Instytut Ekologii Terenów Uprzemysłowionych w Katowicach
|
|
|
- Bożena Edyta Bednarska
- 9 lat temu
- Przeglądów:
Transkrypt

1 Otwarte seminaria 2015 Instytut Ekologii Terenów Uprzemysłowionych w Katowicach Bezzałogowe pomiarowe platformy pływające (drony) wykorzystywane w inżynierii wodnej i ochronie przeciwpowodziowej dr inż. Andrzej Wolak mgr inż. Piotr Przecherski Politechnika Krakowska Wydział Inżynierii Środowiska Instytut Inżynierii i Gospodarki Wodnej Katowice, 25 czerwca 2015


2 O nas dr inż. Andrzej Wolak - Absolwent Wydziału Inżynierii Sanitarnej i Wodnej Politechniki Krakowskiej. W 2003 r. uzyskał stopień doktora nauk technicznych w zakresie budownictwa na Wydziale Inżynierii Środowiska Politechniki Krakowskiej. Jest autorem i współautorem wielu projektów związanych z ochroną przeciwpowodziową i gospodarką przestrzenną i przede wszystkim budownictwem wodnym. Jest autorem i współautorem wielu projektów i realizacji, również we współpracy z firmami komercyjnymi. Od 2008 roku jest zatrudniony w Instytucie Inżynierii i Gospodarki Wodnej Politechniki Krakowskiej na stanowisku adiunkta naukowo-dydaktycznego. Prowadzi szereg zajęć z przedmiotów związanych z budownictwem wodnym i gospodarka przestrzenną. mgr inż. Piotr Przecherski - Absolwent Wydziału Inżynierii Środowiska Politechniki Krakowskiej na kierunku Budownictwo Wodne. Od trzech lat pracownik naukowo-dydaktyczny Instytutu Inżynierii i Gospodarki Wodnej PK. Równocześnie student trzeciego roku studiów doktoranckich. W pracy badawczej skupia się przede wszystkim na tematyce badań, monitoringu i kontroli zbiorników retencyjnych. Podczas pracy w IIGW uczestniczył w projekcie: Zintegrowany system wspomagający zarządzaniem i ochroną zbiornika zaporowego (ZiZOZap). Autorzy koncepcji zastosowania i działania zdalnej platformy badawczej określanej jako pływający dron. Zdobywcy II miejsca w konkursie Małopolski Inkubator Pomysłowości w roku Wyróżnieni w konkursach: Najważniejsze naukowe osiągnięcie roku 2013 magazynu Focus oraz Polski wynalazek 2014 organizowany przez Telewizję Polską.

3 Plan prezentacji Część pierwsza Tworzenie map BATYMETRYCZNYCH Tworzenie map ukształtowania dna zbiorników i cieków wodnych Obecnie stosowane urządzenia i techniki pomiarowe Zastosowanie urządzenia UPP-1E do pomiarów batymetrycznych Opis konstrukcji UPP-1E Plany rozwoju urządzenia Część druga Obliczanie PRZEPŁYWU w rzekach Przedstawienie urządzenia ADCP River Surveyor M9 firmy Sontek Opis działania urządzenia Zastosowanie urządzenia do pomiarów przepływów w rzece Wisła w Krakwie PODSUMOWANIE

4 BATYMETRIA: UNIWERSALNA PŁYWAJĄCA PLATFORMA POMIAROWA UPP-1E Część I

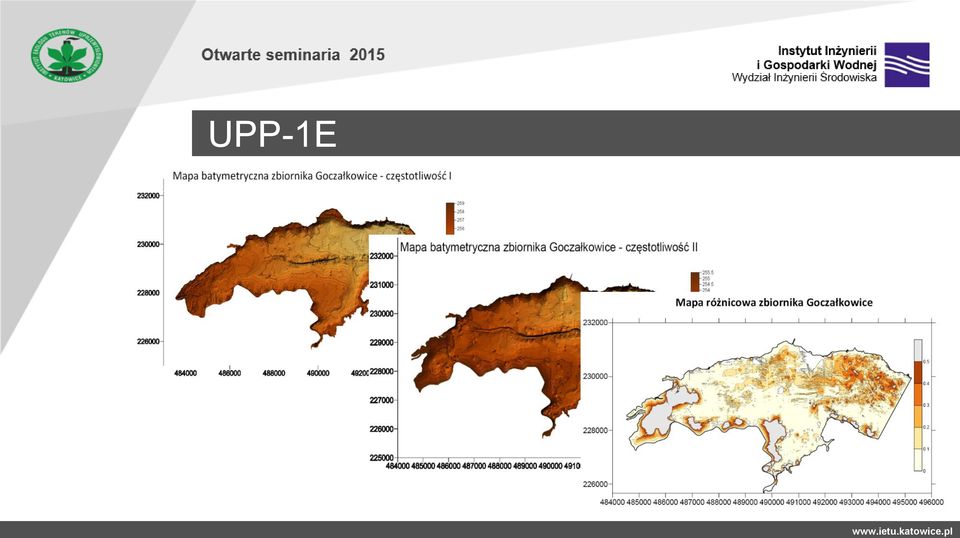
5 Zastosowanie UPP-1E Podstawowym zadaniem urządzenia UPP-1E jest wykonywanie badań ukształtowania dna zbiorników wodnych jezior naturalnych, sztucznych i cieków.

6 Zastosowanie UPP-1E Znajomość ukształtowania dna zbiorników jest potrzebne dla prowadzenia prawidłowej gospodarki wodnej na tych zbiornikach. Wezbrania i powodzie powodują zmniejszenie się wielkości tych zbiorników, czasem bardzo znaczną.

7 Zastosowanie UPP-1E Służy również do tworzenia podstawowych opracowań i projektów służących do budowy i eksploatacji zbiorników.


8 Zastosowanie UPP-1E Jest to potrzebne zarówno dla obiektów istniejących jak i projektowanych, na różnych etapach procesu inwestycyjnego (od koncepcji po ostateczny projekt wykonawczy).

9 Jak się to robiło dotychczas? Pomiary batymetryczne (ukształtowania dna zbiorników retencyjnych) były i są nadal wykonywane za pomocą echosondy zamontowanej na łodzi z załogą, dodatkowo wyposażona jest w odbiornik GPS. satelity systemu GPS antena odbiorcza systemu GPS antena odbiorcza systemu GPS wiązka ultradźwięków z echosondy pomiarowej

10 Jak się to robiło dotychczas? Dane pochodzące z analizy podkładów mapowych (uzyskane przed budową zbiornika) są w wielu przypadkach obarczone bardzo znaczącymi błędami. Objętość zbiornika obliczona na podstawie tych danych może być niedoszacowana (błąd nawet >20% prawdziwej objętości) wg. mapy wg. pomiaru geodezyjnego

11 Jak się to robiło dotychczas? Do wykonywania pomiarów potrzebny był co najmniej mały kuter z kilkuosobową załogą.

12 Jak się to robiło dotychczas? Zwykle jednak wykorzystywane jednostki są znacznie większe

13 Jak się to robiło dotychczas? Lub zupełnie do tego celu nieprzystosowane

14 Jak się to robiło dotychczas? Praktycznie prowadzi do wielu komplikacji, związanych z sama wielkością łodzi, trudnym jej transportem i wodowaniem, pracą w często trudnych warunkach atmosferycznych, falowaniem.

15 UPP-1E Urządzeniem, które pozbawione jest wyżej wymienionych wad jest UPP-1E. Może ono wykonywać badania znacznie taniej i szybciej, osiągając również wyższą dokładność i powtarzalność wyników.

16 UPP-1E Podstawowe założenia przy konstrukcji UPP-1E: Urządzenie ma efektywnie wykonywać zadania, czas działania nie mniej niż ok. 8h. Urządzenie musi być niezawodne. Prowadzi do redundantności, czyli dublowania działania większości podstawowych systemów. Musi być łatwe w użytkowaniu, nawet dla niewprawnego użytkownika.

17 UPP-1E Platforma wyposażona jest w: system pomiarowy: echosondę Reason NaviSound 215 (dwuczęstotliwościową). system nawigacji: odbiornik GPS firmy Garmin. Sygnał z tego urządzenia jest dostarczany bezpośrednio do jednostki centralnej echosondy a następnie łączony z odczytem głębokości i przekazywany do centralnego komputera. system napędowy i układ sterowania - składa się z jednostki sterującej silnikiem elektrycznym i śrubą napędową, komputera sterującego. system komunikacji ze stacją bazową systemów pomocniczych

18 UPP-1E Praca echosondy opierająca się na dwóch częstotliwościach pomiarowych, pozwala na bezpośrednie określenie również grubości osadów zalegających na dnie zbiornika.

19 UPP-1E
20 UPP-1E Zastosowanie wydajnego napędu elektrycznego pozwala na długą pracę (>8 h) bez konieczności ładowania akumulatorów. Silnik jest cichy, lecz efektywny.

21 UPP-1E
22 UPP-1E
23 UPP-1E Zastosowane oprogramowanie pozwala na pracę w trzech trybach: tryb ręczny (zdalne sterowanie) tryb automatyczny (według zadanej ścieżki pływania) tryb autonomiczny (w początkowej fazie rozwoju, obecnie zaimplementowana jest wyłącznie funkcja wracaj do domu ).
24 UPP-1E Bardzo małe zanurzenie pozwala na dodarcie do rejonów dotychczas całkowicie niedostępnych do wykonywania jakichkolwiek pomiarów.
25 UPP-1E Jest to urządzenie bezzałogowe. Umożliwia prowadzenie pracy w sytuacjach, gdy jest ona bardzo trudna, lub niebezpieczna.
26 UPP-1E Prędkość wody > 3 m/s!
27 UPP-1E UPP-1E jest urządzeniem uniwersalnym, po zmianie zainstalowanego wyposażenia można również: pobierać próbki wody do dalszej analizy, ustalać prędkość wody i przepływ za pomocą sondy ADCP (kolejny rozdział), wykonywać obrazy dna za pomocą sonaru bocznego.
28 UPP-1E co dalej? Urządzenie pod nazwą UPP-1E (Uniwersalna Platforma Pomiarowa z echosondą jednowiązkową) w swojej obecnej formie została opracowana przez pracowników Instytutu Inżynierii i Gospodarki Wodnej PK na podstawie doświadczeń przy wykonywaniu badań batymetrycznych (ukształtowania dna) rzek i zbiorników wodnych. Jest ona zdolna do wykonywania zadań zgodnych ze swoim przeznaczeniem, jednakże istnieje kilka problemów, które należy rozwiązać, aby osiągnęła ona swoją docelową użyteczność.
29 UPP-1E co dalej? 1. Kwestia stateczności podczas wykonywania pracy. Jest to najtrudniejszy problem do rozwiązania. Niewielka łódź jest w porównaniu do większych obiektów pływających (przy wykorzystaniu których zwykle prowadzi się tego rodzaju badania) znacznie bardziej podatna na falowanie wody. Aby pokonać tę trudność należy: Zastosować bierne mechaniczne sposoby redukcji wpływu falowania na urządzenie, w postaci dwóch dodatkowych kadłubów (pływaków), z możliwością ich demontażu (gdy nie będą potrzebne lub w trakcie transportu). Urządzenie będzie miało formę trimaranu kadłuba głównego z wszystkimi urządzeniami i dwóch małych kadłubów stabilizujących. Te elementy są obecnie przygotowywane. Zastosować czynne mechaniczne sposoby redukcji falowania w postaci żyroskopu, stabilizującego główny kadłub urządzenia. Rozwiązanie to obecnie jest na etapie projektu wstępnego. Zastosować redukcję wpływu falowania za pomocą oprogramowania softwaru umożliwiającego nałożenie na odbierany sygnał funkcji białego szumu i odfiltrowania części zakłóceń wynikających z falowania wody. To rozwiązanie jest obecnie na etapie koncepcji.
30 UPP-1E co dalej? 2. Problem niewystarczającego wyposażenia urządzenia. W przypadku wykonywania pomiarów większych zbiorników potrzebna jest praca zdalna na dużych odległościach. W związku z ograniczeniami prawnymi związanymi z mocą nadajników dla urządzeń zdalnie sterowanych zasięg UPP-1E nie przekracza obecnie ok. 1 km. Można to ograniczenie obejść przez: zastosowanie anten kierunkowych zastosowanie nadajników pośrednich (bojek radiowych). Dodatkowym problem jest unikanie zagrożeń (kolizji). Aby to ułatwić planujemy zastosowanie radaru bliskiego zasięgu, zintegrowanego z oprogramowaniem sterującym. To rozwiązanie jest obecnie przygotowywane. Czasem występuje problem zbyt małej mocy silnika napędzającego. Należy zastosować bądź mocniejszy (większy) silnik, bądź inną śrubę napędową, bądź oba te rozwiązania łącznie.
31 UPP-1E co dalej? 3. Problemy związane z oprogramowaniem. Obecnie zainstalowane pozwala na pracę ręczną (zdalne sterowanie) oraz automatyczną, w ograniczonym zakresie (podążanie za ścieżką zapisaną w pamięci komputera sterującego). W związku ze szczupłością środków finansowych oprogramowanie to oparte jest na istniejących rozwiązaniach, czasem niedokładnie odpowiadających szczególnym wymaganiom UPP-1E. Należy wprowadzić daleko idące zmiany w oprogramowaniu, aby umożliwić również pracę w trybie autonomicznym (np. samodzielne wykonywanie przekrojów przez urządzenie, z minimalnym udziałem człowieka). W szczątkowej formie jest to obecnie już zaimplementowane poprzez dodanie do konsoli ręcznego sterowania przycisku Wracaj do domu, które powoduje przerwanie bieżącego zadania i powrót jednostki do punktu startu.
32 UPP-1E co dalej? 4. Integracja z sondą ADCP, zmiana wyposażenia. Urządzenie w obecnej postaci może wykonywać pomiary, z ograniczeniami. Dodatkowa funkcjonalność może radykalnie zwiększyć zakres możliwych do wykonania zadań (ADCP! w kolejnym rozdziale). W skali poziomu rozwoju technologii Technology Readiness Level amerykańskiej agencji NASA urządzenia w obecnym stanie jest na poziomie TRL-6: Prototype demonstration in relevant environment
33 UPP-1E co dalej?
34 Film
35 PRZEPŁYWY: PRÓBNIK ADCP RIVER SURVEYOR M9 FIRMY SONTEK Część II
36 River surveyor M9 firmy Sontek Próbnik ten przeznaczony jest do wykonywania pomiarów przepływu w rzekach i małych potokach. Dodatkowo wykonuje profil dna przy wykonywaniu pomiarów przepływu.
37 River surveyor M9 firmy Sontek Zasada działania polega na pomiarach prędkości przepływu cząsteczek zanieczyszczeń zawartych w wodzie a następnie na ich podstawie wyznaczenie pola prędkości i sumowanie pól o tak ustalonym przepływie cząstkowym.
38 River surveyor M9 firmy Sontek Prędkości cząsteczek obliczane są na podstawie pomiarów wykonywanych za pomocą kilku echosondy (kilka wiązek) oraz przy wykorzystaniu efektu Dopplera w wodzie.
39 River surveyor M9 firmy Sontek Efektem działania jest wykres układ prędkości wody w przekroju, z podziałem na poszczególne komórki.
40 River surveyor M9 firmy Sontek Wykorzystaliśmy do urządzenie do pomiarów pola prędkości (a więc i sumarycznego przepływu w przekroju) dla wezbrania na Wiśle w Krakowie w 2010 roku.

41 River surveyor M9 firmy Sontek Most Grunwaldzki na Wiśle w Krakowie
42 River surveyor M9 firmy Sontek Most Grunwaldzki na Wiśle w Krakowie
43 River surveyor M9 firmy Sontek Most Grunwaldzki na Wiśle w Krakowie
44 River surveyor M9 firmy Sontek Most Grunwaldzki na Wiśle w Krakowie
45 River surveyor M9 firmy Sontek Most Piłsudskiego na Wiśle w Krakowie

46 River surveyor M9 firmy Sontek Most Piłsudskiego na Wiśle w Krakowie
47 River surveyor M9 firmy Sontek Most Retmański (Garbaty Mostek) Na Wildze w Krakowie
48 River surveyor M9 firmy Sontek Most Retmański (Garbaty Mostek) Na Wildze w Krakowie
49 Podsumowanie Bezzałogowych pływające platformy pomiarowe pozwalają na pracę również w trudnych warunkach, w szczególności również niebezpiecznych. Możliwe jest za ich pomocą uzyskanie znacznie większej liczby danych pomiarowych, niż za pomocą łodzi załogowych. Sposób ich działania (małe zanurzenia, długa ciągła praca, mała wrażliwość na warunki atmosferyczne, dodatkowe wyposażenie) powodują, że uzyskane wyniki sa znacznie lepsze, niż z wykorzystaniem dotychczasowych metod. Wdrożenie takich urządzeń, w szczególności UPP-1E, spowoduje jakościową zmianę w zakresie i jakości uzyskiwanych danych.
50 Otwarte seminaria 2015 Dziękuję za uwagę dr inż. Andrzej Wolak
51 Instytut Ekologii Terenów Uprzemysłowionych Otwarte seminaria 2015 Seminarium było transmitowane on-line przy wykorzystaniu systemu wideokonferencyjnego zakupionego w projekcie Rozbudowa infrastruktury informatycznej gromadzenia, przetwarzania i analizy danych środowiskowych - in2in Projekt realizowany w ramach Programu Operacyjnego Innowacyjna Gospodarka i współfinansowany przez Unię Europejską z Europejskiego Funduszu Rozwoju Regionalnego
Wspomaganie zarządzania zbiornikami zaporowymi
 Konferencja Wspomaganie zarządzania zbiornikami zaporowymi Uniwersytet Śląski w Katowicach 12 lutego 2014 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu
Konferencja Wspomaganie zarządzania zbiornikami zaporowymi Uniwersytet Śląski w Katowicach 12 lutego 2014 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu
Geoportal. w zarządzaniu środowiskiem na przykładzie Zbiornika Goczałkowickiego. mgr inż. Jacek Długosz Instytut Ekologii Terenów Uprzemysłowionych
 Geoportal w zarządzaniu środowiskiem na przykładzie Zbiornika Goczałkowickiego mgr inż. Jacek Długosz Instytut Ekologii Terenów Uprzemysłowionych Cel projektu Opracowanie systemu informacyjnego bazującego
Geoportal w zarządzaniu środowiskiem na przykładzie Zbiornika Goczałkowickiego mgr inż. Jacek Długosz Instytut Ekologii Terenów Uprzemysłowionych Cel projektu Opracowanie systemu informacyjnego bazującego
CELE I ELEMENTY PLANU GOSPODAROWANIA WODĄ W LASACH. Edward Pierzgalski Zakład Ekologii Lasu
 CELE I ELEMENTY PLANU GOSPODAROWANIA WODĄ W LASACH Edward Pierzgalski Zakład Ekologii Lasu ZAKRES PREZENTACJI 1.Wprowadzenie 2.Informacja o projekcie : Metodyczne podstawy opracowywania i wdrażania planu
CELE I ELEMENTY PLANU GOSPODAROWANIA WODĄ W LASACH Edward Pierzgalski Zakład Ekologii Lasu ZAKRES PREZENTACJI 1.Wprowadzenie 2.Informacja o projekcie : Metodyczne podstawy opracowywania i wdrażania planu
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i
 Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
W OPARCIU JEDNOWIĄZKOWY SONDAŻ HYDROAKUSTYCZNY
 TWORZENIE MODELU DNA ZBIORNIKA WODNEGO W OPARCIU O JEDNOWIĄZKOWY SONDAŻ HYDROAKUSTYCZNY Tomasz Templin, Dariusz Popielarczyk Katedra Geodezji Satelitarnej i Nawigacji Uniwersytet Warmińsko Mazurski w Olsztynie
TWORZENIE MODELU DNA ZBIORNIKA WODNEGO W OPARCIU O JEDNOWIĄZKOWY SONDAŻ HYDROAKUSTYCZNY Tomasz Templin, Dariusz Popielarczyk Katedra Geodezji Satelitarnej i Nawigacji Uniwersytet Warmińsko Mazurski w Olsztynie
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
 Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
Zbiornik Goczałkowicki doświadczenia w zarządzaniu
 Zbiornik Goczałkowicki doświadczenia w zarządzaniu Andrzej Siudy, Kierownik Zbiornika Zaporowego w Goczałkowicach Górnośląskie Przedsiębiorstwo Wodociągów SA w Katowicach Projekt współfinansowany ze środków
Zbiornik Goczałkowicki doświadczenia w zarządzaniu Andrzej Siudy, Kierownik Zbiornika Zaporowego w Goczałkowicach Górnośląskie Przedsiębiorstwo Wodociągów SA w Katowicach Projekt współfinansowany ze środków
Mapy zagrożenia powodziowego od strony morza
 Mapy zagrożenia powodziowego od strony morza Wyniki - Centrum Modelowania Powodzi i Suszy w Gdyni Monika Mykita IMGW PIB Oddział Morski w Gdyni 28.11.2012 r. Obszar działania CMPiS w Gdyni Obszar działania
Mapy zagrożenia powodziowego od strony morza Wyniki - Centrum Modelowania Powodzi i Suszy w Gdyni Monika Mykita IMGW PIB Oddział Morski w Gdyni 28.11.2012 r. Obszar działania CMPiS w Gdyni Obszar działania
Partnerstwo we wdrażaniu innowacyjnych metod zarządzania środowiskiem
 Panel ekspertów Partnerstwo we wdrażaniu innowacyjnych metod zarządzania środowiskiem Uniwersytet Śląski w Katowicach 16 stycznia 2013 Wprowadzenie Prof. dr hab. Paweł Migula Koordynator Projektu POIG
Panel ekspertów Partnerstwo we wdrażaniu innowacyjnych metod zarządzania środowiskiem Uniwersytet Śląski w Katowicach 16 stycznia 2013 Wprowadzenie Prof. dr hab. Paweł Migula Koordynator Projektu POIG
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015 Kierunek studiów: Inżynieria Środowiska
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015 Kierunek studiów: Inżynieria Środowiska
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2016/2017
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 016/017 Kierunek studiów: Budownictwo Profil:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 016/017 Kierunek studiów: Budownictwo Profil:
Zintegrowany system monitoringu stanu środowiska w procesach poszukiwania i eksploatacji gazu z łupków
 8 października 2013, POZNAŃ Zintegrowany system monitoringu stanu środowiska w procesach poszukiwania i eksploatacji gazu z łupków prof. Jarosław Arabas, prof. Jarosław Mizera, dr hab. Jerzy Weremczuk
8 października 2013, POZNAŃ Zintegrowany system monitoringu stanu środowiska w procesach poszukiwania i eksploatacji gazu z łupków prof. Jarosław Arabas, prof. Jarosław Mizera, dr hab. Jerzy Weremczuk
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Wyjaśnić praktyczne zagadnienia tworzenia cyfrowej mapy dna
 C1 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: HYDROGRAFIA. Kod przedmiotu: HA. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: hydrografia 6. Dział:
C1 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: HYDROGRAFIA. Kod przedmiotu: HA. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego 4. Kierunek: Nawigacja 5. Specjalność: hydrografia 6. Dział:
Krótkofalowcy tworzą wspierającą sieć radiowej łączności kryzysowej w rejonie Beskidów. Beskid Śląski, Żywiecki i Mały
 Krótkofalowcy tworzą wspierającą sieć radiowej łączności kryzysowej w rejonie Beskidów Beskid Śląski, Żywiecki i Mały Realizujemy projekt Beskidzka Sieć Ratunkowa finansowany z Programu Fundusz Inicjatyw
Krótkofalowcy tworzą wspierającą sieć radiowej łączności kryzysowej w rejonie Beskidów Beskid Śląski, Żywiecki i Mały Realizujemy projekt Beskidzka Sieć Ratunkowa finansowany z Programu Fundusz Inicjatyw
XI Seminarium Naukowe "Inżynierskie zastosowania technologii informatycznych"
 XI Seminarium Naukowe "Inżynierskie zastosowania technologii informatycznych" W dniu 4.02.2017 odbyło się XI Seminarium Naukowe Inżynierskie zastosowania technologii informatycznych. Organizatorzy Zaoczne
XI Seminarium Naukowe "Inżynierskie zastosowania technologii informatycznych" W dniu 4.02.2017 odbyło się XI Seminarium Naukowe Inżynierskie zastosowania technologii informatycznych. Organizatorzy Zaoczne
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 201/2015 Kierunek studiów: Inżynieria Środowiska
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 201/2015 Kierunek studiów: Inżynieria Środowiska
Wyznaczanie obszarów zagrożonych powodzią - realizacja założeń Dyrektywy Powodziowej w ramach projektu ISOK. Monika Mykita
 Wyznaczanie obszarów zagrożonych powodzią - realizacja założeń Dyrektywy Powodziowej w ramach projektu ISOK. Monika Mykita 13.04.2012 Główne zadania Centrum Modelowania Powodziowego w ramach projektu ISOK
Wyznaczanie obszarów zagrożonych powodzią - realizacja założeń Dyrektywy Powodziowej w ramach projektu ISOK. Monika Mykita 13.04.2012 Główne zadania Centrum Modelowania Powodziowego w ramach projektu ISOK
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 014/015 Kierunek studiów: Budownictwo Profil:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 014/015 Kierunek studiów: Budownictwo Profil:
KATEDRA GEOMATYKI GEODEZJI I GOSPODARKI PRZESTRZENNEJ WDROŻONE PRACE BADAWCZE
 Wydział Budownictwa i Inżynierii Środowiska KATEDRA GEOMATYKI GEODEZJI I GOSPODARKI PRZESTRZENNEJ WDROŻONE PRACE BADAWCZE Główne kierunki działalności naukowo-badawczej W ciągu ostatnich 10 lat prace badawczo-wdrożeniowe
Wydział Budownictwa i Inżynierii Środowiska KATEDRA GEOMATYKI GEODEZJI I GOSPODARKI PRZESTRZENNEJ WDROŻONE PRACE BADAWCZE Główne kierunki działalności naukowo-badawczej W ciągu ostatnich 10 lat prace badawczo-wdrożeniowe
Zbigniew Figiel, Piotr Dzikowicz. Skanowanie 3D przy projektowaniu i realizacji inwestycji w Koksownictwie KOKSOPROJEKT
 1 Zbigniew Figiel, Piotr Dzikowicz Skanowanie 3D przy projektowaniu i realizacji inwestycji w Koksownictwie 2 Plan prezentacji 1. Skanowanie laserowe 3D informacje ogólne; 2. Proces skanowania; 3. Proces
1 Zbigniew Figiel, Piotr Dzikowicz Skanowanie 3D przy projektowaniu i realizacji inwestycji w Koksownictwie 2 Plan prezentacji 1. Skanowanie laserowe 3D informacje ogólne; 2. Proces skanowania; 3. Proces
Opis przedmiotu zamówienia
 Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Marine Technology Sp. z o.o. Badania naukowe i prace badawczo-rozwojowe w dziedzinie nauk przyrodniczych i technicznych. Siedziba: 71-248 Szczecin, ul. Klonowica 37 lok. 5 KRS 0000237490 Oddział: Technopark
Algorytmy optymalizacji systemu ICT wspomagające zarządzanie siecią wodociągową
 Katowice GPW 2014 Algorytmy optymalizacji systemu ICT wspomagające zarządzanie siecią wodociągową Jan Studziński 1 1. Wstęp Cel projektu Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Katowice GPW 2014 Algorytmy optymalizacji systemu ICT wspomagające zarządzanie siecią wodociągową Jan Studziński 1 1. Wstęp Cel projektu Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Profil Marine Technology
 Marine Technology Sp. z o.o. Badania naukowe i prace rozwojowe w dziedzinie nauk przyrodniczych i technicznych Andrzej Stateczny a.stateczny@marinetechnology.pl www.marinetechnology.pl Profil Marine Technology
Marine Technology Sp. z o.o. Badania naukowe i prace rozwojowe w dziedzinie nauk przyrodniczych i technicznych Andrzej Stateczny a.stateczny@marinetechnology.pl www.marinetechnology.pl Profil Marine Technology
dr inż. Marek Zawilski, prof. P.Ł.
 UŻYTKOWANIE I OCHRONA ŚRODOWISKA W STRATEGII ZRÓWNOWAŻONEGO ROZWOJU Ograniczenie emisji zanieczyszczeń z terenów zurbanizowanych do środowiska PROBLEMY OBLICZANIA PRZEPŁYWÓW MAKSYMALNYCH PRAWDOPODOBNYCH
UŻYTKOWANIE I OCHRONA ŚRODOWISKA W STRATEGII ZRÓWNOWAŻONEGO ROZWOJU Ograniczenie emisji zanieczyszczeń z terenów zurbanizowanych do środowiska PROBLEMY OBLICZANIA PRZEPŁYWÓW MAKSYMALNYCH PRAWDOPODOBNYCH
KOMPUTEROWE SYSTEMY POMIAROWE
 KOMPUTEROWE SYSTEMY POMIAROWE Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST - ITE Semestr zimowy Wykład nr 8 Prawo autorskie Niniejsze
KOMPUTEROWE SYSTEMY POMIAROWE Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST - ITE Semestr zimowy Wykład nr 8 Prawo autorskie Niniejsze
Ogólna charakterystyka penetrometru statycznego typu GME 100 kn/mp
 Ogólna charakterystyka penetrometru statycznego typu GME 100 kn/mp Widok ogólny penetrometru (wersja standardowa z głowicą mechaniczną) w stanie rozłożonym. Penetrometr może być wyposażony opcjonalnie
Ogólna charakterystyka penetrometru statycznego typu GME 100 kn/mp Widok ogólny penetrometru (wersja standardowa z głowicą mechaniczną) w stanie rozłożonym. Penetrometr może być wyposażony opcjonalnie
Nocne migracje ptaków i ich obserwacje za pomocą radaru ornitologicznego
 Nocne migracje ptaków i ich obserwacje za pomocą radaru ornitologicznego Marek Ksepko Krzysztof Gajko Źródło: Swiss birdradar The history http://www.swiss-birdradar.com 3BirdRadarSystem detekcja obiektów
Nocne migracje ptaków i ich obserwacje za pomocą radaru ornitologicznego Marek Ksepko Krzysztof Gajko Źródło: Swiss birdradar The history http://www.swiss-birdradar.com 3BirdRadarSystem detekcja obiektów
DOKUMENT INFORMACYJNY. Swiftsky
 DOKUMENT INFORMACYJNY Kim jesteśmy? Swi sky jest projektem rozwijanym pod skrzydłami Akademickiego Inkubatora Przedsiębiorczości Politechniki Poznańskiej. Naszym celem jest rozwój i prawdziwa autonomia
DOKUMENT INFORMACYJNY Kim jesteśmy? Swi sky jest projektem rozwijanym pod skrzydłami Akademickiego Inkubatora Przedsiębiorczości Politechniki Poznańskiej. Naszym celem jest rozwój i prawdziwa autonomia
ŁÓDKA ZANĘTOWA XJET XXL LI-ION 26AH Z ALL IN ONE (GPS, AUTOPILOT, ECHOSONDA, GOOGLE MAPS, DANE BATYMETRYCZNE)
") ŁÓDKA ZANĘTOWA XJET XXL LI-ION 26AH Z ALL IN ONE (GPS, AUTOPILOT, ECHOSONDA, GOOGLE MAPS, DANE BATYMETRYCZNE) Łódka zanętowa do wywózki zanęty oraz zestawów model XJET XXL Li-Ion 26Ah z ALL IN ONE (GPS,
ŁÓDKA ZANĘTOWA XJET XXL LI-ION 26AH Z ALL IN ONE (GPS, AUTOPILOT, ECHOSONDA, GOOGLE MAPS, DANE BATYMETRYCZNE) Łódka zanętowa do wywózki zanęty oraz zestawów model XJET XXL Li-Ion 26Ah z ALL IN ONE (GPS,
BADANIA SYMULACYJNE WPŁYWU NA WARUNKI HYDRODYNAMICZNE W ZBIORNIKU RETENCYJNYM PORĄBKA
 Instytut Inżynierii i Gospodarki Wodnej Politechnika Krakowska BADANIA SYMULACYJNE WPŁYWU ELEKTROWNI SZCZYTOWOSZCZYTOWO- POMPOWEJ NA WARUNKI HYDRODYNAMICZNE W ZBIORNIKU RETENCYJNYM PORĄBKA autor: Magdalena
Instytut Inżynierii i Gospodarki Wodnej Politechnika Krakowska BADANIA SYMULACYJNE WPŁYWU ELEKTROWNI SZCZYTOWOSZCZYTOWO- POMPOWEJ NA WARUNKI HYDRODYNAMICZNE W ZBIORNIKU RETENCYJNYM PORĄBKA autor: Magdalena
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 014/015 Kierunek studiów: Inżynieria Wzornictwa Przemysłowego
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 014/015 Kierunek studiów: Inżynieria Wzornictwa Przemysłowego
Zintegrowana strategia zrównoważonego zarządzania wodami w zlewni
 Zintegrowana strategia zrównoważonego zarządzania wodami w zlewni Projekt finansowany ze środków funduszy norweskich, w ramach programu Polsko-Norweska Współpraca Badawcza realizowanego przez Narodowe
Zintegrowana strategia zrównoważonego zarządzania wodami w zlewni Projekt finansowany ze środków funduszy norweskich, w ramach programu Polsko-Norweska Współpraca Badawcza realizowanego przez Narodowe
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 014/015 Kierunek studiów: Budownictwo Profil:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 014/015 Kierunek studiów: Budownictwo Profil:
System Automatycznej Identyfikacji. Automatic Identification System (AIS)
") System Automatycznej Identyfikacji Automatic Identification System (AIS) - 2 - Systemy GIS wywodzą się z baz danych umożliwiających generację mapy numerycznej i bez względu na zastosowaną skalę mapy wykonują
System Automatycznej Identyfikacji Automatic Identification System (AIS) - 2 - Systemy GIS wywodzą się z baz danych umożliwiających generację mapy numerycznej i bez względu na zastosowaną skalę mapy wykonują
Wykorzystanie technik sonarograficznych do mapowania rzek. i zbiorników wodnych oraz do analiz ekosystemów wodnych
 Wykorzystanie technik sonarograficznych do mapowania rzek i zbiorników wodnych oraz do analiz ekosystemów wodnych Cezary Karpiński Bartosz Łozowski Część I Amatorskie urządzenia sonarowe w zastosowaniach
Wykorzystanie technik sonarograficznych do mapowania rzek i zbiorników wodnych oraz do analiz ekosystemów wodnych Cezary Karpiński Bartosz Łozowski Część I Amatorskie urządzenia sonarowe w zastosowaniach
Wspomaganie zarządzania zbiornikami zaporowymi
 Konferencja Wspomaganie zarządzania zbiornikami zaporowymi Uniwersytet Śląski w Katowicach 12 lutego 2014 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu
Konferencja Wspomaganie zarządzania zbiornikami zaporowymi Uniwersytet Śląski w Katowicach 12 lutego 2014 Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu
SYSTEM HYDROGRAFICZNY RZGW W SZCZECINIE
 SYSTEM HYDROGRAFICZNY RZGW W SZCZECINIE. GROMADZENIE, PRZETWARZANIE ORAZ WIZUALIZACJA CIĄGŁEJ INFORMACJI BATYMETRYCZNEJ RZEKI ODRY KRZYSZTOF IWAN, TOMASZ ZAWADZKI REGIONALNY ZARZĄD GOSPODARKI WODNEJ W
SYSTEM HYDROGRAFICZNY RZGW W SZCZECINIE. GROMADZENIE, PRZETWARZANIE ORAZ WIZUALIZACJA CIĄGŁEJ INFORMACJI BATYMETRYCZNEJ RZEKI ODRY KRZYSZTOF IWAN, TOMASZ ZAWADZKI REGIONALNY ZARZĄD GOSPODARKI WODNEJ W
1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
 SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
System informatyczny i bazy danych dla projektu ZiZOZap i jego beneficjentów
 System informatyczny i bazy danych dla projektu ZiZOZap i jego beneficjentów Jacek Długosz Instytut Ekologii Terenów Uprzemysłowionych w Katowicach 1 Cel Systemu ZiZOZap W ramach projektu ZiZOZap zostanie
System informatyczny i bazy danych dla projektu ZiZOZap i jego beneficjentów Jacek Długosz Instytut Ekologii Terenów Uprzemysłowionych w Katowicach 1 Cel Systemu ZiZOZap W ramach projektu ZiZOZap zostanie
Lódzki Wojewódzki Inspektorat Ochrony Srodowiska PROGRAM PANSTWOWEGO MONITORINGU,, SRODOWISKA WOJEWODZTW A LÓDZKIEGO na lata
 Lódzki Wojewódzki Inspektorat Ochrony Srodowiska PROGRAM PANSTWOWEGO MONITORINGU,, SRODOWISKA WOJEWODZTW A LÓDZKIEGO na lata 2010-2012 Przedkladam Piotr MaKS Wojewódzki Inspektor Ochrony Srodowiska :guslewlcz
Lódzki Wojewódzki Inspektorat Ochrony Srodowiska PROGRAM PANSTWOWEGO MONITORINGU,, SRODOWISKA WOJEWODZTW A LÓDZKIEGO na lata 2010-2012 Przedkladam Piotr MaKS Wojewódzki Inspektor Ochrony Srodowiska :guslewlcz
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2016/2017
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2016/2017 Kierunek studiów: Budownictwo Profil:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2016/2017 Kierunek studiów: Budownictwo Profil:
WSPÓŁPRACA NAUKA PRZEMYSŁ
 Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
(12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1
 OPIS PATENTOWY (19) PL (11) 180337 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 319308 (22) Data zgłoszenia: 06.09.1995 (86) Data i numer zgłoszenia
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 319308 (22) Data zgłoszenia: 06.09.1995 (86) Data i numer zgłoszenia
System informacji o szlakach turystycznych Mazowsza
 System informacji o szlakach turystycznych Mazowsza Mateusz Troll Instytut Geografii i Gospodarki Przestrzennej UJ Tomasz Gacek GISonLine S.C. Plan prezentacji 1. Informacje o projekcie 2. Składowe systemu
System informacji o szlakach turystycznych Mazowsza Mateusz Troll Instytut Geografii i Gospodarki Przestrzennej UJ Tomasz Gacek GISonLine S.C. Plan prezentacji 1. Informacje o projekcie 2. Składowe systemu
INSTYSTU INŻYNIERII I GOSPODARKI WODNEJ Proponowane tematy prac dyplomowych
 INSTYSTU INŻYNIERII I GOSPODARKI WODNEJ Proponowane tematy prac dyplomowych dr inż. Andrzej POTOCKI 1. Opracowanie algorytmu i wykonanie bilansu wodnego wybranego zbiornika retencyjnego. 2. Rola energetyki
INSTYSTU INŻYNIERII I GOSPODARKI WODNEJ Proponowane tematy prac dyplomowych dr inż. Andrzej POTOCKI 1. Opracowanie algorytmu i wykonanie bilansu wodnego wybranego zbiornika retencyjnego. 2. Rola energetyki
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015 Kierunek studiów: Gospodarka przestrzenna
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015 Kierunek studiów: Gospodarka przestrzenna
ruchem kolejowym przydatną w rozwiązywaniu złożonych zadań.
 Efekty uczenia się (poprzednio: efekty ) dla studiów drugiego stopnia profil ogólnoakademicki na kierunku Budowa i Eksploatacja nfrastruktury Transportu Szynowego Wydział nżynierii Lądowej i Wydział Transportu
Efekty uczenia się (poprzednio: efekty ) dla studiów drugiego stopnia profil ogólnoakademicki na kierunku Budowa i Eksploatacja nfrastruktury Transportu Szynowego Wydział nżynierii Lądowej i Wydział Transportu
24.06.2015. Sprawozdanie z przedsięwzięcia "Budowa ekologicznego pojazdu zasilanego ogniwem paliwowym." WFOŚ/D/201/54/2015
 24.06.2015 Sprawozdanie z przedsięwzięcia "Budowa ekologicznego pojazdu zasilanego ogniwem paliwowym." WFOŚ/D/201/54/2015 1. Opis ogólny Wszystkie osoby mające możliwość obejrzenia pojazdu zostały poinformowane
24.06.2015 Sprawozdanie z przedsięwzięcia "Budowa ekologicznego pojazdu zasilanego ogniwem paliwowym." WFOŚ/D/201/54/2015 1. Opis ogólny Wszystkie osoby mające możliwość obejrzenia pojazdu zostały poinformowane
lp tematy pracy promotor dyplomant data otrzymania tematu uwagi ZAKŁAD URZĄDZEŃ NAWIGACYJNYCH
 Tematy prac dyplomowych inżynierskich dla studentów niestacjonarnych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2008/2009 lp tematy pracy promotor
Tematy prac dyplomowych inżynierskich dla studentów niestacjonarnych prowadzone przez nauczycieli akademickich Instytutu Inżynierii Ruchu Morskiego na rok akademicki 2008/2009 lp tematy pracy promotor
Analiza śladu zarejestrowanego odbiornikiem typu GPS-GIS. Eliza Maciuszek
 Analiza śladu zarejestrowanego odbiornikiem typu GPS-GIS. Eliza Maciuszek Kierunek: Inżynieria Środowiska Przedmiot: Systemy informacji przestrzennej Rok: 3 Grupa: 2 TEMAT: Charakterystyka dokładności
Analiza śladu zarejestrowanego odbiornikiem typu GPS-GIS. Eliza Maciuszek Kierunek: Inżynieria Środowiska Przedmiot: Systemy informacji przestrzennej Rok: 3 Grupa: 2 TEMAT: Charakterystyka dokładności

PRZYGOTOWANIE DANYCH HYDROLOGICZNYCH W ZAKRESIE NIEZBĘDNYM DO MODELOWANIA HYDRAULICZNEGO
 PRZYGOTOWANIE DANYCH HYDROLOGICZNYCH W ZAKRESIE NIEZBĘDNYM DO MODELOWANIA HYDRAULICZNEGO Tamara Tokarczyk, Andrzej Hański, Marta Korcz, Agnieszka Malota Instytut Meteorologii i Gospodarki Wodnej Państwowy
PRZYGOTOWANIE DANYCH HYDROLOGICZNYCH W ZAKRESIE NIEZBĘDNYM DO MODELOWANIA HYDRAULICZNEGO Tamara Tokarczyk, Andrzej Hański, Marta Korcz, Agnieszka Malota Instytut Meteorologii i Gospodarki Wodnej Państwowy
Młodzi wybitni naukowcy z PB ze stypendiami Ministra
 Młodzi wybitni naukowcy z PB ze stypendiami Ministra Dr Alicja Gudanowska i dr Danuta Szpilko z Wydziału Inżynierii Zarządzania Politechniki Białostockiej otrzymały stypendia Ministerstwa Nauka i Szkolnictwa
Młodzi wybitni naukowcy z PB ze stypendiami Ministra Dr Alicja Gudanowska i dr Danuta Szpilko z Wydziału Inżynierii Zarządzania Politechniki Białostockiej otrzymały stypendia Ministerstwa Nauka i Szkolnictwa
SINGLE-IMAGE HIGH-RESOLUTION SATELLITE DATA FOR 3D INFORMATIONEXTRACTION
 SINGLE-IMAGE HIGH-RESOLUTION SATELLITE DATA FOR 3D INFORMATIONEXTRACTION MOŻLIWOŚCI WYDOBYCIA INFORMACJI 3D Z POJEDYNCZYCH WYSOKOROZDZIELCZYCH OBRAZÓW SATELITARNYCH J. Willneff, J. Poon, C. Fraser Przygotował:
SINGLE-IMAGE HIGH-RESOLUTION SATELLITE DATA FOR 3D INFORMATIONEXTRACTION MOŻLIWOŚCI WYDOBYCIA INFORMACJI 3D Z POJEDYNCZYCH WYSOKOROZDZIELCZYCH OBRAZÓW SATELITARNYCH J. Willneff, J. Poon, C. Fraser Przygotował:
XIV Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne
 XIV Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 02.12.2016 odbyło się XIV Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy
XIV Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 02.12.2016 odbyło się XIV Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy
kierowanych pojazdów podwodnych
 Systemy wspomagające obsługę zdalnie kierowanych pojazdów podwodnych Łukasz Józefowicz, 228934 ROV, czyli zdalnie kierowane pojazdy podwodne Skrót ROV pochodzi z języka angielskiego (Remotely Operated
Systemy wspomagające obsługę zdalnie kierowanych pojazdów podwodnych Łukasz Józefowicz, 228934 ROV, czyli zdalnie kierowane pojazdy podwodne Skrót ROV pochodzi z języka angielskiego (Remotely Operated
Moduł meteorologiczny w serwisie CRIS
 Zintegrowana strategia zrównoważonego zarządzania wodami w zlewni Moduł meteorologiczny w serwisie CRIS Czesław Kliś Instytut Ekologii Terenów Uprzemysłowionych Projekt finansowany ze środków funduszy
Zintegrowana strategia zrównoważonego zarządzania wodami w zlewni Moduł meteorologiczny w serwisie CRIS Czesław Kliś Instytut Ekologii Terenów Uprzemysłowionych Projekt finansowany ze środków funduszy
Nowoczesna sieć FTTH, czyli światłowód w każdym domu
 Nowoczesna sieć FTTH, czyli światłowód w każdym domu PROJEKT WSPÓŁFINANSOWANY PRZEZ UNIĘ EUROPEJSKĄ Z EUROPEJSKIEGO FUNDUSZU ROZWOJU REGIONALNEGO W RAMACH PROGRAMU OPERACYJNEGO INNOWACYJNA GOSPODARKA 2007-2013.
Nowoczesna sieć FTTH, czyli światłowód w każdym domu PROJEKT WSPÓŁFINANSOWANY PRZEZ UNIĘ EUROPEJSKĄ Z EUROPEJSKIEGO FUNDUSZU ROZWOJU REGIONALNEGO W RAMACH PROGRAMU OPERACYJNEGO INNOWACYJNA GOSPODARKA 2007-2013.
OCHRONA PRZECIWPOWODZIOWA W WOJEWÓDZTWACH MAŁOPOLSKIM I ŚWIĘTOKRZYSKIM
 OCHRONA PRZECIWPOWODZIOWA W WOJEWÓDZTWACH MAŁOPOLSKIM I ŚWIĘTOKRZYSKIM Elementy zarządzania ryzykiem powodziowym 1. Zapobieganie 2. Ochrona 3. Gotowość 4. Postępowanie awaryjne 5. Wyciąganie wniosków Zarządzanie
OCHRONA PRZECIWPOWODZIOWA W WOJEWÓDZTWACH MAŁOPOLSKIM I ŚWIĘTOKRZYSKIM Elementy zarządzania ryzykiem powodziowym 1. Zapobieganie 2. Ochrona 3. Gotowość 4. Postępowanie awaryjne 5. Wyciąganie wniosków Zarządzanie
Stanowisko do badania współczynnika tarcia
 Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT. Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014
 Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Dynamiczne zarządzanie zdolnościami przesyłowymi w systemach elektroenergetycznych
 Konferencja Elektroenergetyczne linie napowietrzne i kablowe wysokich i najwyższych napięć Wisła, 18-19 października 2017 Dynamiczne zarządzanie zdolnościami przesyłowymi w systemach elektroenergetycznych
Konferencja Elektroenergetyczne linie napowietrzne i kablowe wysokich i najwyższych napięć Wisła, 18-19 października 2017 Dynamiczne zarządzanie zdolnościami przesyłowymi w systemach elektroenergetycznych
Nowe rozwiązania w układach sterowania firmy Tester
 Nowe rozwiązania w układach sterowania firmy Tester Świebodzice 05.07.2017 Firma TESTER SP. Z O.O. realizuje aktualnie projekt pt. Wprowadzenie na rynek nowoczesnych układów sterowania dzięki zastosowaniu
Nowe rozwiązania w układach sterowania firmy Tester Świebodzice 05.07.2017 Firma TESTER SP. Z O.O. realizuje aktualnie projekt pt. Wprowadzenie na rynek nowoczesnych układów sterowania dzięki zastosowaniu
Specjalizacja: Zarządzanie projektami (I)
") Specjalizacja: Zarządzanie projektami (I) Osoba koordynująca: dr inż. Tomasz Pieciukiewicz Tomasz.Pieciukiewicz1@pjwstk.edu.pl Czego uczymy. Umiejętności po ukończeniu specjalizacji. Celem specjalizacji
Specjalizacja: Zarządzanie projektami (I) Osoba koordynująca: dr inż. Tomasz Pieciukiewicz Tomasz.Pieciukiewicz1@pjwstk.edu.pl Czego uczymy. Umiejętności po ukończeniu specjalizacji. Celem specjalizacji
Ogłoszenie o zamówieniu
 Projekt współfinansowany z Europejskiego Funduszu Rozwoju Regionalnego oraz Budżetu Państwa FUNDUSZE EUROPEJSKIE DLA ROZWOJU REGIONU ŁÓDZKIEGO Zamawiający: KAWU J. Kotus A. Woźniak Spółka Jawna 91-204
Projekt współfinansowany z Europejskiego Funduszu Rozwoju Regionalnego oraz Budżetu Państwa FUNDUSZE EUROPEJSKIE DLA ROZWOJU REGIONU ŁÓDZKIEGO Zamawiający: KAWU J. Kotus A. Woźniak Spółka Jawna 91-204
STRATEGIA ROZWOJU WYDZIAŁU INŻYNIERII PRODUKCJI I LOGISTYKI DO ROKU 2020
 Politechnika Opolska Wydział Inżynierii Produkcji i Logistyki STRATEGIA ROZWOJU WYDZIAŁU INŻYNIERII PRODUKCJI I LOGISTYKI DO ROKU 2020 Opole, maj 2014 r. Krótka informacja o nas Historia Wydziału Inżynierii
Politechnika Opolska Wydział Inżynierii Produkcji i Logistyki STRATEGIA ROZWOJU WYDZIAŁU INŻYNIERII PRODUKCJI I LOGISTYKI DO ROKU 2020 Opole, maj 2014 r. Krótka informacja o nas Historia Wydziału Inżynierii
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Katowice GPW 2013. Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową. Jan Studziński
 Katowice GPW 2013 Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową Jan Studziński 1 1. Wstęp Cel pracy Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Katowice GPW 2013 Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową Jan Studziński 1 1. Wstęp Cel pracy Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Czym jest OnDynamic? OnDynamic dostarcza wartościowych danych w czasie rzeczywistym, 24/7 dni w tygodniu w zakresie: czasu przejazdu,
 Czym jest OnDynamic? OnDynamic (Multimodalny System Monitoringu Ruchu Drogowego) to inteligentna architektura czujników i specjalistycznego oprogramowania, które gwarantują przetwarzanie dużej ilości różnorodnych
Czym jest OnDynamic? OnDynamic (Multimodalny System Monitoringu Ruchu Drogowego) to inteligentna architektura czujników i specjalistycznego oprogramowania, które gwarantują przetwarzanie dużej ilości różnorodnych
Z-ID-604 Metrologia. Podstawowy Obowiązkowy Polski Semestr VI
 KARTA MODUŁU / KARTA PRZEDMIOTU Z-ID-604 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2015/2016 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
KARTA MODUŁU / KARTA PRZEDMIOTU Z-ID-604 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 2015/2016 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
Rozdział 1 Przepisy ogólne 1
 Załącznik do uchwały nr 31/d/04/2017 z 26 kwietnia 2017 r. WYTYCZNE DLA RAD WYDZIAŁÓW W ZAKRESIE ZASAD OPRACOWYWANIA PROGRAMÓW KSZTAŁCENIA STUDIÓW DOKTORANCKICH Rozdział 1 Przepisy ogólne 1 1. Uchwała
Załącznik do uchwały nr 31/d/04/2017 z 26 kwietnia 2017 r. WYTYCZNE DLA RAD WYDZIAŁÓW W ZAKRESIE ZASAD OPRACOWYWANIA PROGRAMÓW KSZTAŁCENIA STUDIÓW DOKTORANCKICH Rozdział 1 Przepisy ogólne 1 1. Uchwała
ŁÓDKA ZANĘTOWA BAITBOAT.PL TRIMARAN
 ŁÓDKA ZANĘTOWA BAITBOAT.PL TRIMARAN Łódka zanętowa do wywózki zanęty oraz zestawów model TRIMARAN Baitboat.pl. Kadłub łódki został zaprojektowany komputerowo przy użyciu programu typu CAD następnie jako
ŁÓDKA ZANĘTOWA BAITBOAT.PL TRIMARAN Łódka zanętowa do wywózki zanęty oraz zestawów model TRIMARAN Baitboat.pl. Kadłub łódki został zaprojektowany komputerowo przy użyciu programu typu CAD następnie jako
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Rodzaj studiów: stacjonarne Opracowanie koncepcji napędu głównego dla dwu-zadaniowego nawodnopodwodnego bezzałogowego pojazdu morskiego 1. Wstęp 2. Tematyka badań 3. Cel badań i zakres pracy 4. Problem
Rodzaj studiów: stacjonarne Opracowanie koncepcji napędu głównego dla dwu-zadaniowego nawodnopodwodnego bezzałogowego pojazdu morskiego 1. Wstęp 2. Tematyka badań 3. Cel badań i zakres pracy 4. Problem
Doświadczenia w eksploatacji gazomierzy ultradźwiękowych
 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych Daniel Wysokiński Mateusz Turkowski Rogów 18-20 września 2013 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych 1 Gazomierze ultradźwiękowe
Doświadczenia w eksploatacji gazomierzy ultradźwiękowych Daniel Wysokiński Mateusz Turkowski Rogów 18-20 września 2013 Doświadczenia w eksploatacji gazomierzy ultradźwiękowych 1 Gazomierze ultradźwiękowe
Z-ZIP2-119z Inżynieria Jakości Quality Engineering
 KARTA MODUŁU / KARTA PRZEDMIOTU Z-ZIP2-119z Inżynieria Jakości Quality Engineering Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 A. USYTUOWANIE MODUŁU
KARTA MODUŁU / KARTA PRZEDMIOTU Z-ZIP2-119z Inżynieria Jakości Quality Engineering Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 A. USYTUOWANIE MODUŁU
Z-ZIP-0101 Metrologia. Zarządzanie i Inżynieria Produkcji I stopień Ogólnoakademicki. Kierunkowy Obowiązkowy Polski Semestr czwarty
 KARTA MODUŁU / KARTA PRZEDMIOTU Z-ZIP-0101 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 01/013 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
KARTA MODUŁU / KARTA PRZEDMIOTU Z-ZIP-0101 Metrologia Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Metrology Obowiązuje od roku akademickiego 01/013 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
Narzędzie przyszłości dostępne już dziś
 lindab we simplify construction Narzędzie przyszłości dostępne już dziś LindabUltraLink Przełomowa technologia pomiaru przepływu i temperatury powietrza w systemie wentylacyjnym, bez straty ciśnienia 2
lindab we simplify construction Narzędzie przyszłości dostępne już dziś LindabUltraLink Przełomowa technologia pomiaru przepływu i temperatury powietrza w systemie wentylacyjnym, bez straty ciśnienia 2
Monika Ciak-Ozimek. Mapy zagrożenia powodziowego i mapy ryzyka powodziowego stan obecny i wdrażanie
 Monika Ciak-Ozimek Mapy zagrożenia powodziowego i mapy ryzyka powodziowego stan obecny i wdrażanie Informatyczny System Osłony Kraju przed nadzwyczajnymi zagrożeniami Projekt ISOK jest realizowany w ramach
Monika Ciak-Ozimek Mapy zagrożenia powodziowego i mapy ryzyka powodziowego stan obecny i wdrażanie Informatyczny System Osłony Kraju przed nadzwyczajnymi zagrożeniami Projekt ISOK jest realizowany w ramach
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Wydział Automatyki, Elektroniki i Informatyki
 Wydział Automatyki, Elektroniki i Informatyki Wydział Automatyki, Elektroniki i Informatyki Kolegium Dziekańskie Dziekan: dr hab. inż. Adam Czornik prof. nzw w Pol. Śl. Prodziekan ds. Nauki i Współpracy
Wydział Automatyki, Elektroniki i Informatyki Wydział Automatyki, Elektroniki i Informatyki Kolegium Dziekańskie Dziekan: dr hab. inż. Adam Czornik prof. nzw w Pol. Śl. Prodziekan ds. Nauki i Współpracy
System AIS. Paweł Zalewski Instytut Inżynierii Ruchu Morskiego Akademia Morska w Szczecinie
 System AIS Paweł Zalewski Instytut Inżynierii Ruchu Morskiego Akademia Morska w Szczecinie - 2 - Treść prezentacji: AIS AIS i ECDIS AIS i VTS AIS i HELCOM Podsumowanie komentarz - 3 - System AIS (system
System AIS Paweł Zalewski Instytut Inżynierii Ruchu Morskiego Akademia Morska w Szczecinie - 2 - Treść prezentacji: AIS AIS i ECDIS AIS i VTS AIS i HELCOM Podsumowanie komentarz - 3 - System AIS (system
ŁÓDKA ZANĘTOWA XJET XXL Z ECHOSONDĄ LOWRANCE HOOK2 4X
 ŁÓDKA ZANĘTOWA XJET XXL Z ECHOSONDĄ LOWRANCE HOOK2 4X Łódka zanętowa do wywózki zanęty oraz zestawów model XJET XXL z echosondą LOWRANCE HOOK2 4X. Kadłub łódki został zaprojektowany komputerowo przy użyciu
ŁÓDKA ZANĘTOWA XJET XXL Z ECHOSONDĄ LOWRANCE HOOK2 4X Łódka zanętowa do wywózki zanęty oraz zestawów model XJET XXL z echosondą LOWRANCE HOOK2 4X. Kadłub łódki został zaprojektowany komputerowo przy użyciu
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia III. Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
Adam Ludwikowski Mazowiecki Wojewódzki Inspektor Ochrony Środowiska w Warszawie Warszawa 13 grudzień 2011r.
 Wpływ na środowisko wysokiego stężenia odprowadzanych do rzek substancji oraz zawartości tlenu w wodzie przy obecnej sytuacji hydrologicznej Adam Ludwikowski Mazowiecki Wojewódzki Inspektor Ochrony Środowiska
Wpływ na środowisko wysokiego stężenia odprowadzanych do rzek substancji oraz zawartości tlenu w wodzie przy obecnej sytuacji hydrologicznej Adam Ludwikowski Mazowiecki Wojewódzki Inspektor Ochrony Środowiska
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015 Kierunek studiów: Inżynieria Środowiska
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 2014/2015 Kierunek studiów: Inżynieria Środowiska
KIERUNKOWE EFEKTY KSZTAŁCENIA
 Załącznik do uchwały Senatu PK nr 14/d/03/2017 z dnia 22 marca 2017 r. Politechnika Krakowska im. Tadeusza Kościuszki w Krakowie Nazwa wydziału lub wydziałów: Wydział Architektury, Wydział Inżynierii Lądowej,
Załącznik do uchwały Senatu PK nr 14/d/03/2017 z dnia 22 marca 2017 r. Politechnika Krakowska im. Tadeusza Kościuszki w Krakowie Nazwa wydziału lub wydziałów: Wydział Architektury, Wydział Inżynierii Lądowej,
ORTOFOTOMAPY. - cena od: 600zł / 0.5ha
 ORTOFOTOMAPY - zastosowanie: dokumentacja postępu prac, pomiary i analizy odległości dużych powierchni terenu, analizy zmian terenu oraz planowanie monitorowanie inwestycji. - rozmiar piksela od 2 cm.
ORTOFOTOMAPY - zastosowanie: dokumentacja postępu prac, pomiary i analizy odległości dużych powierchni terenu, analizy zmian terenu oraz planowanie monitorowanie inwestycji. - rozmiar piksela od 2 cm.
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
7. Uwarunkowania finansowe realizacji wojewódzkiego programu PMŚ
 7. Uwarunkowania finansowe realizacji wojewódzkiego programu PMŚ Realizacja Programu Państwowego Monitoringu Środowiska województwa łódzkiego na lata 2016-2020 w pełnym zakresie będzie uwarunkowana dostępnością
7. Uwarunkowania finansowe realizacji wojewódzkiego programu PMŚ Realizacja Programu Państwowego Monitoringu Środowiska województwa łódzkiego na lata 2016-2020 w pełnym zakresie będzie uwarunkowana dostępnością
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA. Autor: Daniel Słowik
 Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
Badanie właściwości wysokorozdzielczych przetworników analogowo-cyfrowych w systemie programowalnym FPGA Autor: Daniel Słowik Promotor: Dr inż. Daniel Kopiec Wrocław 016 Plan prezentacji Założenia i cel
XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne
 XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 13.10.2017 odbyło się XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe
XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne W dniu 13.10.2017 odbyło się XVIII Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe
Bazy danych geologiczno-inżynierskich Państwowej Służby Geologicznej w procesie inwestycyjnym i w planowaniu przestrzennym
 Bazy danych geologiczno-inżynierskich Państwowej Służby Geologicznej w procesie inwestycyjnym i w planowaniu przestrzennym Grzegorz Ryżyński Program Bezpieczna Infrastruktura i Środowisko PIG-PIB Etapy
Bazy danych geologiczno-inżynierskich Państwowej Służby Geologicznej w procesie inwestycyjnym i w planowaniu przestrzennym Grzegorz Ryżyński Program Bezpieczna Infrastruktura i Środowisko PIG-PIB Etapy
ALISTER 9 AUTONOMICZNY POJAZD PODWODNY DO WYKRYWANIA MIN ORAZ BADANIA WARUNKÓW HYDROLOGICZNYCH
 ALISTER 9 AUTONOMICZNY POJAZD PODWODNY DO WYKRYWANIA MIN ORAZ BADANIA WARUNKÓW HYDROLOGICZNYCH Zaawansowany technologicznie robot podwodny zaprojektowany do wykrywania min morskich i do współpracy ze zdalnie
ALISTER 9 AUTONOMICZNY POJAZD PODWODNY DO WYKRYWANIA MIN ORAZ BADANIA WARUNKÓW HYDROLOGICZNYCH Zaawansowany technologicznie robot podwodny zaprojektowany do wykrywania min morskich i do współpracy ze zdalnie
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów