PROJEKTOWANIE MECHATRONICZNE UKŁADY NAPĘDOWE OBRABIAREK
|
|
|
- Daniel Wawrzyniak
- 7 lat temu
- Przeglądów:
Transkrypt





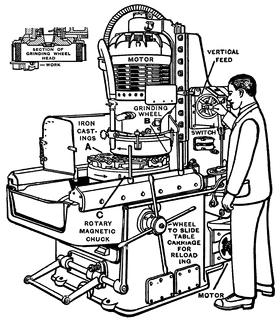
1 PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p Wśród układów napędowych obrabiarek można rozróżnić napędy główne oraz napędy posuwu. Wśród układów napędowych obrabiarek można rozróżnić napędy główne oraz napędy posuwu. 1



2 Wśród układów napędowych obrabiarek można rozróżnić napędy główne oraz napędy posuwu. Wśród układów napędowych obrabiarek można rozróżnić napędy główne oraz napędy posuwu. Wśród układów napędowych obrabiarek można rozróżnić napędy główne oraz napędy posuwu. Jako napędy główne najczęściej stosowane są układy napędowe prądu przemiennego w postaci elektrowrzecion lub zespołów wrzecionowych z oddzielnymi silnikami elektrycznymi. W skład napędów głównych wchodzą także sprzęgła, hamulce, przekładnie (pasowe, zębate). Jako elementy składowe napędów posuwu można wyróżnić: układy napędowe prądu stałego i przemiennego, silniki elektryczne serwonapędowe i krokowe (obrotowe, liniowe, zintegrowane z nakrętką), kompaktowe jednostki napędowe, przekładnie (pasowe, zębate), toczne przekładnie śrubowe. 2

3 KLASYFIKACJA NAPĘDÓW GŁÓWNYCH KLASYFIKACJA NAPĘDÓW POSUWOWYCH Informacje w INTERNECIE nie podlegają często weryfikacji! 3
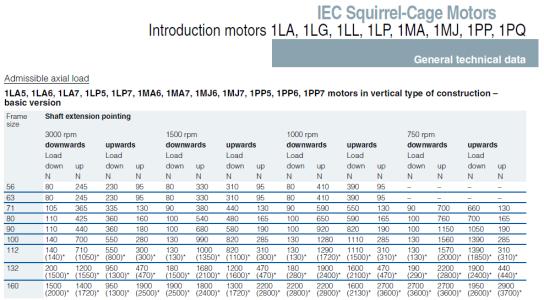
4 WYMAGANIA Wymagania stawiane napędom głównym obrabiarek: duża sztywność charakterystyki mechanicznej, duży zakres bezstopniowej zmiany prędkości obrotowej silnika, przebieg dopuszczalnego obciążenia w funkcji prędkości obrotowej, dostosowany do technologicznej charakterystyki obciążenia obrabiarki, szybki rozruch, zdolność do pracy serwonapędowej. Wymagania stawiane napędom ruchu posuwowego obrabiarek: duży zakres bezstopniowej zmiany prędkości obrotowej silnika, szybki rozruch i hamowanie, duża sztywność mechaniczna, duża równomierność ruchu, duża dokładność pozycjonowania. Sam proces doboru silnika mającego spełniać w obrabiarce określone funkcje napędowe poprzedzają obliczenia. Zależnie od tych funkcji danymi wyjściowymi do obliczeń mogą być: prędkość napędzanych zespołów lub elementów wykonawczych, określana już na etapie obliczeń kinematycznych, moc użyteczna potrzebna do realizacji procesu skrawania (moc skrawania), siły i momenty obrotowe, jakie mają rozwijać zespoły i elementy wykonawcze (np. główna składowa siły skrawania, moment skrawania, siła posuwowa, siła zacisku, siła podnoszenia, siła przesuwu itp.), charakterystyka dopuszczalnych obciążeń napędzanego zespołu (ograniczenia parametrów siłowych i energetycznych w zakresie występujących prędkości), charakter i warunki pracy silnika (praca ciągła, przerywana czy dorywcza, przeciążenia, temperatura otoczenia), parametry i wymagania dynamiczne napędzanych zespołów (masy, momenty bezwładności, przyspieszenia, stale czasowe). - WYTYCZNE Podstawowym parametrem jest dostępne źródło zasilania, które w przypadku rozwiązań mobilnych, gdzie nie można skorzystać z istniejącej sieci energetycznej. Może zostać zrealizowane za pomocą np. agregatów prądotwórczych jedno i trójfazowych. W szczególnych przypadkach może to być bateria akumulatorów. Zastosowane układy napędowe powinny mieć stopień ochrony IP dopasowany do planowanych warunków środowiskowych. Określenie docelowych parametrów ruchu elementów korpusowych (prędkości, przyspieszenia oraz dokładności pozycjonowania) pozwala na określenie rodzaju zastosowanych silników. Jeśli od projektowanego układu nie wymaga się dużej precyzji i dynamiki ruchu to istnieje możliwość zastosowania silników asynchronicznych co pozwala znacznie zredukować koszty. Jednak w większości przypadków obrabiarek warunek ten nie jest spełniony i powszechnie stosowane są np. bezszczotkowe silniki prądu stałego BLDC (ang. Brushless Direct Current Motor). 4
5 STOPIEŃ OCHRONY IP Polska Norma PN-IEC :1999. Instalacje elektryczne w obiektach budowlanych -- Wymagania dotyczące specjalnych instalacji lub lokalizacji -- Wymagania dotyczące uziemień instalacji urządzeń przetwarzania danych Norma ta reguluje zasady instalowania urządzeń elektrycznych STOPIEŃ OCHRONY IP Według normy PN-EN 60529:2003: Kod IP (ang. IP Codes) system oznaczania stopni ochrony zapewnianej przez obudowy przed dostępem do części niebezpiecznych, wnikaniem obcych ciał stałych, wnikaniem wody oraz system podawania dodatkowych informacji związanych z taką ochroną. - WYTYCZNE Bardzo ważną role odgrywa właściwe poprowadzenie przewodów zasilających silnik. Nie powinny one biec równolegle do przewodów aparatury kontrolno-sterującej ze względu na możliwość wystąpienia zakłóceń w przewodach sygnałowych, ich rozmieszczenie na obrabiarce przenośnej stanowi odrębne zagadnienie projektowe. W zależności od rozwiązania konstrukcyjnego należy określić sposób realizacji sprzężenia zwrotnego. W przypadku, gdy ze względów technologicznych nie ma możliwości wykonania zerowania układu i zjazdu na punkty referencyjne, konieczne jest zastosowanie enkoderów absolutnych co istotnie zwiększa koszt układu. W chwili obecnej dla nowych konstrukcji praktycznie nie stosuje się innych metod pomiarowych jak np. resolwery czy prądnice tachometryczne. 5
6 - WYTYCZNE Dobór układu sterującego powinien uwzględniać parametry obiektu i być poprzedzony analizą dynamiki konstrukcji mechanicznej ze szczególnym uwzględnieniem występujących rezonansów i ewentualną możliwością wzbudzenia maszyny do drgań w tym zakresie poprzez układ sterowania. Jeśli to konieczne stosowane w układzie sterowania są filtry np. grzebieniowe, które umożliwiają eliminację wybranych częstotliwości składowych w sygnale sterującym. Istnieje możliwość wystąpienia zniekształcenia zarysu i trajektorii wywołanych niewłaściwym doborem współczynników wzmocnienia układu regulacji. Jeśli w układzie występują mierzalne czynniki (np. masa elementu) mające bezpośredni wpływ na pracę układu napędowego, wykorzystuje się struktury regulacji typu sprzężenie w przód (ang. feedforward) umożliwiające kompensację mierzalnych zakłóceń. - WYTYCZNE Układy sterujące w poszczególnych osiach muszą współpracować ze sobą synchronicznie, co wiąże się z koniecznością zadawania pozycji w czasie rzeczywistym przez nadrzędną jednostkę sterującą realizującą funkcję generatora trajektorii. W przypadku konstrukcji o dużej podatności musi on uwzględniać jej właściwości dynamiczne w celu ograniczenia wartości przyspieszeń do wartości niepowodujących nadmiernych drgań. Ograniczenia narzucone w jednej z osi powodują konieczność zmodyfikowania wartości w pozostałych osiach biorących udział w realizacji zadanej trajektorii. Konieczne jest uwzględnienie cieplnych warunków pracy silników i układów sterujących. Realizuje się to przez zastosowanie zabezpieczeń termicznych silników oraz dodatkowych w razie konieczności układów wspomagających chłodzenie. - WYTYCZNE Należy zaznaczyć cechę wspólną dla obrabiarek skrawających do metali, że występuje w nich zmienność obciążeń zarówno podczas wykonywania konkretnych operacji oraz w całym okresie eksploatacji. Dlatego też do obliczeń związanych z doborem silników przyjmuje się graniczne (maksymalne) wartości parametrów pracy lub ich najniekorzystniejsze skojarzenia ze względu na obciążenia. 6


 czas rozruchu, czas pracy przy obciążeniu stałym i czas postoju.")
7 SILNIKI ELEKTRYCZNE RODZAJE PRACY WG. PN-IEC 34-1:1997 Praca ciągła - S1. Praca z obciążeniem stałym, trwającym tak długo aż zostanie osiągnięty stan równowagi cieplnej. Praca dorywcza - S2. Praca z obciążeniem stałym, trwającym przez określony czas, krótszy niż czas potrzebny do osiągnięcia równowagi cieplnej, i następującym po tym czasie postojem, trwającym tak długo aż ustalona temperatury nie będzie się różnić o więcej niż 2oC od temperatury czynnika chłodzącego. Praca okresowa przerywana - S3. Szereg identycznych okresów pracy, z których każdy obejmuje czas pracy przy obciążeniu stałym i czas postoju. Przy tym rodzaju pracy okres jest taki, że prąd rozruchowy nie wpływa w sposób znaczący na nagrzewanie się maszyny. Praca okresowa przerywana z rozruchem - S4. Szereg identycznych okresów pracy, z których każdy obejmuje znaczący (ze względów cieplnych) czas rozruchu, czas pracy przy obciążeniu stałym i czas postoju. Praca okresowa przerywana z hamowaniem elektrycznym - S5. Szereg identycznych okresów pracy, z których każdy obejmuje czas rozruchu, czas pracy przy obciążeniu stałym, czas szybkiego hamowania elektrycznego oraz czas postoju. SILNIKI ELEKTRYCZNE RODZAJE PRACY WG. PN-IEC 34-1:1997 Praca okresowa długotrwała z przerwami jałowymi - S6. Szereg identycznych okresów pracy, z których każdy obejmuje czas pracy przy obciążeniu stałym i czas pracy przy biegu jałowym. W tym rodzaju pracy nie występuje czas postoju. Praca okresowa długotrwała z hamowaniem elektrycznym - S7. Szereg identycznych okresów pracy, z których każdy obejmuje czas rozruchu, czas pracy przy obciążeniu stałym oraz czas hamowania elektrycznego. W tym rodzaju pracy nie występuje czas postoju. Praca okresowa długotrwała ze zmianami prędkości obrotowej - S8. Szereg identycznych okresów pracy, z których każdy obejmuje czas pracy przy obciążeniu stałym odpowiadającym określonej uprzednio prędkości obrotowej i z jednego lub kilku czasów pracy przy innych obciążeniach odpowiadających innym prędkościom obrotowym (osiąganym np. przez zmianę liczby biegunów w przypadku silników indukcyjnych). W tym rodzaju pracy nie występuje czas postoju. Praca z nieokresowymi zmianami obciążenia i prędkości obrotowej - S9. Praca, przy której na ogół obciążenie i prędkość obrotowa zmieniają się nieokresowo w dopuszczalnym zakresie. Praca ta obejmuje często przeciążenia, które mogą przekraczać znacznie pełne obciążenie. SILNIKI ELEKTRYCZNE RODZAJE PRACY WG. PN-IEC 34-1:1997 7

8 Silniki asynchroniczne Silniki asynchroniczne rpm obr/min min -1 Silniki BLDC rpm obr/min min -1 8









9 Silniki Momentowy Silniki Momentowe Kompletne silniki momentowe 1FW3 Kompletne silniki momentowe są silnikami synchronicznymi AC, z magnesami trwałymi Są one szczególnie polecane do użycia jako bezpośrednie napędy w aplikacjach z zakresami momentu od 100Nm do 7000Nm, przy prędkościach od 50 do 1700 obr./min. Silniki momentowe 1FW6 (do zabudowy) Idealne dla osi obrotowych z wysokim momentem obrotowym i mogą być bezpośrednio zintegrowane z maszyną. Pracują z najwyższą precyzją i dynamiką, ponieważ sprężystość i luzy w systemie napędowym zostają całkowicie wyeliminowane a masa całkowita i siły tarcia zminimalizowane. Zastosowanie w maszynach zadaniowych, stołach obrotowych, osiach uchylnych i obrotowych oraz we wrzeciennikach frezarskich. Osiągają one moment obrotowy do 8570 Nm ZABUDOWA SILNIKÓW 9




, dużą dynamiką i szczególnie dużą")







10 ZABUDOWA SILNIKÓW Silniki Liniowe Silniki liniowe 1FN3 Główną zaletą silników liniowych jest wykluczenie efektów sprężystości, błędów geometrii, efektów tarcia i drgań własnych układu napędowego. Dzięki temu sterowanie ruchem jest maksymalnie dynamiczne i precyzyjne. Silniki liniowe z grupy 1FN3 odznaczają się prędkością przemieszczania (do 800 m/min), dużą dynamiką i szczególnie dużą precyzją. Stopień ochrony silnika wynosi IP65. Silnik osiąga maksymalną siłę N. Zastosowanie silników 1FN3 pozwala na rezygnację z mechanicznej części układu sterowania, tj. śruby tocznej, sprzęgła czy sprzęgła pasowego. Silniki liniowe 1FN6 Rodzina synchronicznych silników liniowych z chłodzeniem własnym lub wodnym. Zakres sił maksymalnych dla silników z chłodzeniem własnym wynosi od 157 do 8080 N, natomiast z chłodzeniem wodnym wynosi od 157 do 1890 N. Maksymalne prędkości przemieszczania sięgają 1280 m/min (z chłodzeniem własnym) i 852 m/min (z chłodzeniem wodnym). Silniki Liniowe 10
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Specyfikacja techniczna obrabiarki. wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40
 Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Przenośniki Układy napędowe
 Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
STUDIA I STOPNIA NIESTACJONARNE ELEKTROTECHNIKA
 PRZEDMIOT: ROK: 3 SEMESTR: 6 (letni) RODZAJ ZAJĘĆ I LICZBA GODZIN: LICZBA PUNKTÓW ECTS: RODZAJ PRZEDMIOTU: STUDIA I STOPNIA NIESTACJONARNE ELEKTROTECHNIKA Maszyny Elektryczn Wykład 30 Ćwiczenia Laboratorium
PRZEDMIOT: ROK: 3 SEMESTR: 6 (letni) RODZAJ ZAJĘĆ I LICZBA GODZIN: LICZBA PUNKTÓW ECTS: RODZAJ PRZEDMIOTU: STUDIA I STOPNIA NIESTACJONARNE ELEKTROTECHNIKA Maszyny Elektryczn Wykład 30 Ćwiczenia Laboratorium
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną
 Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2015 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne
 Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1. Zbigniew Krzemiński, MMB Drives sp. z o.o.
 Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Spis treści 3. Spis treści
 Spis treści 3 Spis treści Przedmowa 11 1. Pomiary wielkości elektrycznych 13 1.1. Przyrządy pomiarowe 16 1.2. Woltomierze elektromagnetyczne 18 1.3. Amperomierze elektromagnetyczne 19 1.4. Watomierze prądu
Spis treści 3 Spis treści Przedmowa 11 1. Pomiary wielkości elektrycznych 13 1.1. Przyrządy pomiarowe 16 1.2. Woltomierze elektromagnetyczne 18 1.3. Amperomierze elektromagnetyczne 19 1.4. Watomierze prądu
Silniki prądu stałego
 Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS..
 Strona 1/11 Układ ENI-EBUS/URSUS Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS.. Układ ten umożliwia: napędzanie i hamowanie
Strona 1/11 Układ ENI-EBUS/URSUS Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS.. Układ ten umożliwia: napędzanie i hamowanie
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
Silnik indukcyjny - historia
 Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Ćwiczenie 1 Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MASZYNY I NAPĘDY ELEKTRYCZNE. Kod przedmiotu: Emn 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność:
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: MASZYNY I NAPĘDY ELEKTRYCZNE. Kod przedmiotu: Emn 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność:
Wykład 4. Strumień magnetyczny w maszynie synchroniczne magnes trwały, elektromagnes. Magneśnica wirnik z biegunami magnetycznymi. pn 60.
 Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: MIKROMASZYNY I NAPĘDY ELEKTRYCZNE 2. Kod przedmiotu: Mne 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Eksploatacja
I. KARTA PRZEDMIOTU. Nazwa przedmiotu: MIKROMASZYNY I NAPĘDY ELEKTRYCZNE 2. Kod przedmiotu: Mne 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Eksploatacja
Pracę każdej prądnicy w sposób jednoznaczny określają następujące wielkości:
 Temat: Prądnice prądu stałego obcowzbudne i samowzbudne. Pracę każdej prądnicy w sposób jednoznaczny określają następujące wielkości: U I(P) I t n napięcie twornika - prąd (moc) obciążenia - prąd wzbudzenia
Temat: Prądnice prądu stałego obcowzbudne i samowzbudne. Pracę każdej prądnicy w sposób jednoznaczny określają następujące wielkości: U I(P) I t n napięcie twornika - prąd (moc) obciążenia - prąd wzbudzenia
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B
 PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B PODSTAWOWE PARAMETRY TECHNICZNE: VMC850B Przesuwy X/Y/Z 1000 / 560 / 650 mm Maks. obciążenie stołu 600 kg Stożek wrzeciona SK40 - Maks. moc wrzeciona 9/10,5
PIONOWE CENTRUM OBRÓBCZE CNC DIGIMA SMTCL VMC850B PODSTAWOWE PARAMETRY TECHNICZNE: VMC850B Przesuwy X/Y/Z 1000 / 560 / 650 mm Maks. obciążenie stołu 600 kg Stożek wrzeciona SK40 - Maks. moc wrzeciona 9/10,5
1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki:
 Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Ćwiczenie 3 Falownik
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Hamulce elektromagnetyczne. EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie
 Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
PAScz3. Elektryczne maszynowe napędy wykonawcze
 PAScz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
PAScz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Rys. 1. Krzywe mocy i momentu: a) w obcowzbudnym silniku prądu stałego, b) w odwzbudzanym silniku synchronicznym z magnesem trwałym
 w obcowzbudnym silniku prądu stałego, b) w odwzbudzanym silniku synchronicznym z magnesem trwałym") Tytuł projektu : Nowatorskie rozwiązanie napędu pojazdu elektrycznego z dwustrefowym silnikiem BLDC Umowa Nr NR01 0059 10 /2011 Czas realizacji : 2011-2013 Idea napędu z silnikami BLDC z przełączalną liczbą
Tytuł projektu : Nowatorskie rozwiązanie napędu pojazdu elektrycznego z dwustrefowym silnikiem BLDC Umowa Nr NR01 0059 10 /2011 Czas realizacji : 2011-2013 Idea napędu z silnikami BLDC z przełączalną liczbą
Wykład 1. Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi.
 Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Serwonapędy w automatyce i robotyce Wykład 1 iotr Sauer Katedra Sterowania i Inżynierii Systemów Wprowadzenie Serwonapęd - układ, którego zadaniem jest pozycjonowanie osi. roces pozycjonowania osi - sposób
Wymagania konieczne ( na ocenę: dopuszczający)
") Wymagania edukacyjne dla uczniów TE ZS Nr 1 w Olkuszu z przedmiotu : Montaż i konserwacja maszyn i urządzeń elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303 nauczyciel
Wymagania edukacyjne dla uczniów TE ZS Nr 1 w Olkuszu z przedmiotu : Montaż i konserwacja maszyn i urządzeń elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303 nauczyciel
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Pomiar prędkości obrotowej
 2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
SILNIKI PRĄDU STAŁEGO
 SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Wymagania edukacyjne dla uczniów kl. IV f TE ZS Nr 1 w Olkuszu
 Wymagania edukacyjne dla uczniów kl. IV f TE ZS Nr 1 w Olkuszu z przedmiotu : Eksploatacja maszyn, urządzeń i instalacji elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303
Wymagania edukacyjne dla uczniów kl. IV f TE ZS Nr 1 w Olkuszu z przedmiotu : Eksploatacja maszyn, urządzeń i instalacji elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK Nr programu : 311303
Maszyny i urządzenia elektryczne. Tematyka zajęć
 Nazwa przedmiotu Maszyny i urządzenia elektryczne Wprowadzenie do maszyn elektrycznych Transformatory Maszyny prądu zmiennego i napęd elektryczny Maszyny prądu stałego i napęd elektryczny Urządzenia elektryczne
Nazwa przedmiotu Maszyny i urządzenia elektryczne Wprowadzenie do maszyn elektrycznych Transformatory Maszyny prądu zmiennego i napęd elektryczny Maszyny prądu stałego i napęd elektryczny Urządzenia elektryczne
Specyfikacja techniczna do zapotrzebowania nr ELT/TME/000263/16
 Specyfikacja techniczna do zapotrzebowania nr ELT/TME/000263/16 I. DANE TECHNICZNE Do oferty dla każdego proponowanego silnika oferent dołączy również: - rysunek wymiarowy silnika; - charakterystyki momentu
Specyfikacja techniczna do zapotrzebowania nr ELT/TME/000263/16 I. DANE TECHNICZNE Do oferty dla każdego proponowanego silnika oferent dołączy również: - rysunek wymiarowy silnika; - charakterystyki momentu
I. Podstawowe wiadomości dotyczące maszyn elektrycznych
 3 I. Podstawowe wiadomości dotyczące maszyn elektrycznych 1.1 Rodzaje i klasyfikacja maszyn elektrycznych... 10 1.2 Rodzaje pracy... 12 1.3 Temperatura otoczenia i przyrost temperatury... 15 1.4 Zabezpieczenia
3 I. Podstawowe wiadomości dotyczące maszyn elektrycznych 1.1 Rodzaje i klasyfikacja maszyn elektrycznych... 10 1.2 Rodzaje pracy... 12 1.3 Temperatura otoczenia i przyrost temperatury... 15 1.4 Zabezpieczenia
Maszyny elektryczne Electrical machines. Energetyka I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Podstawowe definicje
 Podstawowe definicje Charakterystyki mechaniczne silnika o ruchu wirującym Ω = f(t) Prędkość wirowania Ω [rad/s] Bezwzględny uchyb prędkości ΔΩ = Ω 1 - Ω 1o Ω 1o ΔΩ = Ω 1 - Ω 1o Ω 1 Ω 2o Ω 2 Moment T [.
Podstawowe definicje Charakterystyki mechaniczne silnika o ruchu wirującym Ω = f(t) Prędkość wirowania Ω [rad/s] Bezwzględny uchyb prędkości ΔΩ = Ω 1 - Ω 1o Ω 1o ΔΩ = Ω 1 - Ω 1o Ω 1 Ω 2o Ω 2 Moment T [.
Dutchi Motors. Moc jest naszym towarem Świat jest naszym rynkiem INFORMACJE OGÓLNE
 INFORMACJE OGÓLNE Niniejsza karta katalogowa dotyczy trójfazowych silników asynchronicznych, niskiego napięcia, z wirnikiem klatkowym - serii DM1 w kadłubach odlewanych żeliwnych, budowy zamkniętej IP,
INFORMACJE OGÓLNE Niniejsza karta katalogowa dotyczy trójfazowych silników asynchronicznych, niskiego napięcia, z wirnikiem klatkowym - serii DM1 w kadłubach odlewanych żeliwnych, budowy zamkniętej IP,
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Wpływ tarcia na serwomechanizmy
 Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Laboratorium Maszyny CNC
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Układ ENI-EBUS/ELTR/ZF/AVE
 Strona 1/12 Układ ENI-EBUS/ELTR/ZF/AVE Układ ENI-EBUS/ELTR/ZF/AVE stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu ELECTRON firmy ELECTRONTRANS.. Układ ten umożliwia: napędzanie
Strona 1/12 Układ ENI-EBUS/ELTR/ZF/AVE Układ ENI-EBUS/ELTR/ZF/AVE stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu ELECTRON firmy ELECTRONTRANS.. Układ ten umożliwia: napędzanie
Alternator. Elektrotechnika w środkach transportu 125
 y Elektrotechnika w środkach transportu 125 Elektrotechnika w środkach transportu 126 Zadania alternatora: Dostarczanie energii elektrycznej o określonej wartości napięcia (ogranicznik napięcia) Zapewnienie
y Elektrotechnika w środkach transportu 125 Elektrotechnika w środkach transportu 126 Zadania alternatora: Dostarczanie energii elektrycznej o określonej wartości napięcia (ogranicznik napięcia) Zapewnienie
PL B1. Sposób regulacji prądu silnika asynchronicznego w układzie bez czujnika prędkości obrotowej. POLITECHNIKA GDAŃSKA, Gdańsk, PL
 PL 224167 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224167 (13) B1 (21) Numer zgłoszenia: 391278 (51) Int.Cl. H02P 27/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 224167 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224167 (13) B1 (21) Numer zgłoszenia: 391278 (51) Int.Cl. H02P 27/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Seria Jubileuszowa. Rozwiązania informatyczne. Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości. oszczędność energii. ochrona środowiska
 Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Układy napędowe maszyn - opis przedmiotu
 Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Obrabiarki sterowane numerycznie / Jerzy Honczarenko. Wyd. 1-1 dodr. (PWN). Warszawa, Spis treści WSTĘP 11
. Warszawa, Spis treści WSTĘP 11") Obrabiarki sterowane numerycznie / Jerzy Honczarenko. Wyd. 1-1 dodr. (PWN). Warszawa, 2017 Spis treści WSTĘP 11 CZĘŚĆ I. WIADOMOŚCI PODSTAWOWE 1. OBRABIARKI W PROCESIE WYTWARZANIA 17 1.1. Wprowadzenie
Obrabiarki sterowane numerycznie / Jerzy Honczarenko. Wyd. 1-1 dodr. (PWN). Warszawa, 2017 Spis treści WSTĘP 11 CZĘŚĆ I. WIADOMOŚCI PODSTAWOWE 1. OBRABIARKI W PROCESIE WYTWARZANIA 17 1.1. Wprowadzenie
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Softstart z hamulcem MCI 25B
 MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
TZL 420 TOKARKA KŁOWA PŁYTOWA STEROWANA NUMERYCZNIE
 TZL 420 TOKARKA KŁOWA PŁYTOWA STEROWANA NUMERYCZNIE PODSTAWOWE PARAMETRY Łoże 4-prowadnicowe Max. moment obrotowy wrzeciona: Max. masa detalu w kłach: Długość toczenia: Transporter wiórów w standardzie
TZL 420 TOKARKA KŁOWA PŁYTOWA STEROWANA NUMERYCZNIE PODSTAWOWE PARAMETRY Łoże 4-prowadnicowe Max. moment obrotowy wrzeciona: Max. masa detalu w kłach: Długość toczenia: Transporter wiórów w standardzie
Z powyższej zależności wynikają prędkości synchroniczne n 0 podane niżej dla kilku wybranych wartości liczby par biegunów:
 Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego
 Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.
, bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.") Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Poziome centra obróbkowe TBI SH 1000 (SK50)
") Poziome centra obróbkowe TBI SH 1000 (SK50) Precyzyjna, seryjna obróbka wielostronna oraz obróbka dużych skomplikowanych detali przestrzennych w jednym zamocowaniu. Ver_052017_02 Dbamy o solidną podstawę
Poziome centra obróbkowe TBI SH 1000 (SK50) Precyzyjna, seryjna obróbka wielostronna oraz obróbka dużych skomplikowanych detali przestrzennych w jednym zamocowaniu. Ver_052017_02 Dbamy o solidną podstawę
MODEL CIEPLNY ELEKTROWRZECIONA
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 39, s. 119-126, Gliwice 2010 MODEL CIEPLNY ELEKTROWRZECIONA JAN KOSMOL KRZYSZTOF LEHRICH Katedra Budowy Maszyn, Politechnika Śląska e-mail: jkosmol@polsl.pl e-mail:
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 39, s. 119-126, Gliwice 2010 MODEL CIEPLNY ELEKTROWRZECIONA JAN KOSMOL KRZYSZTOF LEHRICH Katedra Budowy Maszyn, Politechnika Śląska e-mail: jkosmol@polsl.pl e-mail:
DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA
 ZAŁĄCZNIK Z1.A do Specyfikacji Istotnych Warunków Zamówienia, postępowanie nr ZP/220/014/D/15 DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ
ZAŁĄCZNIK Z1.A do Specyfikacji Istotnych Warunków Zamówienia, postępowanie nr ZP/220/014/D/15 DOSTAWA WYPOSAŻENIA HAMOWNI MASZYN ELEKTRYCZNYCH DLA LABORATORIUM LINTE^2 OPIS PRZEDMIOTU ZAMÓWIENIA CZĘŚĆ
Ćwiczenie 1b. Silnik prądu stałego jako element wykonawczy Modelowanie i symulacja napędu CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Zasilanie silnika indukcyjnego poprzez układ antyrównoległy
 XL SESJA STUDENCKICH KÓŁ NAUKOWYCH Zasilanie silnika indukcyjnego poprzez układ antyrównoległy Wykonał: Paweł Pernal IV r. Elektrotechnika Opiekun naukowy: prof. Witold Rams 1 Wstęp. Celem pracy było przeanalizowanie
XL SESJA STUDENCKICH KÓŁ NAUKOWYCH Zasilanie silnika indukcyjnego poprzez układ antyrównoległy Wykonał: Paweł Pernal IV r. Elektrotechnika Opiekun naukowy: prof. Witold Rams 1 Wstęp. Celem pracy było przeanalizowanie
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie D-3
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D-3 Temat: Obliczenie częstotliwości własnej drgań swobodnych wrzecion obrabiarek Konsultacje: prof. dr hab. inż. F. Oryński
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie D-3 Temat: Obliczenie częstotliwości własnej drgań swobodnych wrzecion obrabiarek Konsultacje: prof. dr hab. inż. F. Oryński
LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH
 -CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
-CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
Układ ENI-ZNAP/RT6N1. Karta produktu
 Strona 1/10 Układ ENI-ZNAP/RT6N1 Układ ENI-ZNAP/RT6N1 stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do modernizowanych wagonów tramwajowych niskopodłogowych TATRA RT6N1.. Szczegółowy
Strona 1/10 Układ ENI-ZNAP/RT6N1 Układ ENI-ZNAP/RT6N1 stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do modernizowanych wagonów tramwajowych niskopodłogowych TATRA RT6N1.. Szczegółowy
Układy rozruchowe gwiazda - trójkąt od 7,5kW do 160kW
 UKŁADY GWIAZDA - TRÓJKĄT I REWERSYJNE Układy rozruchowe gwiazda - trójkąt od 7,5kW do 160kW Gotowe układy rozruchowe gwiazda - trójkąt do bezpośredniego montażu Znamionowy prąd AC3 / 400V: od 16A do 300A
UKŁADY GWIAZDA - TRÓJKĄT I REWERSYJNE Układy rozruchowe gwiazda - trójkąt od 7,5kW do 160kW Gotowe układy rozruchowe gwiazda - trójkąt do bezpośredniego montażu Znamionowy prąd AC3 / 400V: od 16A do 300A
TOKARKA KŁOWA SUPERCIĘŻKA PŁYTOWA STEROWANA NUMERYCZNIE
 TOKARKA KŁOWA SUPERCIĘŻKA PŁYTOWA STEROWANA NUMERYCZNIE TC3L-420 CNC Podstawowe parametry: Łoże pod suport 4-prowadnicowe Max. moment obrotowy wrzeciona Max. ciężar detalu w kłach Długość toczenia 180000
TOKARKA KŁOWA SUPERCIĘŻKA PŁYTOWA STEROWANA NUMERYCZNIE TC3L-420 CNC Podstawowe parametry: Łoże pod suport 4-prowadnicowe Max. moment obrotowy wrzeciona Max. ciężar detalu w kłach Długość toczenia 180000
Maszyny i napęd elektryczny I Kod przedmiotu
 Maszyny i napęd elektryczny I - opis przedmiotu Informacje ogólne Nazwa przedmiotu Maszyny i napęd elektryczny I Kod przedmiotu 06.2-WE-EP-MiNE1 Wydział Kierunek Wydział Informatyki, Elektrotechniki i
Maszyny i napęd elektryczny I - opis przedmiotu Informacje ogólne Nazwa przedmiotu Maszyny i napęd elektryczny I Kod przedmiotu 06.2-WE-EP-MiNE1 Wydział Kierunek Wydział Informatyki, Elektrotechniki i
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Spis treści SPIS TREŚCI
 Spis treści SPIS TREŚCI Wstęp 9 1. Pola elektromagnetyczne 11 1.1. Informacje wstępne 11 1.2. Źródła pół elektromagnetycznych w otoczeniu człowieka 14 1.3. Wpływ pola elektromagnetycznego na organizm ludzki
Spis treści SPIS TREŚCI Wstęp 9 1. Pola elektromagnetyczne 11 1.1. Informacje wstępne 11 1.2. Źródła pół elektromagnetycznych w otoczeniu człowieka 14 1.3. Wpływ pola elektromagnetycznego na organizm ludzki
TOKARKO-WIERTARKA DO GŁĘBOKICH WIERCEŃ STEROWANA NUMERYCZNIE WT2B-160 CNC WT2B-200 CNC
 TOKARKO-WIERTARKA DO GŁĘBOKICH WIERCEŃ STEROWANA NUMERYCZNIE WT2B-160 CNC WT2B-200 CNC Podstawowe parametry: Max. moment obrotowy wrzeciona Max. ciężar detalu w kłach Długość obrabianego otworu 40000 Nm
TOKARKO-WIERTARKA DO GŁĘBOKICH WIERCEŃ STEROWANA NUMERYCZNIE WT2B-160 CNC WT2B-200 CNC Podstawowe parametry: Max. moment obrotowy wrzeciona Max. ciężar detalu w kłach Długość obrabianego otworu 40000 Nm
Nr programu : nauczyciel : Jan Żarów
 Wymagania edukacyjne dla uczniów Technikum Elektrycznego ZS Nr 1 w Olkuszu przedmiotu : Pracownia montażu i konserwacji maszyn i urządzeń elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK
Wymagania edukacyjne dla uczniów Technikum Elektrycznego ZS Nr 1 w Olkuszu przedmiotu : Pracownia montażu i konserwacji maszyn i urządzeń elektrycznych na podstawie programu nauczania : TECHNIK ELEKTRYK
Od prostego pozycjonowania po synchronizację. Rozwiązania Sterowania Ruchem. Napędy Elektryczne i Sterowania
 Od prostego pozycjonowania po synchronizację Rozwiązania Sterowania Ruchem 1 Podstawy Silniki Sterowniki Serwo Sterowniki Motion Zajęcia praktyczne Przykłady parametryzacji serwonapędu Kreator parametryzacji
Od prostego pozycjonowania po synchronizację Rozwiązania Sterowania Ruchem 1 Podstawy Silniki Sterowniki Serwo Sterowniki Motion Zajęcia praktyczne Przykłady parametryzacji serwonapędu Kreator parametryzacji
Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi
 dr inż. ANDRZEJ DZIKOWSKI Instytut Technik Innowacyjnych EMAG Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi zasilanymi z przekształtników
dr inż. ANDRZEJ DZIKOWSKI Instytut Technik Innowacyjnych EMAG Parametry elektryczne i czasowe układów napędowych wentylatorów głównego przewietrzania kopalń z silnikami asynchronicznymi zasilanymi z przekształtników
PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM
 51 Maciej Gwoździewicz, Jan Zawilak Politechnika Wrocławska, Wrocław PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM REVIEW OF SINGLE-PHASE LINE
51 Maciej Gwoździewicz, Jan Zawilak Politechnika Wrocławska, Wrocław PRZEGLĄD KONSTRUKCJI JEDNOFAZOWYCH SILNIKÓW SYNCHRONICZNYCH Z MAGNESAMI TRWAŁYMI O ROZRUCHU BEZPOŚREDNIM REVIEW OF SINGLE-PHASE LINE
HYDROENERGETYKA PRĄDNICE ELEKTRYCZNE. Ryszard Myhan WYKŁAD 5
 HYDROENERGETYKA PRĄDNICE ELEKTRYCZNE Ryszard Myhan WYKŁAD 5 TYPY PRĄDNICY W małych elektrowniach wodnych są stosowane dwa rodzaje prądnic: prądnice asynchroniczne (indukcyjne) trójfazowe prądu przemiennego;
HYDROENERGETYKA PRĄDNICE ELEKTRYCZNE Ryszard Myhan WYKŁAD 5 TYPY PRĄDNICY W małych elektrowniach wodnych są stosowane dwa rodzaje prądnic: prądnice asynchroniczne (indukcyjne) trójfazowe prądu przemiennego;
POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu
 POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu PRACA DYPLOMOWA BADANIA I MODELOWANIE PRACY UKŁADU NAPĘDOWEGO SAMOCHODU Z AUTOMATYCZNĄ SKRZYNIĄ BIEGÓW Autor: inŝ. Janusz Walkowiak Promotor:
POLITECHNIKA POZNAŃSKA Wydział Maszyn Roboczych i Transportu PRACA DYPLOMOWA BADANIA I MODELOWANIE PRACY UKŁADU NAPĘDOWEGO SAMOCHODU Z AUTOMATYCZNĄ SKRZYNIĄ BIEGÓW Autor: inŝ. Janusz Walkowiak Promotor:
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
Silniki synchroniczne
 Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
JEDNOSTRONNA FORMATYZERKO CZOPIARKA Typ DCLB Specjal 2
 JEDNOSTRONNA FORMATYZERKO CZOPIARKA Typ DCLB Specjal 2 PRZEZNACZENIE Formatyzerko- czopiarka DCLB Specjal 2 przeznaczona jest do jednostronnego, przelotowego wykonywania rowków w listwach ościeżnic (z
JEDNOSTRONNA FORMATYZERKO CZOPIARKA Typ DCLB Specjal 2 PRZEZNACZENIE Formatyzerko- czopiarka DCLB Specjal 2 przeznaczona jest do jednostronnego, przelotowego wykonywania rowków w listwach ościeżnic (z