Próby ruchowe dźwigu osobowego
|
|
|
- Paweł Małecki
- 7 lat temu
- Przeglądów:
Transkrypt
1 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres zajęć: 1. Poznanie zasad konstruowania współczesnych dźwigów hydraulicznych z napędem pośrednim 2. Systemy sterowania pracą dźwigów osobowych analiza możliwości funkcjonalnych (systemy sterowania bezpośredniego oraz systemy sterowania pozwalające na kształtowanie charakterystyki rozruchowej dźwigu) 3. Przeprowadznie prób ruchowych platformy roboczej kabinowej dla różnych jej obciążeń nominalnych oraz dla różnych parametrów kształtujących pracę w fazie ruchu nieustalonego 1

2 1. SCHEMAT STANOWISKA - DŹWIG HYDRAULICZNY Z NAPĘDEM POŚREDNIM Charakterystyczne parametry konstrukcyjne dźwigu: przełożenie ruchu 2:1 - przemieszczenie kabiny w stosunku do przemieszczenia nurnika jest dwa razy większe, analogicznie prędkość kabiny jest także zdwojona do prędkości wysuwu nurnika. jako element roboczy został zastosowany trójstopniowy siłownik nurnikowy, z wewnętrzną synchronizacją wysuwu poszczególnych członów (schemat układu hydraulicznego przedstawiono poniżej). długość wysuwu siłownika [mm] maksymalny skok ramy kabiny [mm] udźwig maksymalny [kg] znamionowa moc silnika - 7,5 [kw] S1 S2 Blok zaworowy Trójstopniowy siłownik hydrauliczny ( przekrój obok ) L P EB G U EA 4 C D 8 E 5 H S3 S4 S5 3 F S6 S1 S2 S3 S4 S5 S6 Blok zasilacza 2


![[m/s 3 ] -tzw.efekt szarpnięcia z ang.](/docs-images/66/54490739/images/3-2.jpg "JERK System sterownia musi sankcjonować nadrzędne sygnały z systemu bezpieczeństwa BUDOWA SYSTEMU STEROWANIA 6 Dźwig hydrauli czny z napęde m pośredni m 5 4 3 sygnał sterujący")
3 ZAŁOŻENIA SYTEMU STEROWANIA Precyzyjne pozycjonowanie kabiny na przystankach z jednoczesnym zminimalizowaniem czasu potrzebnym do przejazdu kabiny pomiędzy poziomami dopuszczalna niedokładność pozycjonowania < 5,0 [mm] Zagwarantowanie komfortu przemieszczania kabiny poprzez zminimalizowanie wpływu elementów o silnie nieliniowej charakterystyce (linia hydrauliczna, liny nośne, mocowania lin) na końcowy efekt ruchu kabiny. W tym zakresie spełnienie warunków: nie przekraczania zmian prędkości powyżej wartości znormalizowanych ograniczenie prędkości zmian przyspieszeń do wartości znormalizowanych 6 10 [m/s 3 ] -tzw.efekt szarpnięcia z ang. JERK System sterownia musi sankcjonować nadrzędne sygnały z systemu bezpieczeństwa BUDOWA SYSTEMU STEROWANIA 6 Dźwig hydrauli czny z napęde m pośredni m sygnał sterujący obciążenie ramy przemieszczenie ramy i głowicy 2 przyspieszenie ramy i głowicy 1 1 Komputer klasy PC, 2 Karta analogowo cyfrowa RT-DAC4/PCI, 3 Falownik wraz z modułem rozszerzającym, 4 silnik indukcyjny, trójfazowy z wirnikiem klatkowym, 5 pompa zębata, 6 - dźwig hydrauliczny 3
 b) rejestracja drgań - ramy kabiny i głowicy (dwa czujniki przyspieszeń ADXL 105) c) rejestracja obciążenia kabiny (czujnik tensometryczny KARGO CONTROL) d)")
 REALIZACJA FUNKCJI ADAPTACYJNEGO STEROWANIA Adaptacyjność systemu sterowania może być realizowana w 3 etapach: Wybór funkcji sterującej ze")


4 SYSTEM DO POMIARU I AKWIZYCJI DANYCH Wielkości mierzone: a) rejestracja przemieszczeń - ramy kabiny i głowicy (dwa czujniki magnetostrykcyjne TLM 2250 oraz TLM 3500 ) b) rejestracja drgań - ramy kabiny i głowicy (dwa czujniki przyspieszeń ADXL 105) c) rejestracja obciążenia kabiny (czujnik tensometryczny KARGO CONTROL) d) rejestracja zmian ciśnienia oraz objętościowego natężenia przepływu Kondycjonowanie sygnału: a) cyfrowe filtry dolnoprzepustowe b) zasilanie zewnętrzne ( dwa akumulatory 12[V]) REALIZACJA FUNKCJI ADAPTACYJNEGO STEROWANIA Adaptacyjność systemu sterowania może być realizowana w 3 etapach: Wybór funkcji sterującej ze względu na obciążenie kabiny W zależności od wielkości obciążenia, wybierana jest odpowiednia funkcja sterująca (ze wcześniej zapisanych rodzin funkcji w układzie). Kształtowanie funkcji sterującej w zależności od przemieszczenia kabiny Układ w czasie rzeczywistym śledzi pozycje kabiny i w zależności od jej położenia dostosowuje prędkość przemieszczenia. Dostosowanie sygnału sterującego uwzględniającego zużycie eksploatacyjne Podczas ruchu analizowany jest poziom drgań, w przypadku przekroczenia wartości dopuszczalnych, układ zapamiętuje miejsce ich wystąpienia i podczas kolejnego przejazdu modyfikuje funkcje sterującą, w celu zagwarantowania komfortu jazdy. 4


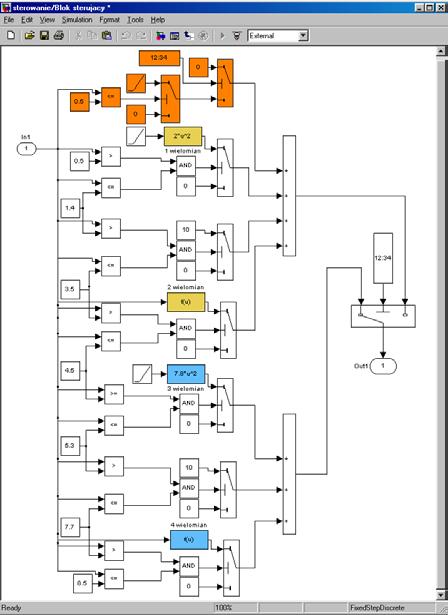
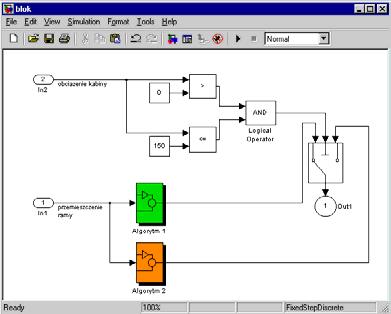
5 APLIKACJA STERUJĄCA ALGORYTM STERUJĄCY Ogólna charakterystyka sterowania ruchem dźwigu 5

![35 [m/s] Przebieg 2 Sterowanie poprzez falownik i](/docs-images/66/54490739/images/6-4.jpg "oprogramowanie NordCon,, obciążenie 300 [kg] JERK 22.")
6 Przebieg 1 Sterowanie bezpośrednie, obciążenie 300[kg] JERK [m/s 3 ] V śr 0.35 [m/s] Przebieg 2 Sterowanie poprzez falownik i oprogramowanie NordCon,, obciążenie 300 [kg] JERK [m/s 3 ] V śr 0.36 [m/s] 6
![Przebieg 3 Sterowanie poprzez falownik i zaprojektowany system, obciążenie 300 [kg] Wyniki JERK 6.075[m/s 3 ] V śr 0.](/docs-images/66/54490739/images/7-1.jpg "39 [m/s] ZAKRES POMIARÓW DO WYKONANIA PRZEZ STUDENTÓW Zaobserwować i oposać charakterystyczne zjawiska przy ruchu platformy kabinowej podczas staru z napędem bezpośrednim oraz dla stanów obciążenuie")
7 Przebieg 3 Sterowanie poprzez falownik i zaprojektowany system, obciążenie 300 [kg] Wyniki JERK 6.075[m/s 3 ] V śr 0.39 [m/s] ZAKRES POMIARÓW DO WYKONANIA PRZEZ STUDENTÓW Zaobserwować i oposać charakterystyczne zjawiska przy ruchu platformy kabinowej podczas staru z napędem bezpośrednim oraz dla stanów obciążenuie maksymalnym ładunkiem, w połowie obciążonej i dlas pustej platformy kabinowej (bez ładunku) Zaobserwować ruch platformy kabinowej podczas prób jej rozruchu (faza nieustalona pracy) dla wybranych nastaw zmiany czasu i maksymalnej częstotliwości dla tzw. charakterystyki trapezowej rozruchu o troz = 0,2 [s] oraz fgr = 60 Hz o troz = 1,0 [s] oraz fgr = 60 Hz o troz = 2,0 [s] oraz fgr = 60 Hz Zaobserwować ruch platformy kabinowej podczas prób jej rozruchu (faza nieustalona pracy) dla wybranych nastaw zmiany czasu i maksymalnej częstotliwości dla tzw. charakterystyki sterowania częstotliwością falownika kształtowanej z komutera w funkcji drogi przemieszczenia się platformy kabinowej (dla różnych czasów fazy początkowej ruchu oraz różnych czasów wyhamowywania) Dokonac rejestracji i akwizycji danych pomiarowych, przeprowadzić ich obróbkę, wyznaczyć współczynnik JERK, wyniki przedstawic w fornmie wykresów Literatura: 1. Kwaśniewski J: Dźwigi osobowe i towarowe, Budowa i eksploatacja; AGH Cichocki W., Michałowski S.: Specyfika kształtowania parametrów eksploatacyjnych w hydraulicznych dźwigach z napędem pośrednim, Czasopismo Techniczne, Zeszyt Mechanika 1-M/2005, s , XVIII Konferencja Naukowa Problemy Rozwoju Maszyn Roboczych 3. Wykład z przedmiotu Transport bliski Wiesław Cichocki 7
Badania współczynnika sprzężenia ciernego koło lina w ogranicznikach prędkości dźwigów osobowych
 INSTYTUT KONSTRUKCJI MASZYN SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO LABORATORIUM Badania współczynnika sprzężenia ciernego koło lina w ogranicznikach
INSTYTUT KONSTRUKCJI MASZYN SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO LABORATORIUM Badania współczynnika sprzężenia ciernego koło lina w ogranicznikach
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Struktura układu pomiarowego drgań mechanicznych
 Wstęp Diagnostyka eksploatacyjna maszyn opiera się na obserwacji oraz analizie sygnału uzyskiwanego za pomocą systemu pomiarowego. Pomiar sygnału jest więc ważnym, integralnym jej elementem. Struktura
Wstęp Diagnostyka eksploatacyjna maszyn opiera się na obserwacji oraz analizie sygnału uzyskiwanego za pomocą systemu pomiarowego. Pomiar sygnału jest więc ważnym, integralnym jej elementem. Struktura
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
Stanowisko do badania współczynnika tarcia
 Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Nazwa zamawiającego: Przemysłowy Instytut Automatyki i Pomiarów PIAP Al. Jerozolimskie Warszawa Warszawa,
 Nazwa zamawiającego: Przemysłowy Instytut Automatyki i Pomiarów PIAP Al. Jerozolimskie 202 02 486 Warszawa Warszawa, 04.06.2018 Zaproszenie do złożenia oferty cenowej ZO/05/05/2018 na dostawę elementów
Nazwa zamawiającego: Przemysłowy Instytut Automatyki i Pomiarów PIAP Al. Jerozolimskie 202 02 486 Warszawa Warszawa, 04.06.2018 Zaproszenie do złożenia oferty cenowej ZO/05/05/2018 na dostawę elementów
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO
 BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
Wymiar: Forma: Semestr: 30 h wykład VII 30 h laboratoria VII
 Pomiary przemysłowe Wymiar: Forma: Semestr: 30 h wykład VII 30 h laboratoria VII Efekty kształcenia: Ma uporządkowaną i pogłębioną wiedzę z zakresu metod pomiarów wielkości fizycznych w przemyśle. Zna
Pomiary przemysłowe Wymiar: Forma: Semestr: 30 h wykład VII 30 h laboratoria VII Efekty kształcenia: Ma uporządkowaną i pogłębioną wiedzę z zakresu metod pomiarów wielkości fizycznych w przemyśle. Zna
Technik elektryk 311[08] Zadanie praktyczne
![Technik elektryk 311[08] Zadanie praktyczne](/thumbs/53/32433735.jpg "Technik elektryk 311[08] Zadanie praktyczne") 1 Technik elektryk 311[08] Zadanie praktyczne Pracujesz w firmie zajmującej się naprawami urządzeń elektrycznych w siedzibie klienta. Otrzymałeś zlecenie z następującym opisem: Stolarz uruchomił pilarkę
1 Technik elektryk 311[08] Zadanie praktyczne Pracujesz w firmie zajmującej się naprawami urządzeń elektrycznych w siedzibie klienta. Otrzymałeś zlecenie z następującym opisem: Stolarz uruchomił pilarkę
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 5 Zastosowanie zaworu zwrotnego sterowanego w układach hydraulicznych maszyn roboczych Opracowanie: P. Jędraszczyk, Z. Kudżma, P. Osiński,
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 5 Zastosowanie zaworu zwrotnego sterowanego w układach hydraulicznych maszyn roboczych Opracowanie: P. Jędraszczyk, Z. Kudżma, P. Osiński,
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
MUE 404 SERIA MUE-404. Maszyny do badań wytrzymałości na rozciąganie/ściskanie/zginanie 600 kn- 2 MN.
 SERIA MUE-404 Maszyny do badań wytrzymałości na rozciąganie/ściskanie/zginanie 600 kn- 2 MN opis Maszyny testowe serii MUE-404 służą do przeprowadzania badań statycznych i dynamicznych z niską częstotliwością
SERIA MUE-404 Maszyny do badań wytrzymałości na rozciąganie/ściskanie/zginanie 600 kn- 2 MN opis Maszyny testowe serii MUE-404 służą do przeprowadzania badań statycznych i dynamicznych z niską częstotliwością
DRGANIA W BUDOWNICTWIE. POMIARY ORAZ OKREŚLANIE WPŁYWU DRGAŃ NA OBIEKTY I LUDZI - PRZYKŁADY
 DRGANIA W BUDOWNICTWIE. POMIARY ORAZ OKREŚLANIE WPŁYWU DRGAŃ NA OBIEKTY I LUDZI - PRZYKŁADY Krzysztof Gromysz Gliwice, 21 22 czerwca 2017 r. PLAN PREZENTACJI Wprowadzenie Pomiary drgań Sprzęt pomiarowy
DRGANIA W BUDOWNICTWIE. POMIARY ORAZ OKREŚLANIE WPŁYWU DRGAŃ NA OBIEKTY I LUDZI - PRZYKŁADY Krzysztof Gromysz Gliwice, 21 22 czerwca 2017 r. PLAN PREZENTACJI Wprowadzenie Pomiary drgań Sprzęt pomiarowy
Układ napędowy tramwaju niskopodłogowego na przykładzie układu ENI-ZNAP/RT6N1
 Układ napędowy tramwaju niskopodłogowego na przykładzie układu ENI-ZNAP/RT6N1 1 ZAKRES PROJEKTU ENIKI dla RT6N1 PROJEKT ELEKTRYCZNY OPROGRAMOWANIE URUCHOMIENIE Falownik dachowy ENI-FT600/200RT6N1 2 szt.
Układ napędowy tramwaju niskopodłogowego na przykładzie układu ENI-ZNAP/RT6N1 1 ZAKRES PROJEKTU ENIKI dla RT6N1 PROJEKT ELEKTRYCZNY OPROGRAMOWANIE URUCHOMIENIE Falownik dachowy ENI-FT600/200RT6N1 2 szt.
ТТ TECHNIKA TENSOMETRYCZNA
 ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne wagowe СТ5 Czujniki tensometryczne wagowe CT5 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne wagowe СТ5 Czujniki tensometryczne wagowe CT5 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO LABORATORIUM Badania wydajności przenośników bezcięgnowych
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO LABORATORIUM Badania wydajności przenośników bezcięgnowych
Do pojazdów o dmc do 3,5 t Do pojazdów o dmc pow. 3,5 t
 ` Do pojazdów o dmc do 3,5 t Do pojazdów o dmc pow. 3,5 t SPIS TREŚCI Linie do diagnostyki podwozia pojazdów o dmc do 3,5 t 3 Linie do diagnostyki podwozia pojazdów o dmc do 3,5 t opcje 4 Linie do diagnostyki
` Do pojazdów o dmc do 3,5 t Do pojazdów o dmc pow. 3,5 t SPIS TREŚCI Linie do diagnostyki podwozia pojazdów o dmc do 3,5 t 3 Linie do diagnostyki podwozia pojazdów o dmc do 3,5 t opcje 4 Linie do diagnostyki
Spis treści. 1. Badanie układu samodiagnostyki w silniku benzynowym typu 11. 1.1. Struktura systemu sterowania silnikiem benzynowym typu
 3 1. Badanie układu samodiagnostyki w silniku benzynowym typu 11 Motronic... 1.1. Struktura systemu sterowania silnikiem benzynowym typu Motronic.. 11 1.2. Algorytm pracy sterownika w silniku benzynowym
3 1. Badanie układu samodiagnostyki w silniku benzynowym typu 11 Motronic... 1.1. Struktura systemu sterowania silnikiem benzynowym typu Motronic.. 11 1.2. Algorytm pracy sterownika w silniku benzynowym
ТТ TECHNIKA TENSOMETRYCZNA
 ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne siłowe СТ4 Cyfrowe czujniki siły ST4 typu wykonane są ze stopu lub stali nierdzewnej i są przeznaczone do pomiaru sił rozciągających i ściskających w
ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne siłowe СТ4 Cyfrowe czujniki siły ST4 typu wykonane są ze stopu lub stali nierdzewnej i są przeznaczone do pomiaru sił rozciągających i ściskających w
STEROWANIE STRUKTUR DYNAMICZNYCH Model fizyczny semiaktywnego zawieszenia z tłumikami magnetoreologicznymi
 STEROWANIE STRUKTUR DYNAMICZNYCH Model fizyczny semiaktywnego zawieszenia z tłumikami magnetoreologicznymi mgr inż. Łukasz Jastrzębski Katedra Automatyzacji Procesów - Akademia Górniczo-Hutnicza Kraków,
STEROWANIE STRUKTUR DYNAMICZNYCH Model fizyczny semiaktywnego zawieszenia z tłumikami magnetoreologicznymi mgr inż. Łukasz Jastrzębski Katedra Automatyzacji Procesów - Akademia Górniczo-Hutnicza Kraków,
ТТ TECHNIKA TENSOMETRYCZNA
 ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne siłowe СТ3 Czujniki tensometryczne siłowe CT1 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
ТТ TECHNIKA TENSOMETRYCZNA Czujniki tensometryczne siłowe СТ3 Czujniki tensometryczne siłowe CT1 są przeznaczone do pomiaru sił i obciążeń w różnych dziedzinach inżynierii i przemysłu. Czujniki wykonane
WYMAGANIA TECHNICZNE DLA POMP WIROWYCH DŁAWNICOWYCH STOSOWANYCH W W.S.C.
 WYMAGANIA TECHNICZNE DLA POMP WIROWYCH DŁAWNICOWYCH STOSOWANYCH W W.S.C. Wymagania techniczne dla pomp dławnicowych do c.o. i c.t. (przeznaczonych głównie do wyposażania węzłów cieplnych grupowych i ciepłowni
WYMAGANIA TECHNICZNE DLA POMP WIROWYCH DŁAWNICOWYCH STOSOWANYCH W W.S.C. Wymagania techniczne dla pomp dławnicowych do c.o. i c.t. (przeznaczonych głównie do wyposażania węzłów cieplnych grupowych i ciepłowni
Badania pasowego układu cięgnowego dźwigu
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Maszyn Roboczych Ciężkich Laboratorium Dźwigów Ćwiczenie W6 Badania pasowego układu cięgnowego dźwigu Wersja robocza Tylko do użytku
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Maszyn Roboczych Ciężkich Laboratorium Dźwigów Ćwiczenie W6 Badania pasowego układu cięgnowego dźwigu Wersja robocza Tylko do użytku
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiIB Kierunek: Imię i nazwisko (e mail): Rok: Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych II Celem
Wydział: EAIiIB Kierunek: Imię i nazwisko (e mail): Rok: Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych II Celem
Próby wytrzymałościowe łożysk elastomerowych
 Próby wytrzymałościowe łożysk elastomerowych Specjalne oprogramowanie. Produkty zgodne z normą. Projekty na miarę. Doświadczenie Servosis posiada wieloletnie doświadczenie w dziedzinie badań materiałów
Próby wytrzymałościowe łożysk elastomerowych Specjalne oprogramowanie. Produkty zgodne z normą. Projekty na miarę. Doświadczenie Servosis posiada wieloletnie doświadczenie w dziedzinie badań materiałów
9.Tylko jedna odpowiedź jest poprawna. 10. Wybierz właściwą odpowiedź i zamaluj kratkę z odpowiadającą jej literą np., gdy wybrałeś odpowiedź A :
 6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
SERIA MES. Maszyny do badań wytrzymałości na ściskanie do 800 t.
 Maszyny do badań wytrzymałości na ściskanie do 800 t Badania próbek betonu, skał, cementu i materiałów budowlanych z obciążeniem od 150 do 800 t Seria MES. Opis Do badań próbek betonu, skał, cementu materiałów
Maszyny do badań wytrzymałości na ściskanie do 800 t Badania próbek betonu, skał, cementu i materiałów budowlanych z obciążeniem od 150 do 800 t Seria MES. Opis Do badań próbek betonu, skał, cementu materiałów
Softstart z hamulcem MCI 25B
 MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
MCI 25B softstart z hamulcem stałoprądowym przeznaczony jest to kontroli silników indukcyjnych klatkowych nawet do mocy 15kW. Zarówno czas rozbiegu, moment początkowy jak i moment hamujący jest płynnie
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA. Autor: Daniel Słowik
 Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Stanowisko do badań efektywności działania brykieciarki hydraulicznej.
 Stanowisko do badań efektywności działania brykieciarki hydraulicznej www.labioze.utp.edu.pl Zdjęcie poglądowe rozmieszczenia elementów brykieciarki, gdzie: 1 - zbiornik zasypowy połączony z blokiem prasującym;
Stanowisko do badań efektywności działania brykieciarki hydraulicznej www.labioze.utp.edu.pl Zdjęcie poglądowe rozmieszczenia elementów brykieciarki, gdzie: 1 - zbiornik zasypowy połączony z blokiem prasującym;
PR242012 23 kwietnia 2012 Mechanika Strona 1 z 5. XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów
 Rozszerzony System Transportowy: nowatorska technologia napędów") Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
Mechanika Strona 1 z 5 XTS (extended Transport System) Rozszerzony System Transportowy: nowatorska technologia napędów Odwrócona zasada: liniowy silnik ruch obrotowy System napędowy XTS firmy Beckhoff
HBB wentylator promieniowy
 ZASTOSOWANIE Wentylator przeznaczony do systemów transportu nieagresywnego, niewybuchowego i czystego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
ZASTOSOWANIE Wentylator przeznaczony do systemów transportu nieagresywnego, niewybuchowego i czystego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne,
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Wprowadzenie. Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego.
 Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
ĆWICZENIE NR.6. Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych
 ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
OPIS PRZEDMIOTU ZAMÓWIENIA:
 Akademia im. Jana Długosza w Częstochowie zaprasza do składania ofert cenowych na świadczenie usług urządzeń dźwigowych znajdujących się w obiektach Akademii zgodnie z załączonym opisem zamówienia. OPIS
Akademia im. Jana Długosza w Częstochowie zaprasza do składania ofert cenowych na świadczenie usług urządzeń dźwigowych znajdujących się w obiektach Akademii zgodnie z załączonym opisem zamówienia. OPIS
Mechanika Robotów. Wojciech Lisowski. 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka
 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka Poznań, 16.05.2012r. Raport z promocji projektu Nowa generacja energooszczędnych
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
3.0 FALOWNIKI ASTRAADA DRV
 ASTOR KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI - ASTRAADA DRV 3.0 FALOWNIKI ASTRAADA DRV INFORMACJE OGÓLNE O FALOWNIKACH ASTRAADA DRV 3.1 FALOWNIKI ASTRAADA DRV 3.2 2015-06-05 3.2-1 KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI
ASTOR KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI - ASTRAADA DRV 3.0 FALOWNIKI ASTRAADA DRV INFORMACJE OGÓLNE O FALOWNIKACH ASTRAADA DRV 3.1 FALOWNIKI ASTRAADA DRV 3.2 2015-06-05 3.2-1 KATALOG PRZEMIENNIKÓW CZĘSTOTLIWOŚCI
Materiały dydaktyczne. Semestr IV. Laboratorium
 Materiały dydaktyczne Napędy hydrauliczne Semestr IV Laboratorium 1 1. Zagadnienia realizowane na zajęciach laboratoryjnych Zagadnienia według treści zajęć dydaktycznych: Podstawowe rodzaje napędowych
Materiały dydaktyczne Napędy hydrauliczne Semestr IV Laboratorium 1 1. Zagadnienia realizowane na zajęciach laboratoryjnych Zagadnienia według treści zajęć dydaktycznych: Podstawowe rodzaje napędowych
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną
 Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
MSBN wentylator promieniowy
 ZASTOSOWANIE Wentylator przeznaczony do systemów transportu zapylonego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne, obróbka tworzyw sztucznych),
ZASTOSOWANIE Wentylator przeznaczony do systemów transportu zapylonego powietrza. Typowe zastosowania: transport pneumatyczny, nadmuch w układach suszenia (np. maszyny graficzne, obróbka tworzyw sztucznych),
Dlaczego pompa powinna być "inteligentna"?
 Dlaczego pompa powinna być "inteligentna"? W ciepłowniczych i ziębniczych układach pompowych przetłaczanie cieczy ma na celu transport ciepła, a nie, jak w pozostałych układach, transport masy. Dobrym
Dlaczego pompa powinna być "inteligentna"? W ciepłowniczych i ziębniczych układach pompowych przetłaczanie cieczy ma na celu transport ciepła, a nie, jak w pozostałych układach, transport masy. Dobrym
REKOBA Polska Specyfikacja systemu sterowania Kontakt: Telefon: Nazwa inwestycji: Oferta Zamówienie Termin wykonania:
 Informacje kliejenta Nazwa firmy: Data: Kontakt: Telefon: Nazwa inwestycji: Fax: Oferta Zamówienie E-Mail: Termin wykonania: Dane podstawowe Forma sieci: 3x400VAC z przewodem neutralnym Dźwig indiwidualny
Informacje kliejenta Nazwa firmy: Data: Kontakt: Telefon: Nazwa inwestycji: Fax: Oferta Zamówienie E-Mail: Termin wykonania: Dane podstawowe Forma sieci: 3x400VAC z przewodem neutralnym Dźwig indiwidualny
MUE 403 SERIE MUE-403. Maszyny do badań wytrzymałości na rozciąganie/ściskanie/zginanie t.
 SERIE MUE-403 Maszyny do badań wytrzymałości na rozciąganie/ściskanie/zginanie 5-100 t opis Maszyny testowe MUE-403 służą do przeprowadzania badań statycznych i dynamicznych z różnym obciążeniem, od 50
SERIE MUE-403 Maszyny do badań wytrzymałości na rozciąganie/ściskanie/zginanie 5-100 t opis Maszyny testowe MUE-403 służą do przeprowadzania badań statycznych i dynamicznych z różnym obciążeniem, od 50
Model procesu projektowania urządzeń mechatronicznych cz. 2
 Jakub Wierciak Model procesu projektowania cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Analiza funkcji systemu (Wierciak
Jakub Wierciak Model procesu projektowania cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Analiza funkcji systemu (Wierciak
Przemiennik częstotliwości VFD2800CP43A-21
 Przemiennik częstotliwości Specyfikacja techniczna Specyfikacja Oznaczenie modelu Znamionowy prąd wyjściowy Moc wyjściowa silnika Przeciążalność 530 A (lekki rozruch) 460 A (normalny rozruch) 280 kw (lekki
Przemiennik częstotliwości Specyfikacja techniczna Specyfikacja Oznaczenie modelu Znamionowy prąd wyjściowy Moc wyjściowa silnika Przeciążalność 530 A (lekki rozruch) 460 A (normalny rozruch) 280 kw (lekki
(Tekst mający znaczenie dla EOG) (Dz.U. L 191 z , s. 26)
 (Dz.U. L 191 z , s. 26)") 02009R0640 PL 09.01.2017 002.001 1 Dokument ten służy wyłącznie do celów informacyjnych i nie ma mocy prawnej. Unijne instytucje nie ponoszą żadnej odpowiedzialności za jego treść. Autentyczne wersje odpowiednich
02009R0640 PL 09.01.2017 002.001 1 Dokument ten służy wyłącznie do celów informacyjnych i nie ma mocy prawnej. Unijne instytucje nie ponoszą żadnej odpowiedzialności za jego treść. Autentyczne wersje odpowiednich
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI
 PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
WYMAGANIA TECHNICZNE DLA POMP WIROWYCH BEZDŁAWNICOWYCH STOSOWANYCH W W.S.C.
 WYMAGANIA TECHNICZNE DLA POMP WIROWYCH BEZDŁAWNICOWYCH STOSOWANYCH W W.S.C. Wymagania techniczne dla pomp bezdławnicowych do c.o., c.w. i c.t. (przeznaczonych głównie do wyposażania węzłów cieplnych indywidualnych)
WYMAGANIA TECHNICZNE DLA POMP WIROWYCH BEZDŁAWNICOWYCH STOSOWANYCH W W.S.C. Wymagania techniczne dla pomp bezdławnicowych do c.o., c.w. i c.t. (przeznaczonych głównie do wyposażania węzłów cieplnych indywidualnych)
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
OPIS PRZEDMIOTU ZAMÓWIENIA WYMAGANIA TECHNICZNE
 Załącznik nr 1 OPIS PRZEDMIOTU ZAMÓWIENIA WYMAGANIA TECHNICZNE Przedmiotem zamówienia jest zakup, dostawa, montaż i uruchomienie następujących środków trwałych służących do utworzenia i uruchomienia stanowisk
Załącznik nr 1 OPIS PRZEDMIOTU ZAMÓWIENIA WYMAGANIA TECHNICZNE Przedmiotem zamówienia jest zakup, dostawa, montaż i uruchomienie następujących środków trwałych służących do utworzenia i uruchomienia stanowisk
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Uniwersalne elektrohydrauliczne stanowisko dydaktyczno-badawcze
 Zeszyty Naukowe DWSPiT. Studia z Nauk Technicznych" 2015 (4), s. 75 84 GRZEGORZ ŁOMOTOWSKI Uniwersalne elektrohydrauliczne stanowisko dydaktyczno-badawcze Streszczenie: Artykuł poświęcony jest stanowisku
Zeszyty Naukowe DWSPiT. Studia z Nauk Technicznych" 2015 (4), s. 75 84 GRZEGORZ ŁOMOTOWSKI Uniwersalne elektrohydrauliczne stanowisko dydaktyczno-badawcze Streszczenie: Artykuł poświęcony jest stanowisku
CBM RE wentylator promieniowy
 ZASTOSOWANIE Wentylatory CBM RE znajdują zastosowanie: w centralach wentylacyjnych i klimatyzacyjnych, do chłodzenia szaf sterowniczych, modułów elektrycznych, elementów maszyn, nawiewu w procesach technologicznych,
ZASTOSOWANIE Wentylatory CBM RE znajdują zastosowanie: w centralach wentylacyjnych i klimatyzacyjnych, do chłodzenia szaf sterowniczych, modułów elektrycznych, elementów maszyn, nawiewu w procesach technologicznych,
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Falowniki serii 650G. Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw
 Falowniki serii 650G Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw AC650G Napędy AC Ogólnego zastosowania Zakres : 0,25 kw 7,5 kw Napędy AC650G idealnie nadają się do zastosowań wymagających dokładnego
Falowniki serii 650G Napędy AC Ogólnego Zastosowania 0.25 kw - 7.5 kw AC650G Napędy AC Ogólnego zastosowania Zakres : 0,25 kw 7,5 kw Napędy AC650G idealnie nadają się do zastosowań wymagających dokładnego
Zasady działania układu regulacyjnego PPU
 Zasady działania układu regulacyjnego PPU Układ PPU służy do regulacji wydajności grzewczej nagrzewnicy wodnej, tj. regulacji ilości przepływającego przez nagrzewnicę czynnika grzewczego, a co za tym idzie
Zasady działania układu regulacyjnego PPU Układ PPU służy do regulacji wydajności grzewczej nagrzewnicy wodnej, tj. regulacji ilości przepływającego przez nagrzewnicę czynnika grzewczego, a co za tym idzie
Rok akademicki: 2013/2014 Kod: EEL s Punkty ECTS: 4. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Elektronika przemysłowa Rok akademicki: 2013/2014 Kod: EEL-1-513-s Punkty ECTS: 4 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Specjalność:
Nazwa modułu: Elektronika przemysłowa Rok akademicki: 2013/2014 Kod: EEL-1-513-s Punkty ECTS: 4 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Specjalność:
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: OKRĘTOWA HYDRAULIKA SIŁOWA 2. Kod przedmiotu: Sh 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność: Eksploatacja
I. KARTA PRZEDMIOTU. Nazwa przedmiotu: OKRĘTOWA HYDRAULIKA SIŁOWA 2. Kod przedmiotu: Sh 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność: Eksploatacja
Wirtualne przyrządy kontrolno-pomiarowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wirtualne przyrządy kontrolno-pomiarowe dr inż.. Roland PAWLICZEK Laboratorium komputerowe Mechatroniki Cel zajęć ęć: Przyrząd pomiarowy:
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wirtualne przyrządy kontrolno-pomiarowe dr inż.. Roland PAWLICZEK Laboratorium komputerowe Mechatroniki Cel zajęć ęć: Przyrząd pomiarowy:
Informacja prasowa PI 090012
 Elektroniczny system sterownia dla hydraulicznego napędu układu skrętu oraz układu podnoszenia platformy do transportu kontenerów na terminalach portowych PI 090012 Platforma podczas pracy (Źródło: Novatech)
Elektroniczny system sterownia dla hydraulicznego napędu układu skrętu oraz układu podnoszenia platformy do transportu kontenerów na terminalach portowych PI 090012 Platforma podczas pracy (Źródło: Novatech)
Laboratorium Elementów i Układów Automatyzacji
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elementów i Układów Automatyzacji Wzmacniacz pomiarowy Instrukcja do ćwiczenia OGÓLNE ZASADY BEZPIECZEŃSTWA
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elementów i Układów Automatyzacji Wzmacniacz pomiarowy Instrukcja do ćwiczenia OGÓLNE ZASADY BEZPIECZEŃSTWA
MUF 401 SERIA MUF-401. Maszyny do badań dynamicznych do 100 Hz kn.
 SERIA MUF-401 Maszyny do badań dynamicznych do 100 Hz. 20-500 kn Opis Zaprojektowane, aby spełnić wymagania badań w zakresie częstotliwości średnich i wysokich, do ok. 100 Hz, i obciążeń od 20 do 500 kn.
SERIA MUF-401 Maszyny do badań dynamicznych do 100 Hz. 20-500 kn Opis Zaprojektowane, aby spełnić wymagania badań w zakresie częstotliwości średnich i wysokich, do ok. 100 Hz, i obciążeń od 20 do 500 kn.
Pompy w górnictwie Grzegorz Pakuła, Marian Strączyński SPIS TREŚCI
 Pompy w górnictwie Grzegorz Pakuła, Marian Strączyński SPIS TREŚCI I. WSTĘP II. SYSTEMY ODWADNIANIA KOPALŃ GŁĘBINOWYCH III. SYSTEMY ODWADNIANIA KOPALŃ ODKRYWKOWYCH IV. POMPY WIROWE IV.1. Podział pomp IV.1.1.
Pompy w górnictwie Grzegorz Pakuła, Marian Strączyński SPIS TREŚCI I. WSTĘP II. SYSTEMY ODWADNIANIA KOPALŃ GŁĘBINOWYCH III. SYSTEMY ODWADNIANIA KOPALŃ ODKRYWKOWYCH IV. POMPY WIROWE IV.1. Podział pomp IV.1.1.
KOMPAKTOWE AGREGATY HYDRAULICZNE
 KOMPAKTOWE AGREGATY HYDRAULICZNE MINIAGREGAT SPALINOWY KAH-2.8HP-R-Z8 MINIAGREGAT Z SILNIKIEM PRĄDU STAŁEGO 12 LUB 24 VDC KAH-12VDC-A-Z10 KAH-24VDC-D-Z8 MINIAGREGAT Z SILNIKIEM TRÓJFAZOWYM LUB JEDNOFAZOWYM
KOMPAKTOWE AGREGATY HYDRAULICZNE MINIAGREGAT SPALINOWY KAH-2.8HP-R-Z8 MINIAGREGAT Z SILNIKIEM PRĄDU STAŁEGO 12 LUB 24 VDC KAH-12VDC-A-Z10 KAH-24VDC-D-Z8 MINIAGREGAT Z SILNIKIEM TRÓJFAZOWYM LUB JEDNOFAZOWYM
Wózki elektryczne, magazynowe, podnośnikowe:
 Wózki elektryczne, magazynowe, podnośnikowe: ELEKTRYCZNY WÓZEK PODNOŚNIKOWY ECL1029 Napędzany elektrycznie wózek widłowy o ładowności 1000kg i wysokości podnoszenia 2900mm. Dzięki kompaktowej i lekkiej
Wózki elektryczne, magazynowe, podnośnikowe: ELEKTRYCZNY WÓZEK PODNOŚNIKOWY ECL1029 Napędzany elektrycznie wózek widłowy o ładowności 1000kg i wysokości podnoszenia 2900mm. Dzięki kompaktowej i lekkiej
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Trójfazowe silniki indukcyjne. 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu:
 A3 Trójfazowe silniki indukcyjne Program ćwiczenia. I. Silnik pierścieniowy 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu: a - bez oporów dodatkowych w obwodzie wirnika, b - z oporami
A3 Trójfazowe silniki indukcyjne Program ćwiczenia. I. Silnik pierścieniowy 1. Wyznaczenie charakterystyk rozruchowych prądu stojana i momentu: a - bez oporów dodatkowych w obwodzie wirnika, b - z oporami
Przemiennik częstotliwości falownik 1,5kW 3faz Twerd MFC710
 Dane aktualne na dzień: 28-09-2019 20:03 Link do produktu: https://www.tradelectra.pl/przemiennik-czestotliwosci-falownik-1-5kw-3faz-twerd-mfc710-p-82.html Przemiennik częstotliwości falownik 1,5kW 3faz
Dane aktualne na dzień: 28-09-2019 20:03 Link do produktu: https://www.tradelectra.pl/przemiennik-czestotliwosci-falownik-1-5kw-3faz-twerd-mfc710-p-82.html Przemiennik częstotliwości falownik 1,5kW 3faz
Załącznik 1. Obejmuje zdjęcia wykonanych stanowisk i pomocy dydaktycznych do laboratorium Specjalnych Metod Odlewania
 Załącznik 1 Obejmuje zdjęcia wykonanych stanowisk i pomocy dydaktycznych do laboratorium Specjalnych etod Odlewania Fot. 1. Ogólny widok laboratorium Napędu i Sterowania Hydrostatycznego na Wydziale Inżynierii
Załącznik 1 Obejmuje zdjęcia wykonanych stanowisk i pomocy dydaktycznych do laboratorium Specjalnych etod Odlewania Fot. 1. Ogólny widok laboratorium Napędu i Sterowania Hydrostatycznego na Wydziale Inżynierii
Układ ENI-ZNAP/RT6N1. Karta produktu
 Strona 1/10 Układ ENI-ZNAP/RT6N1 Układ ENI-ZNAP/RT6N1 stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do modernizowanych wagonów tramwajowych niskopodłogowych TATRA RT6N1.. Szczegółowy
Strona 1/10 Układ ENI-ZNAP/RT6N1 Układ ENI-ZNAP/RT6N1 stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do modernizowanych wagonów tramwajowych niskopodłogowych TATRA RT6N1.. Szczegółowy
Spis treści Zespół autorski Część I Wprowadzenie 1. Podstawowe problemy transportu miejskiego.transport zrównoważony
 Spis treści Zespół autorski 11 Część I Wprowadzenie 15 1. Podstawowe problemy transportu miejskiego.transport zrównoważony 17 1.1. Uwagi wstępne 17 1.2. Analiza przydatności zastosowań rozwiązań technicznych
Spis treści Zespół autorski 11 Część I Wprowadzenie 15 1. Podstawowe problemy transportu miejskiego.transport zrównoważony 17 1.1. Uwagi wstępne 17 1.2. Analiza przydatności zastosowań rozwiązań technicznych
PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH. Łódź maja 1997 r. SYMULATOR DO BADAŃ TRWAŁOŚCI ENDOPROTEZ STAWU KOLANOWEGO CZŁOWIEKA
 PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH Łódź 15-16 maja 1997 r. Adam Wieczorek, Monika Gierzyńska-Dolna Instytut Obróbki Plastycznej Metali i Tworzyw Sztucznych Politechniki Częstochowskiej SYMULATOR
PROBLEMY NIEKONWENCJONALNYCH UKŁADÓW ŁOŻYSKOWYCH Łódź 15-16 maja 1997 r. Adam Wieczorek, Monika Gierzyńska-Dolna Instytut Obróbki Plastycznej Metali i Tworzyw Sztucznych Politechniki Częstochowskiej SYMULATOR
Pytania egzaminacyjne dla Kierunku Elektrotechnika. studia II stopnia stacjonarne i niestacjonarne
 A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
A. Pytania wspólne dla Kierunku Pytania egzaminacyjne dla Kierunku Elektrotechnika studia II stopnia stacjonarne i niestacjonarne 1. Metody analizy nieliniowych obwodów elektrycznych. 2. Obwód elektryczny
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Układ napędu asynchronicznego ENI-ZNAP/3C przeznaczony do tramwajów MODERUS BETA MF02AC
 Układ napędu asynchronicznego ENI-ZNAP/3C przeznaczony do tramwajów MODERUS BETA MF02AC Układ napędu asynchronicznego ENI-ZNAP/3C Informacje ogólne Układ ENI-ZNAP/3C przeznaczony jest do stosowania w tramwajach
Układ napędu asynchronicznego ENI-ZNAP/3C przeznaczony do tramwajów MODERUS BETA MF02AC Układ napędu asynchronicznego ENI-ZNAP/3C Informacje ogólne Układ ENI-ZNAP/3C przeznaczony jest do stosowania w tramwajach
FABRYKA MASZYN BUDOWLANYCH "BUMAR" Sp. z o.o. Fabryka Maszyn Budowlanych ODLEWY ALUMINIOWE
 Fabryka Maszyn Budowlanych BUMAR Sp. z o.o. ul. Fabryczna 6 73-200 CHOSZCZNO ODLEWY ALUMINIOWE 1.PIASKOWE DO 100 KG 2.KOKILOWE DO 30 KG 3.CISNIENIOWE DO 3 KG 1. Zapewniamy atesty i sprawdzenie odlewów
Fabryka Maszyn Budowlanych BUMAR Sp. z o.o. ul. Fabryczna 6 73-200 CHOSZCZNO ODLEWY ALUMINIOWE 1.PIASKOWE DO 100 KG 2.KOKILOWE DO 30 KG 3.CISNIENIOWE DO 3 KG 1. Zapewniamy atesty i sprawdzenie odlewów
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
Szczegółowy opis laboratorium symulującego system produkcyjny
 Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Załącznik nr... (pieczęć firmowa Wykonawcy) Szczegółowy opis laboratorium symulującego system produkcyjny Opis pracowni: Laboratorium symulujące system produkcyjny zwane dalej pracownią systemów produkcyjnych
Ćwiczenie HP3. Instrukcja
 LABORATORIUM NAPĘDÓW HYDRAULICZNYCH I PNEUMATYCZNYCH INSTYTUT MASZYN ROBOCZYCH CIĘŻKICH WYDZIAŁ SAMOCHODÓW I MASZYN ROBOCZYCH POLITECHNIKA WARSZAWSKA ul. Narbutta 84, 02-524 Warszawa Ćwiczenie HP3 Dokładność
LABORATORIUM NAPĘDÓW HYDRAULICZNYCH I PNEUMATYCZNYCH INSTYTUT MASZYN ROBOCZYCH CIĘŻKICH WYDZIAŁ SAMOCHODÓW I MASZYN ROBOCZYCH POLITECHNIKA WARSZAWSKA ul. Narbutta 84, 02-524 Warszawa Ćwiczenie HP3 Dokładność
Digital LiftSentry: Cyfrowy system kontroli obciążenia
 Elevator Equipment Sp. z o.o. ul. Śliwkowa 4, 31-982 Kraków tel. 0048 12 643 80 23, fax. 0048 12 396 50 28 e-mail: biuro@elevator.pl www.elevator.pl Digital LiftSentry: Cyfrowy system kontroli obciążenia
Elevator Equipment Sp. z o.o. ul. Śliwkowa 4, 31-982 Kraków tel. 0048 12 643 80 23, fax. 0048 12 396 50 28 e-mail: biuro@elevator.pl www.elevator.pl Digital LiftSentry: Cyfrowy system kontroli obciążenia
ASQ systemy sterowania zestawami pomp
 systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych
 Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych Lp. Nazwa przedmiotu zamówienia ilość 1 Stanowisko dydaktyczne
Załącznik Formularz cenowy na CZĘŚĆ I wyposażenie wraz z montażem i uruchomieniem pracowni automatyki i robotyki w Zespole Szkół Technicznych Lp. Nazwa przedmiotu zamówienia ilość 1 Stanowisko dydaktyczne
BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT LOTNICTWA. Al. Krakowska 110/ Warszawa Tel.: Fax.:
 INSTYTUT LOTNICTWA Al. Krakowska 110/114 02-256 Warszawa Tel.: 22 846 00 11 Fax.: 22 846 44 32 AB 792 EGZ.NR : ZESPÓŁ LABORATORIÓW BADAŃ MATERIAŁÓW I KONSTRUKCJI LABORATORIUM BADAŃ KONSTRUKCJI Akredytowane
INSTYTUT LOTNICTWA Al. Krakowska 110/114 02-256 Warszawa Tel.: 22 846 00 11 Fax.: 22 846 44 32 AB 792 EGZ.NR : ZESPÓŁ LABORATORIÓW BADAŃ MATERIAŁÓW I KONSTRUKCJI LABORATORIUM BADAŃ KONSTRUKCJI Akredytowane
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników
 Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
Napędy urządzeń mechatronicznych
 1. Na rysunku przedstawiono schemat blokowy układu wykonawczego z napędem elektrycznym. W poszczególne bloki schematu wpisać nazwy jego elementów oraz wskazanych sygnałów. Napędy urządzeń mechatronicznych
1. Na rysunku przedstawiono schemat blokowy układu wykonawczego z napędem elektrycznym. W poszczególne bloki schematu wpisać nazwy jego elementów oraz wskazanych sygnałów. Napędy urządzeń mechatronicznych
PCD2K. Wysoki stopień zaawansowania Uniwersalność.
 PCD2K to uniwersalne oprogramowanie do prowadzenia badań dynamicznych lub statycznych za pomocą produkowanych przez nas maszyn testowych. Wysoki stopień zaawansowania Uniwersalność To najważniejsze charakterystyki
PCD2K to uniwersalne oprogramowanie do prowadzenia badań dynamicznych lub statycznych za pomocą produkowanych przez nas maszyn testowych. Wysoki stopień zaawansowania Uniwersalność To najważniejsze charakterystyki
ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE CZERWIEC 2010
 Zawód: technik mechatronik Symbol cyfrowy zawodu: 311[50] Numer zadania: 4 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu 311[50]-04-102 Czas trwania egzaminu: 240 minut ARKUSZ
Zawód: technik mechatronik Symbol cyfrowy zawodu: 311[50] Numer zadania: 4 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu 311[50]-04-102 Czas trwania egzaminu: 240 minut ARKUSZ