Architektura systemów komputerowych
|
|
|
- Dawid Nowak
- 7 lat temu
- Przeglądów:
Transkrypt
1 Architektura systemów komputerowych Sławomir Mamica Wykład 6: Obsługa urządzeń zewnętrznych
2 W poprzednim odcinku Układy czasowo-licznikowe 8051: Licznik (impulsy z linii zewnętrznej) / Timer (cykle maszynowe) Liczy w górę aż do przepełnienia 4 tryby pracy Przerwania od timerów Transmisja szeregowa w 8051: Typy transmisji szeregowej (synchroniczna, asynchroniczna) Prędkość transmisji (body, bps) Tryby transmisji danych (simplex, (full)duplex, pół(half)-duplex) Sterownik transmisji szeregowej 8051 (kluczowe rejestry i linie, tryby pracy) Rozkazy 8051 (cz. 2) Zadania domowe: Problemy? Pytania?
3 (Suplement) Skoki warunkowe od bitu (względne): JC (JNC) adres8 skocz pod adres8 jeśli C (nie C) JB (JNB) adres, adres8 skocz pod adres8 jeśli bit (nie bit) o adresie adres JBC adres, adres8 jak JB + zeruj bit o adresie adres
4 Plan a) Porty komunikacja ze światem zewnętrznym b) Wyświetlacz siedmiosegmentowy c) Klawiatura przeglądana sekwencyjnie d) Klawiatura matrycowa e) Wyświetlacz LCD
5 Porty (równoległe)
6 Końcówki 8051 VCC - napięcie zasilania VSS (GND) - masa XTAL1, XTAL2 - podłączenie rezonatora kwarcowego RST - Reset EA (VPP) - dostęp do zewnętrznej pamięci programu (External Access Enable ) PSEN - sygnał sterujący odczytu pamięci programu ALE - sygnał sterujący zatrzaskiem adresu (Address Latch Enable) Porty: P0.. P3
7 Porty 8051 Większość mikrokontrolerów rodziny 8051 jest wyposażona w cztery porty po 8 linii. Do obsługi portów służą rejestry specjalne P0, P1, P2, P3. Wystawienie 0 lub 1 na linię portu odbywa się przez wpisanie zadanej wartości do właściwego bitu odpowiedniego rejestru. Odczyt danych z wymienionych rejestrów jest równoważny pobraniu danych z odpowiedniego portu. Na końcówkach portów znajdują się przerzutniki, pamiętające ostatnio zapisane dane. Odczyt danych z portu może przebiegać w dwojaki sposób: (1) odczyt stanu końcówki portu uzyskujemy informację o stanie zewnętrznych linii podłączonych do portu (odczyt sygnału zewnętrznego) (2) odczyt stanu zatrzaśniętego w przerzutniku ostatnio zapisane dane (odczyt sygnału wewnętrznego). Aby prawidłowo odczytać sygnał zewnętrzny należy uprzednio wpisać do portu (przerzutników) jedynki.
8 Rozkazy RMW Rozkazy typu Odczyt-Modyfikacja- Zapis (RMW, Read-Modify-Write). Bity rejestru odczytywane są przez bufory dołączone do wyjścia Q przerzutnika, ich wartość jest przekazywana do arytmometru, gdzie następuje wykonanie operacji, a następnie nowa wartość jest wprowadzana do przerzutnika. Rozkazy RMW: ANL, ORL, XRL, JBC, skocz jeśli bit =1 i zeruj bit CPL Px.y negacja bitu INC Px- zwiększ o 1 DEC Px - zmniejsz o 1 DJNZ Px,skok MOV Px.y, C CLR Px.y SETB Px.y
9 Rola portów w 8051 Ogólnie IO mikrokontrolera (dwukierunkowe) + funkcje specjale: P0 podczas dostępu do pamięci zewnętrznej pełni zamienną rolę (multipleksowanie) magistrali adresów (młodszy bajt adresu, A0-A7) oraz magistrali danych (D0-D7). P1 w niektórych rozbudowanych wersjach 8051 linie portu P1 pełnią dodatkowe funkcje. P2 podczas dostępu do pamięci zewnętrznej pełni rolę bardziej znaczącej części szyny adresowej (A8-A15). P3 w podstawowym trybie pracy jako wejście/wyjście działanie portu P3 nie różni się w niczym od działania portów P1 i P2, ale wszystkie linie P3 pełnią dodatkowe funkcje: P3.0: RxD, P3.1: TxD, P3.2: INT0, P3.3: INT1, P3.4: T0, P3.5: T1, P3.6: WR (sygnał sterujący zapisem do pamięci danych), P3.7: RD (sygnał sterujący odczytem z pamięci danych)
10 Port 1 budowa końcówki Tranzystor sterowany wyjściem (zanegowanym) zatrzasku (przerzutnik typu D)
11 Port 1 - działanie Do przerzutnika wpisujemy jedynkę:!q = 0 więc kanał tranzystora będzie zablokowany (nie będzie zwarcia do masy) końcówka portu poprzez rezystor pociągający uzyska wysoki potencjał Do przerzutnika wpisujemy zero:!q = 1 więc kanał tranzystora drożny zwarcie końcówki portu do masy. Aby prawidłowo odczytać stan końcówek portu należy uprzednio wpisać do portu (przerzutników) jedynki. (Bo inaczej końcówka jest zwarta do masy.) (Dlatego po restarcie mamy 1 w portach.)
12 Port 3 Podobnie jak P1 + funkcja dodatkowa (alternatywna)
13 Port 2 Podobnie jak P1, ale przełączanie na adres
14 Port 0
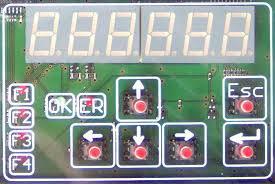
15 Linie szczególne w DSM-51 P1.0 COM2 wyjście P1.1 sterownik przerwań P1.2 wyjście izolowane O1 P1.3 wyjście izolowane O2 P1.4 wachdog P1.5 brzęczyk P1.6 wyświetlacz 7-segmentowy P1.7 dioda TEST P3.0 COM1 wejście P3.1 COM1 wyjście P3.2 COM2 wejście / sterownik przerwań P3.3 sterownik przerwań P3.4 wejście izolowane I1 P3.5 klawiatura przeglądana sekwencyjnie
16 Wyświetlacz siedmiosegmentowy
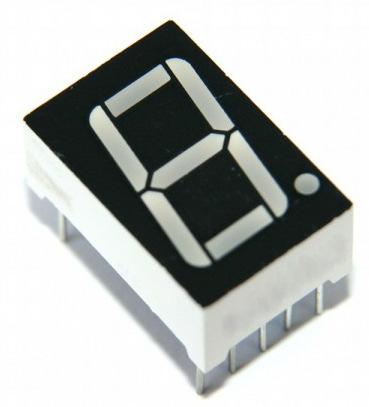
17 Wyświetlacz 7segmentowy Wskaźnik Segment

18 Wyświetlacz 7seg. w DSM-51
19 Sterowanie sekwencyjne Sterowanie wszystkimi segmentami wyświetlacza niezależnie wymaga 48 linii danych (6 wskaźników po 8 segmentów). Wyjście: sterowanie dynamiczne (sekwencyjne): Dwie grupy linii sterujących: wybór aktywnych wyświetlaczy oraz wybór aktywnych segmentów.
20 Sterowanie sekwencyjne Oczywiście, układ wybranych segmentów jest taki sam dla wszystkich wskaźników. Czyli każdy wskaźnik wyświetlacza wyświetla to samo? Trochę bez sensu. Co zrobićżeby wyświetlać na każdym wskaźniku co innego? Wyświetlać sekwencyjnie, czyli w danej chwili świeci tylko jeden wskaźnik, ale jest on zmieniany (w następnej chwili świeci następny). Jeśli proces ten powtarza się cyklicznie z odpowiednio dużą częstotliwością, to bezwładność ludzkiego oka załatwi resztę.
21 Konkrety, albo algorytm Na stosunkowo krótkie przedziały czasu (około 1ms) włączane są pojedynczo kolejne wskaźniki. Przełączeniu aktywnego wyświetlacza towarzyszy wybór odpowiedniego układ segmentów. Czyli każdy wskaźnik może wyświetlać co innego! Przy odpowiednio szybkim cyklicznym wyświetlaniu obserwator ma wrażenie jednoczesnego świecenia wszystkich wyświetlaczy. Rozwiązanie to ma dodatkową zaletę ogranicza pobór prądu przez blok wskaźników. (W przeciwieństwie do wyświetlacza statycznego w danej chwili czasu, włączony jest tylko jeden wyświetlacz.)
 P1.6 wł. / wył. wyświetlacz (0 włącza, 1 wyłącza) CSDS CSDB")
22 Kluczowe rejestry CSDS (adres 00111xxx) bufor wyboru wskaźnika CSDB (adres 00110xxx) bufor wyboru segmentu (bufor danych) P1.6 wł. / wył. wyświetlacz (0 włącza, 1 wyłącza) CSDS CSDB
23 Przykład 1 Problem 1: Cykliczna zmiana wskaźnika Jak to zorganizować? Oczywiście, obrót. Problem 2: Cykliczna zmiana układu segmentów Jak to zorganizować? Adresowanie pośrednie + inkrementacja adresu W kolejnych komórkach pamięci sekwencje segmentów (tablica jednowymiarowa) Czyli pętla (ale z restartem)
24 START: LJMP ORG START 100H Przykład 1 (c.d.) MOV 0FH, # B MOV 0EH, # B MOV 0DH, # B ; itd. RESTART: OBROT: MOV ; itd. ; tu wyświetlanie CLR P1.6 RRC JNC SJMP A, # B A OBROT RESTART Ustawienia wstępne wszystko to, co się nie będzie zmieniać W szczególności to, co ma być wyświetlane w kolejnych bajtach dla kolejnych wskaźników Pętla bezwarunkowa ustawienia dla pętli warunkowej Nie zapomnij włączyć wyświetlacza Zmiana wybranego wskaźnika Skocz jeśli C, czyli pętla nie potrzebuje dodatkowego licznika
25 Przykład 1 (c.d.) Problem 3: Bufory wyświetlacza są w pamięci zewnętrznej Czyli rozkaz MOVX Więc tylko dwie możliwości: A lub A Tak więc wysłanie danych do wyświetlacza psuje ACC (jego zawartość trzeba gdzieś zapamiętać) Pomocne są tutaj stałe: NAZWA EQU WARTOŚĆ (nazwa stałej musi rozpoczynać linię, podobnie ja etykieta)
26 Przykład 1 (c.d.) ; wybór wskaźnika WSKAZNIK EQU 30H ; MOV WSKAZNIK, #32 ; MOV MOV MOVX RRC MOV R0, #CSDS A, A A WSKAZNIK, A Deklaracja stałej (to będzie adres) Wybrany wskaźnik pod adres WSKAZNIK Adres odpowiedniego bufora do R0 Zawartość bajtu o adresie WSKAZNIK do ACC Zawartość ACC pod adres w R0 Obrócony ACC z powrotem pod adres WSKAZNIK
27 Przykład 1 (c.d.) TRESC EQU ; treść do wyświetlania ; MOV MOV MOV ; MOV MOV MOV MOVX 31H TRESC, # B TRESC+1, # B TRESC+2, # B R0, #CSDB R1, A Deklaracja stałej (to będzie adres początkowy) W kolejnych bajtach to, co ma być wyświetlane na kolejnych wskaźnikach Adres odpowiedniego bufora do R0 Adres danych do wyświetlenia do R1 (to można inkrementować w pętli) Dane spod adresu TRESC do ACC Zawartość ACC pod adres w R0
28 Przykład 1 (c.d.) prog06a.asm WSKAZNIK EQU 30H TRESC EQU 31H LJMP START START: ORG MOV MOV MOV ; itd. 100H Deklaracje stałych TRESC + 0, # B TRESC + 1, # B TRESC + 2, # B Ustawienia programu (to się nie zmienia w czasie pracy programu) RESTART: MOV R1, # TRESC + 5 MOV WSKAZNIK, # B CLR C OBROT: ; tu wyświetlanie Wartości początkowe dla pętli ( # B ) zaczynamy od TRESC+2
29 Przykład 1 (c.d.) prog06a.asm (c.d.) OBROT: SETB P1.6 MOV R0, #CSDB MOV A MOV R0, #CSDS MOV A, WSKAZNIK A CLR P1.6 RRC A MOV WSKAZNIK, A DEC R1 JNC OBROT SJMP RESTART Wyłącz wyświetlacz na czas zmian Załaduj bufor danych Załaduj bufor wyboru wskaźnika Nie zapomnij włączyć wyświetlacza Aktualizacja liczników Kolejny wskaźnik, albo restart pętli Emulator
30 Wyświetlanie zmiennych Problem 4: Jak (efektywnie) zmieniać to, co jest wyświetlane na danym wskaźniku? (jak na razie to na wskaźniku np. 1 cały czas mamy to samo) Rozwiązanie: Zastosować matrycę znaków (stronę kodową).
31 Klawiatura przeglądana sekwencyjnie
32 Klawiatura przeglądana sekwencyjnie
33 Idea Tylko jedna linia (P3.5) nie rozróżnia klawiszy (naciśnięcie dowolnego klawisza generuje taki sam sygnał) ale Reaguje tylko na te klawisze, które są wybrane w CSDS Cykliczne przeglądanie kolejnych klawiszy (podobnie jak cykliczne wyświetlanie na kolejnych wskaźnikach wyświetlacza siedmiosegmentowego) Oczywiście, można to zrobić przy okazji wyświetlania na wyświetlaczu siedmiosegmentowym
34 Przykład 1 (upgreat) prog06a.asm ( software version 7.0 ) OBROT: DALEJ: DEC JB R1 P3.5, KLAWIATURA JC OBROT SJMP RESTART KLAWIATURA: ; tu odczytać CSDS ; i zorganizować reakcję na klawisze SJMP DALEJ Jedynka (odczyt sygnału zewnętrznego!) na P3.5 znaczy naciśnięty wtedy skacz Odczyt klawiatury po zmianie liczników pętli nie musimy się nimi przejmować Informacja o tym, który klawisz naciśnięty w CSDS Powrót do pętli zmieniającej CSDS (i CSDB)
35 Sprężystość styków klawiatury Problem 5: Drgania styków klawiatury Styki klawiatury mają pewną sprężystość i po naciśnięciu klawisz odskakuje Tak więc przy jednokrotnym naciśnięciu będzie on zliczony kilka razy Rozwiązanie: Jeśli klawisz naciśnięty, to powtórz odczyt po pewnym czasie
36 Klawiatura matrycowa
 tylko jednej kolumny i odczycie stanu wszystkich wierszy.")
37 Idea Klawiaturę matrycową stanowi grupa przycisków zorganizowanych w wiersze i kolumny (czyli matrycę) Połączenie większej ilości klawiszy w matrycę pozwala na zaoszczędzenie wyprowadzeń mikrokontrolera Obsługa polega na uaktywnieniu (ustawieniu odpowiedniego poziomu) tylko jednej kolumny i odczycie stanu wszystkich wierszy. Stan danego wiersza wskazuje na wciśnięcie bądź zwolnienie określonego klawisza w aktywnej kolumnie.
38 Klawiatura matrycowa DSM klawiszy połączonych w dwie ośmiowierszowe kolumny. Klawiaturze przypisano dwa adresy oznaczone CSKB0 i CSKB1. Mają one przeciwne stany dwóch najmłodszych bitów: , dzięki czemu dwie linie adresowe wybierają kolumnę klawiatury.

39 Przypisanie klawiszy
40 Przykład
41 Wyświetlacz LCD

42 Zestaw matryc W systemie DSM-51 zastosowano alfanumeryczny wyświetlacz ciekłokrystaliczny posiadający dwie szesnastoznakowe linie. W wyświetlaczu zintegrowany jest sterownik HD4480. Pozwala on sterować wyświetlaczami zawierającymi do 40 znaków w każdej linii. (Czyli 24 znaki z każdej linii sterownika są niewidoczne.) Każdy znak alfanumeryczny wyświetlany jest na matrycy liczącej 35 punktów (8 rzędów, 5 kolumn).

.")
43 Generator znaków Pamięć generatora znaków składa się pamięci ROM, w której zapisano wzorce 192 znaków alfanumerycznych oraz pamięci typu RAM pozwalającej przechowywać wzorce 8 znaków zdefiniowanych programowo. Na każdy znak przeznaczono osiem bajtów pamięci generatora (8 rzędów w matrycy znaku). Istotny jest stan pięciu najmłodszych bitów (pięć kolumn matrycy).
44 Obsługa w DSM-51 Odczytać stan LCDRC.7 jeśli 1 to sterownik LCD jest zajęty Jeśli wolny to wpisz nowe dane do LCDWD lub instrukcję do LCDWC

45 Podprogramy w DSM-51 Zestaw podprogramów zapisanych w pamięci EPROM systemu DSM-51 Użycie: LCALL NAZWA_PODPROGRAMU
46 Podprogramy w DSM-51 (c.d.)
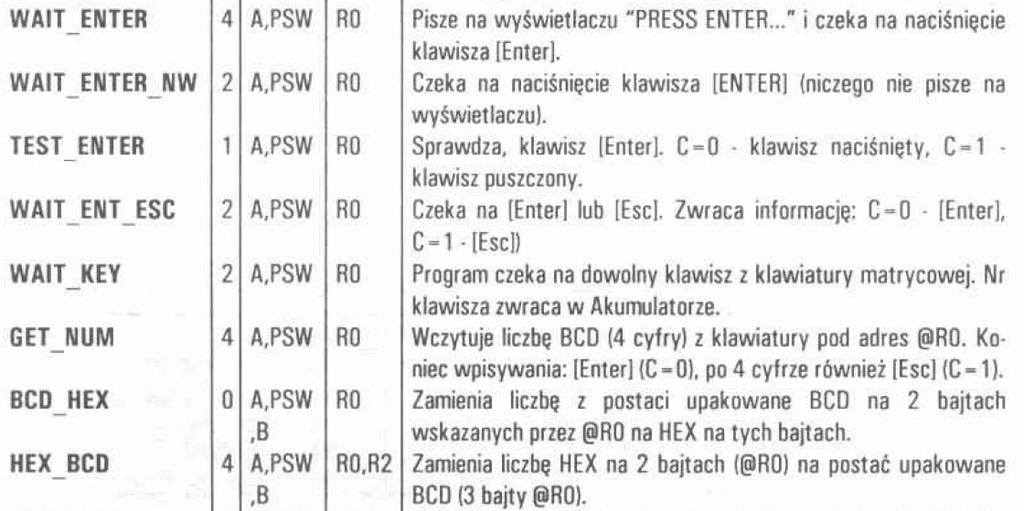
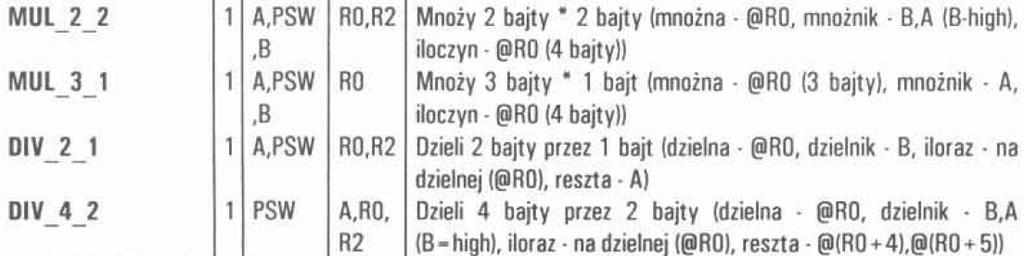
47 Uwagi do Emulatora W emulatorze nie zorganizowano zewnętrznej pamięci danych (z wyjątkiem nielicznych rejestrów związanych z niektórymi urządzeniami zewnętrznymi). Nie posiada on również zewnętrznej pamięci programu typu EPROM. W związku z tym w przypadku wywołania gotowych procedur dostępnych w EPROMie systemu DSM-51 pojawia się jedynie komunikat informujący o tym, jaka procedura została wywołana. W przypadku procedur: WRITE_DATA, WRITE_HEX, WRITE_INSTR, LCD_INIT, LCD_OFF, LCD_CLR, WAIT_ENTER, WAIT_ENTER_NW, TEST_ENTER, BCD_HEX, HEX_BCD, MUL_2_2, MUL_3_1, DIV_2_1 oraz DIV_4_2 dodatkowo w komunikacie zawarta jest informacja o wyniku działania procedury. Wywołanie procedury DELAY_US, DELAY_MS lub DELAY_100MS nie powoduje wyświetlania komunikatu, lecz zatrzymanie pracy emulatora na określoną liczbę milisekund.
48 Uwagi do Emulatora (c.d.) Procedury WAIT_ENTER i WAIT_ENTER_NW w reakcji na klawisz Enter, oprócz wyświetlania komunikatu, zerują najstarszy bit rejestru CSKB1 odzwierciedlającego stan klawiatury matrycowej. Procedura TEST_ENTER ustawia lub zeruje flagę C w zależności od stanu najstarszego bitu rejestru CSKB1. Procedury BCD_HEX oraz HEX_BCD zamieniają liczbę znajdującą się pod adresem wskazanym w R0 odpowiednio z zapisu BCD na szesnastkowy i odwrotnie. Procedury MUL_2_2, MUL_3_1, DIV_2_1 oraz DIV_4_2 wykonują działania mnożenia i dzielenia na danych znajdujących się pod adresem wskazanym w R0 i odpowiednich dla danej procedury rejestrach specjalnych.
49 Pytania?
50 W następnym odcinku Magistrala (szyna) systemowa Wewnętrzny przepływ sygnałów 8051 Magistrala 8051 Magistrala DSM-51 Proszę pamiętać o zadaniach domowych!
51 I to by było na tyle Dziękuję za uwagę!
Celem ćwiczenia jest zapoznanie z obsługą klawiatury sekwencyjnej i matrycowej w systemie DSM-51.
 Ćwiczenie nr 4 Cel ćwiczenia: Celem ćwiczenia jest zapoznanie z obsługą klawiatury sekwencyjnej i matrycowej w systemie DSM-51. Wiadomości wstępne: Klawiatura sekwencyjna zawiera tylko sześć klawiszy.
Ćwiczenie nr 4 Cel ćwiczenia: Celem ćwiczenia jest zapoznanie z obsługą klawiatury sekwencyjnej i matrycowej w systemie DSM-51. Wiadomości wstępne: Klawiatura sekwencyjna zawiera tylko sześć klawiszy.
Lista rozkazów mikrokontrolera 8051
 Lista rozkazów mikrokontrolera 8051 Spis treści: Architektura mikrokontrolera Rozkazy Architektura mikrokontrolera Mikrokontroler 8051 posiada trzy typy pamięci: układ zawiera pamięć wewnętrzną (On-Chip
Lista rozkazów mikrokontrolera 8051 Spis treści: Architektura mikrokontrolera Rozkazy Architektura mikrokontrolera Mikrokontroler 8051 posiada trzy typy pamięci: układ zawiera pamięć wewnętrzną (On-Chip
Zerowanie mikroprocesora
 Zerowanie mikroprocesora Zerowanie (RESET) procesora jest potrzebne dla ustalenia początkowych warunków pracy po włączeniu zasilania: adres początku programu stan systemu przerwań zawartość niektórych
Zerowanie mikroprocesora Zerowanie (RESET) procesora jest potrzebne dla ustalenia początkowych warunków pracy po włączeniu zasilania: adres początku programu stan systemu przerwań zawartość niektórych
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Systemy wbudowane. Wprowadzenie. Wprowadzenie. Mikrokontroler 8051 Budowa
 Systemy wbudowane Mikrokontroler 8051 Budowa dr inż. Maciej Piechowiak Wprowadzenie rdzeń CPU z jednostką artymetyczno-logiczną (ALU) do obliczeń na liczbach 8-bitowych, uniwersalne dwukierunkowe porty
Systemy wbudowane Mikrokontroler 8051 Budowa dr inż. Maciej Piechowiak Wprowadzenie rdzeń CPU z jednostką artymetyczno-logiczną (ALU) do obliczeń na liczbach 8-bitowych, uniwersalne dwukierunkowe porty
Programowanie mikrokontrolerów (CISC)
") Repertuar instrukcji Operacje arytmetyczne Operacje logiczne Operacje logiczne na bitach Przesyłanie danych Operacje sterujące (skoki) NOTACJA: Rr rejestry R0... R7 direct - wewnętrzny RAM oraz SFR @Ri
Repertuar instrukcji Operacje arytmetyczne Operacje logiczne Operacje logiczne na bitach Przesyłanie danych Operacje sterujące (skoki) NOTACJA: Rr rejestry R0... R7 direct - wewnętrzny RAM oraz SFR @Ri
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Ćwiczenie 2. Siedmiosegmentowy wyświetlacz LED
 Ćwiczenie 2 Siedmiosegmentowy wyświetlacz LED 2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się studentów ze sposobem obsługi wielopozycyjnego 7-segmentowego wyświetlacza LED multipleksowanego programowo
Ćwiczenie 2 Siedmiosegmentowy wyświetlacz LED 2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się studentów ze sposobem obsługi wielopozycyjnego 7-segmentowego wyświetlacza LED multipleksowanego programowo
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
CYKL ROZKAZOWY = 1 lub 2(4) cykle maszynowe
 cykle maszynowe") MIKROKONTROLER RODZINY MCS 5 Cykl rozkazowy mikrokontrolera rodziny MCS 5 Mikroprocesory rodziny MCS 5 zawierają wewnętrzny generator sygnałów zegarowych ustalający czas trwania cyklu zegarowego Częstotliwość
MIKROKONTROLER RODZINY MCS 5 Cykl rozkazowy mikrokontrolera rodziny MCS 5 Mikroprocesory rodziny MCS 5 zawierają wewnętrzny generator sygnałów zegarowych ustalający czas trwania cyklu zegarowego Częstotliwość
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury
 Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Programowanie mikrokontrolera 8051
 Programowanie mikrokontrolera 8051 Podane poniżej informacje mogą pomóc w nauce programowania mikrokontrolerów z rodziny 8051. Opisane są tu pewne specyficzne cechy tych procesorów a także podane przykłady
Programowanie mikrokontrolera 8051 Podane poniżej informacje mogą pomóc w nauce programowania mikrokontrolerów z rodziny 8051. Opisane są tu pewne specyficzne cechy tych procesorów a także podane przykłady
Pracownia elektryczno-elektroniczna klasa IV
 Ćwiczenie nr 5 Cel ćwiczenia: Ćwiczenie ma na celu zaznajomienie z metodami odliczania czasu z wykorzystaniem układów czasowo - licznikowych oraz poznanie zasad zgłaszania przerwań i sposobów ich wykorzystywania
Ćwiczenie nr 5 Cel ćwiczenia: Ćwiczenie ma na celu zaznajomienie z metodami odliczania czasu z wykorzystaniem układów czasowo - licznikowych oraz poznanie zasad zgłaszania przerwań i sposobów ich wykorzystywania
Pracownia elektryczno-elektroniczna klasa IV
 Ćwiczenie nr 1 Cel ćwiczenia: Celem ćwiczenia jest zapoznanie się z elementami systemu DSM-51, poprawną jego pracą, oprogramowaniem na PC, możliwymi trybami pracy oraz ze sterowaniem urządzeniami sprzężonymi
Ćwiczenie nr 1 Cel ćwiczenia: Celem ćwiczenia jest zapoznanie się z elementami systemu DSM-51, poprawną jego pracą, oprogramowaniem na PC, możliwymi trybami pracy oraz ze sterowaniem urządzeniami sprzężonymi
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
START: ; start programu od adresu 0100H ; zerowanie komórek od 01H do 07FH ( 1 dec dec)
") Ćwiczenie 01 - Strona nr 1 ĆWICZENIE 01 PRACA KROKOWA MIKROKONTROLERA Cel ćwiczenia: Zapoznanie się ze środowiskiem programowym: poznanie funkcji asemblera, poznanie funkcji symulatora. Operacje na plikach,
Ćwiczenie 01 - Strona nr 1 ĆWICZENIE 01 PRACA KROKOWA MIKROKONTROLERA Cel ćwiczenia: Zapoznanie się ze środowiskiem programowym: poznanie funkcji asemblera, poznanie funkcji symulatora. Operacje na plikach,
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
Wyświetlacze graficzne : 162x64 z kontrolerem S1D x60 z kontrolerem S1D15710
 S1D15705 Wyświetlacze graficzne : 162x64 z kontrolerem S1D15705 219x60 z kontrolerem S1D15710 S1D15710 Wyświetlacze S1D15705/S1D15710 są graficznymi wyświetlaczami ciekłokrystalicznymi. Wyposażone są w
S1D15705 Wyświetlacze graficzne : 162x64 z kontrolerem S1D15705 219x60 z kontrolerem S1D15710 S1D15710 Wyświetlacze S1D15705/S1D15710 są graficznymi wyświetlaczami ciekłokrystalicznymi. Wyposażone są w
Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe
 Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe Ryszard J. Barczyński, 2009 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Lista instrukcji procesora 8051 część 2 Skoki i wywołania podprogramów, operacje na stosie, operacje bitowe Ryszard J. Barczyński, 2009 2013 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
1.2 Schemat blokowy oraz opis sygnałów wejściowych i wyjściowych
 Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Dodatek A Wyświetlacz LCD. Przeznaczenie i ogólna charakterystyka Wyświetlacz ciekłokrystaliczny HY-62F4 zastosowany w ćwiczeniu jest wyświetlaczem matrycowym zawierającym moduł kontrolera i układ wykonawczy
Elementy struktur cyfrowych. Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych.
 Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów służy do przechowywania danych. Wybór źródła
Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów służy do przechowywania danych. Wybór źródła
Elementy struktur cyfrowych. Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych.
 Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów do przechowywania danych. Wybór źródła danych
Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów do przechowywania danych. Wybór źródła danych
Elementy struktur cyfrowych. Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych.
 Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. PTC 2015/2016 Magistrale W układzie cyfrowym występuje bank rejestrów do przechowywania
Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. PTC 2015/2016 Magistrale W układzie cyfrowym występuje bank rejestrów do przechowywania
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Przerwania laboratorium: 04 autor: mgr inż. Michał Lankosz dr hab. Zbisław Tabor,
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Przerwania laboratorium: 04 autor: mgr inż. Michał Lankosz dr hab. Zbisław Tabor,
Mikrokontroler 80C51
 DSM-51 * STRONA 1 * Temat : Wiadomości podstawowe Układy cyfrowe to rodzaj układów elektronicznych, w których sygnały napięciowe przyjmują tylko określoną liczbę poziomów, którym przypisywane są wartości
DSM-51 * STRONA 1 * Temat : Wiadomości podstawowe Układy cyfrowe to rodzaj układów elektronicznych, w których sygnały napięciowe przyjmują tylko określoną liczbę poziomów, którym przypisywane są wartości
architektura komputerów w 1 1
 8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
MIKROPROCESORY architektura i programowanie
 Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Programowanie w językach asemblera i C
 Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Organizacja typowego mikroprocesora
 Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Pracownia elektryczno-elektroniczna klasa IV
 Ćwiczenie nr 2 Cel ćwiczenia: zapoznanie się z nowymi metodami adresowania portów, urządzeń do nich podpiętych (adresowanie pośrednie, bezpośrednie, rejestrowe) oraz poznanie struktury wewnętrznej pamięci
Ćwiczenie nr 2 Cel ćwiczenia: zapoznanie się z nowymi metodami adresowania portów, urządzeń do nich podpiętych (adresowanie pośrednie, bezpośrednie, rejestrowe) oraz poznanie struktury wewnętrznej pamięci
Opis procedur asemblera AVR
 Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Struktura programu w asemblerze mikrokontrolera 8051
 Struktura programu w asemblerze mikrokontrolera 8051 Program w asemblerze, dający ten sam kod wynikowy, może być napisany na wiele sposobów. Źle napisany program po pewnym czasie (a być może już w czasie
Struktura programu w asemblerze mikrokontrolera 8051 Program w asemblerze, dający ten sam kod wynikowy, może być napisany na wiele sposobów. Źle napisany program po pewnym czasie (a być może już w czasie
Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne
 Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Ćwiczenie 7 Matryca RGB
 IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
Asembler - język maszynowy procesora
 UWAGA! Treść niniejszego dokumentu powstała na podstawie cyklu artykułów pt. Mikrokontrolery? To takie proste zamieszczonych w czasopiśmie Elektronika dla Wszystkich. Asembler - język maszynowy procesora
UWAGA! Treść niniejszego dokumentu powstała na podstawie cyklu artykułów pt. Mikrokontrolery? To takie proste zamieszczonych w czasopiśmie Elektronika dla Wszystkich. Asembler - język maszynowy procesora
Obszar rejestrów specjalnych. Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW
 Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW MIKROKONTROLER 85 - wiadomości podstawowe. Schemat blokowy mikrokontrolera 85 Obszar rejestrów specjalnych
Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW MIKROKONTROLER 85 - wiadomości podstawowe. Schemat blokowy mikrokontrolera 85 Obszar rejestrów specjalnych
Opis układów wykorzystanych w aplikacji
 Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2
 Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
Technika mikroprocesorowa I Studia niestacjonarne rok II Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci,
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
SORTER DO BILONU. Glover HCS-31 INSTRUKCJA OBSŁUGI
 SORTER DO BILONU Glover HCS-31 INSTRUKCJA OBSŁUGI 1. Wstęp Urządzenie Glover HCS-31 moŝe sortować jednocześnie sześć rodzajów monet oraz realizuje zliczanie, przechowywanie i drukowanie wyników zliczania,
SORTER DO BILONU Glover HCS-31 INSTRUKCJA OBSŁUGI 1. Wstęp Urządzenie Glover HCS-31 moŝe sortować jednocześnie sześć rodzajów monet oraz realizuje zliczanie, przechowywanie i drukowanie wyników zliczania,
Cyfrowe Elementy Automatyki. Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem
 Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Organizacja pamięci VRAM monitora znakowego. 1. Tryb pracy automatycznej
 Struktura stanowiska laboratoryjnego Na rysunku 1.1 pokazano strukturę stanowiska laboratoryjnego Z80 z interfejsem częstościomierza- czasomierz PFL 21/22. Rys.1.1. Struktura stanowiska. Interfejs częstościomierza
Struktura stanowiska laboratoryjnego Na rysunku 1.1 pokazano strukturę stanowiska laboratoryjnego Z80 z interfejsem częstościomierza- czasomierz PFL 21/22. Rys.1.1. Struktura stanowiska. Interfejs częstościomierza
Systemy mikroprocesorowe. Literatura podręcznikowa. Przedmioty związane. Przykłady systemów wbudowanych. Pojęcie systemu wbudowanego embedded system
 Systemy mikroprocesorowe dr inŝ. Stefan Brock pok. 627, hala 22B/3 (PP) Stefan.Brock@put.poznan.pl Stefan.Brock@gmail.com rozliczenie dwa kolokwia w trakcie wykładu dr inŝ. Stefan Brock 2008/2009 1 Literatura
Systemy mikroprocesorowe dr inŝ. Stefan Brock pok. 627, hala 22B/3 (PP) Stefan.Brock@put.poznan.pl Stefan.Brock@gmail.com rozliczenie dwa kolokwia w trakcie wykładu dr inŝ. Stefan Brock 2008/2009 1 Literatura
Architektura systemów komputerowych
 Architektura systemów komputerowych Sławomir Mamica Wykład 7: Sygnały sterujące i magistrale http://main5.amu.edu.pl/~zfp/sm/home.html W poprzednim odcinku Porty komunikacja ze światem zewnętrznym Wyświetlacz
Architektura systemów komputerowych Sławomir Mamica Wykład 7: Sygnały sterujące i magistrale http://main5.amu.edu.pl/~zfp/sm/home.html W poprzednim odcinku Porty komunikacja ze światem zewnętrznym Wyświetlacz
ad a) Konfiguracja licznika T1 Niech nasz program składa się z dwóch fragmentów kodu: inicjacja licznika T1 pętla główna
 Konfiguracja licznika T1 Niech nasz program składa się z dwóch fragmentów kodu: inicjacja licznika T1 pętla główna") Technika Mikroprocesorowa Laboratorium 4 Obsługa liczników i przerwań Cel ćwiczenia: Celem ćwiczenia jest nabycie umiejętności obsługi układów czasowo-licznikowych oraz obsługi przerwań. Nabyte umiejętności
Technika Mikroprocesorowa Laboratorium 4 Obsługa liczników i przerwań Cel ćwiczenia: Celem ćwiczenia jest nabycie umiejętności obsługi układów czasowo-licznikowych oraz obsługi przerwań. Nabyte umiejętności
Moduł licznika położenia LP 2.
 Pracownia Elektroniki i Automatyki W.J. Dubiński ul. Krzyszkowicka 16 32-020 WIELICZKA tel./fax (12) 278 29 11 NIP 676-010-37-14 Moduł licznika położenia LP 2. 1. Przeznaczenie. Licznik rewersyjny LP 2
Pracownia Elektroniki i Automatyki W.J. Dubiński ul. Krzyszkowicka 16 32-020 WIELICZKA tel./fax (12) 278 29 11 NIP 676-010-37-14 Moduł licznika położenia LP 2. 1. Przeznaczenie. Licznik rewersyjny LP 2
Przerwania w architekturze mikrokontrolera X51
 Przerwania w architekturze mikrokontrolera X51 (przykład przerwanie zegarowe) Ryszard J. Barczyński, 2009 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku
Przerwania w architekturze mikrokontrolera X51 (przykład przerwanie zegarowe) Ryszard J. Barczyński, 2009 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku
SML3 październik 2008
 25 100_LED8 Moduł zawiera 8 diod LED dołączonych do wejść za pośrednictwem jednego z kilku możliwych typów układów (typowo jest to układ typu 563). Schemat Moduł jest wyposażony w dwa złącza typu port
25 100_LED8 Moduł zawiera 8 diod LED dołączonych do wejść za pośrednictwem jednego z kilku możliwych typów układów (typowo jest to układ typu 563). Schemat Moduł jest wyposażony w dwa złącza typu port
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portów wejścia/wyjścia mikrokontrolera laboratorium: 02 autor: mgr inż.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portów wejścia/wyjścia mikrokontrolera laboratorium: 02 autor: mgr inż.
Liczniki, rejestry lab. 09 Mikrokontrolery 8051 cz. 1
 Liczniki, rejestry lab. 09 Mikrokontrolery 8051 cz. 1 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
Liczniki, rejestry lab. 09 Mikrokontrolery 8051 cz. 1 PODSTAWY TECHNIKI CYFROWEJ I MIKROPROCESOROWEJ EIP KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA
Laboratorium 1: Wprowadzenie do środowiska programowego. oraz podstawowe operacje na rejestrach i komórkach pamięci
 Laboratorium 1: Wprowadzenie do środowiska programowego oraz podstawowe operacje na rejestrach i komórkach pamięci Zapoznanie się ze środowiskiem programowym: poznanie funkcji asemblera, poznanie funkcji
Laboratorium 1: Wprowadzenie do środowiska programowego oraz podstawowe operacje na rejestrach i komórkach pamięci Zapoznanie się ze środowiskiem programowym: poznanie funkcji asemblera, poznanie funkcji
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
Technika mikroprocesorowa I Wykład 2
 Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
Technika mikroprocesorowa I Wykład 2 Literatura: www.zilog.com Z80 Family, CPU User Manual Cykle magistrali w mikroprocesorze Z80 -odczyt kodu rozkazu, -odczyt-zapis pamięci, -odczyt-zapis urządzenia we-wy,
Przykładowe pytania DSP 1
 Przykładowe pytania SP Przykładowe pytania Systemy liczbowe. Przedstawić liczby; -, - w kodzie binarnym i hexadecymalnym uzupełnionym do dwóch (liczba 6 bitowa).. odać dwie liczby binarne w kodzie U +..
Przykładowe pytania SP Przykładowe pytania Systemy liczbowe. Przedstawić liczby; -, - w kodzie binarnym i hexadecymalnym uzupełnionym do dwóch (liczba 6 bitowa).. odać dwie liczby binarne w kodzie U +..
Technika mikroprocesorowa I Wykład 4
 Technika mikroprocesorowa I Wykład 4 Układ czasowo licznikowy 8253 INTEL [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf] Wyprowadzenia układu [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf]
Technika mikroprocesorowa I Wykład 4 Układ czasowo licznikowy 8253 INTEL [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf] Wyprowadzenia układu [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf]
Temat: Pamięci. Programowalne struktury logiczne.
 Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Ćwiczenie 30. Techniki mikroprocesorowe Programowanie w języku Asembler mikrokontrolerów rodziny '51
 Ćwiczenie 30 Techniki mikroprocesorowe Programowanie w języku Asembler mikrokontrolerów rodziny '51 Cel ćwiczenia Poznanie architektury oraz zasad programowania mikrokontrolerów rodziny 51, aby zapewnić
Ćwiczenie 30 Techniki mikroprocesorowe Programowanie w języku Asembler mikrokontrolerów rodziny '51 Cel ćwiczenia Poznanie architektury oraz zasad programowania mikrokontrolerów rodziny 51, aby zapewnić
Architektura komputerów
 Architektura komputerów Wykład 3 Jan Kazimirski 1 Podstawowe elementy komputera. Procesor (CPU) 2 Plan wykładu Podstawowe komponenty komputera Procesor CPU Cykl rozkazowy Typy instrukcji Stos Tryby adresowania
Architektura komputerów Wykład 3 Jan Kazimirski 1 Podstawowe elementy komputera. Procesor (CPU) 2 Plan wykładu Podstawowe komponenty komputera Procesor CPU Cykl rozkazowy Typy instrukcji Stos Tryby adresowania
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
Zwory na płycie z łączem szeregowym ustawienie zworek dla programowania.
 I. OPIS STANOWISKA DO BADANIA SILNIKÓW KROKOWYCH LINIOWYCH Pracą silnika można sterować za pomocą sterownika lub przez łącze szeregowe RS485/232 z komputera. Rysunek przedstawiający sposób podłączenia
I. OPIS STANOWISKA DO BADANIA SILNIKÓW KROKOWYCH LINIOWYCH Pracą silnika można sterować za pomocą sterownika lub przez łącze szeregowe RS485/232 z komputera. Rysunek przedstawiający sposób podłączenia
Politechnika Warszawska
 Politechnika Warszawska Wydział Elektryczny Laboratorium Podstaw Techniki Mikroprocesorowej Skrypt do ćwiczenia M.38 Zbieranie pomiarów w czasie rzeczywistym - asembler 1.Wstęp W ćwiczeniach od M.38 do
Politechnika Warszawska Wydział Elektryczny Laboratorium Podstaw Techniki Mikroprocesorowej Skrypt do ćwiczenia M.38 Zbieranie pomiarów w czasie rzeczywistym - asembler 1.Wstęp W ćwiczeniach od M.38 do
DSM-51 v2 Dydaktyczny System Mikroprocesorowy. DSM51ASS (Asembler 8051) wersja 1.01
 wersja 1.01") DSM-51 v2 Dydaktyczny System Mikroprocesorowy DSM51ASS (Asembler 8051) wersja 1.01 Producent: ------------------------------------------------------------ MicroMade Systemy Mikroprocesorowe Siedziba Firmy:
DSM-51 v2 Dydaktyczny System Mikroprocesorowy DSM51ASS (Asembler 8051) wersja 1.01 Producent: ------------------------------------------------------------ MicroMade Systemy Mikroprocesorowe Siedziba Firmy:
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Układ sterowania, magistrale i organizacja pamięci. Dariusz Chaberski
 Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
Układ sterowania, magistrale i organizacja pamięci Dariusz Chaberski Jednostka centralna szyna sygnałow sterowania sygnały sterujące układ sterowania sygnały stanu wewnętrzna szyna danych układ wykonawczy
petla:... ; etykieta określa adres w pamięci kodu (docelowe miejsce skoku) DJNZ R7, petla
 DJNZ R7, petla") Asembler A51 1. Symbole Nazwy symboliczne Symbol jest nazwą, która może być użyta do reprezentowania wartości stałej numerycznej, wyrażenia, ciągu znaków (tekstu), adresu lub nazwy rejestru. Nazwy symboliczne
Asembler A51 1. Symbole Nazwy symboliczne Symbol jest nazwą, która może być użyta do reprezentowania wartości stałej numerycznej, wyrażenia, ciągu znaków (tekstu), adresu lub nazwy rejestru. Nazwy symboliczne
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Liczniki i timery laboratorium: 03 autor: mgr inż. Michał Lankosz dr hab. Zbisław
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Liczniki i timery laboratorium: 03 autor: mgr inż. Michał Lankosz dr hab. Zbisław
Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4 firmy Atmel
 Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4
Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4
Architektura systemów komputerowych
 Architektura systemów komputerowych Sławomir Mamica Wykład 1: Technikalia http://main5.amu.edu.pl/~zfp/sm/home.html Plan a) O przedmiocie b) O systemie DSM-51 c) O mikrokontrolerze 8051 d) O asemblerze
Architektura systemów komputerowych Sławomir Mamica Wykład 1: Technikalia http://main5.amu.edu.pl/~zfp/sm/home.html Plan a) O przedmiocie b) O systemie DSM-51 c) O mikrokontrolerze 8051 d) O asemblerze
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
Ćw. 7: Układy sekwencyjne
 Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Język FBD w systemie Concept
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Architektura komputerów. Komputer Procesor Mikroprocesor koncepcja Johna von Neumanna
 Architektura komputerów. Literatura: 1. Piotr Metzger, Anatomia PC, wyd. IX, Helion 2004 2. Scott Mueller, Rozbudowa i naprawa PC, wyd. XVIII, Helion 2009 3. Tomasz Kowalski, Urządzenia techniki komputerowej,
Architektura komputerów. Literatura: 1. Piotr Metzger, Anatomia PC, wyd. IX, Helion 2004 2. Scott Mueller, Rozbudowa i naprawa PC, wyd. XVIII, Helion 2009 3. Tomasz Kowalski, Urządzenia techniki komputerowej,
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Ustawienia ogólne. Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony
 Ustawienia ogólne Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony Panel główny programu System Sensor (tylko dla wersja V2, V3, V4) Panel główny programu System
Ustawienia ogólne Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony Panel główny programu System Sensor (tylko dla wersja V2, V3, V4) Panel główny programu System
Dodatek B. Zasady komunikacji z otoczeniem w typowych systemach komputerowych
 Dodatek B. Zasady komunikacji z otoczeniem w typowych systemach komputerowych B.1. Dostęp do urządzeń komunikacyjnych Sterowniki urządzeń zewnętrznych widziane są przez procesor jako zestawy rejestrów
Dodatek B. Zasady komunikacji z otoczeniem w typowych systemach komputerowych B.1. Dostęp do urządzeń komunikacyjnych Sterowniki urządzeń zewnętrznych widziane są przez procesor jako zestawy rejestrów
TMiK Podstawy Techniki Mikroprocesorowej. Lidia Łukasiak
 TMiK Podstawy Techniki Mikroprocesorowej Materiały pomocnicze do wykładu Lidia Łukasiak 1 Treść przedmiotu Wprowadzenie System mikroprocesorowy Mikroprocesor - jednostka centralna Rodzaje pamięci Mikrokontrolery
TMiK Podstawy Techniki Mikroprocesorowej Materiały pomocnicze do wykładu Lidia Łukasiak 1 Treść przedmiotu Wprowadzenie System mikroprocesorowy Mikroprocesor - jednostka centralna Rodzaje pamięci Mikrokontrolery
Aby w pełni przetestować układ o trzech wejściach IN_0, IN_1 i IN_2 chcemy wygenerować wszystkie możliwe kombinacje sygnałów wejściowych.
 Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Techniki mikroprocesorowe i systemy wbudowane
 Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
Dodatek D. Układ współpracy z klawiaturą i wyświetlaczem 8279
 Dodatek D Układ współpracy z klawiaturą i wyświetlaczem 8279 Programowany układ współpracy z klawiatura i wyświetlaczem może być wykorzystywany do automatycznej obsługi matrycy klawiszy oraz zestawu wskaźników
Dodatek D Układ współpracy z klawiaturą i wyświetlaczem 8279 Programowany układ współpracy z klawiatura i wyświetlaczem może być wykorzystywany do automatycznej obsługi matrycy klawiszy oraz zestawu wskaźników
Ćwiczenie 9 Częstościomierz oparty na µc 8051(8052)
") Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 9 Częstościomierz oparty na µc 8051(8052) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z możliwościami zastosowania mikrokontrolerów
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 9 Częstościomierz oparty na µc 8051(8052) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z możliwościami zastosowania mikrokontrolerów
Technika mikroprocesorowa. W. Daca, Politechnika Szczecińska, Wydział Elektryczny, 2007/08
 Pamięci Układy pamięci kontaktują się z otoczeniem poprzez szynę danych, szynę owa i szynę sterującą. Szerokość szyny danych określa liczbę bitów zapamiętywanych do pamięci lub czytanych z pamięci w trakcie
Pamięci Układy pamięci kontaktują się z otoczeniem poprzez szynę danych, szynę owa i szynę sterującą. Szerokość szyny danych określa liczbę bitów zapamiętywanych do pamięci lub czytanych z pamięci w trakcie
Pamięci EEPROM w systemach mikroprocesorowych, część 2
 Pamięci EEPROM w systemach mikroprocesorowych, część 2 Tym artyku³em koòczymy prezentacjí sposobûw programowania szeregowych pamiíci EEPROM. Poniewaø najwiíksz¹ popularnoúci¹ ciesz¹ sií wúrûd uøytkownikûw
Pamięci EEPROM w systemach mikroprocesorowych, część 2 Tym artyku³em koòczymy prezentacjí sposobûw programowania szeregowych pamiíci EEPROM. Poniewaø najwiíksz¹ popularnoúci¹ ciesz¹ sií wúrûd uøytkownikûw
Ćwiczenie 3 Wyświetlacz ciekłokrystaliczny
 Ćwiczenie 3 Wyświetlacz ciekłokrystaliczny Warszawa, 2007-11-09 IMiO PW, LPTM, Ćwiczenie 3, Wyświetlacz ciekłokrystaliczny -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z obsługą programową wyświetlacza
Ćwiczenie 3 Wyświetlacz ciekłokrystaliczny Warszawa, 2007-11-09 IMiO PW, LPTM, Ćwiczenie 3, Wyświetlacz ciekłokrystaliczny -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z obsługą programową wyświetlacza
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
SML3 październik
 SML3 październik 2005 35 160_7SEG2 Moduł zawiera dwupozycyjny 7-segmentowy wyświetlacz LED ze wspólną anodą, sterowany przez dwa dekodery HEX->7SEG zrealizowane w układach GAL16V8. Dekodery przypominają
SML3 październik 2005 35 160_7SEG2 Moduł zawiera dwupozycyjny 7-segmentowy wyświetlacz LED ze wspólną anodą, sterowany przez dwa dekodery HEX->7SEG zrealizowane w układach GAL16V8. Dekodery przypominają
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera