multitid wielofunkcyjny, samochodowego komputera
|
|
|
- Klaudia Pawlak
- 8 lat temu
- Przeglądów:
Transkrypt

1 multitid wielofunkcyjny, samochodowy komputer pokładowy (1) Kilkakrotnie podejmowałem wyzwanie zaprojektowania komputera pokładowego i to zarówno takiego, który korzysta z oryginalnego, wbudowanego w deskę rozdzielczą wyświetlacza pokładowego, jak i własnego LCD, OLED czy TFT. Korzystając z doświadczenia, które zdobyłem projektując wspomniane urządzenia, postanowiłem zbudować komputer pokładowy będący syntezą wcześniej zastosowanych rozwiązań, lecz wyróżniający się największą i niespotykaną w innych rozwiązaniach funkcjonalnością. Miał to być komputer, który tchnie nowe życie w starsze pojazdy. MultiTID, czyli urządzenie, o którym mowa, ma możliwość współpracy z oryginalnymi radioodbiornikami montowanymi w pojazdach spod znaku Opla, a więc daje możliwość zastąpienia wbudowanego (dość archaicznego), trójfunkcyjnego wyświetlacz pokładowego nazywanego skrótem TID (Triple Info Display) przez niezwykle efektowny, duży i szerokoekranowy kolorowy wyświetlacz TFT o przekątnej 4.2. Co więcej, ma możliwość pomiaru spalania i rejestracji przeróżnych statystyk w pojazdach wyposażonych w instalację zasilania gazem LPG i to niezależnie dla obu rodzajów paliwa. Rekomendacje: prezentowany komputer pokładowy może zostać zamontowany w pojeździe dowolnej marki. W pojeździe innej marki po prostu nie będzie korzystał z funkcjonalności wyświetlania danych za pomocą wyświetlacza radioodbiornika. Oto lista funkcji, w które jest wyposażony komputer pokładowy multitid:: Pełna funkcjonalność typowego, samochodowego komputera pokładowego. Możliwość emulacji wyświetlacza TID montowanego w pojazdach marki Opel (8- i 10-znakowego), a więc możliwość obsługi komunikatów wysyłanych przez oryginalne radioodbiorniki. Obsługa dwóch rodzajów paliwa (Pb/LPG), Czytelny, intuicyjny, graficzny interfejs użytkownika wzorowany na najnowszych rozwiązaniach z segmentu Premium. Możliwość regulacji jasności podświetlenia wyświetlacza graficznego zgodnie z ustawieniem jasności podświetlenia zegarów pojazdu. Łatwość instalacji uzyskana poprzez zastosowanie oryginalnego złącza połączeniowego wyświetlacza TID (oraz złącz dodatkowych dla funkcji spalania). Ponadto, postawiłem dość wysokie wymagania dotyczące funkcjonalności komputera pokładowego, którego zdecydowałem się wyposażyć w następujące funkcje: 20 ELEKTRONIKA PRAKTYCZNA 12/2016
2 multitid wielofunkcyjny, samochodowy komputer pokładowy Pokazywanie temperatury na zewnątrz pojazdu (z zastosowaniem czujnika montowanego w pojazdach marki Opel) oraz ostrzeżenia o śliskiej nawierzchni (dla temperatury zewnętrznej niższej, niż 5 C). Pokazywanie chwilowej prędkości pojazdu (w km/godz.). Pokazywanie średniej prędkości pojazdu na przejechanym odcinku drogi (w km/godz.), Pokazywanie maksymalnej prędkości pojazdu na przejechanym odcinku drogi (w km/godz.), Pokazywanie chwilowego zużycia paliwa (w l/godz. dla prędkości 5 km/godz. oraz l/100 km dla pozostałych prędkości) dla obu rodzajów paliwa. Pokazywanie średniego zużycia paliwa (w l/100 km) dla obu rodzajów paliwa. Pokazywanie paliwa pozostającego w baku pojazdu(w l, jak i graficznie bargraf) dla obu rodzajów paliwa. Pokazywanie przewidywanego zasięgu pojazdu na paliwie pozostającym w baku pojazdu (w km) dla obu rodzajów paliwa. Pokazywanie przejechanego dystansu od ostatniego kasowania (w km). Pokazywanie aktualnego czasu i daty (z zastosowaniem mechanizmu podtrzymania zasilania). Pokazywanie statystyk spalania na każde przejechane 10 km/1 km (dla ostatnio przejechanych 150 i 15 km) dla obu rodzajów paliwa. Automatyczna detekcja bieżącego rodzaju paliwa. Jak widać, cel jest dość ambitny, jednak doświadczenia zdobyte przy konstruowaniu poprzednich urządzeń upraszczają znacząco proces jego implementacji. Zanim jednak przejdziemy do opisu samego urządzenia warto przybliżyć nieco temat pokładowego wyświetlacza TID, gdyż możliwość jego emulacji jest jedną z głównych zalet i zarazem unikalnych cech urządzenia multitid, bo umożliwia współpracę sterownika z oryginalnymi radioodbiornikami dedykowanymi do pojazdów spod znaku Opla. Co więcej, sterownik nasz obsługuje wszystkie rodzaje radioodbiorników montowanych przez tego producenta, które to wyposażono w magistralę sterującą z sygnałami SDA/ SCL/MRQ i może emulować wyświetlacze TID z 8-znakową i 10-znakową organizacją pola tekstowego, a więc wyświetlacze pokładowe montowane w takich modelach jak Astra F, Corsa B, Combo, Astra G, Corsa C, Meriva, Movano, Omega B, Vectra B, Tigra. Wyjątkiem są nowsze pojazdy wyposażone w wyświetlacz pokładowy obsługujący magistralę CAN. Ta cecha naszego sterownika czyni go wyjątkowo atrakcyjnym, z punktu widzenia użytkownika pojazdu tej marki i co warto podkreślić, nie znajduje odpowiednika ani w konstrukcjach amatorskich, ani też na rynku komercyjnym. Zanim przejdziemy do szczegółów implementacyjnych warto przyjrzeć się rozwiązaniu zastosowanemu przez Opla, gdyż jest to przykład dobrze wykonanej pracy inżynierskiej i dogłębnie przemyślanej konstrukcji. Zgodnie z tym, o czym wspominano wcześniej, firma Opel od wielu lat stosuje w swoich pojazdach zewnętrzne, zintegrowane z deską rozdzielczą, podświetlane wyświetlacze LCD, których funkcje zależne są od modelu auta, jego wyposażenia, roku produkcji jak i modelu samego wyświetlacza. Ogólnie rzecz ujmując można wyróżnić kilka typów wyświetlaczy, których poglądowe porównanie przedstawiono w tabeli 1. Poza wymienionymi, podstawowymi różnicami, w zależności od roku produkcji i wyposażenia pojazdu, stosowano wyświetlacze o różnej organizacji i rozdzielczości. Starsze miały organizację 1 8 znaków (tylko wielkie litery Tabela 1. Porównanie funkcjonalności wyświetlaczy pokładowych stosowanych przez firmę Opel Nazwa Funkcje Typ magistrali sterującej DID Data, godzina, obsługa radioodbiornika TID Funkcje DID + temperatura zewnętrzna Zmodyfikowana I 2 C MID Funkcje TID + obsługa komputera pokładowego NAVI Funkcje MID + obsługa nawigacji satelitarnej CAN DODATKOWE MATERIAŁY NA FTP: ftp://ep.com.pl user: 66532, pass: 8nnjjeaa W ofercie AVT* AVT-5562 Podstawowe informacje: ynapięcie zasilania: 8 15 V DC. ymaksymalny prąd obciążenia (z napięcia +12 V): 10 ma. yprąd podtrzymania zegara RTC (z napięcia BATT): 1 ma. ymaksymalny prąd podświetlenia (z napięcia ILL+): 75 ma. ydokładność pomiaru temperatury: 1 C. yzakres pomiarowy temperatury zewnętrznej: C. yzakres pomiarowy prędkości pojazdu: km/godz. yzakres pomiarowy chwilowego zużycia paliwa: 0 99,9 l/100 km. yzakres pomiarowy średniego zużycia paliwa: 0 25,5 l/100 km. yzakres pomiarowy paliwa dostępnego w baku: 0 99,9 l. yzakres pomiarowy przejechanej odległości: km. yzakres pomiarowy dystansu do przejechania na dostępnym paliwie: km. yzakresy regulacji parametrów konfiguracyjnych: Stałe wtryskiwaczy: ml/min. Stała przetwornika drogi: 1 99 impulsów/obrót. Obwód opony: cm. Liczba cylindrów: 2 8. Pojemności baków: l. yprzesunięcie belek informacyjnych: 0 9 pikseli. Projekty pokrewne na FTP: (wymienione artykuły są w całości dostępne na FTP) AVT-5545 Komputer samochodowy Mee MK II (2.0) (EP 7-8-9/2016) AVT-5495 Uniwersalny komputer samochodowy Mee (EP 3/2015) AVT-3095 Komputer samochodowy (EdW 4-5/2014) AVT-5405 TripCo komputer samochodowy (EP 7/2013) AVT-5395 TIDex komputer dla samochodów z silnikiem Diesla (EP 5/2013) AVT-5397 Komputer pokładowy z funkcją tempomatu (EP 5/2013) AVT-1664 Transceiver CAN (EP 2/2012) AVT-5280 Urządzenie diagnostyczne do sieci CAN (EP 3/2011) AVT-5271 VAGlogger Przyrząd diagnostyczny dla samochodów z grupy VW Audi (EP 1/2011) AVT-5160 Climatic sterownik klimatyzacji samochodowej (EP 12/2008) AVT-286 Komputerek pokładowy do samochodu (EP 5-6/1996) * Uwaga: Zestawy AVT mogą występować w następujących wersjach: AVT xxxx UK to zaprogramowany układ. Tylko i wyłącznie. Bez elementów dodatkowych. AVT xxxx A płytka drukowana PCB (lub płytki drukowane, jeśli w opisie wyraźnie zaznaczono), bez elementów dodatkowych. AVT xxxx A+ płytka drukowana i zaprogramowany układ (czyli połączenie wersji A i wersji UK) bez elementów dodatkowych. AVT xxxx B płytka drukowana (lub płytki) oraz komplet elementów wymieniony w załączniku pdf AVT xxxx C to nic innego jak zmontowany zestaw B, czyli elementy wlutowane w PCB. Należy mieć na uwadze, że o ile nie zaznaczono wyraźnie w opisie, zestaw ten nie ma obudowy ani elementów dodatkowych, które nie zostały wymienione w załączniku pdf AVT xxxx CD oprogramowanie (nieczęsto spotykana wersja, lecz jeśli występuje, to niezbędne oprogramowanie można ściągnąć, klikając w link umieszczony w opisie kitu) Nie każdy zestaw AVT występuje we wszystkich wersjach! Każda wersja ma załączony ten sam plik pdf! Podczas składania zamówienia upewnij się, którą wersję zamawiasz! (UK, A, A+, B lub C). ELEKTRONIKA PRAKTYCZNA 12/
3 Astra G/Corsa C Astra F/Corsa B Rysunek 1. Rozmieszczenie wyprowadzeń dwóch złącz wyświetlacza TID stosowanych w najbardziej popularnych modelach Opla i cyfry, wyświetlacz alfanumeryczny), które były dostępne dla radioodbiornika plus dodatkowe piktogramy obrazujące tryb pracy radia. Nowsze pracują w organizacji 1 10 znaków (plus piktogramy, pełne ASCII, wyświetlacz mozaikowy 5 7 pikseli) w dolnym wierszu, zaś górny wiersz zarezerwowano dla wbudowanego systemu mikroprocesorowego (zegar, termometr). Dodatkowo, przewidziano możliwość synchronizacji wbudowanego weń zegara czasu rzeczywistego sygnałem RDS radioodbiornika. Niestety, od roku 2005/2006 firma Opel zdecydowała się (wzorem innych producentów w branży motoryzacyjnej) na zastosowanie magistrali CAN we wszystkich nowych pojazdach osobowych, co pociągnęło potrzebę implementacji tego interfejsu także w wyświetlaczu LCD. Niemniej jednak, w zdecydowanej większości popularnych modeli pojazdów tej marki znajdziemy wyświetlacze, które z powodzeniem mogą być zastąpione przez opisywane urządzenie. Oczywiście, w zależności od typu pojazdu i rodzaju zastosowanego wyświetlacza, stosowano różne złącza. Na rysunku 1 zamieszczono rozkład wyprowadzeń dwóch złącz wyświetlacza TID stosowanych w najbardziej popularnych modelach Opla, tj. Astra F/G i Corsa B/C. W tabeli 2 umieszczono opis wyprowadzeń tych złącz. Paleta stosowanych złącz jest znacznie szersza, w związku z czym zainteresowanych czytelników odsyłam na bardzo ciekawą stronę poświęconą tematyce car-audio, znajdującą się pod adresem NaAfwS. Wyświetlacz jest systemem mikroprocesorowym wyposażonym w funkcje dodatkowe (oprócz możliwości wyświetlania danych z magistrali), takie jak: wbudowany kalendarz, zegar czy też termometr. Kolejnym ciekawym zagadnieniem jest rodzaj magistrali sterującej Tabela 2. Opis wyprowadzeń dwóch złącz wyświetlacza TID stosowanych w najbardziej popularnych modelach Opla Astra G/Corsa C Nr pinu Funkcja/Opis 1 Zasilanie: 12V po przekręceniu kluczyka stacyjki 2 AA 12V po włączeniu radioodbiornika 3 Zasilanie: 12V z akumulatora 4 Regulacja jasności podświetlenia wyświetlacza (sygnał PWM) 5 NTC wyprowadzenie do podłączenia czujnika temperatury zewnętrznej 6 Masa 7 NTC wyprowadzenie do podłączenia czujnika temperatury zewnętrznej 8 Wyprowadzenie testowe do sprzętu diagnostycznego 9 WEG sygnał prędkości pojazdu (korekta wskazań termometru) 10 SCL - sygnał sterujący magistrali Serial Clock 11 SDA - sygnał sterujący magistrali Serial Data 12 MRQ - sygnał sterujący magistrali Master Request Astra F/Corsa B/Tigra Nr pinu Funkcja/Opis 1 Zasilanie: 12V z akumulatora 2 NTC wyprowadzenie do podłączenia czujnika temperatury zewnętrznej 3 Masa 4 NTC wyprowadzenie do podłączenia czujnika temperatury zewnętrznej 5 Zasilanie: 12V po przekręceniu kluczyka stacyjki 6 Oświetlenie 7 Regulacja jasności podświetlenia wyświetlacza (sygnał PWM) 8 AA 12V po włączeniu radioodbiornika 9 SCL - sygnał sterujący magistrali Serial Clock 10 MRQ - sygnał sterujący magistrali Master Request 11 SDA - sygnał sterujący magistrali Serial Data 12 WEG sygnał prędkości pojazdu (korekta wskazań termometru) Jest ona bardzo zbliżona funkcjonalnością do dobrze znanej magistrali I 2 C, lecz poszerzona o dodatkowy sygnał sterujący MRQ (Master Request). Na tę magistralę składają się 4 linie oznaczonych: AA, MRQ, SDA i SCL, przy czym wyłącznie trzy ostatnie realizują rzeczywistą transmisję danych, zaś linia AA sygnalizuje zdarzenie załączenia/wyłączenia radioodbiornika przygotowując tym samym wbudowany wyświetlacz do odbierania danych. Po wyłączeniu radioodbiornika napięcie na tej linii wynosi 0 V, zaś po jego załączeniu 12 V. Linia MRQ jest używana przez układ master (radioodbiornik) do sprawdzenia obecności układu slave (wyświetlacza TID) na magistrali danych oraz do rozróżnienia rodzaju przesyłanych danych, o czym później. Zanim jednak radioodbiornik rozpocznie jakąkolwiek transmisję danych sprawdza, tuż po włączeniu jego zasilania, stan wszystkich linii transmisyjnych wykonując tzw. Power On Test, dla którego przebiegi sygnałów sterujących pokazano na rysunku 2, a którego celem jest sprawdzenie ciągłości wszystkich linii danych jak i wykluczenie potencjalnych zwarć. Tuż po włączeniu zasilania radioodbiornika, któremu to towarzyszy zmiana poziomu napięcia występującego na linii AA z 0 V na 12 V, następuje po czasie T1 ( ms) ściągnięcie wszystkich linii danych (MRQ, SDA i SCL) do masy na czas T2 ( ms), następnie zwolnienie ich (także na czas T2) oraz naprzemienne ściągnięcie do masy kolejnych linii SDA, SCL i na końcu MRQ. Taka sekwencja zdarzeń pozwala, co napisano wcześniej, na zbadanie stanu wszystkich linii sterujących i zakończenie transmisji w przypadku wykrycia potencjalnych problemów. Jeśli powyższa procedura zakończy się powodzeniem (brak zwarć i nieciągłości linii danych), master przechodzi do właściwej transmisji danych, dla której to przebiegi sygnałów sterujących pokazano na rysunku ELEKTRONIKA PRAKTYCZNA 12/2016




4 multitid wielofunkcyjny, samochodowy komputer pokładowy Po czasie T3 (1 2 ms) od ostatniego zwolnienia linii MRQ będącego jednocześnie końcowym elementem procedury Power On Test, układ Master ponownie zeruje linię MRQ, tym razem jednak z zupełnie innego powodu. Po pierwsze, sygnalizuje w ten sposób zamiar transmisji danych, a po drugie, sprawdza obecność slave na magistrali danych oraz jego gotowość na odbieranie pakietu danych, gdyż działanie takie podejmowane jest każdorazowo na początku każdej transmisji z radioodbiornika do wyświetlacza TID. Po wymuszeniu poziomu niskiego na linii MRQ, slave musi w czasie T4 (100 ms 15 ms) zewrzeć linię SDA do masy sygnalizując w ten sposób swoją obecność, jak i gotowość do odbierania danych. Jeśli tego nie zrobi, master powinien zakończyć w tym miejscu bieżącą transmisję danych. Dalej, wyzerowaniu linii SDA przez slave, master zwalnia linię MRQ (zostaje ona ustawiona), co powinno skutkować zwolnieniem linii danych SDA przez slave po czasie T5 ( ms). Na tym etapie rozpoczyna się właściwa transmisja danych zgodna ze specyfikacją standardu I 2 C, z jednym, drobnym, acz istotnym wyjątkiem, o którym mowa będzie w dalszej części artykułu. Wygląd kompletnej ramki danych pokazano na rysunku 4. Transmisja rozpoczyna się od wygenerowania sekwencji Start przez master a, po czym jako pierwszy bajt transmitowany jest adres slave o wartości 0x4D (0x9B w notacji Rysunek 2. Przebiegi sygnałów sterujących magistrali danych w trakcie sekwencji Power On Test Rysunek 3. Przebiegi sygnałów sterujących magistrali danych po wykonaniu sekwencji Power On Test 8-bitowej z ustawionym bitem R/W). Właśnie w tym miejscu jest widoczna subtelna różnica pomiędzy standardowym interfejsem zgodnym ze standardem I 2 C, a rozwiązaniem zastosowanym przez inżynierów Opla. Skoro transmitowany bajt adresu ma ustawiony najmniej znaczący bit będący jednocześnie bitem R/W (odczyt/zapis) w standardzie I 2 C powinno to oznaczać, że master (radioodbiornik) zgłasza chęć odczytania danych ze slave (wyświetlacza TID) i kolejne dane, które zostaną przesłane będą danymi przesyłanymi ze slave do master, a jest zgoła inaczej, ponieważ master kontynuuje w tym miejscu transmisję danych do slave, tak jakby najstarszy bit przesłanego wcześniej adresu był wyzerowany. Z czego wynika ta drobna, acz znacząca różnica? Odpowiedź jest prosta. Z chęci maksymalnego zabezpieczenia się przed możliwością wystąpienia zaburzeń transmisji i będących tego następstwem, niepoprawnych danych, o co, jak łatwo się domyślić, nietrudno w tak niesprzyjającym środowisku, jak instalacja samochodowa. Otóż, zgodnie z pomysłem inżynierów Opla, każdy bajt danych składa się z 7 bitów właściwych danych oraz bitu kontroli parzystości umieszczonego na pozycji najmniej znaczącej. I niestety, dotyczy to wszystkich bajtów danych, w tym adresu urządzenia, co powoduje, że dla adresu 0x4D (w notacji 7-bitowej) otrzymujemy bit kontroli parzystości o wartości 1, czyli ustawiony bit R/W. Różnica jest drobna, lecz niesie za sobą poważne konsekwencje implementacyjne. Otóż, w przypadku takiej konstrukcji ramki danych, do obsługi transmisji danych nie możemy użyć wygodnego, sprzętowego interfejsu TWI (odpowiednik I 2 C) REKLAMA Rysunek 4. Kompletna ramka danych
, po czym najzwyczajniej w świecie")
5 mikrokontrolera ATmega644PA, którego zastosowanie znacznie uprościłoby mechanizmy emulujące wyświetlacz TID. Zwyczajnie, i co oczywiste, sprzęg TWI nie przewiduje sytuacji, w której to master wysyła żądanie odczytu do slave (wysyła jego adres z ustawionym bitem R/W), po czym najzwyczajniej w świecie kontynuuje transmisję danych w kierunku do slave. Takiego scenariusza transmisji w module TWI (i stosownych statusów jego stanu w rejestrze TWSR mikrokontrolera) po prostu nie przewidziano, gdyż jest on zgodny ze standardem I 2 C. Czy to stanowi jakiś problem? W zasadzie nie, lecz z pewnością skomplikuje mechanizm obsługi interfejsu Opla, gdyż do obsługi transmisji I 2 C będziemy musieli zaprzęgnąć inne zasoby sprzętowe mikrokontrolera, w tym przypadku przerwania zewnętrzne oraz zaimplementować niezbędne procedury programowe, co na pewno przyczyni się do większego obciążenia rdzenia. W tym miejscu należy wspomnieć o jeszcze jednej funkcji linii MRQ, którą można zaobserwować analizując przebiegi kompletnej ramki danych z rys. 4. Otóż, linia danych MRQ jest wyzerowana w trakcie przesyłania przez radioodbiornik wszystkich bajtów danych za wyjątkiem bajta adresu, co w prosty sposób odróżnia ten bajt od pozostałych bajtów danych. Takie rozwiązanie stanowi zapewne kolejny element poprawy integralności przesyłanej ramki danych przyczyniający się do zwiększenia marginesu bezpieczeństwa, bo identyfikacja bajta adresu mogłaby być wykonana przecież w prostszy sposób, choćby przez fakt, że jest to zawsze pierwszy, przesyłany bajt danych. Niemniej jednak, rozwiązanie Opla z pewnością należy uznać za bardzo przemyślane. Transmisję właściwych danych, jak to zwykle ma miejsce w standardzie I 2 C, kończy sygnał stop wygenerowany przez master. Jak do tej pory nie powiedziałem nic na temat samych danych, które to radioodbiornik wysyła do wyświetlacza pokładowego TID. Dane te to 13 bajtów, z których pierwsze trzy bajty odpowiadają za wyświetlanie piktogramów pokazywanych na ekranie wyświetlacza TID, zaś kolejne 10 bajtów to kody znaków ASCII przeznaczonych do wyświetlenia w polu tekstowym, przy czym Rysunek 5. Wygląd ramki danych wyświetlacza TID w wypadku nieobsługiwanego adresu I 2 C Tabela 3. Znaczenie poszczególnych bitów trzech pierwszych bajtów danych wyświetlacza TID Bajt 1 (status radia) obsługiwanych jest kilka znaków specjalnych o kodach poniżej wartości 32 (spacji). W tabeli 3 opisano znaczenie poszczególnych bitów trzech pierwszych bajtów danych odpowiedzialnych za wyświetlanie specjalnych piktogramów na ekranie wyświetlacza TID. W tabeli 4 umieszczono kody ASCII i opis znaków specjalnych wyświetlanych przez oryginalny wyświetlacz TID a obsługiwane przez sterownik multitid. Wcześniejszy opis dotyczy wyświetlaczy o organizacji 10-znakowej. Dla starszych wyświetlaczy, o organizacji 8-znakowej, jest przesyłanych wyłącznie 10 bajtów danych, z czego 2 pierwsze bajty odpowiadają za wyświetlanie piktogramów pokazywanych na ekranie wyświetlacza TID (tylko status radia i magnetofonu), zaś kolejne 8 bajtów to kody znaków ASCII przeznaczonych do wyświetlenia w polu tekstowym wyświetlacza (tylko wielkie litery i cyfry, bez znaków specjalnych). Inny jest też adres samego wyświetlacza, który przyjmuje wtedy wartość 0x4A. Już tylko dla porządku dodam, że każdy bajt danych przesłany przez master do slave jest potwierdzany przez układ podrzędny (TID) poprzez wygenerowanie sygnału ACK (wyzerowanie Bajt 2 (status magnetofonu) Bajt 3 (status CD) Bit 7 przecinek CD-In 0 Bit 6 RDS Dolby C Symbol Track Bit 5 TP Dolby B RDM Bit 4 Symbol Stereo Cr PGM Bit 3 0 CPS DISC Bit 2 AS 0 0 Bit 1 Nawias kwadratowy dla TP 0 0 Bit 0 Bit parzystości Bit parzystości Bit parzystości Tabela 4. Kody ASCII znaków specjalnych wyświetlanych przez oryginalny, 10-znakowy wyświetlacz TID Kod Znak ASCII 1 Pomniejszona cyfra 1 2 Pomniejszona cyfra 2 3 Pomniejszona cyfra 3 4 Pomniejszona cyfra 4 5 Pomniejszona cyfra 5 6 Pomniejszona cyfra 6 8 Pomniejszona, wielka litera A 9 Pomniejszona, wielka litera F 10 Pomniejszona, wielka litera U 11 Pomniejszona, wielka litera M 12 Pomniejszona, wielka litera L 13 Pomniejszona, wielka litera P 14 Symbol nutki linii SDA) w dziewiątym takcie zegara magistrali (SCL) i to niezależnie czy przesyłane dane dotyczą naszego urządzenia (przesłano wcześniej zgodny adres I 2 C), czy też nie, co również wymyka się standardom wyznaczonym przez specyfikację interfejsu I 2 C. Sytuację taką przedstawiono na rysunku 5, który to prezentuje przebiegi na magistrali danych zarejestrowane podczas współpracy radioodbiornika CAR ELEKTRONIKA PRAKTYCZNA 12/2016

6 multitid wielofunkcyjny, samochodowy komputer pokładowy Listing 1. Treść pliku nagłówkowego emulatora wyświetlacza TID //Zmienne globalne modułu TIDemulator extern volatile uint8_t TIDdataReady; //Flaga gotowości danych extern volatile uint8_t TIDdata[14]; //Dane (element 0 to adres I2C) //Prototypy funkcji void inittidemulator(uint8_t TID_type); //Definicje portów TID a #define I2C_SDA_DDR DDRC #define I2C_SDA_PIN PINC #define I2C_SDA_NR PC1 //ISR: PCINT17 #define I2C_SCL_PIN PINB #define I2C_SCL_NR PB2 //ISR: INT2 #define MRQ_PIN PIND #define MRQ_NR PD3 //ISR: INT1 #define AA_PIN PIND #define AA_NR PD2 //ISR: INT0 //Adres wyświetlacza TID #define TID_TYPE_8DIGITS 0x4A #define TID_TYPE_10DIGITS 0x4D #define TID_TIMESTAMP 0x47 //Stany pracy interfejsu TID #define RADIO_IS_OFF 0x00 #define WAITING_FOR_FIRST_MRQ 0x01 #define FIRST_MRQ_STARTED 0x02 #define WAITING_FOR_SECOND_MRQ 0x03 #define SECOND_MRQ_STARTED 0x04 #define WAITING_FOR_MRQ_BEFORE_TRANSMISSION 0x05 #define START_DETECTED 0x06 //Definicje czasów dla Preskalera Timera1 = 256 i fosc = MHz [w taktach timera] #define TIME_TOLERANCE 14 //300us #define T2_MIN (24 - TIME_TOLERANCE) //500us - TIME_TOLERANCE #define T2_MAX (48 + TIME_TOLERANCE) //1000us + TIME_TOLERANCE //Średnie wartości pozostałych czasów [us] #define T4_MID 120 //120us #define T5_MID 120 //120us //Makra dla portów #define SDA_SET I2C_SDA_DDR &= ~(1<<I2C_SDA_NR) //Ustawiamy, jako wejście podciągnięte przez zewnętrzny rezystor #define SDA_RESET I2C_SDA_DDR = (1<<I2C_SDA_NR) //Ustawiamy, jako wyjście z domyślnym stanem 0 #define SDA_READ ((I2C_SDA_PIN & (1<<I2C_SDA_NR))>>I2C_SDA_NR) //Wartość: 0x00 lub 0x01 #define SDA_IS_RESET (!(I2C_SDA_PIN & (1<<I2C_SDA_NR))) #define SDA_IS_SET (I2C_SDA_PIN & (1<<I2C_SDA_NR)) #define SCL_IS_RESET (!(I2C_SCL_PIN & (1<<I2C_SCL_NR))) #define SCL_IS_SET (I2C_SCL_PIN & (1<<I2C_SCL_NR)) #define MRQ_IS_RESET (!(MRQ_PIN & (1<<MRQ_NR))) #define MRQ_IS_SET (MRQ_PIN & (1<<MRQ_NR)) #define AA_IS_SET (AA_PIN & (1<<AA_NR)) //Makra dla przerwań #define SDA_INTR_INIT_ON_BOTH_EDGES PCMSK2 = (1<<PCINT17) //Zmiana stanu na PCINT17 (sygnał SDA) generuje przerwanie #define SDA_INTR_ENABLE PCICR = (1<<PCIE2) //Zezwolenie na przerwanie PCINT2 (PCINT23..16) #define SDA_INTR_DISABLE PCICR &= ~(1<<PCIE2) //Zablokowanie przerwania PCINT2 (PCINT23..16) #define SDA_INTR_CLEAR_FLAG PCIFR = (1<<PCIF2) //Skasowanie flagi przerwania PCINT2 (PCINT23..16) #define SDA_INTR_NAME PCINT2_vect //Nazwa wektora przerwania PCINT2 (SDA) #define SCL_INTR_INIT_ON_RISING_EDGE EICRA = (1<<ISC21) (1<<ISC20) //Rosnące zbocze sygnału na INT2 (sygnał SCL) generuje przerwanie #define SCL_INTR_ENABLE EIMSK = (1<<INT2) //Zezwolenie na przerwanie INT2 #define SCL_INTR_DISABLE EIMSK &= ~(1<<INT2) //Zablokowanie przerwania INT2 #define SCL_INTR_CLEAR_FLAG EIFR = (1<<INTF2) //Skasowanie flagi przerwania INT2 #define SCL_INTR_NAME INT2_vect //Nazwa wektora przerwania INT2 (SCL) #define MRQ_INTR_INIT_ON_BOTH_EDGES EICRA = (1<<ISC10) //Dowolne zbocze sygnału na INT1 (sygnał MRQ) generuje przerwanie #define MRQ_INTR_ENABLE EIMSK = (1<<INT1) //Zezwolenie na przerwanie INT1 #define MRQ_INTR_DISABLE EIMSK &= ~(1<<INT1) //Zablokowanie przerwania INT1 #define MRQ_INTR_CLEAR_FLAG EIFR = (1<<INTF1) //Skasowanie flagi przerwania INT1 #define MRQ_INTR_NAME INT1_vect //Nazwa wektora przerwania INT1 (MRQ) #define AA_INTR_INIT_ON_BOTH_EDGES EICRA = (1<<ISC00) //Dowolne zbocze sygnału na INT0 (sygnał AA) generuje przerwanie #define AA_INTR_ENABLE EIMSK = (1<<INT0) //Zezwolenie na przerwanie INT0 #define AA_INTR_DISABLE EIMSK &= ~(1<<INT0) //Zablokowanie przerwania INT0 #define AA_INTR_CLEAR_FLAG EIFR = (1<<INTF0) //Skasowanie flagi przerwania INT0 #define AA_INTR_NAME INT0_vect //Nazwa wektora przerwania INT0 (AA) z nowym, 10-znakowym wyświetlaczem pokładowym TID. Uważny Czytelnik zastanowi się z pewnością, w jakim celu pokładowy wyświetlacz TID miałby potwierdzać każdy bajt danych, które nie są do niego adresowane, to znaczy nie zostały okraszone stosownym adresem układu podrzędnego (w naszym przypadku 0x4D). To kolejny przykład przemyślanej konstrukcji Opla. Otóż wiele fabrycznych radioodbiorników może pracować tak w starszych, jak i nowszych modelach pojazdów tego producenta, które to mogą być wyposażone w różne rodzaje wyświetlaczy TID. Aby umożliwić współpracę radioodbiornika z nowymi i starszymi typami wyświetlaczy, które to przecież charakteryzują się inną organizacją ekranu i odrębnym adresem w przestrzeni I 2 C, wprowadzono zasadę, iż radioodbiornik wysyła pakiety danych dla starego i nowego typu wyświetlaczy, co oczywiste, stosownie je modyfikując. W związku z tym, każdy przesyłany komunikat transmitowany jest w dwóch wersjach, dla starego i nowego typu wyświetlacza, stąd różne adresy i różna liczba towarzyszących im danych na jednej i tej samej magistrali. Nie tłumaczy to oczywiście faktu potwierdzania (sygnałem ACK) przez wyświetlacz TID nie swojego adresu I 2 C, jak i danych nie dla niego przeznaczonych, lecz myślę, że wynika to z potrzeby ciągłego informowania (przy użyciu sygnału ACK) radioodbiornika o nasłuchu magistrali I 2 C przez układ podrzędny. Jak widać, zastosowana przez Opla magistrala, na pozór bardzo podobna do rozwiązania Philips a (I 2 C), ma wiele drobnych, acz znaczących różnic, przez które trudno byłoby ją obsłużyć korzystając ze sprzętowego sprzęgu TWI. Na koniec prawdziwa wisienka na torcie. Jak wiadomo, oryginalny wyświetlacz TID wyposażono w zegar czasu rzeczywistego, którego wskazania są wyświetlane w pierwszej linii ekranu (obok REKLAMA
7 temperatury zewnętrznej). W związku z tym producent modułu wyświetlacza przewidział możliwość synchronizacji wskazań tego zegara sygnałem czasu nadawanym przez stacje radiowe, a zawartym w treści wybranych komunikatów RDS. W jaki sposób wyświetlacz TID synchronizuje swój zegar RTC sygnałem czasu radioodbiornika? Wprowadzono dodatkowy adres I 2 C wyświetlacza TID, dla którego przesyłane dane są interpretowane przez ten moduł jako dane bieżącego czasu sygnału RDS. Adres ten to 0x47 (0x8F przy ustawionym bicie R/W), natomiast odpowiednia ramka danych składa się z 7 bajtów o następującej organizacji: X-M-G-D-X-X-X, gdzie: M to minuty, G to godziny, D to dzień miesiąca. Bajty X nie zostały przeze mnie jednoznacznie zidentyfikowane, choć z całą pewnością ich obecność nie jest przypadkowa. Jeśli bajty te przechowują bieżący miesiąc i rok, jak się zapewne domyślacie, czas oczekiwania na potwierdzenie tej tezy byłby dość długi. Wygląd ramki danych znacznika czasu wyświetlacza TID zarejestrowanej 17/08/2016 o godzinie 17:49 przedstawiono na rysunku 6. Jak poprzednio, bit najmniej znaczący jest bitem kontroli parzystości, w związku z czym cały bajt należy przesunąć w prawo o jedno miejsce). To tyle, jeśli chodzi o opis modułu wyświetlacza pokładowego. Przejdźmy zatem do szczegółów implementacyjnych. Jako, że nasze urządzenie multitid realizuje szereg dość skomplikowanych funkcjonalności, które wymagają ścisłych zależności czasowych i zaangażowania wielu peryferiów mikrokontrolera, obsługa emulacji wyświetlacza TID (czyli obsługa radioodbiornika) została zrealizowana z wykorzystaniem 4 zewnętrznych przerwań systemowych. Taka mnogość wykorzystywanych przerwań wynika z faktu obsługi aż 4 sygnałów sterujących (AA, MRQ, SCL, SDA) przy braku możliwości realizacji sprzętowej obsługi magistrali I 2 C. W tabeli 5 pokazano zestawienie wykorzystywanych, zewnętrznych Listing 2. Funkcja ISR odpowiedzialna za obsługę sygnału AA interfejsu danych wyświetlacza TID //Przerwanie odpowiedzialne za obsługę sygnału AA - wyzwalane po każdym zboczu sygnału na AA ISR(AA_INTR_NAME) if(aa_is_set) //Włączenie radioodbiornika Status = WAITING_FOR_FIRST_MRQ; MRQ_INTR_INIT_ON_BOTH_EDGES; //Konfiguracja i włączenie przerwania dla MRQ MRQ_INTR_CLEAR_FLAG; MRQ_INTR_ENABLE; else //Wyłączenie radioodbiornika Status = RADIO_IS_OFF; //Startowy stan algorytmu SDA_SET; //Zwolnienie SDA, gdyby było ściągane przez Slave a MRQ_INTR_DISABLE; SDA_INTR_DISABLE; SCL_INTR_DISABLE; Listing 3. Funkcja ISR odpowiedzialna za obsługę sygnału MRQ interfejsu danych wyświetlacza TID //Przerwanie odpowiedzialne za obsługę sygnału MRQ - wyzwalane po każdym zboczu sygnału na MRQ ISR(MRQ_INTR_NAME) register uint16_t pulselength; static uint16_t lasttimer1; switch(status) case WAITING_FOR_FIRST_MRQ: if(sda_is_reset && SCL_IS_RESET && MRQ_IS_RESET) Status = FIRST_MRQ_STARTED; lasttimer1 = TCNT1; else Status = WAITING_FOR_FIRST_MRQ; break; case FIRST_MRQ_STARTED: pulselength = TCNT1 - lasttimer1; if(sda_is_set && SCL_IS_SET && MRQ_IS_SET && pulselength>t2_min && pulselength<t2_max) Status = WAITING_FOR_SECOND_MRQ; else Status = WAITING_FOR_FIRST_MRQ; break; case WAITING_FOR_SECOND_MRQ: if(sda_is_set && SCL_IS_SET && MRQ_IS_RESET) Status = SECOND_MRQ_STARTED; lasttimer1 = TCNT1; else Status = WAITING_FOR_FIRST_MRQ; break; case SECOND_MRQ_STARTED: pulselength = TCNT1 - lasttimer1; if(sda_is_set && SCL_IS_SET && MRQ_IS_SET && pulselength>t2_min && pulselength<t2_max) Status = WAITING_FOR_MRQ_BEFORE_TRANS- MISSION; else Status = WAITING_FOR_FIRST_MRQ; break; case WAITING_FOR_MRQ_BEFORE_TRANSMISSION: if(sda_is_set && SCL_IS_SET && MRQ_IS_RESET) //Sekwencja Slave a: ściągnięcie SDA do 0 po czasie T4 _delay_us(t4_mid); SDA_RESET; //Czekamy, aż Master zwolni MRQ (MRQ = 1) while(mrq_is_reset); //Sekwencja Slave a: zwolnienie SDA po czasie T5 _delay_us(t5_mid); SDA_SET; //Czekamy na sekwencję START while(sda_is_set); //Czekamy, aż Master ściągnie SCL do 0, //czyli przygotuje się do wysłania bitu while(scl_is_set); Status = START_DETECTED; //Konfiguracja i włączenie przerwania SCL dla //odbioru danych (poszczególnych bitów) SCL_INTR_INIT_ON_RISING_EDGE; SCL_INTR_CLEAR_FLAG; SCL_INTR_ENABLE; //Konfiguracja i włączenie przerwania SDA dla //wykrycia późniejszej sekwencji STOP SDA_INTR_INIT_ON_RISING_EDGE; SDA_INTR_CLEAR_FLAG; SDA_INTR_ENABLE; //Wyczyszczenie flagi MRQ MRQ_INTR_CLEAR_FLAG; else Status = WAITING_FOR_FIRST_MRQ; break; 26 ELEKTRONIKA PRAKTYCZNA 12/2016

8 multitid wielofunkcyjny, samochodowy komputer pokładowy Tabela 5. Lista zewnętrznych przerwań systemowych wraz z opisem ich konfiguracji i funkcjonalności niezbędnych dla obsługi magistrali radioodbiornika Opla Nazwa Sposób konfiguracji Funkcjonalność przerwania INT0 INT1 INT2 PCINT2 Wyzwalane przy każdym zboczu sygnału na wejściu AA Wyzwalane przy każdym zboczu sygnału na wejściu MRQ Wyzwalane przy narastającym zboczu sygnału na wejściu SCL Wyzwalane zmianą stanu na wejściu SDA Rysunek 6. Wygląd ramki danych znacznika czasu wyświetlacza TID Wykorzystywane do obsługi sygnału AA w zakresie detekcji włączenia/wyłączenia radioodbiornika Wykorzystywane do obsługi sygnału MRQ w zakresie kontroli procesu odbioru ramki danych Wykorzystywane do obsługi sygnału SCL w zakresie odczytu bitów danych Wykorzystywane do obsługi sygnału SDA w zakresie wykrywania sekwencji Stop Listing 4. Funkcja ISR odpowiedzialna za obsługę sygnału SDA interfejsu danych wyświetlacza TID //Przerwanie odpowiedzialne za obsługę sygnału SDA - wyzwalane po każdej zmianie stanu na SDA ISR(SDA_INTR_NAME) if(scl_is_set) if(sda_is_set) //Odebrano sekwencję STOP //Wyłączamy przerwania SDA i oczekujemy na nową sekwencję MRQ //(przed pakietem danych) Status = WAITING_FOR_MRQ_BEFORE_TRANSMISSION; SDA_INTR_DISABLE; //Zerujemy zmienną, bo sygnał STOP mógłby wystąpić przed końcem ramki byteindex = 0; Listing 5. Funkcja ISR odpowiedzialna za obsługę sygnału SCL interfejsu danych wyświetlacza TID //Przerwanie odpowiedzialne za obsługę sygnału SCL - wyzwalane przy rosnącym zboczu sygnału na SCL ISR(SCL_INTR_NAME) register uint8_t Bytes = (TIDtype == TID_TYPE_8DIGITS)? 11:14; static uint8_t bitindex, readvalue, TID[14]; readvalue = (readvalue<<1) SDA_READ; if(++bitindex == 8) //Odczytano 8 bitów bieżącego bajta danych TIDisr[byteIndex++] = readvalue; //Element nr 0 zawiera adres I2C TID a bitindex = readvalue = 0; //Generujemy ACK po każdych, odebranych 8 bitach danych while(scl_is_set); //Czekamy, aż Master ustawi SCL = 0 SDA_RESET; //sygnał ACK generowany przez Slave a while(scl_is_reset); //Czekamy, aż Master ustawi SCL, tj. odbierze ACK while(scl_is_set); //Czekamy, aż Master wyzeruje SCL, czyli przejdzie do następnego bitu SDA_SET; //Zwolnienie SDA przez Slave a SCL_INTR_CLEAR_FLAG; SDA_INTR_CLEAR_FLAG; //Sprawdzamy, czy mamy komplet bajtów by oczekiwać na sekwencję //STOP (niezależnie od rodzaju TID a) if((tid[0]>>1 == TID_TYPE_8DIGITS && byteindex == 11) (TID[0]>>1 == TID_TYPE_10DIGITS && byteindex == 14) (TID[0]>>1 == TID_TIMESTAMP && byteindex == 8)) if((tid[0]>>1) == TIDtype) //Sprawdzamy, czy to obsługiwany TID for(uint8_t i=0; i<bytes; ++i) TIDdata[i] = TID[i]; TIDdataReady = 1; byteindex = 0; //Wyłączamy przerwanie SCL i oczekujemy na sekwencję STOP SCL_INTR_DISABLE; przerwań systemowych, ich konfigurację oraz realizowaną funkcjonalność. W tym momencie posiadamy już niezbędną wiedzę w zakresie sposobu komunikacji radioodbiornika z oryginalnym wyświetlaczem pokładowym TID, w związku z czym pora na szczegóły implementacyjne mechanizmów pozwalających na emulację tego rodzaju wyświetlacza w zakresie interfejsu naszego komputera pokładowego. Zanim jednak przedstawię ciała funkcji zewnętrznych przerwań systemowych realizujących obsługę poszczególnych sygnałów magistrali danych muszę przedstawić plik nagłówkowy, który ułatwia napisanie wspomnianych funkcji a zarazem czyni je bardziej czytelnymi. Treść pliku nagłówkowego, o którym mowa pokazano na listingu 1. Napisano go w sposób dość uniwersalny, aby łatwo można było zmieniać wiele z predefiniowanych nazw i stałych, bez potrzeby edycji funkcji, które to korzystają z jego zawartości. Pora na przedstawienie funkcji obsługi zewnętrznych przerwań systemowych, które łącznie, odpowiedzialne są za obsługę interfejsu danych firmy Opel. Te funkcje pokazano na listingach od 2 do 5. Do kompletu brakuje funkcji inicjalizacyjnej, która ustawia parametry emulowanego wyświetlacza TID oraz aktywuje niezbędne, startowe funkcje ISR pokazano ją na listingu 6. Przejdźmy zatem do krótkiej analizy przedstawionych mechanizmów programowych. Można zauważyć, że funkcja obsługująca sygnał MRQ sprawdza zależności czasowe podczas sekwencji Power On Test i dopiero po ich pozytywnej weryfikacji pozwala na dalszą analizę sygnałów sterujących wykonywaną przez funkcje ISR, odpowiednio dla SDA i SCL. Oczywiście, sam start procesu obsługi magistrali wyświetlacza TID jest możliwy wyłącznie po załączeniu radioodbiornika, czemu towarzyszy wywołanie przerwania dla sygnału AA. Robert Wołgajew, EP Listing 6. Funkcja inicjalizacji modułu emulatora wyświetlacza TID inline void inittidemulator(uint8_t TID_ type) AA_INTR_INIT_ON_BOTH_EDGES; AA_INTR_CLEAR_FLAG; AA_INTR_ENABLE; TIDtype = TID_type; ELEKTRONIKA PRAKTYCZNA 12/
9 multitid wielofunkcyjny, samochodowy komputer pokładowy (2) Po lekturze pierwszej części artykułu wiemy już wszystko w zakresie obsługi wyświetlacza pokładowego oraz emulowania jego funkcjonalności, więc pora na zaprezentowanie szczegółów budowy komputera samochodowego multitid. Schemat ideowy komputera samochodowego multitid pokazano na rysunku 7. Został on zbudowany z zastosowaniem mikrokontrolera Atmega644-PA, zegara czasu rzeczywistego z podtrzymaniem zasilania MCP7940N-I/SN oraz wyświetlacza TFT pełniącego rolę graficznego interfejsu użytkownika. Mikrokontroler, jak to zwykle bywa, stanowi serce. Jest taktowany za pomocą rezonatora kwarcowego 12,288 MHz dla zapewnienia dużej dokładności pomiaru czasu oraz prędkości ładowania obrazków stanowiących elementy graficznego interfejsu użytkownika. Oczywiście, lepiej byłoby zastosować maksymalną, dostępną częstotliwość taktowania mikrokontrolera tj. 20 MHz, jednak przy napięciu zasilania 3,3 V jest to wartość progowa, dla której deklarowana jest poprawna praca mikrokontrolera. W celu realizacji założonej funkcjonalności urządzenia, w programie obsługi niniejszego sterownika, wykorzystano dwa sprzętowe układy czasowo-licznikowe znajdujące się na pokładzie mikrokontrolera oraz jedno przerwanie zewnętrzne. Sposób konfiguracji wspomnianych peryferiów oraz realizowaną przez nie funkcjonalność pokazano w tabeli 6. W aplikacji użyto także ostatniego dostępnego układu czasowo-licznikowego Timer2. Skonfigurowano go do pracy w trybie CTC, w którym generuje cykliczne przerwania (co 10 ms) wywołując obsługę klawiatury (przyciski MENU/<, OK/>). Dzięki zastosowaniu tego typu rozwiązania, program obsługi aplikacji urządzenia nie używa opóźnień, co zapewnia jego bezproblemową pracę oraz możliwość detekcji czasu naciśnięcia przycisku (krótki/długi/przytrzymanie itd.), dzięki czemu udało się poprawić ergonomię. Jak opisano w tab. 6, multitid dokonuje w czasie każdej sekundy pomiaru sumarycznej liczby impulsów doprowadzanych na wejście T0 mikrokontrolera z przetwornika drogi pojazdu oraz pomiaru sumarycznego czasu wtrysków, których to sygnał jest doprowadzony na wejście ICP1 licznika Timer1. W celu realizacji drugiej z funkcjonalności zaprojektowano dwa kompletne, bezpieczne układy wejściowe formujące sygnały wtryskiwaczy paliwa (oddzielnie dla Pb i LPG) dla potrzeb wejściowych obwodów mikrokontrolera. Wybór wtryskiwacza paliwa, z którego impulsy podawane są na wejście ICP mikrokontrolera, jest realizowany poprzez scalony przełącznik NC7SB3157 (U5), dla którego sygnałem sterującym jest poziom logiczny na wyjściu PD7 mikrokontrolera. Jest on zmieniany w procedurze obsługi przerwania PCINT1, które jest wywoływane zmianą poziomu na wyprowadzeniu PB6 na skutek załączenia zaworu na reduktorze instalacji LPG (czyli zmiany paliwa zasilającego silnik na LPG, w tym start wtryskiwaczy gazu). To rozwiązanie pozwala na efektywną realizację funkcji automatycznej detekcji rodzaju paliwa i reakcję po stronie programu obsługi. Na listingu 8 pokazano wzory zaczerpnięte bezpośrednio z programu obsługi aplikacji służące do obliczenia wszystkich parametrów rzeczywistych komputera pokładowego. Kilka słów komentarza wymaga mechanizm akumulowania przejechanej drogi i zużytego paliwa. Komputer multitid oblicza i wyświetla średnie wartości zużycia paliwa i prędkości, objętość paliwa pozostającego w baku pojazdu oraz pokonany dystans. Jak łatwo się domyślić, w celu wyznaczenia wspomnianych wartości jest niezbędna znajomość całkowitego zużycia paliwa i dystansu od momentu wyzerowania liczników, a co za tym idzie niezbędny staje się mechanizm akumulowania mierzonych wartości, niezależnie dla każdego rodzaju paliwa. Ustawienia Fuse-bitów: CKSEL3...0: 1111 SUT1...0: 11 CKDIV8: 1 CKOUT: 1 JTAGEN: 1 EESAVE: 1 BODLEVEL2:0: ELEKTRONIKA PRAKTYCZNA 1/2017
 C1, C2, C8, C9: 22 pf C4: 470 nf C3, C5, C10, C13, C14: 100 nf C6, C7, C11: 10 mf/16 V (SMD A ) C12: 1 mf Półprzewodniki: U1, U3 MCP1703-3302E/DB")
10 multitid wielofunkcyjny, samochodowy komputer pokładowy Wykaz elementów: Rezystory: (SMD 0805) R1, R3: 10 kv R2: 6,34 kv/1% R4, R5, R7, R9, R11, R12, R14 R16, R18: 3 kv R6, R10, R13, R19: 1 kv R8, R17: 8,2 kv R20, R21: 10 V Kondensatory: (SMD 0805) C1, C2, C8, C9: 22 pf C4: 470 nf C3, C5, C10, C13, C14: 100 nf C6, C7, C11: 10 mf/16 V (SMD A ) C12: 1 mf Półprzewodniki: U1, U3 MCP E/DB (obudowa SOT223) U2 MCP7940N-I/SN (obudowa SO08) U4 ATMEGA644PA (obudowa TQFP44) U5 NC7SB3157 (obudowa SC-70-6) U6, U7 LTV817S-SMD (obudowa SO04) T1, T2 BC817 (obudowa SOT23) D1, D2 1N4148 (obudowa MINIMELF) Inne: TFT wyświetlacz graficzny Multi-Inno Technology MI0420CT-5 (kontroler FT1509, taśma ZIF 45 pin) L1 dławik 10µH (obudowa SMD 0805) Q1 rezonator kwarcowy 12,288 MHz niski Q2 rezonator kwarcowy, zegarkowy Hz MENU/<, OK/> microswitch THT wysokość 6 mm LPG gniazdo IDC męskie typu P1303 (PIN3, raster 2,54mm) PB gniazdo IDC męskie typu P1302 (PIN2, raster 2,54mm) TID_CON gniazdo wyświetlacza Opel TID lub gniazdo IDC do druku (PIN 2 6, raster 2,54mm) Mikrokontroler Atmega644-PA ma nieulotną pamięć EEPROM, jednak zapewnia ona ograniczoną liczbę gwarantowanych cyklów zapisu. Dlatego posłużono się pamięcią RAM dostępną w układzie zegara czasu rzeczywistego MCP7940N, której zawartość jest podtrzymywana nawet po wyłączeniu zapłonu za pomocą baterii BAT. Dla wygody wszystkie dane obliczeniowe uformowano w strukturę zaopatrzoną w sumę kontrolną CRC8. Kolejne słowo komentarza należy się układowi odpowiedzialnemu za pomiar temperatury zewnętrznej. Samochody marki Opel mają rezystancyjny czujnik temperatury zewnętrznej montowany w okolicach przedniego zderzaka. Jest to termistor o ujemnym współczynniku temperaturowym (NTC), którego zaciski dostępne są w złączu wyświetlacza TID. Skoro tak, to sposób pomiaru temperatury nasuwa się sam. Dysponując przetwornikiem A/C wystarczy zastosować dzielnik rezystancyjny, którego jednym z elementów jest termistor w pojeździe, a drugim dokładny rezystor o odpowiedniej rezystancji. Dzielnik rezystancyjny, o którym mowa zbudowano z termistora dostępnego na zaciskach NTC/NTC wyświetlacza TID oraz rezystora R2. Wszystkie wejścia PORTA mikrokontrolera, do których w wewnętrznej strukturze układu są dołączone wejścia przetwornika A/C użyto do sterowania pracą wyświetlacza TFT. Jak w takiej sytuacji zmierzyć napięcie występujące na termistorze? Zastosowano tu pewną sztuczkę. Napięciem wejściowym (mierzonym) przetwornika A/C jest specjalne, wysokostabilne, wewnętrzne źródło napięcia odniesienia VBG (bandgap), a napięcie z dzielnika NTC/R2 jest napięciem referencyjnym przetwornika A/C. W ten sposób odwrócimy normalny sposób pomiaru napięcia przez przetwornik A/C. Nie mając de facto do dyspozycji żadnego z wejściowych portów mikrokontrolera, do których dołączono wejścia przetwornika A/C, możemy dokonywać pomiaru napięcia korzystając głównie z faktu, iż przetwornik może mierzyć napięcie VBG. Napięcie wyjściowe dzielnika NTC/ R2 będące zarazem napięciem referencyjnym (odniesienia) przetwornika A/C wyraża się wzorem U_WY=U_REF=R_NTC/ (R_NTC+R_2) 3,3 V. Z kolei, wartość zmierzona przez przetwornik A/C wyraża się wzorem ADC=(U_IN 1024)/U_REF, gdzie U_IN=VBG=1,1 V. Za pomocą obu wzorów otrzymujemy wyrażenie pozwalające wyznaczyć wartość mierzoną przez przetwornik A/C ADC=(1, (R_NTC+R_2))/ (3,3 R_NTC). Tego sposobu możemy użyć prawie zawsze, gdy brakuje wejść, aby skorzystać z wbudowanego przetwornika A/C. By obliczyć wartość temperatury zewnętrznej, program obsługi aplikacji korzysta z predefiniowanej i zapisanej w pamięci Flash tablicy stałych odwzorowujących charakterystykę zastosowanego termistora NTC. Już zupełnie na koniec dodam, iż zdecydowaną większość pamięci programu aplikacji zajęły wzorce obrazków wyświetlanych w ramach graficznego interfejsu użytkownika (niektóre z nich, mimo kompresji, zajmują po 5 kb) oraz wzorce czcionek. Robert Wołgajew, EP Listing 8. Wzory używane do obliczania wyświetlanych parametrów na ekranie // //Obliczamy spalone w czasie ostatniej sekundy paliwo [ul] - jeśli tylko nie jesteśmy w trybie kalibracji if(config.calibration[fuel] == 0) spentfuelper1s = ((1UL*Config.Cylinders*injectionTime*Config.CcPerMin[Fuel])/2880UL); else spentfuelper1s = 0; //Akumulujemy wartości zużytego paliwa [ul] oraz przejechanego dystansu [m] niezbędne do obliczenia wartości średnich Accu. spentfuel [Fuel] += spentfuelper1s; Accu.Distance[Fuel] += ((1UL*WEGpulses*Config.Wheel) / (100UL*Config.PulsPerRot)); //Obliczamy również ilośc paliwa pozostającego w baku pojazdu [ul] pod warunkiem, że jeszcze jakieś pozostało if(accu.remainingfuel[fuel] >= spentfuelper1s) Accu.remainingFuel[Fuel] -= spentfuelper1s; //Dla potrzeb procedury kalibracji akumulujemy sumaryczny czas wtrysków, jesli tylko ta procedura jest aktywna if(config.calibration[fuel]) Accu.Injection[Fuel] += injectiontime; //Obliczamy wartości chwilowe dostępne z pomiarów wykonywanych co 1 sekundę Speed = ((36UL*WEGpulses*Config.Wheel) / (1000UL*Config.PulsPerRot)); //Prędkosc chwilowa [km/h] if(speed > Accu.Vmax) Accu.Vmax = Speed; //Zapamiętujemy wartość maksymalnej prędkości //Zużycie chwilowe dla wszystkich wtrysków: w [l/h *10] gdy Speed<=5 i w [l/100km *10] gdy Speed>5 if(speed<=5) Consum = ((5UL*Config.Cylinders*injectionTime*Config.CcPerMin[Fuel]) / UL); else Consum = ((5UL*Config.Cylinders*injectionTime*Config.CcPerMin[Fuel]*Config.PulsPerRot) / (144UL*WEGpulses*Config.Wheel)); if(consum > 999) Consum = 999; //Zabezpieczenie przed przekroczeniem zakresu //Na podstawie akumulat. wartości zużytego paliwa i przejech. dystansu obliczamy wartości średnie prędkości oraz zużycia paliwa SpeedAvg = ((36UL*Accu.Distance[Fuel])/(10UL*Accu.Measurements[Fuel])); //[km/h] if(accu.distance[fuel]>999) ConsumAvg = (Accu.spentFuel[Fuel]/Accu.Distance[Fuel]); else ConsumAvg = 0; //l/100km *10 //Obliczamy dostępny zasięg pojazdu na pozostałym w baku paliwie [km] = pozostałe paliwo/średnie zużycie paliwa if(accu.spentfuel[fuel]) availabledistance = (Accu.remainingFuel[Fuel]*Accu.Distance[Fuel])/(1000UL*Accu.spentFuel[Fuel]); else available- Distance = 0; if(availabledistance > 999) availabledistance = 999; //Zabezpieczenie przed przekroczeniem zakresu /* InjectionTime sumaryczny czas wtrysku zliczony w czasie 1s [ms*48] WEGpulses liczba impulsów z przetwornika drogi zliczona w czasie 1 sekundy Fuel bieżący rodzaj paliwa zmienna ustawiana w procedurze przerwania PCINT1 spentfuelper1s bieżące paliwo spalone w czasie ostatniej sekundy [ul] Accu.Measurements akumulator liczby interwałów pomiarowych [s] oddzielnie dla każdego paliwa Accu.spentFuel akumulator ilości spalonego paliwa [ul] oddzielnie dla każdego paliwa Accu.remainingFuel akumulator ilości paliwa pozostającego w baku [ul] oddzielnie dla każdego paliwa Accu.Distance akumulator przejechanego dystansu [m] oddzielnie dla każdego paliwa Consum chwilowe zużycie paliwa [l*10/h], dla prędkości 5 km/h lub [l*10/100km], dla prędkości>5 km/h ConsumAvg średnie zużycie paliwa [l*10/100km] Speed prędkość chwilowa [km/h] SpeedAvg prędkośc średnia [km/h] availabledistance orientacyjny, dostępny dystans na paliwie pozostającym w baku [km] oddzielnie dla każdego paliwa Config.CcPerMin stała wtryskiwacza [ml/min] oddzielnie dla każdego paliwa Config.PulsPerRot stała przetwornika drogi [imp/obr] Config.Cylinders liczba wtryskiwaczy paliwa Config.Wheel obwód opony [cm] */ ELEKTRONIKA PRAKTYCZNA 1/
11 +3.3V R12 3k T1 BC817 R13 1k TID_CON NTC+ KEYON 1 DIAG AA 2 3 WEG BATT 4 SCL LIT 5 SDA NTC MRQ 6 KEYON BATT R19 1k +3.3V R17 8k2 R14 3k R15 3k R16 3k R18 3k +3.3V VCC R2 6k34 C1 22pF C2 22pF MHz L1 10uH R1 10k Q RES U4 VCC VCC VCC RESET XTAL2 XTAL1 AREF AVCC (PCINT7/ADC7)PA7 (PCINT6/ADC6)PA6 (PCINT5/ADC5)PA5 (PCINT4/ADC4)PA4 (PCINT3/ADC3)PA3 (PCINT2/ADC2)PA2 (PCINT1/ADC1)PA1 (PCINT0/ADC0)PA0 (PCINT15/SCK)PB7 (PCINT14/MISO)PB6 (PCINT13/MOSI)PB5 (PCINT12/OC0B/SS)PB4 (PCINT11/OC0A/AIN1)PB3 (PCINT10/INT2/AIN0)PB2 (PCINT9/CLKO/T1)PB1 (PCINT8/XCK0/T0)PB SCK MENU/< MISO MOSI OK/> C3 100nF C4 470nF C5 100nF (PCINT23/TOSC2)PC7 (PCINT22/TOSC1)PC6 (PCINT21/TDI)PC5 (PCINT20/TDO)PC4 (PCINT19/TMS)PC3 (PCINT18/TCK)PC2 (PCINT17/SDA)PC1 (PCINT16/SCL)PC (PCINT31/OC2A)PD7 (PCINT30/OC2B/ICP)PD6 (PCINT29/OC1A)PD5 (PCINT28/OC1B)PD4 (PCINT27/INT1)PD3 (PCINT26/INT0)PD2 (PCINT25/TXD0)PD1 (PCINT24/RXD0)PD ATMEGA644PA U1 U3 MCP EDB 2x22pF U2 MCP EDB C8 Q2 KEYON X1 VCC VI VO +3.3V VO VI BATT TAB C9 2 X2 MFP 7 R3 TAB 32768Hz 10k SCL 6 R4 C6 C7 3k 4 SDA 5 R5 10uF 10uF 3k C11 C12 10uF MCP7940N I/SN 1uF C10 100nF Rysunek 7. Schemat ideowy komputera samochodowego multitid 22 ELEKTRONIKA PRAKTYCZNA 1/2017
12 multitid wielofunkcyjny, samochodowy komputer pokładowy T2 BC V V 5 2 C13 100nF 1 3 LEDA1 LEDK1 LEDA2 LEDK2 IM0 IM1 IM2 SDO SDI U5 NC7SB3157 A2 K2 1 2 RES RD WR RS CS R20 10 R21 10 U6 LTV817S SMD PB Pb 3 PB 1 R6 1k 3k R7 C14 100nF R9 3k VCI VCC IOVCC VSYNC HSYNC DCLK ENA FMARK DB17 DB16 DB15 DB14 DB13 DB12 DB11 DB10 DB9 DB8 DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB R8 8k2 LPG 3 U7 LTV817S SMD TFT MI042CT V +3.3V D1 1N4148 LPG LPG LPG KEYON +3.3V D2 1N4148 R10 1k 3k R11 DODATKOWE MATERIAŁY NA FTP: ftp://ep.com.pl user: 33948, pass: 5gcckdmq W ofercie AVT* AVT-5562 Podstawowe informacje: ynapięcie zasilania: 8 15 V DC. ymaksymalny prąd obciążenia (z napięcia +12 V): 10 ma. yprąd podtrzymania zegara RTC (z napięcia BATT): 1 ma. ymaksymalny prąd podświetlenia (z napięcia ILL+): 75 ma. ydokładność pomiaru temperatury: 1 C. yzakres pomiarowy temperatury zewnętrznej: C. yzakres pomiarowy prędkości pojazdu: km/godz. yzakres pomiarowy chwilowego zużycia paliwa: 0 99,9 l/100 km. yzakres pomiarowy średniego zużycia paliwa: 0 25,5 l/100 km. yzakres pomiarowy paliwa dostępnego w baku: 0 99,9 l. yzakres pomiarowy przejechanej odległości: km. yzakres pomiarowy dystansu do przejechania na dostępnym paliwie: km. yzakresy regulacji parametrów konfiguracyjnych: Stałe wtryskiwaczy: ml/min. Stała przetwornika drogi: 1 99 impulsów/obrót. Obwód opony: cm. Liczba cylindrów: 2 8. Pojemności baków: l. yprzesunięcie belek informacyjnych: 0 9 pikseli. Projekty pokrewne na FTP: (wymienione artykuły są w całości dostępne na FTP) AVT-5545 Komputer samochodowy Mee MK II (2.0) (EP 7-8-9/2016) AVT-5495 Uniwersalny komputer samochodowy Mee (EP 3/2015) AVT-3095 Komputer samochodowy (EdW 4-5/2014) AVT-5405 TripCo komputer samochodowy (EP 7/2013) AVT-5395 TIDex komputer dla samochodów z silnikiem Diesla (EP 5/2013) * Uwaga: Zestawy AVT mogą występować w następujących wersjach: AVT xxxx UK to zaprogramowany układ. Tylko i wyłącznie. Bez elementów dodatkowych. AVT xxxx A płytka drukowana PCB (lub płytki drukowane, jeśli w opisie wyraźnie zaznaczono), bez elementów dodatkowych. AVT xxxx A+ płytka drukowana i zaprogramowany układ (czyli połączenie wersji A i wersji UK) bez elementów dodatkowych. AVT xxxx B płytka drukowana (lub płytki) oraz komplet elementów wymieniony w załączniku pdf AVT xxxx C to nic innego jak zmontowany zestaw B, czyli elementy wlutowane w PCB. Należy mieć na uwadze, że o ile nie zaznaczono wyraźnie w opisie, zestaw ten nie ma obudowy ani elementów dodatkowych, które nie zostały wymienione w załączniku pdf AVT xxxx CD oprogramowanie (nieczęsto spotykana wersja, lecz jeśli występuje, to niezbędne oprogramowanie można ściągnąć, klikając w link umieszczony w opisie kitu) Nie każdy zestaw AVT występuje we wszystkich wersjach! Każda wersja ma załączony ten sam plik pdf! Podczas składania zamówienia upewnij się, którą wersję zamawiasz! (UK, A, A+, B lub C). Tabela 6. Konfiguracja peryferiów Atmega644-PA dla potrzeb pomiarów Timer0 Timer1 Nazwa Sposób konfiguracji Funkcjonalność Przerwanie INT0 Licznik impulsów zewnętrznych podawanych na wejście T0 reakcja na zbocze opadające. Licznik taktowany wewnętrznym przebiegiem o częstotliwości 48 khz (preskaler=256, 48 taktów na 1 ms). Wejście Input/Capture dołączone do układu formującego przebieg z wtryskiwacza paliwa. Wyzwalane zboczem opadającym na wejściu INT0, do którego doprowadzono wyjście częstotliwości wzorcowej zegara RTC. Liczy impulsy przetwornika drogi WEG zapewniając pomiar przejechanego dystansu. Mierzy sumaryczny czas wtrysku w czasie 1 s. zapewniając pomiar zużytego paliwa. Służy do odmierzania czas pomiaru równego 1 s. ELEKTRONIKA PRAKTYCZNA 1/


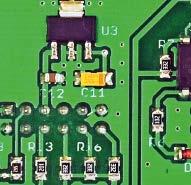
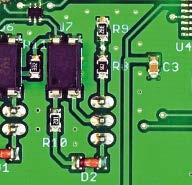
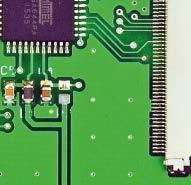
13 Rysunek 8 Schemat montażowy komputera samochodowego multitid Fotografia 9 Wygląd obwodu drukowanego zmontowanego sterownika multitid od strony elementów (bez wyświetlacza TFT) REKLAMA Elektronika Praktyczna na 24 ELEKTRONIKA PRAKTYCZNA 1/2017

14 multitid wielofunkcyjny, samochodowy komputer pokładowy (3) Omówiliśmy już sposób działania oraz budowę komputera multitid. Teraz przyszedł czas na zamontowanie go w samochodzie, skonfigurowanie, a wreszcie użytkowanie! Schemat montażowy komputera samochodowego multitid pokazano na rysunku 8, opublikowanym w poprzedniej części artykułu w EP 1/2017. Zaprojektowano zwarty, dwustronny obwód drukowany, złożony w głównej mierze z elementów przeznaczonych do montażu powierzchniowego. Co bardzo ważne w wypadku pracy w środowisku o potencjalnie dużym poziomie zaburzeń, jakim bez wątpienia jest instalacja samochodowa, zadbano o odpowiednie prowadzenie masy i sygnałów krytycznych. Z uwagi na fakt, że moduł wyświetlacza TFT jest dołączony do płytki z użyciem gniazda ZIF o gęstym rastrze (45 wyprowadzeń co 0,5 mm), montaż rozpoczynamy od przylutowania tego gniazda. Należy przy tym posłużyć się cyną z odpowiednią ilością topnika oraz cienką plecionką, która umożliwi usunięcie nadmiaru cyny. Jakość tak wykonanego połączenia sprawdzamy pod lupą oraz kontrolujemy zwarcia multimetrem. Wspomniana kontrola będzie znacznie łatwiejsza, jeśli zmontowana płytkę sterownika przemyjemy alkoholem izopropylowym w celu wypłukania nadmiaru kalafonii. Następnie lutujemy mikrokontroler, pozostałe elementy półprzewodnikowe SMD, elementy bierne, a na samym końcu wszystkie elementy przeznaczone do montażu przewlekanego. 46 ELEKTRONIKA PRAKTYCZNA 2/2017 Ostatnimi podzespołami, które należy wlutować po stronie wyprowadzeń (BOTTOM), są gniazda podłączeniowe: TID_CON (najlepiej oryginalne, wylutowane z wyświetlacza TID), Pb, LPG. Na samym końcu przyłączamy taśmę wyświetlacza TFT do złącza ZIF, dbając o odpowiednie zablokowanie zatrzasków złącza, natomiast sam panel TFT przyklejamy do płytki sterownika, korzystając z 4 dystansów o wysokości równej wysokości najwyższego elementu montowanego po stronie TOP oraz dwustronnej taśmy klejącej. Na fotografii 9 pokazano wygląd zmontowanego komputera multitid bez wyświetlacza TFT. Połączenia Konstruując multitid, kierowałem się założeniem, że jego włączenie w miejsce oryginalnego wyświetlacza pokładowego TID powinno sprowadzać się do zwykłego wpięcia przewodów. Idąc tym tokiem myślenia, urządzenie multitid wyposażyłem w 12-pinowe złącze o rozmieszczeniu wyprowadzeń zgodnym z oryginałem, co umożliwia wlutowanie w to miejsce elementu wymontowanego z oryginalnego, 10-znakowego wyświetlacza pokładowego (z Astry G, Corsy C itp.). Oczywiście, w tym miejscu możemy również zastosować listwę goldpin 2 6 pinów. Rozmieszczenie wyprowadzeń, o którym wspomniałem wcześniej, dotyczy wersji wyświetlacza TID o organizacji 10-znakowej, więc jeśli urządzenie multitid ma być zainstalowane w pojeździe wyposażonym Fotografia 9. Wygląd obwodu drukowanego zmontowanego sterownika multitid od strony elementów (bez wyświetlacza TFT)
: 10 ma.")
15 multitid wielofunkcyjny, samochodowy komputer pokładowy DODATKOWE MATERIAŁY NA FTP: ftp://ep.com.pl user: 97325, pass: 6yfwxr8q W ofercie AVT* AVT-5562 Podstawowe informacje: ynapięcie zasilania: 8 15 V DC. ymaksymalny prąd obciążenia (z napięcia +12 V): 10 ma. yprąd podtrzymania zegara RTC (z napięcia BATT): 1 ma. ymaksymalny prąd podświetlenia (z napięcia ILL+): 75 ma. ydokładność pomiaru temperatury: 1 C. yzakres pomiarowy temperatury zewnętrznej: C. yzakres pomiarowy prędkości pojazdu: km/godz. yzakres pomiarowy chwilowego zużycia paliwa: 0 99,9 l/100 km. yzakres pomiarowy średniego zużycia paliwa: 0 25,5 l/100 km. yzakres pomiarowy paliwa dostępnego w baku: 0 99,9 l. yzakres pomiarowy przejechanej odległości: km. yzakres pomiarowy dystansu do przejechania na dostępnym paliwie: km. yzakresy regulacji parametrów konfiguracyjnych: Stałe wtryskiwaczy: ml/min. Stała przetwornika drogi: 1 99 impulsów/obrót. Obwód opony: cm. Liczba cylindrów: 2 8. Pojemności baków: l. yprzesunięcie belek informacyjnych: 0 9 pikseli. Projekty pokrewne na FTP: (wymienione artykuły są w całości dostępne na FTP) AVT-5545 Komputer samochodowy Mee MK II (2.0) (EP 7 8 9/2016) AVT-5495 Uniwersalny komputer samochodowy Mee (EP 3/2015) AVT-3095 Komputer samochodowy (EdW 4 5/2014) AVT-5405 TripCo komputer samochodowy (EP 7/2013) * Uwaga: Zestawy AVT mogą występować w następujących wersjach: AVT xxxx UK to zaprogramowany układ. Tylko i wyłącznie. Bez elementów dodatkowych. AVT xxxx A płytka drukowana PCB (lub płytki drukowane, jeśli w opisie wyraźnie zaznaczono), bez elementów dodatkowych. AVT xxxx A+ płytka drukowana i zaprogramowany układ (czyli połączenie wersji A i wersji UK) bez elementów dodatkowych. AVT xxxx B płytka drukowana (lub płytki) oraz komplet elementów wymieniony w załączniku pdf AVT xxxx C to nic innego jak zmontowany zestaw B, czyli elementy wlutowane w PCB. Należy mieć na uwadze, że o ile nie zaznaczono wyraźnie w opisie, zestaw ten nie ma obudowy ani elementów dodatkowych, które nie zostały wymienione w załączniku pdf AVT xxxx CD oprogramowanie (nieczęsto spotykana wersja, lecz jeśli występuje, to niezbędne oprogramowanie można ściągnąć, klikając w link umieszczony w opisie kitu) Nie każdy zestaw AVT występuje we wszystkich wersjach! Każda wersja ma załączony ten sam plik pdf! Podczas składania zamówienia upewnij się, którą wersję zamawiasz! (UK, A, A+, B lub C). w starszą wersję wyświetlacza (np. Astra F, Corsa B) lub pojeździe o innym rodzaju złącza (np. Omega, Vectra B), konieczne jest odpowiednie dopasowanie sygnałów sterujących oryginalnego złącza wyświetlacza pojazdu do sygnałów sterujących złącza sterownika multitid. W aucie innym niż Opel, stosowne sygnały, które zgrupowane są standardowo w złączu wyświetlacza TID, pobieramy tym razem ze złącza ISO radioodbiornika. Wygląd typowych złączy ISO radioodbiornika wraz z zaznaczeniem interesujących nas wyprowadzeń pokazano na rysunku 10. Rysunek 10. Rodzaje złączy radioodbiornika z opisem wyprowadzeń Co ciekawe, w zależności od marki pojazdu, piny o numerach 4 i 7 (oznaczone jako +12 V i BATT) mogą być zamienione miejscami, dlatego ich rzeczywiste funkcje należy ustalić eksperymentalnie. Napięcie na pinie +12 V powinno występować wyłącznie po włączeniu zapłonu (przekręceniu kluczyka), a na pinie BATT na stałe. Napięcie na pinie ILL+ to zwyczajowo przebieg prostokątny o amplitudzie ok. +12 V i wypełnieniu zależnym od ustawienia pokrętła regulującego jasność podświetlenia zegarów pojazdu. To napięcie jest używane do regulacji jasności podświetlenia wyświetlacza urządzenia multitid. Jeśli nie zależy nam na takiej funkcjonalności, pin ILL+ należy zewrzeć z pinem +12 V. Wszystkie połączenia, o których mowa powyżej, zapewniają jednak realizację części funkcjonalności sterownika tj. wszystkich funkcji niezwiązanych z pomiarem spalania. Aby umożliwić pomiar spalania, należy do urządzenia multitid dostarczyć sygnał z wtryskiwacza/wtryskiwaczy paliwa (dla przypadku zasilania auta wyłącznie benzyną) oraz sygnał z zaworu reduktora instalacji LPG (dla przypadku zasilania auta zarówno benzyną, jak i gazem LPG). Połączenie multitid z modułem wtryskiwacza paliwa Połączenia układu w tym zakresie należy wykonać nader starannie, zachowując dużą ostrożność, by nie doprowadzić do zwarcia przewodów zasilających wtryskiwacz, co mogłoby skutkować uszkodzeniem wyjściowych obwodów sterujących elektronicznego układu sterującego pracą silnika ECU. Każdy wtryskiwacz ma 2 wyprowadzenia. Pierwsze z nich to stałe napięcie +12 V, które zostaje podane po przekręceniu kluczyka stacyjki i które należy doprowadzić do złącza + stosownego gniazda urządzenia multitid (Pb i LPG, przy zasilaniu gazem LPG). Drugie to sygnał sterujący z modułu ECU (komutowana masa), który z kolei należy doprowadzić do wejścia. Przewody połączeniowe należy starannie zabezpieczyć przed możliwością ewentualnego przetarcia izolacji i powstania zwarcia dotyczy to zwłaszcza wszelkiego rodzaju otworów przelotowych, przez które zostaną one przeprowadzone. Aby zabezpieczyć wejściowy układ pomiarowy czasu wtrysku przed zaburzeniami (np. od będącej zwykle w pobliżu listwy zapłonowej), najlepiej zastosować dwużyłowy przewód ekranowany o odpowiednim przekroju, a ekran tego przewodu po obu stronach połączyć z masą pojazdu. Możliwe jest także połączenie układu formującego impulsy wtryskiwaczy paliwa bezpośrednio z wyjściem odpowiedniego sterownika (ECU silnika i komputera instalacji LPG). Wtedy należy odpowiednio zmniejszyć wartości rezystorów R6/R10 ustalających prądy diod LED transoptorów LTV817. Obsługa Sterownik multitid jest urządzeniem, które zwykle będzie obsługiwane podczas jazdy samochodem, więc podstawowym kryterium przyjętym podczas tworzenia menu użytkownika były ergonomia, łatwość obsługi i czytelność interfejsu użytkownika. Zgodnie z tymi założeniami, na płytce sterownika przewidziano jedynie 2 elementy sterujące umownie oznaczone MENU/< i OK/>. Przycisk MENU/< służy do zmiany aktualnie wyświetlanego ekranu menu, a przycisk OK/> do wykasowania liczników REKLAMA ELEKTRONIKA PRAKTYCZNA 2/
16 Rysunek 11. Diagram obrazujący system Menu i sposób obsługi sterownika multitid dystansu, średnich wartości obliczeniowych lub wyzerowania statystyk spalania. Zastosowanie tylko dwóch przycisków pozwala również na dołączenie do urządzenia multitid oryginalnej manetki komputera pokładowego, która poprawia ergonomię użytkowania urządzenia. Nie są to jednak wszystkie funkcje wspomnianych elementów, gdyż ich funkcjonalność zależna jest od aktualnego trybu pracy układu multitid. Na rysunku 11 pokazano diagram obrazujący system menu oraz sposób obsługi urządzenia. Na tym rysunku symbole przycisków wypełnione kolorem czarnym oznaczają długie naciśnięcie wybranego przycisku. Warto zauważyć, że funkcja wyświetlania ilości dostępnego paliwa w zbiorniku nie korzysta z sygnału informującego o rzeczywistym poziomie paliwa, gdyż jej implementacja, skalowanie i samo włączenie sterownika do instalacji pojazdu byłoby dość kłopotliwe. Mechanizm jej działania jest w tym wypadku bardzo prosty i zakłada każdorazowe uzupełnianie bieżącego odczytu o ilość zatankowanego paliwa, co jest możliwe poprzez wejście w tryb edycji paliwa dostępnego w zbiorniku. A więc po każdym tankowaniu pojazdu należy wejść w edycję dostępnego 48 ELEKTRONIKA PRAKTYCZNA 2/2017 paliwa i zwiększyć jego ilość o zatankowaną wartość (zmiana o pełne litry). Mechanizm pomiarowy sterownika multitid będzie następnie odejmował od wartości dostępnego paliwa zużywane paliwo, co umożliwia realizację wspomnianej funkcjonalności. Słowo komentarza należy się także samemu interfejsowi graficznemu. Konstruując sterownik multitid, chciałem, aby formą prezentacji danych oraz możliwościami dorównywał rozwiązaniom znanym ze współczesnej motoryzacji, zwłaszcza w tzw. segmencie Premium. Podstawowym zadaniem było w takim razie zaprojektowanie czytelnego i ładnego interfejsu użytkownika z wykorzystaniem efektownych, kolorowych elementów graficznych. Nie było to zadanie łatwe i opracowanie interfejsu graficznego zajęło mi najwięcej czasu, włączając w to wykonanie wielu drobnych ikon. Zdecydowałem się na kolorystykę zbliżoną do sepii, gdyż taka wydała mi się najbardziej stonowana i elegancka, a przy okazji pasująca do kolorów podświetlenia stosowanych przez Opla. Na rysunku 12 pokazano wygląd Menu zużycia paliwa wraz z opisem wszystkich wyświetlanych danych (w tym danych znajdujących się na górnej i dolnej belce informacyjnej, które wyświetlane są zawsze, niezależnie od aktywnego ekranu menu). Znaczenie poszczególnych danych jest następujące: 1. Bieżąca godzina. 2. Bieżąca data. 3. Chwilowe zużycie paliwa (w l/godz. dla prędkości poniżej 5 km/godz., dla pozostałych prędkości w l/100 km) wraz z oznaczeniem aktualnie używanego paliwa. 4. Dostępna ilość aktualnie używanego paliwa (w tym, graficzna prezentacja w formie bargrafu, który zmienia kolor na czerwony w przypadku, jeśli w zbiorniku jest poniżej 10% paliwa). 5. Prognozowany dystans na dostępnym, bieżącym rodzaju paliwa (liczony w oparciu o średnie zużycie paliwa). 6. Temperatura na zewnątrz pojazdu. 7. Ikonka śnieżynki informująca o śliskiej nawierzchni (dla temperatury poniżej 4 C). 8. Ikonka informująca o aktywnym trybie kalibracji stałej wtryskiwacza. 9. Informacje tekstowe przesyłane przez radioodbiornik Opla plus ikonki reprezentujące status radia/magnetofonu/cd.


17 multitid wielofunkcyjny, samochodowy komputer pokładowy 10. Średnie zużycie paliwa w l/100 km. Na rysunku 13 pokazano wygląd Menu prędkości z opisem wyświetlanych danych. Znaczenie poszczególnych danych jest następujące: 1. Chwilowa prędkość pojazdu w km/godz. 2. Maksymalna, zarejestrowana prędkość pojazdu w km/godz. 3. Przejechany dystans w km (od ostatniego kasowania tego licznika) dla aktualnie używanego paliwa. 4. Średnia prędkość pojazdu w km/godz. Na rysunku 14 pokazano wygląd Menu statystyk wraz z opisem wszystkich wyświetlanych danych. Znaczenie poszczególnych danych jest następujące: 1. Słupki reprezentujące średnie zużycie paliwa, dla bieżącego rodzaju paliwa, na każde przejechane 10 km lub 1 km (w zależności od wybranej opcji). Możliwość wyświetlenia kolejnego słupka zależy, co oczywiste, od aktualnie przejechanego dystansu oraz wybranej skali wykresu. Wykres pokazuje zawsze statystyki dla ostatnio przejechanych 150 km lub 15 km i jest aktualizowany co jednostkę skali dystansu (przesuwa się w lewo po przejechaniu 150 km lub 15 km). 2. Linia reprezentująca średnie zużycie paliwa dla bieżącego rodzaju paliwa w l/100 km (wraz z wartością). 3. Skala dla wykresu średniego zużycia paliwa dla bieżącego rodzaju paliwa (zmieniana z poziomu menu). 4. Średnia prędkość pojazdu w km/godz. (od ostatniego kasowania tego licznika). 5. Przejechany dystans w km dla bieżącego rodzaju paliwa (od ostatniego kasowania tego licznika). 6. Czas jazdy (od ostatniego kasowania tego licznika). Na rysunku 15 pokazano wygląd Menu konfiguracyjnego. Znaczenie poszczególnych opcji Menu konfiguracyjnego jest następujące: Tire perimeter: obwód koła w [cm]. Pulses/rotation: stała przetwornika drogi. Pb injector flow: stała wtryskiwacza benzyny [cm 3 ]. LPG injector flow: stała wtryskiwacza gazu LPG [cm 3 ]. Cylinders: liczba cylindrów. Pb tank capacity: pojemność zbiornika paliwa [l]. LPG tank capacity: pojemność zbiornika gazu LPG [l]. Time: aktualny czas (format 24-godzinny). Date: aktualna data. Info bar offset: przesunięcie górnej i dolnej belki informacyjnej w kierunku środka ekranu [piksel]. Interface type: kolorystyka interfejsu użytkownika [Sepia/Blue]. Opcja Info bar offset służy do przesunięcia górnej i dolnej belki informacyjnej w kierunku środka ekranu o zadaną liczbę pikseli obrazu (0...9). Funkcja ta może być użyteczna w przypadku, gdy pionowy wymiar okna przeznaczonego na montaż oryginalnego wyświetlacza TID jest mniejszy niż wysokość ekranu, co powodowałoby przesłanianie belek informacyjnych i zawartych tam informacji. Z kolei opcja Interface type pozwala na zmianę kolorystyki Rysunek 12. Wygląd Menu zużycia paliwa Rysunek 13. Wygląd Menu prędkości Rysunek 14. Wygląd Menu statystyk całego interfejsu użytkownika z kolorów sepii na niebieski i odwrotnie. Wygląd przykładowego Menu zużycia paliwa w kolorystyce niebieskiej pokazano na fotografii 16. Wybrana opcja Menu jest podświetlana w kolorze białym, a wejściu w jej edycję towarzyszy negacja tła wybranej wartości (tło staje się białe, zaś wybrane wartości czarne). Wyjściu z trybu konfiguracyjnego ELEKTRONIKA PRAKTYCZNA 2/


18 towarzyszy zapisanie edytowanych wartości w nieulotnej pamięci EEPROM mikrokontrolera i/lub aktualizacja czasu i daty wbudowanego zegara RTC. Setup i tryb kalibracji stałej wtryskiwacza Urządzenie multitid wyposażono w specjalny, konfiguracyjny tryb pracy, dzięki któremu możemy określić pewne, niezbędne parametry regulacyjne nieodzowne z punktu widzenia funkcjonalności komputera pokładowego. Tryb ten uruchamiamy poprzez jednoczesne naciśnięcie przycisków MENU/< i OK/>. Za jego pomocą możemy określić wielkość następujących stałych niezbędnych w procesie obliczania zużycia paliwa, prędkości jazdy oraz drogi: Stała wtryskiwacza dla każdego z rodzajów paliwa (w [ml/min]): jest to wielkość charakterystyczna dla każdego wtryskiwacza elektronicznego wtrysku paliwa informująca nas o ilości paliwa, jakie może on wprowadzić do komory spalania w jednostce czasu (przy założeniu 100% czasu otwarcia zaworu i stałym, charakterystycznym dla każdego wtryskiwacza ciśnieniu zasilającym). Stała przetwornika drogi (impulsatora, w [imp/obr]): jest to wielkość charakterystyczna dla każdego impulsatora informująca nas o liczbie impulsów przypadających na 1 obrót koła (osi). Obwód opony (w [cm]). Liczba cylindrów (a więc i liczba wtryskiwaczy zamontowanych w silniku pojazdu). Pojemność zbiornika paliwa dla każdego z rodzajów (w [l]). Ponadto tryb konfiguracyjny pozwala nam na ustawienie bieżącej daty i godziny wbudowanego zegara RTC. Wspomniane powyżej stałe można znaleźć w Internecie na forach o tematyce motoryzacyjnej lub elektronicznej, lecz wydaje się, że lepszym sposobem jest ich wyznaczenie empiryczne. Dla przykładu, obwód opony, a w zasadzie drogę, jaką pokona pojazd w czasie jednego, pełnego obrotu koła, możemy wyznaczyć dość łatwo. W tym celu zaznaczamy (np. kredą) najniżej położone miejsce styku opony z powierzchnią drogi, następnie standardowo obciążony pojazd przetaczamy, aby koło wykonało jeden, pełny obrót, po czym mierzymy pokonany odcinek drogi. Co oczywiste, wszystkie wprowadzone wartości zostaną zachowane w nieulotnej pamięci EEPROM urządzenia. Niestety, jak pokazała praktyka, pewnych trudności może czasami nastręczać znalezienie parametrów stosowanych w naszym pojeździe wtryskiwaczy, ponieważ są one często wykonywane na zamówienie producenta pojazdu i na próżno szukać ich oznaczeń na stronach producentów podzespołów. Na szczęście przewidziano pewien Rysunek 15. Wygląd Menu konfiguracyjnego Fotografia 16. Wygląd przykładowego Menu zużycia paliwa w kolorystyce niebieskiej urządzenia multitid mechanizm, za którego pomocą sterownik multitid jest w stanie samodzielnie wyznaczyć poszukiwaną stałą na podstawie informacji o zużytym paliwie i pomiarze sumarycznego czasu wtrysków. Do tego celu przewidziano specjalny tryb kalibracyjny, który może być uruchomiony poprzez jednoczesne naciśnięcie przycisków MENU/< i OK/>, co zostanie zasygnalizowane wyświetleniem ikony na dolnej belce informacyjnej graficznego interfejsu użytkownika. Ponowne wykonanie wspomnianych czynności powoduje obliczenie żądanej stałej wtryskiwacza a następnie opuszczenie procesu kalibracji. Co oczywiste, do czasu zakończenia procesu kalibracji nie są dostępne następujące wartości obliczeniowe: chwilowe i średnie zużycie paliwa, ilość paliwa dostępnego w baku pojazdu (jest to sygnalizowane wyświetleniem symboli w odpowiednich polach wspomnianych wartości) oraz menu statystyk spalania. Aby przeprowadzenie procesu kalibracji miało w ogóle sens, należy zastosować następujący algorytm postępowania: Zużyć całe, dostępne paliwo, aż do zaświecenia się lampki sygnalizującej tzw. rezerwę paliwa. Zatankować 20 l paliwa. Uruchomić procedurę kalibracji. Zużyć całe, dostępne paliwo (zatankowane wcześniej 20 l), aż do ponownego zaświecenia się lampki sygnalizującej tzw. rezerwę paliwa. Zakończyć procedurę kalibracji. Po wykonaniu tych czynności układ multitid obliczy i zapisze, w nieulotnej pamięci EEPROM mikrokontrolera, wartość stałej wtryskiwacza, po czym przejdzie do normalnego trybu pracy. Oczywiście stałą taką wyznaczamy dla każdego z rodzajów paliwa oddzielnie, co oznacza, że w czasie aktywnego procesu kalibracji nie wolno zmieniać rodzaju paliwa. Gdyby obliczona przez sterownik wartość stałej wtryskiwacza powodowała zaniżanie lub zawyżanie rzeczywistego spalania paliwa, w każdej chwili możemy dokonać odpowiedniej korekty poprzez wejście w menu konfiguracji urządzenia i zwiększenie (przy zaniżaniu spalania) lub zmniejszenie (przy zawyżaniu spalania) wspomnianej wartości. Należy zaznaczyć, że tak jak w przypadku oryginalnych rozwiązań typu komputer pokładowy, obliczane wartości zużycia paliwa są obarczone pewnym błędem wynikającym choćby z założenia stałego ciśnienia zasilającego wtryskiwacz czy też z zaokrągleń obliczeniowych. Testy praktyczne pokazały, że maksymalny błąd pomiarowy jest na poziomie 0,5 l na całą pojemność baku pojazdu, czyli ok. 1%. Robert Wołgajew, EP 50 ELEKTRONIKA PRAKTYCZNA 2/2017
wielofunkcyjny, samochodowy komputer pokładowy (2)
") multitid wielofunkcyjny, samochodowy komputer pokładowy () Po lekturze pierwszej części artykułu wiemy już wszystko w zakresie obsługi wyświetlacza pokładowego oraz emulowania jego funkcjonalności, więc
multitid wielofunkcyjny, samochodowy komputer pokładowy () Po lekturze pierwszej części artykułu wiemy już wszystko w zakresie obsługi wyświetlacza pokładowego oraz emulowania jego funkcjonalności, więc
multitid wielofunkcyjny, samochodowego komputera
 PROJEKTY multitid wielofunkcyjny, samochodowy komputer pokładowy (1) Kilkakrotnie podejmowałem wyzwanie zaprojektowania komputera pokładowego i to zarówno takiego, który korzysta z oryginalnego, wbudowanego
PROJEKTY multitid wielofunkcyjny, samochodowy komputer pokładowy (1) Kilkakrotnie podejmowałem wyzwanie zaprojektowania komputera pokładowego i to zarówno takiego, który korzysta z oryginalnego, wbudowanego
Komputer samochodowy Mee 2.0 (2)
") PROJEKTY Komputer samochodowy Mee.0 () W poprzedniej części omówiliśmy ważniejsze części oprogramowania, w tym obsługę wyświetlacza TFT. Najwyższy czas na opisanie budowy komputera, pokazanie schematów
PROJEKTY Komputer samochodowy Mee.0 () W poprzedniej części omówiliśmy ważniejsze części oprogramowania, w tym obsługę wyświetlacza TFT. Najwyższy czas na opisanie budowy komputera, pokazanie schematów
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
wielofunkcyjny, samochodowy komputer pokładowy (3)
") multitid wielofunkcyjny, samochodowy komputer pokładowy (3) Omówiliśmy już sposób działania oraz budowę komputera multitid. Teraz przyszedł czas na zamontowanie go w samochodzie, skonfigurowanie, a wreszcie
multitid wielofunkcyjny, samochodowy komputer pokładowy (3) Omówiliśmy już sposób działania oraz budowę komputera multitid. Teraz przyszedł czas na zamontowanie go w samochodzie, skonfigurowanie, a wreszcie
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu. Jakub Stanisz
 WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
ZL28ARM. Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC
 ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
ZL8AVR. Płyta bazowa dla modułów dipavr
 ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja. do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1.
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 PAMIĘCI SZEREGOWE EEPROM Ćwiczenie 3 Opracował: dr inŝ.
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
interfejs szeregowy wyświetlaczy do systemów PLC
 LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP
 Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
LITEcompLPC1114. Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Sponsorzy:
 Sponsorzy:") LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
ADVANCE ELECTRONIC. Instrukcja obsługi aplikacji. Modbus konfigurator. Modbus konfigurator. wersja 1.1
 Instrukcja obsługi aplikacji 1 1./ instalacja aplikacji. Aplikacja służy do zarządzania, konfigurowania i testowania modułów firmy Advance Electronic wyposażonych w RS485 pracujących w trybie half-duplex.
Instrukcja obsługi aplikacji 1 1./ instalacja aplikacji. Aplikacja służy do zarządzania, konfigurowania i testowania modułów firmy Advance Electronic wyposażonych w RS485 pracujących w trybie half-duplex.
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
ZL5PIC. Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887
 ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Kod produktu: MP01611-ZK
 ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
STM32 Butterfly. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Konfigurator Modbus. Instrukcja obsługi programu Konfigurator Modbus. wyprodukowano dla
 Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Technika mikroprocesorowa. Konsola do gier
 K r a k ó w 1 1. 0 2. 2 0 1 4 Technika mikroprocesorowa Konsola do gier W yk o n a l i : P r o w a d z ą c y: P a w e ł F l u d e r R o b e r t S i t k o D r i n ż. J a c e k O s t r o w s k i Opis projektu
K r a k ó w 1 1. 0 2. 2 0 1 4 Technika mikroprocesorowa Konsola do gier W yk o n a l i : P r o w a d z ą c y: P a w e ł F l u d e r R o b e r t S i t k o D r i n ż. J a c e k O s t r o w s k i Opis projektu
LITEcomp. Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19
 LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
ZL16AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168
 ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
ZL16AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega8/48/88/168 ZL16AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerówavr w obudowie 28-wyprowadzeniowej (ATmega8/48/88/168). Dzięki
MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN
 MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
MODBUS RTU wersja M1.14 protokół komunikacyjny do wyświetlaczy SEM 04.2010 Str. 1/5 MODBUS RTU wersja M1.14 protokół komunikacyjny wyświetlaczy LDN W wyświetlaczach LDN protokół MODBUS RTU wykorzystywany
Sprawozdanie z projektu MARM. Część druga Specyfikacja końcowa. Prowadzący: dr. Mariusz Suchenek. Autor: Dawid Kołcz. Data: r.
 Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
Sprawozdanie z projektu MARM Część druga Specyfikacja końcowa Prowadzący: dr. Mariusz Suchenek Autor: Dawid Kołcz Data: 01.02.16r. 1. Temat pracy: Układ diagnozujący układ tworzony jako praca magisterska.
SYSTEM PRZERWAŃ ATmega 32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWAŃ ATmega 32 Opracował: mgr inż.
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWAŃ ATmega 32 Opracował: mgr inż.
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
RS-H0-05 (K)* Czytnik RFID MHz Mifare. Karta użytkownika
* Czytnik RFID MHz Mifare. Karta użytkownika") RS-H0-05 (K)* Czytnik RFID 13.56 MHz Mifare Karta użytkownika *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem
RS-H0-05 (K)* Czytnik RFID 13.56 MHz Mifare Karta użytkownika *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem
Organizacja pamięci VRAM monitora znakowego. 1. Tryb pracy automatycznej
 Struktura stanowiska laboratoryjnego Na rysunku 1.1 pokazano strukturę stanowiska laboratoryjnego Z80 z interfejsem częstościomierza- czasomierz PFL 21/22. Rys.1.1. Struktura stanowiska. Interfejs częstościomierza
Struktura stanowiska laboratoryjnego Na rysunku 1.1 pokazano strukturę stanowiska laboratoryjnego Z80 z interfejsem częstościomierza- czasomierz PFL 21/22. Rys.1.1. Struktura stanowiska. Interfejs częstościomierza
ZL30ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL30ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL30ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI
 Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych. Instrukcja do ćwiczenia laboratoryjnego
 Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA
 WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
Ogólne przeznaczenie i możliwości interfejsu sieciowego przepływomierza UniEMP-05 z protokołem MODBUS. (05.2011)
") Ogólne przeznaczenie i możliwości interfejsu sieciowego przepływomierza UniEMP-05 z protokołem MODBUS. (05.2011) Interfejs sieciowy umożliwia przyłączenie jednego lub więcej przepływomierzy do wspólnej
Ogólne przeznaczenie i możliwości interfejsu sieciowego przepływomierza UniEMP-05 z protokołem MODBUS. (05.2011) Interfejs sieciowy umożliwia przyłączenie jednego lub więcej przepływomierzy do wspólnej
Politechnika Wrocławska, Katedra Inżynierii Biomedycznej Systemy Pomiarowo-Diagnostyczne, laboratorium
 Politechnika Wrocławska, Katedra Inżynierii Biomedycznej Systemy Pomiarowo-Diagnostyczne, laboratorium Ćwiczenie 5 Detektor upadku pacjenta wykorzystujący akcelerometr z interfejsem I 2 C 1. Cel ćwiczenia
Politechnika Wrocławska, Katedra Inżynierii Biomedycznej Systemy Pomiarowo-Diagnostyczne, laboratorium Ćwiczenie 5 Detektor upadku pacjenta wykorzystujący akcelerometr z interfejsem I 2 C 1. Cel ćwiczenia
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu.
 Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
AVR DRAGON. INSTRUKCJA OBSŁUGI (wersja 1.0)
") AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4 firmy Atmel
 Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4
Katedra Metrologii i Optoelektroniki Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska LABORATORIUM MIKROKONTROLERY I MIKROSYSTEMY Stanowisko laboratoryjne dla mikrokontrolera ATXmega32A4
Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515
 Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 5 Zegar czasu rzeczywistego na mikrokontrolerze AT90S8515 Cel ćwiczenia Celem ćwiczenia jest poznanie możliwości nowoczesnych
ZL29ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
AVREVB1. Zestaw uruchomieniowy dla mikrokontrolerów AVR. Zestawy uruchomieniowe www.evboards.eu
 AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
AVREVB1 Zestaw uruchomieniowy dla mikrokontrolerów AVR. 1 Zestaw AVREVB1 umożliwia szybkie zapoznanie się z bardzo popularną rodziną mikrokontrolerów AVR w obudowach 40-to wyprowadzeniowych DIP (układy
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
ZL9AVR. Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019)
 i ZL1ETH (RTL8019)") ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
ZL9AVR Płyta bazowa dla modułów ZL7AVR (ATmega128) i ZL1ETH (RTL8019) ZL9AVR to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów związanych z zastosowaniem mikrokontrolerów AVR w aplikacjach
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
INSTRUKCJA PANEL STERUJĄCY MT-5
 INSTRUKCJA PANEL STERUJĄCY MT-5 Panel sterujący MT-5 miernik cyfrowy z wyświetlaczem LCD. Wskazuje informacje systemu, oznaczenia wykrytych błędów i aktualne parametry pracy. Duże i czytelne symbole i
INSTRUKCJA PANEL STERUJĄCY MT-5 Panel sterujący MT-5 miernik cyfrowy z wyświetlaczem LCD. Wskazuje informacje systemu, oznaczenia wykrytych błędów i aktualne parametry pracy. Duże i czytelne symbole i
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Opis czytnika TRD-FLAT CLASSIC ver. 1.1. Naścienny czytnik transponderów UNIQUE w płaskiej obudowie
 TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
TRD-FLAT CLASSIC Naścienny czytnik transponderów UNIQUE w płaskiej obudowie Podstawowe cechy : zasilanie od 3V do 6V 4 formaty danych wyjściowych POWER LED w kolorze żółtym czerwono-zielony READY LED sterowany
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Kod produktu: MP-BTM222-5V
 Moduł interfejsu Bluetooth na bazie BTM-222, sterowany komendami AT, poziom napięć TTL 5V Urządzenie zbudowano w oparciu o moduł transmisyjny Bluetooth typu BTM-222 firmy Rayson, umożliwiający zasięg bezprzewodowy
Moduł interfejsu Bluetooth na bazie BTM-222, sterowany komendami AT, poziom napięć TTL 5V Urządzenie zbudowano w oparciu o moduł transmisyjny Bluetooth typu BTM-222 firmy Rayson, umożliwiający zasięg bezprzewodowy
MODUŁ UNIWERSALNY UNIV 3
 1. Cechy Moduł służy do budowy modułów systemu automatyki domowej HAPCAN. - Zawiera procesor CPU (PIC18F26K80) - Transceiver CAN MCP2551 - Układ wyprowadzeń zgodny z DIL-24 (15,24mm) - Zgodny z CAN 2.0B
1. Cechy Moduł służy do budowy modułów systemu automatyki domowej HAPCAN. - Zawiera procesor CPU (PIC18F26K80) - Transceiver CAN MCP2551 - Układ wyprowadzeń zgodny z DIL-24 (15,24mm) - Zgodny z CAN 2.0B
» Montaż i podłączenie:
 Sterownik TripCo jest w pełni funkcjonalnym urządzeniem typu komputer pokładowy przeznaczonym do samochodów wyposażonych w elektroniczny wtrysk paliwa. Układ ten realizuje następujące funkcje: Steruje
Sterownik TripCo jest w pełni funkcjonalnym urządzeniem typu komputer pokładowy przeznaczonym do samochodów wyposażonych w elektroniczny wtrysk paliwa. Układ ten realizuje następujące funkcje: Steruje
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
Kod produktu: MP01611-ZK
 ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
Karta katalogowa JAZZ OPLC JZ20-T40/JZ20-J-T wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe. 20 wyjść tranzystorowych
 Karta katalogowa JAZZ OPLC JZ20-T40/JZ20-J-T40 16 wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe 20 wyjść tranzystorowych Specyfikacja techniczna Zasilanie Napięcie zasilania 24 VDC
Karta katalogowa JAZZ OPLC JZ20-T40/JZ20-J-T40 16 wejść cyfrowych, 2 wejścia analogowe/cyfrowe, 2 wejścia analogowe 20 wyjść tranzystorowych Specyfikacja techniczna Zasilanie Napięcie zasilania 24 VDC
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]
![ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]](/thumbs/92/108907590.jpg "ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]") ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Instrukcja obsługi rejestratora SAV35 wersja 10
 Strona 1 z 7 1. OPIS REJESTRATORA SAV35 wersja 10. Rejestrator SAV35 umożliwia pomiar, przesłanie do komputera oraz zapamiętanie w wewnętrznej pamięci przyrządu wartości chwilowych lub średnich pomierzonych
Strona 1 z 7 1. OPIS REJESTRATORA SAV35 wersja 10. Rejestrator SAV35 umożliwia pomiar, przesłanie do komputera oraz zapamiętanie w wewnętrznej pamięci przyrządu wartości chwilowych lub średnich pomierzonych
Opis procedur asemblera AVR
 Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
Piotr Kalus PWSZ Racibórz 10.05.2008 r. Opis procedur asemblera AVR init_lcd Plik: lcd4pro.hvr Procedura inicjuje pracę alfanumerycznego wyświetlacza LCD za sterownikiem HD44780. Wyświetlacz działa w trybie
TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI. Wrocław, lipiec 1999 r.
 TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI Wrocław, lipiec 1999 r. SPIS TREŚCI 1. OPIS TECHNICZNY...3 1.1. PRZEZNACZENIE I FUNKCJA...3 1.2. OPIS
TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI Wrocław, lipiec 1999 r. SPIS TREŚCI 1. OPIS TECHNICZNY...3 1.1. PRZEZNACZENIE I FUNKCJA...3 1.2. OPIS
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
ZL27ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL27ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL27ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę zaawansowanych układów
ZL27ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL27ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę zaawansowanych układów
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 9-236 Łódź, Pomorska 49/53 https://std2.phys.uni.lodz.pl/mikroprocesory/
INDU-22. Przemysłowy Sterownik Mikroprocesorowy. Przeznaczenie. masownica próżniowa
 Przemysłowy Sterownik Mikroprocesorowy INDU-22 Przeznaczenie masownica próżniowa Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v1.1
Przemysłowy Sterownik Mikroprocesorowy INDU-22 Przeznaczenie masownica próżniowa Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v1.1
Mikrokontrolery AVR techniczne aspekty programowania
 Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Andrzej Pawluczuk Mikrokontrolery AVR techniczne aspekty programowania Białystok, 2004 Mikrokontrolery rodziny AVR integrują w swojej strukturze między innymi nieulotną pamięć przeznaczoną na program (pamięć
Opis czytnika TRD-80 CLASSIC ver Moduł czytnika transponderów UNIQUE z wbudowaną anteną
 TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
TRD-80 CLASSIC Moduł czytnika transponderów UNIQUE z wbudowaną anteną Podstawowe cechy : zasilanie od 3V do 6V zintegrowana antena 4 formaty danych wyjściowych wyjście BEEP wyjście PRESENT zasięg odczytu
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x
 ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
W.J WIELICZKA
 Możliwość sterowania modelem robota do ośmiu stopni swobody lub innym urządzeniem wymagającym kontroli ruchu przestrzennego. Rozdzielczość pozycjonowania 512 położeń 9 bitów. Sterowanie z komputera przez
Możliwość sterowania modelem robota do ośmiu stopni swobody lub innym urządzeniem wymagającym kontroli ruchu przestrzennego. Rozdzielczość pozycjonowania 512 położeń 9 bitów. Sterowanie z komputera przez
Tester samochodowych sond lambda
 Tester samochodowych P R O sond J E lambda K T Y Tester samochodowych sond lambda Elektroniczny analizator składu mieszanki AVT 520 Przyrz¹d opisany w artykule s³uøy do oceny sprawnoúci sondy lambda oraz
Tester samochodowych P R O sond J E lambda K T Y Tester samochodowych sond lambda Elektroniczny analizator składu mieszanki AVT 520 Przyrz¹d opisany w artykule s³uøy do oceny sprawnoúci sondy lambda oraz
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Opis Ogólny OPIS OGÓLNY LICZNIKA AL154LI01.
 1. OPIS OGÓLNY LICZNIKA AL154LI01. 8 Przyrząd umożliwia pomiar, wyświetlenie na wyświetlaczu oraz przesłanie na komputer wartości ośmiu niezależnych liczników impulsów. Zerowanie oraz włączenie (uruchomienie)
1. OPIS OGÓLNY LICZNIKA AL154LI01. 8 Przyrząd umożliwia pomiar, wyświetlenie na wyświetlaczu oraz przesłanie na komputer wartości ośmiu niezależnych liczników impulsów. Zerowanie oraz włączenie (uruchomienie)
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Uczeń/Uczennica po zestawieniu połączeń zgłasza nauczycielowi gotowość do sprawdzenia układu i wszystkich połączeń.
 Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
Nazwa implementacji: Termometr cyfrowy - pomiar temperatury z wizualizacją pomiaru na wyświetlaczu LCD Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania elementu zestawu modułu-interfejsu
STHR-2810, 2811, 2812 Przetwornik temperatury i wilgotności z czujnikiem Sensirion
 STHR-2810, 2811, 2812 Przetwornik temperatury i wilgotności z czujnikiem Sensirion AN-STHR-2810_2811_2812v1_01 Data aktualizacji: 08/2011r. 08/2011 AN-STHR-2810_2811_2812v1_01 1 Spis treści Symbole i oznaczenia...
STHR-2810, 2811, 2812 Przetwornik temperatury i wilgotności z czujnikiem Sensirion AN-STHR-2810_2811_2812v1_01 Data aktualizacji: 08/2011r. 08/2011 AN-STHR-2810_2811_2812v1_01 1 Spis treści Symbole i oznaczenia...
1W-H3-05(K)* Czytnik RFID 125 khz Unique. Instrukcja
* Czytnik RFID 125 khz Unique. Instrukcja") 1W-H3-05(K)* Czytnik RFID 125 khz Unique Instrukcja *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem Proszę nie
1W-H3-05(K)* Czytnik RFID 125 khz Unique Instrukcja *Litera K odnosi się do wersji czytnika ze wspólną katodą. Informacje szczególne dla tej wersji będą prezentowane oddzielnie. Przed użyciem Proszę nie
Wbudowane układy peryferyjne cz. 1 Wykład 7
 Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
SZYMAŃSKI ŁÓDŹ Ul. Wiskicka 22 Tel./fax. (042) Tel./fax. (042) Kom
 Tel./fax. (042) Kom") SZYMAŃSKI 93-623 ŁÓDŹ Ul. Wiskicka 22 Tel./fax. (042) 645 92 66 Tel./fax. (042) 250 50 52 Kom. 0 604 938 830 INSTRUKCJA WSAŹNIKA POŁOŻEŃ PRZEŁĄCZNIKA ZACZEPÓW TYPU WNZT 25a Opracował: Edward Szymański
SZYMAŃSKI 93-623 ŁÓDŹ Ul. Wiskicka 22 Tel./fax. (042) 645 92 66 Tel./fax. (042) 250 50 52 Kom. 0 604 938 830 INSTRUKCJA WSAŹNIKA POŁOŻEŃ PRZEŁĄCZNIKA ZACZEPÓW TYPU WNZT 25a Opracował: Edward Szymański
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
Centrala alarmowa ALOCK-1
 Centrala alarmowa ALOCK-1 http://www.alarmlock.tv 1. Charakterystyka urządzenia Centrala alarmowa GSM jest urządzeniem umożliwiającym monitorowanie stanów wejść (czujniki otwarcia, czujki ruchu, itp.)
Centrala alarmowa ALOCK-1 http://www.alarmlock.tv 1. Charakterystyka urządzenia Centrala alarmowa GSM jest urządzeniem umożliwiającym monitorowanie stanów wejść (czujniki otwarcia, czujki ruchu, itp.)
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych