Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
|
|
|
- Wiktor Kubicki
- 7 lat temu
- Przeglądów:
Transkrypt


1 Instytut Informatyki Politechnika Poznańska

2 Zasilanie: 5V Pobór prądu: < 2mA Efektywny kąt: < 15º
3 Zasada pomiaru Odległość = (Szerokość impulsu Prędkość dźwięku) /
4 Zależność prędkości fali dźwiękowej (w m/s) od temperatury i wilgotności względnej powietrza C 20%RH 50%RH 80%RH 0 331,52 331,62 331, ,57 334,70 334, ,60 337,79 337, ,61 340,88 341, ,62 343,99 344, ,62 347,13 347, ,67 350,32 351,01 [ m/ s] 331 0,6 T[ C]
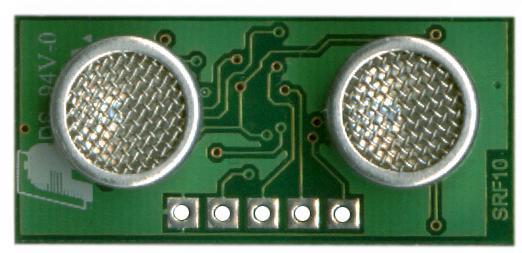
5 Charakterystyka sensora: D[cm] = T[µs] / 58 Producent podaje zakres: 2cm cm (3 cm 300 cm) Rozdzielczość: 0,3 cm Częstotliwość: 40 khz (fala 8 x 25 µs = 200 µs)
6 W temperaturze 21ºC prędkość dźwięku wynosi ok. 345m/s Oznacza to 0,0345 cm/µs Czyli przebycie odległości 1cm wymaga 28,9855 µs W zaokrągleniu przyjmujemy 29, a ponieważ dźwięk przebywa podwójną odległość i w związku z tym zmierzony czas odpowiedzi należy podzielić przez
7 Charakterystyka sensora D[cm] = T[µs] / 58 Producent podaje zakres 2cm cm
8 Charakterystyka sensora dookólna
9 Transmisja asynchroniczna Brak
10 Przykładowe biblioteki dla Arduino Example/
11 Przykładowe realizacja // Pomiar odległości w cm z czujnikiem HC-SR04 //Konfiguracja sprzętowa int trigpin = 9; int echopin = 10; int gndpin = 11; int vccpin = 8;
12 Przykładowe realizacja //Konfiguracja mikrokontrolera void setup() { Serial.begin(57600); pinmode(trigpin, OUTPUT); pinmode(echopin, INPUT); pinmode(gndpin, OUTPUT); digitalwrite(gndpin, LOW); pinmode(vccpin, OUTPUT); digitalwrite(vccpin, HIGH); // Zasilanie masa // Zasilanie +Vcc } Serial.println( Pomiar odleglosci (w cm) z HC-SR04 );
13 Przykładowe realizacja //Pętla główna void loop() { Serial.print(sonarPomiar_cm()); Serial.println( cm ); delay(1000); //Pomiar odległości w cm }
14 Przykładowe realizacja // Funkcja realizującą pomiar w cm int sonarpomiar_cm() { digitalwrite(trigpin, LOW); delaymicroseconds(5); digitalwrite(trigpin, HIGH); delaymicroseconds(12); // Impuls >10 µs digitalwrite(trigpin, LOW); int czas = pulsein(echopin, HIGH); int odleglosc = czas / 58; if ((odleglosc > 500) (odleglosc < 0)) return 999; else return odleglosc; // obliczanie odległości // przekroczony zakres pomiaru // poprawny pomiar w cm }

15

16
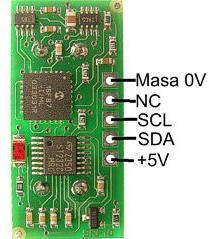
17 Sensor z magistralą I2C

18 Protokół I2C wzorowany na układach EEPROM serii 24xx Domyślny adres SFR10: 0xE0 Może być on zmieniony przez użytkownika na jeden z adresów: E0, E2, E4, E6, E8, EA, EC, EE, F0, F2, F4, F6, F8, FA, FC lub FE Rejestry SRF10 Zakres pomiaru określany jest w µs, tzn. wartość max równa (0xFFFF) odpowiada odległości 1129 cm lub 442 cale Rejestr #2 umożliwia zmianę wzmocnienia analogowego

19 Polecenia Polecenia #80 do #82 ustalają format wyniku Polecenia #160, #165, #170 przeznaczone są do zmiany adresu I2C

20 Wzmocnienie analogowe

21 Wzmocnienie analogowe

22 Zmiana adresów I2C
23 Czytnik zakresu SFR10 // I2C SRF10 or SRF08 Devantech Ultrasonic Ranger Finder // by Nicholas Zambetti < // and James Tichenor < // Demonstrates use of the Wire library reading data from the // Devantech Utrasonic Rangers SFR08 and SFR10 // Created 29 April 2006 // This example code is in the public domain. #include <Wire.h>
24 Czytnik zakresu SFR10 void setup() { Wire.begin(); Serial.begin(9600); } int reading = 0; // join i2c bus (address optional for master) // start serial communication at 9600bps void loop() { // step 1: instruct sensor to read echoes Wire.beginTransmission(112); // transmit to device #112 (0x70) // the address specified in the datasheet is 224 (0xE0) // but i2c adressing uses the high 7 bits so it's 112 Wire.write(byte(0x00)); // sets register pointer to the command register (0x00) Wire.write(byte(0x50)); // command sensor to measure in "inches" (0x50) // use 0x51 for centimeters // use 0x52 for ping microseconds Wire.endTransmission(); // stop transmitting
25 Czytnik zakresu SFR10 // step 2: wait for readings to happen delay(70); // datasheet suggests at least 65 milliseconds // step 3: instruct sensor to return a particular echo reading Wire.beginTransmission(112); // transmit to device #112 Wire.write(byte(0x02)); // sets register pointer to echo #1 register (0x02) Wire.endTransmission(); // stop transmitting // step 4: request reading from sensor Wire.requestFrom(112, 2); // request 2 bytes from slave device #
26 Czytnik zakresu SFR10 // step 5: receive reading from sensor if (2 <= Wire.available()) // if two bytes were received { reading = Wire.read(); // receive high byte (overwrites previous reading) reading = reading << 8; // shift high byte to be high 8 bits reading = Wire.read(); // receive low byte as lower 8 bits Serial.println(reading); // print the reading } } delay(250); the output :) // wait a bit since people have to read
27 /* Czytnik zakresu SFR10 Fragment zakomentowany // The following code changes the address of a Devantech Ultrasonic Range Finder (SRF10 or SRF08) // usage: changeaddress(0x70, 0xE6); void changeaddress(byte oldaddress, byte newaddress) { Wire.beginTransmission(oldAddress); Wire.write(byte(0x00)); Wire.write(byte(0xA0)); Wire.endTransmission();
28 Czytnik zakresu SFR10 Fragment zakomentowany Wire.beginTransmission(oldAddress); Wire.write(byte(0x00)); Wire.write(byte(0xAA)); Wire.endTransmission(); Wire.beginTransmission(oldAddress); Wire.write(byte(0x00)); Wire.write(byte(0xA5)); Wire.endTransmission(); Wire.beginTransmission(oldAddress); Wire.write(byte(0x00)); Wire.write(newAddress); Wire.endTransmission(); } */
29 Symulator czujnika SFR10 byte address = 112; // adres czujnika unsigned int manipvar = 0; // zmienna do zmiany danych byte bytessent = 2 ; // liczba bajtów do wysłania byte bytestosend[2] ; // przygotowanie danych do wysłania byte command = 0 ; // przechowywanie poleceń { void setup() TWAR = (address << 1) 0b ; // ustawienie adresu i ogólnej odpowiedzi na wywołania TWCR = 0b ; // ustawienie TWEA, TWEN i TWIE na 1 SREG = 0b ; // globalne włączenie przerwań pinmode(13, OUTPUT); } // koniec void setup()
30 Symulator czujnika SFR10 void loop() { if (command == 0x50) // włączenie diody dla polecenia 0x50 digitalwrite (13, HIGH); if (command == 0x02) // wyłączenie diody dla polecenia 0x02 digitalwrite (13, LOW); manipvar++; // główna zmienna do manipulowania dwoma bajtami wyjściowymi bytestosend [0] = manipvar; // przygotowanie starszego i młodszego bajtu zmiennej manipvar bytestosend [1] = manipvar >> 8 ; // starszy bajt manipvar delay (250); // coś innego do zrobienia podczas oczekiwania } // koniec void loop()
31 Symulator czujnika SFR10 ISR (TWI_vect) { // procedura obsługi przerwania przypisana do wektora if (TWCR & (1 << TWINT)) { // powtórne sprawdzenie, czy przerwanie jest właściwe if ((TWSR & 0b ) == 0x80) { // dane przychodzące } command = TWDR; // skopiowanie danych polecenia do wykorzystania później TWCR = 0b ; // reset oryginalnej konfiguracji
32 Symulator czujnika SFR10 if ((TWSR & 0b ) == 0xA8 ) // żądanie danych wychodzących { while (bytessent > 0 ) // wysłanie bajtów do mastera { bytessent--; TWDR = bytestosend [bytessent]; // wysłanie danych od najstarszego do najmłodszego bajta TWCR = 0b ; // reset po każdym wysłaniu delay (5); // chwilowa pauza po wysłaniu } if (bytessent == 0 ) // reset liczby bajtów i jeżeli bufor jest pusty bytessent = 2; } // koniec if ((TWSR & 0b ) == 0xA8 )
33 Symulator czujnika SFR10 TWCR = 0b ; // jeszcze jeden reset na wszelki wypadek SREG = 0b ; // włączenie z powrotem przerwań } // koniec if (TWCR & (1 << TWINT)) } // koniec ISR (TWI_vect)

34 Dziękuję
Pomiar odległości z Arduino czujniki, schematy, przykładowe kody
 Pomiar odległości z Arduino czujniki, schematy, przykładowe kody W robotyce, mechatronice czy modelarstwie do rozwiązania jest problem pomiaru odległości do czegoś, na przykład do ściany lub do kogoś idącego
Pomiar odległości z Arduino czujniki, schematy, przykładowe kody W robotyce, mechatronice czy modelarstwie do rozwiązania jest problem pomiaru odległości do czegoś, na przykład do ściany lub do kogoś idącego
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Systemy Wbudowane. Arduino C. Arduino C - stałe. Arduino C - Stałe. Arduino C - Stałe. Funkcje matematyczne. Arduino C - Stałe
 Arduino C - stałe Systemy Wbudowane Arduino C Wersja 2018 Unikać redefiniowania istniejących stałych. Stosowane dla polepszenia zrozumiałości kodu. Lepiej HIGH niż 0x01 Lepiej INPUT_PULLUP niż 0x2 Uwzględniają
Arduino C - stałe Systemy Wbudowane Arduino C Wersja 2018 Unikać redefiniowania istniejących stałych. Stosowane dla polepszenia zrozumiałości kodu. Lepiej HIGH niż 0x01 Lepiej INPUT_PULLUP niż 0x2 Uwzględniają
Przyrząd do grania bluesa Projekt zaliczeniowy z przedmiotu Programowanie Mikrokontrolerów
 Przyrząd do grania bluesa Projekt zaliczeniowy z przedmiotu Programowanie Mikrokontrolerów Artem Poliszczuk 1 Opis działania urządzenia W ramach projektu skonstruowano urządzenie pozwalające na granie
Przyrząd do grania bluesa Projekt zaliczeniowy z przedmiotu Programowanie Mikrokontrolerów Artem Poliszczuk 1 Opis działania urządzenia W ramach projektu skonstruowano urządzenie pozwalające na granie
Pilot RF 4-kanałowy + odbiornik XY-DJM-5V umożliwia zdalne sterowanie do czterech urządzeń. Nadajnik pilot MX804. Odbiornik XY-DJM.
 Pilot RF 4-kanałowy + odbiornik XY-DJM-5V umożliwia zdalne sterowanie do czterech urządzeń. Właściwości: Nadajnik pilot MX804 zasilanie pilota bateria L1028 23A 12V Napięcie zasilające 3V do 12 V Pobierany
Pilot RF 4-kanałowy + odbiornik XY-DJM-5V umożliwia zdalne sterowanie do czterech urządzeń. Właściwości: Nadajnik pilot MX804 zasilanie pilota bateria L1028 23A 12V Napięcie zasilające 3V do 12 V Pobierany
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
SCL > Pin 21 SDA > Pin 20 VCC > 5V GND > GND
 Nazwa implementacji: Budowa RTC w oparciu o DS1307 Autor: Krzysztof Bytow Opis implementacji: Układ DS1307 jest to zegar czasu rzeczywistego (Real Time Clock) służy do odliczania czasu niezależnie od stanu
Nazwa implementacji: Budowa RTC w oparciu o DS1307 Autor: Krzysztof Bytow Opis implementacji: Układ DS1307 jest to zegar czasu rzeczywistego (Real Time Clock) służy do odliczania czasu niezależnie od stanu
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
ĆWICZENIE 5. TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM
 ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
Expandery wejść MCP23S17 oraz MCP23017
 Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
LABORATORIUM - ELEKTRONIKI Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKI Układy mikroprocesorowe cz.2 PRZEBIEG ĆWICZENIA 1. Wybrać z dostarczonych przez prowadzącego następujące elementy Układ Arduino Mega Płytka prototypowa Wyświetlacz 2X16 Potencjometr
LABORATORIUM - ELEKTRONIKI Układy mikroprocesorowe cz.2 PRZEBIEG ĆWICZENIA 1. Wybrać z dostarczonych przez prowadzącego następujące elementy Układ Arduino Mega Płytka prototypowa Wyświetlacz 2X16 Potencjometr
Silnik prądu stałego. Sterowanie silnika prądu stałego
 Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Komunikacja z czujnikiem
 THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
Uwaga: dioda na wyjściu 13 świeci gdy na wyjście podamy 0.
 Podstawowe funkcje sterowania pinami cyfrowymi pinmode(8, OUTPUT); //ustawienie końcówki jako wyjście pinmode(8, INPUT); // ustawienie końcówki jako wejście pinmode(8, INPUT_PULLUP); // ustawienie końcówki
Podstawowe funkcje sterowania pinami cyfrowymi pinmode(8, OUTPUT); //ustawienie końcówki jako wyjście pinmode(8, INPUT); // ustawienie końcówki jako wejście pinmode(8, INPUT_PULLUP); // ustawienie końcówki
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
UW-DAL-MAN v2 Dotyczy urządzeń z wersją firmware UW-DAL v5 lub nowszą.
 Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska Oprac. na podst. : Potocki L., Elektronika dla Wszystkich, 2002 Program wg: Simon Monk, https://learn.adafruit.com/downloads/pdf/adafruitarduino-lesson-16-stepper-motors.pdf
Instytut Informatyki Politechnika Poznańska Oprac. na podst. : Potocki L., Elektronika dla Wszystkich, 2002 Program wg: Simon Monk, https://learn.adafruit.com/downloads/pdf/adafruitarduino-lesson-16-stepper-motors.pdf
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska Podstawy Porównanie silników prądu stałego komutatorowego i bezszczotkowego + U - W V Silnik prądu stałego z komutatorem 3-częściowym (3-biegunowy wirnik i 2-biegunowy
Instytut Informatyki Politechnika Poznańska Podstawy Porównanie silników prądu stałego komutatorowego i bezszczotkowego + U - W V Silnik prądu stałego z komutatorem 3-częściowym (3-biegunowy wirnik i 2-biegunowy
Systemy Wbudowane. Arduino C. Arduino C - stałe. Arduino C - Stałe. Arduino C - Stałe. Funkcje matematyczne. Arduino C - Stałe
 Arduino C - stałe Systemy Wbudowane Arduino C Wersja 2019 Unikać redefiniowania istniejących stałych. Stosowane dla polepszenia zrozumiałości kodu. Lepiej HIGH niż 0x01 Lepiej INPUT_PULLUP niż 0x2 Uwzględniają
Arduino C - stałe Systemy Wbudowane Arduino C Wersja 2019 Unikać redefiniowania istniejących stałych. Stosowane dla polepszenia zrozumiałości kodu. Lepiej HIGH niż 0x01 Lepiej INPUT_PULLUP niż 0x2 Uwzględniają
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska nrf24l01 transmisja w trybie Shockburst W tym trybie ramka ma prostą strukturę: Zakończona jest opcjonalnym polem kontrolnym, które obsługiwane
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska nrf24l01 transmisja w trybie Shockburst W tym trybie ramka ma prostą strukturę: Zakończona jest opcjonalnym polem kontrolnym, które obsługiwane
THP-100-x parametry. Pobór prądu (przy zasilaniu 12V) Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia
 Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia") THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
Programowanie mikrokontrolerów
 Programowanie mikrokontrolerów Magistrala I 2 C Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 6 stycznia 2012 Magistrala I 2 C Jest akronimem Inter-Intergrated Circuit.
Programowanie mikrokontrolerów Magistrala I 2 C Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 6 stycznia 2012 Magistrala I 2 C Jest akronimem Inter-Intergrated Circuit.
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
HP-1 parametry. Pobór prądu (przy zasilaniu 12V) Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia
 Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia") HP-1 HP-1 parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia Pomiar
HP-1 HP-1 parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia Pomiar
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Uczeń/Uczennica po zestawieniu połączeń zgłasza nauczycielowi gotowość do sprawdzenia układu i wszystkich połączeń.
 Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
Opis czytnika TRD-FLAT CLASSIC ver. 1.1. Naścienny czytnik transponderów UNIQUE w płaskiej obudowie
 TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
TRD-MINI COMBO. Uniwersalny moduł czytnika transponderów UNIQUE - wersja OEM. Podstawowe cechy :
 TRD-MINI COMBO Uniwersalny moduł czytnika transponderów UNIQUE - wersja OEM Podstawowe cechy : niewielkie rozmiary - 19 x 26 x 12 mm zasilanie od 3V do 6V 12 formatów danych wyjściowych tryb IDLE wyjście
TRD-MINI COMBO Uniwersalny moduł czytnika transponderów UNIQUE - wersja OEM Podstawowe cechy : niewielkie rozmiary - 19 x 26 x 12 mm zasilanie od 3V do 6V 12 formatów danych wyjściowych tryb IDLE wyjście
m e d i a s e r v i c e Moduł kamery JPEG z komunikacją szeregową CJ0706A
 1. Opis ogólny: /XXX/YYY (XXX przyjmować może wartości 232, 485 lub TTL, zaś YYY, to 090 lub 120) jest wysokozintegrowaną płytką, stanowiącą bazę do budowy systemów współpracujących z urządzeniami PDA,
1. Opis ogólny: /XXX/YYY (XXX przyjmować może wartości 232, 485 lub TTL, zaś YYY, to 090 lub 120) jest wysokozintegrowaną płytką, stanowiącą bazę do budowy systemów współpracujących z urządzeniami PDA,
Opis czytnika TRD-80 CLASSIC ver Moduł czytnika transponderów UNIQUE z wbudowaną anteną
 TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
DIGA Object Dictionary opis
 MANUAL DIGA Object Dictionary opis UWAGA! Dokument: DIGA_Object_Dictionery_Manual_v1_01.odt Publikowany jako: DIGA_Object_Dictionery_Manual_v1_01.pdf Data utworzenia: 27/09/2013 Napisany prze: Jacek Barcik
MANUAL DIGA Object Dictionary opis UWAGA! Dokument: DIGA_Object_Dictionery_Manual_v1_01.odt Publikowany jako: DIGA_Object_Dictionery_Manual_v1_01.pdf Data utworzenia: 27/09/2013 Napisany prze: Jacek Barcik
Arduino Power Shield. Moduł Arduino do sterowania silnikami dużej mocy i pomiaru prądu
 Arduino Power Shield Moduł Arduino do sterowania silnikami dużej mocy i pomiaru prądu 1 S t r o n a 1. Opis ogólny W odpowiedzi na potrzeby szybko rozwijającego się rynku prototypowania z użyciem platformy
Arduino Power Shield Moduł Arduino do sterowania silnikami dużej mocy i pomiaru prądu 1 S t r o n a 1. Opis ogólny W odpowiedzi na potrzeby szybko rozwijającego się rynku prototypowania z użyciem platformy
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Zmierzyć się z żywiołami, czyli jak zbudować własną stację badawczą! Zaczynamy! Pole komunikatów programu. Nawigacja w programie Arduino
 Zaczynamy! Lista zadań Menu programu sprawdzanie kodu Skróty wybranych poleceń wgrywanie kodu nowy program otwieranie zapisanych prog. Pole do wprowadzania kodu zapisywanie zmian wywołanie podglądu portu
Zaczynamy! Lista zadań Menu programu sprawdzanie kodu Skróty wybranych poleceń wgrywanie kodu nowy program otwieranie zapisanych prog. Pole do wprowadzania kodu zapisywanie zmian wywołanie podglądu portu
SPECYFIKACJA Przetwornik wilgotności HCRH-Modbus
 SPECYFIKACJA Przetwornik wilgotności HCRH-Modbus 1. Wprowadzenie...3 1.1. Funkcje urządzenia 3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4 2.1. Parametry przetwornika...4 2.2. Parametry
SPECYFIKACJA Przetwornik wilgotności HCRH-Modbus 1. Wprowadzenie...3 1.1. Funkcje urządzenia 3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4 2.1. Parametry przetwornika...4 2.2. Parametry
Przetwornik analogowo-cyfrowy
 Przetwornik analogowo-cyfrowy Przetwornik analogowo-cyfrowy A/C (ang. A/D analog to digital; lub angielski akronim ADC - od słów: Analog to Digital Converter), to układ służący do zamiany sygnału analogowego
Przetwornik analogowo-cyfrowy Przetwornik analogowo-cyfrowy A/C (ang. A/D analog to digital; lub angielski akronim ADC - od słów: Analog to Digital Converter), to układ służący do zamiany sygnału analogowego
Schemat blokowy architektury AVR
 Schemat blokowy architektury AVR Rejestry procesora AVR dostępne programowo Rejestry procesora AVR związane z pobraniem i wykonaniem rozkazu Schemat blokowy procesora ATMega 2560 ATMEL ATMEGA328P MEMORY
Schemat blokowy architektury AVR Rejestry procesora AVR dostępne programowo Rejestry procesora AVR związane z pobraniem i wykonaniem rozkazu Schemat blokowy procesora ATMega 2560 ATMEL ATMEGA328P MEMORY
SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1)
 Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1)") 20170513-1300 SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1) Skrócona instrukcja obsługi Od wersji oprogramowania 0.56 www.apautomatyka.pl
20170513-1300 SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1) Skrócona instrukcja obsługi Od wersji oprogramowania 0.56 www.apautomatyka.pl
Moduł komunikacyjny Modbus RTU do ciepłomierza SonoMeter 30
 Moduł komunikacyjny Modbus RTU do ciepłomierza SonoMeter 30 Zastosowanie służy do podłączania ciepłomierzy do sieci Modbus RTU przy użyciu interfejsu EIA- 485 Właściwości Galwanicznie izolowany interfejs
Moduł komunikacyjny Modbus RTU do ciepłomierza SonoMeter 30 Zastosowanie służy do podłączania ciepłomierzy do sieci Modbus RTU przy użyciu interfejsu EIA- 485 Właściwości Galwanicznie izolowany interfejs
SPECYFIKACJA Przetwornik wilgotności HCRH-MODBUS-Kb
 SPECYFIKACJA Przetwornik wilgotności HCRH-MODBUS-Kb 1. Wprowadzenie...3 1.1. Funkcje urządzenia 3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4 2.1. Parametry przetwornika 4 2.2. Parametry
SPECYFIKACJA Przetwornik wilgotności HCRH-MODBUS-Kb 1. Wprowadzenie...3 1.1. Funkcje urządzenia 3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4 2.1. Parametry przetwornika 4 2.2. Parametry
Wszystkie znaki występujące w tekście są zastrzeżonymi znakami firmowymi bądź towarowymi ich właścicieli.
 Tytuł oryginału: Pro Arduino ISBN: 978-83-246-8222-5 Original edition copyright 2013 by Rick Anderson and Dan Cervo. All rights reserved. Polish edition copyright 2014 by HELION SA. All rights reserved.
Tytuł oryginału: Pro Arduino ISBN: 978-83-246-8222-5 Original edition copyright 2013 by Rick Anderson and Dan Cervo. All rights reserved. Polish edition copyright 2014 by HELION SA. All rights reserved.
PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO
 PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO LABORATORIUM Temat: QNX Neutrino Interrupts Mariusz Rudnicki 2016 Wstęp W QNX Neutrino wszystkie przerwania sprzętowe przechwytywane są przez jądro systemu. Obsługę
PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO LABORATORIUM Temat: QNX Neutrino Interrupts Mariusz Rudnicki 2016 Wstęp W QNX Neutrino wszystkie przerwania sprzętowe przechwytywane są przez jądro systemu. Obsługę
SPECYFIKACJA. Przetwornik wilgotności i temperatury RH&T MODBUS RTU. HCRH-Ka-Modbus. Opracował: HOTCOLD s.c
 SPECYFIKACJA HCRH-Ka-Modbus Przetwornik wilgotności i temperatury RH&T MODBUS RTU Opracował: HOTCOLD s.c. 2017-11-29 1. Wprowadzenie... 3 1.1. Funkcje urządzenia... 3 1.2. Charakterystyka urządzenia...
SPECYFIKACJA HCRH-Ka-Modbus Przetwornik wilgotności i temperatury RH&T MODBUS RTU Opracował: HOTCOLD s.c. 2017-11-29 1. Wprowadzenie... 3 1.1. Funkcje urządzenia... 3 1.2. Charakterystyka urządzenia...
Język C. Wykład 9: Mikrokontrolery cz.2. Łukasz Gaweł Chemia C pokój 307
 Język C Wykład 9: Mikrokontrolery cz.2 Łukasz Gaweł Chemia C pokój 307 lukasz.gawel@pg.edu.pl Pierwszy program- powtórka Częstotliwość zegara procesora μc (należy sprawdzić z kartą techniczną μc) Dodaje
Język C Wykład 9: Mikrokontrolery cz.2 Łukasz Gaweł Chemia C pokój 307 lukasz.gawel@pg.edu.pl Pierwszy program- powtórka Częstotliwość zegara procesora μc (należy sprawdzić z kartą techniczną μc) Dodaje
RFID. Czytniki RFID. Instrukcja rev. 1.01
 RFID Czytniki RFID Instrukcja rev. 1.01 RFID Copyright 2015 by MicroMade All rights reserved Wszelkie prawa zastrzeżone Uwaga! Wszystkie dane 2 i 4 bajtowe są traktowane jako liczby i podawane są w kolejności
RFID Czytniki RFID Instrukcja rev. 1.01 RFID Copyright 2015 by MicroMade All rights reserved Wszelkie prawa zastrzeżone Uwaga! Wszystkie dane 2 i 4 bajtowe są traktowane jako liczby i podawane są w kolejności
start Program mikroprocesorowego miernika mocy generowanej $crystal = deklaracja
 ----------------------------start---------------------------- Program mikroprocesorowego miernika mocy generowanej $crystal = 8000000 deklaracja częstotliwości kwarcu taktującego uc $regfile "m8def.dat"
----------------------------start---------------------------- Program mikroprocesorowego miernika mocy generowanej $crystal = 8000000 deklaracja częstotliwości kwarcu taktującego uc $regfile "m8def.dat"
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
SPECYFIKACJA. Przetwornik temperatury PT100 MODBUS RTU. Opracował: HCC-03-Modbus. HOTCOLD s.c
 SPECYFIKACJA HCC-03-Modbus Przetwornik temperatury PT100 MODBUS RTU Opracował: HOTCOLD s.c. 2017-03-14 1. Wprowadzenie...3 1.1. Funkcje urządzenia...3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4
SPECYFIKACJA HCC-03-Modbus Przetwornik temperatury PT100 MODBUS RTU Opracował: HOTCOLD s.c. 2017-03-14 1. Wprowadzenie...3 1.1. Funkcje urządzenia...3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4
Opis czytnika TRD-55 CLASSIC ver Moduł czytnika transponderów UNIQUE z zewnętrzną anteną
 TRD-55 CLASSIC Moduł czytnika transponderów UNIQUE z zewnętrzną anteną Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT możliwość dołączenia różnych anten
TRD-55 CLASSIC Moduł czytnika transponderów UNIQUE z zewnętrzną anteną Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT możliwość dołączenia różnych anten
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
Rozdział 2. Programowanie Arduino i kodowanie społecznościowe (29)
") O autorach (11) O korektorze merytorycznym (12) Wprowadzenie (13) Podziękowania (14) Rozdział 1. Zmiany w rdzeniu Arduino 1.0.4 (15) Zmiany w środowisku programistycznym Arduino (15) Zmiany w szkicowniku
O autorach (11) O korektorze merytorycznym (12) Wprowadzenie (13) Podziękowania (14) Rozdział 1. Zmiany w rdzeniu Arduino 1.0.4 (15) Zmiany w środowisku programistycznym Arduino (15) Zmiany w szkicowniku
RS868v3 module configuration
 RS868v3 module configuration Configuration procedure To enter the configuration mode insert a jumper onto the pins marked CONFIG (see: Pinout). After every issued command (besides device reset) the device
RS868v3 module configuration Configuration procedure To enter the configuration mode insert a jumper onto the pins marked CONFIG (see: Pinout). After every issued command (besides device reset) the device
Aby w pełni przetestować układ o trzech wejściach IN_0, IN_1 i IN_2 chcemy wygenerować wszystkie możliwe kombinacje sygnałów wejściowych.
 Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Arduino dla początkujących. Kolejny krok Autor: Simon Monk. Spis treści
 Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
RS485 MODBUS Module 8I8O
 Wersja 2.2 12.01.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 2.2 12.01.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
SPECYFIKACJA. Przetwornik temperatury PT100 MODBUS RTU. Opracował: HCC-05c-Modbus. HOTCOLD s.c
 SPECYFIKACJA HCC-05c-Modbus Przetwornik temperatury PT100 MODBUS RTU Opracował: HOTCOLD s.c. 2017-05-22 1. Wprowadzenie...3 1.1. Funkcje urządzenia...3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4
SPECYFIKACJA HCC-05c-Modbus Przetwornik temperatury PT100 MODBUS RTU Opracował: HOTCOLD s.c. 2017-05-22 1. Wprowadzenie...3 1.1. Funkcje urządzenia...3 1.2. Charakterystyka urządzenia...3 2. Dane techniczne...4
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska Proces transmisji może w prowadzać błędy do przesyłanych wiadomości błędy pojedyncze lub grupowe Detekcja: Wymaga uznania, że niektóre wiadomości są nieważne
Instytut Informatyki Politechnika Poznańska Proces transmisji może w prowadzać błędy do przesyłanych wiadomości błędy pojedyncze lub grupowe Detekcja: Wymaga uznania, że niektóre wiadomości są nieważne
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Bootloader programming
 Arduino Esplora ATMega32u4 ISP programming Bootloader programming The bootloader is basically a.hex file that runs when you turn on the board. It is very similar to the BIOS that runs on your PC. It does
Arduino Esplora ATMega32u4 ISP programming Bootloader programming The bootloader is basically a.hex file that runs when you turn on the board. It is very similar to the BIOS that runs on your PC. It does
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
SUMA KONTROLNA (icmp_cksum) NUMER KOLEJNY (icmp_seq)
 NUMER KOLEJNY (icmp_seq)") Program my_ping: wysłanie komunikatu ICMP z żądaniem echa Struktura icmp (plik netinet/ip_icmp.h) 0 7 8 15 16 31 TYP (icmp_type) KOD (icmp_code) IDENTYFIKATOR (icmp_id) SUMA KONTROLNA (icmp_cksum) NUMER
Program my_ping: wysłanie komunikatu ICMP z żądaniem echa Struktura icmp (plik netinet/ip_icmp.h) 0 7 8 15 16 31 TYP (icmp_type) KOD (icmp_code) IDENTYFIKATOR (icmp_id) SUMA KONTROLNA (icmp_cksum) NUMER
Komputery klasy PC. Dariusz Chaberski
 Komputery klasy PC Dariusz Chaberski Start systemu adres 0xFFFF:0x0000 POST (ang. Power On Self Test) sprawdzenie zmiennej BIOSu 0x0040:0x0072-0x1234 - zimny start (RESET, włączenie zasilania), gorący
Komputery klasy PC Dariusz Chaberski Start systemu adres 0xFFFF:0x0000 POST (ang. Power On Self Test) sprawdzenie zmiennej BIOSu 0x0040:0x0072-0x1234 - zimny start (RESET, włączenie zasilania), gorący
DZT Licznik energii elektrycznej Sieć trójfazowa 4-przewodowa Połączenie bezpośrednie 100A Wyjście impulsowe oraz RS485/Modbus.
 DZT 6037 Licznik energii elektrycznej Sieć trójfazowa 4-przewodowa Połączenie bezpośrednie 100A Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V AC Napięciowy zakres
DZT 6037 Licznik energii elektrycznej Sieć trójfazowa 4-przewodowa Połączenie bezpośrednie 100A Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V AC Napięciowy zakres
SPECYFIKACJA. Przetwornik różnicy ciśnień DPC250-M, DPC2500-M, DPC4000-M, DPC7000-M (MODBUS RTU)
") SPECYFIKACJA Przetwornik różnicy ciśnień DPC250-M, DPC2500-M, DPC4000-M, DPC7000-M (MODBUS RTU) 2014-05-20 1. Wprowadzenie...3 1.1. Funkcje urządzenia... 3 1.2. Charakterystyka urządzenia... 3 1.3. Warto
SPECYFIKACJA Przetwornik różnicy ciśnień DPC250-M, DPC2500-M, DPC4000-M, DPC7000-M (MODBUS RTU) 2014-05-20 1. Wprowadzenie...3 1.1. Funkcje urządzenia... 3 1.2. Charakterystyka urządzenia... 3 1.3. Warto
MS360-LPM. wersja 1.09 (wersja robocza) Dokumentacja użytkownika
 Dokumentacja użytkownika") MS360-LPM wersja 1.09 (wersja robocza) Dokumentacja użytkownika Białystok 2011 Podstawy Komunikacja z multiczujnikiem MS360-LPM dostępna jest za pomocą transmisji szeregowej EIA-485 (wcześniej RS-485)
MS360-LPM wersja 1.09 (wersja robocza) Dokumentacja użytkownika Białystok 2011 Podstawy Komunikacja z multiczujnikiem MS360-LPM dostępna jest za pomocą transmisji szeregowej EIA-485 (wcześniej RS-485)
Akademia Górniczo- Hutmicza w Krakowie Katedra Elektroniki WIET
 Akademia Górniczo- Hutmicza w Krakowie Katedra Elektroniki WIET Technika mikroprocesorowa Instrukcja 3 Stos i podprogramy Autor: Paweł Russek Tłumaczenie: Marcin Pietroń http://www.fpga.agh.edu.pl/tm ver.
Akademia Górniczo- Hutmicza w Krakowie Katedra Elektroniki WIET Technika mikroprocesorowa Instrukcja 3 Stos i podprogramy Autor: Paweł Russek Tłumaczenie: Marcin Pietroń http://www.fpga.agh.edu.pl/tm ver.
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
DZT Licznik energii elektrycznej Sieć trójfazowa 4-przewodowa Połączenie bezpośrednie 100A Wyjście impulsowe oraz RS485/Modbus.
 DZT 6037 Licznik energii elektrycznej Sieć trójfazowa 4-przewodowa Połączenie bezpośrednie 100A Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V AC Napięciowy zakres
DZT 6037 Licznik energii elektrycznej Sieć trójfazowa 4-przewodowa Połączenie bezpośrednie 100A Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V AC Napięciowy zakres
UNIPROD 44-100 GLIWICE ul. Sowińskiego 3 tel: +48 32 238 77 31, fax +48 32 238 77 32 e-mail: kontakt@uniprod.pl 12.11.2011.1.
 UNIPROD 44-100 GLIWICE ul. Sowińskiego 3 tel: +48 32 238 77 31, fax +48 32 238 77 32 e-mail: kontakt@uniprod.pl 12.11.2011.1 UniSonic_HL INSTRUKCJA OBSŁUGI INTERFEJS SIECIOWY RS-485 MODBUS Spis treści.
UNIPROD 44-100 GLIWICE ul. Sowińskiego 3 tel: +48 32 238 77 31, fax +48 32 238 77 32 e-mail: kontakt@uniprod.pl 12.11.2011.1 UniSonic_HL INSTRUKCJA OBSŁUGI INTERFEJS SIECIOWY RS-485 MODBUS Spis treści.
IEEE 1284 - Centronics
 IEEE 1284 - Centronics Interfejs Centronics w wersji oryginalnej - łącze jednokierunkowe przesyłające informacje od komputera do drukarki przeznaczony jedynie do tego zadania, co wynikało z braku potrzeby
IEEE 1284 - Centronics Interfejs Centronics w wersji oryginalnej - łącze jednokierunkowe przesyłające informacje od komputera do drukarki przeznaczony jedynie do tego zadania, co wynikało z braku potrzeby
200M-ADAM.E. Systemy przesyłu sygnału audio. LAN-RING 200Mbps BOX + DIN35-LOCK* 1/6
 Systemy przesyłu sygnału audio BOX* Topologia LAN-RING 2x porty optyczne uniwersalne MM/SM z WDM 2x symetryczne audio w jakości MP3 2/8x IN, 2/8x OUT 1x LOCK przekaźnik 1x Ochrona przeciwprzepięciowa Temperatura
Systemy przesyłu sygnału audio BOX* Topologia LAN-RING 2x porty optyczne uniwersalne MM/SM z WDM 2x symetryczne audio w jakości MP3 2/8x IN, 2/8x OUT 1x LOCK przekaźnik 1x Ochrona przeciwprzepięciowa Temperatura
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Nazwa implementacji: Pamięć i zręczność - zapamiętaj kolejność. Autor: Krzysztof Bytow
 Nazwa implementacji: Pamięć i zręczność - zapamiętaj kolejność Autor: Krzysztof Bytow Opis implementacji: Budowa układu i programu do symulacji losowania jednej z sześciu liczb, jak w kostce do gry. Prezentacja
Nazwa implementacji: Pamięć i zręczność - zapamiętaj kolejność Autor: Krzysztof Bytow Opis implementacji: Budowa układu i programu do symulacji losowania jednej z sześciu liczb, jak w kostce do gry. Prezentacja
Opis czytnika TRD-HOT COMBO ver Naścienny czytnik transponderów UNIQUE w podświetlanej obudowie
 TRD-HOT COMBO Naścienny czytnik transponderów UNIQUE w podświetlanej obudowie Podstawowe cechy : zasilanie od 7V do 15V dwanaście formatów danych wyjściowych wodoszczelna obudowa wypełniona żywicami syntetycznymi
TRD-HOT COMBO Naścienny czytnik transponderów UNIQUE w podświetlanej obudowie Podstawowe cechy : zasilanie od 7V do 15V dwanaście formatów danych wyjściowych wodoszczelna obudowa wypełniona żywicami syntetycznymi
Problematyka sieci miejscowej LIN
 Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Pomiar natężenia światła (005; 15.07.2009; arduino, processing)
") Pomiar natężenia światła (005; 15.07.2009; arduino, processing) Artykuł ten będzie praktycznym wykorzystaniem opisu pomiaru napięcia przy użyciu Arduino. Fotorezystor z dzielnikiem napięcia będzie czujnikiem
Pomiar natężenia światła (005; 15.07.2009; arduino, processing) Artykuł ten będzie praktycznym wykorzystaniem opisu pomiaru napięcia przy użyciu Arduino. Fotorezystor z dzielnikiem napięcia będzie czujnikiem
Termometr cyfrowy DS18B20 obudowy i wyprowadzenia
 Magistrala 1-wire Magistrala 1-wire składa się z pojedynczej linii. Na magistrali 1-wire jedno urządzenie MASTER nadzoruje pracę jednego lub wielu urządzeń SLAVE. Urządzenie MASTER oraz wszystkie SLAVE
Magistrala 1-wire Magistrala 1-wire składa się z pojedynczej linii. Na magistrali 1-wire jedno urządzenie MASTER nadzoruje pracę jednego lub wielu urządzeń SLAVE. Urządzenie MASTER oraz wszystkie SLAVE
Oscyloskop (007; ; arduino; processing)
") Oscyloskop (007; 20.07.2009; arduino; processing) Sposób prezentacji danych pomiarowych w środowisku Processing opisany w artykule o pomiarze natężenia światła jest obrazowy, jednak mało przydatny. Przedstawię
Oscyloskop (007; 20.07.2009; arduino; processing) Sposób prezentacji danych pomiarowych w środowisku Processing opisany w artykule o pomiarze natężenia światła jest obrazowy, jednak mało przydatny. Przedstawię
Instrukcja integracji urządzenia na magistrali Modbus RTU
 Instrukcja integracji urządzenia na magistrali Modbus RTU wersja 1.4 1. Wyprowadzenia Rysunek 1: Widok wyprowadzeń urządzenia. Listwa zaciskowa Listwa zaciskowa Listwa zaciskowa J3 J2 J1 - wyjście analogowe
Instrukcja integracji urządzenia na magistrali Modbus RTU wersja 1.4 1. Wyprowadzenia Rysunek 1: Widok wyprowadzeń urządzenia. Listwa zaciskowa Listwa zaciskowa Listwa zaciskowa J3 J2 J1 - wyjście analogowe
Zastosowanie moduł Wi-Fi ESP-12 (1) Wirtualny interfejs szeregowy
 Wirtualny interfejs szeregowy") Zastosowanie moduł Wi-Fi ESP-12 (1) Wirtualny interfejs szeregowy UART jest jednym z interfejsów używanych do komunikacji. Jest on łatwy w obsłudze programowej i użyciu, szczególnie w wypadku komunikacji
Zastosowanie moduł Wi-Fi ESP-12 (1) Wirtualny interfejs szeregowy UART jest jednym z interfejsów używanych do komunikacji. Jest on łatwy w obsłudze programowej i użyciu, szczególnie w wypadku komunikacji
Systemy Wbudowane. Raspberry Pi komunikacja szeregowa (wersja 2019) Higiena pracy z Qt. Komunikacja szeregowa. Qt Creator i uruchamianie.
 Higiena pracy z Qt. Komunikacja szeregowa. Qt Creator i uruchamianie.") Higiena pracy z Qt W miarę możliwości tworzymy projekt z szablonu "Qt Console Application", Jeżeli nie kompiluje: Systemy Wbudowane Otworzyć plik projektu w edytorze Qt Creatora, Dodać: Raspberry Pi komunikacja
Higiena pracy z Qt W miarę możliwości tworzymy projekt z szablonu "Qt Console Application", Jeżeli nie kompiluje: Systemy Wbudowane Otworzyć plik projektu w edytorze Qt Creatora, Dodać: Raspberry Pi komunikacja
DZT WEJŚCIE Napięcie znamionowe: (U n
 DZT 6129 Licznik energii elektrycznej do sieci trójfazowej 4-przewodowej. Połączenie przez przekładnik prądowy.../5a Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V
DZT 6129 Licznik energii elektrycznej do sieci trójfazowej 4-przewodowej. Połączenie przez przekładnik prądowy.../5a Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Przemysłowy odtwarzacz plików MP3
 Przemysłowy odtwarzacz plików MP3 WWW.DIGINN.EU Spis treści 1. Opis odtwarzacza MP3... 3 2. Wyprowadzenia odtwarzacza... 4 2.1 Wymiary płytki... 6 4. Tryby pracy... 8 5. Podłączanie MP3 Playera... 9 6.
Przemysłowy odtwarzacz plików MP3 WWW.DIGINN.EU Spis treści 1. Opis odtwarzacza MP3... 3 2. Wyprowadzenia odtwarzacza... 4 2.1 Wymiary płytki... 6 4. Tryby pracy... 8 5. Podłączanie MP3 Playera... 9 6.
Teraz możesz kupić zestaw ponad 70 elementów niezbędnych do przeprowadzenia ćwiczeń z kursu u naszych dystrybutorów!
 0 Kurs #0 wykresy, liczby losowe, warunki cd. Pora na obiecaną, dodatkową część naszego kursu. Tym razem zajmiemy się kilkoma rzeczami, które usprawnią programowanie. Mowa między innymi o łączeniu warunków
0 Kurs #0 wykresy, liczby losowe, warunki cd. Pora na obiecaną, dodatkową część naszego kursu. Tym razem zajmiemy się kilkoma rzeczami, które usprawnią programowanie. Mowa między innymi o łączeniu warunków
1W-H3-04P (K)* *Litera K odnosi się do wersji czytnika ze wspólną katodą. Czytnik RFID 125 khz Unique. Karta produktu
* *Litera K odnosi się do wersji czytnika ze wspólną katodą. Czytnik RFID 125 khz Unique. Karta produktu") 1W-H3-04P (K)* Czytnik RFID 125 khz Unique Karta produktu *Litera K odnosi się do wersji czytnika ze wspólną katodą. Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji.
1W-H3-04P (K)* Czytnik RFID 125 khz Unique Karta produktu *Litera K odnosi się do wersji czytnika ze wspólną katodą. Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji.
1.10 MODUŁY KOMUNIKACYJNE
 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO 1.10 MODUŁY KOMUNIKACYJNE IC200SET001 konwerter łącza RS (RS232 lub RS485) na Ethernet (10/100Mbit), obsługiwane protokoły: SRTP, Modbus TCP IC200USB001
ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO 1.10 MODUŁY KOMUNIKACYJNE IC200SET001 konwerter łącza RS (RS232 lub RS485) na Ethernet (10/100Mbit), obsługiwane protokoły: SRTP, Modbus TCP IC200USB001
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska AVR ang. Advanced Virtual RISC Twórcami są Alf Egil Bogen, Vegard Wollan RISC Architektura AVR została opracowana przez dwóch studentów w Norweskim Instytucie
Instytut Informatyki Politechnika Poznańska AVR ang. Advanced Virtual RISC Twórcami są Alf Egil Bogen, Vegard Wollan RISC Architektura AVR została opracowana przez dwóch studentów w Norweskim Instytucie
DZT WEJŚCIE Napięcie znamionowe: (U n
 DZT 6129 Licznik energii elektrycznej do sieci trójfazowej 4-przewodowej. Połączenie przez przekładnik prądowy.../5a Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V
DZT 6129 Licznik energii elektrycznej do sieci trójfazowej 4-przewodowej. Połączenie przez przekładnik prądowy.../5a Wyjście impulsowe oraz RS485/Modbus. WEJŚCIE Napięcie znamionowe: (U n ) 3x230/400V
MiniModbus 4DI. Moduł rozszerzający 4 wejścia cyfrowe. Wyprodukowano dla
 Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
RS485 MODBUS Module 8I8RO
 Moduł rozszerzający 8 wejść cyfrowych, 8 wyjść przekaźnikowych Wersja 1.0 3.12.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną
Moduł rozszerzający 8 wejść cyfrowych, 8 wyjść przekaźnikowych Wersja 1.0 3.12.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
ze względu na jego zaokrąglony kształt musimy go umieścić w innych bloczkach np. ze zmienną: lub jeśli chcemy sprawdzić jaki właśnie znak odczytujemy:
 Ostatnio kontynuowaliśmy temat "rozmawiania" z Arduino (komunikacji z wykorzystaniem portu szeregowego), która jest nam o tyle potrzebna, że właśnie w ten sposób później będziemy rozmawiać z płytką wykorzystując
Ostatnio kontynuowaliśmy temat "rozmawiania" z Arduino (komunikacji z wykorzystaniem portu szeregowego), która jest nam o tyle potrzebna, że właśnie w ten sposób później będziemy rozmawiać z płytką wykorzystując
RS485 MODBUS Module 8I8RO
 Moduł rozszerzający 8 wejść cyfrowych, 8 wyjść przekaźnikowych Wersja 1.0 3.12.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną
Moduł rozszerzający 8 wejść cyfrowych, 8 wyjść przekaźnikowych Wersja 1.0 3.12.2014 wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi