Dynamika układów hydraulicznych
|
|
|
- Stanisława Paluch
- 8 lat temu
- Przeglądów:
Transkrypt
1 Zakład Napędów i Automatyki Hydraulicznej Instytut Konstrukcji i Eksploatacji Maszyn Politechnika Wrocławska Ćwiczenie nr 7 Dynamika układów hydraulicznych

2 . Wiadmości podstawowe: Wzrastające wymagania, dotyczące szybkości działania, stabilności powoduja konieczność uwzględnienia w projektowaniu układów hydraulicznych ich własności dynamicznych. Badania eksploatacyjne układów hydraulicznych maszyn roboczych ciężkich wykazują duży wpływ stanów przejściowych (rozruch, hamowanie) na pracę układu. Układy hydrauliczne napędowe i sterownicze podlegają różnym wymuszeniom powstającym podczas rozruchu hamowania mas, lub oddziaływania podłoża na układ. Jednym z najbardziej niebezpiecznych efektów wywołanych właściwościami dynamicznymi układu są uderzenia dynamiczne, powstające podczas przesterowania rozdzielaczy lub zaworów odcinających. Uderzenia dynamiczne wywołują krótkotrwałe wzrosty ciśnień o amplitudzie przewyższającej wartość ciśnienia ustalonego w instalacji, powodują bardzo duże przeciążenia węzłów konstrukcyjnych elementów uruchamiających, zaworów, rozdzielaczy, przewodów.. Cel ćwiczenia: Celem ćwiczenia jest doświadczalne określenie wielkości charakteryzujących wlaściwości dynamicznych układów sterujących i roboczych. Wyznaczenie przebiegów wielkości charakteryzujących układ, pozwala na ujawnienie zjawisk zachodzących w układzie sterującym lub roboczym, związanych ze stanami przejściowymi (rozruch, harmonia zakłócenia) i w ruchu ustalonym. Zakres ćwiczenia obejmuje pomiary: ) Przebiegi ciśnienia w funkcji czasu p=f(t). ) Przebiegi natężeń przepływów w funkcji czasu Q=f(t). 3) Przemieszczeń liniowych w funkcji czasu l=f(t). 4) Prędkości członów roboczych w funkcji czasu v=f(t). 5) Przyśpieszeń członów lub elementów w funkcji czasu a=f(t). 6) Prędkości kątowyc wału w funkcji czasu n=f(t). 3. Wskaźniki charakteryzujące właściwości dynamiczne układów hydraulicznych.. Jakość dynamiczna. W serwomechanizmach hydraulicznych układów kierowniczych lub innych układach nadążnych ze sprzężeniem zwrotnym mechanicznym albo hydraulicznym występuje pojęcie jakości dynamicznej. Przez jakość dynamiczna rozumie się zespół wielkości charakteryzujących właściwość dynamiczną układów, do których można m.in. zalkiczyć: wartość odchyleń maksymalnych, oscylacyjność, czas zanikania przebiegów przeejściowych, czas rozruchu, zapas fazy i amplitudy jako wynik analizy stabilności, dokładność odtwarzania sygnałów wyjściowych, wielkości uchybów powodowanych oddziaływaniem wymuszeń. Jakość dynamiczną określa się za pomocą wskaźników odnoszących się do poszczególnych przebiegów przejściowych wywołanych wymuszeniami skokowymi, harmonicznymi lub stochastycznymi umożliwiających przybliżoną lub dokładną ocenę przebiegu przejściowego układu hydraulicznego. W rzeczywistej eksploatacji maszyn najczęściej występują wymuszenia skokowe trapezoidalne. W ciężkich maszynach roboczych najczęstrzymi wymuszeniami są przesterowania rozdzielacza w czasie realizacji różnych cyklów pracy: podnoszenie wysięgu,

3 skrętu kół jezdnych itp. Wymuszenia pochodzące od koła kierownicy podczas skrętu kół jezdnych mogą mieć charakter wymuszeń trapezoidalnych jednostkowych lub skokowych. Zagadnienia jakości dynamicznej obejmują m.in.: -sposób dochodzenia układu do równowagi, -zachowanie sie układu w stanach przejściowych. W układach regulacji nadążnej, gdzie wymuszenie ciągle się zmienia, jakość dynamiczna obejmuje odtwarzanie przez układ zmian występujaćych w maszynie podczas eksploatacji w różnych warunkach pracy. W układach hydraulicznych występują przebiegi przejściowe wywołane wymuszeniami skokowymi: a)w układzie regulacji statycznej przy wymuszeniu skokowym: Rys 7. przebieg przejściowy w układzie regulacji statycznej przy wymuszeniu skokowym wymuszenie trapezoidalne wejściowe, odpowiedź skokowa układu regulacji. 3 odpowiedź układu zamknietego, τ, t e0, t e przedziały czasów: opóźnienia, maksym amplitudy i czas rozruchu, e p0, e p - amplitudy: maksymalna i rozruchu ε u - bład statyczny położenia, y(t) y (t) odpowiedż na wymuszenie skokowe W(t), T 0 - stała czasowa odpowidzi skokowej układu regulacji 3
w układzie regulacji statycznej przy wymuszeniu skokowym: Rys 7.")
4 b)w układzie regulacji statycznej przy skokowej zmianie zakłóceń: Rys 7. przebiegi przejściowe w układzie regulacji statycznej przy skokowej zmianie zakłócenia sygnał zakłócenia, odpowiedź układu regulacji, 3 odpowiedź skokowa układu zamknietego Z(t)- zakłócenia trapezoidalne 4
- zakłócenia")
5 c)w układzie regulacji statycznej aperiodyczny oi oscylacyjny: Rys 7.3 przebieg przejściowy w układzie regulacji statycznej: a aperiodyczny, b oscylacyjny t AI, t AII przebiegi czasów dla amplitud AI i AII d)w układzie regulacji astatycznej przy skokowej zmianie wartości zadanej Rys 7.4 przebieg przejściowy w układzie regulacji astatycznej przy skokowej zmianie wartości zadanej wymuszenie wejściowe, odpowiedź skokowa układu, 3 odpowiedź skokowa układu zamknietego 5

6 e)w układzie regulacji astatycznej przy skokowej zmianie zakłóceniowej: Rys 7.6 przebiegi przejściowe w układzie regulacji astatycznej przy skokowej zmianie zakłóceniowej a oscylacyjny, b aperiodyczny, - zakłócenie. Wskaźniki jakości dynamicznej: 3... Czas regulacji Czas regulacji jest to czas ustalenia się (t r ) przedizału czasu liczonego od rozpoczęcia przyłożenia wymuszenia do chwili po której odchylenie regulacji jest stale mniejsze od dopuszczalnych granic ± e. Przyjmue się przy tym,że e=0,05e m (e m jest odchyleniem maksymalnym) lub e=0,05e ust (e ust jest wartością odchylenia regulacji, jak ustaliłaby się w układzie bez regulatora). Zmniejszenie czasu absolutnego minimum można uzyskać przy zastosowaniu specjalnych optymalnych w sensie czasu regulatorów nieliniowych. Czas regulacji określa się również jako czas trwania przebiegu przejściowego, tzn. przyjmuje się że układ wytrącony z równowagi przez zakłócenie osiagnie ponownie ten stan po czasie (t r ). Rozróżnia się czas regulacji w odpowiedzi (skokowej) nadążnej t w i czas regulacji w odpowiedzi (skokowej) zakłóceniowej t z, które mogą być różne dla tego samego układu regulacji. Czas regulacji t r definiowany jest dla dopuszczalnego odchylenia następująco: sup oznacza kres góry zbioru {t r }, t t } i def t = sup { t }, (VII.) r i r r { i 6

7 3... Przeregulowanie Przeregulowanie jest to maksymalny uchyb przejściowy o kierunku przeciwnym niż maksymalny uchyb początkowy, odniesiony do maksymalnego uchybu początkowego i wyrażony w procentach, mierzony przy odpowiedzi skokowej układu regulacji. e p x p = *00% (VII.) e p0 W niektórych przebiegach wielkości charakteryzujących układ, niedopuszczalne jest są nawet chwilowe duże odchylenia regulacji, z tych względów wartość odchylenia maksymalnego jest bardzo istotna dla oceny układu. Rozróżnia się przeregulowanie odpowiedzi skokowej i zakłócniowej tego samego układu regulacji Maksymalne uderzenie dynamiczne Maksymalne odchylenie dynamiczne jest to maksymalna wartość wielkości charakteryzującej dynamiczne właściwości (np ciśnienia) występująca w zajestrowanym cyklu pomiarowym. Wskaźnik ten posiada duży wpływ nma trwałość węzłów konstrukcyjnych, uszczelnień przewodów, sprężyn w zaworach itp. Rys 7.7 Maksymalne odchylenie dynamiczne 7

8 3..4. Oscylacyjność Oscylacyjność charakteryzuje skłonność układu do oscylacji. Określa się ją bezwzględną wartościa stosunku amplitudy drugiego odchylenia do amplitudy pierwszego odchylenia: y y3 Osc % = *00%, Osc % = *00%, (VII.3) y y Rys 7.8 Ilustracja przebiegu oscylacyjnego y,, y,y 3 - amplitudy Współczynnik nadwyżki dynamicznej (współczynnik przewyższenia) Współczynnik ten jest miarą maksymalnych obciążeń naprężeń jakie mogą powstać w układzie w czasie trwania procesu przejściowego. Współczynnik dynamiczny określony jest stosunkiem: e e po ust ϕ d = (VII.4) eust Rys 7.9 Przebieg przejściowy wywołanym wymueszeniem skokowym 8
 Współczynnik ten jest miarą maksymalnych obciążeń naprężeń jakie mogą powstać w układzie w czasie")
9 3..6. Ustalony uchyb regulacji Ustalony uchyb regulacji ma w literaturze przedmiotu rózne nazwy np.odchylenie, błąd ustalony. Ustalony uchyb regulacji jest to wartość uchybu regulacji, ustalająca się po dostatecznie długim czasie po ustleniu wielkości zakłócającej i wielkości zadającej. Istnieją różne powody powstawania uchybów w stanie ustalonym np. tarcie suche uszczelek zgarniających i uszczelniających, zmiana sił hydrodynamicznych itp. Rys 7.0 Schemat blokowy serwomechanizmu Dla układu blokowego przedstawionego powyżej uchyb regulacji można wyrazić zależnością: ε ' = x t * G Y t * (VII.5) ( ) ( ) H Transmitancje w układzie zamknietym wyraża zależność: ε ' = G ( t) + KG H x (VII.6) Przy skokowej zmianie x=a syhgnał róznicy w stanie ustalonym otrzymuje się jako: G A s AG ε ' = lim s = lim s 0 + KG 0 H s + (VII.7) KGH! Przy skokowej zmianie prędkości x=vt sygnał różnicy wyznacza się ze wzoru na transmitancje ε ' G = lim * = lim v s 0 + KG H s s 0 s * G KG H (VII.8) Podobnie przy skokowym wymuszeniu przyśpieszenia otrzymano z wyrażenia: ε ' G = lim a s 0 s KG H at x = sygnał uchybu (VII.9) Uchyb ustalony, który może wystąpić w układach sterowania serwomechanizmu np kierowniczego, nie powinien przekroczyć pewnej z góry ustalonej dla danego procesu 9

10 wartości. Dla układów ze składową całkową uchyb ustalony teoretycznie powinien być równy zeru, ale może również przybierać małe wartości w związku z nieidealnością całkowania, pełzaniem zera rozdzielacza(położenie neutralne), strefą nieczułości itp. Ogólnie uchyb ustalony e k zwany w tym przypadku uchybem statycznym e s wyznacza się z zależności. e k ( ) = e( t) = G ( s) = e = e lim lim (VII.0) s t t e Współczynnik tłumienia ξ oraz częstość drgań ω Na podstawie przebiegów wielkości charakteryzujących właściwości dynamicznych wyznaczonych podczas badań eksperymentalnych można wyznaczyć współczynnik tłumienia ξ oraz częstość drgań ω. Rys 7. Przebieg przejściowy słabo tłumiony Współczynnik tłumienia ξ przyjmuje postać: l 3 ξ = n y (VII.) y y 3 4Π + l n y A częstość drgań ω z zależności: ω = T Π ξ (VII.) 0
 = e( t) = G ( s) = e = e lim lim (VII.0) s t t e 3..7.")
11 3..8. Wskaźniki dotyczące przebiegu charakterystyk częstotliwościowych Należy do nich współczynnik zwielokrotnienia amplitudy zdefiniowany jako: w( ω) u = w( 0), (VII.3) Gdzie: w(ω) moduł wektora częstotliwości funkcji przejścia dla dowolnej rozpatrywanej wartości pulsacji ω, w(0) moduł wektora częstotliwościowej funkcji przejścia dla częstotliwości ω=0 Rys 7. Wykres na płaszczyźnie zespolonej do wyznaczenia współczynnika uwielokrotnienia amplitudy u współczynnik uwielokrotnienia amplitudy, w 0 w moduł funkcji ω= 0 i dowolnej pulsacji ω Współczynnik ten służy do oceny stacjonarnych procesów dynamicznych (drgań wymuszonych). Znajduje zastosowanie do oceny jakości dynamicznej przy zmiennych obciążeniach Zapas fazy i amplitudy Zapas fazy i amplitudy oblicza się na podstawie kryteriów stosowanych w teori regulacji. Najczęsciej stosowane kryterium Nyquista. Rys 7.3 Charakterystyka amplitudowo-fazowa wyznaczanie zapasu fazy i amplitudy
. Znajduje zastosowanie do oceny jakości dynamicznej przy zmiennych obciążeniach. 3..8.")
12 Zapas fazy φ określa się w następujący sposób. Ze środka współrzędnych (0,0) rysuje się okrąg o promieniu. Punkt przejścia ω p należy połączyć z początkiem układu prostą l. Kąt jaki utworzy prosta l z ujemną osią rzeczywistą, jest zapasem fazy φ. Zapas wzmocnienia (w) wyznacza się mierząc odcinek a na osi odciętych, a następnie z zależności: w =, (VII.4) a Zapas modułu oblicza się z zależności: = 0log w. (VII.5) Zapas amplitudy zawarty w granicach od 0 do 5dB stanowi wartości wystarczające do zapewnienia dobrego tłumienia ewentualnych drgań wtórnych. Zapas fazy jest zawarty w granicach 0,53-,046 rad. Zapas wzmocnieniajest gwarancją, że układ zachowuje stabilność, mimo nieprzewidzianych zmian wzmocnienia w układzie otwartym. Zapas fazy jest gwarancją, że stabilność zostani9e zachowana, minmo istnienia szkodliwych opóźnień, których nie przewidziano przy nastawianiu układu sterowania. 3. Kryteria całkowe z odchyleniami w czasie Kryterium całkowe Kryterioum całkowe jest powszechnie stosowane w przypadku, gdy najważniejszymi parametrami regulacji sa czasy regulacji t r i odchylenie dynamiczne. Kryteria te dają możność oszacowania szybkości zanikania i odchylania przebiegów nieustalonych. Kryteria te są oparte na wielkości powierzchni opisanej przez krzywą przebiegu przejściowego lub przez kwadrat tego przebiegu. Obliczona powierzchnia powinna być jak najmniejsza, co świadczy o minimalnym odchyleniu lub najszybszym zanikaniu syhnałów. Po obliczeniu całki należy tak zminiać parametry, aby uzyskać najmniejszą wartość całki, co będzie odpowiadało układowi optymalnemu. Dla odchylenia dynamicznego e w układach astatycznych e=e z lub e=e w miarą jakości regulacji jest pole: Rys 7.4 Krzywe odchylenie przejściowego
 Zapas amplitudy zawarty w granicach od 0 do 5dB stanowi wartości wystarczające do zapewnienia dobrego tłumienia ewentualnych drgań wtórnych. Zapas fazy jest zawarty w granicach 0,53-,046 rad.")
13 Rys 7.5 Krzywe odchylenie przejściowego dla przebiegów statycznych Dla przebiegów statycznych wskaźnikiem jakości przebiegu jest pole: 0 A = [ est e( t)] dt. (VII.6) Kryterium to może dać poprawne wyniki, gdy przebieg przejściowy odbywa się bez przeregulowania, czyli odchylenie przejściowe e(t) jest funkcją zachowującą stały znak. W przypadku gdy e(t) jest funkcją znakozmienna, wówczas powierzchnie odejmują się i wynik mógłby być sprzeczny. Jest to wada metody. Całkę z zależności można przedstawić w zmienionej postaci: I = 0 ε ( t) dt = lim = lim G s 0 s z s 0 0 ε ( t) e (0) G s z st dt = limε ( s) = s 0 dgz ( s) ( s) = ds s= 0 = G ' z (0). (VII.7) Gdzie e jest przejściowym odchyleniem. Kryterium to wymaga minimalizacji pierwszej pochodnej funkcji G (s) dla s=0 w zależności od parametrów regulacji i można je stosować, gdy przebiegi przejściowe nie wykazują przeregulowania Kryterium całki z kwadrtu odchylenia w czasie Kryterium to jest często stosowane, ponieważ prowadzi do układów najmniej wrażliwych na zakłócenia przypadkowe, dla układów z opóźnieniem natomias daje się wyrazić w postaci analitycznej: I =[e(t)] dt, (VII.8) Przy czym e 0 przy t. 3
 dt = lim = lim G s 0 s z s 0 0 ε ( t) e (0) G s z st dt = limε ( s) = s 0 dgz ( s) ( s) = ds s= 0 = G ' z (0). (VII.")
14 Rys 7.6 Krzywe kwadratu odchylenie przejściowego Całka ta nie zależy od znaku nachylenia, a więc nie zależy od rodzaju przebiegu przejściowego. Całka będzie tym mniejsza, im mniejsza będzie suma zakreskowanych powierzchni obliczonych dla kwadratów rzędnych przebiegu (e). Kryterium to można obliczać na podstawie transformaty E(s) bez rozwiązywania równania charakterystycznego i przechodzenia na formę czasową, gdyż I = c+ i st e( t) dt = E( s) e ds e( t dt 0 πj c i ) 0 (VII.9) tj. przez przedstawienie e(t) za pomocą odwrotnej treansformaty Laplace a i pomniżenia przez e(t). Porządek całkowania można zmieniać wobec absolutnej zbierzności całek, czyli c+ iω st I = E( s) e( t) e dt ds (VII.0) πj c iω 0 st ponieważ e( t) e dt przedstawia transformatę E(-s) wobec czego 0 c+ i I = E( s) E( s) ds πj c i (VII.) Ponieważ rozważany układ jest stabilny, więc funkcja E(s) nie ma biegunów w prawej części płaszczyzny Gausa ani też w początku układu współrzędnych. Można więc przyjąć, że odcięta absolutnej zbieżności, c=0, s=iω. Wynika z tego następujący zapis: I Gz (0) Gz ( iω) = e( iω) dω dω π = π (VII.) iω 0 0 Kryterium to daje silne oscylacje i przebiegi przejściowe wymagające mocnego odziaływania regulacyjnego. Wartości optymalne wzmocnienia i czasu wyprzedzania są duże, a czasu zdwojenia małe. Wartości przeregulowania mogą sięgać 45%. 4
 tj. przez przedstawienie e(t) za pomocą odwrotnej treansformaty Laplace a i pomniżenia przez e(t).")
15 4. Maszyna badana lub stanowisko pomiarowe. Badania przeprowadza się na istniejącej maszynie (podnośnik widłowy, ładowarka, żuraw itp.) lub na stanowisku bedącym modelem fizycznym maszyny w odpowiedniej skali (rys.7.6). Układ hydrauliczny zbudowany jest z : zbiornika, filtru 3, zaworu odcinającego 4, pompy 6, rozdzielacza elektromagnetycznego 9, zaworu przełączającego 0, zestawu akumulatorów, rozdzielacza i silnika hydraulicznego 5. Układ pomiarowy tworzą czujniki ciśnień 7, 8, 5, czujnik natężeń przepływu 4, przepływomierz 4, czujnik przemieszczeń 6 (Xs i Ys) oraz miernik wielkości mechanicznych 7 oraz rejestrator 8. Obciążenie połączone jest liną z tłoczyskiem cylindra. 5. Sposób pomiaru wielkości charakteryzujących układ hydrauliczny. Wyznaczenie wielkości charakteryzujących układ roboczy takich jak: czas rozruchu, maksymalne dynamiczne odchylenie sygnału, oscylacyjność, współczynnik nadwyżek dynamicznych, opiera się na pomiarze następujacych przebiegów w funkcji czasu: ciśnienia w funkcji czasu p=f(t), natężenia przepływu w funkcji czasu Q=f(t), wymuszeń sygnałów wejściowych x=f(t) i odpowidzi Y=f(t). Pomiary wielkości charakteryzujących układ hydrauliczny można przeprowadzić dla różnych obciążeń wózka widłowego, przy różnych prędkościach czasu przesterowania suwaka, jak również przy włączaniu jednego lub kilku akumulatorów. Ciśnienia 7 i 8 mierzone są za pomocą pojemnościowych czujników ciśnień. Wzorcowanie czujników ciśnień należy przeprowadzić na prasce do manometrów, dla zakresu ciśnień od 0 do 5 kpa. Średnią wydajność pompy podczas pomiarów mierzona jest za pomocą czujników przepływów współpraującego ze wzmacniaczem 7 i rejestratorem 8. Przemieszczenia suwaka Xsi odpowiedź tłoka cylindra mierzone są za pomocą czujników przemieszczeń liniowych, współpracujących z miernikiem wielkości mechanicznych 7 i rejestratorem 8. Temperaturę w zbiorniku mierzono za pomocą termopompy 3, a w przewodzie tłocznym pompy temperaturę mierzono za pomocą termistorowego czujnika temperatury. Ciągłą rejestrację temperatury mierzono za pomocą rejestratora Badania dynamiki układów hydraulicznych. Badania należy przeprowadzać po ruchu próbnym układu, którego celem jest wykazanie prawidłowości pracy układu. Podczas ruchu próbnego należy sprawdzić nastawę zaworu bezpieczeństwa 3 i działanie rozdzielaczy 9 i oraz sprawdzić prawidłowość i powtarzalność wskazań przyżadów pomiarowych. Układ należy odpowietrzyć i sprawdzić prawidłowość połączeń instalacji hydraulicznej. Podczas próbnych uruchomień należy ustalić żądane natężenie przepływu na pompie lub za pomocą zaworu dławiącego 3 zależnie od wskazań prowadzacego zajęcia. (rys.7.7). Układ pozwala na realizację różnych cykli pracy np. Podnoszenie ciężaru skokami z zatrzymaniem aż dogórnego położenia, podnoszenie ciężaru od dolnego do górnego położenia, lub opuszczanie ciężaru z górnego położenia do dolnego z nagłym zatrzymaniem tuż nad podłożem. 5

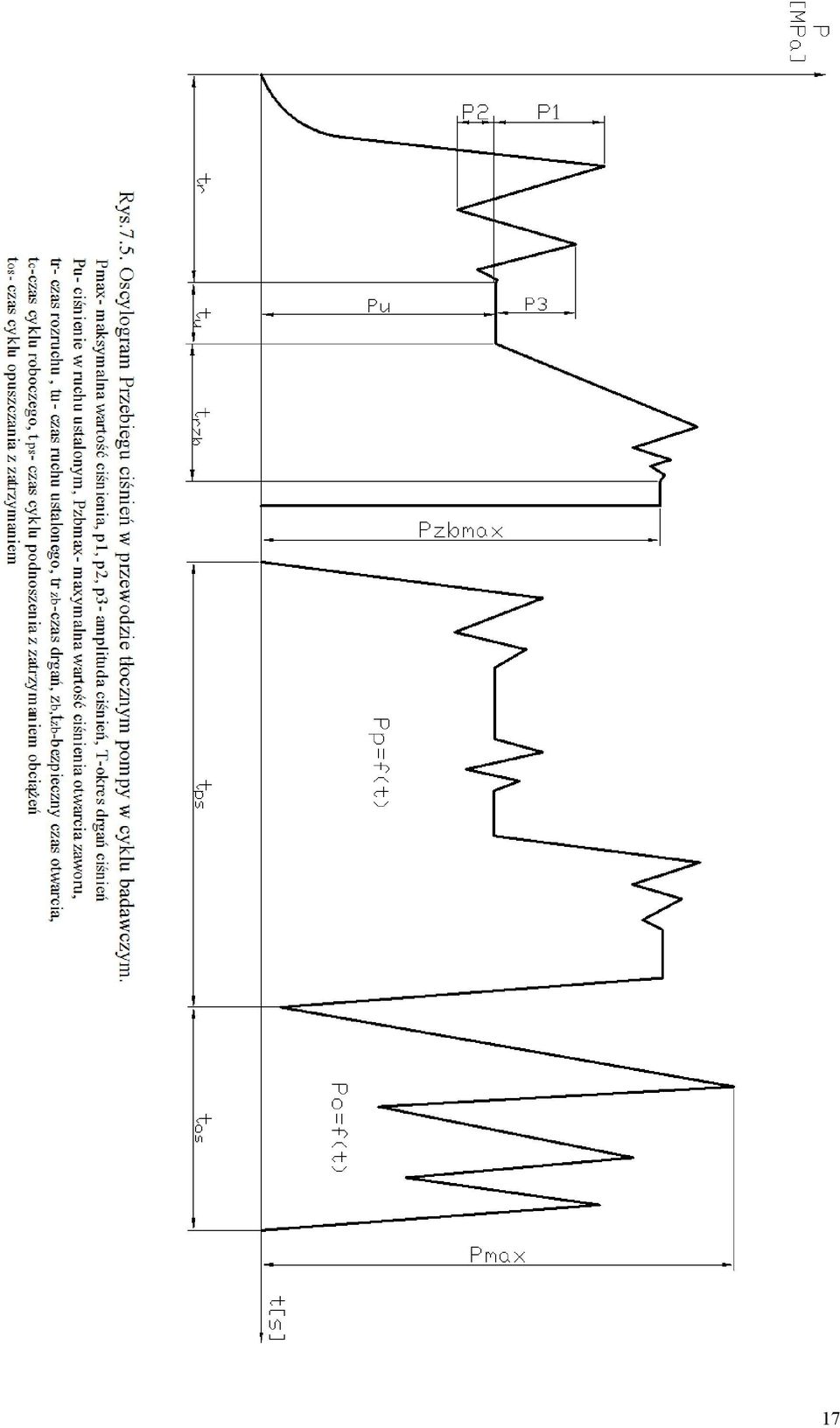
16 Po wyborze odpowiedniego cyklu pracy, wzorcowaniu i aparatury pomiarowej można rejestrować przebiegi w funkcji czasu poszczególnych wielkości charakteryzujących właściwości dynamiczne układu. 7. Opracowanie wyników pomiarów. Z otzrymanych oscylogramów przebiegów wielkości charakteryzujących właściwości dynamiczne układu wyznaczyć:. Czas rozruchu.. Oscylacyjność 3. Współczynnik nadwyżek dynamicznych. 4. Czas ruchu ustalonego. 5. Częstotliwość drgań układu, 6. Okres drgań układu. 7. Okres drgań i współczynnik tłumienia 8. Czas cyklu. Przykładowe przebiegi przedstawiają rys7.5 6

17 7
18 Rys.7.7..Zbiornik 5.Cylinder jednostronnego działania.filtr wlewowy 6.Czujnik ciśnienia indukcyjny 3.Filtr ssawny 7.Elektr. miernik wielkości mechanicznych 4.Zawór odcinający ZOK-3 8.Graficzny rejestrator wielkości mechaniczn. 5.Manometr - kg/m 9.Prowadnice wózka 6.Pompa wielotłoczkowa PTOZ 4OR 0.Wózek mechanicznie podnoszony 7.Czujnik ciśnienia.obciążenie 8.. Silnik napędzający pompę 9.Rozdzielacz KBS-0-60E 3.Czujnik natężenia przepływu 0.Zawór autom. Rozładow. AR-5 4.Zawór przelewowy ZP-63.Akumulator 5..Rozdzielacz 6.Czujnik temperatury 3.Zawór dławiący 7.Czujnik temperatury 4.Przepływomierz puszkowy P-40 8.Rejestrator temperatury 8

Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
Hydrostatyczne Układy Napędowe Laboratorium. Temat: Dynamika układów hydraulicznych wiadomości podstawowe
 Hydrostatyczne Układy Napędowe Laboratorium Temat: Dynamika układów hydraulicznych wiadomości podstawowe Opracował: Z. Kudźma, J. Rutański, M. Stosiak CEL ĆWICZENIA Celem ćwiczenia jest doświadczalne określenie
Hydrostatyczne Układy Napędowe Laboratorium Temat: Dynamika układów hydraulicznych wiadomości podstawowe Opracował: Z. Kudźma, J. Rutański, M. Stosiak CEL ĆWICZENIA Celem ćwiczenia jest doświadczalne określenie
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 13 Eksperymentalna analiza procesów dynamicznych w układach hydraulicznych Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak, K. Towarnicki
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 13 Eksperymentalna analiza procesów dynamicznych w układach hydraulicznych Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak, K. Towarnicki
4. Właściwości eksploatacyjne układów regulacji Wprowadzenie. Hs () Ys () Ws () Es () Go () s. Vs ()
 Ys () Ws () Es () Go () s. Vs ()") 4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
4. Właściwości eksploatacyjne układów regulacji 4.1. Wprowadzenie Zu () s Zy ( s ) Ws () Es () Gr () s Us () Go () s Ys () Vs () Hs () Rys. 4.1. Schemat blokowy układu regulacji z funkcjami przejścia 1
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Podstawy Automatyki laboratorium
 Cel ćwiczenia: Celem ćwiczenia jest uzyskanie wykresów charakterystyk skokowych członów róŝniczkujących mechanicznych i hydraulicznych oraz wyznaczenie w sposób teoretyczny i graficzny ich stałych czasowych.
Cel ćwiczenia: Celem ćwiczenia jest uzyskanie wykresów charakterystyk skokowych członów róŝniczkujących mechanicznych i hydraulicznych oraz wyznaczenie w sposób teoretyczny i graficzny ich stałych czasowych.
Układ regulacji automatycznej (URA) kryteria stabilności
 kryteria stabilności") Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
11. Dobór rodzaju, algorytmu i nastaw regulatora
 205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
205 11. Dobór rodzaju, algorytmu i nastaw regulatora 11.1 Wybór rodzaju i algorytmu regulatora Poprawny wybór rodzaju regulatora i jego algorytmu uzależniony jest od znajomości (choćby przybliżonej) właściwości
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ. T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
 T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia") REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ Y o (s) - E(s) B(s) /T I s K p U(s) Z(s) G o (s) Y(s) T I - czas zdwojenia (całkowania) T D - czas wyprzedzenia (różniczkowania) K p współczynnik wzmocnienia
MECHANIKA PŁYNÓW LABORATORIUM
 MECANIKA PŁYNÓW LABORATORIUM Ćwiczenie nr 4 Współpraca pompy z układem przewodów. Celem ćwiczenia jest sporządzenie charakterystyki pojedynczej pompy wirowej współpracującej z układem przewodów, przy różnych
MECANIKA PŁYNÓW LABORATORIUM Ćwiczenie nr 4 Współpraca pompy z układem przewodów. Celem ćwiczenia jest sporządzenie charakterystyki pojedynczej pompy wirowej współpracującej z układem przewodów, przy różnych
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ
 REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ 1 1. Zadania regulatorów w układach regulacji automatycznej Do podstawowych zadań regulatorów w układach regulacji automatycznej należą: porównywanie wartości
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak Poniższe materiały tylko dla studentów uczęszczających na zajęcia.
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Projektowanie układów regulacji w dziedzinie częstotliwości. dr hab. inż. Krzysztof Patan, prof. PWSZ
 Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Projektowanie układów regulacji w dziedzinie częstotliwości dr hab. inż. Krzysztof Patan, prof. PWSZ Wprowadzenie Metody projektowania w dziedzinie częstotliwości mają wiele zalet: stabilność i wymagania
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Podstawy Automatyki. Wykład 2 - podstawy matematyczne. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Wykład 2 - podstawy matematyczne Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje, wiele
Stabilność. Krzysztof Patan
 Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Stabilność Krzysztof Patan Pojęcie stabilności systemu Rozważmy obiekt znajdujący się w punkcie równowagi Po przyłożeniu do obiektu siły F zostanie on wypchnięty ze stanu równowagi Jeżeli po upłynięciu
Automatyka i sterowanie w gazownictwie. Regulatory w układach regulacji
 Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
Automatyka i sterowanie w gazownictwie Regulatory w układach regulacji Wykładowca : dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów AGH Ogólne zasady projektowania
III. DOŚWIADCZALNE OKREŚLANIE WŁAŚCIWOŚCI UKŁADÓW POMIAROWYCH I REGULACYJNYCH
 III. DOŚWIADCZALNE OKREŚLANIE WŁAŚCIWOŚCI UKŁADÓW POMIAROWYCH I REGULACYJNYCH Tak zwana identyfikacja charakteru i właściwości obiektu regulacji, a zwykle i całego układu pomiarowo-regulacyjnego, jest
III. DOŚWIADCZALNE OKREŚLANIE WŁAŚCIWOŚCI UKŁADÓW POMIAROWYCH I REGULACYJNYCH Tak zwana identyfikacja charakteru i właściwości obiektu regulacji, a zwykle i całego układu pomiarowo-regulacyjnego, jest
Rys 1 Schemat modelu masa- sprężyna- tłumik
 Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Plan wykładu. Własności statyczne i dynamiczne elementów automatyki:
 Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Plan wykładu Własności statyczne i dynamiczne elementów automatyki: - charakterystyka statyczna elementu automatyki, - sygnały standardowe w automatyce: skok jednostkowy, impuls Diraca, sygnał o przebiegu
Własności dynamiczne przetworników pierwszego rzędu
 1 ĆWICZENIE 7. CEL ĆWICZENIA. Własności dynamiczne przetworników pierwszego rzędu Celem ćwiczenia jest poznanie własności dynamicznych przetworników pierwszego rzędu w dziedzinie czasu i częstotliwości
1 ĆWICZENIE 7. CEL ĆWICZENIA. Własności dynamiczne przetworników pierwszego rzędu Celem ćwiczenia jest poznanie własności dynamicznych przetworników pierwszego rzędu w dziedzinie czasu i częstotliwości
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
WYDZIAŁ ELEKTRYCZNY KATEDRA AUTOMATYKI I ELEKTRONIKI. Badanie układu regulacji dwustawnej
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ATOMATYKI I ELEKTRONIKI ĆWICZENIE Nr 8 Badanie układu regulacji dwustawnej Dobór nastaw regulatora dwustawnego Laboratorium z przedmiotu: ATOMATYKA
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
Automatyka i robotyka
 Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Automatyka i robotyka Wykład 5 - Stabilność układów dynamicznych Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 43 Plan wykładu Wprowadzenie Stabilność modeli
Inżynieria Systemów Dynamicznych (5)
") Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny
Inżynieria Systemów Dynamicznych (5) Dokładność Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili? 1 DOKŁAD 2 Uchyb Podstawowy strukturalny
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Wprowadzenie. Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego.
 Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Ćwiczenie nr 6 Charakterystyki częstotliwościowe
 Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH
 POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 3 Prawo autorskie Niniejsze
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 3 Prawo autorskie Niniejsze
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności, dobór układów i parametrów regulacji, identyfikacja obiektów Kierunek studiów: Transport, Stacjonarne
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Regulator P (proporcjonalny)
") Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
Regulator P (proporcjonalny) Regulator P (Proportional Controller) składa się z jednego członu typu P (proporcjonalnego), którego transmitancję określa wzmocnienie: W regulatorze tym sygnał wyjściowy jest
2.2. Metoda przez zmianę strumienia magnetycznego Φ Metoda przez zmianę napięcia twornika Układ Ward-Leonarda
 5 Spis treści Przedmowa... 11 Wykaz ważniejszych oznaczeń... 13 1. Badanie silnika prądu stałego... 15 1.1. Elementy maszyn prądu stałego... 15 1.2. Zasada działania i budowa maszyny prądu stałego... 17
5 Spis treści Przedmowa... 11 Wykaz ważniejszych oznaczeń... 13 1. Badanie silnika prądu stałego... 15 1.1. Elementy maszyn prądu stałego... 15 1.2. Zasada działania i budowa maszyny prądu stałego... 17
DRGANIA ELEMENTÓW KONSTRUKCJI
 DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Badanie transformatora
 Ćwiczenie 14 Badanie transformatora 14.1. Zasada ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. Do jednego uzwojenia (pierwotnego) przykłada się zmienne
Ćwiczenie 14 Badanie transformatora 14.1. Zasada ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. Do jednego uzwojenia (pierwotnego) przykłada się zmienne
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA
 WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
WYDZIAŁ ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI INSTYTUT AUTOMATYKI I INFORMATYKI KIERUNEK AUTOMATYKA I ROBOTYKA STUDIA STACJONARNE I STOPNIA PRZEDMIOT : : LABORATORIUM PODSTAW AUTOMATYKI 9. Dobór nastaw
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników
 Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
WIBROIZOLACJA określanie właściwości wibroizolacyjnych materiałów
 LABORATORIUM WIBROAUSTYI MASZYN Wydział Budowy Maszyn i Zarządzania Instytut Mechaniki Stosowanej Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr WIBROIZOLACJA określanie właściwości wibroizolacyjnych
LABORATORIUM WIBROAUSTYI MASZYN Wydział Budowy Maszyn i Zarządzania Instytut Mechaniki Stosowanej Zakład Wibroakustyki i Bio-Dynamiki Systemów Ćwiczenie nr WIBROIZOLACJA określanie właściwości wibroizolacyjnych
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 3 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 32 Plan wykładu Wprowadzenie Układ pierwszego rzędu Układ drugiego
Technika regulacji automatycznej Wykład 3 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 32 Plan wykładu Wprowadzenie Układ pierwszego rzędu Układ drugiego
Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa. Instrukcja do zajęć laboratoryjnych
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie przebiegów regulacyjnych dwustawnego regulatora ciśnienia
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie przebiegów regulacyjnych dwustawnego regulatora ciśnienia
Podstawowe człony dynamiczne
 . Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
. Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
Opis matematyczny. Równanie modulatora. Charakterystyka statyczna. Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy. dla 0 v c.
 Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH
 POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMNS Semestr zimowy studia niestacjonarne Wykład nr
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMNS Semestr zimowy studia niestacjonarne Wykład nr
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
ĆWICZENIE WYZNACZANIE CHARAKTERYSTYK POMPY WIROWEJ
 ĆWICZENIE WYZNACZANIE CHARAKTERYSTYK POMPY WIROWEJ 1. Cel i zakres ćwiczenia Celem ćwiczenia jest opanowanie umiejętności dokonywania pomiarów parametrów roboczych układu pompowego. Zapoznanie z budową
ĆWICZENIE WYZNACZANIE CHARAKTERYSTYK POMPY WIROWEJ 1. Cel i zakres ćwiczenia Celem ćwiczenia jest opanowanie umiejętności dokonywania pomiarów parametrów roboczych układu pompowego. Zapoznanie z budową
symbol graficzny Kierunek przepływu i oznaczenie czynnika hydraulicznego Kierunek przepływu i oznaczenie czynnika pneumatycznego
 / / Symbole ogólne symbol graficzny opis Kierunek przepływu i oznaczenie czynnika hydraulicznego Kierunek przepływu i oznaczenie czynnika pneumatycznego Zmienność albo nastawialność (pompy, sprężyny, itp.)
/ / Symbole ogólne symbol graficzny opis Kierunek przepływu i oznaczenie czynnika hydraulicznego Kierunek przepływu i oznaczenie czynnika pneumatycznego Zmienność albo nastawialność (pompy, sprężyny, itp.)
Pomiar rezystancji metodą techniczną
 Pomiar rezystancji metodą techniczną Cel ćwiczenia. Poznanie metod pomiarów rezystancji liniowych, optymalizowania warunków pomiaru oraz zasad obliczania błędów pomiarowych. Zagadnienia teoretyczne. Definicja
Pomiar rezystancji metodą techniczną Cel ćwiczenia. Poznanie metod pomiarów rezystancji liniowych, optymalizowania warunków pomiaru oraz zasad obliczania błędów pomiarowych. Zagadnienia teoretyczne. Definicja
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO
 TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
INSTRUKCJA DO ĆWICZENIA NR 7
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Korekcja układów regulacji
 Korekcja układów regulacji Powszechnym sposobem wpływania na jakość procesów regulacji jest wprowadzenie urządzeń (członów) korekcyjnych. W przeważającej większości przypadków niezbędne jest umieszczenie
Korekcja układów regulacji Powszechnym sposobem wpływania na jakość procesów regulacji jest wprowadzenie urządzeń (członów) korekcyjnych. W przeważającej większości przypadków niezbędne jest umieszczenie
4. UKŁADY II RZĘDU. STABILNOŚĆ. Podstawowe wzory. Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat. Transmitancja układu zamkniętego
 4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
4. UKŁADY II RZĘDU. STABILNOŚĆ Podstawowe wzory Układ II rzędu ze sprzężeniem zwrotnym Standardowy schemat (4.1) Transmitancja układu zamkniętego częstotliwość naturalna współczynnik tłumienia Odpowiedź
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI
 1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 01/18. WIESŁAW FIEBIG, Wrocław, PL WUP 08/18 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Podział regulatorów: I. Regulatory elektroniczne: II. Regulatory bezpośredniego działania: III. Regulatory dwustawne i trójstawne:
 REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
Drgania wymuszone - wahadło Pohla
 Zagadnienia powiązane Częstość kołowa, częstotliwość charakterystyczna, częstotliwość rezonansowa, wahadło skrętne, drgania skrętne, moment siły, moment powrotny, drgania tłumione/nietłumione, drgania
Zagadnienia powiązane Częstość kołowa, częstotliwość charakterystyczna, częstotliwość rezonansowa, wahadło skrętne, drgania skrętne, moment siły, moment powrotny, drgania tłumione/nietłumione, drgania
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 3 BADANIE CHARAKTERYSTYK CZASOWYCH LINIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia są pomiary i analiza
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
K p. K o G o (s) METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych
 METODY DOBORU NASTAW Metoda linii pierwiastkowych Metody analityczne Metoda linii pierwiastkowych") METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
METODY DOBORU NASTAW 7.3.. Metody analityczne 7.3.. Metoda linii pierwiastkowych 7.3.2 Metody doświadczalne 7.3.2.. Metoda Zieglera- Nicholsa 7.3.2.2. Wzmocnienie krytyczne 7.3.. Metoda linii pierwiastkowych
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności obiektów automatyzacji, Wpływ sprzężenia zwrotnego na stabilność obiektów Kierunek studiów: Transport,
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Analiza stabilności obiektów automatyzacji, Wpływ sprzężenia zwrotnego na stabilność obiektów Kierunek studiów: Transport,
Modelowanie wybranych. urządzeń mechatronicznych
 Modelowanie wybranych elementów torów pomiarowych urządzeń mechatronicznych Pomiary - element sterowania napędem mechatronicznym Układ napędowy - Zintegrowane czujniki Zewnetrzne sygnały sterujące Sprzężenia
Modelowanie wybranych elementów torów pomiarowych urządzeń mechatronicznych Pomiary - element sterowania napędem mechatronicznym Układ napędowy - Zintegrowane czujniki Zewnetrzne sygnały sterujące Sprzężenia
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI
 PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
LABORATORIUM POMIARY W AKUSTYCE. ĆWICZENIE NR 4 Pomiar współczynników pochłaniania i odbicia dźwięku oraz impedancji akustycznej metodą fali stojącej
 LABORATORIUM POMIARY W AKUSTYCE ĆWICZENIE NR 4 Pomiar współczynników pochłaniania i odbicia dźwięku oraz impedancji akustycznej metodą fali stojącej 1. Cel ćwiczenia Celem ćwiczenia jest poznanie metody
LABORATORIUM POMIARY W AKUSTYCE ĆWICZENIE NR 4 Pomiar współczynników pochłaniania i odbicia dźwięku oraz impedancji akustycznej metodą fali stojącej 1. Cel ćwiczenia Celem ćwiczenia jest poznanie metody
Badanie transformatora
 Ćwiczenie 14 Badanie transformatora 14.1. Zasada ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. Do jednego uzwojenia (pierwotnego) przykłada się zmienne
Ćwiczenie 14 Badanie transformatora 14.1. Zasada ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. Do jednego uzwojenia (pierwotnego) przykłada się zmienne
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym
 Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Ćwiczenie nr 3 Układy sterowania w torze otwartym i zamkniętym 1. Cel ćwiczenia Celem ćwiczenia jest analiza właściwości układu sterowania w torze otwartym, zamkniętym oraz zamkniętym z kompensacją zakłóceń.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Podstawy Automatyki Zbiór zadań dla studentów II roku AiR oraz MiBM
 Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Aademia GórniczoHutnicza im. St. Staszica w Kraowie Wydział Inżynierii Mechanicznej i Robotyi Katedra Automatyzacji Procesów Podstawy Automatyi Zbiór zadań dla studentów II rou AiR oraz MiBM Tomasz Łuomsi
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 5 Zastosowanie zaworu zwrotnego sterowanego w układach hydraulicznych maszyn roboczych Opracowanie: P. Jędraszczyk, Z. Kudżma, P. Osiński,
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 5 Zastosowanie zaworu zwrotnego sterowanego w układach hydraulicznych maszyn roboczych Opracowanie: P. Jędraszczyk, Z. Kudżma, P. Osiński,
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych
 Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 1 Charakterystyka zasilacza hydraulicznego Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 1 Charakterystyka zasilacza hydraulicznego Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Zajęcia laboratoryjne Napęd Hydrauliczny
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 11 Sterowanie objętościowe konwencjonalne Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 11 Sterowanie objętościowe konwencjonalne Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Laboratorium z podstaw automatyki
 Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Wydział Inżynierii Mechanicznej i Mechatroniki Laboratorium z podstaw automatyki Dobór parametrów układu regulacji, Identyfikacja parametrów obiektów dynamicznych Kierunek studiów: Transport, Stacjonarne
Transformata Laplace a to przekształcenie całkowe funkcji f(t) opisane następującym wzorem:
 opisane następującym wzorem:") PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.
PPS 2 kartkówka 1 RÓWNANIE RÓŻNICOWE Jest to dyskretny odpowiednik równania różniczkowego. Równania różnicowe to pewne związki rekurencyjne określające w sposób niebezpośredni wartość danego wyrazu ciągu.