Budowa i oprogramowanie komputerowych systemów sterowania. Wykład 9. Systemy operacyjne
|
|
|
- Janusz Kurek
- 6 lat temu
- Przeglądów:
Transkrypt
1 Budowa i oprogramowanie komputerowych systemów sterowania Wykład 9 Systemy operacyjne
2 Pamięć wirtualna Pamięć wirtualna jest techniką programową a także sprzętową gospodarowania pamięcią operacyjną RAM pozwalającą na przydzielanie pamięci dla wielu procesów, zwalnianie jej i powtórne przydzielanie. Mechanizm umożliwia przydzielenie procesom więcej pamięci niż rzeczywista ilość pamięci fizycznej zainstalowanej w komputerze poprzez przeniesienie danych z ostatnio nie używanej pamięci do pamięci masowej (np. twardego dysku). W sytuacji gdy procesor odwołuje się do danych z pamięci przeniesionej na dysk przesuwa się te dane do pamięci w wolne miejsce, a gdy brak wolnej pamięci zwalnia się ją przez wyżej opisane przerzucenie jej na dysk.
3 Pamięć wirtualna Najczęściej spotykane są dwa sposoby przechowywania danych zrzuconych z pamięci fizycznej na dysk. Pierwszy, stosowany w systemach rodziny Windows polega na zapisie pamięci w pliku (znajdującym się na ustalonej partycji komputera). Drugi, stosowany w systemach z rodziny UNIX to utworzenie osobnej partycji wymiany (partycji swap) przeznaczonej wyłącznie na pamięć wirtualną. Zapewnia to szybszy dostęp do danych niż pierwsze rozwiązanie (głównie ze względu na ominięcie obsługi systemu plików).
4 System operacyjny System operacyjny jest głównym programem integrującym sprzętowe i programowe zasoby komputera, który działa jako pośrednik między użytkownikiem komputera a sprzętem komputerowym. Zadaniem systemu operacyjnego jest tworzenie środowiska, w którym użytkownik może przygotowywać i wykonywać inne programy. Podstawowym celem systemu operacyjnego jest: zarządzanie zasobami sprzętowymi komputera zapewnienie wygodnej eksploatacji systemy komputerowego wydajna eksploatacja sprzętu komputerowego
5 Wady ogólnych systemów operacyjnych W systemach operacyjnych ogólnego przeznaczenia dąży się do optymalizacji średniej wydajności, kosztem mniejszej efektywności w przypadku pojedynczego zadania. Udogodnienia takie jak stronicowanie na żądanie i wszelkie pamięci podręczne powodują nieprzewidywalne odchylenia czasu wykonania. Szeregowanie zadań nie uwzględnia wymagań odnośnie czasu wykonania określonego zadania.
6 System czasu rzeczywistego System czasu rzeczywistego (ang. real-time) jest systemem, który jest stosowany tam gdzie występują surowe wymagania na czas wykonywania operacji lub przepływu danych. Podział systemów czasu rzeczywistego: łagodny system czasu rzeczywistego (ang. soft real-time system) rygorystyczny system czasu rzeczywistego (ang. hard realtime system)
7 Proces Proces jest to wykonywany program, który ma przydzieloną pamięć, licznik rozkazów, zestaw rejestrów, zasoby wejść-wyjść. W systemie może istnieć kilka procesów związanych z wykonywaniem tego samego programu. Stany procesu: nowy aktywny oczekiwanie gotowy zakończony
8 Proces Planowanie procesów uruchomione w systemie procesy trafiają do kolejki zadań (ang. job queue), gotowe do działania procesy trzymane są na liście zwanej listą procesów gotowych (ang. ready queue), w danej chwili może być aktywny tylko jeden proces. Przełączanie kontekstu (ang. context switch) czynności związane z przełączaniem procesora pomiędzy wykonywaniem kolejnych procesów, jest to czas wykorzystywany przez system operacyjny na zapamiętanie stanu starego procesu i odtworzenie stanu nowego procesu, w zależności od systemu wynosi od 1 do 100us.
9 Wątek Wątek (ang. thread) podstawowa jednostka wykorzystania procesora posiadająca licznik rozkazów, zbiór rejestrów i obszar stosu. Wątek współużytkuje z innymi równorzędnymi wątkami sekcję kodu, sekcję danych oraz zasoby systemu operacyjnego, co określane jest zadaniem (ang. task).
10 Zadania Wywłaszczanie możliwość zatrzymania aktualnego zadania, zmiany kontekstu procesora i uruchomienie innego zadania. Priorytet zadania liczba określająca względną pilność zadania Praca wielozadaniowa możliwość obsługi przez system operacyjny więcej niż jednego zadania umieszczonego w pamięci
11 Szeregowanie zadań Szeregowanie zadań planowanie przydziału procesora dla procesów czekających w kolejce procesów gotowych Algorytmy szeregowania zadań: FCFS pierwszy zgłoszony pierwszy obsłużony SJF najpierw najkrótsze zadanie planowanie priorytetowe planowanie rotacyjne (ang. round-robin) - zaprojektowane specjalnie dla systemów z podziałem czasu, każdemu zadaniu w kolejce przydzielany jest kwant czasu, zwykle ms, po upływie tego czasu proces jest wywłaszczany
12 Semafory Semafor jest zmienna całkowita, której wartość może być ustawiana przez jeden proces, a sprawdzana i kasowana przez drugi. Ustawienie zmiennej jest traktowane przez proces sprawdzający jako sygnał spełnienia warunku umożliwiającego dalsze wykonanie tego procesu. Brak spełnienia warunku w chwili sprawdzenia oznacza niemożliwość kontynuacji procesu i konieczność zawieszenia jego wykonania. Późniejsze ustawienie wartości zmiennej powoduje automatyczne wznowienie zawieszonego procesu.
13 Semafory Dokładna definicja semafora wprowadzona w standardzie POSIX precyzuje, że warunkiem umożliwiającym kontynuacje procesu sprawdzającego jest dodatnia wartość semafora, natomiast wartość mniejsza lub równa zeru powoduje zawieszenie tego procesu. Dla uniknięcia potencjalnych błędów, wynikających z jednoczesnego działania na tej samej zmiennej, operacje sprawdzające i ustawiające wartość semafora muszą być realizowane przez niepodzielne funkcje systemowe.
14 Depozyty Depozyty można uważać za rozszerzenie tradycyjnego mechanizmu semaforów służących do przekazywania impulsów synchronizujących między współpracującymi procesami. Rozszerzenie operacji polega na stowarzyszeniu impulsów z pewna stała i niezmienna wiadomością, przekazywana do odbiorcy niezależnie od normalnej akcji synchronizującej.
15 Potoki i kolejki Funkcjonalnie, obydwa mechanizmy realizują niemal identyczne bufory komunikacyjne, umożliwiające magazynowanie i jednokierunkowe przekazywanie danych miedzy procesami. W obydwu wypadkach dane są zapisywane do bufora i odczytywane w tej samej kolejności, w postaci strumienia przekazywanych bajtów. Operacja zapisania danych nie wstrzymuje nadawcy, natomiast operacja odczytu z pustego bufora może spowodować zawieszenie odbiorcy do czasu pojawienia się danych.
16 Potoki i kolejki Mimo funkcjonalnego podobieństwa, obydwa mechanizmy różnią się istotnie na poziomie implementacji. Kolejki są realizowane jako specjalne pliki dyskowe z buforowanymi operacjami zapisu i odczytu. Pliki te istnieją permanentnie na dysku, a ich nazwy sa zapisane w katalogu. Wszystkie operacje na kolejkach wykonuje systemowy menedżer plików. Implementacja potoków może być dwojaka, zależnie od tego, czy będą one organizowane przez menedżer plików, czy specjalny menedżer potoków. W pierwszym wypadku, potoki są realizowane jako tymczasowe pliki dyskowe bez nazwy, z buforowanymi operacjami zapisu i odczytu. W drugim, dane są przekazywane wyłącznie poprzez bufory w pamięci, bez zapisywania ich na dysku.
17 Sygnały Sygnały wykorzystywane są najczęściej do informowania o błędach i pewnych sytuacjach wyjątkowych, jak np. wznowienie zawieszonego procesu lub pilne zdarzenie na łączu TCP/IP. Niektóre z sygnałów powodują awaryjne zakończenie procesu. Obsługa sygnału jest zazwyczaj asynchroniczna - w momencie jego nadejścia wywoływana jest odpowiednia procedura obsługi, o ile taka istnieje dla danego typu sygnału

18 Pamięć współdzielona Procesy mają rozdzielone segmenty danych, modyfikacje na danych w jednym procesie nie mogą wpłynąć w żaden sposób na dane drugiego procesu. Aby oba procesy miały dostęp do tych samych danych należy stworzyć oddzielny segment danych i nadać dostęp do niego obu procesom.
19 Odmierzanie czasu Jedną z najważniejszych i najczęściej spotykanych funkcji systemu czasu rzeczywistego jest generowanie zdarzeń, które mają w określonym czasie uruchomić odpowiednie zadania systemowe. Do tego celu wykorzystywane są specjalne obiekty zwane timerami. W celu użycia timera należy go stworzyć, nastawić a następnie uruchomić. Podczas tworzenia timera musimy określić rodzaj zdarzeń generowanych przez timer. Ustawienie timera polega na przekazaniu mu informacji o planowanym czasie wykonania, sposobie określenia tego czasu i i trybie pracy timera. Czas można określić w sposób relatywny (przesunięcie czasowe od chwili bieżącej) bądź absolutny (czas UTC lub lokalny). Timery mogą pracować w dwóch trybach: wyzwolenie jednorazowe, wyzwolenie cykliczne.
20 Struktury systemów operacyjnych Prosty system operacyjny Program użytkownika Rezydentne programy systemowe Sprzęt
21 Struktury systemów operacyjnych Jednozadaniowy system operacyjny Program użytkownika Rezydentne programy systemowe Moduły obsługi urządzeń z poziomu systemu Moduły obsługi urządzeń w pamięci ROM BIOS Sprzęt
22 Struktury systemów operacyjnych Wielozadaniowy system operacyjny Powłoka (shell) Programy systemowe Program użytkownika Program użytkownika Interfejs programów użytkowych (API) Jądro (kernel) Programy obsługi sprzętu Sprzęt
23 Struktury systemów operacyjnych System operacyjny z rozszerzeniami czasu rzeczywistego Powłoka (shell) Programy systemowe Program użytkownika Program użytkownika Interfejs programów użytkowych (API) Jądro (kernel) Programy obsługi sprzętu Programy użytkownika pracujace w czasie rzeczywistym Jądro czasu rzeczywistego Sprzęt
24 System operacyjny DOS Jeden z pierwszych systemów operacyjnych dla platformy PC. Jest to prosty system operacyjny umożliwiający w zasadzie obsługę tylko jednego programu użytkownika. Zapewnia dostęp do zasobów sprzętowych poprzez odpowiednie sterowniki lub w sposób bezpośredni z wykorzystaniem instrukcji wejścia-wyjścia. System ten nie jest dobrą platformą dla nowoczesnych złożonych systemów sterowania, pracujących w czasie rzeczywistym.
25 System operacyjny DOS Jednak prostota obsługi, niska cena i duża popularnośc, przyczyniły się, że jest on jeszcze dość często stosowany w niewielkich systemach, gdzie nie jest wymagana wielozadaniowość. W systemie tym istnieje możliwość implementacji procedur pracujących w czasie rzeczywistym poprzez wykorzystanie przerwania zegarowego. Wadą systemu jest brak zaimplementowanych procedur obsługi sieci. Można to jednak zrealizować poprzez wykorzystanie zewnętrznych bibliotek.
26 System operacyjny DOS Zalety systemu DOS: prostota szybkość implementacji niewielkie rozmiary jądra dostępnośc narzędzi do programowania łatwy dostęp do zasobów sprzętowych duża ilość oprogramowania
27 System operacyjny DOS Wady systemu DOS: brak wielozadaniowości brak wbudowanej obsługi sieci brak wygodnych mechanizmów umożliwiających implementację systemu czasu rzeczywistego brak możliwości zagwarantowania krótkiego czasu reakcji na zdarzenie łatwość naruszenia spójności systemu - brak odporności systemu na błędy
28 RT Kernel Istnieje możliwość obejścia rzęści z tych ograniczeń poprzez zastosowanie nakładki na system operacyjny implementującej część z brakujących mechanizmów, np. RT Kernel. Jest to niewielka biblioteka procedur (ok. 16KB kodu i 6kB danych) zapewniająca mechanizmy do efektywnego tworzenia programów pracujących w czasie rzeczywistym.
29 RT Kernel Cechy biblioteki to: liczba zadań limitowana rozmiarem pamięci czas zmiany kontekstu około 2 mikrosekund synchronizacja zadań zegarem czasu rzeczywistego o częstotliwości do 10kHz wywłaszczanie zadań na podstawie ich priorytetów synchronizacja zadań z wykorzystaniem semaforów wymiana informacji między zadaniami z wykorzystaniem skrzynek pocztowych i komunikatów Popularność tych dodatkowych bibliotek jest jednak nieduża.
30 Jądro systemu - rodzaje Mikrojądro (ang. microkernel) to rodzaj jądra systemu operacyjnego, które zawiera tylko najbardziej niezbędne elementy, takie jak funkcje zarządzania wątkami, komunikacją międzyprocesową, oraz obsługą przerwań i wyjątków. Wszelkie inne zadania, takie jak np. obsługa systemów plików, sieci, sprzętu realizowane są w przestrzeni użytkownika przez osobne serwery. Dobrymi przykładami systemów operacyjnych opartych na mikrojądrze są Amoeba, QNX, BeOS, Haiku czy Hurd, mikrojądrami są także (używane w Hurdzie) Mach i L4. Firma Microsoft pracuje nad własnym rozwiązaniem tego typu w projekcie Singularity.
31 Jądro systemu - rodzaje Jądro monolityczne - to rodzaj jądra systemu operacyjnego, w którym większa część funkcji jądra zaimplementowana jest w pojedynczym obrazie pamięci, który ładowany jest na stałe do pamięci komputera przez bootloader. Zdarza się jednak, że do jądra monolitycznego (zwanego wtedy modularnym) dopisywana jest możliwość ładowania modułów, które jednak nie realizują najbardziej podstawowych funkcji jądra. Jądro monolityczne cechuje się wyższą wydajnością niż mikrojądro, zwłaszcza w systemach jednoprocesorowych oraz przy obciążaniu systemu tylko jednym procesem.
32 Jądro systemu - rodzaje Awaria (np. błąd programisty) w dowolnym miejscu jądra monolitycznego może spowodować awarię całego systemu, przez co testowanie tych jąder (szczególnie sterowników urządzeń) jest czasochłonne i skomplikowane, a ewentualne luki mogą często być wykorzystane przez crackerów do łamania zabezpieczeń. Tworzenie systemów czasu rzeczywistego przy pomocy jądra monolitycznego, jest zwykle trudniejsze niż w mikrojądrach, z powodu konieczności zagwarantowania ograniczeń czasowych przez wszystkie komponenty (zwykle przy wykorzystaniu wywłaszczania mało ważnych komponentów, oraz unikanie blokad w postaci semaforów). Przykładami systemów operacyjnych z jądrem monolitycznym są np. FreeBSD, Linux.
33 Jądro systemu - rodzaje Jądro hybrydowe jest jądrem opartym o zmodyfikowane architektury jądra monolitycznego oraz mikrojądra używanych w systemach operacyjnych. W przeciwieństwie do mikrojądra, wszystkie (lub prawie wszystkie) usługi wykonywane są w przestrzeni jądra. Podobnie jak w jądrze monolitycznym, nie ma strat w wydajności wywołanych przepływem komunikatów mikrojądra i przełączaniem kontekstu między przestrzenią użytkownika a jądra. Jednakże, podobnie jak w jądrach monolitycznych, nie ma korzyści wynikających z umieszczenia usług w przestrzeni użytkownika. Z tego typu jądra korzystają m.in. systemy operacyjne z rodziny Windows.
34 System operacyjny Windows 95, 98, ME Systemy rodziny Windows są rozszerzeniem systemu DOS zapewniającym interfejs graficzny oraz możliwość pracy wielozadaniowej. Zastosowany mechanizm zawłaszczający powoduje, że system ten nie nadaje się do stosowania w systemach czasu rzeczywistego. Związane jest to z tym, że aktualnie wykonywane zadanie może rezerwować zasoby systemu dowolnie długo. W efekcie nie jest możliwe zagwarantowanie krótkiego czasu reakcji na zdarzenie czasu rzeczywistego. Dodatkowo niepoprawna praca jednej aplikacji może doprowadzić do załamania stabilności systemu. Istnieją rozszerzenia systemu umożliwiające pracę w czasie rzeczywistym, jednak nie są one zbyt popularne.
35 System operacyjny Windows NT, 2000, XP Systemy operacyjne z rodziny Windows NT, 2000, XP posiadają nową w pełni 32-bitową architekturę oraz interfejs użytkownika zgodny z systemami Windows 95/98. Mechanizmy pracy wielozadaniowej zastały w nich znacznie zmienione, przez co systemy te można wykorzystać do pracy w czasie rzeczywistym. System posiada architekturę opartą o jądro hybrydowe. Obecnie są to najpopularniejsze systemy stosowane w komputerowych systemach sterowania.

36 System operacyjny Windows NT, 2000, XP
37 System operacyjny Windows NT, 2000, XP Szeregowanie wątków w Windowsie jest zaimplementowane wewnątrz jądra systemu. Nie ma żadnego pojedynczego modułu czy algorytmu odpowiadającego za szeregowanie. Aczkolwiek kod rozprzestrzeniony jest w jądrze w zdarzeniach związanych z szeregowaniem. Ogólnie wszystkie te metody nazywane są kernel dispatcher.
38 System operacyjny Windows NT, 2000, XP Następujące zdarzenia mogą wywołać dispatching : Wątek jest gotowy do uruchomienia, np. został utworzony, zakończył status czekania. Wątek oddaje procesor, np. zakończył się, skończył mu się kwant czasu, wszedł w stan czekania. Zmienił się priorytet wątku. Wątek nie może wykonywać się już na danym procesorze, ponieważ zmienił mu się atrybut processor affinity. W każdym z tych przypadków, system musi zadecydować jaki wątek powinien być uruchomiony jako następny. Gdy już zostanie on wybrany, następuje zmiana kontekstu.
39 System operacyjny Windows NT, 2000, XP Do szeregowania wątków używa się 32 priorytetów, w zakresie od 0 do 31. Dzielą się one następująco: Szesnaście poziomów czasu rzeczywistego ( ) Piętnaście dynamicznych poziomów ( 1 15 ) Jeden poziom systemowy ( 0 ) Priorytety wątków są tworzone z dwóch różnych perspektyw, Windows API i jądra systemu. Najpierw API przyznaje klasę priorytetu procesom, podczas ich tworzenia (Czas rzeczywisty, Wysoki, Powyżej normalnego, Normalny, Poniżej normalnego, Niski), Następnie wewnątrz tych klasy istnieją podklasy dla utworzonych przez te procesy wątków ( Krytyczny, Wysoki, Powyżej normalnego, Normalny, Poniżej normalnego, Niski).
40 System operacyjny Windows NT, 2000, XP
41 System operacyjny Windows NT, 2000, XP Proces posiada tylko jedną wartość priorytetu, ale jego wątki już nie. Każdy wątek posiada bazowy priorytet (dziedziczony z procesu) i aktualny priorytet. To właśnie według aktualnego priorytetu następuje szeregowanie. Z różnych powodów Windows może zmienić priorytet wątków w dynamicznym zakresie ( 1 15) przez pewien okres czasu. Natomiast nigdy nie zmieni priorytetów wątków w zakresie czasu rzeczywistego. Posiadają one zawsze ten sam priorytet bazowy, jak i aktualny. Priorytety w dynamicznym zakresie mogą być zmieniane przez użytkownika ( o ile posiada prawa do zmiany priorytetów ).
42 System operacyjny Windows NT, 2000, XP Stany wątków: Ready( Gotowy ) Wątek jest gotowy do uruchomienia Standby( Oczekiwanie) Wątek został wybrany do uruchomienia, jeśli zajdą wszystkie potrzebne warunki, nastąpi zmiana dla kontekstu dla tego wątku. Z tego stanu wątek może zostać wywłaszczony. Running( Uruchomiony) Wątek właśnie jest uruchomiony. Initialized ( Tworzenie) Jest to stan podczas, którego wątek jest tworzony. Terminate( Zakończony) W tym stanie wątek, znajduje się, gdy zakończy działanie. Waiting ( Czekanie ) wątek jest w stanie czekania, np. na jakiś semafor. Transition wątek jest w tym stanie, gdy jest gotowy do uruchomienia, lecz jądro systemu nie posiada wolnej pamięci. Gdy znajdzie się pamięć, wątek przechodzi do stanu Gotowy.
43 System operacyjny Windows NT, 2000, XP Gdy, wątek jest gotowy do uruchomienia, dostaje procesor na okres kwantu czasu. Kwant czasu może być różnej długości, ze względu na kilka czynników: Konfiguracja systemu (długie czy krótkie) Status procesu( Pierwszoplanowy czy w tle) Jednakże, proces może nie ukończyć swojego kwantu czasu, gdyż system Windows uwzględnia wywłaszczanie podczas szeregowania wątków. Ponadto, wątek może zostać wywłaszczony zanim zacznie wykorzystywać swój kwant czasu.
44 System operacyjny Windows NT, 2000, XP Kwant czasu może być różnej długości. W Windowsie XP jest on domyślnie równy dwóm tyknięciom zegara. W Windows Server 2003 wynosi on 12 tyknięć zegara. Związane to jest z tym aby na systemie serwerowym zminimalizować liczbę zmian kontekstu, dzięki dłuższemu kwantowi czasu, aplikacja serwerowa ma większą szansę na zrealizowanie zapytania klienta. Długość tyknięcia zegara zależy od platformy sprzętowej, dla przykładu dla większości jednoprocesorowych maszyn architektury x86 wynosi on około 10 ms, natomiast dla wieloprocesorowych maszyn architektury x86 około 15 ms.
45 System operacyjny Windows NT, 2000, XP Scenariusze szeregowania: Wątek oddaje procesor, np. zawisł na semaforze, operacji wejścia/wyjścia - na jego miejsce wchodzi pierwszy wątek z kolejki o największym priorytecie. Wątek zostaje wywłaszczony wraca wtedy na początek kolejki o swoim priorytecie. Wątek oddaje procesor, np. skończył mu się kwant czasu, zakończył działanie - wątek wraca na koniec kolejki o swoim priorytecie.
46 System operacyjny Windows NT, 2000, XP Główne cechy to: wywłaszczalność z podziałem czasu zwiększona odporność na błędy sprzętowe i programowe Wady systemu: zbyt długi i niestabilny czas obsługi przerwań mała liczba poziomów priorytetów brak odporność na błędy procedur czasu rzeczywistego instalowanych na poziomie jądra systemu Powyższe wady spowodowały, że powstały różne rozszerzenia zwiększające wydajność systemu w aplikacjach czasu rzeczywistego (np. RTX API firmy VenturCom).
47 Linux Historia Linuksa rozpoczęła się w 1991 roku, kiedy to fiński programista, Linus Torvalds poinformował o hobbystycznym tworzeniu przez siebie niedużego, wolnego systemu operacyjnego, przeznaczonego dla procesorów z rodzin i386, oraz i486. Linux początkowo działał na platformie i386, lecz później został przeniesiony na wiele innych platform, np. ARM, MIPS, PowerPC, Motorola. Jednymi z pierwszych dystrybucji Linuksa były opublikowane w 1993 roku Slackware Linux, czy założony miesiąc później Debian. Obecnie najpopularniejsze dystrybucje to Ubuntu, OpenSUSE, Fedora, Debian.
48 Linux Wydania jądra z parzystym drugorzędnym numerem wersji należą do serii stabilnych wydań: 1.0.x, 1.2.x, 2.0.x, 2.2.x, 2.4.x i obecna 2.6.x; wydania z nieparzystym drugorzędnym numerem wersji, np. seria 2.5.x, nazywane są rozwojowymi i nie są zalecane do celów produkcyjnych. Linux potrafi uruchamiać programy w formatach a.out oraz ELF. Dzięki zaznaczeniu przy kompilacji opcji Kernel support for MISC binaries może również uruchamiać inne programy, np. napisane w Javie poprzez maszynę wirtualną albo przeznaczone dla MS-DOS lub MS Windows poprzez emulatory.
49 Linux - jądro Jądro Linuksa jest w dużym stopniu zgodne ze standardami ANSI i POSIX, obsługuje wielozadaniowość, wielowątkowość, wielobieżność, pamięć wirtualną, biblioteki współdzielone, ładowanie na żądanie, współdzielony kod wykonywalny (ang. copy-on-write), dobre zarządzanie pamięcią i obsługę sieci TCP/IP.
50 Linux - jądro Jest ono jądrem monolitycznym z ładowalnymi modułami. Sterowniki urządzeń i rozszerzenia jądra zwykle pracują w trybie ring 0, z pełnym dostępem do sprzętu; nieliczne jednak działają w trybie użytkownika. W przeciwieństwie do typowych jąder monolitycznych, sterowniki urządzeń są zwykle kompilowane jako moduły, które można załadować i wyładować na działającym systemie. Podobnie, sterowniki mogą być wywłaszczone w określonych warunkach. Ta funkcja została dodana w celu poprawnej obsługi przerwań sprzętowych i systemów wieloprocesorowych.
51 Linux scheduler w jądrze 2.6 Posiada on 140 poziomów priorytetów, mniejsza wartość oznacza większy priorytet. Priorytety odpowiadając procesom czasu rzeczywistego, a pozostałe zwykłym procesom. Mamy dwie tablice list priorytetów dla każdego procesora: tablice procesów, którym pozostały jeszcze jakieś kwanty czasu i te, które już swoje kwanty czasu wykorzystały. Na listach mamy procesy o tym samym priorytecie, mamy liczniki elementów na danej liście i mapę bitową zajętości. 1 pod i-tym bitem oznacza, że lista o i-tym priorytecie jest nie pusta. Tablice te są dostępne poprzez wskaźniki, co czyni operację zmiany epoki niezwykle szybką: po prostu zmieniamy wskaźniki.
52 Linux scheduler w jądrze 2.6 W systemie dostępne są 3 różne strategie szeregowania, jedną dla zwykłych procesów i dwie dla procesów czasu rzeczywistego. Każdy proces zwykły ma dwa priorytety statyczny i dynamiczny. Statyczny priorytet zwany nice jest z zakresu , domyślnie jest on ustawiany na 0, ale można go zmienić poprzez wywołanie funkcji systemowej nice(). Procesy są wykonywane od najwyższych priorytetów, dokładnie jest wykonywany pierwszy z listy procesów o najwyższych priorytecie. Gdy wszystkie procesy wykorzystają kwanty czasu rozpoczyna się nowa epoka.
53 Linux scheduler w jądrze 2.6 W zależności od tego czy proces korzysta głównie z procesora, czy też głównie z operacji I/O jest przydzielany mu priorytet dynamiczny. Procesy często korzystające z I/O są nieco uprzywilejowane względem procesów korzystających głównie z procesora. Ten bonus wyliczany jest na podstawie czasu jaki proces pozostawał w uśpieniu względem maksymalnego czasu oczekiwania. Priorytet dynamiczny jest obliczany w momencie budzenia procesu i umieszczania go w Runqueue.
54 Linux scheduler w jądrze 2.6 Linux zapewnia jedynie soft RT. Oznacza to iż proces czasu rzeczywistego nie ma gwarancji, że konkretną pracę wykona w konkretnym czasie, czy też że w konkretnym momencie będzie miał on dostęp do procesora. Oznacza to jedynie, że w sytuacji gdy jakiś proces czasu rzeczywistego chce pracować, procesora nie dostaną pozostałe procesy. Brak możliwości zapewnienia pełnego RT wynika z wielu rzeczy: między innymi z tego iż nie wiemy ile czasu zajmie nam odczytanie strony pamięci (może ona być w cache'u procesora, może być w pamięci, lub trzeba ją będzie ściągnąć z dysku).
55 Linux scheduler w jądrze 2.6 Linux daje nam 2 strategie szeregowania procesów czasu rzeczywistego. Strategia FIFO działa następująco: proces czasu rzeczywistego, który otrzymał procesor, działa dotąd aż zrzeknie się go dobrowolnie, lub pojawi się proces z wyższych priorytetem, który go wydziedziczy. Oczywisty jest przypadek zagłodzenia, gdy dwa procesy czasu rzeczywistego o tym samym priorytecie chcą uzyskać czas procesora, a działa tylko jeden z nich. W strategii SCHED_RR procesy mają przydzielane kwanty czasu, działają aż do ich wykorzystania, po czym mają je przyznane ponownie i umieszczane są na końcu kolejki gotowych o danym priorytecie. Oznacza to, że jedynie procesy RT o najwyższym priorytecie dzielą między siebie procesor, podczas gdy pozostałe będą głodzone.
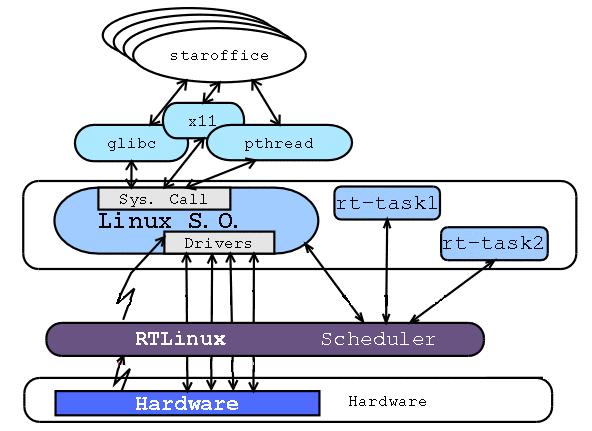
56 RTLinux RTLinux to rygorystyczny (twardy) system operacyjny czasu rzeczywistego, którego cechą charakterystyczną jest to, że współistnieją w nim: jądro czasu rzeczywistego RTCore i jądro Linuksa. Pod kontrolą małego jądra czasu rzeczywistego RTCore uruchomione jest jądro Linuksa jako wątek o najniższym priorytecie (idle thread). Obecnie istnieją dwie odmiany RTLinuksa: RTLinux/GPL, dostępna na licencji GPL i RTLinuxPro komercyjna.
57 RTLinux
58 RTLinux - przerwania Wirtualny mechanizm przerwań jest kluczowym elementem architektury RTLinuksa. Wszystkie przerwania sprzętowe są przechwytywane przez jądro RTCore. Jednocześnie emuluje ono kontroler przerwań na potrzeby Linuksa i Linux nadal działa tak, jakby docierały do niego przerwania sprzętowe. Każde nadchodzące przerwanie jest przechwytywane przez jądro RTCore. Jeśli jest dla niego zainstalowana procedura obsługi czasu rzeczywistego, to jest ona wywoływana.
59 RTLinux - przerwania W przeciwnym razie, o ile nie wykonuje się żadne zadanie krytyczne, przerwanie jest przekazywane do jądra Linuksa. Samodzielne jądro Linuksa czasem blokuje przerwania (np. przy synchronizacji). RTCore pamięta ustawiony przez nie stan bitu zezwolenia na przerwania. Jeśli jądro Linuksa wyłączy przerwania, to nadchodzące dla niego przerwania są oznaczane jako oczekujące i zostaną emulowane, gdy tylko Linux je odblokuje.
60 RTLinux zadania krytyczne Zadania krytyczne to programy użytkownika wykonywane w przestrzeni adresowej jądra RTCore, szeregowane przez planistę tego jądra. Umieszczenie zadań we wspólnej przestrzeni adresowej bez ochrony pamięci powoduje, że błędy w tych zadaniach mogą doprowadzić do załamania systemu. Taka decyzja przynosi jednak następujące korzyści istotne dla zadań czasu rzeczywistego: szybsze przełączanie kontekstu pozbawione narzutu na zmianę rejestru bazowego jednostki zarządzającej pamięcią i czyszczenia rejestrów TLB bezpośrednie dzielenie danych bez skomplikowanej komunikacji międzyprocesowej
61 RTLinux zadania krytyczne Zadania czasu rzeczywistego umieszczane są w ładowalnych modułach jądra. W trakcie inicjacji modułu zadanie są tworzone za pomocą standardowej funkcji pthread_create. Zadania mogą być wykonywane okresowo, jak również mogą być zawieszane i budzone z poziomu procedur obsługi przerwań.
62 RTLinux szeregowanie Program szeregujący jest zaimplementowany jako ładowalny moduł jądra RTCore, więc można napisać własny. Rate Monotonic Scheduling - Domyślny planista używa statycznego doboru priorytetów algorytmem RMS, zgodnie z którym im krótszy okres zadania, tym wyższy jego priorytet. Jest to algorytm optymalny w tym sensie, że jeśli zadanie nie jest szeregowalne (nie może być wypełnione w terminie) przez ten algorytm, to nie jest szeregowalne przez żaden algorytm używający statycznych priorytetów.
63 RTLinux szeregowanie Earliest Deadline First - Obecnie RTLinux jest dystrybuowany razem z dodatkowym modułem implementującym planistę z dynamicznym przydziałem priorytetów. Im bliższy nieprzekraczalny termin wykonania, tym wyższy priorytet. Zaletą tego algorytmu jest 100% ograniczenie szeregowalności, ale wadę stanowi narzut na obliczanie priorytetów. Zadania nieokresowe - ani RMS ani EDF nie gwarantują terminowego wypełnienia zadań nieokresowych zwanych sporadycznymi tzn. pojawiających się w dowolnym czasie. Algorytmy o nazwach Slot Shifting i Stack Stealing mają na celu lepszą obsługę zadań nieokresowych poprzez wykorzystanie wolnych cykli procesora pomiędzy zadaniami okresowymi.
64 RTLinux komunikacja międzyprocesowa Tylko zadania, na które nałożono twarde ograniczenia czasowe, działają jako zadania krytyczne. Pozostała praca wykonywana jest przez procesy Linuksa m.in. rozruch systemu, większość obsługi urządzeń, sieć, systemy plików itp. Jednak jako że wątek jądra Linuksa jest wywłaszczalny, zadania krytyczne nie mogą wywoływać jego funkcji systemowych. Niezbędna jest zatem komunikacja.
65 RTLinux komunikacja międzyprocesowa Kolejki czasu rzeczywistego RT-FIFO dostępne są w postaci ładowalnego modułu jądra. Są zaalokowane w przestrzeni jądra RTCore. Zadania krytyczne mogą je tworzyć, niszczyć, czytać i pisać. Operacje odczytu i zapisu są po stronie zadań krytycznych niepodzielne i nieblokujące, co rozwiązuje problem odwróconych priorytetów. Procesy Linuksa widzą te kolejki jako zwykłe urządzenia znakowe (/dev/rtf0 itd.), do których mają dostęp poprzez standardowe funkcje POSIXowe. Pamięć dzielona - niesekwencyjna wymiana danych między procesami Linuksa a zadaniami krytycznymi może przebiegać za pomocą pamięci dzielonej. Różne implementacje RTLinuksa używają różnych funkcji dostępowych do pamięci dzielonej (mmap() w wersji niekomercyjnej i shm_open(), shm_unlink() w wersji komercyjnej), ale zawsze są one zgodne ze standardem POSIX.
66 Xenomai Xenomai jest systemem czasu rzeczywistego współpracującym z jądrem linux a za pośrednictwem modułu Adeos. Dzięki modułowi adeos xenomai przechwytuje zdarzenia występujące w systemie, a następnie decyduje czy maja one zostać wykonane w jądrze linux a czy też w jądrze pracującym w czasie rzeczywistym Xenomai a. Xenomai ponadto posiada różne API które pozwalają na programowanie aplikacji czasu rzeczywistego. W systemie Xenomai zadania czasu rzeczywistego można uruchamiać w przestrzeni użytkownika i w przestrzeni jądra czasu rzeczywistego.
67 Xenomai
68 Xenomai Wspierane architektury ppc, blackfin, arm, x86, x86_64, ia64 i ppc64 wspierane API include POSIX b, VxWorks, psos+, VRTX and uitron
69 QNX neutrino Architektura systemu QNX jest modularna. Najważniejszym elementem systemu jest mikrojądro o bardzo małym rozmiarze. W zależności od potrzeb współpracuje ono z dodatkowymi modułami, takimi jak zarządca procesów, systemu plików, sieci, urządzeń wejścia-wyjścia itp. Budowa systemu z gotowych dyskretnych elementów umożliwia wybranie tylko tych modułów, które są w danym przypadku potrzebne. Pozwala to na zbudowanie całkowicie w oparciu o QNX sieci przemysłowej składającej się zarówno z dużych komputerów jak i końcowych sterowników wyposażonych jedynie w 256 kb pamięci RAM bez dysku i monitora, sterujących konkretnym urządzeniem.
70 QNX Serce systemu QNX stanowi mikrojadro o bardzo małym rozmiarze (około 10kB). Wykonuje ono jedynie 16 funkcji systemowych i zapewnia trzy rodzaje usług: szeregowanie i przełączanie procesów komunikacje miedzy procesami zarządzanie obsługa przerwań
71 QNX Wchodzący w skład jadra egzekutor ma 32 poziomy priorytetów, numerowanych od 0 (najniższy priorytet) do 31. Z tego dla programów uzytkownika dostepne sa wartosci Administrator systemu (użytkownik root) może uruchamiać procesy nadając im również wyższe priorytety: Priorytet nadany procesowi podczas tworzenia go można później zmienić za pomocą odpowiednich funkcji systemowych. Istnieje również możliwość pracy procesu z tzw. płynnym priorytetem, co wykorzystuje miedzy innymi zarzadca systemu plików.
72 QNX szeregowanie Procesy znajdujące sie na tym samym poziomie priorytetu mogą być szeregowane zgodnie z jednym z trzech różnych algorytmów: FIFO - do wykonania wybiera się najdłużej oczekujący gotowy proces. Wybrany proces wykonuje się aż do zakończenia lub zawieszenia. Karuzelowy - procesy wybiera się do wykonania kolejno, przy czym każdy z nich otrzymuje ograniczony kwant czasu (slice). Jeżeli wykonywany proces nie zakończy się lub nie zawiesi wcześniej, to w chwili wyczerpania kwantu system operacyjny wywłaszcza go i podejmuje wykonanie następnego procesu.
73 QNX szeregowanie Procesy znajdujące się na tym samym poziomie priorytetu mogą być szeregowane zgodnie z jednym z trzech różnych algorytmów: Adaptacyjny (dostosowujacy sie) - algorytm znany z UNIX a. Procesy wybiera się kolejno, podobnie jak w algorytmie karuzelowym. Po wyczerpaniu kwantu czasu system operacyjny wywłaszcza wykonywany proces i obniża jego priorytet o 1. Jeżeli wykonanie procesu o obniżonym priorytecie nie zostanie podjęte w ciągu 2 sekund, jego priorytet podnosi się o 1 (ale nigdy powyżej oryginalnego priorytetu). Proces zawieszony odzyskuje natychmiast swój oryginalny priorytet..
74 QNX komunikacja międzyzadaniowa Na poziomie jadra zaimplementowane zostały następujące mechanizmy komunikacji miedzyzadaniowej: przekazywanie komunikatów, sygnały pełnomocnicy (proxy). Mechanizm przesyłania komunikatów został zaprojektowany w ten sposób, aby nie zmuszać jadra do przechowywania dużej liczby wysłanych ale nie odebranych jeszcze komunikatów, oraz aby nie wymagał wielokrotnego kopiowania komunikatów przed dostarczeniem ich do adresatów. Jadro zajmuje się również wywoływaniem procedur obsługi przerwań dla procesów, które tego zażądały.
75 QNX komunikacja międzyzadaniowa Wszelkie pozostałe usługi systemowe realizowane są przez współpracujących z jadrem odpowiednich zarządców. Idea tego podejścia polega na udostępnieniu przez jadro jedynie zestawu podstawowych funkcji, w oparciu o które budowane są następnie funkcje usługowe wyższego poziomu. Procesy zarządców zasobów mogą być dynamicznie uruchamiane oraz usuwane w trakcie pracy systemu. W danej chwili mogą pracować tylko te, które są potrzebne. Jeżeli np. dany węzeł korzysta z lokalnego systemu plików (dyskietki) tylko sporadycznie, zarządca systemu plików możenie być stale obecny w pamięci, a jedynie uruchamiany w razie koniecznosci i niszczony po wykonaniu operacji wejsciawyjscia w celu zwolnienia zajmowanej przez niego pamieci.
76 Komunikacja procesów Jadro systemu QNX realizuje cztery mechanizmy komunikacji procesów: synchroniczny przekaz wiadomosci (message) podczas spotkania, synchronizacje za pomoca semaforów (semaphore), asynchroniczny przekaz depozytów (stałych wiadomosci) poprzez procesy depozytowe (proxy) sygnalizacje zdarzen (signal). Wszystkie mechanizmy - oprócz semaforów - mogą być wykorzystane do komunikacji procesów wykonywanych w różnych węzłach sieci. Dodatkowo, odpowiednie procesy systemowe umożliwiają buforowane przekazywanie danych miedzy procesami poprzez potoki (pipe) i kolejki (FIFO) oraz kolejki wiadomosci (message queue).
77 QNX - zastosowania Przykładowe zastosowania systemu QNX to: sterowanie elektronika atomowa, kierowanie systemem bezpieczeństwa nowojorskiej giełdy, monitorowanie ruchu w tunelu pod kanałem La Manche, testowanie silników odrzutowych.
projekt akademicki w Institute for Mining and Technology of New Mexico. Autor Victor Yodaiken FSMLabs komercyjna odmiana RTLinuxPro
 projekt akademicki w Institute for Mining and Technology of New Mexico. Autor Victor Yodaiken FSMLabs komercyjna odmiana RTLinuxPro Rygorystyczny (twardy) system operacyjny czasu rzeczywistego. Jego charakterystyczną
projekt akademicki w Institute for Mining and Technology of New Mexico. Autor Victor Yodaiken FSMLabs komercyjna odmiana RTLinuxPro Rygorystyczny (twardy) system operacyjny czasu rzeczywistego. Jego charakterystyczną
Prezentacja systemu RTLinux
 Prezentacja systemu RTLinux Podstawowe założenia RTLinux jest system o twardych ograniczeniach czasowych (hard real-time). Inspiracją dla twórców RTLinux a była architektura systemu MERT. W zamierzeniach
Prezentacja systemu RTLinux Podstawowe założenia RTLinux jest system o twardych ograniczeniach czasowych (hard real-time). Inspiracją dla twórców RTLinux a była architektura systemu MERT. W zamierzeniach
Jądro systemu operacyjnego
 Jądro systemu operacyjnego Jądro (ang. kernel) jest to podstawowa część systemu operacyjnego, która jest odpowiedzialna za wszystkie jego zadania. Zapewnia ono usługi systemowe takie jak: komunikacja między
Jądro systemu operacyjnego Jądro (ang. kernel) jest to podstawowa część systemu operacyjnego, która jest odpowiedzialna za wszystkie jego zadania. Zapewnia ono usługi systemowe takie jak: komunikacja między
Działanie systemu operacyjnego
 Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej I NIC sieci Pamięć operacyjna Przerwania Przerwania
Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej I NIC sieci Pamięć operacyjna Przerwania Przerwania
SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE
 SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE WINDOWS 1 SO i SK/WIN 007 Tryb rzeczywisty i chroniony procesora 2 SO i SK/WIN Wszystkie 32-bitowe procesory (386 i nowsze) mogą pracować w kilku trybach. Tryby pracy
SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE WINDOWS 1 SO i SK/WIN 007 Tryb rzeczywisty i chroniony procesora 2 SO i SK/WIN Wszystkie 32-bitowe procesory (386 i nowsze) mogą pracować w kilku trybach. Tryby pracy
Podstawy informatyki. System operacyjny. dr inż. Adam Klimowicz
 Podstawy informatyki System operacyjny dr inż. Adam Klimowicz System operacyjny OS (ang. Operating System) Program komputerowy bądź zbiór programów, który zarządza udostępnianiem zasobów komputera aplikacjom.
Podstawy informatyki System operacyjny dr inż. Adam Klimowicz System operacyjny OS (ang. Operating System) Program komputerowy bądź zbiór programów, który zarządza udostępnianiem zasobów komputera aplikacjom.
Działanie systemu operacyjnego
 Działanie systemu operacyjnego Budowa systemu komputerowego Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej Pamięć
Działanie systemu operacyjnego Budowa systemu komputerowego Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej Pamięć
Struktura systemu operacyjnego. Opracował: mgr Marek Kwiatkowski
 Struktura systemu operacyjnego Schemat budowy systemu operacyjnego model warstwowy Schemat budowy systemu operacyjnego części składowe Większość systemów operacyjnych opiera się o koncepcję jądra, która
Struktura systemu operacyjnego Schemat budowy systemu operacyjnego model warstwowy Schemat budowy systemu operacyjnego części składowe Większość systemów operacyjnych opiera się o koncepcję jądra, która
Procesy, wątki i zasoby
 Procesy, wątki i zasoby Koncepcja procesu i zasobu, Obsługa procesów i zasobów, Cykl zmian stanów procesu i kolejkowanie, Klasyfikacja zasobów, Wątki, Procesy i wątki we współczesnych systemach operacyjnych.
Procesy, wątki i zasoby Koncepcja procesu i zasobu, Obsługa procesów i zasobów, Cykl zmian stanów procesu i kolejkowanie, Klasyfikacja zasobów, Wątki, Procesy i wątki we współczesnych systemach operacyjnych.
Działanie systemu operacyjnego
 Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej sieci Pamięć operacyjna Przerwania Przerwania Przerwanie
Budowa systemu komputerowego Działanie systemu operacyjnego Jednostka centralna dysku Szyna systemowa (magistrala danych) drukarki pamięci operacyjnej sieci Pamięć operacyjna Przerwania Przerwania Przerwanie
SYSTEMY OPERACYJNE WYKLAD 6 - wątki
 Wrocław 2007 SYSTEMY OPERACYJNE WYKLAD 6 - wątki Paweł Skrobanek C-3, pok. 323 e-mail: pawel.skrobanek@pwr.wroc.pl www.equus.wroc.pl/studia.html 1 PLAN: 1. Wątki 2. Planowanie przydziału procesora (szeregowanie
Wrocław 2007 SYSTEMY OPERACYJNE WYKLAD 6 - wątki Paweł Skrobanek C-3, pok. 323 e-mail: pawel.skrobanek@pwr.wroc.pl www.equus.wroc.pl/studia.html 1 PLAN: 1. Wątki 2. Planowanie przydziału procesora (szeregowanie
Systemy operacyjne III
 Systemy operacyjne III WYKŁAD Jan Kazimirski Pamięć wirtualna Stronicowanie Pamięć podzielona na niewielki bloki Bloki procesu to strony a bloki fizyczne to ramki System operacyjny przechowuje dla każdego
Systemy operacyjne III WYKŁAD Jan Kazimirski Pamięć wirtualna Stronicowanie Pamięć podzielona na niewielki bloki Bloki procesu to strony a bloki fizyczne to ramki System operacyjny przechowuje dla każdego
4. Procesy pojęcia podstawowe
 4. Procesy pojęcia podstawowe 4.1 Czym jest proces? Proces jest czymś innym niż program. Program jest zapisem algorytmu wraz ze strukturami danych na których algorytm ten operuje. Algorytm zapisany bywa
4. Procesy pojęcia podstawowe 4.1 Czym jest proces? Proces jest czymś innym niż program. Program jest zapisem algorytmu wraz ze strukturami danych na których algorytm ten operuje. Algorytm zapisany bywa
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Definicja systemu operacyjnego (1) Miejsce,
Wprowadzenie. Dariusz Wawrzyniak. Miejsce, rola i zadania systemu operacyjnego w oprogramowaniu komputera
 Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego (2) Miejsce, rola i zadania systemu operacyjnego
Systemy operacyjne. Wprowadzenie. Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak
 Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
Wprowadzenie Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działania systemu operacyjnego
4. Procesy pojęcia podstawowe
 4. Procesy pojęcia podstawowe 4.1 Czym jest proces? Proces jest czymś innym niż program. Program jest zapisem algorytmu wraz ze strukturami danych na których algorytm ten operuje. Algorytm zapisany bywa
4. Procesy pojęcia podstawowe 4.1 Czym jest proces? Proces jest czymś innym niż program. Program jest zapisem algorytmu wraz ze strukturami danych na których algorytm ten operuje. Algorytm zapisany bywa
Mariusz Rudnicki PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO CZ.1
 Mariusz Rudnicki mariusz.rudnicki@eti.pg.gda.pl PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO CZ.1 Przedmiot PSCR Przedmiot PSCR Wykład do połowy semestru Laboratorium od połowy semestru Projekt Zaliczenie
Mariusz Rudnicki mariusz.rudnicki@eti.pg.gda.pl PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO CZ.1 Przedmiot PSCR Przedmiot PSCR Wykład do połowy semestru Laboratorium od połowy semestru Projekt Zaliczenie
SYSTEMY OPERACYJNE: STRUKTURY I FUNKCJE (opracowano na podstawie skryptu PP: Królikowski Z., Sajkowski M. 1992: Użytkowanie systemu operacyjnego UNIX)
") (opracowano na podstawie skryptu PP: Królikowski Z., Sajkowski M. 1992: Użytkowanie systemu operacyjnego UNIX) W informatyce występują ściśle obok siebie dwa pojęcia: sprzęt (ang. hardware) i oprogramowanie
(opracowano na podstawie skryptu PP: Królikowski Z., Sajkowski M. 1992: Użytkowanie systemu operacyjnego UNIX) W informatyce występują ściśle obok siebie dwa pojęcia: sprzęt (ang. hardware) i oprogramowanie
dr inż. Jarosław Forenc
 Informatyka 2 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr III, studia stacjonarne I stopnia Rok akademicki 2010/2011 Wykład nr 7 (24.01.2011) dr inż. Jarosław Forenc Rok akademicki
Informatyka 2 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr III, studia stacjonarne I stopnia Rok akademicki 2010/2011 Wykład nr 7 (24.01.2011) dr inż. Jarosław Forenc Rok akademicki
Zarządzanie procesorem
 Zarządzanie procesorem 1. Koncepcja procesu 2. Blok kontrolny procesu 3. Planowanie (szeregowanie) procesów! rodzaje planistów! kryteria planowania 4. Algorytmy planowania! FCFS! SJF! RR! planowanie priorytetowe!
Zarządzanie procesorem 1. Koncepcja procesu 2. Blok kontrolny procesu 3. Planowanie (szeregowanie) procesów! rodzaje planistów! kryteria planowania 4. Algorytmy planowania! FCFS! SJF! RR! planowanie priorytetowe!
Definicja systemu operacyjnego (1) Definicja systemu operacyjnego (2) Miejsce systemu operacyjnego w architekturze systemu komputerowego
 Definicja systemu operacyjnego (2) Miejsce systemu operacyjnego w architekturze systemu komputerowego") Systemy operacyjne wprowadzenie 1 Definicja systemu operacyjnego (1) Definicja systemu operacyjnego (2) System operacyjny jest zbiorem ręcznych i automatycznych procedur, które pozwalają grupie osób na
Systemy operacyjne wprowadzenie 1 Definicja systemu operacyjnego (1) Definicja systemu operacyjnego (2) System operacyjny jest zbiorem ręcznych i automatycznych procedur, które pozwalają grupie osób na
Działanie systemu operacyjnego
 Działanie systemu operacyjnego Budowa systemu komputerowego I NIC Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej
Działanie systemu operacyjnego Budowa systemu komputerowego I NIC Jednostka centralna Sterownik dysku Sterownik drukarki Sterownik sieci Szyna systemowa (magistrala danych) Sterownik pamięci operacyjnej
REAL-TIME LINUX. ZGODNOŚĆ Z POSIX ( PSE51 (minimal realtime system profile)
") KRÓTKO O HISTORII RT-LINUX STAN PRAWNY - NIEFORTUNNY PATENT INNE ROZWIĄZANIA ZGODNOŚĆ Z POSIX (1003.13 PSE51 (minimal realtime system profile) KLUCZOWE ELEMENTY KONCEPCJI RTL WIRTUALNY SYSTEM PRZERWAŃ
KRÓTKO O HISTORII RT-LINUX STAN PRAWNY - NIEFORTUNNY PATENT INNE ROZWIĄZANIA ZGODNOŚĆ Z POSIX (1003.13 PSE51 (minimal realtime system profile) KLUCZOWE ELEMENTY KONCEPCJI RTL WIRTUALNY SYSTEM PRZERWAŃ
Wprowadzenie do systemu Minix
 Opis powstał na podstawie pracy dyplomowej Adama Pogorzelskiego Opracowanie laboratoryjnej wersji systemu Minix 2.0 wykonanej w 1998 roku w IAiIS PW. 1. Wprowadzenie System operacyjny (SO) to program lub
Opis powstał na podstawie pracy dyplomowej Adama Pogorzelskiego Opracowanie laboratoryjnej wersji systemu Minix 2.0 wykonanej w 1998 roku w IAiIS PW. 1. Wprowadzenie System operacyjny (SO) to program lub
System komputerowy. System komputerowy
 System komputerowy System komputerowy System komputerowy układ współdziałających ze sobą (według pewnych zasad) dwóch składowych: sprzętu komputerowego (hardware) oraz oprogramowania (software) po to,
System komputerowy System komputerowy System komputerowy układ współdziałających ze sobą (według pewnych zasad) dwóch składowych: sprzętu komputerowego (hardware) oraz oprogramowania (software) po to,
Szeregowanie zadań w Linux Kernel 2.6. Daniel Górski Przemysław Jakubowski
 Szeregowanie zadań w Linux Kernel 2.6 Daniel Górski Przemysław Jakubowski Plan prezentacji Szeregowanie procesów - Szeregowanie - Cele szeregowania - Scheduler 2.6 - Struktury danych używane w 2.6 - Multiprocesorowość
Szeregowanie zadań w Linux Kernel 2.6 Daniel Górski Przemysław Jakubowski Plan prezentacji Szeregowanie procesów - Szeregowanie - Cele szeregowania - Scheduler 2.6 - Struktury danych używane w 2.6 - Multiprocesorowość
Mariusz Rudnicki PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO CZ.3
 Mariusz Rudnicki mariusz.rudnicki@eti.pg.gda.pl PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO CZ.3 Szeregowanie Omawiane zagadnienia Czym jest szeregowanie? W jakim celu stosuje się mechanizmy szeregowania?
Mariusz Rudnicki mariusz.rudnicki@eti.pg.gda.pl PROGRAMOWANIE SYSTEMÓW CZASU RZECZYWISTEGO CZ.3 Szeregowanie Omawiane zagadnienia Czym jest szeregowanie? W jakim celu stosuje się mechanizmy szeregowania?
Systemy operacyjne III
 Systemy operacyjne III WYKŁAD 2 Jan Kazimirski 1 Procesy w systemie operacyjnym 2 Proces Współczesne SO w większości są systemami wielozadaniowymi. W tym samym czasie SO obsługuje pewną liczbę zadań procesów
Systemy operacyjne III WYKŁAD 2 Jan Kazimirski 1 Procesy w systemie operacyjnym 2 Proces Współczesne SO w większości są systemami wielozadaniowymi. W tym samym czasie SO obsługuje pewną liczbę zadań procesów
Wykład 6. Planowanie (szeregowanie) procesów (ang. process scheduling) Wojciech Kwedlo, Wykład z Systemów Operacyjnych -1- Wydział Informatyki PB
 procesów (ang. process scheduling) Wojciech Kwedlo, Wykład z Systemów Operacyjnych -1- Wydział Informatyki PB") Wykład 6 Planowanie (szeregowanie) procesów (ang. process scheduling) Wojciech Kwedlo, Wykład z Systemów Operacyjnych -1- Wydział Informatyki PB Rodzaje planowania Planowanie długoterminowe. Decyzja o
Wykład 6 Planowanie (szeregowanie) procesów (ang. process scheduling) Wojciech Kwedlo, Wykład z Systemów Operacyjnych -1- Wydział Informatyki PB Rodzaje planowania Planowanie długoterminowe. Decyzja o
Zarządzanie procesami i wątkami
 SOE - Systemy Operacyjne Wykład 4 Zarządzanie procesami i wątkami dr inŝ. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Pojęcie procesu (1) Program zbiór instrukcji dla procesora
SOE - Systemy Operacyjne Wykład 4 Zarządzanie procesami i wątkami dr inŝ. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Pojęcie procesu (1) Program zbiór instrukcji dla procesora
Wprowadzenie do systemów operacyjnych
 SOE - Systemy Operacyjne Wykład 1 Wprowadzenie do systemów operacyjnych dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW System komputerowy Podstawowe pojęcia System operacyjny
SOE - Systemy Operacyjne Wykład 1 Wprowadzenie do systemów operacyjnych dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW System komputerowy Podstawowe pojęcia System operacyjny
Planowanie przydziału procesora
 Planowanie przydziału procesora Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Komponenty jądra związane z szeregowaniem Ogólna koncepcja planowania Kryteria oceny uszeregowania Algorytmy
Planowanie przydziału procesora Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Komponenty jądra związane z szeregowaniem Ogólna koncepcja planowania Kryteria oceny uszeregowania Algorytmy
Struktura i funkcjonowanie komputera pamięć komputerowa, hierarchia pamięci pamięć podręczna. System operacyjny. Zarządzanie procesami
 Rok akademicki 2015/2016, Wykład nr 6 2/21 Plan wykładu nr 6 Informatyka 1 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr II, studia niestacjonarne I stopnia Rok akademicki 2015/2016
Rok akademicki 2015/2016, Wykład nr 6 2/21 Plan wykładu nr 6 Informatyka 1 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr II, studia niestacjonarne I stopnia Rok akademicki 2015/2016
dr inż. Konrad Sobolewski Politechnika Warszawska Informatyka 1
 dr inż. Konrad Sobolewski Politechnika Warszawska Informatyka 1 Cel wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działanie systemu operacyjnego
dr inż. Konrad Sobolewski Politechnika Warszawska Informatyka 1 Cel wykładu Definicja, miejsce, rola i zadania systemu operacyjnego Klasyfikacja systemów operacyjnych Zasada działanie systemu operacyjnego
Podstawowe zagadnienia
 SWB - Systemy operacyjne w systemach wbudowanych - wykład 14 asz 1 Podstawowe zagadnienia System operacyjny System czasu rzeczywistego Systemy wbudowane a system operacyjny Przykłady systemów operacyjnych
SWB - Systemy operacyjne w systemach wbudowanych - wykład 14 asz 1 Podstawowe zagadnienia System operacyjny System czasu rzeczywistego Systemy wbudowane a system operacyjny Przykłady systemów operacyjnych
Planowanie przydziału procesora
 Dariusz Wawrzyniak Plan wykładu Komponenty jądra związane z szeregowaniem Ogólna koncepcja planowania Kryteria oceny algorytmów planowania Algorytmy planowania (2) 1 Komponenty jądra w planowaniu Planista
Dariusz Wawrzyniak Plan wykładu Komponenty jądra związane z szeregowaniem Ogólna koncepcja planowania Kryteria oceny algorytmów planowania Algorytmy planowania (2) 1 Komponenty jądra w planowaniu Planista
IdyllaOS. Prosty, alternatywny system operacyjny. www.idyllaos.org. Autor: Grzegorz Gliński. Kontakt: milyges@gmail.com
 IdyllaOS www.idyllaos.org Prosty, alternatywny system operacyjny Autor: Grzegorz Gliński Kontakt: milyges@gmail.com Co to jest IdyllaOS? IdyllaOS jest to mały, prosty, uniksopodobny, wielozadaniowy oraz
IdyllaOS www.idyllaos.org Prosty, alternatywny system operacyjny Autor: Grzegorz Gliński Kontakt: milyges@gmail.com Co to jest IdyllaOS? IdyllaOS jest to mały, prosty, uniksopodobny, wielozadaniowy oraz
LEKCJA TEMAT: Zasada działania komputera.
 LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
Technika mikroprocesorowa. Systemy operacyjne czasu rzeczywistego
 System operacyjny czasu rzeczywistego (RTOS Real Time Operating System) jest programem bazowym ułatwiającym tworzenie programu użytkowego systemu mikroprocesorowego. System operacyjny czasu rzeczywistego
System operacyjny czasu rzeczywistego (RTOS Real Time Operating System) jest programem bazowym ułatwiającym tworzenie programu użytkowego systemu mikroprocesorowego. System operacyjny czasu rzeczywistego
Księgarnia PWN: Włodzimierz Stanisławski, Damian Raczyński - Programowanie systemowe mikroprocesorów rodziny x86
 Księgarnia PWN: Włodzimierz Stanisławski, Damian Raczyński - Programowanie systemowe mikroprocesorów rodziny x86 Spis treści Wprowadzenie... 11 1. Architektura procesorów rodziny x86... 17 1.1. Model procesorów
Księgarnia PWN: Włodzimierz Stanisławski, Damian Raczyński - Programowanie systemowe mikroprocesorów rodziny x86 Spis treści Wprowadzenie... 11 1. Architektura procesorów rodziny x86... 17 1.1. Model procesorów
Projektowanie oprogramowania systemów PROCESY I ZARZĄDZANIE PROCESAMI
 Projektowanie oprogramowania systemów PROCESY I ZARZĄDZANIE PROCESAMI plan Cechy, właściwości procesów Multitasking Scheduling Fork czym jest proces? Działającą instancją programu Program jest kolekcją
Projektowanie oprogramowania systemów PROCESY I ZARZĄDZANIE PROCESAMI plan Cechy, właściwości procesów Multitasking Scheduling Fork czym jest proces? Działającą instancją programu Program jest kolekcją
Mariusz Rudnicki PROGRAMOWANIE WSPÓŁBIEŻNE I SYSTEMY CZASU RZECZYWISTEGO CZ.3
 Mariusz Rudnicki mariusz.rudnicki@eti.pg.edu.pl PROGRAMOWANIE WSPÓŁBIEŻNE I SYSTEMY CZASU RZECZYWISTEGO CZ.3 Szeregowanie Omawiane zagadnienia Czym jest szeregowanie? W jakim celu stosuje się mechanizmy
Mariusz Rudnicki mariusz.rudnicki@eti.pg.edu.pl PROGRAMOWANIE WSPÓŁBIEŻNE I SYSTEMY CZASU RZECZYWISTEGO CZ.3 Szeregowanie Omawiane zagadnienia Czym jest szeregowanie? W jakim celu stosuje się mechanizmy
Systemy wbudowane. Systemy operacyjne czasu rzeczywistego
 Systemy wbudowane Systemy operacyjne czasu rzeczywistego Definicje System czasu rzeczywistego to taki, w którym wynik przetwarzania nie zależy tylko i wyłącznie od jego logicznej poprawności, ale również
Systemy wbudowane Systemy operacyjne czasu rzeczywistego Definicje System czasu rzeczywistego to taki, w którym wynik przetwarzania nie zależy tylko i wyłącznie od jego logicznej poprawności, ale również
Przykłady implementacji planowania przydziału procesora
 Przykłady implementacji planowania przydziału procesora Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Tradycyjne szeregowanie w systemie UNIX Szeregowanie w systemie Linux z jądrem
Przykłady implementacji planowania przydziału procesora Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Tradycyjne szeregowanie w systemie UNIX Szeregowanie w systemie Linux z jądrem
Systemy operacyjne. Paweł Pełczyński
 Systemy operacyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie Struktura systemów operacyjnych Procesy i Wątki Komunikacja międzyprocesowa Szeregowanie procesów Zarządzanie
Systemy operacyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie Struktura systemów operacyjnych Procesy i Wątki Komunikacja międzyprocesowa Szeregowanie procesów Zarządzanie
4. Procesy pojęcia podstawowe
 4. Procesy pojęcia podstawowe 4.1 Czym jest proces? Proces jest czymś innym niż program. Program jest zapisem algorytmu wraz ze strukturami danych na których algorytm ten operuje. Algorytm zapisany bywa
4. Procesy pojęcia podstawowe 4.1 Czym jest proces? Proces jest czymś innym niż program. Program jest zapisem algorytmu wraz ze strukturami danych na których algorytm ten operuje. Algorytm zapisany bywa
Od uczestników szkolenia wymagana jest umiejętność programowania w języku C oraz podstawowa znajomość obsługi systemu Linux.
 Kod szkolenia: Tytuł szkolenia: PS/LINUX Programowanie systemowe w Linux Dni: 5 Opis: Adresaci szkolenia Szkolenie adresowane jest do programistów tworzących aplikacje w systemie Linux, którzy chcą poznać
Kod szkolenia: Tytuł szkolenia: PS/LINUX Programowanie systemowe w Linux Dni: 5 Opis: Adresaci szkolenia Szkolenie adresowane jest do programistów tworzących aplikacje w systemie Linux, którzy chcą poznać
Sieciowe Systemy Operacyjne
 1 Sieciowe Systemy Operacyjne 1. Etapy rozwoju systemów komputerowych System scentralizowany System sieciowy System rozproszony 1.1 System scentralizowany Zastosowane duże komputery (mainframes ) Użytkownicy
1 Sieciowe Systemy Operacyjne 1. Etapy rozwoju systemów komputerowych System scentralizowany System sieciowy System rozproszony 1.1 System scentralizowany Zastosowane duże komputery (mainframes ) Użytkownicy
Planowanie przydziału procesora CPU scheduling. Koncepcja szeregowania. Planista przydziału procesora (planista krótkoterminowy) CPU Scheduler
 CPU Scheduler") Planowanie przydziału procesora CPU scheduling Koncepcja szeregowania Koncepcja szeregowania (Basic Concepts) Kryteria szeregowania (Scheduling Criteria) Algorytmy szeregowania (Scheduling Algorithms)
Planowanie przydziału procesora CPU scheduling Koncepcja szeregowania Koncepcja szeregowania (Basic Concepts) Kryteria szeregowania (Scheduling Criteria) Algorytmy szeregowania (Scheduling Algorithms)
Systemy wbudowane - wykład 9. Systemy czasu rzeczywistego Notes. Systemy czasu rzeczywistego Notes. Systemy czasu rzeczywistego Notes.
 Systemy wbudowane - wykład 9 Przemek Błaśkiewicz 26 maja 2017 1 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; 2 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; system
Systemy wbudowane - wykład 9 Przemek Błaśkiewicz 26 maja 2017 1 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; 2 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; system
przydziału procesora Przykłady implementacji planowania przydziału procesora Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak
 Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Tradycyjne szeregowanie w systemie UNIX Szeregowanie w systemie Linux z jądrem 2.6 Szeregowanie w systemie Windows 2000/XP (2) Szeregowanie
Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Tradycyjne szeregowanie w systemie UNIX Szeregowanie w systemie Linux z jądrem 2.6 Szeregowanie w systemie Windows 2000/XP (2) Szeregowanie
Programowanie współbieżne Wykład 2. Iwona Kochańska
 Programowanie współbieżne Wykład 2 Iwona Kochańska Miary skalowalności algorytmu równoległego Przyspieszenie Stały rozmiar danych N T(1) - czas obliczeń dla najlepszego algorytmu sekwencyjnego T(p) - czas
Programowanie współbieżne Wykład 2 Iwona Kochańska Miary skalowalności algorytmu równoległego Przyspieszenie Stały rozmiar danych N T(1) - czas obliczeń dla najlepszego algorytmu sekwencyjnego T(p) - czas
Struktury systemów operacyjnych
 Struktury systemów operacyjnych Jan Tuziemski Część slajdów to zmodyfiowane slajdy ze strony os-booi.com copyright Silberschatz, Galvin and Gagne, 2013 Cele wykładu 1. Opis usług dostarczanych przez OS
Struktury systemów operacyjnych Jan Tuziemski Część slajdów to zmodyfiowane slajdy ze strony os-booi.com copyright Silberschatz, Galvin and Gagne, 2013 Cele wykładu 1. Opis usług dostarczanych przez OS
Budowa systemów komputerowych
 Budowa systemów komputerowych Krzysztof Patan Instytut Sterowania i Systemów Informatycznych Uniwersytet Zielonogórski k.patan@issi.uz.zgora.pl Współczesny system komputerowy System komputerowy składa
Budowa systemów komputerowych Krzysztof Patan Instytut Sterowania i Systemów Informatycznych Uniwersytet Zielonogórski k.patan@issi.uz.zgora.pl Współczesny system komputerowy System komputerowy składa
Procesy, zasoby i wątki
 Procesy, zasoby i wątki Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Koncepcja procesu i zasobu Obsługa procesów i zasobów Cykl zmian stanów procesu i kolejkowanie Klasyfikacja zasobów
Procesy, zasoby i wątki Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Koncepcja procesu i zasobu Obsługa procesów i zasobów Cykl zmian stanów procesu i kolejkowanie Klasyfikacja zasobów
Procesy, zasoby i wątki
 Dariusz Wawrzyniak Koncepcja procesu i zasobu Obsługa procesów i zasobów Cykl zmian stanów procesu i kolejkowanie Klasyfikacja zasobów Wątki Procesy i wątki we współczesnych systemach operacyjnych Plan
Dariusz Wawrzyniak Koncepcja procesu i zasobu Obsługa procesów i zasobów Cykl zmian stanów procesu i kolejkowanie Klasyfikacja zasobów Wątki Procesy i wątki we współczesnych systemach operacyjnych Plan
Procesy, zasoby i wątki
 Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Koncepcja procesu i zasobu Obsługa procesów i zasobów Cykl zmian stanów procesu i kolejkowanie Klasyfikacja zasobów Wątki Procesy i wątki
Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Koncepcja procesu i zasobu Obsługa procesów i zasobów Cykl zmian stanów procesu i kolejkowanie Klasyfikacja zasobów Wątki Procesy i wątki
projektowanie systemu
 projektowanie systemu cel użytkownika: system operacyjny powinien być wygodny, łatwy w użyciu, prosty do nauczenia, niezawodny, bezpieczny i szybki cel producenta: system operacyjny powinien być łatwy
projektowanie systemu cel użytkownika: system operacyjny powinien być wygodny, łatwy w użyciu, prosty do nauczenia, niezawodny, bezpieczny i szybki cel producenta: system operacyjny powinien być łatwy
Systemy operacyjne II
 Systemy operacyjne II Wojciech Kwedlo Wydział Informatyki PB, p. 205 wkwedlo@ii.pb.bialystok.pl aragorn.pb.bialystok.pl/~wkwedlo Pracownia specjalistyczna: Wojciech Kwedlo Krzysztof Bandurski Wojciech
Systemy operacyjne II Wojciech Kwedlo Wydział Informatyki PB, p. 205 wkwedlo@ii.pb.bialystok.pl aragorn.pb.bialystok.pl/~wkwedlo Pracownia specjalistyczna: Wojciech Kwedlo Krzysztof Bandurski Wojciech
5. Model komunikujących się procesów, komunikaty
 Jędrzej Ułasiewicz str. 1 5. Model komunikujących się procesów, komunikaty Obecnie stosuje się następujące modele przetwarzania: Model procesów i komunikatów Model procesów komunikujących się poprzez pamięć
Jędrzej Ułasiewicz str. 1 5. Model komunikujących się procesów, komunikaty Obecnie stosuje się następujące modele przetwarzania: Model procesów i komunikatów Model procesów komunikujących się poprzez pamięć
Procesy i wątki. Blok kontrolny procesu. Proces. Proces - elementy. Stan procesu
 Proces Procesy i wątki Proces jest wykonywanym programem. Wykonanie procesu musi przebiegać w sposób sekwencyjny ( w dowolnej chwili na zamówienie naszego procesu może być wykonany co najwyżej jeden rozkaz
Proces Procesy i wątki Proces jest wykonywanym programem. Wykonanie procesu musi przebiegać w sposób sekwencyjny ( w dowolnej chwili na zamówienie naszego procesu może być wykonany co najwyżej jeden rozkaz
PROGRAMOWANIE SYSTEMÓW WBUDOWANYCH
 PROGRAMOWANIE SYSTEMÓW WBUDOWANYCH SCHEDULING Mariusz Rudnicki mariusz.rudnicki@eti.pg.edu.pl Programowanie Systemów Wbudowanych 1/40 SZEREGOWANIE ZAGADNIENIA Czym jest szeregowanie? W jakim celu stosuje
PROGRAMOWANIE SYSTEMÓW WBUDOWANYCH SCHEDULING Mariusz Rudnicki mariusz.rudnicki@eti.pg.edu.pl Programowanie Systemów Wbudowanych 1/40 SZEREGOWANIE ZAGADNIENIA Czym jest szeregowanie? W jakim celu stosuje
Podstawy Informatyki Systemy operacyjne
 Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Definicje systemu operacyjnego Zadania systemu operacyjnego Klasyfikacja systemów operacyjnych 2 Zasoby systemu komputerowego
Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Definicje systemu operacyjnego Zadania systemu operacyjnego Klasyfikacja systemów operacyjnych 2 Zasoby systemu komputerowego
1. Etapy rozwoju systemów komputerowych
 1 Sieciowe Systemy Operacyjne Wprowadzenie do wykładu, podstawowe definicje, rola 1 systemu operacyjnego Procesy POSIX, zarządzanie procesami 2 Pliki, komunikacja przez pliki, blokowanie 1 Łącza nazwane
1 Sieciowe Systemy Operacyjne Wprowadzenie do wykładu, podstawowe definicje, rola 1 systemu operacyjnego Procesy POSIX, zarządzanie procesami 2 Pliki, komunikacja przez pliki, blokowanie 1 Łącza nazwane
2013-04-25. Czujniki obiektowe Sterowniki przemysłowe
 Ogólne informacje o systemach komputerowych stosowanych w sterowaniu ruchem funkcje, właściwości Sieci komputerowe w sterowaniu informacje ogólne, model TCP/IP, protokoły warstwy internetowej i transportowej
Ogólne informacje o systemach komputerowych stosowanych w sterowaniu ruchem funkcje, właściwości Sieci komputerowe w sterowaniu informacje ogólne, model TCP/IP, protokoły warstwy internetowej i transportowej
U M L. System operacyjny Linux zagnieżdżony w zewnętrznym systemie operacyjnym (Linux)
") http://user-mode-linux.sourceforge.net/ System operacyjny Linux zagnieżdżony w zewnętrznym systemie operacyjnym (Linux) Autor: Jeff Dike Koncepcja powstała w 1999 r. Początkowo jako patch do jądra 2.0
http://user-mode-linux.sourceforge.net/ System operacyjny Linux zagnieżdżony w zewnętrznym systemie operacyjnym (Linux) Autor: Jeff Dike Koncepcja powstała w 1999 r. Początkowo jako patch do jądra 2.0
Zarządzanie pamięcią operacyjną
 SOE Systemy Operacyjne Wykład 7 Zarządzanie pamięcią operacyjną dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Hierarchia pamięci czas dostępu Rejestry Pamięć podręczna koszt
SOE Systemy Operacyjne Wykład 7 Zarządzanie pamięcią operacyjną dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Hierarchia pamięci czas dostępu Rejestry Pamięć podręczna koszt
Fazy procesora i wejścia-wyjścia. Planowanie przydziału procesora. Czasy faz procesora. Planowanie przydziału procesora
 Planowanie przydziału procesora W pamięci operacyjnej znajduje się kilka procesów jednocześnie. Kiedy jakiś proces musi czekać, system operacyjny odbiera mu procesor i oddaje do dyspozycji innego procesu.
Planowanie przydziału procesora W pamięci operacyjnej znajduje się kilka procesów jednocześnie. Kiedy jakiś proces musi czekać, system operacyjny odbiera mu procesor i oddaje do dyspozycji innego procesu.
Systemy czasu rzeczywistego. Systemy czasu rzeczywistego. Systemy czasu rzeczywistego. Systemy czasu rzeczywistego - przykłady
 Systemy czasu rzeczywistego Definicja IEEE: System czasu rzeczywistego (real time) to system, którego poprawność działania zależy nie tylko od poprawności logicznych rezultatów, lecz również od czasu,
Systemy czasu rzeczywistego Definicja IEEE: System czasu rzeczywistego (real time) to system, którego poprawność działania zależy nie tylko od poprawności logicznych rezultatów, lecz również od czasu,
Architektury systemów czasu rzeczywistego RTOS. Wykonał: Bartłomiej Bugański
 Architektury systemów czasu rzeczywistego RTOS Wykonał: Bartłomiej Bugański System operacyjny czasu rzeczywistego ( ang. Real-Time Operating System - RTOS) to komputerowy system operacyjny, który został
Architektury systemów czasu rzeczywistego RTOS Wykonał: Bartłomiej Bugański System operacyjny czasu rzeczywistego ( ang. Real-Time Operating System - RTOS) to komputerowy system operacyjny, który został
SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE
 SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE WINDOWS 1 SO i SK/WIN 005 Plik wymiany Pamięć wirtualna 2 SO i SK/WIN Plik wymiany - rodzaj pamięci wirtualnej komputerów. Plik ten służy do tymczasowego przechowywania
SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE WINDOWS 1 SO i SK/WIN 005 Plik wymiany Pamięć wirtualna 2 SO i SK/WIN Plik wymiany - rodzaj pamięci wirtualnej komputerów. Plik ten służy do tymczasowego przechowywania
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
Planowanie przydziału procesora
 Planowanie przydziału procesora W pamięci operacyjnej znajduje się kilka procesów jednocześnie. Kiedy jakiś proces musi czekać, system operacyjny odbiera mu procesor i oddaje do dyspozycji innego procesu.
Planowanie przydziału procesora W pamięci operacyjnej znajduje się kilka procesów jednocześnie. Kiedy jakiś proces musi czekać, system operacyjny odbiera mu procesor i oddaje do dyspozycji innego procesu.
Proces y i y w i ąt ą ki
 Procesy i wątki Proces Proces jest wykonywanym programem. Wykonanie procesu musi przebiegać w sposób sekwencyjny ( w dowolnej chwili na zamówienie naszego procesu może być wykonany co najwyżej jeden rozkaz
Procesy i wątki Proces Proces jest wykonywanym programem. Wykonanie procesu musi przebiegać w sposób sekwencyjny ( w dowolnej chwili na zamówienie naszego procesu może być wykonany co najwyżej jeden rozkaz
Przerwania, polling, timery - wykład 9
 SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
ARCHITEKTURA PROCESORA,
 ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
Systemy operacyjne. Systemy operacyjne. Systemy operacyjne. Zadania systemu operacyjnego. Abstrakcyjne składniki systemu. System komputerowy
 Systemy operacyjne Systemy operacyjne Dr inż. Ignacy Pardyka Literatura Siberschatz A. i inn. Podstawy systemów operacyjnych, WNT, Warszawa Skorupski A. Podstawy budowy i działania komputerów, WKiŁ, Warszawa
Systemy operacyjne Systemy operacyjne Dr inż. Ignacy Pardyka Literatura Siberschatz A. i inn. Podstawy systemów operacyjnych, WNT, Warszawa Skorupski A. Podstawy budowy i działania komputerów, WKiŁ, Warszawa
Stronicowanie w systemie pamięci wirtualnej
 Pamięć wirtualna Stronicowanie w systemie pamięci wirtualnej Stronicowanie z wymianą stron pomiędzy pamięcią pierwszego i drugiego rzędu. Zalety w porównaniu z prostym stronicowaniem: rozszerzenie przestrzeni
Pamięć wirtualna Stronicowanie w systemie pamięci wirtualnej Stronicowanie z wymianą stron pomiędzy pamięcią pierwszego i drugiego rzędu. Zalety w porównaniu z prostym stronicowaniem: rozszerzenie przestrzeni
Szeregowanie zadań we współczesnych systemach operacyjnych. Szeregowanie zadań w Linux Kernel 2.6
 Daniel Górski Przemysław Jakubowski Szeregowanie zadań we współczesnych systemach operacyjnych. Szeregowanie zadań w Linux Kernel 2.6 Slajd 3: Wstęp do szeregowania. Z szeregowaniem mamy do czynienia w
Daniel Górski Przemysław Jakubowski Szeregowanie zadań we współczesnych systemach operacyjnych. Szeregowanie zadań w Linux Kernel 2.6 Slajd 3: Wstęp do szeregowania. Z szeregowaniem mamy do czynienia w
Zarządzanie pamięcią operacyjną
 Dariusz Wawrzyniak Plan wykładu Pamięć jako zasób systemu komputerowego hierarchia pamięci przestrzeń owa Wsparcie dla zarządzania pamięcią na poziomie architektury komputera Podział i przydział pamięci
Dariusz Wawrzyniak Plan wykładu Pamięć jako zasób systemu komputerowego hierarchia pamięci przestrzeń owa Wsparcie dla zarządzania pamięcią na poziomie architektury komputera Podział i przydział pamięci
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Projektowanie i użytkowanie systemów operacyjnych Rok akademicki: 2013/2014 Kod: EAR-2-324-n Punkty ECTS: 5 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek:
Nazwa modułu: Projektowanie i użytkowanie systemów operacyjnych Rok akademicki: 2013/2014 Kod: EAR-2-324-n Punkty ECTS: 5 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek:
Systemy operacyjne III
 Systemy operacyjne III WYKŁAD 3 Jan Kazimirski 1 Współbieżność 2 Współbieżność Wielozadaniowość - zarządzanie wieloma procesami w ramach jednego CPU Wieloprocesorowość - zarządzanie wieloma zadaniami w
Systemy operacyjne III WYKŁAD 3 Jan Kazimirski 1 Współbieżność 2 Współbieżność Wielozadaniowość - zarządzanie wieloma procesami w ramach jednego CPU Wieloprocesorowość - zarządzanie wieloma zadaniami w
Informatyka, systemy, sieci komputerowe
 Informatyka, systemy, sieci komputerowe Systemy operacyjne wykład 2 Procesy i wątki issk 1 SO koncepcja procesu i zasobu Proces jest elementarną jednostką pracy zarządzaną przez system operacyjny, wykonującym
Informatyka, systemy, sieci komputerowe Systemy operacyjne wykład 2 Procesy i wątki issk 1 SO koncepcja procesu i zasobu Proces jest elementarną jednostką pracy zarządzaną przez system operacyjny, wykonującym
Systemy czasu rzeczywistego. Systemy czasu rzeczywistego. Systemy czasu rzeczywistego. Systemy czasu rzeczywistego - przykłady
 Systemy czasu rzeczywistego Definicja IEEE: System czasu rzeczywistego (real time) to system, którego poprawność działania zależy nie tylko od poprawności logicznych rezultatów, lecz również od czasu,
Systemy czasu rzeczywistego Definicja IEEE: System czasu rzeczywistego (real time) to system, którego poprawność działania zależy nie tylko od poprawności logicznych rezultatów, lecz również od czasu,
Mechanizmy pracy równoległej. Jarosław Kuchta
 Mechanizmy pracy równoległej Jarosław Kuchta Zagadnienia Algorytmy wzajemnego wykluczania algorytm Dekkera Mechanizmy niskopoziomowe przerwania mechanizmy ochrony pamięci instrukcje specjalne Mechanizmy
Mechanizmy pracy równoległej Jarosław Kuchta Zagadnienia Algorytmy wzajemnego wykluczania algorytm Dekkera Mechanizmy niskopoziomowe przerwania mechanizmy ochrony pamięci instrukcje specjalne Mechanizmy
Systemy operacyjne III
 Systemy operacyjne III Jan Kazimirski 1 Opis zajęć Prezentacja budowy i zasad działania współczesnego systemu operacyjnego Prezentacja podstawowych elementów systemów operacyjnych i zasad ich implementacji
Systemy operacyjne III Jan Kazimirski 1 Opis zajęć Prezentacja budowy i zasad działania współczesnego systemu operacyjnego Prezentacja podstawowych elementów systemów operacyjnych i zasad ich implementacji
Architektura i administracja systemów operacyjnych
 Architektura i administracja systemów operacyjnych Wykład 1 Jan Tuziemski Część slajdów to zmodyfiowane slajdy ze strony os-booi.com copyright Silberschatz, Galvin and Gagne, 2013 Informacje wstępne Prowadzący
Architektura i administracja systemów operacyjnych Wykład 1 Jan Tuziemski Część slajdów to zmodyfiowane slajdy ze strony os-booi.com copyright Silberschatz, Galvin and Gagne, 2013 Informacje wstępne Prowadzący
Pytania do treści wykładów:
 Pytania do treści wykładów: Wprowadzenie: 1. Jakie zadania zarządzania realizowane są dla następujących zasobów: a) procesor, b) pamięć, c) plik? 2. W jaki sposób przekazywane jest sterowanie do jądra
Pytania do treści wykładów: Wprowadzenie: 1. Jakie zadania zarządzania realizowane są dla następujących zasobów: a) procesor, b) pamięć, c) plik? 2. W jaki sposób przekazywane jest sterowanie do jądra
Planowanie przydziału procesora
 Planowanie przydziału procesora Ogólna koncepcja planowania Tryb decyzji określa moment czasu, w którym oceniane i porównywane są priorytety procesów i dokonywany jest wybór procesu do wykonania. Funkcja
Planowanie przydziału procesora Ogólna koncepcja planowania Tryb decyzji określa moment czasu, w którym oceniane i porównywane są priorytety procesów i dokonywany jest wybór procesu do wykonania. Funkcja
POSIX ang. Portable Operating System Interface for Unix
 POSIX ang. Portable Operating System Interface for Unix POSIX: próba standaryzacji różnych dystrybucji systemu operacyjnego UNIX, Początek prac 1985 r. pod auspicjami IEEE. POSIX IEEE 1003, Obecnie rozwojem
POSIX ang. Portable Operating System Interface for Unix POSIX: próba standaryzacji różnych dystrybucji systemu operacyjnego UNIX, Początek prac 1985 r. pod auspicjami IEEE. POSIX IEEE 1003, Obecnie rozwojem
Architektura komputerów
 Architektura komputerów Tydzień 12 Wspomaganie systemu operacyjnego: pamięć wirtualna Partycjonowanie Pamięć jest dzielona, aby mogło korzystać z niej wiele procesów. Dla jednego procesu przydzielana jest
Architektura komputerów Tydzień 12 Wspomaganie systemu operacyjnego: pamięć wirtualna Partycjonowanie Pamięć jest dzielona, aby mogło korzystać z niej wiele procesów. Dla jednego procesu przydzielana jest
Urządzenia wejścia-wyjścia
 Urządzenia wejścia-wyjścia Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Klasyfikacja urządzeń wejścia-wyjścia Struktura mechanizmu wejścia-wyjścia (sprzętu i oprogramowania) Interakcja
Urządzenia wejścia-wyjścia Wykład prowadzą: Jerzy Brzeziński Dariusz Wawrzyniak Plan wykładu Klasyfikacja urządzeń wejścia-wyjścia Struktura mechanizmu wejścia-wyjścia (sprzętu i oprogramowania) Interakcja
Pamięć wirtualna. Przygotował: Ryszard Kijaka. Wykład 4
 Pamięć wirtualna Przygotował: Ryszard Kijaka Wykład 4 Wstęp główny podział to: PM- do pamięci masowych należą wszelkiego rodzaju pamięci na nośnikach magnetycznych, takie jak dyski twarde i elastyczne,
Pamięć wirtualna Przygotował: Ryszard Kijaka Wykład 4 Wstęp główny podział to: PM- do pamięci masowych należą wszelkiego rodzaju pamięci na nośnikach magnetycznych, takie jak dyski twarde i elastyczne,
SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE
 SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE WINDOWS 1 SO i SK/WIN 006 Wydajność systemu 2 SO i SK/WIN Najprostszym sposobem na poprawienie wydajności systemu, jeżeli dysponujemy zbyt małą ilością pamięci RAM
SYSTEMY OPERACYJNE I SIECI KOMPUTEROWE WINDOWS 1 SO i SK/WIN 006 Wydajność systemu 2 SO i SK/WIN Najprostszym sposobem na poprawienie wydajności systemu, jeżeli dysponujemy zbyt małą ilością pamięci RAM
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 13: Elementy systemów operacyjnych czasu rzeczywistego (2/2) SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 13: Elementy systemów operacyjnych czasu rzeczywistego (2/2) SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
WYKŁAD 3 Jądro systemu i procesy. Marcin Tomana Wyższa Szkoła Informatyki i Zarządzania
 SYSTEMY OPERACYJNE WYKŁAD 3 Jądro systemu i procesy Marcin Tomana Wyższa Szkoła Informatyki i Zarządzania Program wykładu 2 Jądro systemu Możliwości procesorów Działanie procesów i wątków Zarządzanie procesami
SYSTEMY OPERACYJNE WYKŁAD 3 Jądro systemu i procesy Marcin Tomana Wyższa Szkoła Informatyki i Zarządzania Program wykładu 2 Jądro systemu Możliwości procesorów Działanie procesów i wątków Zarządzanie procesami
Systemy operacyjne oparte na mikrojądrze na przykładzie Minix3. Maciej Łaszcz, Wojciech Łowiec, Patryk Spanily 2 XII 2008
 Systemy operacyjne oparte na mikrojądrze na przykładzie Minix3. Maciej Łaszcz, Wojciech Łowiec, Patryk Spanily 2 XII 2008 Systemy oparte na mikrojądrze Jądro systemu jest bardzo małe Architektura mocno
Systemy operacyjne oparte na mikrojądrze na przykładzie Minix3. Maciej Łaszcz, Wojciech Łowiec, Patryk Spanily 2 XII 2008 Systemy oparte na mikrojądrze Jądro systemu jest bardzo małe Architektura mocno
System operacyjny System operacyjny
 System operacyjny System operacyjny (ang. operating system) jest programem (grupą programów), który pośredniczy między użytkownikiem komputera a sprzętem komputerowym. Jest on niezbędny do prawidłowej
System operacyjny System operacyjny (ang. operating system) jest programem (grupą programów), który pośredniczy między użytkownikiem komputera a sprzętem komputerowym. Jest on niezbędny do prawidłowej
SOE Systemy Operacyjne Wykład 8 Pamięć wirtualna dr inż. Andrzej Wielgus
 SOE Systemy Operacyjne Wykład 8 Pamięć wirtualna dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Pamięć wirtualna Stronicowanie na żądanie większość współczesnych systemów
SOE Systemy Operacyjne Wykład 8 Pamięć wirtualna dr inż. Andrzej Wielgus Instytut Mikroelektroniki i Optoelektroniki WEiTI PW Pamięć wirtualna Stronicowanie na żądanie większość współczesnych systemów