11 1. Pomiary wielkości elektrycznych 13 1.1. Przyrządy pomiarowe 16 1.2. Woltomierze elektromagnetyczne 18 1.3. Amperomierze elektromagnetyczne 19 1.4. Watomierze prądu
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5
 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
Silniki indukcyjne. Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe.
 Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Bezpośrednie sterowanie momentem silnika indukcyjnego zasilanego z 3-poziomowego. przekształtnika MSI z kondensatorami o zmiennym potencjale
 Bezpośrednie sterowanie momentem silnika indukcyjnego zasilanego z 3-poziomowego przekształtnika MSI z kondensatorami o zmiennym potencjale przekształtnika MSI z kondensatorami o zmiennym potencjale 1
Bezpośrednie sterowanie momentem silnika indukcyjnego zasilanego z 3-poziomowego przekształtnika MSI z kondensatorami o zmiennym potencjale przekształtnika MSI z kondensatorami o zmiennym potencjale 1
Stabilizatory impulsowe
 POITECHNIKA BIAŁOSTOCKA Temat i plan wykładu WYDZIAŁ EEKTRYCZNY Jakub Dawidziuk Stabilizatory impulsowe 1. Wprowadzenie 2. Podstawowe parametry i układy pracy 3. Przekształtnik obniżający 4. Przekształtnik
POITECHNIKA BIAŁOSTOCKA Temat i plan wykładu WYDZIAŁ EEKTRYCZNY Jakub Dawidziuk Stabilizatory impulsowe 1. Wprowadzenie 2. Podstawowe parametry i układy pracy 3. Przekształtnik obniżający 4. Przekształtnik
Ćwiczenie 1. Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym.
 Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
Prostowniki. Prostownik jednopołówkowy
 Prostowniki Prostownik jednopołówkowy Prostownikiem jednopołówkowym nazywamy taki prostownik, w którym po procesie prostowania pozostają tylko te części przebiegu, które są jednego znaku a części przeciwnego
Prostowniki Prostownik jednopołówkowy Prostownikiem jednopołówkowym nazywamy taki prostownik, w którym po procesie prostowania pozostają tylko te części przebiegu, które są jednego znaku a części przeciwnego
Wprowadzenie do mechatroniki
 Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Człony wykonawcze Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Urządzenia nastawcze aktuatory elektro-mechaniczne Urządzenia nastawcze - wykorzystywane do wykonywania ruchów lub
Liniowe układy scalone w technice cyfrowej
 Liniowe układy scalone w technice cyfrowej Wykład 6 Zastosowania wzmacniaczy operacyjnych: konwertery prąd-napięcie i napięcie-prąd, źródła prądowe i napięciowe, przesuwnik fazowy Konwerter prąd-napięcie
Liniowe układy scalone w technice cyfrowej Wykład 6 Zastosowania wzmacniaczy operacyjnych: konwertery prąd-napięcie i napięcie-prąd, źródła prądowe i napięciowe, przesuwnik fazowy Konwerter prąd-napięcie
Scalony analogowy sterownik przekształtników impulsowych MCP1630
 Scalony analogowy sterownik przekształtników impulsowych MCP1630 DRV CFB VFB 1. Impuls zegara S=1 R=0 Q=0, DRV=0 (przez bramkę OR) 2. Koniec impulsu S=0 R=0 Q=Q 1=0 DRV=1 3. CFB > COMP = f(vfb VREF) S=0
Scalony analogowy sterownik przekształtników impulsowych MCP1630 DRV CFB VFB 1. Impuls zegara S=1 R=0 Q=0, DRV=0 (przez bramkę OR) 2. Koniec impulsu S=0 R=0 Q=Q 1=0 DRV=1 3. CFB > COMP = f(vfb VREF) S=0
2. Dane znamionowe badanego silnika.
 Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
Wydział: EAIiE kierunek: AiR, rok II Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Laboratorium z Elektrotechniki z Napędami Elektrycznymi Grupa laboratoryjna: A Czwartek 13:15 Paweł Górka
PL B1. Sposób sterowania przełączalnego silnika reluktancyjnego i układ do sterowania przełączalnego silnika reluktancyjnego
 PL 218265 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218265 (13) B1 (21) Numer zgłoszenia: 393329 (51) Int.Cl. H02P 6/18 (2006.01) H02P 25/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 218265 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218265 (13) B1 (21) Numer zgłoszenia: 393329 (51) Int.Cl. H02P 6/18 (2006.01) H02P 25/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
Metoda ułamka prądu zwarcia
 Metoda ułamka prądu zwarcia Zakłada się, że Imp / Isc = const (ki 0,78 0,92) Mierzony jest Isc, a prąd pracy modułu utrzymywany jest na wartości ki Isc Metody pomiaru zależność bliższa proporcjonalnej
Metoda ułamka prądu zwarcia Zakłada się, że Imp / Isc = const (ki 0,78 0,92) Mierzony jest Isc, a prąd pracy modułu utrzymywany jest na wartości ki Isc Metody pomiaru zależność bliższa proporcjonalnej
Charakterystyka rozruchowa silnika repulsyjnego
 Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy o wzmacniaczu mocy. Takim obciążeniem mogą być na przykład...
 Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy
Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Gdy wzmacniacz dostarcz do obciążenia znaczącą moc, mówimy
Oddziaływanie wirnika
 Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie. Gr. 2 Godzina: 15:30 Temat ćwiczenia: Hamowanie impulsowe silnika szeregowego
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Trakcja Elektryczna Wydział: EAIiIB Rok: 2014/2015 Gr. 2 Godzina: 15:30 Temat ćwiczenia: Hamowanie impulsowe silnika szeregowego Wykonał: Andrzej
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Trakcja Elektryczna Wydział: EAIiIB Rok: 2014/2015 Gr. 2 Godzina: 15:30 Temat ćwiczenia: Hamowanie impulsowe silnika szeregowego Wykonał: Andrzej
Sposób rozruchu i sterowania przełączalnego silnika reluktancyjnego i układ do rozruchu i sterowania przełączalnego silnika reluktancyjnego
 PL 218435 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218435 (13) B1 (21) Numer zgłoszenia: 392873 (51) Int.Cl. H02P 25/08 (2006.01) H02P 6/18 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 218435 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218435 (13) B1 (21) Numer zgłoszenia: 392873 (51) Int.Cl. H02P 25/08 (2006.01) H02P 6/18 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Podstawy fizyki sezon 2 7. Układy elektryczne RLC
 Podstawy fizyki sezon 2 7. Układy elektryczne RLC Agnieszka Obłąkowska-Mucha AGH, WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Układ RC
Podstawy fizyki sezon 2 7. Układy elektryczne RLC Agnieszka Obłąkowska-Mucha AGH, WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Układ RC
Konstrukcja mostka mocy typu "H" opartego o układ HIP4081A Robert Szlawski
 Na prawach rękopisu Raport 22/02/2008 Konstrukcja mostka mocy typu "H" opartego o układ HIP4081A Robert Szlawski Słowa kluczowe: napęd elektryczny, sterownik. Wrocław 2008, rev.a Spis treści 1 Wstęp 3
Na prawach rękopisu Raport 22/02/2008 Konstrukcja mostka mocy typu "H" opartego o układ HIP4081A Robert Szlawski Słowa kluczowe: napęd elektryczny, sterownik. Wrocław 2008, rev.a Spis treści 1 Wstęp 3
Przekształtniki napięcia stałego na stałe
 Przekształtniki napięcia stałego na stałe Buck converter S 1 łącznik w pełni sterowalny, przewodzi prąd ze źródła zasilania do odbiornika S 2 łącznik diodowy zwiera prąd odbiornika przy otwartym S 1 U
Przekształtniki napięcia stałego na stałe Buck converter S 1 łącznik w pełni sterowalny, przewodzi prąd ze źródła zasilania do odbiornika S 2 łącznik diodowy zwiera prąd odbiornika przy otwartym S 1 U
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej.
 Szkoły Policealnej Zawodowej.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Temat: Wzmacniacze operacyjne wprowadzenie
 Temat: Wzmacniacze operacyjne wprowadzenie.wzmacniacz operacyjny schemat. Charakterystyka wzmacniacza operacyjnego 3. Podstawowe właściwości wzmacniacza operacyjnego bardzo dużym wzmocnieniem napięciowym
Temat: Wzmacniacze operacyjne wprowadzenie.wzmacniacz operacyjny schemat. Charakterystyka wzmacniacza operacyjnego 3. Podstawowe właściwości wzmacniacza operacyjnego bardzo dużym wzmocnieniem napięciowym
Regulacja dwupołożeniowa (dwustawna)
") Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
ELEMENTY UKŁADÓW ENERGOELEKTRONICZNYCH
 Politechnika Warszawska Wydział Elektryczny ELEMENTY UKŁADÓW ENERGOELEKTRONICZNYCH Piotr Grzejszczak Mieczysław Nowak P W Instytut Sterowania i Elektroniki Przemysłowej 2015 Wiadomości ogólne Tranzystor
Politechnika Warszawska Wydział Elektryczny ELEMENTY UKŁADÓW ENERGOELEKTRONICZNYCH Piotr Grzejszczak Mieczysław Nowak P W Instytut Sterowania i Elektroniki Przemysłowej 2015 Wiadomości ogólne Tranzystor
Analiza ustalonego punktu pracy dla układu zamkniętego
 Analiza ustalonego punktu pracy dla układu zamkniętego W tym przypadku oznacza stałą odchyłkę od ustalonego punktu pracy element SUM element DIFF napięcie odniesienia V ref napięcie uchybu V e V ref HV
Analiza ustalonego punktu pracy dla układu zamkniętego W tym przypadku oznacza stałą odchyłkę od ustalonego punktu pracy element SUM element DIFF napięcie odniesienia V ref napięcie uchybu V e V ref HV
Analogowy sterownik silnika krokowego oparty na układzie avt 1314
 Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO
 Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
Tranzystorowe wzmacniacze OE OB OC. na tranzystorach bipolarnych
 Tranzystorowe wzmacniacze OE OB OC na tranzystorach bipolarnych Wzmacniacz jest to urządzenie elektroniczne, którego zadaniem jest : proporcjonalne zwiększenie amplitudy wszystkich składowych widma sygnału
Tranzystorowe wzmacniacze OE OB OC na tranzystorach bipolarnych Wzmacniacz jest to urządzenie elektroniczne, którego zadaniem jest : proporcjonalne zwiększenie amplitudy wszystkich składowych widma sygnału
Silniki prądu przemiennego
 Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
- kompensator synchroniczny, to właściwie silnik synchroniczny biegnący jałowo (rys.7.41) i odpowiednio wzbudzony;
 i odpowiednio wzbudzony;") Temat: Maszyny synchroniczne specjalne (kompensator synchroniczny, prądnica tachometryczna synchroniczna, silniki reluktancyjne, histerezowe, z magnesami trwałymi. 1. Kompensator synchroniczny. - kompensator
Temat: Maszyny synchroniczne specjalne (kompensator synchroniczny, prądnica tachometryczna synchroniczna, silniki reluktancyjne, histerezowe, z magnesami trwałymi. 1. Kompensator synchroniczny. - kompensator
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Część 2. Sterowanie fazowe
 Część 2 Sterowanie fazowe Sterownik fazowy prądu przemiennego (AC phase controller) Prąd w obwodzie triak wyłączony: i = 0 triak załączony: i = ui / RL Zmiana kąta opóźnienia załączania θz powoduje zmianę
Część 2 Sterowanie fazowe Sterownik fazowy prądu przemiennego (AC phase controller) Prąd w obwodzie triak wyłączony: i = 0 triak załączony: i = ui / RL Zmiana kąta opóźnienia załączania θz powoduje zmianę
Wzmacniacz jako generator. Warunki generacji
 Generatory napięcia sinusoidalnego Drgania sinusoidalne można uzyskać Poprzez utworzenie wzmacniacza, który dla jednej częstotliwości miałby wzmocnienie równe nieskończoności. Poprzez odtłumienie rzeczywistego
Generatory napięcia sinusoidalnego Drgania sinusoidalne można uzyskać Poprzez utworzenie wzmacniacza, który dla jednej częstotliwości miałby wzmocnienie równe nieskończoności. Poprzez odtłumienie rzeczywistego
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
II prawo Kirchhoffa Obwód RC Obwód RC Obwód RC
 II prawo Kirchhoffa algebraiczna suma zmian potencjału napotykanych przy pełnym obejściu dowolnego oczka jest równa zeru klucz zwarty w punkcie a - ładowanie kondensatora równanie ładowania Fizyka ogólna
II prawo Kirchhoffa algebraiczna suma zmian potencjału napotykanych przy pełnym obejściu dowolnego oczka jest równa zeru klucz zwarty w punkcie a - ładowanie kondensatora równanie ładowania Fizyka ogólna
PL B1. AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE, Kraków, PL BUP 11/13
 PL 223396 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223396 (13) B1 (21) Numer zgłoszenia: 396979 (51) Int.Cl. H02P 25/08 (2006.01) H02P 6/18 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223396 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223396 (13) B1 (21) Numer zgłoszenia: 396979 (51) Int.Cl. H02P 25/08 (2006.01) H02P 6/18 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego
 Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
DANE: wartość skuteczna międzyprzewodowego napięcia zasilającego E S = 230 V; rezystancja odbiornika R d = 2,7 Ω; indukcyjność odbiornika.
 Zadanie 4. Prostownik mostkowy 6-pulsowy z tyrystorami idealnymi o komutacji natychmiastowej zasilany z sieci 3 400 V, 50 Hz pracuje z kątem opóźnienia załączenia tyrystorów α = 60º. Obciążenie prostownika
Zadanie 4. Prostownik mostkowy 6-pulsowy z tyrystorami idealnymi o komutacji natychmiastowej zasilany z sieci 3 400 V, 50 Hz pracuje z kątem opóźnienia załączenia tyrystorów α = 60º. Obciążenie prostownika
Demonstracja: konwerter prąd napięcie
 Demonstracja: konwerter prąd napięcie i WE =i i WE i v = i WE R R=1 M Ω i WE = [V ] 10 6 [Ω] v + Zasilanie: +12, 12 V wy( ) 1) Oświetlanie o stałym natężeniu: =? (tryb DC) 2) Oświetlanie przez lampę wstrząsoodporną:
Demonstracja: konwerter prąd napięcie i WE =i i WE i v = i WE R R=1 M Ω i WE = [V ] 10 6 [Ω] v + Zasilanie: +12, 12 V wy( ) 1) Oświetlanie o stałym natężeniu: =? (tryb DC) 2) Oświetlanie przez lampę wstrząsoodporną:
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Pracownia Automatyki i Elektrotechniki Katedry Tworzyw Drzewnych Ćwiczenie 5. Analiza pracy oraz zasada działania silników asynchronicznych
 ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
7. Tyrystory. Tyrystor SCR (Silicon Controlled Rectifier)
") 7. Tyrystory 1 Tyrystory są półprzewodnikowymi przyrządami mocy pracującymi jako łączniki dwustanowe to znaczy posiadające stan włączenia (charakteryzujący się małą rezystancją) i stan wyłączenia (o dużej
7. Tyrystory 1 Tyrystory są półprzewodnikowymi przyrządami mocy pracującymi jako łączniki dwustanowe to znaczy posiadające stan włączenia (charakteryzujący się małą rezystancją) i stan wyłączenia (o dużej
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Sterownik nagrzewnic elektrycznych HE module
 Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
BADANIE SILNIKA RELUKTANCYJNEGO PRZEŁĄCZALNEGO (SRM) CZĘŚĆ 2 PRACA DYNAMICZNA SILNIKA
 CZĘŚĆ 2 PRACA DYNAMICZNA SILNIKA") Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Małej Mocy BADANIE SILNIKA RELUKTANCYJNEGO PRZEŁĄCZALNEGO (SRM) CZĘŚĆ 2 PRACA DYNAMICZNA SILNIKA Warszawa 2015 1.
Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Małej Mocy BADANIE SILNIKA RELUKTANCYJNEGO PRZEŁĄCZALNEGO (SRM) CZĘŚĆ 2 PRACA DYNAMICZNA SILNIKA Warszawa 2015 1.
Przetwornica mostkowa (full-bridge)
") Przetwornica mostkowa (full-bridge) Należy do grupy pochodnych od obniżającej identyczny (częściowo podwojony) podobwód wyjściowy Transformator można rozpatrywać jako 3-uzwojeniowy (1:n:n) oba uzwojenia
Przetwornica mostkowa (full-bridge) Należy do grupy pochodnych od obniżającej identyczny (częściowo podwojony) podobwód wyjściowy Transformator można rozpatrywać jako 3-uzwojeniowy (1:n:n) oba uzwojenia
SILNIKI PRĄDU STAŁEGO
 SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
Technologia Godna Zaufania
 SPRĘŻARKI ŚRUBOWE ZE ZMIENNĄ PRĘDKOŚCIĄ OBROTOWĄ IVR OD 7,5 DO 75kW Technologia Godna Zaufania IVR przyjazne dla środowiska Nasze rozległe doświadczenie w dziedzinie sprężonego powietrza nauczyło nas że
SPRĘŻARKI ŚRUBOWE ZE ZMIENNĄ PRĘDKOŚCIĄ OBROTOWĄ IVR OD 7,5 DO 75kW Technologia Godna Zaufania IVR przyjazne dla środowiska Nasze rozległe doświadczenie w dziedzinie sprężonego powietrza nauczyło nas że
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska Oprac. na podst. : Potocki L., Elektronika dla Wszystkich, 2002 Program wg: Simon Monk, https://learn.adafruit.com/downloads/pdf/adafruitarduino-lesson-16-stepper-motors.pdf
Instytut Informatyki Politechnika Poznańska Oprac. na podst. : Potocki L., Elektronika dla Wszystkich, 2002 Program wg: Simon Monk, https://learn.adafruit.com/downloads/pdf/adafruitarduino-lesson-16-stepper-motors.pdf