Termometr cyfrowy DS18B20 obudowy i wyprowadzenia
|
|
|
- Natalia Łukasik
- 6 lat temu
- Przeglądów:
Transkrypt
1
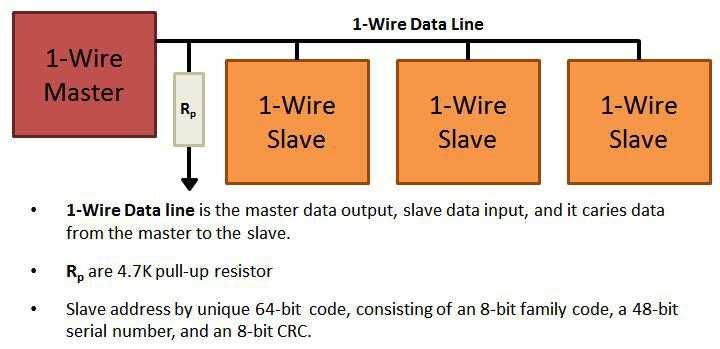
2 Magistrala 1-wire Magistrala 1-wire składa się z pojedynczej linii. Na magistrali 1-wire jedno urządzenie MASTER nadzoruje pracę jednego lub wielu urządzeń SLAVE. Urządzenie MASTER oraz wszystkie SLAVE są podłączone do magistrali wyjściem tranzystora otwarty dren lub bramką trójstanową. Takie podłączenie umożliwia zwolnienie linii przez każde z urządzeń po zakończeniu transmisji. Magistrala 1-wire wymaga zewnętrznego rezystora podciągającego do zasilania o wartości około 5kΩ. Stanem bezczynnym magistrali jest stan wysoki.

3 Termometr cyfrowy DS18B20 obudowy i wyprowadzenia Układ DS18B20 zawiera czujnik temperatury i przetwornik A/C o rozdzielczości 12-sto bitowej, co odpowiada pomiarowi temperatury z krokiem C.
4 DS18B20 zasilanie pasożytnicze Układ DS1820 może pracowaćbez zewnętrznego źródła zasilania. Moc jest dostarczana przez rezystor podwieszający pod zasilanie linię danych DQ. W stanie wysokim linii DQ ładowany jest wewnętrzny kondensator C pp który dostarcza energii urządzeniu, gdy linia danych DQ jest w stanie niskim. Ten sposób zasilania magistrali zwany jest pasożytniczym.
5 DS18B20 zasilanie zewnętrzne Ukłda DS1820 może być również zasilany ze źródła zewnętrznego
6 DS18B20 port 3-stanowy Magistrala 1-wire ma tylko jedną linię(dq). Każde urządzenie (master lub slave) podłącza się do tej linii przez wyjście otwarty kolektor tranzystora lub bramkętrój-stanową. Takie rozwiązanie umożliwia każdemu urządzeniu które nie nadaje zwolnienie magistrali, która może byćużywana przez inne podłączone urządzenie.
7 Urządzenia na magistrali 1-wire W układach cyfrowych wyjście wielko-impedancyjne (zwane równieżhi-z, wyjście trój-stanowe lub wyjście pływające ) nie ma żadnego wymuszonego stanu logicznego (poziom sygnału nie jest określany przez obwody wyjściowe). Podłączone do wyjścia nisko-impedancyjnego nie obciąży go, a jego stan logiczny przyjmie wartośćstanu układu, do którego zostanie podłączony.
8 DS18B20 - schemat
9 DS18B20 pamięci RAM i EEPROM Pamięć układu DS18B20 składa się z 8-miu rejestrów, temperatura jest zapisywana na dwóch pierwszych rejestrach: 0-wy rejestr zawiera młodszy bajt pomiaru temperatury, 1-szy rejestr zawiera starszy bajt pomiaru temperatury. Podczas transmisji na magistrali dane są nadawane począwszy od najmłodszego bitu. Rejestr 0-wy jest wysyłany przez DS18B20 jako pierwszy.
10 Rejestr temperatury Rejestr temperatury (LS byte) Bit Nazwa Rejestr temperatury (MS byte) Bit Nazwa S S S S S S bity znaku
11 Odczyt temperatury w rozdzielczości 8-bitowej Wynik pomiaru temperatury jest przekazywany przez termometr w rozdzielczości 12- bitowej na bajtach LS i MS. Ograniczenie rozdzielczości do 8-bitowej ( =1 ) polega na usunięciu bitów: 2-1, 2-2, 2-3, 2-4. W tym celu bajty LS i MS należy odpowiednio obrócić, po czym zsumować je binarnie i uzyskać na bajcie wynikowym następujący układ bitów: Bajt wynikowy zawiera temperaturę w zapisie binarnym o rozdzielczości 8-bitowej. Przed wyświetleniem na LCD liczbę binarną należy rozłożyć na kolumny (setki, dziesiątki, jedności) i zapisać każdą kolumnę w kodzie ASCII.
12 Odczyt temperatury w rozdzielczości 12-bitowej Usunięte poprzednio bity części ułamkowych temperatury 2-1, 2-2, 2-3, 2-4 należy zapisać na oddzielnej zmiennej. Rozdzielczość 12-bitowa jest równa 1/16 = 0,0625. Z porównania kolumn liczb w zapisie dwójkowym i dziesiętnym a4 a3 a2 a1 b4 b3 b2 b = ( a + 2a3 + 4a2 + 8a1) = (1000b b2 + 10b b4 wynika, że kolumnę części dziesiętnych b 1 można obliczyć mnożąc liczbę przez 625, a następnie wyznaczając część całkowitą z podziału przez Wyznacz kolumny części dziesiętnych, setnych, tysiącznych i dziesięciotysięcznych, każdą z nich przedstaw w kodzie ASCII i wyświetl na LCD. )
13 DS18B20 pamięci ROM Transmisja następuje od LSB do MSB ( od prawej do lewej)
14 DS18B20 rejestr konfiguracyjny Rejestr konfiguracyjny pozwala wybraćrozdzielczość(defaultowa po resecie jest 12-bitowa). Czas pomiaru temperatury jest odwrotnie proporcjonalny do rozdzielczości
15 Impuls Resetu i obecności Każdy transfer po magistrali rozpoczyna się od impulsu Resetu nadawanego przez urządzenie MASTER i impulsu obecności, który jest odpowiedzią urządzenia SLAVE. W czasie impulsu Resetu MASTER zwiera magistralę do masy na czas co najmniej 480 µs. Po tym czasie MASTER zwalnia magistralę, która wskutek podciągnięcia rezystorem 5k przechodzi w stan wysoki. SLAVE dokonuje detekcji zbocza narastającego, czeka µs, po czym nadaje impuls obecności zwierając magistralę do masy na czas µs.
16 Impuls Resetu i obecności procedura uproszczona Mikrokontrolery nie posiadają interfejsu do magistrali 1-wire. W związku z tym magistralę 1-wire można umieścić na dowolnej linii mikrokontrolera np. 5 linia portu B. Wówczas na liniach portu D można umieścić 8 diod pomocniczych w uruchamianiu programu. Definicja impulsu resetu zawiera opis kształtu impulsu przedstawiony na rysunku (w przykładzie pomijamy odczyt impulsu obecności) void reset (void) { //magistrala 1-wire jako output //magistrala 1-wire w stan wysoki //odczekaj 5us //magistrala w stan niski //odczekaj 500us //magistrala w stan wysoki //odczekaj 500us pomijamy odczyt impulsu obecności }
17 Impuls Resetu i obecności W tym rozwiniętym przykładzie MASTER nadaje impuls reset i odczytuje impuls obecności void reset (void) { //magistrala 1-wire jako output //magistrala 1-wire w stan wysoki //odczekaj 5us czas nie restrykcyjny //magistrala w stan niski //odczekaj 500us //magistrala w stan wysoki //odczekaj 60us //magistrala jako wejście //podwieszenie wejścia (magistrali) pod zasilanie (wewnetrzne) //odczyt stanu magistrali //if( stan magistrali == HIGH) //SLAVE nieobecny (wyświetl tekst) //else // SLAVE obecny (wyświetl tekst) //odczekaj 500us //magistrala 1-wire jako output //magistrala 1-wire w stan wysoki }
18 Ramka nadawcza Stany logiczne: 0 i 1 są nadawane w ramkach czasowych. Każda ramka czasowa trwa co najmniej 60 µs, z odstępem między ramkami co najmniej 1µs. Rysunek przedstawia ramki obu stanów logicznych obie ramki rozpoczynają się od zbocza opadającego.
19 Impulsy stanów logicznych Definicja impulsu stanu logicznego 0 (lewa połowa rysunku z poprzedniego slajdu) void impuls0 (void) { //magistrala 1-wire jako output //magistrala 1-wire w stan wysoki //odczekaj 5us //magistrala w stan niski //odczekaj 80us //magistrala w stan wysoki //odczekaj 10us } Definicja impulsu stanu logicznego 1 (prawa połowa rysunku z poprzedniego slajdu) void impuls1 (void) {//do samodzielnego wypełnienia wg. rysunku }
20 Procedura nadania bajtu (8 bitów) Bajt nadajemy bit po bicie rozpoczynając od najmłodszego bitu, czyli przez obrót bajtu w prawo void nadaj (char A) { //magistrala 1-wire jako output //magistrala 1-wire w stan wysoki for (..) //8 obrotów pętli dla 8-miu bitów { if (selekcja najmłodszego bitu zmiennej A) ) impuls1(); //impuls logicznej else impuls0(); //impuls logicznego 0. //obrót bajtu w prawo } //sprawdzenie wartości najmłodszego bitu }
21 Ramka odbiorcza MASTER generuje zbocze opadające i podtrzymuje stan niski co najmniej przez 1 µs, po czym zwalnia magistralę, która wskutek powieszenia przechodzi w stan wysoki. Teraz SLAVE może zewrzeć magistralę do masy (gdy nadaje logiczne 0 ) lub pozostawić ją w stanie wysokim (gdy nadaje logiczną 1). MASTER odczytuje stan magistrali przed upływem 15 µs od rozpoczęcia ramki.
22 Procedura odbioru bajtu (8 bitów) Bajt odbieramy bit po bicie wsuwając bity przychodzące po magistrali na najstarszą (7-mą) pozycję zmiennej B i obracając zmienną B w prawo char odbierz (void) { for (.) //8 obrotów pętli dla 8-miu bitów { B=B>>1; //obrót bajtu w prawo //magistrala 1-wire jako output //magistrala 1-wire w stan wysoki //5us //magistrala 1-wire w stan niski //5us //magistrala 1-wire jako input //magistrala 1-wire podwieszona do zasilania (wewnętrznie) //10us if (.) //odczyt stanu magistrali B = 0b ; //odebrano stan 1 else. //odebrano stan 0 //delay. us } //magistrala 1-wire jako output //magistrala 1-wire w stan wysoki return..; }
23 Komendy adresowane do pamięci ROM

24 Komendy adresowane do pamięci scratchpad
25 Sesja komunikacyjna po magistrali 1-wire z termometrem DS18B20 TRYB URZĄDZENIA MASTER DANE (NAMŁODSZY BIT JAKO 1-SZY) KOMENTARZ TX Impuls resetu Master generuje impuls resetu RX Impuls obecności DS18B20 odpowiada impulsem obecności TX $CC Master wydaje rozkaz pominięcia odczytu pamięci ROM TX $44 Master wydaje rozkaz pomiaru temperatury TX Podciągnięcie linii Master utrzymuje magistralę w stanie wysokim czas pomiaru = 1000ms TX Impuls resetu Master generuje impuls resetu RX Impuls obecności DS18B20 odpowiada impulsem obecności TX $CC Master wydaje rozkaz pominięcia odczytu pamięci ROM TX $BE Master wydaje rozkaz odczytu pamięci RAM urządzenia RX Odczyt 2-ch słów Master odczytuje wynik pomiaru temperatury
26 Search ROM Command (F0H) Komenda F0H (search ROM) pozwala odczytać numery identyfikacyjne urządzeń na magistrali (przy założeniu, że na magistrali jest więcej niż jedno urządzenie) Wszystkie urządzenia ma magistrali mają wyjścia typu otwarty kolektor. Po podłączeniu tych urządzeń do jednej linii (1-wire) stan magistrali jest wynikiem hardwarowej operacji logicznej AND (koniunkcja hardwarowa). Proces rozpoczyna się następująco: - wszystkie urządzenia wysyłają na magistralę bity LSB rejestru ROM - master odczytuje wynik koniunkcji bitów LSB wszystkich urządzeń - wszystkie urządzenia wysyłają na magistralę negację bitu LSB rejestru ROM - master odczytuje wynik koniunkcji negacji bitów LSB wszystkich urządzeń - master podejmuje decyzję wg tabeli - master zapisuje na magistrali pożądaną wartość bitu LSB - tym samym wydaje rozkaz przejścia w stan high-z urządzeniom o niezgodnym bicie LSB - itd. do bitu 63 (MSB). W powyższym procesie master odczytuje numer jednego urządzenia. Następnie urządzenie już odczytane przechodzi w stan high-z, a proces zaczyna się ponownie dla urządzeń o numerach jeszcze nie odczytanych.
27 Search ROM Command (F0H) przykład Device 1: xxxxx Device 2: xxxxx Device 3: xxxxx Device 4: xxxxx bity koniunkcja bitów koniunkcja negacji bitów wniosek decyzja Urządzenia aktywne: 1-4 LSB: Sązera i jedynki Urządzenia 2 i 3 odłączają się(high-z) Urządzenia aktywne: 1 i 4 Bity: Sąsame zera Żadne z urządzeńnie odłącza się Urządzenia aktywne: 1 i 4 Bity: Sązera i jedynki Urządzenie 1 odłącza się Urządzenie aktywne: 4 Bit: Bit równy zero Urządzenie aktywne: 4 Bit: Bit równy jeden Itd. do końca Odczytano numer seryjny urządzenia 4 Urządzenia 4 przechodzi w stan high-z, a pozostałe uczestniczą w kolejnym przebiegu Kolejne urządzenia przechodzą w stan high-z, aż do ostatniego urządzenia
28 Library functions // wykonaj reset magistrali (wymiana impulsów resetu i obecności na dzień dobry ) uint8_t reset(void); // zaadresuj urządzenie na magistrali o numerze ROM podanym w tablicy rom[8], komenda 0x55 void select(const uint8_t rom[8]); // Pomiń adresowanie urządzenia na magistrali, można stosować tylko, gdy na magistrali znajduje się jedno urządzenie, komenda 0xCC void skip(void); //Wyślij na magistralę 1 bajt (parametr v), parametr power wskazuje, czy po wysłaniu bajtu v magistrala ma przejść w stan wielkiej impedancji (power =0), czy pozostać w stanie wysokim i pobierać energie (power = 1) void write(uint8_t v, uint8_t power = 0); void write_bytes(const uint8_t *buf, uint16_t count, bool power = 0); // Odczytaj jeden bajt uint8_t read(void); void read_bytes(uint8_t *buf, uint16_t count);
29 Library functions // Reset stanu poszukiwania urządzeń na magistrali void reset_search(); // Odczyt kodu rodzinnego urządzenia kod zostaje zapisany w zmiennej family_code void target_search(uint8_t family_code); // Poszukuje urządzeń na magistrali // Odczytuje po 1-wire 8 bajtów numeru urządzenia z pamięci ROM i zapisuje do tablicy // wskazanej przez *newaddr, zwraca 1 jeśli znaleziono nowe urządzenie na magistrali, // zwraca 0, jeśli brak urządzeń lub numery ROM wszystkich urządzeń // zostały już odczytane, parametr search_mode = 0 wywołuje komendę 0xF0, // search_mode=1 wywołuje komendę 0xEC uint8_t search(uint8_t *newaddr, bool search_mode = true); // Oblicza Dallas Semiconductor 8bit CRC, rozpoczynając od bajtu *addr, dla len bajtów, static uint8_t crc8(const uint8_t *addr, uint8_t len);
30 #include <OneWire.h> OneWire ds(10); //utworzenie egzemplarza klasy OneWire byte addr[8]; ds.search(addr); if (ds.crc8(addr, 7)!= addr[7])... ; ds.reset(); ds.select(addr); // start conversion, with parasite power on at the end ds.write(0x44, 1); delay(1000); // maybe 750ms is enough, maybe not ds.reset(); ds.select(addr); ds.write(0xbe); // Read Scratchpad for ( i = 0; i < 9; i++) { // we need 9 bytes data[i] = ds.read(); Serial.println(data[i], HEX);} Serial.print(" CRC="); Serial.print(OneWire::crc8(data, 8), HEX); Serial.println(); int16_t raw = (data[1] << 8) data[0]; celsius = (float)raw / 16.0; Serial.print(" Temperature = "); Serial.print(celsius); Serial.print(" Celsius, ");
 - 64-bitowy rejestr aplikacji jednokrotnie programowalny - 64-bitowa pamięć tymczasowa (pośredniczy przy zapisie rejestru aplikacji) - 8-bitowy rejestr statusowy")
31 DS bit 1wire EEPROM Główne sekcje pamięci DS bit 1wire EEPROM: - 64-bitowa pamięć ROM (laserowo wypalona) bitowa pamięć danych EEPROM bitowy pamięć tymczasowa (pośredniczy przy zapisie i odczycie z EEPROM) - 64-bitowy rejestr aplikacji jednokrotnie programowalny - 64-bitowa pamięć tymczasowa (pośredniczy przy zapisie rejestru aplikacji) - 8-bitowy rejestr statusowy (status rejestru aplikacji: zapisany/nie zapisany) Main memory sections: - 64-bit lasered ROM bit data memory bit scratchpad - 64-bit OTP application register (OTP- One Time Programmable) - 64-bit scratchpad - 8-bit status memory
32 Schemat blokowy układu DS2430
33 DS2430 mapa pamięci
34 Komendy DS2430
35 DS2430 pamięć ROM Master musi najpierw wysłaćjednąz komend adresowanych do pamięci ROM (Read ROM, Match ROM, Search ROM lub Skip ROM). Po wykonaniu komendy ROM Master może wydawać komendy adresowane do innych pamięci
36 Komendy adresowane do pamięci ROM
37 DS algorytm zapisu i odczytu pamięci
38 DS2430 przykłady użycia komend
")

39 AM2302 (DHT22) moduł temperatury i wilgotności
40 AM2302 (DHT22) protokół i przykład
41
42

43 1-wire IButton
44 CRC - Cyclic Redundancy Code CRC (Cyclic Redundancy Code) jest resztą z dzielenia wielomianów: dzielnik i dzielna są traktowane jako ciągi (liczby) binarne, dzielenia następuje wg. zasad arytmetyki binarnej modulo 2, wynik dzielenia jest nieistotny (pomijany), reszta z dzielenia (CRC) jest dopisywana do ciągu przesyłanych danych Odbiornik dzieli otrzymany ciąg z dołączonym CRC przez ten sam wielomian, jeśli wynik dzielenia jest różny od zera, to w transmisji wystąpiłbłąd. Obliczenia CRC mogą być: stablicowane lub wykonywane na bazie procedur.
45 Arytmetyka binarna modulo 2 W arytmetyce binarnej dodawanie i odejmowanie modulo dwa są wykonywane bez przeniesienia suma różnica = = = = 0 W arytmetyce binarnej modulo 2 suma i różnica są dają identyczny rezultat. Z tego powodu nie można tradycyjnie porównywać liczb pod względem relacji większa/mniejsza. Liczba X jest większa lub równa liczbie Y jeżeli pozycja najstarszego bitu liczby X jest taka sama lub większa niż pozycja najstarszego bitu Y. np. 101 jest mniejsze niż 1010
46 Przykład dzielenia w arytmetyce binarnej modulo dwa
47 DS18B20 wielomian CRC Ciąg danych: Dzielimy przez wielomian W tym celu ciąg danych uzupełniamy o 8 zer liczymy sumę modulo liczymy sumę modulo liczymy sumę modulo 2 itd. aż do uzyskania 8-bitowej reszty z dzielenia
48 Nadajnik transmituje bity danych uzupełnione o bity reszty z dzielenia wielomianów CRC8 lub CRC16 CRC 8 =x 8 +x 5 +x = 0x31 CRC 16 =x 16 +x 15 +x =0x8005 Wybiera się takie wielomiany, dla których rozkład 0 i 1 wielomianu oraz wielokrotności wielomianu nie przypomina rozkładu szumu (równomiernego) Odbiornik dzieli otrzymany ciąg łącznie z bitami reszty CRC przez ten sam wielomian CRC 8 (lub CRC 16 ). Jeżeli reszta z dzielenia =0, ciąg nie został przekłamany.
49 Generator hardwarowy CRC16 i CRC8
50 unsigned int crc16(unsigned char c) { unsigned int crc, j; for (j=0; j<8; j++) { if ((crc^(unsigned int) c) & 0x0001) { crc = (crc ^ 0x8005); } else; crc = crc >>1; c = c >> 1; } return crc; } //////////////////////////////////////////////////////////////////////////////////////////////// int main(void) { unsigned char ciag[15]; unsigned int i, oblcrc; ciag[0] = 'H'; ciag[1] = '1';. crc=0; for (i=0; i<12; i++) { oblcrc = crc16(ciag[i]); } return 0; }
51 CRC 8 =x 8 +x 5 +x W odwrotnym porządku bitów = 0x8c uint8_t OneWire::crc8(const uint8_t *addr, uint8_t len) { uint8_t crc = 0; } while (len--) { } return crc; uint8_t inbyte = *addr++; for (uint8_t i = 8; i; i--) } { uint8_t mix = (crc ^ inbyte) & 0x01; crc >>= 1; if (mix) crc ^= 0x8C; inbyte >>= 1;
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Spis tre 1. Przedstawienie standardu 1-wire... 2. Dokumentacja układu DS18B20... 3. Obsługa termometru DS18B20 w j
 OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20 wydanie pierwsze Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2008 1 Spis treści
OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20 wydanie pierwsze Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2008 1 Spis treści
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 MAGISTRALA 1-WIRE
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 MAGISTRALA 1-WIRE Opracował: dr inŝ. Wojciech Wojtkowski
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 MAGISTRALA 1-WIRE Opracował: dr inŝ. Wojciech Wojtkowski
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska Proces transmisji może w prowadzać błędy do przesyłanych wiadomości błędy pojedyncze lub grupowe Detekcja: Wymaga uznania, że niektóre wiadomości są nieważne
Instytut Informatyki Politechnika Poznańska Proces transmisji może w prowadzać błędy do przesyłanych wiadomości błędy pojedyncze lub grupowe Detekcja: Wymaga uznania, że niektóre wiadomości są nieważne
1.1. Pozycyjne systemy liczbowe
 1.1. Pozycyjne systemy liczbowe Systemami liczenia nazywa się sposób tworzenia liczb ze znaków cyfrowych oraz zbiór reguł umożliwiających wykonywanie operacji arytmetycznych na liczbach. Dla dowolnego
1.1. Pozycyjne systemy liczbowe Systemami liczenia nazywa się sposób tworzenia liczb ze znaków cyfrowych oraz zbiór reguł umożliwiających wykonywanie operacji arytmetycznych na liczbach. Dla dowolnego
Systemy wbudowane Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20
 Systemy wbudowane Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 Dokumentacja projektu. Temat projektu: Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 zrealizowana z wykorzystaniem
Systemy wbudowane Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 Dokumentacja projektu. Temat projektu: Obsługa interfejsu 1-Wire na przykładzie termometru DS18B20 zrealizowana z wykorzystaniem
OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20
 OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20 wydanie drugie Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2010 cezary.klimasz@gmail.com
OBSŁUGA INTERFEJSU 1-WIRE NA PRZYKŁADZIE DS18B20 wydanie drugie Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2010 cezary.klimasz@gmail.com
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
16. Szeregowy interfejs SPI
 16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
Przetwornik analogowo-cyfrowy
 Przetwornik analogowo-cyfrowy Przetwornik analogowo-cyfrowy A/C (ang. A/D analog to digital; lub angielski akronim ADC - od słów: Analog to Digital Converter), to układ służący do zamiany sygnału analogowego
Przetwornik analogowo-cyfrowy Przetwornik analogowo-cyfrowy A/C (ang. A/D analog to digital; lub angielski akronim ADC - od słów: Analog to Digital Converter), to układ służący do zamiany sygnału analogowego
1W-H3-05(K)* Czytnik RFID 125 khz Unique. Instrukcja
* Czytnik RFID 125 khz Unique. Instrukcja") 1W-H3-05(K)* Czytnik RFID 125 khz Unique Instrukcja *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem Proszę nie
1W-H3-05(K)* Czytnik RFID 125 khz Unique Instrukcja *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem Proszę nie
Arytmetyka liczb binarnych
 Wartość dwójkowej liczby stałoprzecinkowej Wartość dziesiętna stałoprzecinkowej liczby binarnej Arytmetyka liczb binarnych b n-1...b 1 b 0,b -1 b -2...b -m = b n-1 2 n-1 +... + b 1 2 1 + b 0 2 0 + b -1
Wartość dwójkowej liczby stałoprzecinkowej Wartość dziesiętna stałoprzecinkowej liczby binarnej Arytmetyka liczb binarnych b n-1...b 1 b 0,b -1 b -2...b -m = b n-1 2 n-1 +... + b 1 2 1 + b 0 2 0 + b -1
UW-DAL-MAN v2 Dotyczy urządzeń z wersją firmware UW-DAL v5 lub nowszą.
 Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
Systemy Wbudowane. Arduino C. Arduino C - stałe. Arduino C - Stałe. Arduino C - Stałe. Funkcje matematyczne. Arduino C - Stałe
 Arduino C - stałe Systemy Wbudowane Arduino C Wersja 2018 Unikać redefiniowania istniejących stałych. Stosowane dla polepszenia zrozumiałości kodu. Lepiej HIGH niż 0x01 Lepiej INPUT_PULLUP niż 0x2 Uwzględniają
Arduino C - stałe Systemy Wbudowane Arduino C Wersja 2018 Unikać redefiniowania istniejących stałych. Stosowane dla polepszenia zrozumiałości kodu. Lepiej HIGH niż 0x01 Lepiej INPUT_PULLUP niż 0x2 Uwzględniają
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne.
 Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
1W-H3-04P (K)* *Litera K odnosi się do wersji czytnika ze wspólną katodą. Czytnik RFID 125 khz Unique. Karta produktu
* *Litera K odnosi się do wersji czytnika ze wspólną katodą. Czytnik RFID 125 khz Unique. Karta produktu") 1W-H3-04P (K)* Czytnik RFID 125 khz Unique Karta produktu *Litera K odnosi się do wersji czytnika ze wspólną katodą. Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji.
1W-H3-04P (K)* Czytnik RFID 125 khz Unique Karta produktu *Litera K odnosi się do wersji czytnika ze wspólną katodą. Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji.
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
SYSTEMY LICZBOWE. Zapis w systemie dziesiętnym
 SYSTEMY LICZBOWE 1. Systemy liczbowe Najpopularniejszym systemem liczenia jest system dziesiętny, który doskonale sprawdza się w życiu codziennym. Jednak jego praktyczna realizacja w elektronice cyfrowej
SYSTEMY LICZBOWE 1. Systemy liczbowe Najpopularniejszym systemem liczenia jest system dziesiętny, który doskonale sprawdza się w życiu codziennym. Jednak jego praktyczna realizacja w elektronice cyfrowej
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
MS360-LPM. wersja 1.09 (wersja robocza) Dokumentacja użytkownika
 Dokumentacja użytkownika") MS360-LPM wersja 1.09 (wersja robocza) Dokumentacja użytkownika Białystok 2011 Podstawy Komunikacja z multiczujnikiem MS360-LPM dostępna jest za pomocą transmisji szeregowej EIA-485 (wcześniej RS-485)
MS360-LPM wersja 1.09 (wersja robocza) Dokumentacja użytkownika Białystok 2011 Podstawy Komunikacja z multiczujnikiem MS360-LPM dostępna jest za pomocą transmisji szeregowej EIA-485 (wcześniej RS-485)
Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...
 Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...4 Podział układów logicznych...6 Cyfrowe układy funkcjonalne...8 Rejestry...8
Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...4 Podział układów logicznych...6 Cyfrowe układy funkcjonalne...8 Rejestry...8
1W-H0-04P (K)* *Litera K odnosi się do wersji czytnika ze wspólną katodą. Czytnik RFID MHz Mifare. Karta produktu
* *Litera K odnosi się do wersji czytnika ze wspólną katodą. Czytnik RFID MHz Mifare. Karta produktu") 1W-H0-04P (K)* Czytnik RFID 13.56 MHz Mifare Karta produktu *Litera K odnosi się do wersji czytnika ze wspólną katodą. Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji.
1W-H0-04P (K)* Czytnik RFID 13.56 MHz Mifare Karta produktu *Litera K odnosi się do wersji czytnika ze wspólną katodą. Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji.
Expandery wejść MCP23S17 oraz MCP23017
 Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
Expandery wejść MCP23S17 oraz MCP23017 Expander I/O MCP20S17 I2C Piny wyjściowe expanderów MCP23S17 oraz MCP23017 Expander I/O MCP23S17 SPI Podłączenie urządzenia na magistrali SPI z płytą Arduino. Linie
Samodzielnie wykonaj następujące operacje: 13 / 2 = 30 / 5 = 73 / 15 = 15 / 23 = 13 % 2 = 30 % 5 = 73 % 15 = 15 % 23 =
 Systemy liczbowe Dla każdej liczby naturalnej x Î N oraz liczby naturalnej p >= 2 istnieją jednoznacznie wyznaczone: liczba n Î N oraz ciąg cyfr c 0, c 1,..., c n-1 (gdzie ck Î {0, 1,..., p - 1}) taki,
Systemy liczbowe Dla każdej liczby naturalnej x Î N oraz liczby naturalnej p >= 2 istnieją jednoznacznie wyznaczone: liczba n Î N oraz ciąg cyfr c 0, c 1,..., c n-1 (gdzie ck Î {0, 1,..., p - 1}) taki,
2010-04-12. Magistrala LIN
 Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Opis czytnika TRD-FLAT CLASSIC ver. 1.1. Naścienny czytnik transponderów UNIQUE w płaskiej obudowie
 TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
SYSTEMY LICZBOWE 275,538 =
 SYSTEMY LICZBOWE 1. Systemy liczbowe Najpopularniejszym systemem liczenia jest system dziesiętny, który doskonale sprawdza się w życiu codziennym. Jednak jego praktyczna realizacja w elektronice cyfrowej
SYSTEMY LICZBOWE 1. Systemy liczbowe Najpopularniejszym systemem liczenia jest system dziesiętny, który doskonale sprawdza się w życiu codziennym. Jednak jego praktyczna realizacja w elektronice cyfrowej
1. Operacje logiczne A B A OR B
 1. Operacje logiczne OR Operacje logiczne są operacjami działającymi na poszczególnych bitach, dzięki czemu można je całkowicie opisać przedstawiając jak oddziałują ze sobą dwa bity. Takie operacje logiczne
1. Operacje logiczne OR Operacje logiczne są operacjami działającymi na poszczególnych bitach, dzięki czemu można je całkowicie opisać przedstawiając jak oddziałują ze sobą dwa bity. Takie operacje logiczne
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011
 Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
DYDAKTYKA ZAGADNIENIA CYFROWE ZAGADNIENIA CYFROWE
 ZAGADNIENIA CYFROWE ZAGADNIENIA CYFROWE @KEMOR SPIS TREŚCI. SYSTEMY LICZBOWE...3.. SYSTEM DZIESIĘTNY...3.2. SYSTEM DWÓJKOWY...3.3. SYSTEM SZESNASTKOWY...4 2. PODSTAWOWE OPERACJE NA LICZBACH BINARNYCH...5
ZAGADNIENIA CYFROWE ZAGADNIENIA CYFROWE @KEMOR SPIS TREŚCI. SYSTEMY LICZBOWE...3.. SYSTEM DZIESIĘTNY...3.2. SYSTEM DWÓJKOWY...3.3. SYSTEM SZESNASTKOWY...4 2. PODSTAWOWE OPERACJE NA LICZBACH BINARNYCH...5
Arytmetyka komputera. Na podstawie podręcznika Urządzenia techniki komputerowej Tomasza Marciniuka. Opracował: Kamil Kowalski klasa III TI
 Arytmetyka komputera Na podstawie podręcznika Urządzenia techniki komputerowej Tomasza Marciniuka Opracował: Kamil Kowalski klasa III TI Spis treści 1. Jednostki informacyjne 2. Systemy liczbowe 2.1. System
Arytmetyka komputera Na podstawie podręcznika Urządzenia techniki komputerowej Tomasza Marciniuka Opracował: Kamil Kowalski klasa III TI Spis treści 1. Jednostki informacyjne 2. Systemy liczbowe 2.1. System
Sieci Komputerowe Mechanizmy kontroli błędów w sieciach
 Sieci Komputerowe Mechanizmy kontroli błędów w sieciach dr Zbigniew Lipiński Instytut Matematyki i Informatyki ul. Oleska 48 50-204 Opole zlipinski@math.uni.opole.pl Zagadnienia Zasady kontroli błędów
Sieci Komputerowe Mechanizmy kontroli błędów w sieciach dr Zbigniew Lipiński Instytut Matematyki i Informatyki ul. Oleska 48 50-204 Opole zlipinski@math.uni.opole.pl Zagadnienia Zasady kontroli błędów
Opis czytnika TRD-80 CLASSIC ver Moduł czytnika transponderów UNIQUE z wbudowaną anteną
 TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
MiniModbus 4DO. Moduł rozszerzający 4 wyjścia cyfrowe. Wyprodukowano dla. Instrukcja użytkownika
 Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
MiniModbus 4DI. Moduł rozszerzający 4 wejścia cyfrowe. Wyprodukowano dla
 Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
RS-H0-05 (K)* Czytnik RFID MHz Mifare. Karta użytkownika
* Czytnik RFID MHz Mifare. Karta użytkownika") RS-H0-05 (K)* Czytnik RFID 13.56 MHz Mifare Karta użytkownika *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem
RS-H0-05 (K)* Czytnik RFID 13.56 MHz Mifare Karta użytkownika *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem
Kod U2 Opracował: Andrzej Nowak
 PODSTAWY TEORII UKŁADÓW CYFROWYCH Kod U2 Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ System zapisu liczb ze znakiem opisany w poprzednim
PODSTAWY TEORII UKŁADÓW CYFROWYCH Kod U2 Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ System zapisu liczb ze znakiem opisany w poprzednim
WYKŁAD 8. Funkcje i algorytmy rekurencyjne Proste przykłady. Programy: c3_1.c..., c3_6.c. Tomasz Zieliński
 WYKŁAD 8 Funkcje i algorytmy rekurencyjne Proste przykłady Programy: c3_1.c..., c3_6.c Tomasz Zieliński METODY REKURENCYJNE (1) - program c3_1 ======================================================================================================
WYKŁAD 8 Funkcje i algorytmy rekurencyjne Proste przykłady Programy: c3_1.c..., c3_6.c Tomasz Zieliński METODY REKURENCYJNE (1) - program c3_1 ======================================================================================================
MiniModbus 4DI-M. Moduł rozszerzający 4 wejścia cyfrowe z pamięcią liczników. Wyprodukowano dla
 Wersja 1.1 8.04.2014 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.1 8.04.2014 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
1W-H3U-05. Czytnik RFID 125 khz UNIQUE. Karta produktu
 1W-H3U-05 Czytnik RFID 125 khz UNIQUE Karta produktu Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji. Skutkuje to brakiem uwzględniania ewentualnej reklamacji. W przypadku
1W-H3U-05 Czytnik RFID 125 khz UNIQUE Karta produktu Przed użyciem Proszę nie otwierać czytnika i nie przeprowadzać własnych modyfikacji. Skutkuje to brakiem uwzględniania ewentualnej reklamacji. W przypadku
Wstęp do informatyki- wykład 2
 MATEMATYKA 1 Wstęp do informatyki- wykład 2 Systemy liczbowe Treści prezentowane w wykładzie zostały oparte o: S. Prata, Język C++. Szkoła programowania. Wydanie VI, Helion, 2012 www.cplusplus.com Jerzy
MATEMATYKA 1 Wstęp do informatyki- wykład 2 Systemy liczbowe Treści prezentowane w wykładzie zostały oparte o: S. Prata, Język C++. Szkoła programowania. Wydanie VI, Helion, 2012 www.cplusplus.com Jerzy
Konwerter 1 Wire > SPI opisany P R Ow JVerilogu
 Konwerter 1 Wire > SPI opisany P R Ow JVerilogu E K T Y Konwerter 1 Wire > SPI opisany w Verilogu, część 1 AVT 443 Prezentowany konwerter jest przeznaczony szczególnie do współpracy z układami termometrów
Konwerter 1 Wire > SPI opisany P R Ow JVerilogu E K T Y Konwerter 1 Wire > SPI opisany w Verilogu, część 1 AVT 443 Prezentowany konwerter jest przeznaczony szczególnie do współpracy z układami termometrów
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Sterowanie podczerwienią, zaawansowane tryby liczników Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 8 grudnia 2016 Sterowanie podczerwienią
Programowanie mikrokontrolerów 2.0 Sterowanie podczerwienią, zaawansowane tryby liczników Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 8 grudnia 2016 Sterowanie podczerwienią
f we DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu
 DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu f wy f P Podzielnik częstotliwości: układ, który na każde p impulsów na wejściu daje
DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu f wy f P Podzielnik częstotliwości: układ, który na każde p impulsów na wejściu daje
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Zasady arytmetyki stałoprzecinkowej oraz operacji arytmetycznych w formatach Q
 LABORAORIUM PROCESORY SYGAŁOWE W AUOMAYCE PRZEMYSŁOWEJ Zasady arytmetyki stałoprzecinkowej oraz operacji arytmetycznych w formatach Q 1. Zasady arytmetyki stałoprzecinkowej. Kody stałopozycyjne mają ustalone
LABORAORIUM PROCESORY SYGAŁOWE W AUOMAYCE PRZEMYSŁOWEJ Zasady arytmetyki stałoprzecinkowej oraz operacji arytmetycznych w formatach Q 1. Zasady arytmetyki stałoprzecinkowej. Kody stałopozycyjne mają ustalone
Mini Modbus 1AI. Moduł rozszerzający 1 wejście analogowe, 1 wyjście cyfrowe. Wyprodukowano dla
 Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 18.04.2013 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach
 Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
Protokół komunikacyjny sondy cyfrowej CS-26/RS-485 (lub RS-232)
") 2011-07-04 Protokół komunikacyjny sondy cyfrowej CS-26/RS-485 (lub RS-232) Parametry transmisji : 9600, N, 8, 1 Sonda CS-26/RS-485 dołączona do interfejsu RS-485 pracuje poprawnie w trybie half-duplex.
2011-07-04 Protokół komunikacyjny sondy cyfrowej CS-26/RS-485 (lub RS-232) Parametry transmisji : 9600, N, 8, 1 Sonda CS-26/RS-485 dołączona do interfejsu RS-485 pracuje poprawnie w trybie half-duplex.
ARCHITEKRURA KOMPUTERÓW Kodowanie liczb ze znakiem 27.10.2010
 ARCHITEKRURA KOMPUTERÓW Kodowanie liczb ze znakiem 27.10.2010 Do zapisu liczby ze znakiem mamy tylko 8 bitów, pierwszy od lewej bit to bit znakowy, a pozostałem 7 to bity na liczbę. bit znakowy 1 0 1 1
ARCHITEKRURA KOMPUTERÓW Kodowanie liczb ze znakiem 27.10.2010 Do zapisu liczby ze znakiem mamy tylko 8 bitów, pierwszy od lewej bit to bit znakowy, a pozostałem 7 to bity na liczbę. bit znakowy 1 0 1 1
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Wstęp do informatyki- wykład 1 Systemy liczbowe
 1 Wstęp do informatyki- wykład 1 Systemy liczbowe Treści prezentowane w wykładzie zostały oparte o: S. Prata, Język C++. Szkoła programowania. Wydanie VI, Helion, 2012 www.cplusplus.com Jerzy Grębosz,
1 Wstęp do informatyki- wykład 1 Systemy liczbowe Treści prezentowane w wykładzie zostały oparte o: S. Prata, Język C++. Szkoła programowania. Wydanie VI, Helion, 2012 www.cplusplus.com Jerzy Grębosz,
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Stan wysoki (H) i stan niski (L)
 i stan niski (L)") PODSTAWY Przez układy cyfrowe rozumiemy układy, w których w każdej chwili występują tylko dwa (zwykle) możliwe stany, np. tranzystor, jako element układu cyfrowego, może być albo w stanie nasycenia, albo
PODSTAWY Przez układy cyfrowe rozumiemy układy, w których w każdej chwili występują tylko dwa (zwykle) możliwe stany, np. tranzystor, jako element układu cyfrowego, może być albo w stanie nasycenia, albo
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Enkoder magnetyczny AS5040.
 Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Przykładowe pytania DSP 1
 Przykładowe pytania SP Przykładowe pytania Systemy liczbowe. Przedstawić liczby; -, - w kodzie binarnym i hexadecymalnym uzupełnionym do dwóch (liczba 6 bitowa).. odać dwie liczby binarne w kodzie U +..
Przykładowe pytania SP Przykładowe pytania Systemy liczbowe. Przedstawić liczby; -, - w kodzie binarnym i hexadecymalnym uzupełnionym do dwóch (liczba 6 bitowa).. odać dwie liczby binarne w kodzie U +..
Inż. Kamil Kujawski Inż. Krzysztof Krefta. Wykład w ramach zajęć Akademia ETI
 Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Opis procedur asemblera AVR
 Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
ĆWICZENIE 5. TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM
 ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
Pracownia Komputerowa wykład IV
 Pracownia Komputerowa wykład IV dr Magdalena Posiadała-Zezula http://www.fuw.edu.pl/~mposiada/pk16 1 Reprezentacje liczb i znaków! Liczby:! Reprezentacja naturalna nieujemne liczby całkowite naturalny
Pracownia Komputerowa wykład IV dr Magdalena Posiadała-Zezula http://www.fuw.edu.pl/~mposiada/pk16 1 Reprezentacje liczb i znaków! Liczby:! Reprezentacja naturalna nieujemne liczby całkowite naturalny
Instrukcja do ćwiczeń nr 4 typy i rodzaje zmiennych w języku C dla AVR, oraz ich deklarowanie, oraz podstawowe operatory
 Instrukcja do ćwiczeń nr 4 typy i rodzaje zmiennych w języku C dla AVR, oraz ich deklarowanie, oraz podstawowe operatory Poniżej pozwoliłem sobie za cytować za wikipedią definicję zmiennej w informatyce.
Instrukcja do ćwiczeń nr 4 typy i rodzaje zmiennych w języku C dla AVR, oraz ich deklarowanie, oraz podstawowe operatory Poniżej pozwoliłem sobie za cytować za wikipedią definicję zmiennej w informatyce.
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Opis czytnika TRD-FLAT 2LN ver Naścienny czytnik transponderów UNIQUE w płaskiej obudowie
 TRD-FLAT 2LN Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 9V do 12V połączenie z kontrolerem tylko dwoma przewodami POWER w kolorze żółtym czerwono-zielony
TRD-FLAT 2LN Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 9V do 12V połączenie z kontrolerem tylko dwoma przewodami POWER w kolorze żółtym czerwono-zielony
MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN
 MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
Ultradźwiękowy generator mocy MARP wersja Dokumentacja techniczno-ruchowa
 Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Sp. z o.o. ul. Otwarta 10a PL-50-212 Wrocław tel.: +48 (071) 329 68 54 fax.: +48 (071) 329 68 52 e-mail: optel@optel.pl http://www.optel.pl Ultradźwiękowy generator
Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Sp. z o.o. ul. Otwarta 10a PL-50-212 Wrocław tel.: +48 (071) 329 68 54 fax.: +48 (071) 329 68 52 e-mail: optel@optel.pl http://www.optel.pl Ultradźwiękowy generator
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych. Instrukcja do ćwiczenia laboratoryjnego
 Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
LICZNIKI Liczniki scalone serii 749x
 LABOATOIUM PODSTAWY ELEKTONIKI LICZNIKI Liczniki scalone serii 749x Cel ćwiczenia Zapoznanie się z budową i zasadą działania liczników synchronicznych i asynchronicznych. Poznanie liczników dodających
LABOATOIUM PODSTAWY ELEKTONIKI LICZNIKI Liczniki scalone serii 749x Cel ćwiczenia Zapoznanie się z budową i zasadą działania liczników synchronicznych i asynchronicznych. Poznanie liczników dodających
ARCHITEKTURA SYSTEMÓW KOMPUTEROWYCH
 ARCHITEKTURA SYSTEMÓW KOMPUTEROWYCH reprezentacja danych ASK.RD.01 c Dr inż. Ignacy Pardyka UNIWERSYTET JANA KOCHANOWSKIEGO w Kielcach Rok akad. 2011/2012 c Dr inż. Ignacy Pardyka (Inf.UJK) ASK.RD.01 Rok
ARCHITEKTURA SYSTEMÓW KOMPUTEROWYCH reprezentacja danych ASK.RD.01 c Dr inż. Ignacy Pardyka UNIWERSYTET JANA KOCHANOWSKIEGO w Kielcach Rok akad. 2011/2012 c Dr inż. Ignacy Pardyka (Inf.UJK) ASK.RD.01 Rok
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
4. Karta modułu Slave
 sygnały na magistralę. Można wyróżnić trzy typy układów scalonych takie jak bramki o otwartym kolektorze wyjściowym, bramki trójstanowe i bramki o przeciwsobnym wzmacniaczu wyjściowym. Obciążalność prądową
sygnały na magistralę. Można wyróżnić trzy typy układów scalonych takie jak bramki o otwartym kolektorze wyjściowym, bramki trójstanowe i bramki o przeciwsobnym wzmacniaczu wyjściowym. Obciążalność prądową
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
THP-100-x parametry. Pobór prądu (przy zasilaniu 12V) Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia
 Pobierana moc (przy zasilaniu 12V) 0,036W. Pomiar ciśnienia") THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
Protokół Modbus RTU / Sieć RS-485
 Modbus Protokół komunikacyjny stworzony w 1979 roku przez firmę Modicon. Służył do komunikacji z programowalnymi kontrolerami tej firmy. * Opracowany z myślą do zastosowań w automatyce * Protokół jest
Modbus Protokół komunikacyjny stworzony w 1979 roku przez firmę Modicon. Służył do komunikacji z programowalnymi kontrolerami tej firmy. * Opracowany z myślą do zastosowań w automatyce * Protokół jest
Detekcja i korekcja błędów w transmisji cyfrowej
 Detekcja i korekcja błędów w transmisji cyfrowej Błędy w transmisji cyfrowej pojedyncze wielokrotne. całkowita niepewność względem miejsca zakłóconych bitów oraz czy w ogóle występują paczkowe (grupowe)
Detekcja i korekcja błędów w transmisji cyfrowej Błędy w transmisji cyfrowej pojedyncze wielokrotne. całkowita niepewność względem miejsca zakłóconych bitów oraz czy w ogóle występują paczkowe (grupowe)
Kod znak-moduł. Wartość liczby wynosi. Reprezentacja liczb w kodzie ZM w 8-bitowym formacie:
 Wykład 3 3-1 Reprezentacja liczb całkowitych ze znakiem Do przedstawienia liczb całkowitych ze znakiem stosowane są następujące kody: - ZM (znak-moduł) - U1 (uzupełnienie do 1) - U2 (uzupełnienie do 2)
Wykład 3 3-1 Reprezentacja liczb całkowitych ze znakiem Do przedstawienia liczb całkowitych ze znakiem stosowane są następujące kody: - ZM (znak-moduł) - U1 (uzupełnienie do 1) - U2 (uzupełnienie do 2)
Komunikacja z czujnikiem
 THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
THP100 THP-100-x parametry Zasilanie Pobór prądu (przy zasilaniu 12V) 6 24 V DC * zalecane 6-12 V 3mA Pobierana moc (przy zasilaniu 12V) 0,036W Zakres temperatur pracy Komunikacja Zakres pomiaru ciśnienia
Mini Modbus 1AO. Moduł rozszerzający 1 wyjście analogowe, 2 wyjście cyfrowe. Wyprodukowano dla
 Wersja 1.0 14.08.2014 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Wersja 1.0 14.08.2014 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
2 Arytmetyka. d r 2 r + d r 1 2 r 1...d d 0 2 0,
 2 Arytmetyka Niech b = d r d r 1 d 1 d 0 będzie zapisem liczby w systemie dwójkowym Zamiana zapisu liczby b na system dziesiętny odbywa się poprzez wykonanie dodawania d r 2 r + d r 1 2 r 1 d 1 2 1 + d
2 Arytmetyka Niech b = d r d r 1 d 1 d 0 będzie zapisem liczby w systemie dwójkowym Zamiana zapisu liczby b na system dziesiętny odbywa się poprzez wykonanie dodawania d r 2 r + d r 1 2 r 1 d 1 2 1 + d
Opis układów wykorzystanych w aplikacji
 Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
Operacje arytmetyczne
 PODSTAWY TEORII UKŁADÓW CYFROWYCH Operacje arytmetyczne Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ Dodawanie dwójkowe Opracował: Andrzej Nowak Ostatni wynik
PODSTAWY TEORII UKŁADÓW CYFROWYCH Operacje arytmetyczne Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ Dodawanie dwójkowe Opracował: Andrzej Nowak Ostatni wynik
Materiały dodatkowe Krótka charakterystyka protokołu MODBUS
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Krótka charakterystyka protokołu MODBUS Opracowali: mgr inż. Tomasz Karla Data: Luty, 2017 r. Dodatkowe informacje Materiały dodatkowe mają charakter
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Krótka charakterystyka protokołu MODBUS Opracowali: mgr inż. Tomasz Karla Data: Luty, 2017 r. Dodatkowe informacje Materiały dodatkowe mają charakter
Pracownia Komputerowa wyk ad IV
 Pracownia Komputerowa wykad IV dr Magdalena Posiadaa-Zezula Magdalena.Posiadala@fuw.edu.pl http://www.fuw.edu.pl/~mposiada Magdalena.Posiadala@fuw.edu.pl 1 Reprezentacje liczb i znaków Liczby: Reprezentacja
Pracownia Komputerowa wykad IV dr Magdalena Posiadaa-Zezula Magdalena.Posiadala@fuw.edu.pl http://www.fuw.edu.pl/~mposiada Magdalena.Posiadala@fuw.edu.pl 1 Reprezentacje liczb i znaków Liczby: Reprezentacja
1259 (10) = 1 * * * * 100 = 1 * * * *1
 = 1 * * * * 100 = 1 * * * *1") Zamiana liczba zapisanych w dowolnym systemie na system dziesiętny: W systemie pozycyjnym o podstawie 10 wartości kolejnych cyfr odpowiadają kolejnym potęgom liczby 10 licząc od strony prawej i numerując
Zamiana liczba zapisanych w dowolnym systemie na system dziesiętny: W systemie pozycyjnym o podstawie 10 wartości kolejnych cyfr odpowiadają kolejnym potęgom liczby 10 licząc od strony prawej i numerując
Tranzystor JFET i MOSFET zas. działania
 Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Aby w pełni przetestować układ o trzech wejściach IN_0, IN_1 i IN_2 chcemy wygenerować wszystkie możliwe kombinacje sygnałów wejściowych.
 Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał