Sterownik silnika krokowego. Aleksander Koreń
|
|
|
- Kazimiera Kołodziej
- 9 lat temu
- Przeglądów:
Transkrypt
1 Sterownik silnika krokowego Aleksander Koreń czerwca 2007

2 1 Cel projektu Celem projektu było zaprojektowanie mikroprocesorowego sterownika silnika krokowego umożliwiajacego regulację prędkości obrotowej. Sterownik ten miał komunikować sie z komputerem poprzez interfejs RS Budowa silnika krokowego Silnikiem krokowym wykorzystywanym w projekcie był silnik o zmiennej reluktancji (VR). Zjawisko reluktancji jest analogiczne do zjawiska rezystancji wystepuj acego przy przepływie pradu elektrycznego, lecz odnosi sie ono do strumienia magnetycznego. Prad przepływajacy przez uzwojenie powoduje powstanie linii sił pola magnetycznego, które skupiaja sie w obszarach o najmniejszej reluktancji. Siła ta powoduje ustawianie sie ruchomego rdzenia dokładnie wzdłuż linii pola magnetycznego. Obrócenie ruchomego elementu rdzenia zwieksza reluktancje obwodu, powoduje to powstanie momentu obrotowego starajacego sie obrócić rdzeń do pozycji poczatkowej. Ilustruje to poniższy rysunek. Rysunek 1: Powstawanie reluktancyjnego momentu obrotowego Silniki reluktancyjne posiadaja wirnik wykonany z miekkiej stali z nacietymi zebami. Przepływ pradu przez pare uzwojeń powoduje ustawienie sie zebów wirnika 1

3 naprzeciw zasilanych uzwojeń. Nie ma w tym przypadku znaczenia kierunek przepływu pradu, a jedynie jego wartość (jest to tak zwane sterowanie unipolarne, w przeciwieństwie do bipolarnego). Obrót wirnika osiagamy zasilajac kolejno sasiaduj ace ze soba uzwojenia. Rysunek 2: Budowa silnika o zmiennej reluktancji Silnik wykorzystany w projekcie posiada 3 pary uzwojeń. Końcówki zasilajace te uzwojenia wyprowadzone sa na zewnatrz za pomoca wtyczki zawierajacej 6 przewodów (kolory kabli : czarny, czerwony, niebieski, zielony, żółty, brazowy). Przewody te parami (czarny i czerwony, niebieski i zielony, żółty i brazowy) stanowia wejścia i wyjścia poszczególnych par uzwojeń. Wspomniana końcówka jest podłaczana do wyprowadzeń sterownika oznaczonych na schemacie jako X3-1 do X3-6. Nie ma tutaj znaczenia sposób podłaczenia (czarny kabel do X3-1 lub X3-6) gdyż unipolarna metoda sterowania silnikiem nie jest wrażliwa na kierunek pradu przepływajacego przez uzwojenia. 2
 stanowia wejścia i wyjścia poszczególnych par uzwojeń.")
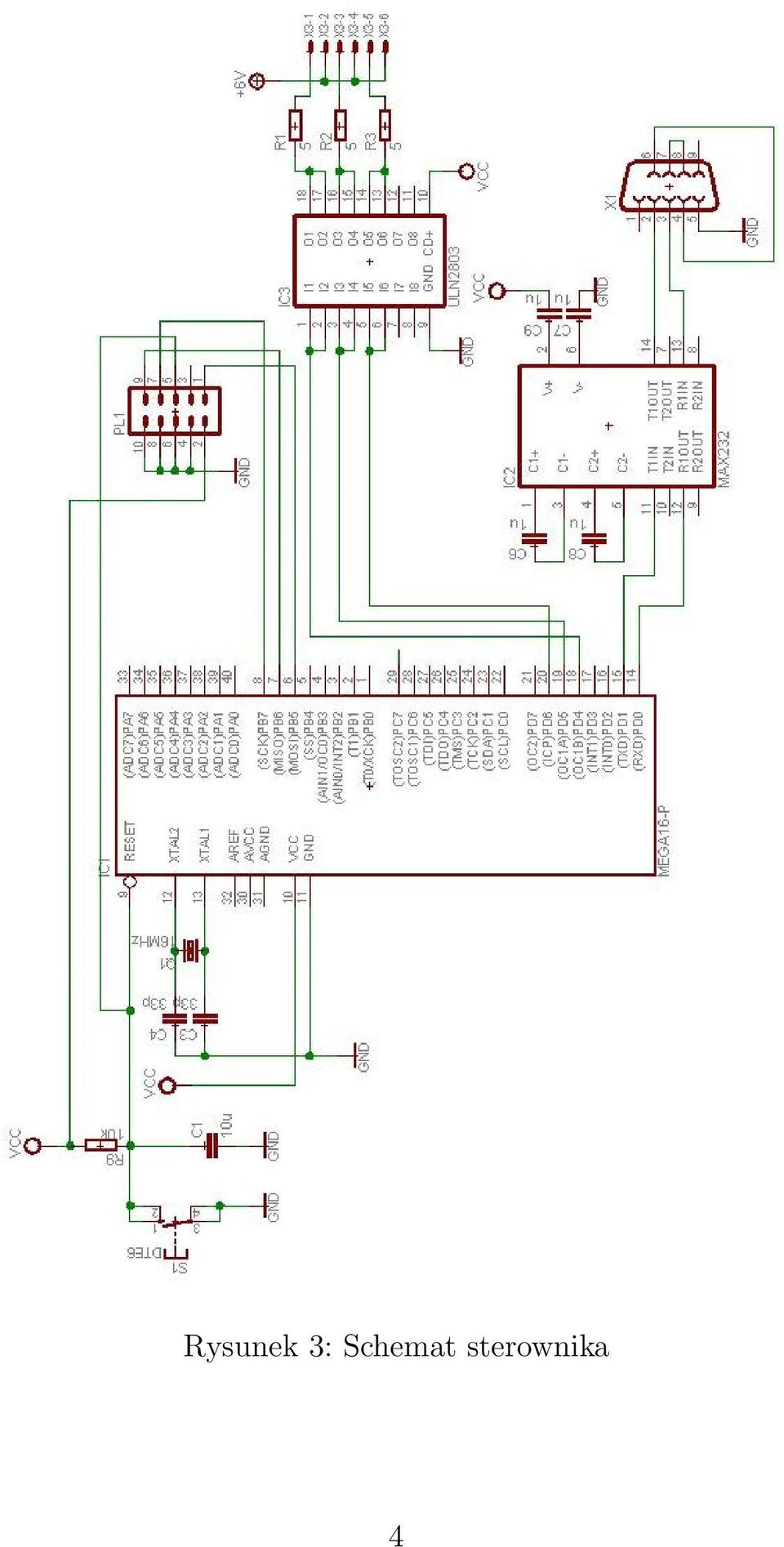
4 3 Budowa i zasada działania sterownika Sterownik został oparty na mikrokontrolerze Atmega16. Sygnał sterujacy z mikrokontrolera zostaje podany na stopień mocy ULN2803. Mikrokontroler obsługuje również komunikacje z komputerem za pomoca interfejsu RS232 (poprzez układ MAX232). Sterowanie obrotami silnika polega na sekwencyjnym podawaniu stanu wysokiego na kolejne wyjścia portu mikrokontrolera (PD4, PD5, PD6). Sygnał ten doprowadzony do wejść układu ULN2803 powoduje zwieranie wyjść tego układu do masy, a tym samym przepływ pradu przez kolejne uzwojenia silnika. Maksymalny prad, jaki możemy uzyskać z jednego wyjścia to ok. 500 ma, a wiec wyjścia te zostały połaczone równolegle parami, aby zwiekszyć nateżenie przepływajacego pradu. Silnik sterowany jest w trybie półkrokowym tzn. zasilane jest jedno uzwojenie lub dwa sasiednie, dzieki czemu uzyskujemy dwa razy wiecej stabilnych położeń niż przy sterowaniu pełnokrokowym (a tym samym płynniejszy ruch przy małych predkościach obrotowych). Sekwencja sterujaca wyglada nastepuj aco : krok uzwojenie 1 uzwojenie 2 uzwojenie gdzie : + zasilanie uzwojenia - brak zasilania uzwojenia Komunikacja z komputerem odbywa sie poprzez interfejs RS232 za pośrednictwem układu MAX232. Parametry transmisji wynosza : predkość 9600, brak kontroli parzystości, 1 bit stopu. Użytkownik ma możliwość przesyłania z komputera do mikroprocesora liczby która odpowiada określonej predkości obrotowej silnika. Komunikacja ta jest jednokierunkowa, sygnały przesyłane sa jedynie z komputera do układu. 3

5 Rysunek 3: Schemat sterownika 4
6 4 Oprogramowanie mikrokontrolera Program pisany był w j ezyku C z wykorzystaniem środowiska AVR Studio 3.56 wraz z kompilatorem AVRgcc. // Sterowanie predkoscia obrotowa silnika krokowego // za pomoca sygnalow przesylanych przez lacze RS-232 #include <c:\avrgcc\avr\include/io.h> #include <c:\avrgcc\avr\include/progmem.h> #include <c:\avrgcc\avr\include/stdlib.h> #include <c:\avrgcc\avr\include/interrupt.h> #define F_CPU ul //częstotliwosc zegara w Hz #define UART_BAUD 9600ul //predkosc transmisji #define UART_CONST (F_CPU/(16ul*UART_BAUD)-1) #define UZWOJENIE1_OFF PORTD &= 0xBF #define UZWOJENIE1_ON PORTD = 0x40 #define UZWOJENIE2_OFF PORTD &= 0xDF #define UZWOJENIE2_ON PORTD = 0x20 #define UZWOJENIE3_OFF PORTD &= 0xEF #define UZWOJENIE3_ON PORTD = 0x10 //sterowanie 1. uzwojeniem silnika //sterowanie 2. uzwojeniem silnika //sterowanie 3. uzwojeniem silnika // Funkcja opozniajaca void waitms(unsigned char x) unsigned char a, b; for( ; x > 0; --x) for(b = 10; b > 0; --b) for(a = 100; a > 0; --a) asm("nop"); 5
-1) #define UZWOJENIE1_OFF PORTD &= 0xBF #define")
7 // Procedura wykonujaca 1 obrot silnika, tryb pracy polkrokowy void obrot1(unsigned char czas) UZWOJENIE1_ON; UZWOJENIE3_OFF; UZWOJENIE2_ON; UZWOJENIE1_OFF; UZWOJENIE3_ON; UZWOJENIE2_OFF; // _UCR_ #define _UCR_ #endif #define _UCR_ #endif #define _UCR_ #endif // _USR_ #define _USR_ #endif #define _USR_ UCR UCSRB UCSR0B USR UCSRA UCR UCSRB UCSR0B USR UCSRA 6

8 #endif #define _USR_ #endif UCSR0A UCSR0A // Inicjalizacja portu szeregowego void UART_init(void) UBRRH = 0x00; UBRRL = (unsigned char)uart_const; UCSRB = (1<<RXCIE) (1<<RXEN) (1<<TXEN); // predkosc transmisji int main( void ) UART_init(); // program glowny // inicjalizacja portu szeregowego // konfiguracja portow I/O DDRD = 0xFE; PORTD = 0x01; unsigned char predkosc = 50; while(1) if (UDR!=0) predkosc=udr; UDR=0; obrot1(predkosc); return 0; 7
 if (UDR!")
9 5 Komunikacja z komputerem Komunikacje sterownika z komputerem zapewnia program napisany w Qt. Umożliwia on przesyłanie do sterownika poprzez interfejs RS232 liczby która odpowiada określonej predkości obrotowej silnika krokowego. Liczba ta jest interpretowana jako wartość opóźnienia w ms pomiedy poszczególnymi krokami w sekwencji sterujacej silnikiem. Zawiera sie ona w przedziale od 50 do 127. Sam program jest bardzo prosty, zawiera on jedynie suwak umożliwiajacy wstawienie konkretnej wartości oraz wyświetlacz wizualizujacy te wartość. Został on stworzony w Qt Designerze. Składa sie z czterech plików : silnik.ui zawierajacym projekt okna graficznego, silnik.ui.h zawierajacym procedure odpowiedzialna za komunikacje ze sterownikiem, silnik.pro oraz main.cpp. Rysunek 4: Program służacy do komunikacji ze sterownikiem 6 Wnioski Podstawowym problemem było ustalenie jakiego rodzaju jest posiadany silnik, gdyż to decydowało o wyborze rodzaju sterowania (bipolarne lub unipolarne). Było to o tyle proste, że silnik ten podczas obrotu nie wykazywał żadnego oporu (nie wyst epowało charakterystyczne przeskakiwanie). Wskazywało to na silnik 8

10 reluktancyjny. Kolejnym problemem był brak odpowiednich scalonych sterowników mogacych posłużyć do budowy układu. Zdecydowana wiekszośc sterowników dostepnych w sprzedaży była dostosowana do silników krokowych dwuuzwojeniowych (w tym najbardziej popularne L297 i L298N), tak wiec cały cieżar sterowania musiał zostać przeniesiony na strone programowa. Odbiło sie to na jakości sterowania. Przy małych predkościach obrotowych ruch wirnika nie jest płynny (pomimo zastosowania sterowania półkrokowego). Także moment obrotowy wytwarzany przez silnik jest bardzo mały, przy pradzie 500 ma na uzwojenie wystarcza on do obrotu wirnika, lecz jakikolwiek opór powoduje jego zatrzymanie. Literatura [1] Jarosław Doliński, Mikrokontrolery AVR w praktyce, Wydawnictwo BTC [2] Jacek Przepiórkowski, Silniki elektryczne w praktyce elektronika, Wydawnictwo BTC [3] Andrzej Pawluczuk, Sztuka programowania mikrokontrolerów AVR : podstawy, Wydawnictwo BTC [4] 9

Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska Oprac. na podst. : Potocki L., Elektronika dla Wszystkich, 2002 Program wg: Simon Monk, https://learn.adafruit.com/downloads/pdf/adafruitarduino-lesson-16-stepper-motors.pdf
Instytut Informatyki Politechnika Poznańska Oprac. na podst. : Potocki L., Elektronika dla Wszystkich, 2002 Program wg: Simon Monk, https://learn.adafruit.com/downloads/pdf/adafruitarduino-lesson-16-stepper-motors.pdf
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu. Jakub Stanisz
 WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
Silnik prądu stałego. Sterowanie silnika prądu stałego
 Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
Silnik prądu stałego Sterowanie silnika prądu stałego Specyfikacja silnika MT68 Napięcie zasilania: od 3 V do 6 V Prąd na biegu jałowym: 45 ma Obroty: 12100 obr/min dla 3 V Wymiary: 10 x 15 mm długość
StrK Sterownik bipolarnego silnika krokowego
 MKEiA Marek Kopeć, Zbigniew Rębisz s.c. 1/5 StrK Sterownik bipolarnego silnika krokowego Charakterystyka sterownika Maksymalny prąd na fazę 2.5A Maksymalne napięcie zasilania 35V Praca z 1, 1/2, 1/4, 1/8
MKEiA Marek Kopeć, Zbigniew Rębisz s.c. 1/5 StrK Sterownik bipolarnego silnika krokowego Charakterystyka sterownika Maksymalny prąd na fazę 2.5A Maksymalne napięcie zasilania 35V Praca z 1, 1/2, 1/4, 1/8
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu.
 Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Cel ćwiczenia. Przetwornik elektromagnetyczny. Silniki krokowe. Układ sterowania napędu mechatronicznego z silnikiem krokowym.
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
Silniki krokowe. 1. Podział siników krokowych w zależności od ich budowy.
 Silniki krokowe 1. Podział siników krokowych w zależności od ich budowy. 2. Rys.1. Podział silników krokowych. Ogólny podział silników krokowych dzieli je na wirujące i liniowe. Wśród bardziej rozpowszechnionych
Silniki krokowe 1. Podział siników krokowych w zależności od ich budowy. 2. Rys.1. Podział silników krokowych. Ogólny podział silników krokowych dzieli je na wirujące i liniowe. Wśród bardziej rozpowszechnionych
Systemy Wbudowane. Arduino dołączanie urządzeń Wersja Arduino więcej portów I/O. Układy serii 74. Układy serii 74xx a seria 40xx
 Arduino więcej portów I/O Systemy Wbudowane Arduino dołączanie urządzeń Wersja 08 mgr inż. Marek Wilkus Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Kraków Użycie pinów analogowych Liczniki
Arduino więcej portów I/O Systemy Wbudowane Arduino dołączanie urządzeń Wersja 08 mgr inż. Marek Wilkus Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Kraków Użycie pinów analogowych Liczniki
2.1 Porównanie procesorów
 1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
1 Wstęp...1 2 Charakterystyka procesorów...1 2.1 Porównanie procesorów...1 2.2 Wejścia analogowe...1 2.3 Termometry cyfrowe...1 2.4 Wyjścia PWM...1 2.5 Odbiornik RC5...1 2.6 Licznik / Miernik...1 2.7 Generator...2
OPIS STEROWNIKA 040 USB
 OPIS STEROWNIKA 040 USB Sterownik sklada sie z nastepujacych bloków: procesora sterujacego, driverów mocy dla 4 silników krokowych 12V / 1A / faze zasilacza stabilizowanego konwertera USB / RS232 TTL Komputer
OPIS STEROWNIKA 040 USB Sterownik sklada sie z nastepujacych bloków: procesora sterujacego, driverów mocy dla 4 silników krokowych 12V / 1A / faze zasilacza stabilizowanego konwertera USB / RS232 TTL Komputer
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery System przerwań laboratorium: 11 autorzy: dr hab. Zbisław Tabor, prof. PK mgr inż.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery System przerwań laboratorium: 11 autorzy: dr hab. Zbisław Tabor, prof. PK mgr inż.
Analogowy sterownik silnika krokowego oparty na układzie avt 1314
 Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
Funkcje standardowej biblioteki wejść-wyjść do wyświetlania i pobierania danych
 Funkcje standardowej biblioteki wejść-wyjść do wyświetlania i pobierania danych Przykłady wykorzystanie funkcji printf i scanf do wyświetlania danych na wyświetlaczu LCD oraz komunikacji sterownika mikroprocesorowego
Funkcje standardowej biblioteki wejść-wyjść do wyświetlania i pobierania danych Przykłady wykorzystanie funkcji printf i scanf do wyświetlania danych na wyświetlaczu LCD oraz komunikacji sterownika mikroprocesorowego
Mikrokontrolery AVR Wprowadzenie
 Mikrokontrolery AVR Wprowadzenie Komunikacja z otoczeniem mikrokontrolera Każdy z mikrokontrolerów posiada pewna liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Mikrokontrolery AVR Wprowadzenie Komunikacja z otoczeniem mikrokontrolera Każdy z mikrokontrolerów posiada pewna liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Inż. Kamil Kujawski Inż. Krzysztof Krefta. Wykład w ramach zajęć Akademia ETI
 Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
Inż. Kamil Kujawski Inż. Krzysztof Krefta Wykład w ramach zajęć Akademia ETI Metody programowania Assembler Język C BASCOM Assembler kod maszynowy Zalety: Najbardziej efektywny Intencje programisty są
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART ATmega Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
ĆWICZENIE 5. TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM
 ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
Kod produktu: MP01611-ZK
 ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM STEROWNIKÓW MIKROPROCESOROWYCH
 POLITECHNIKA WROCŁAWSKA INSTYTUT MASZYN I NAPĘDÓW ELEKTRYCZNYCH LABORATORIUM STEROWNIKÓW MIKROPROCESOROWYCH W NAPĘDZIE ELEKTRYCZNYM Opracowanie: mgr inż. Krzysztof P. Dyrcz mgr inż. Zdzisław Żarczyński
POLITECHNIKA WROCŁAWSKA INSTYTUT MASZYN I NAPĘDÓW ELEKTRYCZNYCH LABORATORIUM STEROWNIKÓW MIKROPROCESOROWYCH W NAPĘDZIE ELEKTRYCZNYM Opracowanie: mgr inż. Krzysztof P. Dyrcz mgr inż. Zdzisław Żarczyński
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Charakterystyka rozruchowa silnika repulsyjnego
 Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
Silnik repulsyjny Schemat połączeń silnika repulsyjnego Silnik tego typu budowany jest na małe moce i używany niekiedy tam, gdzie zachodzi potrzeba regulacji prędkości. Układ połączeń silnika repulsyjnego
OPIS STEROWNIKA 821B USB
 OPIS STEROWNIKA 821B USB Sterownik sklada sie z nastepujacych bloków: procesora sterujacego, przetwornika Analogowo/Cyfrowego 12 bitów 8 kanalów przetwornika Cyfrowo/Analogowego 12 bitów 1 kanal driverów
OPIS STEROWNIKA 821B USB Sterownik sklada sie z nastepujacych bloków: procesora sterujacego, przetwornika Analogowo/Cyfrowego 12 bitów 8 kanalów przetwornika Cyfrowo/Analogowego 12 bitów 1 kanal driverów
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
UW-DAL-MAN v2 Dotyczy urządzeń z wersją firmware UW-DAL v5 lub nowszą.
 Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
OPIS STEROWNIKA 841 USB
 OPIS STEROWNIKA 841 USB Sterownik sklada sie z nastepujacych bloków: procesora sterujacego, przetwornika Analogowo/Cyfrowego 12 bitów 8 kanalów przetwornika Cyfrowo/Analogowego 12 bitów 1 kanal (opcja)
OPIS STEROWNIKA 841 USB Sterownik sklada sie z nastepujacych bloków: procesora sterujacego, przetwornika Analogowo/Cyfrowego 12 bitów 8 kanalów przetwornika Cyfrowo/Analogowego 12 bitów 1 kanal (opcja)
ZL8AVR. Płyta bazowa dla modułów dipavr
 ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Wydział Elektroniki. Wykrywacz przewodów ściennych. Wizualizacja danych sensorycznych - projekt. Prowadzący: dr inż.
 Wydział Elektroniki Wykrywacz przewodów ściennych Wizualizacja danych sensorycznych - projekt Prowadzący: dr inż. Bogdan Kreczmer Wykonał: Jarosław Siarant 140410 Data: 14 czerwca 2008 1 Wstęp 1 1 Wstęp
Wydział Elektroniki Wykrywacz przewodów ściennych Wizualizacja danych sensorycznych - projekt Prowadzący: dr inż. Bogdan Kreczmer Wykonał: Jarosław Siarant 140410 Data: 14 czerwca 2008 1 Wstęp 1 1 Wstęp
STEROWNIK ŚWIATEŁ i SZLABANÓW SWS-4/485K/UK
 STEROWNIK ŚWIATEŁ i SZLABANÓW SWS-4/485K/UK Dziękujemy za wybór naszego produktu. Niniejsza instrukcja pomoże państwu w prawidłowym podłączeniu urządzenia, uruchomieniu, oraz umożliwi prawidłowe z niego
STEROWNIK ŚWIATEŁ i SZLABANÓW SWS-4/485K/UK Dziękujemy za wybór naszego produktu. Niniejsza instrukcja pomoże państwu w prawidłowym podłączeniu urządzenia, uruchomieniu, oraz umożliwi prawidłowe z niego
Programator procesorów rodziny AVR AVR-T910
 Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Dostęp do portów mikrokontrolera ATmega32 język C laboratorium: 10 autorzy: dr
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Dostęp do portów mikrokontrolera ATmega32 język C laboratorium: 10 autorzy: dr
Instrukcja Obsługi. Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH
 Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Instrukcja Obsługi Modułu wyjścia analogowego 4-20mA PRODUCENT WAG ELEKTRONICZNYCH RADWAG 26 600 Radom ul. Bracka 28, Centrala tel. (0-48) 38 48 800, tel./fax. 385 00 10, Dz. Sprzedaży (0-48) 366 80 06
Interfejs RS485-TTL KOD: INTR. v.1.0. Zastępuje wydanie: 2 z dnia 19.12.2012
 Interfejs RS485-TTL v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Rozmieszczenie elementów.... 3 3. Przyłączenie do magistrali RS485....
Interfejs RS485-TTL v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Rozmieszczenie elementów.... 3 3. Przyłączenie do magistrali RS485....
Silniki prądu stałego z komutacją bezstykową (elektroniczną)
") Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011
 Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
MODUŁ STEROWNICZY SMC 800 DO SILNIKÓW KROKOWYCH
 MODUŁ STEROWNICZY SMC 800 DO SILNIKÓW KROKOWYCH INSTRUKCJA OBSŁUGI Wprowadzenie Moduł SMC 800 służy do sterowania bipolarnych silników krokowych w przedziale małych mocy. Sterowanie modułu może być realizowane
MODUŁ STEROWNICZY SMC 800 DO SILNIKÓW KROKOWYCH INSTRUKCJA OBSŁUGI Wprowadzenie Moduł SMC 800 służy do sterowania bipolarnych silników krokowych w przedziale małych mocy. Sterowanie modułu może być realizowane
Uniwersalny sterownik silnika krokowego z portem szeregowym RS232 z procesorem AT90S2313 na płycie E200. Zestaw do samodzielnego montażu.
 microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
microkit E3 Uniwersalny sterownik silnika krokowego z portem szeregowym RS3 z procesorem AT90S33 na płycie E00. Zestaw do samodzielnego montażu..opis ogólny. Sterownik silnika krokowego przeznaczony jest
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia
 Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Ćwiczenie I v.18/2 Programowanie i uruchamianie serwo-kontrolera w napędowym układzie wykonawczym z silnikiem skokowym. Przebieg ćwiczenia Zał.1 - Silniki skokowe Zał.2 - Instrukcja obsługi sterownika
Interfejs USB-RS485 KOD: INTUR. v.1.0. Zastępuje wydanie: 2 z dnia 19.12.2012
 Interfejs USB-RS485 v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja interfejsu w systemie operacyjnym.... 4 3. Przyłączenie
Interfejs USB-RS485 v.1.0 KOD: PL Wydanie: 3 z dnia 05.12.2013 Zastępuje wydanie: 2 z dnia 19.12.2012 SPIS TREŚCI 1. Opis ogólny.... 3 2. Instalacja interfejsu w systemie operacyjnym.... 4 3. Przyłączenie
Systemy Wbudowane. Arduino - rozszerzanie. Podłączanie wyświetlacza LCD. Podłączanie wyświetlacza LCD. Podłączanie wyświetlacza LCD
 Wymagania: V, GND Zasilanie LED podswietlenia (opcjonalne) Regulacja kontrastu (potencjometr) Enable Register Select R/W (LOW) bity szyny danych Systemy Wbudowane Arduino - rozszerzanie mgr inż. Marek
Wymagania: V, GND Zasilanie LED podswietlenia (opcjonalne) Regulacja kontrastu (potencjometr) Enable Register Select R/W (LOW) bity szyny danych Systemy Wbudowane Arduino - rozszerzanie mgr inż. Marek
Instrukcja. Silnik Portos DELUX- R
 Instrukcja Silnik Portos DELUX- R Spis treści Podłączenia elektryczne str. 3 Ustawianie pozycji krańcowych str. 4 Dodawanie/usuwanie nadajników str. 9 Programowanie pozycji pośrednich str. 10 Edytowanie
Instrukcja Silnik Portos DELUX- R Spis treści Podłączenia elektryczne str. 3 Ustawianie pozycji krańcowych str. 4 Dodawanie/usuwanie nadajników str. 9 Programowanie pozycji pośrednich str. 10 Edytowanie
MIKROPROCESOROWY STEROWNIK PARAMETRÓW KLIMATYCZNYCH
 MIKROPROCESOROWY STEROWNIK PARAMETRÓW KLIMATYCZNYCH MPSK-G0 Opis Danych Technicznych wersja 2 1/5 1. Budowa i opis działania regulatora. 1.1. Przeznaczenie Panel wraz z układem wentylatorów przeznaczony
MIKROPROCESOROWY STEROWNIK PARAMETRÓW KLIMATYCZNYCH MPSK-G0 Opis Danych Technicznych wersja 2 1/5 1. Budowa i opis działania regulatora. 1.1. Przeznaczenie Panel wraz z układem wentylatorów przeznaczony
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Kacper Kulczycki. Krótko o silnikach krokowych (cz. 2.)
") Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
Kacper Kulczycki Krótko o silnikach krokowych (cz. 2.) Plan na dziś: Co to jest? Jakie są rodzaje silników krokowych? Ile z tym zabawy? Gdzie szukać informacji? Co to jest silnik krokowy? Norma PN 87/E
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Opis bezprzewodowego układu do pomiaru oporu elektrycznego skóry
 Opis bezprzewodowego układu do pomiaru oporu elektrycznego skóry Andrzej Jeziorski 307408 Układ powstały w ramach zaliczenia przedmiotu Programowanie Mikrokontrolerów miał być udoskonaleniem układu do
Opis bezprzewodowego układu do pomiaru oporu elektrycznego skóry Andrzej Jeziorski 307408 Układ powstały w ramach zaliczenia przedmiotu Programowanie Mikrokontrolerów miał być udoskonaleniem układu do
SILNIKI PRĄDU STAŁEGO
 SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
SILNIKI PRĄDU STAŁEGO SILNIK ELEKTRYCZNY JEST MASZYNĄ, KTÓRA ZAMIENIA ENERGIĘ ELEKTRYCZNĄ NA ENERGIĘ MECHANICZNĄ BUDOWA I DZIAŁANIE SILNIKA PRĄDU STAŁEGO Moment obrotowy silnika powstaje na skutek oddziaływania
Instrukcja obsługi sterownika TB6560-3v2 oraz programu Mach3
 Instrukcja obsługi sterownika TB6560-3v2 oraz programu Mach3 Podłączenie silników i zasilania do płytki Schemat 1 1.Silniki Układ obsługuje tylko cztero-przewodowe bipolarne silniki krokowe. Jeżeli posiadasz
Instrukcja obsługi sterownika TB6560-3v2 oraz programu Mach3 Podłączenie silników i zasilania do płytki Schemat 1 1.Silniki Układ obsługuje tylko cztero-przewodowe bipolarne silniki krokowe. Jeżeli posiadasz
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T
 Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane
Konfiguracja podstawowych parametrów falownikóww LG ig5a na przykładzie wentylatora RF/6-630T Falownik służy do regulacji pracy silników. Aby sterować pracą wentylatora należy do falownika wprowadzić dane
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
AVR DRAGON. INSTRUKCJA OBSŁUGI (wersja 1.0)
") AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
Zewnętrzne układy peryferyjne cz. 2 Wykład 13
 Zewnętrzne układy peryferyjne cz. 2 Wykład 13 EEPROM I2C Standardowa pamięć EEPROM I2C 2 Pamięć EEPROM I2C Pamięci EEPROM I2C są popularną rodziną prosty układów z pamięcią nieulotną EEPROM, kasowaną elektrycznie,
Zewnętrzne układy peryferyjne cz. 2 Wykład 13 EEPROM I2C Standardowa pamięć EEPROM I2C 2 Pamięć EEPROM I2C Pamięci EEPROM I2C są popularną rodziną prosty układów z pamięcią nieulotną EEPROM, kasowaną elektrycznie,
Programowanie mikrokontrolerów AVR
 Programowanie mikrokontrolerów AVR Czym jest mikrokontroler? Mikrokontroler jest małym komputerem podłączanym do układów elektronicznych. Pamięć RAM/ROM CPU wykonuje program Układy I/O Komunikacje ze światem
Programowanie mikrokontrolerów AVR Czym jest mikrokontroler? Mikrokontroler jest małym komputerem podłączanym do układów elektronicznych. Pamięć RAM/ROM CPU wykonuje program Układy I/O Komunikacje ze światem
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
LEKCJA TEMAT: Zasada działania komputera.
 LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
LEKCJA TEMAT: Zasada działania komputera. 1. Ogólna budowa komputera Rys. Ogólna budowa komputera. 2. Komputer składa się z czterech głównych składników: procesor (jednostka centralna, CPU) steruje działaniem
Kod produktu: MP01611-ZK
 ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
ZAMEK BEZSTYKOWY RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi gotowy do zastosowania bezstykowy zamek pracujący w technologii RFID dla transponderów UNIQUE 125kHz, zastępujący z powodzeniem
Sterowanie urządzeniami elektronicznymi przy użyciu portu LPT
 Romanek Wojciech kl. IV d Dokumentacja techniczna projektu: Sterowanie urządzeniami elektronicznymi przy użyciu portu LPT Zespół Szkół Elektronicznych w Rzeszowie 16 kwietnia 2007 1 Spis treści: Wstęp...
Romanek Wojciech kl. IV d Dokumentacja techniczna projektu: Sterowanie urządzeniami elektronicznymi przy użyciu portu LPT Zespół Szkół Elektronicznych w Rzeszowie 16 kwietnia 2007 1 Spis treści: Wstęp...
Z powyższej zależności wynikają prędkości synchroniczne n 0 podane niżej dla kilku wybranych wartości liczby par biegunów:
 Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Przetworniki pomiarowe obrotu i przesunięcia liniowego
 najwyższa na rynku odporność na wstrząsy ( 2500 m/s 2 ; 6 ms wg DINIEC 68227) podziałki: aż do 16384 (14 bit); jednoobrotowe wykonanie z wałem; średnica obudowy 58 mm stopień ochrony IP 65 liczne opcje
najwyższa na rynku odporność na wstrząsy ( 2500 m/s 2 ; 6 ms wg DINIEC 68227) podziałki: aż do 16384 (14 bit); jednoobrotowe wykonanie z wałem; średnica obudowy 58 mm stopień ochrony IP 65 liczne opcje
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
Dokumentacja Techniczno ruchowa: Moduł PSI (ver. PSI 1.0)
") Dokumentacja Techniczno ruchowa: Moduł PSI (ver. PSI 1.0) Moduł PSI (ver PSI 1.0) Wersja 2.1 Wydanie 0 Data wytworzenia dokumentu 29-12-2010 Data ostatniej modyfikacji 04 października 2011 Spis treści:
Dokumentacja Techniczno ruchowa: Moduł PSI (ver. PSI 1.0) Moduł PSI (ver PSI 1.0) Wersja 2.1 Wydanie 0 Data wytworzenia dokumentu 29-12-2010 Data ostatniej modyfikacji 04 października 2011 Spis treści:
Biomonitoring system kontroli jakości wody
 FIRMA INNOWACYJNO -WDROŻENIOWA ul. Źródlana 8, Koszyce Małe 33-111 Koszyce Wielkie tel.: 0146210029, 0146360117, 608465631 faks: 0146210029, 0146360117 mail: biuro@elbit.edu.pl www.elbit.edu.pl Biomonitoring
FIRMA INNOWACYJNO -WDROŻENIOWA ul. Źródlana 8, Koszyce Małe 33-111 Koszyce Wielkie tel.: 0146210029, 0146360117, 608465631 faks: 0146210029, 0146360117 mail: biuro@elbit.edu.pl www.elbit.edu.pl Biomonitoring
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32. Instrukcja Obsługi. SKN Chip Kacper Cyrocki Page 1
 Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
Płytka uruchomieniowa AVR oparta o układ ATMega16/ATMega32 Instrukcja Obsługi SKN Chip Kacper Cyrocki Page 1 Spis treści Wstęp... 3 Wyposażenie płytki... 4 Zasilanie... 5 Programator... 6 Diody LED...
Silniki prądu stałego. Wiadomości ogólne
 Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
MiniModbus 4DO. Moduł rozszerzający 4 wyjścia cyfrowe. Wyprodukowano dla. Instrukcja użytkownika
 Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
ZL15AVR. Zestaw uruchomieniowy dla mikrokontrolerów ATmega32
 ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL15AVR Zestaw uruchomieniowy dla mikrokontrolerów ATmega32 ZL15AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega32 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
Instrukcja obsługi programatora AVR Prog USB v2
 Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 Strona 1 Zawartość 1. Instalacja... 3 2. Instalacja sterowników w trybie HID.... 3 3. Programowanie
Instrukcja obsługi programatora AVR Prog USB v2 Instrukcja obsługi programatora AVR Prog USB v2, STK500 v2 Strona 1 Zawartość 1. Instalacja... 3 2. Instalacja sterowników w trybie HID.... 3 3. Programowanie
EKSPANDER WEJŚĆ ADRESOWALNYCH int-adr_pl 05/14
 INT-ADR EKSPANDER WEJŚĆ ADRESOWALNYCH int-adr_pl 05/14 Ekspander INT-ADR umożliwia rozbudowę systemu o maksymalnie 48 wejść adresowalnych. Obsługuje czujki, w których zainstalowany jest moduł adresowalny
INT-ADR EKSPANDER WEJŚĆ ADRESOWALNYCH int-adr_pl 05/14 Ekspander INT-ADR umożliwia rozbudowę systemu o maksymalnie 48 wejść adresowalnych. Obsługuje czujki, w których zainstalowany jest moduł adresowalny
Sterownik momentu obrotowego silnika prądu stałego
 Politechnika Wrocławska Projekt Sterownik momentu obrotowego silnika prądu stałego Autorzy: Paweł Bogner Marcin Dmochowski Prowadzący: mgr inż. Jan Kędzierski 30.04.2012 r. 1 Opis ogólny Celem projektu
Politechnika Wrocławska Projekt Sterownik momentu obrotowego silnika prądu stałego Autorzy: Paweł Bogner Marcin Dmochowski Prowadzący: mgr inż. Jan Kędzierski 30.04.2012 r. 1 Opis ogólny Celem projektu
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
Zestaw Startowy EvB. Więcej informacji na stronie: http://and-tech.pl/zestaw-evb-5-1/
 Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Ćwiczenie: "Silnik prądu stałego"
 Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Interface sieci RS485
 Interface sieci RS85 Model M-07 do Dydaktycznego Systemu Mikroprocesorowego DSM-5 Instrukcja uŝytkowania Copyright 007 by MicroMade All rights reserved Wszelkie prawa zastrzeŝone MicroMade Gałka i Drożdż
Interface sieci RS85 Model M-07 do Dydaktycznego Systemu Mikroprocesorowego DSM-5 Instrukcja uŝytkowania Copyright 007 by MicroMade All rights reserved Wszelkie prawa zastrzeŝone MicroMade Gałka i Drożdż
MultiTool instrukcja użytkownika 2010 SFAR
 MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
Przemysłowe Systemy Automatyki ĆWICZENIE 2
 Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów Przemysłowe Systemy Automatyki ĆWICZENIE 2 Sterowanie poziomem cieczy w zbiornikach Celem ćwiczenia jest zapoznanie z działaniem przekaźnika
Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów Przemysłowe Systemy Automatyki ĆWICZENIE 2 Sterowanie poziomem cieczy w zbiornikach Celem ćwiczenia jest zapoznanie z działaniem przekaźnika
Schemat blokowy architektury AVR
 Schemat blokowy architektury AVR Rejestry procesora AVR dostępne programowo Rejestry procesora AVR związane z pobraniem i wykonaniem rozkazu Schemat blokowy procesora ATMega 2560 ATMEL ATMEGA328P MEMORY
Schemat blokowy architektury AVR Rejestry procesora AVR dostępne programowo Rejestry procesora AVR związane z pobraniem i wykonaniem rozkazu Schemat blokowy procesora ATMega 2560 ATMEL ATMEGA328P MEMORY
Modułowy programowalny przekaźnik czasowy firmy Aniro.
 Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki:
 Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Laboratorium Elektroniki w Budowie Maszyn
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował: