Programowanie mikrokontrolerów 2.0
|
|
|
- Dorota Natalia Adamczyk
- 9 lat temu
- Przeglądów:
Transkrypt
1 Programowanie mikrokontrolerów 2.0 Interfejs użytkownika Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 17 maja 2016

2 Najczęściej spotykane urządzenia realizujące interfejs użytkownika w aplikacjach mikrokontrolerowych Wyjście Dioda świecąca, LED (ang. light-emitting diode) Wyświetlacz LED: segmentowy albo matrycowy Wyświetlacz ciekłokrystaliczny, LCD (ang. liquid-crystal display): matrycowy albo specjalizowany Papier elektroniczny, e-papier (ang. electronic paper, e-paper, electronic ink, e-ink) Wejście Przycisk Dżojstik Klawiatura matrycowa, np. 4 4 Enkoder obrotowy Panel dotykowy, gładzik (ang. touchpad) Wyjście i wejście Ekran dotykowy (ang. touchscreen), czyli połączenie LCD z przeźroczystym panelem dotykowym
 Wejście Przycisk Dżojstik Klawiatura matrycowa, np. 4 4 Enkoder obrotowy Panel dotykowy, gładzik (ang.")
3 Różne rodzaje wyświetlaczy diodowych 11.3
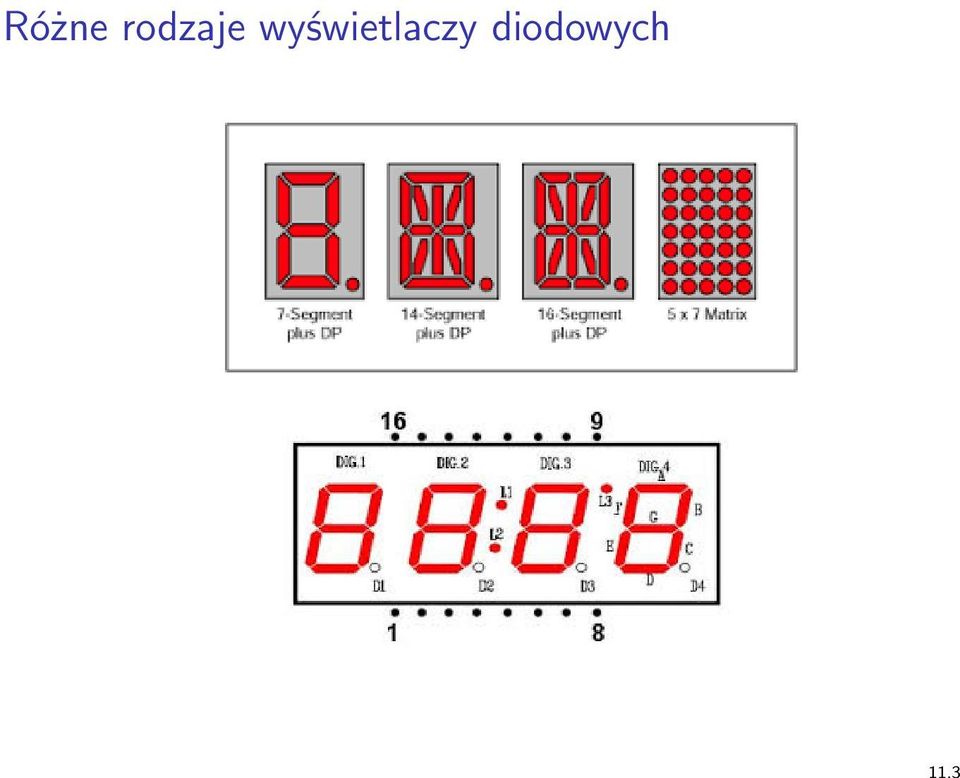
4 Wyświetlacz 7-segmentowy, idea działania Siedem diod świecących wyświetlających cyfry Zwykle też ósma dioda wyświetlająca punkt dziesiętny Dwie wersje wspólna anoda połączone anody wszystkich diod wspólna katoda połączone katody wszystkich diod Dalej opisujemy wyświetlacz ze wspólną anodą drugi działa analogicznie Aby wyświetlić cyfrę na anodę podajemy napięcie zasilania odpowiednie katody łączymy do masy przez rezystory o wartości kilkaset omów 11.4

5 11.5 Wyświetlacz 7-segmentowy wielocyfrowy Wyświetlacze łączy się w bloki kilkucyfrowe Osobne sterowanie każdej cyfry wymaga wielu wyprowadzeń mikrokontrolera: 8n dla n cyfr Często stosuje się sterowanie multipleksowane katody tych samych segmentów we wszystkich cyfrach łączy się ze sobą w danej chwili wyświetla się tylko jedną cyfrę, podając napięcie zasilania na jedną anodę i łącząc do masy (przez rezystory) odpowiednie katody każdą cyfrę wyświetla się kilkadziesiąt razy na sekundę wymaga n + 8 wyprowadzeń dla n cyfr
 odpowiednie katody każdą cyfrę wyświetla się kilkadziesiąt razy na sekundę wymaga n + 8")
6 11.6 Wyświetlacz 7-segmentowy, sterowanie Katodami można sterować bezpośrednio z wyprowadzeń mikrokontrolera aktywny poziom niski Maksymalny prąd wspólnej anody przekracza dopuszczalny prąd wyprowadzenia mikrokontrolera sterowanie przez tranzystor na wyjściu mikrokontrolera aktywny poziom niski Aby uniknąć cieni wyświetlanych cyfr na sąsiednich cyfrach, przełączenie z i-tej na (i + 1)-szą cyfrę (numeracja modulo liczba cyfr) powinno odbywać się tak: wyłącz katody cyfry i wyłącz anodę cyfry i włącz anodę cyfry i + 1 włącz katody cyfry i + 1
 powinno odbywać się tak: wyłącz katody cyfry i wyłącz anodę cyfry i włącz anodę cyfry i + 1 włącz")
7 Wyświetlacz 7-segmentowy, sterowanie za pomocą licznika Sygnały sterujące czterema anodami powinny wyglądać tak: Do wytworzenia takich przebiegów należy wykorzystać licznik Anody i katody przełącza się w przerwaniach licznika, np.: włączanie przy zdarzeniu uaktualnienia wyłączanie przy zdarzeniu zgodności Dodatkową zaletą takiego sterowania jest możliwość regulowania jasności wyświetlacza przez dobór stosunku wartości, przy której następuje zdarzenie zgodności, do wartości maksymalnej, do której zlicza licznik 11.7

8 11.8 Wyświetlacz 7-segmentowy w zestawie laboratoryjnym Wyjścia sterujące anodami i katodami typu otwarty dren Anody cyfra 1 PB0 cyfra 2 PA4 cyfra 3 PA1 cyfra 4 PA0 Katody a PB6 b PC7 c PA9 d PA8 e PB10 f PB4 g PB5 dp PB3 Dlaczego tak dziwnie?

9 Magistrala SPI Akronim Serial Peripheral Interface Interfejs szeregowy, synchroniczny, dwukierunkowy (ang. full-duplex) Bardzo często wykorzystywana do komunikacji z różnorodnymi wyświetlaczami, a także z pamięciami EEPROM, Flash oraz kartami SD

10 11.10 Warstwa fizyczna SPI Trzy wspólne linie SCK lub CLK jedno urządzenie (master) generuje na niej sygnał zegarowy MOSI (Master Out Slave In) master przesyła po niej dane do urządzenia slave MISO (Master In Slave Out) slave przesyła po niej dane do urządzenia master Do magistrali może być przyłączonych wiele urządzeń slave dane są przesyłane zawsze między urządzeniem master a jednym z urządzeń slave urządzenie master połączone jest z każdym urządzeniem slave za pomocą osobnej linii SS (Slave Select) lub CS (Chip Select)
 lub CS (Chip")
11 Protokół komunikacyjny SPI Master i slave mają wewnętrzny rejestr przesuwny Master inicjuje komunikację, podając na wejście SS wybranego urządzenia slave stan niski Master i slave umieszczają dane do przesłania w swoich rejestrach przesuwnych Master generuje sygnał zegarowy na linii SCK W każdym cyklu zegara: po linii MOSI jest przesyłany jeden bit z rejestru urządzenia master do rejestru urządzenia slave po linii MISO jest przesyłany jeden bit z rejestru urządzenia slave do rejestru urządzenia master zawartość rejestrów jest przesuwana o jeden bit

12 Protokół komunikacyjny SPI, cd. m 0 m 1 m 2 m 3 m 4 m 5 m 6 m MOSI 7 s 0 s 1 s 2 s 3 s 4 s 5 s 6 s 7 MISO Po n cyklach zegara, gdzie n jest rozmiarem rejestru przesuwnego, wartość z rejestru urządzenia slave trafia do rejestru urządzenia master i na odwrót Po przesłaniu wszystkich bitów master podaje na wejście SS urządzenia slave stan wysoki Gdy żadne urządzenie slave nie jest wybrane, sygnał zegarowy nie jest generowany

13 Warianty pracy SPI Kolejność przesyłania bitów (najpierw LSB lub najpierw MSB) jest konfigurowalna Gdy sygnał zegarowy nie jest generowany, linia SCK jest w stanie spoczynkowym i może to być stan niski lub wysoki Bity są przesyłane przy nieparzystym lub parzystym zboczu sygnału zegarowego Zarówno nieparzyste, jak i parzyste zbocze sygnału zegarowego może być zboczem narastającym lub opadającym, zależnie od stanu spoczynkowego sygnału zegarowego Mamy zatem osiem kombinacji ustawień

14 SPI w STM32 Mikrokontrolery STM32 mają po kilka układów peryferyjnych obsługujących magistralę SPI Jak zwykle trzeba poustawiać odpowiednie bity we właściwych rejestrach Można, a nawet należy, korzystać z przerwań i DMA Szczegóły w dokumentacji

15 LCD Wyświetlacz ciekłokrystaliczny składa się z matrycy ciekłokrystalicznej i sterownika Sterownik może być zintegrowany z matrycą w postaci modułu LCD komunikacja między mikrokontrolerem a sterownikiem odbywa się za pomocą interfejsu szeregowego (np. SPI) lub równoległego Sterownik może być zintegrowany w mikrokontrolerze niektóre modele STM32 mają taki sterownik sterownik LCD widoczny jako układ peryferyjny, dostępny poprzez odpowiednie rejestry
 lub równoległego Sterownik może być zintegrowany w mikrokontrolerze niektóre modele STM32 mają taki")
16 Moduł LCD Do zestawu laboratoryjnego możemy podłączyć moduł wyświetlacza graficznego ze sterownikiem ST7735S Rozdzielczość ekranu: pikseli Głębia koloru: 8, 9, 16 lub 18 bitów na piksel Interfejs to nieco zmodyfikowany, jednokierunkowy SPI, w dokumentacji sterownika nazywany 4-line Serial Interface SCK (w dokumentacji sterownika SCL) sygnał zegarowy SDA linia danych, odpowiednik MOSI, 8 bitów transmitowanych szeregowo A0 (w dokumentacji sterownika D/CX) dodatkowy 9. bit wybierający między danymi a poleceniami CS (w dokumentacji sterownika CSX) linia wyboru modułu Dokumentacja sterownika w katalogu /opt/arm/stm32/doc w pliku ST7735S_V1.1_ pdf
 linia wyboru modułu Dokumentacja sterownika w katalogu /opt/arm/stm32/doc w pliku")
17 11.17 Złącze modułu LCD Modułu LCD do zestawu laboratoryjnego podłącza się ośmioma przewodami Przykład Pin Złącze CN7 Opis LED 12 IOREF zasilanie diod podświetlających SCK 1 PC10 sygnał zegarowy SDA 3 PC12 linia danych A0 2 PC11 bit wybierający dane lub polecenie RESET 14 RESET zerowanie CS 4 PD2 wybór modułu GND 8 GND masa VCC 16 +3V3 zasilanie modułu

18 Sterownik LCD Nie będziemy omawiać, jak obsługuje się moduł LCD W katalogach /opt/arm/stm32/inc, /opt/arm/stm32/src umieściliśmy pliki z implementacją bardzo prostego sterownika Programowa obsługa SPI Tylko tryb tekstowy deklaracja interfejsu programowego w pliku lcd.h void LCDconfigure(void); void LCDclear(void); void LCDgoto(int textline, int charpos); void LCDputchar(char c); void LCDputcharWrap(char c); implementacja w pliku lcd.c czcionki o rozmiarach 8 16, 10 18, i w plikach fonts.h, fonts.c Pliki lcd_board_def.h, xcat.h pozwalają uniezależnić implementację od wyboru konkretnych wyprowadzeń, do których podłącza się moduł, choć nie zalecamy zmieniania proponowanej konfiguracji

19 11.19 Sterownik LCD ze sprzętową obsługą SPI i korzystający z DMA, wskazówki Korzystamy z układu SPI3 oraz kanału 0 i strumienia 5 DMA1 Wyprowadzenia CS i A0 obsługujemy programowo i konfigurujemy jak w wyżej omówionym sterowniku Na wyprowadzeniach SDA i SCK konfigurujemy funkcję alternatywną GPIO AF SPI3, wyjścia przeciwsobne o maksymalnej szybkości, bez rezystorów podciągających (parametry GPIO OType PP, GPIO High Speed, GPIO PuPd NOPULL) Nie zapominamy o włączeniu taktowania układów GPIOx, SPI3 i DMA1 w odpowiednich rejestrach układu RCC
 Nie zapominamy o włączeniu taktowania układów GPIOx, SPI3 i DMA1 w odpowiednich rejestrach układu RCC")
20 Konfiguracja SPI i DMA SPI ustawiamy w trybie master (bit MSTR), z programowym sterowaniem linią CS (bity SSM, SSI) oraz opcjonalnie jako interfejs jednoprzewodowy (bity BIDIMODE, BIDIOE) SPI3->CR1 = SPI_CR1_MSTR SPI_CR1_SSM SPI_CR1_SSI SPI_CR1_BIDIMODE SPI_CR1_BIDIOE; Bity BR[2:0] w rejestrze CR1 pozostawiamy wyzerowane, co daje maksymalną szybkość transmisji: f PCLK1 /2 Dane będziemy wysyłać za pomocą DMA SPI3->CR2 = SPI_CR2_TXDMAEN; Będziemy korzystać z przerwania DMA NVIC_EnableIRQ(DMA1_Stream5_IRQn); Na koniec włączamy układ SPI SPI3->CR1 = SPI_CR1_SPE;
![BR[2:0] w rejestrze CR1 pozostawiamy wyzerowane, co daje maksymalną szybkość transmisji: f PCLK1 /2 Dane będziemy wysyłać za pomocą DMA](/docs-images/49/18763483/images/page_20.jpg "SPI3->CR2 = SPI_CR2_TXDMAEN; Będziemy korzystać z przerwania DMA NVIC_EnableIRQ(DMA1_Stream5_IRQn); Na koniec włączamy układ SPI SPI3->CR1 =")
21 Inicjowanie wysyłania danych po SPI Dane z bufora w pamięci przesyłamy do układu SPI3 za pomocą DMA1 Inicjowanie transferu DMA musi być nieblokujące Transfery DMA muszą być kolejkowane transfer można zainicjować, jeśli DMA nie jest zajęte jeśli DMA jest zajęte, wstawiamy żądanie do kolejki Jeśli DMA jest wolne, aktywujemy linię CS i inicjujemy transfer DMA
22 Inicjowanie transferu DMA Ustawiamy odpowiednio linię A0 Konfigurujemy dokąd mają być przesyłane dane rejestr PAR skąd mają być kopiowane rejestr M0AR liczbę bajtów do przesłania rejestr NDTR DMA1_Stream5->PAR = (uint32_t)&spi3->dr; DMA1_Stream5->M0AR =...; DMA1_Stream5->NDTR =...;
23 Inicjowanie transferu DMA, cd. Konfigurujemy parametry transferu w rejestrze CR musimy ustawić nr kanału bity CHSEL[3:0] kierunek przesyłania danych bity DIR[1:0] przerwanie po zakończeniu transferu bit TCIE w rejestrze CR możemy opcjonalnie ustawić priorytet bity PL[1:0] zwiększanie adresu pamięci po każdym odczycie bit MINC rozmiar dostępu do pamięci bity MSIZE[1:0] rozmiar paczki bity MBURST[1:0] w rejestrze FCR możemy włączyć FIFO bit DMDIS ustawić próg FIFO bity FTH[1:0] DMA1_Stream5->CR = DMA_SxCR_PL_1 DMA_SxCR_DIR_0 DMA_SxCR_TCIE...; DMA1_Stream5->FCR =...; Startujemy transfer DMA1_Stream5->CR = DMA_SxCR_EN;
24 Obsługa zakończenia transferu DMA i transmisji SPI Zakończenie transferu DMA jest sygnalizowane za pomocą przerwania: ustawiany jest bit TCIF5 w rejestrze DMA1->HISR void DMA1_Stream5_IRQHandler() { uint32_t isr = DMA1->HISR; if (isr & DMA_HISR_TCIF5) {... } } W procedurze obsługi przerwania zerujemy znacznik zdarzenia DMA1->HIFCR = DMA_HIFCR_CTCIF5; Zakończenie transferu DMA nie oznacza jednak zakończenia transmisji SPI czekamy na ustawienie bitu TXE w rejestrze SPI3->SR czekamy na wyzerowanie bitu BSY w rejestrze SPI3->SR Po zakończeniu transmisji SPI jeśli kolejka nie jest pusta, inicjujemy następny transfer DMA jeśli kolejka jest pusta, dezaktywujemy linię CS
25 Klawiatura matrycowa Gdy mamy do obsłużenia wiele klawiszy, to możemy oczywiście każdy podłączyć do innego wejścia mikrokontrolera Przy dużej liczbie klawiszy zabraknie portów w mikrokontrolerze Dużo efektywniejszym sposobem jest połączenie klawiszy w matrycę Tak skonstruowana jest np. klawiatura w PC
26 11.26 Klawiatura matrycowa 16-klawiszowa Bardzo popularnym typem klawiatury matrycowej jest klawiatura klawiszy ułożonych w 4 wiersze i 4 kolumny Można spotkać np. w bankomatach, czytnikach kodów otwierających drzwi (domofony) itp.
27 11.27 Schemat modułu klawiatury A B C 0 # D K 1 K 2 K 3 K 4 W 1 W 2 W 3 W 4 KD 1 KD 2 KD 3 KD 4 WD 1 WD 2 WD 3 WD 4
28 Moduł klawiatury 4 4 Naciśnięcie klawisza zwiera linię wiersza z linią kolumny W mikrokontrolerze potrzebujemy po jednym wyprowadzeniu na każdy wiersz i na każdą kolumnę Zauważmy, że przy wciskaniu więcej niż jednego klawisza pewne kombinacje wciśniętych klawiszy są nierozróżnialne proszę podać przykład Można wymyślić wiele algorytmów obsługi takiej klawiatury Na kolejnych slajdach przedstawiamy naszą propozycję
29 Moduł klawiatury 4 4, cd. Do kolumn można się podpiąć bezpośrednio, odpowiednio do pinów K1 do K 4 przez diody, odpowiednio do pinów KD 1 do KD 4 Do wierszy można się podpiąć bezpośrednio, odpowiednio do pinów W1 do W 4 przez diody, odpowiednio do pinów WD1 do WD 4 Piny KD 1 do KD 4 i WD 1 do WD 4 są zdublowane Dla ustalenia uwagi, będziemy korzystać z pinów kolumn KD1, KD 2, KD 3, KD 4, które podłączymy odpowiednio do wyprowadzeń PC0, PC1, PC2, PC3 z pinów wierszy W1, W 2, W 3, W 4, które podłączymy odpowiednio do wyprowadzeń PC6, PC7, PC8, PC9 Dlaczego tak?
30 Algorytm inicjowania klawiatury 4 4 Skonfiguruj TIMx, aby zgłaszał przerwanie w regularnych odstępach czasu, np. co 10 ms, ale nie włączaj licznika Ustaw stan niski na wyprowadzeniach kolumn Skonfiguruj wyprowadzenia kolumn jako wyjścia przeciwsobne bez rezystorów podciągających Skonfiguruj wyprowadzenia wierszy jako wejścia z rezystorami podciągającymi, zgłaszające przerwanie przy zboczu opadającym Wyzeruj znaczniki przerwań wierszy przez wpisanie jedynek do odpowiedniego rejestru Uaktywnij przerwanie wierszy w układzie NVIC Kolejność inicjowania jest istotna
31 Algorytm obsługi klawiatury 4 4 W procedurze obsługi przerwania EXTI dezaktywuj przerwania wierszy w układzie EXTI wyzeruj znaczniki przerwań wierszy w układzie EXTI przez wpisanie jedynek do odpowiedniego rejestru ustaw stan wysoki na liniach kolumn wyzeruj rejestr CNT licznika uruchom licznik TIMx W procedurze obsługi przerwania TIMx wyzeruj znacznik przerwania TIMx przez wpisanie zera do odpowiedniego rejestru skanuj stan klawiatury jeśli nic nie jest wciśnięte zatrzymaj licznik ustaw stan niski na liniach kolumn wyzeruj znaczniki przerwań wierszy w układzie EXTI przez wpisanie jedynek do odpowiedniego rejestru aktywuj przerwania wierszy w układzie EXTI
32 Algorytm skanowania klawiatury 4 4 Dla każdej kolumny ustaw stan niski na wyprowadzeniu tej kolumny wczytaj stan wierszy tu jest haczyk ustaw stan wysoki na wyprowadzeniu tej kolumny decyduj, który klawisz w tej kolumnie należy uznać za wciśnięty i czy jest to przytrzymanie umieść informację o wciśniętym klawiszu w kolejce zdarzeń do obsłużenia
33 11.33 Enkoder obrotowy Bardzo popularnym elementem sterującym jest enkoder GND TI2 TI1 Może być mechaniczny lub optyczny Znajduje zastosowanie do regulacji siły głosu (zamiast klasycznego potencjometru), do wyboru pozycji z menu, ustawiania czasu itp.
34 11.34 Zasada pracy enkodera obrotowego Źródło: RM0383 Reference manual, STM32F411xC/E advanced ARM-based 32-bit MCUs
35 11.35 Moduł enkodera Widok złącza, patrząc od góry GND masa NC niepodłączony TI2 styk 2 NC niepodłączony TI1 styk 1
36 11.36 Obsługa enkodera w STM32 Liczniki w STM32 mają trzy tryby pracy przeznaczone do obsługi enkoderów Wykorzystamy licznik TIM3 Styk TIy podłączymy do wejścia TIM3 CHy licznika Jako TIM3 CH1 użyjemy wejścia PB4 mikrokontrolera, a jako TIM3 CH2 PB5 Do PB4 i PB5 podłączone są odpowiednio przyciski w prawo i do góry dżojstika pozwala to na zaobserwowanie, jak zbocza na tych wejściach wpływają na wartość licznika
37 Przykład konfiguracji enkodera (1) Kolejność włączania sygnałów zegarowych może być istotna dlaczego? RCC->APB1ENR = RCC_APB1ENR_TIM3EN; RCC->AHB1ENR = RCC_AHB1ENR_GPIOBEN; Zacznij od skonfigurowania licznika TIM3->CR1 = TIM_CR1_URS; Ustaw tryb 3 obsługi enkodera: licznik zlicza w górę i w dół przy zboczach na obu wejściach, zależnie od poziomu na drugim wejściu TIM3->SMCR = TIM_SMCR_SMS_1 TIM_SMCR_SMS_0;
38 Przykład konfiguracji enkodera (2) W rejestrze TIMx->CCMR1 konfiguruje się wejścia i wyjścia kanałów 1 i 2 licznika x bit CC1S 0 ustawia TIMx CH1 jako wejście sygnału TI1 bit CC2S 0 ustawia TIMx CH2 jako wejście sygnału TI2 bity ICyF włączają filtr cyfrowy dla sygnałów TIy, likwidujący przypadkowe zliczenia TIM3->CCMR1 = TIM_CCMR1_CC1S_0 TIM_CCMR1_CC2S_0 TIM_CCMR1_IC1F_0 TIM_CCMR1_IC1F_1 TIM_CCMR1_IC2F_0 TIM_CCMR1_IC2F_1;
39 Przykład konfiguracji enkodera (3) W rejestrze TIMx->CCER za pomocą bitu CCy P ustawia się kierunek zliczania kanału y licznika x Przy podłączeniach jak w tym przykładzie obracanie pokrętła w prawo zwiększa, a w lewo zmniejsza wartość licznika oba bity wyzerowane TIM3->CCER = 0; ten sam efekt uzyskuje się, ustawiając oba bity TIM3->CCER = TIM_CCER_CC1P TIM_CCER_CC2P; Odwrócenie kierunku zliczania (obracanie w prawo zmniejsza, a w lewo zwiększa wartość licznika) można uzyskać odwracając kierunek zliczania wejścia TI1 TIM3->CCER = TIM_CCER_CC1P; albo odwracając kierunek zliczania wejścia TI2 TIM3->CCER = TIM_CCER_CC2P;
40 Przykład konfiguracji enkodera (4) Ustawienie preskalera wydaje się być istotne TIM3->PSC = 0; Ustaw maksymalną wartość, po doliczeniu do której licznik się przekręci, np. liczbę zliczeń przy pełnym obrocie pomniejszoną o jeden TIM3->ARR = 95; TIM3->EGR = TIM_EGR_UG; Przypominamy, że ustawianie bitu UG w rejestrze TIMx->EGR wpływa na wartość rejestru TIMx->CNT W trybie obsługi enkodera bit DIR w rejestrze TIMx->CR1 jest ustawiany sprzętowo, zależnie od aktualnego kierunku zliczania
41 11.41 Przykład konfiguracji enkodera (5) Skonfiguruj wejścia licznika, funkcja alternatywna 2 GPIOafConfigure(GPIOB, 4, GPIO_OType_PP, GPIO_Low_Speed, GPIO_PuPd_UP, GPIO_AF_TIM3); GPIOafConfigure(GPIOB, 5, GPIO_OType_PP, GPIO_Low_Speed, GPIO_PuPd_UP, GPIO_AF_TIM3); ponieważ są to wejścia, parametry GPIO OType PP i GPIO Low Speed nie mają znaczenia w zestawie laboratoryjnym są zewnętrzne rezystory podciągające PB4 i PB5, ale gdyby ich nie było, trzeba użyć wewnętrznych parametr GPIO PuPd UP Konfigurowanie wejść powoduje wygenerowanie zboczy Włącz licznik dopiero po skonfigurowaniu wejść TIM3->CR1 = TIM_CR1_CEN;
42 Korzystanie z enkodera Można czytać wartość licznika rejestr TIMx->CNT Działają przerwania związane ze zdarzeniami zgodności i uaktualnienia wartości licznika Można nakłonić DMA do regularnego kopiowania wartości licznika do bufora w pamięci Można skonfigurować przerwania EXTI na liniach enkodera
43 11.43 Przerwania na liniach enkodera Włącz taktowanie układu SYSCFG w rejestrze RCC->APB2ENR Skonfiguruj przerwania za pomocą funkcji GPIOinConfigure z parametrami GPIO PuPd NOPULL, EXTI Mode Interrupt, EXTI Trigger Rising Falling, ale przed wywołaniem funkcji GPIOafConfigure Skasuj znaczniki przerwań w rejestrze EXTI->PR Jeśli potrzebujesz, skonfiguruj priorytet przerwań Włącz przerwania w układzie NVIC za pomocą funkcji NVIC EnableIRQ W procedurze obsługi przerwania, jeśli jest to przerwanie enkodera (sprawdź wartość EXTI->IMR & EXTI->PR) skasuj znacznik przerwania w rejestrze EXTI->PR odczytaj wartość licznika TIMx->CNT
44 Uwagi końcowe Obsługa interfejsu użytkownika jest czasochłonna (zwłaszcza LCD) nie jest krytyczna czasowo W procedurach obsługi przerwań nie należy wykonywać czasochłonnych czynności Czynności czasochłonne i mało krytyczne czasowo należy umieszczać w procedurach przerwań o niskim priorytecie wywłaszczania albo wręcz poza procedurami przerwań w głównej pętli programu Należy zadbać o synchronizację dostępu do struktur danych modyfikowanych w procedurach działających z różnymi priorytetami wywłaszczania
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Programowanie mikrokontrolerów 2.0
 4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Sterowanie podczerwienią, zaawansowane tryby liczników Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 8 grudnia 2016 Sterowanie podczerwienią
Programowanie mikrokontrolerów 2.0 Sterowanie podczerwienią, zaawansowane tryby liczników Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 8 grudnia 2016 Sterowanie podczerwienią
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Programowanie mikrokontrolerów 2.0
 6.1 Programowanie mikrokontrolerów 2.0 Liczniki Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 31 października 2017 Liczniki Układy sprzętowe wyposażone w wewnętrzny rejestr
6.1 Programowanie mikrokontrolerów 2.0 Liczniki Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 31 października 2017 Liczniki Układy sprzętowe wyposażone w wewnętrzny rejestr
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury
 Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
ZL8AVR. Płyta bazowa dla modułów dipavr
 ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Programowanie w językach asemblera i C
 Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515
 Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Wyświetlacze graficzne : 162x64 z kontrolerem S1D x60 z kontrolerem S1D15710
 S1D15705 Wyświetlacze graficzne : 162x64 z kontrolerem S1D15705 219x60 z kontrolerem S1D15710 S1D15710 Wyświetlacze S1D15705/S1D15710 są graficznymi wyświetlaczami ciekłokrystalicznymi. Wyposażone są w
S1D15705 Wyświetlacze graficzne : 162x64 z kontrolerem S1D15705 219x60 z kontrolerem S1D15710 S1D15710 Wyświetlacze S1D15705/S1D15710 są graficznymi wyświetlaczami ciekłokrystalicznymi. Wyposażone są w
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Programowanie mikrokontrolerów 2.0
 13.1 Programowanie mikrokontrolerów 2.0 Sterowanie fazowe Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Triak Triak jest półprzewodnikowym elementem przełączającym
13.1 Programowanie mikrokontrolerów 2.0 Sterowanie fazowe Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Triak Triak jest półprzewodnikowym elementem przełączającym
2. PORTY WEJŚCIA/WYJŚCIA (I/O)
") 2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
Systemy Wbudowane. Arduino - rozszerzanie. Podłączanie wyświetlacza LCD. Podłączanie wyświetlacza LCD. Podłączanie wyświetlacza LCD
 Wymagania: V, GND Zasilanie LED podswietlenia (opcjonalne) Regulacja kontrastu (potencjometr) Enable Register Select R/W (LOW) bity szyny danych Systemy Wbudowane Arduino - rozszerzanie mgr inż. Marek
Wymagania: V, GND Zasilanie LED podswietlenia (opcjonalne) Regulacja kontrastu (potencjometr) Enable Register Select R/W (LOW) bity szyny danych Systemy Wbudowane Arduino - rozszerzanie mgr inż. Marek
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
dv-2ps INSTRUKCJA OBSŁUGI
 dv-2ps INSTRUKCJA OBSŁUGI Manometr cyfrowy z programowalnymi stykami i wyjściem RS485 1. Diody LED statusu styków 2. Aktualna wartość ciśnienia 3. Przyłacze elektyczne 4. Przyłącze procesowe dv-2ps jest
dv-2ps INSTRUKCJA OBSŁUGI Manometr cyfrowy z programowalnymi stykami i wyjściem RS485 1. Diody LED statusu styków 2. Aktualna wartość ciśnienia 3. Przyłacze elektyczne 4. Przyłącze procesowe dv-2ps jest
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Magistrala I 2 C, układy MEMS Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 15 listopada 2016 Magistrala I 2 C Akronim Inter-Intergrated
Programowanie mikrokontrolerów 2.0 Magistrala I 2 C, układy MEMS Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 15 listopada 2016 Magistrala I 2 C Akronim Inter-Intergrated
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Propozycje dużego zadania zaliczeniowego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 29 listopada 2016 Wymagania ogólne Wymagamy osobistego
Programowanie mikrokontrolerów 2.0 Propozycje dużego zadania zaliczeniowego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 29 listopada 2016 Wymagania ogólne Wymagamy osobistego
Opis układów wykorzystanych w aplikacji
 Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
Opis układów wykorzystanych w aplikacji Układ 74LS164 jest rejestrem przesuwnym służącym do zamiany informacji szeregowej na równoległą. Układ, którego symbol logiczny pokazuje rysunek 1, posiada dwa wejścia
ĆWICZENIE 7. Wprowadzenie do funkcji specjalnych sterownika LOGO!
 ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ZL30ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Sprawozdanie z projektu MARM. Część druga Specyfikacja końcowa. Prowadzący: dr. Mariusz Suchenek. Autor: Dawid Kołcz. Data: r.
 Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
Programowanie mikrokontrolerów. 5 grudnia 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 5 grudnia 2007 Przerwania Umożliwiają asynchroniczną obsługę różnych zdarzeń, np.: zmiana stanu wejścia, zakończenie przetwarzania analogowo-cyfrowego,
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 5 grudnia 2007 Przerwania Umożliwiają asynchroniczną obsługę różnych zdarzeń, np.: zmiana stanu wejścia, zakończenie przetwarzania analogowo-cyfrowego,
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
AVREVB1. Zestaw uruchomieniowy dla mikrokontrolerów AVR. Zestawy uruchomieniowe www.evboards.eu
 AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32
 Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32 Autor: Dawid Lubomski Data opracowania streszczenia (wersja 2): 23.04.2018 Data wygłoszenia referatu: 06.04.2018 Wprowadzenie
Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32 Autor: Dawid Lubomski Data opracowania streszczenia (wersja 2): 23.04.2018 Data wygłoszenia referatu: 06.04.2018 Wprowadzenie
Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024
 Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024 Płytka idealna do nauki programowania mikrokontrolerów i szybkiego budowanie układów testowych. Posiada mikrokontroler ATmega16/ATmega32 i bogate
Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024 Płytka idealna do nauki programowania mikrokontrolerów i szybkiego budowanie układów testowych. Posiada mikrokontroler ATmega16/ATmega32 i bogate
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Kontroler Xelee Master DMX64/512 - Instrukcja obsługi. Kontroler Xelee Master DMX64/512 Firmware 1.1 Instrukcja Obsługi. www.nelectrica.
 Kontroler Xelee Master DMX64/512 Firmware 1.1 Instrukcja Obsługi www.nelectrica.com strona 1 Spis Treści 1. Informacje ogólne 2. Instalacja 2.1 Panel przedni... 5 2.2 Panel tylny... 6 2.3 Schemat podłączenia...
Kontroler Xelee Master DMX64/512 Firmware 1.1 Instrukcja Obsługi www.nelectrica.com strona 1 Spis Treści 1. Informacje ogólne 2. Instalacja 2.1 Panel przedni... 5 2.2 Panel tylny... 6 2.3 Schemat podłączenia...
WYKŁAD 5. Zestaw DSP60EX. Zestaw DSP60EX
 Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
LITEcompLPC1114. Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Sponsorzy:
 Sponsorzy:") LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Instrukcja obsługi i użytkowania Panel sterujący KPZ 52(E) 7
 7") Instrukcja obsługi i użytkowania Panel sterujący KPZ 52(E) 7 1 Wyświetlacz 2 Ekran LCD 0 : Waga znajduje się w położeniu zerowym STABLE : Waga znajduje się w położeniu spoczynkowym (bez zmiany wskazań
Instrukcja obsługi i użytkowania Panel sterujący KPZ 52(E) 7 1 Wyświetlacz 2 Ekran LCD 0 : Waga znajduje się w położeniu zerowym STABLE : Waga znajduje się w położeniu spoczynkowym (bez zmiany wskazań
Instrukcja obsługi elektronicznego licznika typu 524. Model 524. Licznik sumujący i wskaźnik pozycji typu Opis. 1. Opis
 Instrukcja obsługi elektronicznego licznika typu 524 Model 524 Model 524 jest urządzeniem wielozadaniowym i zależnie od zaprogramowanej funkcji podstawowej urządzenie pracuje jako: licznik sumujący i wskaźnik
Instrukcja obsługi elektronicznego licznika typu 524 Model 524 Model 524 jest urządzeniem wielozadaniowym i zależnie od zaprogramowanej funkcji podstawowej urządzenie pracuje jako: licznik sumujący i wskaźnik
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
1 Moduł Neuronu Cyfrowego SM
 1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1 Moduł Neuronu Cyfrowego SM Moduł Neuronu Cyfrowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Cyfrowych podłączonych do Sterownika Magistrali. Moduł odpowiada
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Mikrokontrolery ARM. Elektroniczny zegar / budzik / kalendarz z wyświetlaczem NIXIE. Opis projektu
 Mikrokontrolery ARM Elektroniczny zegar / budzik / kalendarz z wyświetlaczem NIXIE. Opis projektu 27.06.2016 Tomasz Jaroszewski Opis funkcjonalny W ramach projektu wykonany został elektroniczny zegar z
Mikrokontrolery ARM Elektroniczny zegar / budzik / kalendarz z wyświetlaczem NIXIE. Opis projektu 27.06.2016 Tomasz Jaroszewski Opis funkcjonalny W ramach projektu wykonany został elektroniczny zegar z
Uniwersalny sterownik silnika krokowego z portem szeregowym RS232 z procesorem AT90S2313 na płycie E200. Zestaw do samodzielnego montażu.
 microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Dostęp do portów mikrokontrolera ATmega32 język C laboratorium: 10 autorzy: dr
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Dostęp do portów mikrokontrolera ATmega32 język C laboratorium: 10 autorzy: dr
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701. SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701.
 SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
ZL29ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
Mikrokontrolery AVR techniczne aspekty programowania
 Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
ZL16AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168
 ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP
 Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
Programowalne Układy Cyfrowe Laboratorium
 Zdjęcie opracowanej na potrzeby prowadzenia laboratorium płytki przedstawiono na Rys.1. i oznaczono na nim najważniejsze elementy: 1) Zasilacz i programator. 2) Układ logiki programowalnej firmy XILINX
Zdjęcie opracowanej na potrzeby prowadzenia laboratorium płytki przedstawiono na Rys.1. i oznaczono na nim najważniejsze elementy: 1) Zasilacz i programator. 2) Układ logiki programowalnej firmy XILINX
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
INSTRUKCJA OBSŁUGI. Licznik amperogodzin ETM-01.1. ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 1. Zastosowanie INSTRUKCJA OBSŁUGI Licznik amperogodzin ETM-01.1 Licznik ETM jest licznikiem ładunku elektrycznego przystosowanym do współpracy z prostownikami galwanizerskimi unipolarnymi. Licznik posiada
1. Zastosowanie INSTRUKCJA OBSŁUGI Licznik amperogodzin ETM-01.1 Licznik ETM jest licznikiem ładunku elektrycznego przystosowanym do współpracy z prostownikami galwanizerskimi unipolarnymi. Licznik posiada
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Uniwersalny zestaw uruchomieniowy ZL4PIC
 Uniwersalny zestaw uruchomieniowy ZL4PIC Uniwersalny zestaw uruchomieniowy ZL4PIC przeznaczony jest testowania aplikacji realizowanych na bazie mikrokontrolerów PIC. Jest on przystosowany do współpracy
Uniwersalny zestaw uruchomieniowy ZL4PIC Uniwersalny zestaw uruchomieniowy ZL4PIC przeznaczony jest testowania aplikacji realizowanych na bazie mikrokontrolerów PIC. Jest on przystosowany do współpracy
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne.
 Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
Laboratorium mikroinformatyki. Szeregowe magistrale synchroniczne. Transmisja szeregowa charakteryzująca się niewielką ilością linii transmisyjnych może okazać się użyteczna nawet w wypadku zastosowania
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 DMA, przerwania Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 października 2018 DMA Akronim Direct Memory Access Przesyłanie danych
Programowanie mikrokontrolerów 2.0 DMA, przerwania Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 października 2018 DMA Akronim Direct Memory Access Przesyłanie danych
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Niektóre piny mogą pełnić różne role, zależnie od aktualnej wartości sygnałów sterujących.
 Podłączenie mikrokontrolera ATmega8: zasilanie 8 i 22
Podłączenie mikrokontrolera ATmega8: zasilanie 8 i 22
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x
 ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
Sterownik Spid Pant 8 i Ant 8. Podręcznik użytkowania
 Sterownik Spid Pant 8 i Ant 8 Podręcznik użytkowania Spis treści Spis treści...2 Wprowadzenie...3 Komplet...3 Dane techniczne...3 Panel sterujący...4 Panel tylny...5 Obsługa sterownika...6 Zmiana trybu
Sterownik Spid Pant 8 i Ant 8 Podręcznik użytkowania Spis treści Spis treści...2 Wprowadzenie...3 Komplet...3 Dane techniczne...3 Panel sterujący...4 Panel tylny...5 Obsługa sterownika...6 Zmiana trybu
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
Odbiór i dekodowanie znaków ASCII za pomocą makiety cyfrowej. Znaki wysyłane przez komputer za pośrednictwem łącza RS-232.
 Odbiór i dekodowanie znaków ASCII za pomocą makiety cyfrowej. Znaki wysyłane przez komputer za pośrednictwem łącza RS-232. Opracowanie: Andrzej Grodzki Do wysyłania znaków ASCII zastosujemy dostępny w
Odbiór i dekodowanie znaków ASCII za pomocą makiety cyfrowej. Znaki wysyłane przez komputer za pośrednictwem łącza RS-232. Opracowanie: Andrzej Grodzki Do wysyłania znaków ASCII zastosujemy dostępny w
Klawiatura matrycowa
 Klawiatura matrycowa Budowa matrycy klawiatury. Nieodzownym elementem każdego systemu mikroprocesorowego jest klawiatura. Umożliwia ona wpływ użytkownika na wykonywany przez niego program. Jednak teoretycznie
Klawiatura matrycowa Budowa matrycy klawiatury. Nieodzownym elementem każdego systemu mikroprocesorowego jest klawiatura. Umożliwia ona wpływ użytkownika na wykonywany przez niego program. Jednak teoretycznie
Architektura systemów komputerowych. dr Artur Bartoszewski
 Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Architektura systemów komputerowych dr Artur Bartoszewski Układy we/wy jak je widzi procesor? Układy wejścia/wyjścia Układy we/wy (I/O) są kładami pośredniczącymi w wymianie informacji pomiędzy procesorem
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4 firmy Atmel
 Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4
Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Programowanie mikrokontrolerów. 3 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 3 stycznia 2008 Liczniki, cd. Przypomnienie wiadomości o liczniku 0 Przykładowy program korzystający z licznika Ćwiczenia praktyczne Licznik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 3 stycznia 2008 Liczniki, cd. Przypomnienie wiadomości o liczniku 0 Przykładowy program korzystający z licznika Ćwiczenia praktyczne Licznik
Moduł uruchomieniowy mikrokontrolera MC68HC912B32
 Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
STEROWNIK LAMP LED MS-1 Konwerter sygnału 0-10V. Agropian System
 STEROWNIK LAMP LED MS-1 Konwerter sygnału 0-10V Agropian System Opis techniczny Instrukcja montażu i eksploatacji UWAGA! Przed przystąpieniem do pracy ze sterownikiem należy zapoznać się z instrukcją.
STEROWNIK LAMP LED MS-1 Konwerter sygnału 0-10V Agropian System Opis techniczny Instrukcja montażu i eksploatacji UWAGA! Przed przystąpieniem do pracy ze sterownikiem należy zapoznać się z instrukcją.
Instrukcja dla: Icomsat v1.0 SIM900 GSM/GPRS shield for Arduino oraz dla GPRS Shield produkcji Seeedstudio.
 Instrukcja dla: Icomsat v1.0 SIM900 GSM/GPRS shield for Arduino oraz dla GPRS Shield produkcji Seeedstudio. IComsat jest to shield GSM/GPRS współpracujący z Arduino oparty o moduł SIM900 firmy SIMCOM.
Instrukcja dla: Icomsat v1.0 SIM900 GSM/GPRS shield for Arduino oraz dla GPRS Shield produkcji Seeedstudio. IComsat jest to shield GSM/GPRS współpracujący z Arduino oparty o moduł SIM900 firmy SIMCOM.
Programator ICP mikrokontrolerów rodziny ST7. Full MFPST7. Lite. Instrukcja użytkownika 03/09
 Full Lite MFPST7 Programator ICP mikrokontrolerów rodziny ST7 Instrukcja użytkownika 03/09 Spis treści WSTĘP 3 CZYM JEST ICP? 3 PODŁĄCZENIE PROGRAMATORA DO APLIKACJI 4 OBSŁUGA APLIKACJI ST7 VISUAL PROGRAMMER
Full Lite MFPST7 Programator ICP mikrokontrolerów rodziny ST7 Instrukcja użytkownika 03/09 Spis treści WSTĘP 3 CZYM JEST ICP? 3 PODŁĄCZENIE PROGRAMATORA DO APLIKACJI 4 OBSŁUGA APLIKACJI ST7 VISUAL PROGRAMMER
Ćwiczenie 7 Matryca RGB
 IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -1- Ćwiczenie 7 Matryca RGB IMiO PW, LPTM, Ćwiczenie 7, Matryca RGB -2-1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z inną oprócz RS - 232 formą szeregowej
MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN
 MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
Kod produktu: MP01611-ZK
 ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
LEKCJA TEMAT: Zasada działania komputera.
 LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
ZL5PIC. Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887
 ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Projektowanie urządzeń mikroprocesorowych cz. 2 Wykład 4
 Projektowanie urządzeń mikroprocesorowych cz. 2 Wykład 4 Etapy projektowania Proste urządzenie mikroprocesorowe 2 Zasilanie mikrokontrolera W zależności od potrzeb można wykorzystać wariant podstawowy
Projektowanie urządzeń mikroprocesorowych cz. 2 Wykład 4 Etapy projektowania Proste urządzenie mikroprocesorowe 2 Zasilanie mikrokontrolera W zależności od potrzeb można wykorzystać wariant podstawowy
prostych wyświetlaczy
 Temat 2: Konfiguracja uniwersalnych portów wejścia/wyjścia (GPIO), obsługa prostych wyświetlaczy Celem ćwiczenia jest prezentacja sposobu konfiguracji i sterowania uniwersalnych portów GPIO μc z serii
Temat 2: Konfiguracja uniwersalnych portów wejścia/wyjścia (GPIO), obsługa prostych wyświetlaczy Celem ćwiczenia jest prezentacja sposobu konfiguracji i sterowania uniwersalnych portów GPIO μc z serii
Opis Ogólny OPIS OGÓLNY LICZNIKA AL154LI01.
 1. OPIS OGÓLNY LICZNIKA AL154LI01. 8 Przyrząd umożliwia pomiar, wyświetlenie na wyświetlaczu oraz przesłanie na komputer wartości ośmiu niezależnych liczników impulsów. Zerowanie oraz włączenie (uruchomienie)
1. OPIS OGÓLNY LICZNIKA AL154LI01. 8 Przyrząd umożliwia pomiar, wyświetlenie na wyświetlaczu oraz przesłanie na komputer wartości ośmiu niezależnych liczników impulsów. Zerowanie oraz włączenie (uruchomienie)
Instrukcja obsługi rejestratora SAV35 wersja 10
 Strona 1 z 7 1. OPIS REJESTRATORA SAV35 wersja 10. Rejestrator SAV35 umożliwia pomiar, przesłanie do komputera oraz zapamiętanie w wewnętrznej pamięci przyrządu wartości chwilowych lub średnich pomierzonych
Strona 1 z 7 1. OPIS REJESTRATORA SAV35 wersja 10. Rejestrator SAV35 umożliwia pomiar, przesłanie do komputera oraz zapamiętanie w wewnętrznej pamięci przyrządu wartości chwilowych lub średnich pomierzonych
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
EV6 223. Termostat cyfrowy do urządzeń chłodniczych
 Termostat cyfrowy do urządzeń chłodniczych Włączanie / wyłączanie Aby uruchomić urządzenie należy podłączyć zasilanie. (wyłączenie poprzez odpięcie zasilania) Wyświetlacz Po włączeniu i podczas normalnej
Termostat cyfrowy do urządzeń chłodniczych Włączanie / wyłączanie Aby uruchomić urządzenie należy podłączyć zasilanie. (wyłączenie poprzez odpięcie zasilania) Wyświetlacz Po włączeniu i podczas normalnej
Wydział Elektryczny. Katedra Telekomunikacji i Aparatury Elektronicznej. Konstrukcje i Technologie w Aparaturze Elektronicznej.
 Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Konstrukcje i Technologie w Aparaturze Elektronicznej Ćwiczenie nr 4 Temat: Sterowanie sekwencyjne wyświetlaczem
Politechnika Białostocka Wydział Elektryczny Katedra Telekomunikacji i Aparatury Elektronicznej Konstrukcje i Technologie w Aparaturze Elektronicznej Ćwiczenie nr 4 Temat: Sterowanie sekwencyjne wyświetlaczem
Licznik rewersyjny MD100 rev. 2.48
 Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Licznik rewersyjny MD100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Projektowanie Systemów Wbudowanych
 Projektowanie Systemów Wbudowanych Podstawowe informacje o płycie DE2 Autorzy: mgr inż. Dominik Bąk i mgr inż. Leszek Ciopiński 1. Płyta DE2 Rysunek 1. Widok płyty DE2 z zaznaczonymi jej komponentami.
Projektowanie Systemów Wbudowanych Podstawowe informacje o płycie DE2 Autorzy: mgr inż. Dominik Bąk i mgr inż. Leszek Ciopiński 1. Płyta DE2 Rysunek 1. Widok płyty DE2 z zaznaczonymi jej komponentami.