Podstawy Techniki Cyfrowej Teoria automatów
|
|
|
- Marcin Gajewski
- 6 lat temu
- Przeglądów:
Transkrypt
1 Podstawy Techniki Cyfrowej Teoria automatów
2 Uwaga Niniejsza prezentacja stanowi uzupełnienie materiału wykładowego i zawiera jedynie wybrane wiadomości teoretyczne dotyczące metod syntezy układów asynchronicznych.
3 Układy asynchroniczne są podgrupą układów sekwencyjnych, czyli takich, których stan wejść nie określa w sposób jednoznaczny stanu wyjść. Słowo wyjściowe zależy także od poprzednich stanów wejściowych oraz ich kolejności występowania (sekwencji słów wejściowych stąd ich nazwa). Często układu sekwencyjne nazywa się układami kombinacyjnymi z pamięcią. W odróżnieniu od automatów synchronicznych, w układach asynchronicznych żadne z wejść nie jest wyróżnione i zmiana dowolnego sygnału wejściowego, może wywołać prawie natychmiastową zmianę stanu automatu. Działanie automatu, podobnie jak w przypadku automatów synchronicznych, opisuje się przy pomocy ich programu (tablic przejścia wyjścia). To ważne: Stan wyjściowy automatu zależy od jego stanu wewnętrznego w przypadku automatu Moore a lub od stanu wewnętrznego i stanu wejść w przypadku automatu Mealy ego.
4 W przykładowej tablicy przejść-wyjść zaznacza się w kółkach tzw. stany stabilne przy danym stanie wejść. Należy to rozumieć w taki sposób, że jest to stan w którym automat pozostaje aż do zmiany stanu sygnałów wejściowych.` Stany nie oznaczone kółkami to tzw. stany niestabilne, w których to automat znajduje się przez krótką chwilę pomiędzy stanami stabilnymi. Stany niestabilne służą do opisu przejścia automatu do określonego stanu. Stan 1 jest stabilny dla kombinacji wejść 00. Jeśli automat znajdzie się w tym stanie i stan wejść zmieni się na 01, to automat przez krótką chwilę znajdzie się w stanie 4 w wierszu odpowiadającym stanowi 1, by potem przejść do stanu 4, który jest stanem stabilnym dla kombinacji wejść 01. Zmiana wejść w stanie 1 z 00 na 10 spowoduje przejście, poprzez stan niestabilny, do stanu stabilnego 2. Zmiana wejść na 11 jest zabroniona, ponieważ równoczesna zmiana stanu obu wejść nie jest możliwa.
5 Realizacja automatu asynchronicznego opiera się na budowie układu kombinacyjnego wraz z pętlami sprzężenia zwrotnego. Możliwe jest zbudowanie go z zastosowanie przerzutników, jednak metoda ta jest bardziej złożona. Podobnie jak w przypadku automatów synchronicznych, proces syntezy automatu asynchronicznego podzielić można na kilka etapów. Są to: Synteza abstrakcyjna (tworzenie grafu oraz tablicy przejść-wyjść na podstawie jego opisu) Minimalizacja (redukcja) liczby stanów wewnętrznych Kodowanie stanów, liter wejściowych i wyjściowych Realizacja układowa automatu synteza kombinacyjna
6 Krok 1. Synteza abstrakcyjna tworzenie tablicy przejść-wyjść Jest bardzo ważnym etapem syntezy automatu i polega na tworzeniu tzw. pierwotnej tablicy przejść-wyjść. Buduje się ją na podstawie samego opisu działania automatu np. wykresu czasowego, grafu skierowanego lub opisu słownego. Wskazówka: W przypadku opisu układu za pomocą wykresu czasowego należy pamiętać, że zazwyczaj wykresy takie nie uwzględniają wszystkich możliwych sekwencji stanów automatu. Należy wówczas przeanalizować i uzupełnić te klatki tablicy, nie zostały wypełnione w pierwszym etapie. Tworzenie tablicy przejść polega na przypisaniu różnych symboli różnym stanom wewnętrznym automatu, następnie określenie ich następstwa i odpowiadających im stanów wyjść. W przypadku automatów asynchronicznych zmiany stanów wyznaczone są przez wszelkie momenty zmian sygnałów wejściowych. Po oznaczeniu stanów i określeniu ich następstwa, tworzymy tzw. pierwotną tablicę przejść-wyjść. Charakteryzuje się ona tym, że każdy stan jest stabilny tylko przy jednym stanie wejść.
7 Przykład 1. Z bramek NAND zbudować generator pojedynczego impulsu o długości, gdzie T jest okresem zegara G o wypełnieniu ½. Odstępy między kolejnymi zmianami stanu impulsów wejściowych są wielokrotnie dłuże od okresu zegara G Jak wynika z wykresu, generacja sygnału wyjściowego y jest wyzwalana tylnym zboczem sygnału wejściowego x, natomiast zakończenie generacji musi być wywołane odpowiednim zboczem zegara G, tak aby spełnione były warunki określone w zadaniu W zależności od sygnału G w momencie rozpoczęcia generacji impulsu, sygnał y jest wyłączany pierwszym lub drugim narastającym zboczem sygnału zegarowego (w jeśli rozpoczął się przy wysokim lub niskim stanie sygnału G).
8 Proces oznaczania (nazywania) stanów W procesie nazywania stanów na wykresie często niełatwo jest odpowiedzieć na pytanie, czy aktualnie analizowany stan jest stanem nowym. W tym celu opracowano kilka reguł:
9 Proces oznaczania (nazywania) stanów 1. Stany różniące się kombinacją stanów wejść i wyjść są różnymi stanami (np. pierwsze cztery stany automatu) 2. Stany dla których wejścia i wyjścia są identyczne nie zawsze są stanami równoważnymi często stany te pełnią różną funkcją w działaniu automatu, np. pamiętają pewne sekwencje stanów lub przejście do analizowanego stanu jest realizowane w innych warunkach (wyjątek). Przykład: stan 5 i 7. Stan 5 pojawia się w sytuacji, gdy sygnał wyjściowy rozpoczął się w stanie niskim sygnału G, a zatem po stanie 5 należy podtrzymać generację jeszcze przez pełny takt poprzez przejście do stanów 6 i 7 Stan 7 jest identyczny pod względem kombinacji sygnałów G, x, y, ale układ wie, że powinien zakończyć generację sygnału przy pierwszym narastającym zboczu. 3. W razie trudnych do rozstrzygnięcia wątpliwości co do równoważności dwóch stanów o identycznych wejściach i wyjściach należy im przypisać różne symbole. Przy prawidłowo stworzonej tablicy pierwotnej równoważność zostanie wykryta w procesie minimalizacji.
10 Tworzenie tablicy przejść i wyjść Wypełnianie tablicy najwygodniej jest zrealizować w kilku etapach: 1. Wpisujemy stany stabilne automatu 2. Wpisujemy kreski w tych klatkach, dla których sygnał wejściowy różni się od sygnału odpowiadającemu stanowi stabilnemu w danym wierszu na więcej niż jednej pozycji. 3. Wpisujemy wszystkie przejścia występujące na wykresie czasowym 4. Analizujemy i uzupełniamy te klatki tablicy, które nie zostały wypełnione w poprzednim etapie.
11 Tworzenie tablicy przejść i wyjść Wypełnianie tablicy najwygodniej jest zrealizować w kilku etapach: 1. Wpisujemy stany stabilne automatu 2. Wpisujemy kreski w tych klatkach, dla których sygnał wejściowy różni się od sygnału odpowiadającemu stanowi stabilnemu w danym wierszu na więcej niż jednej pozycji. 3. Wpisujemy wszystkie przejścia występujące na wykresie czasowym 4. Analizujemy i uzupełniamy te klatki tablicy, które nie zostały wypełnione w poprzednim etapie.
12 Tworzenie tablicy przejść i wyjść
13 Tworzenie tablicy przejść i wyjść Wypełnianie tablicy najwygodniej jest zrealizować w kilku etapach: Wpisujemy kreski w tych klatkach, dla których sygnał wejściowy różni się od sygnału odpowiadającemu stanowi stabilnemu w danym wierszu na więcej niż jednej pozycji.

14 Tworzenie tablicy przejść i wyjść Wpisujemy wszystkie przejścia występujące na wykresie czasowym Analizujemy i uzupełniamy te klatki tablicy, które nie zostały wypełnione w poprzednim etapie.
15 Przykład 2. Z elementów NAND zbudować zamek szyfrowy otwierany przy pomocy dwóch przycisków A i B, naciskanych w kolejności ABB (przycisk A zostaje zwolniony przed naciśnięciem B), przy czym sposób w jaki przyciski były naciskane poprzednio nie jest istotny. Zakładamy, że użytkownik może nacisnąć oba przyciski jednocześnie. W tego typu zadaniach wygodnie jest użyć, jako etapu przejściowego pomiędzy opisem słownym, a tablicą przejść grafu przejść automatu. Przejścia w grafie warto oznaczyć zgodnie z przyciskami A oraz B. Przy czym wartość 1 oznacza klawisz wciśnięty. Przy każdym stanie zaznaczono, małą pętlą wracającą do tego samego stanu, warunki wejściowe, przy których dany stan jest stabilny nie zmienia się stan automatu dopóki, dopóty nie zmieni się stan sygnałów wejściowych (pętla while) Prawidłową sekwencją otwierającą zamek jest sekwencja A, B, B, a właściwie A, N, B, N, B, gdzie N oznacza stan, w którym żaden przycisk nie jest wciśnięty (AB = 00). Odpowiada to sekwencji 00 -> 10 -> 00 -> 01 -> 00 -> 01 wówczas taka sekwencja powoduje przejście automatu, gdzie stan wyjścia zmieni się na 1
16 Przykład 2. Prawidłową sekwencją otwierającą zamek jest sekwencja A, B, B, a właściwie A, N, B, N, B, gdzie N oznacza stan, w którym żaden przycisk nie jest wciśnięty (AB = 00). Odpowiada to sekwencji 00 -> 10 -> 00 -> 01 -> 00 -> 01 wówczas taka sekwencja powoduje przejście automatu, gdzie stan wyjścia zmieni się na 1
17 Uzupełniamy stany stabilne Uzupełniamy stany zabronione Uzupełniamy stany błędnego wpisania hasła
18 Krok 2. Minimalizacja tablicy przejść-wyjść Minimalizacja rozpoczyna się od poszukiwania i łączenia stanów pseudorównoważnych, spełniających trzy warunki: 1. Stany stabilne stanów pseudorównoważnych muszą występować w tej samej kolumnie 2. Wyjścia odpowiadające obu stanom są niesprzeczne (są jednakowe lub jedno z nich jest nieokreślone) 3. Dla dowolnej zmiany stanu wejść układ przechodzi z obu rozważanych stanów do stanów jednakowych lub pseudorównoważnych
19 Stanów równoważnych poszukujemy tylko pośród tych, których stany stabilne występują w jednej kolumnie, czyli badamy pseudorównoważność par: 3-8, i 2-4 dla A\Gx = 00 Porównujemy dla A\Gx = 01 Porównujemy 1-5 i 1-6 dla A\Gx = 11 Porównujemy 2-4 Stany mają sprzeczne wyjścia więc nie są pseudorównoważne
20 Do analizy pozostają pary i [2] 7-6 [4] 7 OK x/ok OK OK Sprawdzamy czy 1-6 jest równoważne, ale jest sprzeczne więc 2-4 nie jest równoważne [1] 2-8 [5] 2 - OK OK OK OK równoważne bezwarunkowo 3-8 [3] 5-7 [8] 1-7 OK x/ok OK OK Sprawdzamy czy 5-1 jest równoważne, jest więc 3-8 jest równoważne
21 Tablica pierwotna i tablica po usunięciu stanów pseudorównoważnych
22 Łączenie stanów zgodnych Stanami zgodnymi są wyłącznie takie, których stany następne są jednakowe lub co najmniej jeden z nich jest nieokreślony W przypadku automatu Moore a grupujemy wyłącznie stany o niesprzecznych wyjściach. Tworzenie automatu Moore a jest prostsze między innymi ze względu na sposób określania stanów wyjścia ukladu. W przypadku tego automatu dla każdego stanu w nowo utworzonej tablicy minimalnej przypisujemy określony stan wyjściowy, który wynika z wyjść łączonych stanów. Ważne: W przypadku łączenia stanów, z których jeden ma wyjście nieokreślone, a drugiokreślone, o stanie wyjścia stanu wynikowego decyduje wyjście określone.
23 Przykład Analiza stanu 1 i 2 Spełniają warunek zgodności 3 -> - = 3 [1] -> 1 = [1] 2 -> [2] = [2] - -> 7 = 7 Analiza stanu 1 i 3 Ale mają sprzeczne stany łączymy je linią przerywaną Są zgodne i mają niesprzeczne wyjścia łączymy je linią ciągłą Analiza stanu 1 i 4 Nie są zgodne niezgodność występuje dla X=01 i dla X=11 nie łączymy ich linią
24 Automat Moore a przewiduje łączenie w grupy wyłączenie stanów połączonych liniami ciągłymi. W analizowanym przypadku nie można podzielić ich na mniej niż 5 grup, ale możliwe są dwa takie podziały: {1} {2,3} {4,7} {6} {9} {1,3} {2} {4,7} {6} {9}
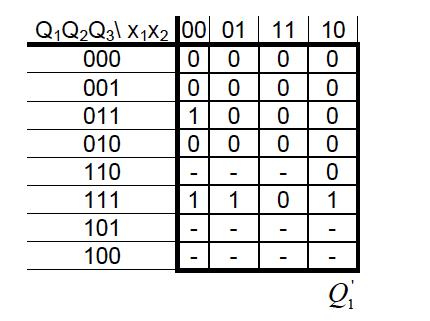
25 Krok 3. Kodowanie tablicy przejść-wyjść i eliminacja zjawiska wyścigów Kodowanie tablicy przejść polega na jednoznacznym przyporządkowaniu stanom wewnętrznym S automatu kodów binarnych Q 1, Q 2,..., Q k. Do zakodowania tablicy przejść automatu o K stanach wewnętrznych potrzeba k sygnałów 2-stanowych (binarnych). Uwaga: Kodowanie jest bardzo ważnym i krytycznym etapem syntezy, gdyż wybór niewłaściwego kodu może prowadzić do występowania zjawiska tzw. wyścigów, który wynika z różnic opóźnień w elementach pamięciowych. Na ogół zjawisko to występuje przy przejściach między stanami, których kody różnią się więcej jednym bitem. Przykładowo ze stanu o kodzie 00 do stanu 11 automat będzie przechodził jedną z dwóch możliwych dróg: 00 à 01 à 11 lub 00 à 10 à 11 Ważne: Stan pośredni może być stanem stabilnym lub stanem niestabilnym prowadzącym do niewłaściwego stanu stabilnego, przez co układ zadziała nieprawidłowo. Takie zjawisko nazywamy wyścigiem krytycznym Jeśli w kolumnie X stan docelowy jest jedynym stanem stabilnym, mamy do czynienia z tzw. wyścigiem niekrytycznym, Ponieważ teoretycznie układ po przejściu stanów nieustalonych powinien trafić do pożądanego stanu stabilnego. W rzeczywistości istnieje ryzyko, że jeśli w kolumnie istnieją stany niestabilne to w procesie realizacji w ich miejscach mogą pojawić się stany stabilne.
26 W tablic przejść automatu występują tylko dwa przejścia, dla których kod stanu zmienia się na dwóch pozycjach: Przejście ze stanu 3 (kod 11) do stanu 1 (kod 00) kolumna 01 Przejście ze stanu 4 (kod 10) do stanu 2 (kod 01) kolumna 00
27 Przejście ze stanu 4 (kod 10) do stanu 2 (kod 01) kolumna 00 Przejście 4 à 2 dla X = 00 niesie ryzyko wyścigu krytycznego, gdyż w kolumnie tej występują dwa stany stabilne: 2 i 3. Przejście ze stanu 4 à 2 może przebiegać jedną z dwóch dróg: 10 à 00 à 01 lub 10 à 11 à 01 W tym stanie automat się zatrzyma, bo jest to stan stabilny
28 Wymuszamy przejście drogą 10 à 00 à 01 poprzez wpisanie 1 w stanie 4 (10) dla A\Gx = 00
29 Przejście ze stanu 3 (kod 11) do stanu 1 (kod 00) kolumna 01 Przejście ze stanu 3 à 1 może przebiegać jedną z dwóch dróg: 11 à 01 à 00 lub 11 à 10 à 00 Automat podczas wyboru drogi przez 11à10à00 może nie dotrzeć do stabilnej jedynki ponieważ w stanie 4 dla A\Gx = 01 występuje stan nieokreślony
 dla A\Gx = 01 oraz wpisanie 1 w stanie 4 (10) dla")
30 Wymuszamy przejście drogą 11 à 10 à 00 poprzez: wpisanie 4 w stanie 3 (11) dla A\Gx = 01 oraz wpisanie 1 w stanie 4 (10) dla A\Gx = 01
31 W analizowanym przykładzie możliwe było usunięcie wyścigu krytycznego przy przejściu ze stany 4 do stanu 2 poprzez wprowadzenie przejścia cyklicznego przez stan 1. Często jednak wprowadzenie przejść cyklicznych nie jest możliwe w obrębie istniejących stanów automatu i wymaga wprowadzenia stanu lub stanów dodatkowych. Dołączenie dodatkowych stanów ułatwia przeprowadzenie procesu przekształcania grafu przejść, jednak na ogół cały układ jest bardziej skomplikowany. Przekształcanie grafu przejść Aby uniknąć wyścigów, należy przede wszystkim wybrać odpowiednie kody stanów automatu, takie by w automacie nie występowały przejścia o jednoczesnej zmianie dwóch lub więcej sygnałów Q i. Najbardziej efektywną metodą jest metoda przekształcania grafu przejść. Opiera się ona na zastosowaniu modelu geometrycznego przestrzeni stanów automatu. Model ten ma postać zbioru punktów odpowiadających poszczególnym stanom wew. położonych w wierzchołkach k-wymiarowego hipersześcianu, którego sąsiednimi wierzchołkom przyporządkowano kolejne liczby w kodzie Gray a. W ten sposób punkty połączone krawędziami hipersześcianu przypisane mają kody różniące się zawsze tylko jednym bitem.
32 Kodowanie polega na przypisaniu stanów automatu wierzchołkom hipersześcianu w taki sposób, aby wszystkie strzałki grafu przejść leżały na jego krawędziach. W większości przypadków nie daje się uniknąć przejść po przekątnych hipersześcianów, ale metoda ta pozwala zmniejszyć ich liczbę. Po każdej próbie zakodowania należy przeanalizować wszystkie przejścia po przekątnych, badając czy tworzą wyścigi krytyczne czy niekrytyczne. Jeśli istnieją wyścigi krytyczne, należy spróbować innego kodu, aż do wyczerpania możliwości. Jeśli nie istnieje możliwość uniknięcia wyścigów krytycznych, model geometryczny jest pomocny w projektowaniu przejść cyklicznych.
33 Wyścigi krytyczne zaznaczone są grubszą linią. Jak widać kody odpowiadające grafom b i c dają w wyniku kodowania odpowiednio: trzy oraz dwa wyścigi krytyczne, natomiast kodowanie zgodnie z grafem d pozbawione jest wyścigów krytycznych istnieje w nim tylko jedne wyścigniekrytyczny.
 można stworzyć wprost na podstawie zakodowanych tablic przejść, zgodnie z regułami dotyczącymi minimalizacji zespołów funkcji przełączających, ale dbając o to, by wszystkie funkcje były")
34 Krok4. Realizacja tablic przejść W przypadku realizacji automatu asynchronicznego w postaci układu kombinacyjnego objętymi pętlami sprzężenia zwrotnego, jego funkcje: Q = f((q1, Q2,..., Qk, X) można stworzyć wprost na podstawie zakodowanych tablic przejść, zgodnie z regułami dotyczącymi minimalizacji zespołów funkcji przełączających, ale dbając o to, by wszystkie funkcje były wolne od hazardów. Zjawisko hazardów jest bardzo groźne w układach asynchronicznych, gdyż każde pojawienie się fałszywego stanu Q może zostać podtrzymane przez pętle sprzężenia zwrotnego i spowodować błędne działanie układu.


35
36
zmiana stanu pamięci następuje bezpośrednio (w dowolnej chwili czasu) pod wpływem zmiany stanu wejść,
 pod wpływem zmiany stanu wejść,") Sekwencyjne układy cyfrowe Układ sekwencyjny to układ cyfrowy, w którym zależność między wartościami sygnałów wejściowych (tzw. stan wejść) i wyjściowych (tzw. stan wyjść) nie jest jednoznaczna. Stan wyjść
Sekwencyjne układy cyfrowe Układ sekwencyjny to układ cyfrowy, w którym zależność między wartościami sygnałów wejściowych (tzw. stan wejść) i wyjściowych (tzw. stan wyjść) nie jest jednoznaczna. Stan wyjść
1. SYNTEZA UKŁADÓW SEKWENCYJNYCH
 DODATEK: SEKWENCJNE UKŁAD ASNCHRONICZNE CD.. SNTEZA UKŁADÓW SEKWENCJNCH Synteza to proces prowadzący od założeń definiujących sposób działania układu do jego projektu. odczas syntezy należy kolejno ustalić:
DODATEK: SEKWENCJNE UKŁAD ASNCHRONICZNE CD.. SNTEZA UKŁADÓW SEKWENCJNCH Synteza to proces prowadzący od założeń definiujących sposób działania układu do jego projektu. odczas syntezy należy kolejno ustalić:
Sławomir Kulesza. Projektowanie automatów asynchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Podstawy techniki cyfrowej. Układy asynchroniczne Opracował: R.Walkowiak Styczeń 2014
 Podstawy techniki cyfrowej Układy asynchroniczne Opracował: R.Walkowiak Styczeń 2014 Charakterystyka układów asynchronicznych Brak wejścia: zegarowego, synchronizującego. Natychmiastowa (niesynchronizowana)
Podstawy techniki cyfrowej Układy asynchroniczne Opracował: R.Walkowiak Styczeń 2014 Charakterystyka układów asynchronicznych Brak wejścia: zegarowego, synchronizującego. Natychmiastowa (niesynchronizowana)
SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1. Układy kombinacyjne i sekwencyjne - przypomnienie
 SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1 Układy kombinacyjne i sekwencyjne - przypomnienie SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 2 Stan
SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 1 Układy kombinacyjne i sekwencyjne - przypomnienie SWB - Projektowanie synchronicznych układów sekwencyjnych - wykład 5 asz 2 Stan
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów. Rafał Walkowiak Wersja /2015
 Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
Podstawowe moduły układów cyfrowych układy sekwencyjne cz.2 Projektowanie automatów synchronicznych Rafał Walkowiak Wersja.2 24/25 UK Funkcje wzbudzeń UK Funkcje wzbudzeń Pamieć Pamieć UK Funkcje wyjściowe
Sławomir Kulesza. Projektowanie automatów synchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
Sławomir Kulesza Technika cyfrowa Projektowanie automatów synchronicznych Wykład dla studentów III roku Informatyki Wersja 2.0, 20/12/2012 Automaty skończone Automat Mealy'ego Funkcja wyjść: Yt = f(st,
Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
KATEDRA INFORMATYKI TECHNICZNEJ. Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych. ćwiczenie 212
 KATEDRA INFORMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki ów Cyfrowych ćwiczenie Temat: Automat asynchroniczny. Cel ćwiczenia Celem ćwiczenia jest nabycie praktycznej umiejętności projektowania
KATEDRA INFORMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki ów Cyfrowych ćwiczenie Temat: Automat asynchroniczny. Cel ćwiczenia Celem ćwiczenia jest nabycie praktycznej umiejętności projektowania
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Układy asynchroniczne
 Układy asynchroniczne Model układu asynchronicznego y x n UK y m układ kombinacyjny q k BP q k blok pamięci realizuje opóźnienia adeusz P x x t s tan stabilny s: δ(s,x) = s automacie asynchronicznym wszystkie
Układy asynchroniczne Model układu asynchronicznego y x n UK y m układ kombinacyjny q k BP q k blok pamięci realizuje opóźnienia adeusz P x x t s tan stabilny s: δ(s,x) = s automacie asynchronicznym wszystkie
Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych.
Wstęp do Techniki Cyfrowej... Teoria automatów i układy sekwencyjne Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych.
Przerzutnik ma pewną liczbę wejść i z reguły dwa wyjścia.
 Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
1. Synteza automatów Moore a i Mealy realizujących zadane przekształcenie 2. Transformacja automatu Moore a w automat Mealy i odwrotnie
 Opracował: dr hab. inż. Jan Magott KATEDRA INFORMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 207 Temat: Automaty Moore'a i Mealy 1. Cel ćwiczenia Celem ćwiczenia jest
Opracował: dr hab. inż. Jan Magott KATEDRA INFORMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 207 Temat: Automaty Moore'a i Mealy 1. Cel ćwiczenia Celem ćwiczenia jest
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014
 Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Spis treści. Przedmowa Wykaz oznaczeń Wstęp Układy kombinacyjne... 18
 Spis treści Przedmowa... 11 Wykaz oznaczeń... 13 1. Wstęp... 15 1.1. Układycyfrowe... 15 1.2. Krótki esej o projektowaniu.... 15 2. Układy kombinacyjne... 18 2.1. Podstawyprojektowaniaukładówkombinacyjnych...
Spis treści Przedmowa... 11 Wykaz oznaczeń... 13 1. Wstęp... 15 1.1. Układycyfrowe... 15 1.2. Krótki esej o projektowaniu.... 15 2. Układy kombinacyjne... 18 2.1. Podstawyprojektowaniaukładówkombinacyjnych...
Synteza strukturalna automatów Moore'a i Mealy
 Synteza strukturalna automatów Moore'a i Mealy Formalna definicja automatu: A = < Z, Q, Y, Φ, Ψ, q 0 > Z alfabet wejściowy Q zbiór stanów wewnętrznych Y alfabet wyjściowy Φ funkcja przejść q(t+1) = Φ (q(t),
Synteza strukturalna automatów Moore'a i Mealy Formalna definicja automatu: A = < Z, Q, Y, Φ, Ψ, q 0 > Z alfabet wejściowy Q zbiór stanów wewnętrznych Y alfabet wyjściowy Φ funkcja przejść q(t+1) = Φ (q(t),
TEMAT: PROJEKTOWANIE I BADANIE PRZERZUTNIKÓW BISTABILNYCH
 Praca laboratoryjna 2 TEMAT: PROJEKTOWANIE I BADANIE PRZERZUTNIKÓW BISTABILNYCH Cel pracy poznanie zasad funkcjonowania przerzutników różnych typów w oparciu o różne rozwiązania układowe. Poznanie sposobów
Praca laboratoryjna 2 TEMAT: PROJEKTOWANIE I BADANIE PRZERZUTNIKÓW BISTABILNYCH Cel pracy poznanie zasad funkcjonowania przerzutników różnych typów w oparciu o różne rozwiązania układowe. Poznanie sposobów
Tranzystor JFET i MOSFET zas. działania
 Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Automat skończony FSM Finite State Machine
 Automat skończony FSM Finite State Machine Projektowanie detektora sekwencji Laboratorium z Elektroniki Współczesnej A. Skoczeń, KOiDC, WFiIS, AGH, 2019 AGH, WFiIS, Elektronika Współczesna 1 Deterministyczny
Automat skończony FSM Finite State Machine Projektowanie detektora sekwencji Laboratorium z Elektroniki Współczesnej A. Skoczeń, KOiDC, WFiIS, AGH, 2019 AGH, WFiIS, Elektronika Współczesna 1 Deterministyczny
dwójkę liczącą Licznikiem Podział liczników:
 1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
Podstawy Automatyki. Człowiek- najlepsza inwestycja. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Podstawy Automatyki Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Politechnika Warszawska Instytut Automatyki i Robotyki Dr inż.
Układy asynchroniczne
 Układy asynchroniczne Model układu sekwencyjnego Model układu asynchronicznego (synchronicznego) y 1 x n UK y m układ kombinacyjny Z clock t 1 q 1 k B x s tan stabilny s: δ(s,x) = s x blok pamięci jest
Układy asynchroniczne Model układu sekwencyjnego Model układu asynchronicznego (synchronicznego) y 1 x n UK y m układ kombinacyjny Z clock t 1 q 1 k B x s tan stabilny s: δ(s,x) = s x blok pamięci jest
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2015 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
1.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych
 .Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
.Wprowadzenie do projektowania układów sekwencyjnych synchronicznych.. Przerzutniki synchroniczne Istota działania przerzutników synchronicznych polega na tym, że zmiana stanu wewnętrznego powinna nastąpić
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Definicja układu kombinacyjnego była stosunkowo prosta -tabela prawdy. Opis układu sekwencyjnego jest zadaniem bardziej złożonym.
 3.4. GRF UTOMTU, TBELE PRZEJŚĆ / WYJŚĆ Definicja układu kombinacyjnego była stosunkowo prosta -tabela prawdy. Opis układu sekwencyjnego jest zadaniem bardziej złożonym. Proste przypadki: Opis słowny, np.:
3.4. GRF UTOMTU, TBELE PRZEJŚĆ / WYJŚĆ Definicja układu kombinacyjnego była stosunkowo prosta -tabela prawdy. Opis układu sekwencyjnego jest zadaniem bardziej złożonym. Proste przypadki: Opis słowny, np.:
Wstęp do Techniki Cyfrowej... Teoria automatów
 Wstęp do Techniki Cyfrowej... Teoria automatów Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych. Zwiększenie stopnia
Wstęp do Techniki Cyfrowej... Teoria automatów Alfabety i litery Układ logiczny opisywany jest przez wektory, których wartości reprezentowane są przez ciągi kombinacji zerojedynkowych. Zwiększenie stopnia
Statyczne badanie przerzutników - ćwiczenie 3
 Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Errata do książki Multisim. Technika cyfrowa w przykładach.
 . 3. 24 r. rrata do książki Multisim. Technika cyfrowa w przykładach.. str.5, źle jest zapisana postać funkcji wyjściowej równoważność (xclusive NOR, XNOR, NOR, XNOR), y 7 = a b + a b = a Ä b = a Å b 2.
. 3. 24 r. rrata do książki Multisim. Technika cyfrowa w przykładach.. str.5, źle jest zapisana postać funkcji wyjściowej równoważność (xclusive NOR, XNOR, NOR, XNOR), y 7 = a b + a b = a Ä b = a Å b 2.
Synteza strukturalna automatu Moore'a i Mealy
 Synteza strukturalna automatu Moore'a i Mealy (wersja robocza - w razie zauważenia błędów proszę o uwagi na mail'a) Załóżmy, że mamy następujący graf automatu z 2 y 0 q 0 z 1 z 1 z 0 z 0 y 1 z 2 q 2 z
Synteza strukturalna automatu Moore'a i Mealy (wersja robocza - w razie zauważenia błędów proszę o uwagi na mail'a) Załóżmy, że mamy następujący graf automatu z 2 y 0 q 0 z 1 z 1 z 0 z 0 y 1 z 2 q 2 z
Metoda Karnaugh. B A BC A
 Metoda Karnaugh. Powszechnie uważa się, iż układ o mniejszej liczbie elementów jest tańszy i bardziej niezawodny, a spośród dwóch układów o takiej samej liczbie elementów logicznych lepszy jest ten, który
Metoda Karnaugh. Powszechnie uważa się, iż układ o mniejszej liczbie elementów jest tańszy i bardziej niezawodny, a spośród dwóch układów o takiej samej liczbie elementów logicznych lepszy jest ten, który
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające
 PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
Teoria układów logicznych
 Automat Moore a Automatem Moore a nazywamy uporządkowaną piątkę ( Q, X,,, ) gdzie Q jest skończonym zbiorem niepustym, nazwanym zbiorem stanów automatu, X jest skończonym zbiorem niepustym, nazwanym alfabetem
Automat Moore a Automatem Moore a nazywamy uporządkowaną piątkę ( Q, X,,, ) gdzie Q jest skończonym zbiorem niepustym, nazwanym zbiorem stanów automatu, X jest skończonym zbiorem niepustym, nazwanym alfabetem
Automat Moore a. Teoria układów logicznych
 Automat Moore a Automatem Moore a nazywamy uporządkowaną piątkę (Q,X,Y,δ, λ )gdzie Qjestskończonym zbiorem niepustym, nazwanym zbiorem stanów automatu, Xjestskończonym zbiorem niepustym, nazwanym alfabetem
Automat Moore a Automatem Moore a nazywamy uporządkowaną piątkę (Q,X,Y,δ, λ )gdzie Qjestskończonym zbiorem niepustym, nazwanym zbiorem stanów automatu, Xjestskończonym zbiorem niepustym, nazwanym alfabetem
Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające
 Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Sekwencyjny układ przełączający układ przełączający
Technika Cyfrowa 1 wykład 12: sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Sekwencyjny układ przełączający układ przełączający
Inwerter logiczny. Ilustracja 1: Układ do symulacji inwertera (Inverter.sch)
") DSCH2 to program do edycji i symulacji układów logicznych. DSCH2 jest wykorzystywany do sprawdzenia architektury układu logicznego przed rozpoczęciem projektowania fizycznego. DSCH2 zapewnia ergonomiczne
DSCH2 to program do edycji i symulacji układów logicznych. DSCH2 jest wykorzystywany do sprawdzenia architektury układu logicznego przed rozpoczęciem projektowania fizycznego. DSCH2 zapewnia ergonomiczne
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Podstawy Automatyki. Wykład 13 - Wprowadzenie do układów sekwencyjnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
LICZNIKI PODZIAŁ I PARAMETRY
 LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
Podstawowe elementy układów cyfrowych układy sekwencyjne. Rafał Walkowiak
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Laboratorium przedmiotu Technika Cyfrowa
 Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Zapoznanie się z podstawowymi strukturami liczników asynchronicznych szeregowych modulo N, zliczających w przód i w tył oraz zasadą ich działania.
 Badanie liczników asynchronicznych - Ćwiczenie 4 1. el ćwiczenia Zapoznanie się z podstawowymi strukturami liczników asynchronicznych szeregowych modulo N, zliczających w przód i w tył oraz zasadą ich
Badanie liczników asynchronicznych - Ćwiczenie 4 1. el ćwiczenia Zapoznanie się z podstawowymi strukturami liczników asynchronicznych szeregowych modulo N, zliczających w przód i w tył oraz zasadą ich
Podział układów cyfrowych. rkijanka
 Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Podział układów cyfrowych rkijanka W zależności od przyjętego kryterium możemy wyróżnić kilka sposobów podziału układów cyfrowych. Poniżej podam dwa z nich związane ze sposobem funkcjonowania układów cyfrowych
Automatyzacja i robotyzacja procesów produkcyjnych
 Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Temat 3. Synteza układów sekwencyjnych z bramek logicznych
 Temat 3. Synteza układów sekwencyjnych z bramek logicznych Spis treści do tematu 3 3.1. Wprowadzenie 3.2. Projektowanie asynchronicznych układów sekwencyjnych metodą tablic przejść/wyjść (Huffmana). 3.3.
Temat 3. Synteza układów sekwencyjnych z bramek logicznych Spis treści do tematu 3 3.1. Wprowadzenie 3.2. Projektowanie asynchronicznych układów sekwencyjnych metodą tablic przejść/wyjść (Huffmana). 3.3.
Temat: Zastosowanie wyrażeń regularnych do syntezy i analizy automatów skończonych
 Opracował: dr inż. Zbigniew Buchalski KATEDRA INFORMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie Temat: Zastosowanie wyrażeń regularnych do syntezy i analizy automatów
Opracował: dr inż. Zbigniew Buchalski KATEDRA INFORMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie Temat: Zastosowanie wyrażeń regularnych do syntezy i analizy automatów
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Wykład nr 3 Techniki Mikroprocesorowe. dr inż. Artur Cichowski
 Wykład nr 3 Techniki Mikroprocesorowe dr inż. Artur Cichowski Automat skończony jest przetwornikiem ciągu symboli wejściowych na ciąg symboli wyjściowych. Zbiory symboli wejściowych x X i wyjściowych y
Wykład nr 3 Techniki Mikroprocesorowe dr inż. Artur Cichowski Automat skończony jest przetwornikiem ciągu symboli wejściowych na ciąg symboli wyjściowych. Zbiory symboli wejściowych x X i wyjściowych y
Układy kombinacyjne - przypomnienie
 SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy kombinacyjne - przypomnienie W układzie kombinacyjnym wyjście zależy tylko od wejść, SWB - Układy sekwencyjne - wiadomości podstawowe
SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy kombinacyjne - przypomnienie W układzie kombinacyjnym wyjście zależy tylko od wejść, SWB - Układy sekwencyjne - wiadomości podstawowe
W jakim celu to robimy? Tablica Karnaugh. Minimalizacja
 W jakim celu to robimy? W projektowaniu układów cyfrowych istotne jest aby budować je jak najmniejszym kosztem. To znaczy wykorzystanie dwóch bramek jest tańsze niż konieczność wykorzystania trzech dla
W jakim celu to robimy? W projektowaniu układów cyfrowych istotne jest aby budować je jak najmniejszym kosztem. To znaczy wykorzystanie dwóch bramek jest tańsze niż konieczność wykorzystania trzech dla
W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres
 PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
PROJEKTOWANIE LICZNIKÓW (skrót wiadomości) Autor: Rafał Walkowiak W przypadku spostrzeżenia błędu proszę o przesłanie informacji na adres rafal.walkowiak@cs.put.poznan.pl 1. Synchroniczne łączenie liczników
Na początek: do firmowych ustawień dodajemy sterowanie wyłącznikiem ściennym.
 Na początek: do firmowych ustawień dodajemy sterowanie wyłącznikiem ściennym. Mamy dwa rodzaje wyłączników ściennych: 1. Stabilny który zazwyczaj wszyscy używają do włączania oświetlenia. Nazywa się stabilny
Na początek: do firmowych ustawień dodajemy sterowanie wyłącznikiem ściennym. Mamy dwa rodzaje wyłączników ściennych: 1. Stabilny który zazwyczaj wszyscy używają do włączania oświetlenia. Nazywa się stabilny
xx + x = 1, to y = Jeśli x = 0, to y = 0 Przykładowy układ Funkcja przykładowego układu Metody poszukiwania testów Porównanie tabel prawdy
 Testowanie układów kombinacyjnych Przykładowy układ Wykrywanie błędów: 1. Sklejenie z 0 2. Sklejenie z 1 Testem danego uszkodzenia nazywa się takie wzbudzenie funkcji (wektor wejściowy), które daje błędną
Testowanie układów kombinacyjnych Przykładowy układ Wykrywanie błędów: 1. Sklejenie z 0 2. Sklejenie z 1 Testem danego uszkodzenia nazywa się takie wzbudzenie funkcji (wektor wejściowy), które daje błędną
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1
 Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Synteza układów kombinacyjnych
 Sławomir Kulesza Technika cyfrowa Synteza układów kombinacyjnych Wykład dla studentów III roku Informatyki Wersja 4.0, 23/10/2014 Bramki logiczne Bramki logiczne to podstawowe elementy logiczne realizujące
Sławomir Kulesza Technika cyfrowa Synteza układów kombinacyjnych Wykład dla studentów III roku Informatyki Wersja 4.0, 23/10/2014 Bramki logiczne Bramki logiczne to podstawowe elementy logiczne realizujące
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji. Temat pracy: Licznik binarny zliczający do 10.
 Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
Projekt z przedmiotu Systemy akwizycji i przesyłania informacji Temat pracy: Licznik binarny zliczający do 10. Andrzej Kuś Aleksander Matusz Prowadzący: dr inż. Adam Stadler Układy cyfrowe przetwarzają
WFiIS CEL ĆWICZENIA WSTĘP TEORETYCZNY
 WFiIS LABORATORIUM Z ELEKTRONIKI Imię i nazwisko: 1. 2. TEMAT: ROK GRUPA ZESPÓŁ NR ĆWICZENIA Data wykonania: Data oddania: Zwrot do poprawy: Data oddania: Data zliczenia: OCENA CEL ĆWICZENIA Ćwiczenie
WFiIS LABORATORIUM Z ELEKTRONIKI Imię i nazwisko: 1. 2. TEMAT: ROK GRUPA ZESPÓŁ NR ĆWICZENIA Data wykonania: Data oddania: Zwrot do poprawy: Data oddania: Data zliczenia: OCENA CEL ĆWICZENIA Ćwiczenie
b) bc a Rys. 1. Tablice Karnaugha dla funkcji o: a) n=2, b) n=3 i c) n=4 zmiennych.
 bc a Rys. 1. Tablice Karnaugha dla funkcji o: a) n=2, b) n=3 i c) n=4 zmiennych.") DODATEK: FUNKCJE LOGICZNE CD. 1 FUNKCJE LOGICZNE 1. Tablice Karnaugha Do reprezentacji funkcji boolowskiej n-zmiennych można wykorzystać tablicę prawdy o 2 n wierszach lub np. tablice Karnaugha. Tablica
DODATEK: FUNKCJE LOGICZNE CD. 1 FUNKCJE LOGICZNE 1. Tablice Karnaugha Do reprezentacji funkcji boolowskiej n-zmiennych można wykorzystać tablicę prawdy o 2 n wierszach lub np. tablice Karnaugha. Tablica
ćwiczenie 202 Temat: Układy kombinacyjne 1. Cel ćwiczenia
 Opracował: dr inż. Jarosław Mierzwa KTER INFORMTKI TEHNIZNEJ Ćwiczenia laboratoryjne z Logiki Układów yfrowych ćwiczenie 202 Temat: Układy kombinacyjne 1. el ćwiczenia Ćwiczenie ma na celu praktyczne zapoznanie
Opracował: dr inż. Jarosław Mierzwa KTER INFORMTKI TEHNIZNEJ Ćwiczenia laboratoryjne z Logiki Układów yfrowych ćwiczenie 202 Temat: Układy kombinacyjne 1. el ćwiczenia Ćwiczenie ma na celu praktyczne zapoznanie
Wykład 9. Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego:
 Serwonapędy w automatyce i robotyce Wykład 9 Piotr Sauer Katedra Sterowania i Inżynierii Systemów przełączających Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego: intuicyjna
Serwonapędy w automatyce i robotyce Wykład 9 Piotr Sauer Katedra Sterowania i Inżynierii Systemów przełączających Metody budowy schematu funkcjonalnego pneumatycznego układu przełączającego: intuicyjna
Podstawy Elektroniki dla Elektrotechniki. Liczniki synchroniczne na przerzutnikach typu D
 AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
AGH Katedra Elektroniki Podstawy Elektroniki dla Elektrotechniki Liczniki synchroniczne na przerzutnikach typu D Ćwiczenie 7 Instrukcja do ćwiczeń symulacyjnych 2016 r. 1 1. Wstęp Celem ćwiczenia jest
Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające
 Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Liczniki klasyfikacja Licznik asynchroniczny:
Technika Cyfrowa 1 wykład 11: liczniki sekwencyjne układy przełączające Dr inż. Jacek Mazurkiewicz Katedra Informatyki Technicznej e-mail: Jacek.Mazurkiewicz@pwr.edu.pl Liczniki klasyfikacja Licznik asynchroniczny:
Tab. 1 Tab. 2 t t+1 Q 2 Q 1 Q 0 Q 2 Q 1 Q 0
 Synteza liczników synchronicznych Załóżmy, że chcemy zaprojektować licznik synchroniczny o następującej sekwencji: 0 1 2 3 6 5 4 [0 sekwencja jest powtarzana] Ponieważ licznik ma 7 stanów, więc do ich
Synteza liczników synchronicznych Załóżmy, że chcemy zaprojektować licznik synchroniczny o następującej sekwencji: 0 1 2 3 6 5 4 [0 sekwencja jest powtarzana] Ponieważ licznik ma 7 stanów, więc do ich
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp:
 Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
Temat: Projektowanie i badanie liczników synchronicznych i asynchronicznych. Wstęp: Licznik elektroniczny - układ cyfrowy, którego zadaniem jest zliczanie wystąpień sygnału zegarowego. Licznik złożony
UKŁADY MIKROPROGRAMOWALNE
 UKŁAD MIKROPROGRAMOWALNE Układy sterujące mogą pracować samodzielnie, jednakże w przypadku bardziej złożonych układów (zwanych zespołami funkcjonalnymi) układ sterujący jest tylko jednym z układów drugim
UKŁAD MIKROPROGRAMOWALNE Układy sterujące mogą pracować samodzielnie, jednakże w przypadku bardziej złożonych układów (zwanych zespołami funkcjonalnymi) układ sterujący jest tylko jednym z układów drugim
Minimalizacja automatów niezupełnych.
 Minimalizacja automatów niezupełnych. Automatem zredukowanym nazywamy automat, który jest zdolny do wykonywania tej samej pracy, którą może wykonać dany automat, przy czym ma on mniejszą liczbę stanów.
Minimalizacja automatów niezupełnych. Automatem zredukowanym nazywamy automat, który jest zdolny do wykonywania tej samej pracy, którą może wykonać dany automat, przy czym ma on mniejszą liczbę stanów.
Podstawy Automatyki. Wykład 13 - Układy bramkowe. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
INSTYTUT CYBERNETYKI TECHNICZNEJ POLITECHNIKI WROCŁAWSKIEJ ZAKŁAD SZTUCZNEJ INTELIGENCJI I AUTOMATÓW
 e-version: dr inż. Tomasz apłon INTYTUT YBENETYI TEHNIZNE PLITEHNII WŁAWIE ZAŁA ZTUZNE INTELIGENI I AUTMATÓW Ćwiczenia laboratoryjne z Logiki Układów yfrowych ćwiczenie 23 temat: UŁAY EWENYNE. EL ĆWIZENIA
e-version: dr inż. Tomasz apłon INTYTUT YBENETYI TEHNIZNE PLITEHNII WŁAWIE ZAŁA ZTUZNE INTELIGENI I AUTMATÓW Ćwiczenia laboratoryjne z Logiki Układów yfrowych ćwiczenie 23 temat: UŁAY EWENYNE. EL ĆWIZENIA
Statyczne i dynamiczne badanie przerzutników - ćwiczenie 2
 tatyczne i dynamiczne badanie przerzutników - ćwiczenie 2. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz
tatyczne i dynamiczne badanie przerzutników - ćwiczenie 2. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz
Układy kombinacyjne i sekwencyjne. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 207 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: modelowanie i synteza kombinacyjnych układów przełączających; minimalizacja funkcji przełączającej; projektowanie
Warszawa 207 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: modelowanie i synteza kombinacyjnych układów przełączających; minimalizacja funkcji przełączającej; projektowanie
INSTYTUT CYBERNETYKI TECHNICZNEJ POLITECHNIKI WROCŁAWSKIEJ ZAKŁAD SZTUCZNEJ INTELIGENCJI I AUTOMATÓW
 INSTYTUT CYBERNETYKI TECHNICZNEJ POLITECHNIKI WROCŁAWSKIEJ ZAKŁAD SZTUCZNEJ INTELIGENCJI I AUTOMATÓW Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 207 temat: AUTOMATY MOORE A I MEALY 1.
INSTYTUT CYBERNETYKI TECHNICZNEJ POLITECHNIKI WROCŁAWSKIEJ ZAKŁAD SZTUCZNEJ INTELIGENCJI I AUTOMATÓW Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 207 temat: AUTOMATY MOORE A I MEALY 1.
Wstęp. Przygotowanie teoretyczne
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie LORATORIUM Teoria Automatów Temat ćwiczenia: Hazardy L.p. Imię i nazwisko Grupa ćwiczeniowa: Poniedziałek 8.00 Ocena Podpis 1. 2. 3. 4. Krzysztof
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie LORATORIUM Teoria Automatów Temat ćwiczenia: Hazardy L.p. Imię i nazwisko Grupa ćwiczeniowa: Poniedziałek 8.00 Ocena Podpis 1. 2. 3. 4. Krzysztof
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie LABORATORIUM Teoria Automatów. Grupa ćwiczeniowa: Poniedziałek 8.
 Akademia Górniczo-Hutnicza im. isława Staszica w Krakowie LABORATORIUM Teoria Automatów Temat ćwiczenia Przerzutniki L.p. Imię i nazwisko Grupa ćwiczeniowa: Poniedziałek 8.000 Ocena Podpis 1. 2. 3. 4.
Akademia Górniczo-Hutnicza im. isława Staszica w Krakowie LABORATORIUM Teoria Automatów Temat ćwiczenia Przerzutniki L.p. Imię i nazwisko Grupa ćwiczeniowa: Poniedziałek 8.000 Ocena Podpis 1. 2. 3. 4.
Podstawowe układy cyfrowe
 ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 4 Podstawowe układy cyfrowe Grupa 6 Prowadzący: Roman Płaneta Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi bramkami logicznymi,
ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 4 Podstawowe układy cyfrowe Grupa 6 Prowadzący: Roman Płaneta Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi bramkami logicznymi,
Temat 7. Dekodery, enkodery
 Temat 7. Dekodery, enkodery 1. Pojęcia: koder, dekoder, enkoder, konwerter kodu, transkoder, enkoder priorytetowy... Koderami (lub enkoderami) nazywamy układy realizujące proces zamiany informacji kodowanej
Temat 7. Dekodery, enkodery 1. Pojęcia: koder, dekoder, enkoder, konwerter kodu, transkoder, enkoder priorytetowy... Koderami (lub enkoderami) nazywamy układy realizujące proces zamiany informacji kodowanej
Wykład nr 1 Techniki Mikroprocesorowe. dr inż. Artur Cichowski
 Wykład nr 1 Techniki Mikroprocesorowe dr inż. Artur Cichowski ix jy i j {0,1} {0,1} Dla układów kombinacyjnych stan dowolnego wyjścia y i w danej chwili czasu zależy wyłącznie od aktualnej kombinacji stanów
Wykład nr 1 Techniki Mikroprocesorowe dr inż. Artur Cichowski ix jy i j {0,1} {0,1} Dla układów kombinacyjnych stan dowolnego wyjścia y i w danej chwili czasu zależy wyłącznie od aktualnej kombinacji stanów
Projekt Koder HDB-3. Wykonali: Agnieszka Sikorska, Łukasz Kokosza EiTI Politechnika Warszawska Warszawa Projekt UCYF Koder HDB-3
 Projekt Koder HDB-3 Wykonali: EiTI Politechnika Warszawska Warszawa 2005-1 1.Wstęp teoretyczny W wielokrotnych systemach o modulacji impulsowo-kodowej PCM sygnały cyfrowe są przed wysłaniem ich w linię
Projekt Koder HDB-3 Wykonali: EiTI Politechnika Warszawska Warszawa 2005-1 1.Wstęp teoretyczny W wielokrotnych systemach o modulacji impulsowo-kodowej PCM sygnały cyfrowe są przed wysłaniem ich w linię
KATEDRA INFORMATYKI TECHNICZNEJ. Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych. ćwiczenie 204
 Opracował: prof. dr hab. inż. Jan Kazimierczak KATEDA INFOMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 204 Temat: Hardware'owa implementacja automatu skończonego pełniącego
Opracował: prof. dr hab. inż. Jan Kazimierczak KATEDA INFOMATYKI TECHNICZNEJ Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 204 Temat: Hardware'owa implementacja automatu skończonego pełniącego
INSTYTUT CYBERNETYKI TECHNICZNEJ POLITECHNIKI WROCŁAWSKIEJ ZAKŁAD SZTUCZNEJ INTELIGENCJI I AUTOMATÓW
 INSTYTUT YERNETYKI TEHNIZNEJ POLITEHNIKI WROŁWSKIEJ ZKŁD SZTUZNEJ INTELIGENJI I UTOMTÓW Ćwiczenia laboratoryjne z Logiki Układów yfrowych ćwiczenie 22 temat: UKŁDY KOMINYJNE. EL ĆWIZENI Ćwiczenie ma na
INSTYTUT YERNETYKI TEHNIZNEJ POLITEHNIKI WROŁWSKIEJ ZKŁD SZTUZNEJ INTELIGENJI I UTOMTÓW Ćwiczenia laboratoryjne z Logiki Układów yfrowych ćwiczenie 22 temat: UKŁDY KOMINYJNE. EL ĆWIZENI Ćwiczenie ma na
Cel. Poznanie zasady działania i budowy liczników zliczających ustaloną liczbę impulsów. Poznanie kodów BCD, 8421 i Rys. 9.1.
 Ćwiczenie 8 Liczniki zliczające, kody BCD, 8421, 2421 Cel. Poznanie zasady działania i budowy liczników zliczających ustaloną liczbę impulsów. Poznanie kodów BCD, 8421 i 2421. Wstęp teoretyczny. Przerzutniki
Ćwiczenie 8 Liczniki zliczające, kody BCD, 8421, 2421 Cel. Poznanie zasady działania i budowy liczników zliczających ustaloną liczbę impulsów. Poznanie kodów BCD, 8421 i 2421. Wstęp teoretyczny. Przerzutniki
Układy sekwencyjne. 1. Czas trwania: 6h
 Instytut Fizyki oświadczalnej UG Układy sekwencyjne 1. Czas trwania: 6h 2. Cele ćwiczenia Poznanie zasad działania podstawowych typów przerzutników: RS, -latch,, T, JK-MS. Poznanie zasad działania rejestrów
Instytut Fizyki oświadczalnej UG Układy sekwencyjne 1. Czas trwania: 6h 2. Cele ćwiczenia Poznanie zasad działania podstawowych typów przerzutników: RS, -latch,, T, JK-MS. Poznanie zasad działania rejestrów
LEKCJA. TEMAT: Funktory logiczne.
 TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
WYKŁAD 8 Przerzutniki. Przerzutniki są inną niż bramki klasą urządzeń elektroniki cyfrowej. Są najprostszymi układami pamięciowymi.
 72 WYKŁAD 8 Przerzutniki. Przerzutniki są inną niż bramki klasą urządzeń elektroniki cyfrowej. ą najprostszymi układami pamięciowymi. PZEZUTNIK WY zapamietanie skasowanie Przerzutmik zapamiętuje zmianę
72 WYKŁAD 8 Przerzutniki. Przerzutniki są inną niż bramki klasą urządzeń elektroniki cyfrowej. ą najprostszymi układami pamięciowymi. PZEZUTNIK WY zapamietanie skasowanie Przerzutmik zapamiętuje zmianę
PAMIĘĆ RAM. Rysunek 1. Blokowy schemat pamięci
 PAMIĘĆ RAM Pamięć służy do przechowania bitów. Do pamięci musi istnieć możliwość wpisania i odczytania danych. Bity, które są przechowywane pamięci pogrupowane są na komórki, z których każda przechowuje
PAMIĘĆ RAM Pamięć służy do przechowania bitów. Do pamięci musi istnieć możliwość wpisania i odczytania danych. Bity, które są przechowywane pamięci pogrupowane są na komórki, z których każda przechowuje
f we DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu
 DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu f wy f P Podzielnik częstotliwości: układ, który na każde p impulsów na wejściu daje
DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu f wy f P Podzielnik częstotliwości: układ, który na każde p impulsów na wejściu daje
Ćwiczenie 6. Przerzutniki bistabilne (Flip-Flop) Cel
 Cel") Ćwiczenie 6 Przerzutniki bistabilne (Flip-Flop) Cel Poznanie zasady działania i charakterystycznych właściwości różnych typów przerzutników bistabilnych. Wstęp teoretyczny. Przerzutniki Flip-flop (FF),
Ćwiczenie 6 Przerzutniki bistabilne (Flip-Flop) Cel Poznanie zasady działania i charakterystycznych właściwości różnych typów przerzutników bistabilnych. Wstęp teoretyczny. Przerzutniki Flip-flop (FF),
Układy sekwencyjne - wiadomości podstawowe - wykład 4
 SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy sekwencyjne - wiadomości podstawowe - wykład 4 Adam Szmigielski aszmigie@pjwstk.edu.pl Laboratorium robotyki s09 SWB - Układy sekwencyjne
SWB - Układy sekwencyjne - wiadomości podstawowe - wykład 4 asz 1 Układy sekwencyjne - wiadomości podstawowe - wykład 4 Adam Szmigielski aszmigie@pjwstk.edu.pl Laboratorium robotyki s09 SWB - Układy sekwencyjne
Państwowa Wyższa Szkoła Zawodowa
 Państwowa Wyższa Szkoła Zawodowa w Legnicy Laboratorium Podstaw Elektroniki i Miernictwa Ćwiczenie nr 6 BADANIE UKŁADÓW SEKWENCYJNYCH A. Cel ćwiczenia. - Poznanie przeznaczenia i zasady działania przerzutnika
Państwowa Wyższa Szkoła Zawodowa w Legnicy Laboratorium Podstaw Elektroniki i Miernictwa Ćwiczenie nr 6 BADANIE UKŁADÓW SEKWENCYJNYCH A. Cel ćwiczenia. - Poznanie przeznaczenia i zasady działania przerzutnika
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Definicja 2. Twierdzenie 1. Definicja 3
 INSTYTUT CYBERNETYKI TECHNICZNEJ POLITECHNIKI WROCŁAWSKIEJ ZAKŁAD SZTUCZNEJ INTELIGENCJI I AUTOMATÓW Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 205 temat: ZASTOSOWANIE JĘZYKA WYRAŻEŃ
INSTYTUT CYBERNETYKI TECHNICZNEJ POLITECHNIKI WROCŁAWSKIEJ ZAKŁAD SZTUCZNEJ INTELIGENCJI I AUTOMATÓW Ćwiczenia laboratoryjne z Logiki Układów Cyfrowych ćwiczenie 205 temat: ZASTOSOWANIE JĘZYKA WYRAŻEŃ
W układach asynchronicznych statycznych są stosowane dwie metody realizacji pamięci. 226 4. Syntezu układów sekwencyjnych
 226 4. Syntezu układów sekwencyjnych wać z separowania całycli bloków i przeanalizować pary. Zamiast dodatkowego warunku,2,43, powstają wówczas dwa warunki,23 i,43, gdyż 2 I 4 przechodzą w. Łatwo można
226 4. Syntezu układów sekwencyjnych wać z separowania całycli bloków i przeanalizować pary. Zamiast dodatkowego warunku,2,43, powstają wówczas dwa warunki,23 i,43, gdyż 2 I 4 przechodzą w. Łatwo można
UKŁADY SEKWENCYJNE Opracował: Andrzej Nowak
 PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY SEKWENCYJNE Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ Układem sekwencyjnym nazywamy układ
PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY SEKWENCYJNE Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz http://pl.wikipedia.org/ Układem sekwencyjnym nazywamy układ
dr inż. Małgorzata Langer Architektura komputerów
 Instrukcja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią,
Instrukcja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią,
Programowalne układy logiczne
 Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,