Biomechanika Inżynierska
|
|
|
- Sebastian Zalewski
- 6 lat temu
- Przeglądów:
Transkrypt
1 wykład 1 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1
2 Sprawy organizacyjne Wykład: Wykład i laboratorium: dr inż. Szymon Cygan pok. 40 tel s.cygan@mchtr.pw.edu.pl Konsultacje: wtorki godz dr inż. Krzysztof Wildner pok. 408 / 155 tel. k.wildner@mchtr.pw.edu.pl Konsultacje: wtorki godz
3 Sprawy organizacyjne Regulamin przedmiotu 3
4 Sprawy organizacyjne System oceny Laboratorium 40% oceny Musi być zaliczone (przekroczone 50% punktów) Wykład 60% oceny Musi być zaliczony (przekroczone 50% punktów) Egzamin test wielokrotnego wyboru, krótkie pytania opisowe, zadania 2 x połówkowy; 2 x w sesji; 1 x we wrześniu Ewentualne dodatkowe punkty z prac domowych (?) 4
5 Sprawy organizacyjne Wykład: UWAGA: przydział prowadzących może ulec zmianie Data Prowadzi KW SC KW SC KW SC KW SC/KW SC KW KW SC KW SC SC/KW Uwagi 0,5 po dł. Week pkn południa 0 5
6 Treści wg katalogu ECTS 1. Wprowadzenie: podstawowe pojęcia biomechaniki i definicje: elementy strukturalne biomechanizmów, łańcuchy biokinematyczne, stopnie swobody i ruchliwość biomechanizmów. 2. Statyka aparatu ruchu: budowa oraz mechaniczne i fizyczne właściwości struktur kostno-stawowych człowieka. Podstawy wytrzymałości materiałów tkankowych. Metodologia badania własności mechanicznych tkanek. Parametry postawy ciała postawa prawidłowa i patologiczna. 3. Kinematyka aparatu ruchu: modele stosowane do opisu kinematyki narządu ruchu; wyznaczanie ruchliwości poszczególnych stawów; metody opisu, rejestracji i analizy ruchu człowieka. 4. Dynamika aparatu ruchu: fizjologia układu nerwowo - mięśniowego; modele wykorzystywane do obliczania obciążeń przenoszonych przez poszczególne elementy aparatu ruchu; metody wyznaczania siły mięśniowej oraz obciążeń w stawach. 5. Budowa i biomechanika kręgosłupa: budowa 4kręgosłupa i jego własności mechaniczne; modele obciążeń kręgosłupa; stany patologiczne. 6. Biomechanika urazów: biomechaniczne aspekty przeciążania struktur tkankowych; mechanizmy urazów; zdolności adaptacyjne organizmu; zjawisko remodelingu. 7. Wprowadzenie do inżynierii rehabilitacyjnej: wymagania stawiane urządzeniom rehabilitacyjnym z uwagi na bezpieczeństwo pacjenta. 8. Urządzenia mechaniczne i mechaniczno-elektroniczne stosowane w rehabilitacji: ortozy i protezy kończyn dolnych i górnych, bioprotezy; funkcjonalna elektrostymulacja. 9. Fizjologiczne podstawy funkcjonowania struktur nerwowo mięśniowych 10. Sterowanie czynnością ruchową w warunkach naturalnych oraz z wykorzystaniem funkcjonalnej stymulacji elektrycznej. 11. Analiza, ocena ruchu i chodu człowieka: problematyka analizy ruchu człowieka (funkcji lokomocyjnych), urządzenia pomiarowe do badania chodu; analiza poszczególnych faz chodu i reakcji podłoża; pomiar energii wydatkowanej w trakcie chodu. 6
7 Sprawy organizacyjne Materiały do przedmiotu Na stronie Zakładu Inżynierii Biomedycznej (zib.mchtr.pw.edu.pl) W dziale Dydaktyka W zakładce Przedmioty Obowiązkowe 7
8 Literatura Hausmanowa - Petrusewicz I., "Elektromiografia kliniczna",pzwl Warszawa, 1983 Konturek St. J., "Fizjologia człowieka",elsevier Urban & Partner Wrocław, 2007 Merletti R., Parker A., "Electromyography - physiology, engineering and noninvasive applications",ieee Press 2004 Morecki A., Fidelus K., Ekiel J., "Bionika ruchu",pwn Paśniczek R., "Wybrane urządzenia wspomagające i fizykoterapeutyczne w rehabilitacji porażeń ośrodkowego układu nerwowego i amputacjach kończyn",oficyna Wydawnicza Politechniki Warszawskiej Warszawa, 1998 Perry J., "Gait Analysis: Normal and Pathological Function",SLACK Incorporated 2010 Whittle M., "Gait analysis - an introduction",butterworth Heinemann Elcevier 2007 A. White: "Clinical Biomechanics of the Spine", J. P. Lippincott Company, Philadelphia, 1990 Podstawy Biomechaniki", J. Mrozowski, J. Awrejcewicz, 2004 Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003, R. Będziński,
9 Wstęp Czym my się zajmujemy? 9
10 Wstęp Laboratorium Techniki Ultradźwiękowej w Zastosowaniach Medycznych: Elastografia i metody obrazowania odkształceń dla echokardiografii Zespół Biomechaniki: Metoda i urządzenie neuroprotezy do przywracania funkcji kończyny górnej utraconych w wyniku uszkodzenia splotu ramiennego (Analiza ruchu) 10




11 Wstęp Elastografia Framegrabber Interface module PCI Ultrasound probe Phantom PC Ultrasound scanner 11




12 Wstęp Obrazowanie odkształceń w echokardiografii 030%.3 10 c % b % % Wtrącenie % % % % %.2 Wtrącenie 12
13 Wstęp Metoda i model neuroprotezy do przywracania funkcji kończyny górnej utraconych w wyniku uszkodzenia splotu ramiennego Wzmacniacz transmiter Stymulator transmiter rf1 rf2 transmiter transmiter Jednostka centralna -przetwarzaniezasilanie 13
14 Biomechanika Czym jest BIOMECHANIKA? 14

15 Biomechanika Czym jest BIOMECHANIKA? 15
16 Biomechanika Biomechanika... - dział fizjologii zajmujący się badaniem ruchów człowieka i zwierząt z punktu widzenia praw fizyki i anatomiczno - fizjologicznych właściwości narządów ruchu (Słownik Języka Polskiego pod redakcją M. Szymczaka PWN 1978) - nauka o ruchu i mechanizmach ruch ten wywołujących ze szczególnym uwzględnieniem człowieka oraz zwierząt (Problemy Biocybernetyki i Inżynierii Biomedycznej, Tom V, "Biomechanika", redaktor M. Nałęcz, Wyd. Komunikacji i Łączności, 1990) - nauka zajmująca się badaniem mechanicznych właściwości tkanek i narządów oraz ruchem żywych organizmów, jego przyczynami i skutkami z punktu widzenia praw mechaniki (Wielka Internetowa Encyklopedia Multimedialna) 16
17 Biomechanika Biomechanika... jest nauką badającą siły zewnętrzne działające na struktury biologiczne i współdziałające z nimi siły wewnętrzne oraz efekty wywołane przez te siły (B. Nigg, W. Herzog, "Biomechanics", 1994) jest nauką, która bada struktury i funkcje systemów biologicznych przy użyciu wiedzy i metod mechaniki ("Podstawy Biomechaniki", J. Mrozowski, J. Awrejcewicz, 2004) jest to mechanika zastosowana do biologii ("Biomechanics. Mechanical properties of living tissues", Y. Fung, Springer, 1981) jest nauką zajmującą się działaniem wewnętrznych i zewnętrznych sił na ciało - strukturę biologiczną istot żywych oraz skutkami tych działań ("Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003) 17
18 Biomechanika obejmuje studiowanie i modelowanie ruchu; techniki pomiarowe, manipulację i lokomocję człowieka, zwierząt i owadów, badania postaw, własności mechanicznych i elektrycznych mięśni, tkanki łącznej, ścięgien biologicznych, własności mechanicznych i regulacyjnych układu szkieletowo-mięśniowego. (wg., R. Będzińskiego za A. Moreckim) 18
19 Wstęp Do czego taka Biomechanika może się przydać? 19
20 Wstęp 20
21 Wstęp Do czego taka Biomechanika może się przydać? Length: mm Weight: g Height: meters Weight: ,000 tons - mało wiarygodne dane internetowe 21
22 Wstęp Do czego taka Biomechanika może się przydać? Założenia: Założenia: Długość: 200 mm Waga: 60 g Wysokość: 75 m Waga: 10'000 ton 22
23 Wstęp Do czego taka Biomechanika może się przydać? Nacisk na stopę: Nacisk na stopę: F = mg = 0,6 N F = mg = 1 * 108N Masa: m = 60 g Przysp.: g=10m/s2 Masa: m = kg Przysp.: g=10m/s2 23
24 Wstęp Do czego taka Biomechanika może się przydać? F Nacisk na stopę: Nacisk na stopę: D L F = 0,6 N L = 2 cm D = 2 mm F = mg = 108N L = 20 m D=2m -F Kość piszczelowa 24
25 Wstęp Do czego taka Biomechanika może się przydać? F Nacisk na stopę: Nacisk na stopę: D L F = 0,6 N A = 3,14 * 10-6 m2 Ciśnienie: P = 0,12 MPa F = mg = 108N A = 3,14 m2 Ciśnienie: P = 32 MPa -F 25

26 Wstęp Do czego taka Biomechanika może się przydać? Ciśnienie w kości: Ciśnienie w kości: P = 0,12 MPa P = 32 MPa Wytrzymałość kości korowej człowieka (lity fragment kości udowej): Pmax = 100 MPa 26
:")
27 Wstęp Do czego taka Biomechanika może się przydać? Wytrzymałość kości korowej człowieka (lity fragment kości udowej): Pmax = 100 MPa 27


28 Wstęp Co z tego wynika? 28
29 Mechanika Dział fizyki zajmujący się opisem ruchu i odkształceń ciał materialnych lub ich części na skutek ich wzajemnych oddziaływań oraz badający stan równowagi między nimi. 30
30 Mechanika Statyka - dział mechaniki zajmujący się równowagą układów sił. Podstawowym problemem jest znajdowanie położenia równowagi w danej sytuacji początkowej Kinematyka - dział mechaniki zajmujący się badaniem geometrycznych właściwości ruchu ciał bez uwzględniania ich cech fizycznych (np. masy) i działających na nie sił. Dynamika - dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. (Statyka) Kinetyka - jest działem dynamiki, który określa prawa zachowania się ciał fizycznych, znajdujących się w ruchu pod wpływem niezrównoważonego układu sił. 31
31 Mechanika Zadanie proste Q Siły momenty ΣQ=ms" Opis ruchu s Przemieszczenia Zadanie odwrotne s Przemieszczenia d2 dt2 ms"=σq Opis ruchu Q Siły momenty 32
32 Mechanika przypomnienie Stopień swobody? 33
33 Mechanika przypomnienie Stopień swobody - w fizyce minimalna liczba niezależnych zmiennych opisujących jednoznacznie stan (modelu) układu fizycznego, w termodynamice liczba niezależnych zmiennych stanu, które można zmieniać nie powodując zmiany stanu (rodzaju i liczby faz). W praktyce stopień swobody określa liczba zmiennych układu, które można zmieniać, bez automatycznego powodowania zmian pozostałych zmiennych. 34
34 Mechanika przypomnienie Liczba stopni swobody w mechanice klasycznej: Liczba niezależnych ruchów, jakie ciało jest w stanie zrealizować w przestrzeni. Swobodne ciało sztywne ma... stopni swobody. 35
35 Mechanika przypomnienie Ciała odkształcalne mogą mieć większą liczbę stopni swobody. Model dyskretny: ciała o skończonej liczbie stopni swobody, Model ciągły: ciała o nieskończonej liczbie stopni swobody. Każdą trajektorię ciała materialnego można rozłożyć na sumę prostych ruchów wynikających z stopni swobody. 36
36 Mechanika przypomnienie Ciało materialne (np. człon mechanizmu) połączone z drugim traci pewną liczbę stopni swobody. - to ile stopni traci zależy od klasy połączenia Jeżeli układ składa się z dwóch ciał (podukładów) o odpowiednio n1 i n2 stopniach swobody, oraz między tymi ciałami występuje w więzów, to układ taki ma: n1+n2 - w stopni swobody. 37
37 Mechanika przypomnienie Przemieszczenie (displacement) 0 d = Δx x1 x2 38
38 Mechanika przypomnienie Odkształcenie (strain) 0 x 1 x 2 = x1 x1 x2 ΔL ϵ=lim L 0 L 39
39 Mechanika przypomnienie Naprężenie (stress) F 0 x1 x2 F s=lim A 0 A s= n s wektor naprężeń n wektor normalny do powierzchni A σ naprężenia normalne τ wektor naprężeń ścinających 40
40 Mechanika przypomnienie Prawo Hooke'a odkształcenie ciała pod wpływem działającej na nie siły jest wprost proporcjonalne do tej siły, ale... F x1 x2 0 σ=e ϵ σ E moduł Younga (moduł odkształcalności liniowej, moduł (współczynnik) sprężystości podłużnej) ϵ 41
41 Mechanika przypomnienie Przemieszczenie - pole wektorowe, przyporządkowujące każdemu punktowi ciała wektor przemieszczenia R 0 : P R 1 0 d = Δx x1 x2 R wektor położenia Ω zbiór punktów ciała P wszystkie punkty przestrzeni u = R 1 R 0 42
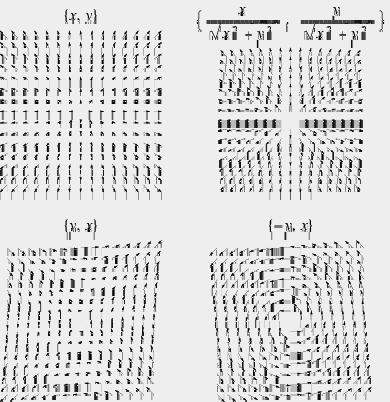
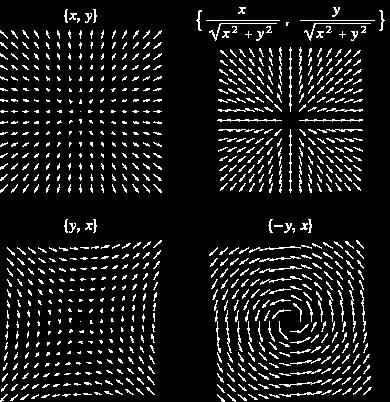
42 Mechanika przypomnienie Pole wektorowe 43

43 Mechanika przypomnienie Pole wektorowe 44
44 Mechanika przypomnienie Pole wektorowe przemieszczeń u = R 1 R 0 45
45 Mechanika przypomnienie Odkształcenia 47
46 Mechanika przypomnienie Odkształcenia -ε +ε 48
47 Mechanika przypomnienie Odkształcenia z z? x 49
48 Mechanika przypomnienie Odkształcenia z z +ε -ε x 50
49 Mechanika przypomnienie Odkształcenia z y? x 51
50 Mechanika przypomnienie Odkształcenia z y +γ -γ x 52
51 Mechanika przypomnienie Odkształcenia 3D 53
52 Mechanika przypomnienie Odkształcenia 3D σ τ τ σ 54

53 Mechanika przypomnienie Pole wektorowe przemieszczeń - definiuje również odkształcenia u = R 1 R 0 55
54 Mechanika przypomnienie Odkształcenia 3D u u =[u x, u y, u z ] δ ux ϵx= δx δuy ϵ y= δy δ uz ϵz = δz 56
55 Mechanika przypomnienie Odkształcenia 3D u u =[u x, u y, u z ] δ ux 0 δy 57
56 Mechanika przypomnienie Odkształcenia 3D u u =[u x, u y, u z ] σ ux σ uy γ xy= + σy σx σ ux σ u z γ xz = + σz σx σ u y σ uz γ yz = + σz σy 58
57 Mechanika przypomnienie Przemieszczenia 3D u u =[u x, u y, u z ] Odkształcenia 3D ϵ x, ϵ y, ϵ z, γ xy, γ xz, γ yz 59
58 Mechanika przypomnienie Przemieszczenia 3D u u =[u x, u y, u z ] Odkształcenia 3D - tensor odkształceń γ xy γ xz ϵx,, 2 2 γ xy γ yz, ϵy, 2 2 γ xz γ yz,, ϵz
59 Mechanika przypomnienie Odkształcenia γ xy γ xz ϵx,, 2 2 γ xy γ yz, ϵy, 2 2 γ xz γ yz,, ϵz 2 2 [ 61
60 Mechanika przypomnienie Odkształcenia γ xy γ xz ϵx,, 2 2 γ xy γ yz, ϵy, 2 2 γ xz γ yz,, ϵz 2 2 σ ux σ u y γ xy= + σy σx [ 62
61 Mechanika przypomnienie Odkształcenia γ xy γ xz ϵx,, 2 2 γ xy γ yz, ϵy, 2 2 γ xz γ yz,, ϵz 2 2 σ ux β σy Dla małych kątów β, gdy tgβ β [ 63
 ϵx ', 0, 0 0,ϵ y ', 0 0,0, ϵ z '")
62 Mechanika przypomnienie y' Odkształcenia główne (principal strain) ϵx ', 0, 0 0,ϵ y ', 0 0,0, ϵ z ' x' 64
 [ An introduction to biomechanics Harold M.")
63 Mechanika przypomnienie Odkształcenia główne (principal strain) [ An introduction to biomechanics Harold M. Frost, 1971] 65
64 Mechanika przypomnienie Naprężenia s= n - naprężenia dla danej powierzchni przekroju Uniezależniony od wybranego przekroju tensor naprężeń: σ x, τ xy, τ xz τ xy,σ y, τ yz τ xz, τ yz, σ z 66
65 Biomechanika Podstawowe pojęcia Biomechaniki Człon Półpara swobodna Para kinematyczna Ruchliwość pary kinematycznej Klasa pary kinematycznej Łańcuch kinematyczny Biomechanizm 67
66 Biomechanika Podstawowe pojęcia Biomechaniki Człon sztywny, nieodkształcalny element mechanizmu. 68

67 Biomechanika Podstawowe pojęcia Biomechaniki Człon Półpara swobodna człon przystosowany do połączenia z innym 69
68 Biomechanika Podstawowe pojęcia Biomechaniki Człon Półpara Para kinematyczna ruchome połączenie dwóch półpar swobodnych (członów) 70
69 Biomechanika Podstawowe pojęcia Biomechaniki Człon Półpara Para kinematyczna Ruchliwość pary kinematycznej liczba stopni swobody jednego z członów względem drugiego, unieruchomionego 71
70 Biomechanika Podstawowe pojęcia Biomechaniki Człon Półpara swobodna Para kinematyczna Ruchliwość pary kinematycznej Klasa pary kinematycznej liczba stopni swobody utraconych przez jeden z członów (względem drugiego) w wyniku połączenia. 72

71 Biomechanika 73
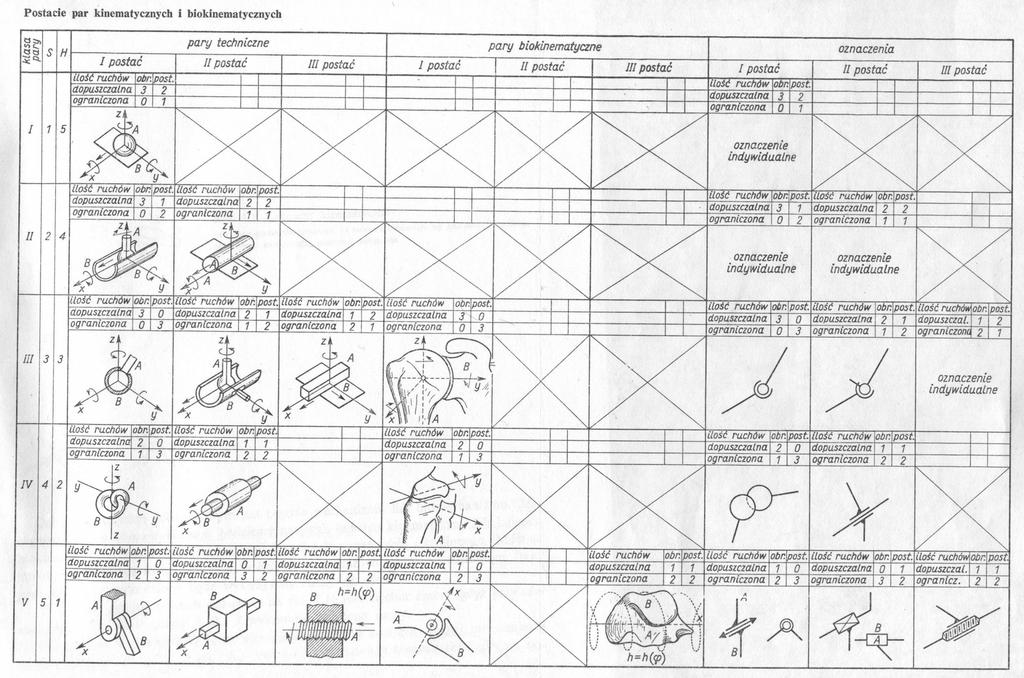
72 Biomechanika 74
73 Biomechanika Podstawowe pojęcia Biomechaniki Człon Półpara swobodna Para kinematyczna Ruchliwość pary kinematycznej Klasa pary kinematycznej Łańcuch kinematyczny spójna struktura zbudowana z członów połączonych w pary kinematyczne. (ł. biokinematyczny) 75
74 Biomechanika Podstawowe pojęcia Biomechaniki Człon Półpara swobodna Para kinematyczna Ruchliwość pary kinematycznej Klasa pary kinematycznej Łańcuch kinematyczny Biomechanizm łańcuch biokinematyczny zdolny do przekazania ruchu kinematycznie określonego. 76

75 Biomechanika Podstawowe pojęcia Biomechaniki Giovanni Alfonso Borelli, De Motu Animalium,
76 Biomechanika Podstawowe pojęcia Biomechaniki Ruchliwość łańcucha biokinematycznego: 5 W =6n P i i i=3 W ruchliwość łańcucha kinematycznego n liczba ruchomych członów (bez podstawy) i klasa pary kinematycznej Pi liczba par i-tej klasy. 78
77 Biomechanika Podstawowe pojęcia Biomechaniki Przykład: Jaka jest ruchliwość palca wskazującego przyjmując rękę jako nieruchomą podstawę? 79
78 Biomechanika Podstawowe pojęcia Biomechaniki Łańcuch kinematyczny otwarty: łańcuch o konfiguracji szeregowej, którego ogniwa nie tworzą struktur zamkniętych. Łańcuch kinematyczny zamknięty: Łańcuch w którym występują połączenia ruchów między wszystkimi członami, co oznacza, że brakuje w nim członu o wolnej końcówce 80
79 Biomechanika Podstawowe pojęcia Biomechaniki Łańcuch kinematyczny otwarty: 81

80 Biomechanika Podstawowe pojęcia Biomechaniki Łańcuch kinematyczny zamknięty: 82
81 Biomechanika Podstawowe pojęcia Biomechaniki Układ ruchu człowieka uznajemy za biomechanizm, ponieważ posiada człony sztywne (kości) oraz Morecki Bionika ruchu połączenia ruchome (stawy). 83
82 Biomechanika Podstawowe pojęcia Biomechaniki Schemat strukturalny biernego układu ruchu człowieka łańcuch biokinematyczny względem nieruchomej podstawy: czaszki. 144 człony ruchome 143 pary kinematyczne: 29 par III klasy (3 st. sw.) 33 pary IV klasy (2 st. sw.) 81 par V klasy (1 st. sw.) Morecki Bionika ruchu 84
83 Biomechanika Podstawowe pojęcia Biomechaniki 85

84 Biomechanika Podstawowe pojęcia Biomechaniki Stawy w układzie ruchu człowieka tworzą obrotowe pary kinematyczne, zatem ich ruchliwość może wynosić najwyżej trzy (stopnie swobody) 86
85 Biomechanika Podstawowe pojęcia Biomechaniki Schemat strukturalny kończyny górnej człowieka: 22 ruchome człony (wzgl. Łopatki) 22 pary kinematyczne: 1 para III klasy 6 par klasy IV 15 par klasy V Morecki Bionika ruchu 87
86 Biomechanika Podstawowe pojęcia Biomechaniki Morecki Bionika ruchu Jaka jest ruchliwość kończyny górnej człowieka? 88
87 Biomechanika Podstawowe pojęcia Biomechaniki Jaka jest ruchliwość kończyny górnej człowieka? 5 W =6n P i i 22 ruchome człony (wzgl. Łopatki) 22 pary kinematyczne: 1 para III klasy 6 par klasy IV 15 par klasy V Morecki Bionika ruchu i=3 89
88 Biomechanika Podstawowe pojęcia Biomechaniki Morecki Bionika ruchu Jaka jest ruchomość całego układu ruchu człowieka (względem czaszki)? 90
 33 pary IV klasy (2 st. sw.) 81 par V klasy (1 st. sw.) 5 W =6n P i i=6 144 3 29 4 33 5 81 =240 i =3 Morecki Bionika ruchu 91")
89 Biomechanika Podstawowe pojęcia Biomechaniki Jaka jest ruchomość całego układu ruchu człowieka (względem czaszki)? 144 człony ruchome 143 pary kinematyczne: 29 par III klasy (3 st. sw.) 33 pary IV klasy (2 st. sw.) 81 par V klasy (1 st. sw.) 5 W =6n P i i= =240 i =3 Morecki Bionika ruchu 91
90 Dynamika części ciała W stawach: obrotowy W wyniku ruchu innych członów biomechanizmu staw może wykonywać ruch: postępowy W efekcie: ruch dowolny 92
91 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Każdy ruch można przedstawić jako złożenie (superpozycję) ruchów prostych (postępowego i obrotowego). Względność ruchu ruch określamy względem wybranego układu odniesienia (innego ciała) 93
92 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Ruch postępowy =m a = m Δ v F Δt =m Δ v Δ t F Popęd siły = przyrost pędu - Twierdzenie o popędzie siły Ruch obrotowy =I ε = I Δ ω M Δt = I ω Δ t M Popęd momentu siły = przyrost momentu pędu - Twierdzenie o momencie pędu 94
93 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Ruch postępowy Zasada zachowania pędu Jeżeli w układzie ciał działają tylko siły wewnętrzne, to całkowity pęd układu pozostaje stały. Ruch obrotowy Zasada zachowania momentu pędu Jeżeli w układzie ciał działają tylko siły wewnętrzne, to całkowity moment pędu układu pozostaje stały. 95
94 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Ruch postępowy Zasada zachowania pędu =0 F =0 Δ t F 0=mk v k m p v p Ruch obrotowy Zasada zachowania momentu pędu =0 M =0 Δ t M k I p ω p 0= I k ω 96

95 Dynamika części ciała 97

96 Dynamika części ciała Ruch części ciała 98 D3 Rotating Falling Cat,
97 Dynamika części ciała 99 Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Ruch części ciała
98 Dynamika części ciała Moment bezwładności Jest wielkością charakteryzującą bezwładność ciał w ruchu obrotowym, względem ustalonej osi obrotu. Jest sumą iloczynów mas skupionych i kwadratów ich odległości od osi obrotu. k I Δ mi r i i=1 k 2 2 Δ mi r i Δ m 0 I = lim i i=1 100
99 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Moment bezwładności k I = Δ mi r i 2 i=1 101
100 Dynamika części ciała Zbliżanie ciała do osi obrotu spowoduje zmniejszanie się momentu bezwładności do chwili, gdy środek ciężkości znajdzie się w osi obrotu. Wtedy moment bezwładności przyjmuje wartość najmniejszą z możliwych. Centralny moment bezwładności ciała, jest to moment wyznaczony względem osi przechodzącej przez środek masy ciała. 102
101 Dynamika części ciała Twierdzenie o momencie bezwładności (Steinera) Moment bezwładności bryły A względem osi 0' jest równy sumie jego momentu centralnego Ic (względem osi 0 równoległej do 0') oraz iloczynu masy ciała i kwadratu odległości między tymi osiami. 103
102 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Twierdzenie o momencie bezwładności (Steinera) I 0 ' = I c +md 2 104
103 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Twierdzenie o momencie bezwładności (Steinera) Ic centralny moment bezwładności podudzia, względem osi poprzecznej; I0' moment bezwładności względem osi poprzecznej stawu kolanowego 0' oś poprzeczna stawu kolanowego 0 oś poprzeczna przez środek masy podudzia d odległość między osiami m masa podudzia I 0 ' = I c +md 2 105
104 Dynamika części ciała Moment bezwładności układu brył? 106
105 Dynamika części ciała Moment bezwładności układu brył Układ brył o momentach bezwładności wyznaczonych względem danej osi 0 równych IA, IB i IC posiada wypadkowy moment bezwładności równy sumie momentów bezwładności poszczególnych ciał, wyznaczonych względem tej samej osi
106 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Moment bezwładności układu brył I U =I A + I B + I C 0' 108
107 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Moment bezwładności układu brył I U =? 109
108 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Moment bezwładności układu brył I U = I A+ I B + I C 110
109 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Moment bezwładności układu brył I U = I A+ I B + I C I A =I ca +m A d A2 111
110 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Moment bezwładności układu brył I U = I A+ I B + I C I A =I ca +m A d A2 I B =I cb + mb d B 2 I C =I cc + mc d C 2 112
111 Dynamika części ciała Rodzaje osi obrotu Swobodne: przechodzące przez środek masy, spełniające warunek, że moment bezwładności względem nich jest najmniejszy lub największy. Ustalone: wszystkie inne (muszą zostać ustalone [na siłę] żeby obrót był możliwy) 113
112 Dynamika części ciała Rodzaje osi obrotu Osie swobodne: Stabilna oś dla której centralny moment bezwładności ma maksymalną wartość. Niestabilna - oś dla której centralny moment bezwładności ma minimalną wartość. 114
113 Dynamika części ciała Przykłady wartości momentów bezwładności człowieka Pozycja Oś obrotu Moment bezwładności [kgm2] Strzałkowa 12,0 15,0 Poprzeczna 10,5 13,0 Poprzeczna 4,0 5,0 Długa 1,0 1,2 Długa 2,0 2,5 115
114 Dynamika części ciała Jakiś z życia wzięty przykład na wykorzystanie momentu pędu
115 Dynamika części ciała 117

116 Dynamika części ciała 2V y tl = g Maksymalizacja momentu pędu Iω i prędkości pionowej Vy 118
117 Dynamika części ciała Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki,
118 Dynamika części ciała P=Q+ F i=m g+m a Przesunięcie P wzgl. R moment + moment ruchu ramion Przesunięcie Fix wzgl. R moment Biomechanika Inżynierska+ moment ruchu ramion 120
119 Dynamika części ciała Inne przykłady zastosowania w praktyce zasady zachowania momentu pędu pokazujące jak zamiana momenty bezwładności pozwala modyfikować prędkość obrotową:
120 Modele ciała człowieka Modele ciała człowieka Model system założeń, pojęć i zależności między nimi, pozwalający opisać (modelować) w przybliżony sposób jakiś aspekt rzeczywistości. Żeby stworzyć model trzeba przyjąć jakieś założenia uprościć rzeczywistość tak, aby dało się ją opisać. 122
121 Modele ciała człowieka Modele ciała człowieka Model Należy stosować najprostszy możliwy model pozwalający rozwiązać postawiony problem. 123
122 Modele ciała człowieka Modele ciała człowieka Założenia: Ciało człowieka jest układem brył sztywnych członów. Człony połączone są stawami, w których wykonywane są tylko ruchy obrotowe. Możliwe jest wyznaczenie parametrów bezwładnościowych poszczególnych członów. Powyższe parametry traktuje się jako względnie stałe. 124
123 Modele ciała człowieka Modele ciała człowieka Modele tworzy się zależnie od potrzeb rodzaju analizowanego ruchu. Chodu Biegu Czynności codziennych Pływania itp. itd
124 Modele ciała człowieka Modele: 126
125 Modele ciała człowieka Modele:

126 Modele ciała człowieka Gait analysis", Michael W. Whittle, 2007 Chodu 128
127 Modele ciała człowieka Biomechanika układu ruchu człowieka", T. Bober, J. Zawadzki, 2003 Jaki model byłby potrzebny w takim przypadku? 129
128 Modele ciała człowieka Jaki model byłby potrzebny w takim przypadku? 130
129 Modele ciała człowieka 14 Segment Początek Koniec Głowa (wraz z szyją) Szczyt głowy (vertex) Wcięcie jarzmowe mostka (suprasternale) Tułów Wcięcie jarzmowe mostka Spojenie łonowe (symphysion) Ramię (x 2) Oś stawu ramiennego: 2,5cm poniżej wyrostka barkowego Oś stawu łokciowego; linia przesunięta o 1 cm w dół od linii łączącej nadkłykcie kości ramiennej (radiale) Przedramię (x 2) Oś stawu łokciowego Oś stawu promieniowo-nadgarstkowego; punkt w połowie odcinka łączącego wyrostki rylcowate kości łokciowej i promieniowej Ręka (x 2) Oś stawu promieniowonadgarstkowego Koniec palca III (dactylion) Udo (x 2) Oś stawu biodrowego (dla ruchu w płaszczyźnie strzałkowej); punkt przesunięty ok. 1 cm do przodu od wierzchołka krętarza większego Oś stawu kolanowego; 2,5 cm powyżej szczeliny stawu kolanowego na granicy środkowej i tylnej części wymiaru strzałkowego kolana dzieląc go na trzy części Podudzie (x 2) Oś stawu kolanowego Oś stawu skokowo-goleniowego; około 0,8 cm powyżej szczytu kostki bocznej Stopa (x 2) Guz piętowy Palec I lub palec II (acropodion) 131
Biomechanika Inżynierska
 wykład 1 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Sprawy organizacyjne Wykład: Wykład i laboratorium: Dr inż. Szymon Cygan pok. 40 tel. 22-234-86-64 e-mail: s.cygan@mchtr.pw.edu.pl
wykład 1 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Sprawy organizacyjne Wykład: Wykład i laboratorium: Dr inż. Szymon Cygan pok. 40 tel. 22-234-86-64 e-mail: s.cygan@mchtr.pw.edu.pl
Biomechanika Inżynierska
 wykład 1 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Sprawy organizacyjne Kontakt: Wykład: dr inż. Szymon Cygan dr inż. Kazimierz Pęczalski Laboratorium: dr inż. Kazimierz Pęczalski
wykład 1 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Sprawy organizacyjne Kontakt: Wykład: dr inż. Szymon Cygan dr inż. Kazimierz Pęczalski Laboratorium: dr inż. Kazimierz Pęczalski
Biomechanika Inżynierska
 wykład 2 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Biomechanika Podstawowe pojęcia Biomechaniki Ruchliwość łańcucha biokinematycznego: 5 W =6n P i i i=3 W ruchliwość łańcucha
wykład 2 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Biomechanika Podstawowe pojęcia Biomechaniki Ruchliwość łańcucha biokinematycznego: 5 W =6n P i i i=3 W ruchliwość łańcucha
KINEMATYKA POŁĄCZEŃ STAWOWYCH
 KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
Biomechanika Inżynierska
 wykład 2 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Dynamika części ciała W stawach: obrotowy W wyniku ruchu innych członów biomechanizmu staw może wykonywać ruch: postępowy
wykład 2 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Dynamika części ciała W stawach: obrotowy W wyniku ruchu innych członów biomechanizmu staw może wykonywać ruch: postępowy
 Wydawnictwo
Wydawnictwo PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE.
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, ćwiczenia, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE.
S YL AB US MODUŁ U ( PRZEDMIOTU) I nforma cje ogólne. Biomechanika z elementami ergonomii. Pierwszy
 I nforma cje ogólne. Biomechanika z elementami ergonomii. Pierwszy") YL AB U MODUŁ U ( PRZDMIOTU) I nforma cje ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów pecjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika z elementami ergonomii
YL AB U MODUŁ U ( PRZDMIOTU) I nforma cje ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów pecjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika z elementami ergonomii
Katedra Mechaniki i Mechatroniki Inżynieria mechaniczno-medyczna. Obszary kształcenia
 Nazwa przedmiotu Kod przedmiotu Jednostka Kierunek Obszary kształcenia BIOMECHANIKA INŻYNIERSKA I M:03516W0 Katedra Mechaniki i Mechatroniki Inżynieria mechaniczno-medyczna nauki medyczne i nauki o zdrowiu
Nazwa przedmiotu Kod przedmiotu Jednostka Kierunek Obszary kształcenia BIOMECHANIKA INŻYNIERSKA I M:03516W0 Katedra Mechaniki i Mechatroniki Inżynieria mechaniczno-medyczna nauki medyczne i nauki o zdrowiu
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna Kod przedmiotu/ modułu* Wydział (nazwa jednostki
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna Kod przedmiotu/ modułu* Wydział (nazwa jednostki
Biomechanika Inżynierska
 Biomechanika Inżynierska wykład 4 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska Biomechanika Inżynierska 1 Modele ciała człowieka Modele: 4 6 10 14 Biomechanika Inżynierska 2 Modele
Biomechanika Inżynierska wykład 4 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska Biomechanika Inżynierska 1 Modele ciała człowieka Modele: 4 6 10 14 Biomechanika Inżynierska 2 Modele
Biomechanika. dr n.med. Robert Santorek 2 ECTS F-1-P-B-18 studia
 Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące:
Nazwa jednostki prowadzącej kierunek: Nazwa kierunku: Poziom kształcenia: Profil kształcenia: Moduły wprowadzające / wymagania wstępne: Nazwa modułu (przedmiot lub grupa przedmiotów): Osoby prowadzące:
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia
 modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia") Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Modelowanie biomechaniczne. Dr inż. Sylwia Sobieszczyk Politechnika Gdańska Wydział Mechaniczny KMiWM 2005/2006
 Modelowanie biomechaniczne Dr inż. Sylwia Sobieszczyk Politechnika Gdańska Wydział Mechaniczny KMiWM 2005/2006 Zakres: Definicja modelowania Modele kinematyczne ruch postępowy, obrotowy, przemieszczenie,
Modelowanie biomechaniczne Dr inż. Sylwia Sobieszczyk Politechnika Gdańska Wydział Mechaniczny KMiWM 2005/2006 Zakres: Definicja modelowania Modele kinematyczne ruch postępowy, obrotowy, przemieszczenie,
Mechanika teoretyczna
 Przedmiot Mechanika teoretyczna Wykład nr 1 Wprowadzenie i podstawowe pojęcia. Rachunek wektorowy. Wypadkowa układu sił. Mechanika: ogólna, techniczna, teoretyczna. Dział fizyki zajmujący się badaniem
Przedmiot Mechanika teoretyczna Wykład nr 1 Wprowadzenie i podstawowe pojęcia. Rachunek wektorowy. Wypadkowa układu sił. Mechanika: ogólna, techniczna, teoretyczna. Dział fizyki zajmujący się badaniem
BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA
 Praca zbiorowa pod redakcją Dagmary Tejszerskiej, Eugeniusza Świtońskiego, Marka Gzika BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA BIOMECHANIKA narządu ruchu człowieka Praca zbiorowa pod redakcją: Dagmary Tejszerskiej
Praca zbiorowa pod redakcją Dagmary Tejszerskiej, Eugeniusza Świtońskiego, Marka Gzika BIOMECHANIKA NARZĄDU RUCHU CZŁOWIEKA BIOMECHANIKA narządu ruchu człowieka Praca zbiorowa pod redakcją: Dagmary Tejszerskiej
Krakowska Akademia im. Andrzeja Frycza Modrzewskiego. Karta przedmiotu. obowiązuje studentów, którzy rozpoczęli studia w roku akademickim 2015/2016
 Krakowska Akademia im. Andrzeja Frycza Modrzewskiego Karta przedmiotu Wydział Zdrowia i Nauk Medycznych obowiązuje studentów, którzy rozpoczęli studia w roku akademickim 015/016 Kierunek studiów: Fizjoterapia
Krakowska Akademia im. Andrzeja Frycza Modrzewskiego Karta przedmiotu Wydział Zdrowia i Nauk Medycznych obowiązuje studentów, którzy rozpoczęli studia w roku akademickim 015/016 Kierunek studiów: Fizjoterapia
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2013/2014
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2013/2014 Kierunek studiów: Inżynieria Biomedyczna Forma
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2013/2014 Kierunek studiów: Inżynieria Biomedyczna Forma
Biomechanika ruchu - metody pomiarowe Kod przedmiotu
 Biomechanika ruchu - metody pomiarowe - opis przedmiotu Informacje ogólne Nazwa przedmiotu Biomechanika ruchu - metody pomiarowe Kod przedmiotu 16.1-WL-WF-BR-MP Wydział Wydział Lekarski i Nauk o Zdrowiu
Biomechanika ruchu - metody pomiarowe - opis przedmiotu Informacje ogólne Nazwa przedmiotu Biomechanika ruchu - metody pomiarowe Kod przedmiotu 16.1-WL-WF-BR-MP Wydział Wydział Lekarski i Nauk o Zdrowiu
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
KARTA PRZEDMIOTU. 1. NAZWA PRZEDMIOTU: Mechanika. 2. KIERUNEK: Mechanika i Budowa Maszyn. 3. POZIOM STUDIÓW: Studia pierwszego stopnia
 KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU: Mechanika. KIERUNEK: Mechanika i Budowa Maszyn 3. POZIOM STUDIÓW: Studia pierwszego stopnia 4. ROK/ SEMESTR STUDIÓW: rok studiów I/ semestr 5. LICZBA PUNKTÓW ECTS:
KARTA PRZEDMIOTU 1. NAZWA PRZEDMIOTU: Mechanika. KIERUNEK: Mechanika i Budowa Maszyn 3. POZIOM STUDIÓW: Studia pierwszego stopnia 4. ROK/ SEMESTR STUDIÓW: rok studiów I/ semestr 5. LICZBA PUNKTÓW ECTS:
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Sylabus przedmiotu. Fizjoterapia Studia I stopnia Profil praktyczny Studia stacjonarne. Biomechanika. Prof.dr hab.med. Jacek Przybylski.
 Sylabus przedmiotu 1. Metryczka Nazwa Wydziału: Program kształcenia (kierunek studiów, poziom i profil kształcenia, forma studiów, np. Zdrowie publiczne I stopnia profil praktyczny, studia stacjonarne):
Sylabus przedmiotu 1. Metryczka Nazwa Wydziału: Program kształcenia (kierunek studiów, poziom i profil kształcenia, forma studiów, np. Zdrowie publiczne I stopnia profil praktyczny, studia stacjonarne):
VII.1 Pojęcia podstawowe.
 II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
I nforma c j e ogólne. Biomechanika. Nie dotyczy. Pierwszy. Wykłady - 30 godz., Ćwiczenia 20 godz. Dr hab. n. zdr. Anna Lubkowska
 S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika Obowiązkowy Wydział
S YL AB US MODUŁ U (PRZDMIOTU) I nforma c j e ogólne Kod modułu Rodzaj modułu Wydział PUM Kierunek studiów Specjalność Poziom studiów Forma studiów Rok studiów Nazwa modułu Biomechanika Obowiązkowy Wydział
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty) Biomechanika kliniczna i ergonomia pracy
 Biomechanika kliniczna i ergonomia pracy") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2015-2018 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna i ergonomia pracy Kod przedmiotu/ modułu* Wydział
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2015-2018 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna i ergonomia pracy Kod przedmiotu/ modułu* Wydział
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2017-2022 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika stosowana i biomechanika kliniczna Kod przedmiotu/ modułu*
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2017-2022 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika stosowana i biomechanika kliniczna Kod przedmiotu/ modułu*
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł specjalności inżynieria rehabilitacyjna Rodzaj zajęć: wykład, seminarium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł specjalności inżynieria rehabilitacyjna Rodzaj zajęć: wykład, seminarium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
PF11- Dynamika bryły sztywnej.
 Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia
 modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia") Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia Przedmiot: Mechanika analityczna Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: MBM 2 S 0 1 02-0_1 Rok: 1 Semestr: 1
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia drugiego stopnia Przedmiot: Mechanika analityczna Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: MBM 2 S 0 1 02-0_1 Rok: 1 Semestr: 1
Podkowiańska Wyższa Szkoła Medyczna im. Z. i J. Łyko Syllabus przedmiotowy 2017/ /2022 r.
 Podkowiańska Wyższa Szkoła Medyczna im. Z. i J. Łyko Syllabus przedmiotowy 2017/18-2021/2022 r. Wydział Fizjoterapii Kierunek studiów Fizjoterapia Specjalność ----------- Forma studiów Stacjonarne Stopień
Podkowiańska Wyższa Szkoła Medyczna im. Z. i J. Łyko Syllabus przedmiotowy 2017/18-2021/2022 r. Wydział Fizjoterapii Kierunek studiów Fizjoterapia Specjalność ----------- Forma studiów Stacjonarne Stopień
Zasady i kryteria zaliczenia: Zaliczenie pisemne w formie pytań opisowych, testowych i rachunkowych.
 Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Mechanika techniczna i wytrzymałość materiałów Rok akademicki: 2012/2013 Kod: STC-1-105-s Punkty ECTS: 3 Wydział: Energetyki i Paliw Kierunek: Technologia Chemiczna Specjalność: Poziom studiów:
Nazwa modułu: Mechanika techniczna i wytrzymałość materiałów Rok akademicki: 2012/2013 Kod: STC-1-105-s Punkty ECTS: 3 Wydział: Energetyki i Paliw Kierunek: Technologia Chemiczna Specjalność: Poziom studiów:
Biomechanika Inżynierska
 wykład 2 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Modele ciała człowieka Model podstawowy 14-elementowy: Co jest potrzebne, żeby opisać jego ruch? 2 Modele ciała człowieka
wykład 2 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska 1 Modele ciała człowieka Model podstawowy 14-elementowy: Co jest potrzebne, żeby opisać jego ruch? 2 Modele ciała człowieka
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika i ergonomia pracy Kod przedmiotu/ modułu* Wydział (nazwa
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016-2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika i ergonomia pracy Kod przedmiotu/ modułu* Wydział (nazwa
Defi f nicja n aprę r żeń
 Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
SYLAB US MODU ŁU ( PR ZE DM IOTU) In fo rma cje og ó lne
 In fo rma cje og ó lne") YLAB U MODU ŁU ( PR Z DM IOTU) In fo rma cje og ó lne Nazwa modułu: Biomechanika z elementami ergonomii Rodzaj modułu Wydział PUM Kierunek studiów pecjalność Poziom studiów Forma studiów Rok studiów, semestr
YLAB U MODU ŁU ( PR Z DM IOTU) In fo rma cje og ó lne Nazwa modułu: Biomechanika z elementami ergonomii Rodzaj modułu Wydział PUM Kierunek studiów pecjalność Poziom studiów Forma studiów Rok studiów, semestr
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej
 Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Materiały pomocnicze 5 do zajęć wyrównawczych z Fizyki dla Inżynierii i Gospodarki Wodnej 1. Wielkości dynamiczne w ruchu postępowym. a. Masa ciała jest: - wielkością skalarną, której wielkość jest niezmienna
Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia. Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu:
 przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia. Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu:") Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia Przedmiot: Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MT 1 S 0 2 14-0_1 Rok: I Semestr: II Forma
Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia Przedmiot: Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MT 1 S 0 2 14-0_1 Rok: I Semestr: II Forma
Bryła sztywna. Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka
 Wykład XXIII: Przypomnienie: statyka") Bryła sztywna Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka Moment bezwładności Prawa ruchu Energia ruchu obrotowego Porównanie ruchu obrotowego z ruchem postępowym Przypomnienie Równowaga bryły
Bryła sztywna Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka Moment bezwładności Prawa ruchu Energia ruchu obrotowego Porównanie ruchu obrotowego z ruchem postępowym Przypomnienie Równowaga bryły
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Mechanika i Wytrzymałość Materiałów. Wykład nr 1 Wprowadzenie i podstawowe pojęcia. Rachunek wektorowy. Wypadkowa układu sił. Równowaga.
 Mechanika i Wytrzymałość Materiałów Wykład nr 1 Wprowadzenie i podstawowe pojęcia. Rachunek wektorowy. Wypadkowa układu sił. Równowaga. Przedmiot Mechanika (ogólna, techniczna, teoretyczna): Dział fizyki
Mechanika i Wytrzymałość Materiałów Wykład nr 1 Wprowadzenie i podstawowe pojęcia. Rachunek wektorowy. Wypadkowa układu sił. Równowaga. Przedmiot Mechanika (ogólna, techniczna, teoretyczna): Dział fizyki
MODEL MATEMATYCZNY DO ANALIZY CHODU DZIECKA NIEPEŁNOSPRAWNEGO*'
 Aktualne Problemy Biomechaniki, nr 1/2007 15 Agnieszka GŁOWACKA, Koło Naukowe Biomechaniki przy Katedrze Mechaniki Stosowanej, Politechnika Śląska, Gliwice MODEL MATEMATYCZNY DO ANALIZY CHODU DZIECKA NIEPEŁNOSPRAWNEGO*'
Aktualne Problemy Biomechaniki, nr 1/2007 15 Agnieszka GŁOWACKA, Koło Naukowe Biomechaniki przy Katedrze Mechaniki Stosowanej, Politechnika Śląska, Gliwice MODEL MATEMATYCZNY DO ANALIZY CHODU DZIECKA NIEPEŁNOSPRAWNEGO*'
Mechanika i wytrzymałość materiałów Kod przedmiotu
 Mechanika i wytrzymałość materiałów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Mechanika i wytrzymałość materiałów Kod przedmiotu 06.9-WM-IB-P-22_15W_pNadGenRDG4C Wydział Kierunek Wydział Mechaniczny
Mechanika i wytrzymałość materiałów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Mechanika i wytrzymałość materiałów Kod przedmiotu 06.9-WM-IB-P-22_15W_pNadGenRDG4C Wydział Kierunek Wydział Mechaniczny
Podstawy Procesów i Konstrukcji Inżynierskich. Dynamika
 Podstawy Procesów i Konstrukcji Inżynierskich Dynamika Prowadzący: Kierunek Wyróżniony przez PKA Mechanika klasyczna Mechanika klasyczna to dział mechaniki w fizyce opisujący : - ruch ciał - kinematyka,
Podstawy Procesów i Konstrukcji Inżynierskich Dynamika Prowadzący: Kierunek Wyróżniony przez PKA Mechanika klasyczna Mechanika klasyczna to dział mechaniki w fizyce opisujący : - ruch ciał - kinematyka,
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE
 PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
PODSTAWY STATYKI BUDOWLI POJĘCIA PODSTAWOWE Podstawy statyki budowli: Pojęcia podstawowe Model matematyczny, w odniesieniu do konstrukcji budowlanej, opisuje ją za pomocą zmiennych. Wartości zmiennych
PL B1. Mechanizm z dostosowaniem trajektorii w czasie rzeczywistym, zwłaszcza ortezy kolana ludzkiego. POLITECHNIKA WROCŁAWSKA, Wrocław, PL
 PL 228031 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228031 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419888 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl.
PL 228031 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228031 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419888 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl.
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawowe pojęcia wytrzymałości materiałów. Statyczna próba rozciągania metali. Warunek nośności i użytkowania. Założenia
 Wytrzymałość materiałów dział mechaniki obejmujący badania teoretyczne i doświadczalne procesów odkształceń i niszczenia ciał pod wpływem różnego rodzaju oddziaływań (obciążeń) Podstawowe pojęcia wytrzymałości
Wytrzymałość materiałów dział mechaniki obejmujący badania teoretyczne i doświadczalne procesów odkształceń i niszczenia ciał pod wpływem różnego rodzaju oddziaływań (obciążeń) Podstawowe pojęcia wytrzymałości
ANATOMIA. mgr Małgorzata Wiśniewska Łowigus
 ANATOMIA mgr Małgorzata Wiśniewska Łowigus Wśród nauk biologicznych, zajmujących się wszelkimi formami życia, wyróżnia się dwa podstawowe działy: morfologię, fizjologię. MORFOLOGIA - zajmuje się poznaniem
ANATOMIA mgr Małgorzata Wiśniewska Łowigus Wśród nauk biologicznych, zajmujących się wszelkimi formami życia, wyróżnia się dwa podstawowe działy: morfologię, fizjologię. MORFOLOGIA - zajmuje się poznaniem
Ogłoszenie. Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz
 Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
KARTA MODUŁU KSZTAŁCENIA
 KARTA MODUŁU KSZTAŁCENIA I. 1 Nazwa modułu kształcenia Mechanika teoretyczna Informacje ogólne 2 Nazwa jednostki prowadzącej moduł Państwowa Szkoła Wyższa im. Papieża Jana Pawła II,Katedra Nauk Technicznych,
KARTA MODUŁU KSZTAŁCENIA I. 1 Nazwa modułu kształcenia Mechanika teoretyczna Informacje ogólne 2 Nazwa jednostki prowadzącej moduł Państwowa Szkoła Wyższa im. Papieża Jana Pawła II,Katedra Nauk Technicznych,
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Przedmiot: BIOMECHANIKA
 Przedmiot: BIOMECHANIKA I. Informacje ogólne Jednostka organizacyjna Nazwa przedmiotu Kod przedmiotu Język wykładowy Rodzaj przedmiotu kształcenia (obowiązkowy/fakultatywny) Poziom (np. pierwszego lub
Przedmiot: BIOMECHANIKA I. Informacje ogólne Jednostka organizacyjna Nazwa przedmiotu Kod przedmiotu Język wykładowy Rodzaj przedmiotu kształcenia (obowiązkowy/fakultatywny) Poziom (np. pierwszego lub
FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego)
") 2019-09-01 FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego) Treści z podstawy programowej przedmiotu POZIOM ROZSZERZONY (PR) SZKOŁY BENEDYKTA Podstawa programowa FIZYKA KLASA 1 LO (4-letnie po szkole
2019-09-01 FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego) Treści z podstawy programowej przedmiotu POZIOM ROZSZERZONY (PR) SZKOŁY BENEDYKTA Podstawa programowa FIZYKA KLASA 1 LO (4-letnie po szkole
Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie
 obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie") Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie Rozciąganie lub ściskanie Zginanie Skręcanie Ścinanie 1. Pręt rozciągany lub ściskany
Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie Rozciąganie lub ściskanie Zginanie Skręcanie Ścinanie 1. Pręt rozciągany lub ściskany
Inżynieria rehabilitacji - opis przedmiotu
 Inżynieria rehabilitacji - opis przedmiotu Informacje ogólne Nazwa przedmiotu Inżynieria rehabilitacji Kod przedmiotu 06.9-WM-IB-P-57_15gen Wydział Kierunek Wydział Mechaniczny Inżynieria biomedyczna Profil
Inżynieria rehabilitacji - opis przedmiotu Informacje ogólne Nazwa przedmiotu Inżynieria rehabilitacji Kod przedmiotu 06.9-WM-IB-P-57_15gen Wydział Kierunek Wydział Mechaniczny Inżynieria biomedyczna Profil
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
SYLABUS. DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty) Biomechanika kliniczna i ergonomia pracy
 Biomechanika kliniczna i ergonomia pracy") SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2015-2018 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna i ergonomia pracy Kod przedmiotu/ modułu* Wydział
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2015-2018 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika kliniczna i ergonomia pracy Kod przedmiotu/ modułu* Wydział
ANALIZA KINEMATYCZNA PALCÓW RĘKI
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł specjalności inżynieria rehabilitacyjna Rodzaj zajęć: wykład, seminarium PODSTAWY ORTOPEDII KLINICZNEJ Clinical Orthopedics
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł specjalności inżynieria rehabilitacyjna Rodzaj zajęć: wykład, seminarium PODSTAWY ORTOPEDII KLINICZNEJ Clinical Orthopedics
Ruch obrotowy bryły sztywnej. Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe
 Ruch obrotowy bryły sztywnej Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe Ruch obrotowy ruch po okręgu P, t 1 P 1, t 1 θ 1 θ Ruch obrotowy ruch po okręgu P,
Ruch obrotowy bryły sztywnej Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe Ruch obrotowy ruch po okręgu P, t 1 P 1, t 1 θ 1 θ Ruch obrotowy ruch po okręgu P,
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 26/17
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229343 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419886 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl. A61F 2/38 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229343 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 419886 (22) Data zgłoszenia: 20.12.2016 (51) Int.Cl. A61F 2/38 (2006.01)
DRGANIA ELEMENTÓW KONSTRUKCJI
 DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Wprowadzenie do WK1 Stan naprężenia
 Wytrzymałość materiałów i konstrukcji 1 Wykład 1 Wprowadzenie do WK1 Stan naprężenia Płaski stan naprężenia Dr inż. Piotr Marek Wytrzymałość Konstrukcji (Wytrzymałość materiałów, Mechanika konstrukcji)
Wytrzymałość materiałów i konstrukcji 1 Wykład 1 Wprowadzenie do WK1 Stan naprężenia Płaski stan naprężenia Dr inż. Piotr Marek Wytrzymałość Konstrukcji (Wytrzymałość materiałów, Mechanika konstrukcji)
MECHANIKA PRĘTÓW CIENKOŚCIENNYCH
 dr inż. Robert Szmit Przedmiot: MECHANIKA PRĘTÓW CIENKOŚCIENNYCH WYKŁAD nr Uniwersytet Warmińsko-Mazurski w Olsztynie Katedra Geotechniki i Mechaniki Budowli Opis stanu odkształcenia i naprężenia powłoki
dr inż. Robert Szmit Przedmiot: MECHANIKA PRĘTÓW CIENKOŚCIENNYCH WYKŁAD nr Uniwersytet Warmińsko-Mazurski w Olsztynie Katedra Geotechniki i Mechaniki Budowli Opis stanu odkształcenia i naprężenia powłoki
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł specjalności inżynieria rehabilitacyjna Rodzaj zajęć: wykład, laboratorium URZĄDZENIA I SPRZĘT REHABILITACYJNY Facilities
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł specjalności inżynieria rehabilitacyjna Rodzaj zajęć: wykład, laboratorium URZĄDZENIA I SPRZĘT REHABILITACYJNY Facilities
Biomechanika kliniczna
 Dariusz Wiesław B Jaszczyk Biomechanika kliniczna podręcznik d la studentów m edycyny i fizjoterapii Dr hab. n. biol. Janusz Wiesław B łas lc Zyk liomechanika kliniczna podręcznik dla studentów m edycyny
Dariusz Wiesław B Jaszczyk Biomechanika kliniczna podręcznik d la studentów m edycyny i fizjoterapii Dr hab. n. biol. Janusz Wiesław B łas lc Zyk liomechanika kliniczna podręcznik dla studentów m edycyny
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: Kierunkowy ogólny Rodzaj zajęć: Wykład, ćwiczenia MECHANIKA Mechanics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba godzin/tydzień:
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: Kierunkowy ogólny Rodzaj zajęć: Wykład, ćwiczenia MECHANIKA Mechanics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba godzin/tydzień:
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!)
") Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA W KONINIE WYDZIAŁ KULTURY FIZYCZNEJ I OCHRONY ZDROWIA. Katedra Fizjoterapii i Nauk o Zdrowiu. Kierunek: Fizjoterapia
 PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA W KONINIE WYDZIAŁ KULTURY FIZYCZNEJ I OCHRONY ZDROWIA Katedra Fizjoterapii i Nauk o Zdrowiu Kierunek: Fizjoterapia SYLABUS Nazwa przedmiotu biomechanika Kod przedmiotu
PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA W KONINIE WYDZIAŁ KULTURY FIZYCZNEJ I OCHRONY ZDROWIA Katedra Fizjoterapii i Nauk o Zdrowiu Kierunek: Fizjoterapia SYLABUS Nazwa przedmiotu biomechanika Kod przedmiotu
Wewnętrzny stan bryły
 Stany graniczne Wewnętrzny stan bryły Bryła (konstrukcja) jest w równowadze, jeżeli oddziaływania zewnętrzne i reakcje się równoważą. P α q P P Jednak drugim warunkiem równowagi jest przeniesienie przez
Stany graniczne Wewnętrzny stan bryły Bryła (konstrukcja) jest w równowadze, jeżeli oddziaływania zewnętrzne i reakcje się równoważą. P α q P P Jednak drugim warunkiem równowagi jest przeniesienie przez
ANALIZA WYTRZYMAŁOŚCIOWA KOŚCI PISZCZELOWEJ
 POLITECHNIKA POZNAŃSKA WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Łukomska Patrycja Topól Marzena Woś Magdalena Inżynieria biomedyczna 2016/2017 ANALIZA WYTRZYMAŁOŚCIOWA KOŚCI PISZCZELOWEJ Modelowanie i symulacja
POLITECHNIKA POZNAŃSKA WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Łukomska Patrycja Topól Marzena Woś Magdalena Inżynieria biomedyczna 2016/2017 ANALIZA WYTRZYMAŁOŚCIOWA KOŚCI PISZCZELOWEJ Modelowanie i symulacja
Biegi krótkie: technika, trening: nowe spojrzenie- perspektywy i problemy
 Akademia Wychowania Fizycznego we Wrocławiu Wydział Wychowania Fizycznego Biegi krótkie: technika, trening: nowe spojrzenie- perspektywy i problemy Dr hab. Krzysztof Maćkała AWF Wrocław 2 Wprowadzenie
Akademia Wychowania Fizycznego we Wrocławiu Wydział Wychowania Fizycznego Biegi krótkie: technika, trening: nowe spojrzenie- perspektywy i problemy Dr hab. Krzysztof Maćkała AWF Wrocław 2 Wprowadzenie
Egzamin / zaliczenie na ocenę*
 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI Zał. nr 4 do ZW /01 KARTA PRZEDMIOTU Nazwa w języku polskim : IMPLANTY I SZTUCZNE NARZĄDY Nazwa w języku angielskim: IMPLANTS AND ARTIFICIAL ORGANS Kierunek studiów
WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI Zał. nr 4 do ZW /01 KARTA PRZEDMIOTU Nazwa w języku polskim : IMPLANTY I SZTUCZNE NARZĄDY Nazwa w języku angielskim: IMPLANTS AND ARTIFICIAL ORGANS Kierunek studiów
Sylabus przedmiotowy 2016/ /2019
 Wykład Ćwiczenia Konwersatorium Lektorat Seminarium 15 30 - - - Sylabus przedmiotowy 016/017-018/019 Wydział Fizjoterapii Kierunek studiów Fizjoterapia Specjalność ----------- Forma studiów Stacjonarne
Wykład Ćwiczenia Konwersatorium Lektorat Seminarium 15 30 - - - Sylabus przedmiotowy 016/017-018/019 Wydział Fizjoterapii Kierunek studiów Fizjoterapia Specjalność ----------- Forma studiów Stacjonarne
Wytrzymałość Materiałów
 Wytrzymałość Materiałów Rozciąganie/ ściskanie prętów prostych Naprężenia i odkształcenia, statyczna próba rozciągania i ściskania, właściwości mechaniczne, projektowanie elementów obciążonych osiowo.
Wytrzymałość Materiałów Rozciąganie/ ściskanie prętów prostych Naprężenia i odkształcenia, statyczna próba rozciągania i ściskania, właściwości mechaniczne, projektowanie elementów obciążonych osiowo.
1. PODSTAWY TEORETYCZNE
 1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
SYLABUS DOTYCZY CYKLU KSZTAŁCENIA (skrajne daty)
") Załącznik nr 4 do Uchwały Senatu nr 430/01/2015 SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016 2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika Kod przedmiotu/
Załącznik nr 4 do Uchwały Senatu nr 430/01/2015 SYLABUS DOTYCZY CYKLU KSZTAŁCENIA 2016 2019 (skrajne daty) 1.1. PODSTAWOWE INFORMACJE O PRZEDMIOCIE/MODULE Nazwa przedmiotu/ modułu Biomechanika Kod przedmiotu/
INSTRUKCJA DO ĆWICZENIA NR 19
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 19 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA TECHNICZNA ALIZA PŁASKIEGO DOWOLNEGO UKŁADU SIŁ NA PODSTAWIE OBCIĄŻENIA
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 19 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA TECHNICZNA ALIZA PŁASKIEGO DOWOLNEGO UKŁADU SIŁ NA PODSTAWIE OBCIĄŻENIA
Rys. 1Stanowisko pomiarowe
 ĆWICZENIE WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA Wykaz przyrządów: Stojak z metalową pryzmą do zawieszania badanych ciał Tarcza
ĆWICZENIE WYZNACZANIE MOMENTU BEZWŁADNOŚCI CIAŁ METODĄ WAHADŁA FIZYCZNEGO GRAWITACYJNEGO I SPRAWDZANIE TWIERDZENIA STEINERA Wykaz przyrządów: Stojak z metalową pryzmą do zawieszania badanych ciał Tarcza
Wytrzymałość Materiałów
 Wytrzymałość Materiałów Zginanie Wyznaczanie sił wewnętrznych w belkach i ramach, analiza stanu naprężeń i odkształceń, warunek bezpieczeństwa Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości,
Wytrzymałość Materiałów Zginanie Wyznaczanie sił wewnętrznych w belkach i ramach, analiza stanu naprężeń i odkształceń, warunek bezpieczeństwa Wydział Inżynierii Mechanicznej i Robotyki Katedra Wytrzymałości,
Mechanika Ogólna General Mechanics. Inżynieria Bezpieczeństwa I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Bryła sztywna. Fizyka I (B+C) Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego
 Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego") Bryła sztywna Fizyka I (B+C) Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego Typ równowagi zależy od zmiany położenia środka masy ( Równowaga Statyka Bryły sztywnej umieszczonej
Bryła sztywna Fizyka I (B+C) Wykład XXI: Statyka Prawa ruchu Moment bezwładności Energia ruchu obrotowego Typ równowagi zależy od zmiany położenia środka masy ( Równowaga Statyka Bryły sztywnej umieszczonej