Leonardo da Vinci artysta i wynalazca. Józef Salwiński Katedra Konstrukcji i Eksploatacji Maszyn kademia Górniczo-Hutnicza
|
|
|
- Krystyna Kucharska
- 7 lat temu
- Przeglądów:
Transkrypt
1 Leonardo da Vinci artysta i wynalazca Józef Salwiński Katedra Konstrukcji i Eksploatacji Maszyn kademia Górniczo-Hutnicza 1

2 2

3 Katedra Santa Maria del Fiore jest do chwili obecnej najwyższym budynkiem we Florencji 3

4 Fresk w mediolańskim kościele Santa Maria del le Grazje

5 Mona Lisa (Lisa Gheradini) Luwr 5

6 Studium ludzkiego ciała 6
7 Wydaje mi się, że te nauki, których źródło nie leży w doświadczeniu, matce pewności i które nie kończą się na doświadczeniu, to znaczy, których pochodzenie albo rozwój czy też cel nie zahaczają o żaden z pięciu zmysłów, są pełne błędów i niewarte zachodu Leonardo da Vinci

8 Był: Malarzem, architektem, filozofem, muzykiem, poetą, odkrywcą, matematykiem, konstruktorem, mechanikiem, fizykiem, anatomem, wynalazcą i geologiem. Słońce się nie porusza" 40 lat przed urodzeniem Kopernika Ciężar, który nie znajduje oporu, spadnie w dół najkrótszą drogą lat przed Newtonem. Cała ziemia musiała przybrać kształt kuli". 400 lat przed Darwinem - zaliczył człowieka do tej samej kategorii co małpy. 8

9 9
10 10

11 11

12 Rower 12
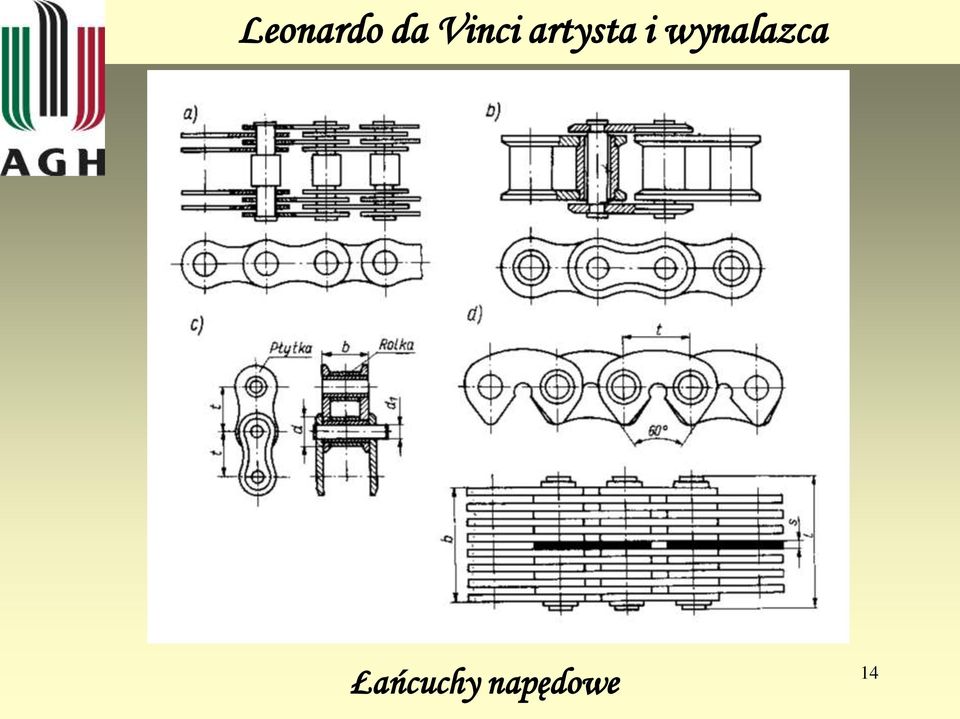
13 Przekładnie łańcuchowe są to przekładnie cięgnowe w których cięgnem jest łańcuch. Współpraca koła łańcuchowego łańcuchem następuje w wyniku kształtowego oddziaływania zębów koła na elementy łańcucha. Opatentowana w 1905 przez Szotha Bananashviliego 13

14 Łańcuchy napędowe 14
15 26 czerwca 2000 r m drewno sosnowe, lniane płótno 15

16 Różne spadochrony, różne zastosowania 16

17 17

18 18
19 19

20 20

21 21
22 Mechanizm zegarka z zespołem przekładni 22
23 Przekładnia zębata dużej mocy 140 MW 23
24 MOTOREDUKTOR NORDBLOCK 24
25 25
26 Kinematyka pracy przekładni ślimakowej 26
27 Współczesny motoreduktor ślimakowy 27
28 Ślimak walcowy Ślimak globoidalny Przekładnia ślimakowa walcowa i globoidalna 28
29 29
30 30
31 Samochodowa przekładnia różnicowa 31
32 Mięśniolot napędzany siłą 4 mężczyzn 32
33 33
34 PZL W3 Sokół Smigłowce 34 Kamow Ka 52 Aligator
35 Wirnik śmigłowca Mi
36 Czołg z urządzeniem miotającym kamienie 36
37 Najsłynniejszy czołg II wojny światowej T 34 37
38 38
39 39 Jeden z pierwszych czołgów z okresu I wojny światowej
40 Czołg wielowieżowy I wojna światowa 40
41 Rydwan bojowy żniwiarka 41
42 Czołg MARK I I wojna światowa 42
43 WSPÓŁCZESNA INŻYNIERIA MECHANICZNA AGH UNIWERSYTET OTWARTY 2010/2011 Nauka o urządzeniach i mechanizmach jest najszlachetniejszą i najbardziej ze wszystkich użyteczną, ponieważ pokazuje działanie ciał ruchomych. Przyczyna ruchu tych ciał znajduje się w środku ich ciężkości, który mieści się pomiędzy nierównymi masami po bokach tych ciał i leży w niedostatku lub nadmiarze sił, a także w działaniu dźwigni i ich przeciwwadze Leonardo da Vinci
44 URZĄDZENIA MECHATRONICZNE INTERDYSCYPLINARNY OBSZAR NAUK TECHNICZNYCH INTEGRUJĄCY: MECHANIKĘ BUDOWĘ MASZYN ELEKTROTECHNIKĘ ELEKTRONIKĘ INFORMATYKĘ 44
45 Uniwersalne urządzenie mechatroniczne - np. robot Urządzenie mechatroniczne (robot) Elementy wykonawcze (aktory) głównie elementy mechaniczne Czujniki (sensor) zdobywją informację Przetworniki informacji (procesory) elementy techniki komputerowej 45
46 46
47 47
48 48
49 Inżynieria mechaniczna jest interdyscyplinarnym obszarem wiedzy korzystającym ze zdobyczy wielu obszarów nauki. Ci którzy ją studiują mogą mieć pewność przydatności w społeczeństwie ale jednocześnie muszą być przygotowani do konieczności ciągłego rozwoju i poszerzania swojego zasobu wiedzy. 49
50 DZIĘKUJĘ ZA UWAGĘ 50
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Mechanika Ogólna General Mechanics. Inżynieria Bezpieczeństwa I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Wydział Inżynierii Wytwarzania AGH w Mielcu
 Wydział Inżynierii Wytwarzania AGH w Mielcu Dr hab. inż. Bolesław Karwat prof. nadzwyczajny Pełnomocnik Rektora AGH ds. Tworzenia Wydziału Inżynierii Wytwarzania Sekretarz Kolegium Dziekanów Wydziałów
Wydział Inżynierii Wytwarzania AGH w Mielcu Dr hab. inż. Bolesław Karwat prof. nadzwyczajny Pełnomocnik Rektora AGH ds. Tworzenia Wydziału Inżynierii Wytwarzania Sekretarz Kolegium Dziekanów Wydziałów
Mechanika Techniczna I Engineering Mechanics I. Transport I stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Maszyny proste. W razie potrzeby Edukatorzy chętnie udzielą pomocy.
 Maszyny proste Drogi Nauczycielu! Witamy serdecznie w Centrum Nauki Experyment. Przygotowana dla uczniów karta pracy zawiera pytania dotyczące stanowisk znajdujących się na sali wystawienniczej. Zadaniem
Maszyny proste Drogi Nauczycielu! Witamy serdecznie w Centrum Nauki Experyment. Przygotowana dla uczniów karta pracy zawiera pytania dotyczące stanowisk znajdujących się na sali wystawienniczej. Zadaniem
MECHANIKI. Laboratorium. Konstrukcje od 1 do 35
 5 6 7 8 9 0 5 6 7 9 0 5 6 7 8 9 0 5 Laboratorium MECHANIKI Konstrukcje od do 5 Motaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek
5 6 7 8 9 0 5 6 7 9 0 5 6 7 8 9 0 5 Laboratorium MECHANIKI Konstrukcje od do 5 Motaż dwóch belek Montaż belek z zastosowaniem dwóch gwoździ Łączenie belek Montaż trzech belek Prostopadłe złożenie belek
Rok akademicki: 2015/2016 Kod: RBM ET-n Punkty ECTS: 4. Poziom studiów: Studia II stopnia Forma i tryb studiów: Niestacjonarne
 Nazwa modułu: Budowa i eksploatacja pojazdów Rok akademicki: 2015/2016 Kod: RBM-2-105-ET-n Punkty ECTS: 4 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechanika i Budowa Maszyn Specjalność: Eksploatacja
Nazwa modułu: Budowa i eksploatacja pojazdów Rok akademicki: 2015/2016 Kod: RBM-2-105-ET-n Punkty ECTS: 4 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechanika i Budowa Maszyn Specjalność: Eksploatacja
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Zwolnice przekładnie boczne
 Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Układ napędowy - podzespoły Zwolnice przekładnie boczne opracowanie mgr inż. Ireneusz Kulczyk 2009-2012 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Schemat kinematyczny Budowa klasycznego
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego

TEORIA MASZYN MECHANIZMÓW ĆWICZENIA LABORATORYJNE Badanie struktury modeli mechanizmów w laboratorium.
 MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
Przenośnik zgrzebłowy - obliczenia
 Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Komputerowe wspomaganie projektowania III Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Komputerowe wspomaganie owania III Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Komputerowe wspomaganie owania III Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 A. USYTUOWANIE MODUŁU W SYSTEMIE STUDIÓW
PL B1. ŻBIKOWSKI JERZY, Zielona Góra, PL BUP 03/06. JERZY ŻBIKOWSKI, Zielona Góra, PL WUP 09/11 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Strona 1 PLAN STUDIÓW NA KIERUNKU TRANSPORT
 Strona 1 PLAN STUDIÓW NA KIERUNKU TRANSPORT Specjalność: Logistyka Specjalność: Transport i spedycja Specjalność: Inżynieria ruchu Studia stacjonarne - I stopień A. Grupa przedmiotów kształcenia ogólnego
Strona 1 PLAN STUDIÓW NA KIERUNKU TRANSPORT Specjalność: Logistyka Specjalność: Transport i spedycja Specjalność: Inżynieria ruchu Studia stacjonarne - I stopień A. Grupa przedmiotów kształcenia ogólnego
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Warszawa, dnia 23 lutego 2015 r. Poz. 3
 Warszawa, dnia 23 lutego 2015 r. Poz. 3 DECYZJA Nr 13 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 23 lutego 2015 r. w sprawie wprowadzenia do stosowania Raportu Uznania Wiedzy Na podstawie art. 21 ust. 2
Warszawa, dnia 23 lutego 2015 r. Poz. 3 DECYZJA Nr 13 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 23 lutego 2015 r. w sprawie wprowadzenia do stosowania Raportu Uznania Wiedzy Na podstawie art. 21 ust. 2
Podstawy mechaniki. Maciej Pawłowski
 Podstawy mechaniki Maciej Pawłowski Gdańsk 2016 Recen zent prof. nadzw. dr hab. inż. Adam Cenian Książka wykorzystuje bogate doświadczenie badawcze i dydaktyczne autora, zdobyte podczas 40-letniej pracy
Podstawy mechaniki Maciej Pawłowski Gdańsk 2016 Recen zent prof. nadzw. dr hab. inż. Adam Cenian Książka wykorzystuje bogate doświadczenie badawcze i dydaktyczne autora, zdobyte podczas 40-letniej pracy
2. Posiada umiejętność wykonania pomiarów antropomotorycznych przedmiotu. Program przedmiotu. Treści kształcenia
 Politechnika Opolska Wydział Wychowania Fizycznego i Fizjoterapii Karta Opisu Przedmiotu Kierunek studiów Wychowanie fizyczne Profil kształcenia Ogólnoakademicki Poziom studiów Studia pierwszego stopnia
Politechnika Opolska Wydział Wychowania Fizycznego i Fizjoterapii Karta Opisu Przedmiotu Kierunek studiów Wychowanie fizyczne Profil kształcenia Ogólnoakademicki Poziom studiów Studia pierwszego stopnia
Grawitacja okiem biol chemów i Linuxów.
 Grawitacja okiem biol chemów i Linuxów. Spis treści 1. Odrobina teorii 2. Prawo powszechnego ciążenia 3. Geotropizm 4. Grawitacja na małą skalę ciężkość ciał 5. Grawitacja nie z tej Ziemi 6. Grawitacja
Grawitacja okiem biol chemów i Linuxów. Spis treści 1. Odrobina teorii 2. Prawo powszechnego ciążenia 3. Geotropizm 4. Grawitacja na małą skalę ciężkość ciał 5. Grawitacja nie z tej Ziemi 6. Grawitacja
Urządzenie do obciskania obrotowego wyrobów drążonych
 Urządzenie do obciskania obrotowego wyrobów drążonych Przedmiotem wynalazku jest urządzenie do obciskania obrotowego wyrobów drążonych, zwłaszcza osi i wałków wielostopniowych, drążonych. Pod pojęciem
Urządzenie do obciskania obrotowego wyrobów drążonych Przedmiotem wynalazku jest urządzenie do obciskania obrotowego wyrobów drążonych, zwłaszcza osi i wałków wielostopniowych, drążonych. Pod pojęciem
pierwszy termin egzamin poprawkowy
 Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 203/204 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 203/204 Język wykładowy:
PRZEKŁADNIE ŁAŃCUCHOWE
 PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
Podstawy Mechatroniki Literatura
 Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
Podstawy Mechatroniki Literatura 1. B. Heimann, W. Gerth, K. Popp.: Mechatronika komponenty, metody, przykłady. PWN 2001. 2. M. Gawrysiak: Mechatronika i projektowanie mechatroniczne. Wyd. Politechniki
KARTA PRZEDMIOTU. 1. NAZWA PRZEDMIOTU:Podstawy Konstrukcji Maszyn II. 2. KIERUNEK: Mechanika i Budowa Maszyn. 3. POZIOM STUDIÓW: Pierwszego stopnia
 KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU:Podstawy Konstrukcji Maszyn II 2. KIERUNEK: Mechanika i Budowa Maszyn 3. POZIOM STUDIÓW: Pierwszego stopnia 4. ROK/ SEMESTR STUDIÓW: rok II/ semestr 1V. LICZBA PUNKTÓW
KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU:Podstawy Konstrukcji Maszyn II 2. KIERUNEK: Mechanika i Budowa Maszyn 3. POZIOM STUDIÓW: Pierwszego stopnia 4. ROK/ SEMESTR STUDIÓW: rok II/ semestr 1V. LICZBA PUNKTÓW
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej
 Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne. laboratoryjne projektowe.
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 017/018 Język wykładowy: Polski Semestr 1 Fizyka
Sprawdzian Na rysunku przedstawiono siłę, którą kula o masie m przyciąga kulę o masie 2m.
 Imię i nazwisko Data Klasa Wersja A Sprawdzian 1. 1. Orbita każdej planety jest elipsą, a Słońce znajduje się w jednym z jej ognisk. Treść tego prawa podał a) Kopernik. b) Newton. c) Galileusz. d) Kepler..
Imię i nazwisko Data Klasa Wersja A Sprawdzian 1. 1. Orbita każdej planety jest elipsą, a Słońce znajduje się w jednym z jej ognisk. Treść tego prawa podał a) Kopernik. b) Newton. c) Galileusz. d) Kepler..
EAIiIB - Elektrotechnika - opis kierunku 1 / 5
 EAIiIB Elektrotechnika opis kierunku 1 / 5 Warunki rekrutacji na studia Wymagania wstępne i dodatkowe: Warunkiem przystąpienia do rekrutacji na studia drugiego stopnia jest posiadanie kwalifikacji pierwszego
EAIiIB Elektrotechnika opis kierunku 1 / 5 Warunki rekrutacji na studia Wymagania wstępne i dodatkowe: Warunkiem przystąpienia do rekrutacji na studia drugiego stopnia jest posiadanie kwalifikacji pierwszego
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn II
 modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn II") Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn II Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 5 52-0_ Rok: III Semestr:
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn II Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 5 52-0_ Rok: III Semestr:
Operacja technologiczna to wszystkie czynności wykonywane na jednym lub kilku przedmiotach.
 Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
Temat 23 : Proces technologiczny i planowanie pracy. (str. 30-31) 1. Pojęcia: Proces technologiczny to proces wytwarzania towarów wg przepisów. Jest to zbiór czynności zmieniających właściwości fizyczne
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok
 Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Słowo mechatronika powstało z połączenia części słów angielskich MECHAnism i electronics. Za datę powstania słowa mechatronika można przyjąć rok 1969, gdy w firmie Yasakawa Electronic z Japonii wszczęto
Uchwała nr 62/2016. Senatu AGH z dnia 25 maja 2016 r. w sprawie zasad przyjmowania na studia laureatów oraz finalistów olimpiad stopnia centralnego.
 Uchwała nr 62/2016 Opracowano na podstawie: uchwały nr 57/2017 Senatu AGH z dnia 31 maja 2017 r. i uchwały nr 39/2018 Senatu AGH z dnia 28 marca 2018 r. Senatu AGH z dnia 25 maja 2016 r. w sprawie zasad
Uchwała nr 62/2016 Opracowano na podstawie: uchwały nr 57/2017 Senatu AGH z dnia 31 maja 2017 r. i uchwały nr 39/2018 Senatu AGH z dnia 28 marca 2018 r. Senatu AGH z dnia 25 maja 2016 r. w sprawie zasad
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Dobór sprzęgieł hydrokinetycznych 179 Bibliografia 183
 Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 B23K 7/10 RZECZPOSPOLITA POLSKA. Urząd Patentowy Rzeczypospolitej Polskiej") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175070 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306629 Data zgłoszenia: 29.12.1994 (51) IntCl6: B23K 7/10 (54) Przecinarka
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
Mechanika Teoretyczna Kinematyka
 POLITECHNIKA RZESZOWSKA Wydział Budownictwa i Inżynierii Środowiska Katedra Mechaniki Konstrukcji Materiały pomocnicze do zajęć z przedmiotu: Mechanika Teoretyczna Kinematyka dr inż. Teresa Filip tfilip@prz.edu.pl
POLITECHNIKA RZESZOWSKA Wydział Budownictwa i Inżynierii Środowiska Katedra Mechaniki Konstrukcji Materiały pomocnicze do zajęć z przedmiotu: Mechanika Teoretyczna Kinematyka dr inż. Teresa Filip tfilip@prz.edu.pl
Katedra Konstrukcji Maszyn i Pojazdów Zarządzanie i inżynieria produkcji. Obszary kształcenia. Nauki techniczne
 Nazwa przedmiotu Kod przedmiotu Jednostka Kierunek Obszary kształcenia TECHNIKA A CYWILIZACJA M:03863W0 Katedra Konstrukcji Maszyn i Pojazdów Zarządzanie i inżynieria produkcji Nauki techniczne Profil
Nazwa przedmiotu Kod przedmiotu Jednostka Kierunek Obszary kształcenia TECHNIKA A CYWILIZACJA M:03863W0 Katedra Konstrukcji Maszyn i Pojazdów Zarządzanie i inżynieria produkcji Nauki techniczne Profil
Oferta edukacyjna Uniwersytetu Rzeszowskiego. www.mechatronika.univ.rzeszow.pl
 Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
Mechatronika i szybkie prototypowanie układów sterowania
 Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
WYDZIAŁ TRANSPORTU I INFORMATYKI MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY
 WYDZIAŁ TRANSPORTU I INFORMATYKI Nazwa kierunku Poziom Profil Symbole efektów na kierunku K_W01 K _W 02 K _W03 K _W04 K _W05 K _W06 MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY Efekty - opis słowny Po
WYDZIAŁ TRANSPORTU I INFORMATYKI Nazwa kierunku Poziom Profil Symbole efektów na kierunku K_W01 K _W 02 K _W03 K _W04 K _W05 K _W06 MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY Efekty - opis słowny Po
Karta (sylabus) modułu/przedmiotu Inżynieria Materiałowa Studia I stopnia. Podstawy elektrotechniki i elektroniki Rodzaj przedmiotu: Język polski
 modułu/przedmiotu Inżynieria Materiałowa Studia I stopnia. Podstawy elektrotechniki i elektroniki Rodzaj przedmiotu: Język polski") Karta (sylabus) modułu/przedmiotu Inżynieria Materiałowa Studia I stopnia Przedmiot: Podstawy elektrotechniki i elektroniki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: IM S 0 4-0_0 Rok: II Semestr:
Karta (sylabus) modułu/przedmiotu Inżynieria Materiałowa Studia I stopnia Przedmiot: Podstawy elektrotechniki i elektroniki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: IM S 0 4-0_0 Rok: II Semestr:
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia
 modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia") Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
EAIiIB - Automatyka i Robotyka - opis kierunku 1 / 5
 EAIiIB Automatyka i Robotyka opis kierunku 1 / 5 Warunki rekrutacji na studia Wymagania wstępne i dodatkowe: Warunkiem przystąpienia do rekrutacji na studia drugiego stopnia jest posiadanie kwalifikacji
EAIiIB Automatyka i Robotyka opis kierunku 1 / 5 Warunki rekrutacji na studia Wymagania wstępne i dodatkowe: Warunkiem przystąpienia do rekrutacji na studia drugiego stopnia jest posiadanie kwalifikacji
INSTRUKCJA DO ĆWICZENIA NR 2. Analiza kinematyczna napędu z przekładniami
 INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
INSTRUKCJA DO ĆWICZENIA NR 2 Analiza kinematyczna napędu z przekładniami 1. Wprowadzenie Układ roboczy maszyny, cechuje się swoistą charakterystyką ruchowoenergetyczną, często odmienną od charakterystyki
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
PL B1. PRZEDSIĘBIORSTWO CONCEPT STAL B&S LEJMAN SPÓŁKA JAWNA, Chełm, PL BUP 26/15. STANISŁAW LEJMAN, Chełm, PL
 PL 223981 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223981 (13) B1 (21) Numer zgłoszenia: 408597 (51) Int.Cl. F16H 7/02 (2006.01) F16H 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223981 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223981 (13) B1 (21) Numer zgłoszenia: 408597 (51) Int.Cl. F16H 7/02 (2006.01) F16H 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PLAN STUDIÓW Wydział Chemiczny, Wydział Mechaniczny, Wydział Fizyki Technicznej i Matematyki Stosowanej Inżynieria materiałowa. efekty kształcenia
 WYDZIAŁ: KIERUNEK: poziom kształcenia: profil: forma studiów: Lp. O/F Semestr 1 kod modułu/ przedmiotu* 1 O PG_00039772 Matematyka I 2 O PG_00039777 Materiały a postęp cywilizacji 3 O PG_00039773 Matematyka
WYDZIAŁ: KIERUNEK: poziom kształcenia: profil: forma studiów: Lp. O/F Semestr 1 kod modułu/ przedmiotu* 1 O PG_00039772 Matematyka I 2 O PG_00039777 Materiały a postęp cywilizacji 3 O PG_00039773 Matematyka
Kierunek: Mechanika i Budowa Maszyn Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechanika i Budowa Maszyn Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 013/014 Język wykładowy: Polski Semestr 1 RBM-1-101-s
Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechanika i Budowa Maszyn Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 013/014 Język wykładowy: Polski Semestr 1 RBM-1-101-s
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Podstawy Procesów i Konstrukcji Inżynierskich. Dynamika
 Podstawy Procesów i Konstrukcji Inżynierskich Dynamika Prowadzący: Kierunek Wyróżniony przez PKA Mechanika klasyczna Mechanika klasyczna to dział mechaniki w fizyce opisujący : - ruch ciał - kinematyka,
Podstawy Procesów i Konstrukcji Inżynierskich Dynamika Prowadzący: Kierunek Wyróżniony przez PKA Mechanika klasyczna Mechanika klasyczna to dział mechaniki w fizyce opisujący : - ruch ciał - kinematyka,
Robotyzacja procesów wytwórczych - Plan studiów. Semestr 1. Liczba godzin. Suma godzin. Katedra / Instytut. Forma zaliczenia. Nr Modułu.
 Robotyzacja procesów wytwórczych - Plan studiów Semestr 1 Liczba 1 1 BHP og. ucz. 15 15 1 zal. KTiPTP RPW-MK01 2 2 Przysposobienie biblioteczne og. ucz. 2 2 0 zal. BPL RPW-MK02 3 3 Ochrona własności intelektualnej
Robotyzacja procesów wytwórczych - Plan studiów Semestr 1 Liczba 1 1 BHP og. ucz. 15 15 1 zal. KTiPTP RPW-MK01 2 2 Przysposobienie biblioteczne og. ucz. 2 2 0 zal. BPL RPW-MK02 3 3 Ochrona własności intelektualnej
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
PLAN STUDIÓW STACJONARNYCH STOPNIA I kierunek TRANSPORT - przedmioty wspólne (krk)
") - przedmioty wspólne (krk) MK 1 Automatyka 1,2 60 30 30 2 2 2 1 2 Badania operacyjne 3 45 30 15 2 1 4 3 Ekonomia 4 30 30 2 3 4 Ekonomika transportu 5 45 30 15 2 1 3 5 Elektronika 6,7 60 30 30 2 3 2 3 6
- przedmioty wspólne (krk) MK 1 Automatyka 1,2 60 30 30 2 2 2 1 2 Badania operacyjne 3 45 30 15 2 1 4 3 Ekonomia 4 30 30 2 3 4 Ekonomika transportu 5 45 30 15 2 1 3 5 Elektronika 6,7 60 30 30 2 3 2 3 6
Uchwała nr 44/2018 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia 24 maja 2018 r.
 Uchwała nr 44/2018 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia 24 maja 2018 r. w sprawie zmiany uchwały nr 28/2016 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia
Uchwała nr 44/2018 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia 24 maja 2018 r. w sprawie zmiany uchwały nr 28/2016 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia
Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 2017/2018 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Poziom studiów: Studia I stopnia Forma i tryb studiów: Niestacjonarne Rocznik: 2017/2018 Język wykładowy:
 Wydawnictwo
Wydawnictwo Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Obrabiarki Specjalizowane II Specialized Machine Tools. MiBM II stopień (I stopień / II stopień) akademicki (ogólno akademicki / praktyczny)
 akademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Obrabiarki Specjalizowane II Specialized Machine Tools A. USYTUOWANIE
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Obrabiarki Specjalizowane II Specialized Machine Tools A. USYTUOWANIE
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Stanowisko napędów mechanicznych
 Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Stanowisko napędów mechanicznych Światowe zapotrzebowanie na wykwalifikowanych mechaników w przemyśle stale wzrasta. Polegamy na ich pracy przy montażu, konserwacji, naprawach i wymianach wyposażenia mechanicznego.
Uchwała nr 44/2018 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia 24 maja 2018 r.
 Uchwała nr 44/2018 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia 24 maja 2018 r. w sprawie zmiany uchwały nr 28/2016 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia
Uchwała nr 44/2018 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia 24 maja 2018 r. w sprawie zmiany uchwały nr 28/2016 Senatu Politechniki Rzeszowskiej im. Ignacego Łukasiewicza z dnia
WYDZIAŁ TRANSPORTU I INFORMATYKI MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY
 WYDZIAŁ TRANSPORTU I INFORMATYKI Nazwa kierunku Poziom kształcenia Profil kształcenia Symbole efektów kształcenia na kierunku K_W01 K _W 02 K _W03 MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY Efekty
WYDZIAŁ TRANSPORTU I INFORMATYKI Nazwa kierunku Poziom kształcenia Profil kształcenia Symbole efektów kształcenia na kierunku K_W01 K _W 02 K _W03 MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY Efekty
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
Uchwała nr 56/2017. Senatu AGH z dnia 31 maja 2017 r.
 Uchwała nr 56/2017 Senatu AGH z dnia 31 maja 2017 r. w sprawie ustalenia planowanej liczby miejsc na pierwszym roku w roku akademickim 2017/2018 na kierunkach, na które będzie prowadzona rekrutacja Na
Uchwała nr 56/2017 Senatu AGH z dnia 31 maja 2017 r. w sprawie ustalenia planowanej liczby miejsc na pierwszym roku w roku akademickim 2017/2018 na kierunkach, na które będzie prowadzona rekrutacja Na
Zasady dynamiki przypomnienie wiadomości z klasy I
 Zasady dynamiki przypomnienie wiadomości z klasy I I zasada dynamiki Newtona Jeżeli na ciało nie działa żadna siła lub działające siły się równoważą, to ciało pozostaje w spoczynku lub porusza się ruchem
Zasady dynamiki przypomnienie wiadomości z klasy I I zasada dynamiki Newtona Jeżeli na ciało nie działa żadna siła lub działające siły się równoważą, to ciało pozostaje w spoczynku lub porusza się ruchem
Załącznik 5 Plan studiów na kierunku MECHATRONIKA (studia niestacjonarne I stopnia)
") Załącznik 5 Plan studiów na kierunku MECHATRONIKA (studia niestacjonarne I stopnia) Semestr Nazwa kształcenia/ MK_0 Fizyka 8 8 36 5 Z WEiI IEiTI MT N 0 0-0_0 2 MK_02 Funkcje elementarne 8 8 3 Z WEiI KM
Załącznik 5 Plan studiów na kierunku MECHATRONIKA (studia niestacjonarne I stopnia) Semestr Nazwa kształcenia/ MK_0 Fizyka 8 8 36 5 Z WEiI IEiTI MT N 0 0-0_0 2 MK_02 Funkcje elementarne 8 8 3 Z WEiI KM
Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 21/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
ogólna charakterystyka
 PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechanika i budowa maszyn studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Rozwój szkolnictwa zawodowego w Gdyni - budowa, przebudowa i rozbudowa infrastruktury szkół zawodowych oraz wyposażenie
 Rozwój szkolnictwa zawodowego w Gdyni - budowa, przebudowa i rozbudowa infrastruktury szkół zawodowych oraz wyposażenie Opis przedmiotu zamówienia nr 7 Specjalistyczne wyposażenie warsztatu/pracowni -
Rozwój szkolnictwa zawodowego w Gdyni - budowa, przebudowa i rozbudowa infrastruktury szkół zawodowych oraz wyposażenie Opis przedmiotu zamówienia nr 7 Specjalistyczne wyposażenie warsztatu/pracowni -
Zespół Szkół Zawodowych CZEGO UCZYMY?
 Zespół Szkół Zawodowych CZEGO UCZYMY? Technik ekonomista praca w biurze zarządzanie firmą, marketing, rachunkowość i administracja Technik ekonomista praca w biurze zarządzanie firmą, marketing, rachunkowość
Zespół Szkół Zawodowych CZEGO UCZYMY? Technik ekonomista praca w biurze zarządzanie firmą, marketing, rachunkowość i administracja Technik ekonomista praca w biurze zarządzanie firmą, marketing, rachunkowość
Załącznik 5 Plan studiów na kierunku MECHATRONIKA (studia stacjonarne I stopnia)
") Załącznik 5 Plan studiów na kierunku MECHATRONIKA (studia stacjonarne I stopnia) Semestr Nazwa kształcenia/ MK_0 Fizyka 30 30 60 5 Z WEiI IEiTI MT S 0 0-0_0 2 MK_02 Funkcje elementarne 30 30 3 Z WEiI KM
Załącznik 5 Plan studiów na kierunku MECHATRONIKA (studia stacjonarne I stopnia) Semestr Nazwa kształcenia/ MK_0 Fizyka 30 30 60 5 Z WEiI IEiTI MT S 0 0-0_0 2 MK_02 Funkcje elementarne 30 30 3 Z WEiI KM
AKADEMIA HUMANISTYCZNO - EKONOMICZNA W ŁODZI NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN
 AKADEMIA HUMANISTYCZNO - EKONOMICZNA W ŁODZI NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN 3,5-letnie inżynierskie studia stacjonarne i niestacjonarne I stopnia o specjalnościach: Konstrukcja maszyn Technologia
AKADEMIA HUMANISTYCZNO - EKONOMICZNA W ŁODZI NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN 3,5-letnie inżynierskie studia stacjonarne i niestacjonarne I stopnia o specjalnościach: Konstrukcja maszyn Technologia
Wymiar godzin Pkt Kod Nazwa przedmiotu Egz.
 PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
Czym jest aerodynamika?
 AERODYNAMIKA Czym jest aerodynamika? Aerodynamika - dział fizyki, mechaniki płynów, zajmujący się badaniem zjawisk związanych z ruchem gazów, a także ruchu ciał stałych w ośrodku gazowym i sił działających
AERODYNAMIKA Czym jest aerodynamika? Aerodynamika - dział fizyki, mechaniki płynów, zajmujący się badaniem zjawisk związanych z ruchem gazów, a także ruchu ciał stałych w ośrodku gazowym i sił działających
K O M U N I K A T. ogłaszam poniżej. listę 10% najlepszych absolwentów Uniwersytetu Technologiczno-Przyrodniczego roku akademickiego 2017/2018
 Bydgoszcz, 2018-12-18 RDS.4323.1.2018 K O M U N I K A T Na podstawie Zarządzenia nr Z.15.2017.2018 Rektora Uniwersytetu Technologiczno-Przyrodniczego z dnia 23 października 2017 r. w sprawie wzorów zaświadczeń
Bydgoszcz, 2018-12-18 RDS.4323.1.2018 K O M U N I K A T Na podstawie Zarządzenia nr Z.15.2017.2018 Rektora Uniwersytetu Technologiczno-Przyrodniczego z dnia 23 października 2017 r. w sprawie wzorów zaświadczeń
Sekcja Mechatroniki Komitetu Budowy Maszyn PAN. Zakopane 2018
 Sekcja Mechatroniki Komitetu Budowy Maszyn PAN Zakopane 2018 Rozporządzenie Ministra Nauki i Szkolnictwa Wyższego z dnia 08.08.2011 r. (Dz. U. Nr 179 2011, poz. 1065) Obszar nauk technicznych Dziedzina
Sekcja Mechatroniki Komitetu Budowy Maszyn PAN Zakopane 2018 Rozporządzenie Ministra Nauki i Szkolnictwa Wyższego z dnia 08.08.2011 r. (Dz. U. Nr 179 2011, poz. 1065) Obszar nauk technicznych Dziedzina
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H