Zakład Systemów Zasilania (Z5)
|
|
|
- Ludwika Marczak
- 8 lat temu
- Przeglądów:
Transkrypt
1 Zakład Systemów Zasilania (Z5) Zastosowanie techniki bezprzewodowej transmisji danych cyfrowych do celów monitoringu telekomunikacyjnych systemów zasilania, baterii akumulatorów oraz sterowania funkcją wyrównywania napięć Praca nr Warszawa, grudzień 2006

2 Opracowanie: Zastosowanie techniki bezprzewodowej transmisji danych cyfrowych do celów monitoringu telekomunikacyjnych systemów zasilania, baterii akumulatorów oraz sterowania funkcją wyrównywania napięć Praca nr Słowa kluczowe: Monitoring ;Bezprzewodowa transmisja danych; Systemy pomiarowe Kierownik pracy: Wykonawcy pracy: mgr inż. Maciej Kozyra mgr inż. Robert Samborski mgr inż. Edward Chrustowski mgr inż. Andrzej Binkiewicz inż. Paweł Kliś tnk Kanicki Krzysztof tnk Stułka Andrzej tnk Genowefa Dziuba Kierownik zakładu: inż. Paweł Kliś Copyright by Instytut Łączności, Warszawa

3 Spis treści 1 Cel Pracy Wprowadzenie Kryteria doboru podzespołów Przegląd podzespołów i elementów dostępnych na rynku i analiza ich parametrów pod kątem wykorzystania w systemie Podsumowanie Przeglądu Mikrokontrolerów Przegląd zastosowanych modułów Mikromodułów mikroprocesorowych MMSAM7S MMLPC Płyty uruchomieniowe EVBSam7s EVBSamLPC213x Moduły Radiowe MMRF Oprogramowanie Modułu Radiowego Wyrównywacza Moduły funkcjonalne Algorytm Interfejs użytkownika Oprogramowanie Modułu Radiowego Systemu Nadzoru Moduły funkcjonalne Algorytm Protokół komunikacyjny Zarys koncepcji radiowego systemu nadzoru nad modułami wyrównywaczy Opis koncepcji systemu Realizacja szkieletu systemu Wyniki badań laboratoryjnych nadajnika MMRF Moc promieniowana nadajnika Emisje niepożądane nadajnika Podsumowanie wyników badań MMRF Badania Systemu Radiowego w siłowni Podsumowanie i wnioski

4 1 Cel Pracy Celem projektu jest budowa systemu monitoringu bezprzewodowego posiadającego funkcję wyrównywania napięć na poszczególnych blokach/ogniwach. Technologia bezprzewodowej dwukierunkowej transmisji danych cyfrowych pozwoli na stworzenie w pełni skalowanego, stosownie do potrzeb, systemu monitorującego nie związanego z żadnym elementem systemu zasilania (przetwornicą, przekształtnikiem etc.). Technologia bezprzewodowa pozwoli uprościć znacząco okablowanie pomiarowe baterii (dużych). 2 Wprowadzenie Obecnie stosowane układy monitoringu nie pozwalają na wyrównywanie napięć poszczególnych bloków/ ogniw. Rozwój i spadek cen transceiverów pracujących w wolnodostępnym paśmie ISM 433 MHz pozwala na masowe adaptacje i projektowanie nowych systemów nadzoru. Bezprzewodowa wymiana danych pozwoli na uproszczenie gromadzenia danych przez systemy nadzoru (SN), a także na możliwość tworzenia wirtualnych systemów nadzoru. Tego typu systemy będą pozwalały na klejenie za pomocą łączy radiowych nowych parametrów, których nie uwzględniono w trakcie tworzenia SN i przyspieszenie montażu systemów nadzoru w takcie zwykłego przeglądu eksploatacyjnego systemów zasilania. Akwizycja, agregacja i transmisja tanich w tego typu rozwiązaniach staje się bardzo elastyczna. W przypadku dużych bloków bateryjnych, konieczne jest projektowanie nowych instalacji, aby wprowadzić niewielkie zmiany w istniejących SN. Podwyższa to koszty i zwiększa czas trwania remontu/przegląd, a dodatkowo wydłuża i podraża proces przeglądu i wymaga zaangażowania dodatkowych osób weryfikujących poprawność wykonanej pracy. Istniejące systemy bezprzewodowej wymiany danych pozwalają na takie zaprojektowanie SN aby większość z ww. czynności zautomatyzować. Otwiera także nowe możliwości wprowadzenia wirtualnych systemów nadzoru, tworzonych dynamicznie w zależności od potrzeb lub możliwości finansowych odbiorców 4

5 3 Kryteria doboru podzespołów W trakcie doboru elementów i podzespołów w pracy kierowano się kilkoma kryteriami. Podstawowym kryterium była cena i powszechna dostępność układów na rynku. Do pozostałych należały: nowoczesność układów zastosowanych w aplikacji, otwartość wykorzystanego oprogramowania, wsparcie ze strony więcej niż jednego producenta i możliwie najlepszy współczynnik możliwości do ceny wybieranych układów. 4 Przegląd podzespołów i elementów dostępnych na rynku i analiza ich parametrów pod kątem wykorzystania w systemie 4.1 Podsumowanie Przeglądu Mikrokontrolerów Przeprowadzona analiza funkcji realizowanych przez mikrokontrolery prezentowanych powyżej firm pozwala na postawienie tez, że w przypadku realizacji układu wyrównywacza z funkcją nadajnika radiowego w oparciu o mikroprocesor 32 bitowy wydaje się trafnym wybór procesorów ARM firmy Atmel z rdzeniami ARM7STDMI. Firma Atmel oferuje wiele procesorów 32- bitowych wraz z darmowymi narzędziami do ich programowania. Procesory te mogą być przeprogramowywane w zrealizowanych aplikacjach bez konieczności ingerencji fizycznej w układ. W przypadku konieczności zastosowania mikrokontrolerów o wyższej wydajności od rodziny ARM7STDMI, należałoby zastosować procesory z rdzeniem ARM9TDMI. Oferuje je bardzo wiele firm. Uniezależniło by to użytkowników procesorów od dyktatów cenowych konkretnych firm, ponieważ oprogramowanie napisane na ARM daje się łatwo adaptować na różne mikrokontrolery, należy jedynie zainwestować w oprogramowanie wspierające procesory wielu producentów. Można zastosować oczywiście oprogramowanie GNU dla procesorów ARM, wspierane przez wiele ośrodków uniwersyteckich na całym świecie. 5

6 Elementy wykorzystywane w radiowym systemie monitoringu 5 Przegląd zastosowanych modułów 5.1 Mikromodułów mikroprocesorowych MMSAM7S256 MMsam7s jest uniwersalnym minimodułem dla mikrokontrolerów AT91SAM7S firmy Atmel. Mikrokontroler ten jest dostępny w obudowie TQFP64, która ze względu na zagęszczony układ wyprowadzeń utrudnia stosowanie go w układach prototypowych. W pracy posłużyliśmy się modułem procesorowym na płytce o wymiarach 36x36 mm z układem wyprowadzeń pasującym do ogólnie dostępnych druków prototypowych. Dodatkowo modył ten posiada stabilizator 3.3 V oraz pamięć szeregową DataFlash o pojemności do 4MB. Wszystkie porty i sygnały mikrokontrolera wyprowadzono przy pomocy dwurzędowych złącz szpilkowych o rastrze 0,1. Minimoduł ten jest kompletną płytą główną dla AT91SAM7S. Do samodzielnej pracy układu należy podłączyć napięcie zasilania, w przypadku programowania zaś złącze JTAG lub gniazdo USB. Dzięki zintegrowaniu peryferii z mikrokontrolerem na jednej płytce, zastosowanie modułu skraca czas projektowania i ułatwia budowę systemów bazujących na mikrokontrolerach AT91SAM7S, eliminując konieczność projektowania obwodu drukowanego. 6

7 Schemat 1 7

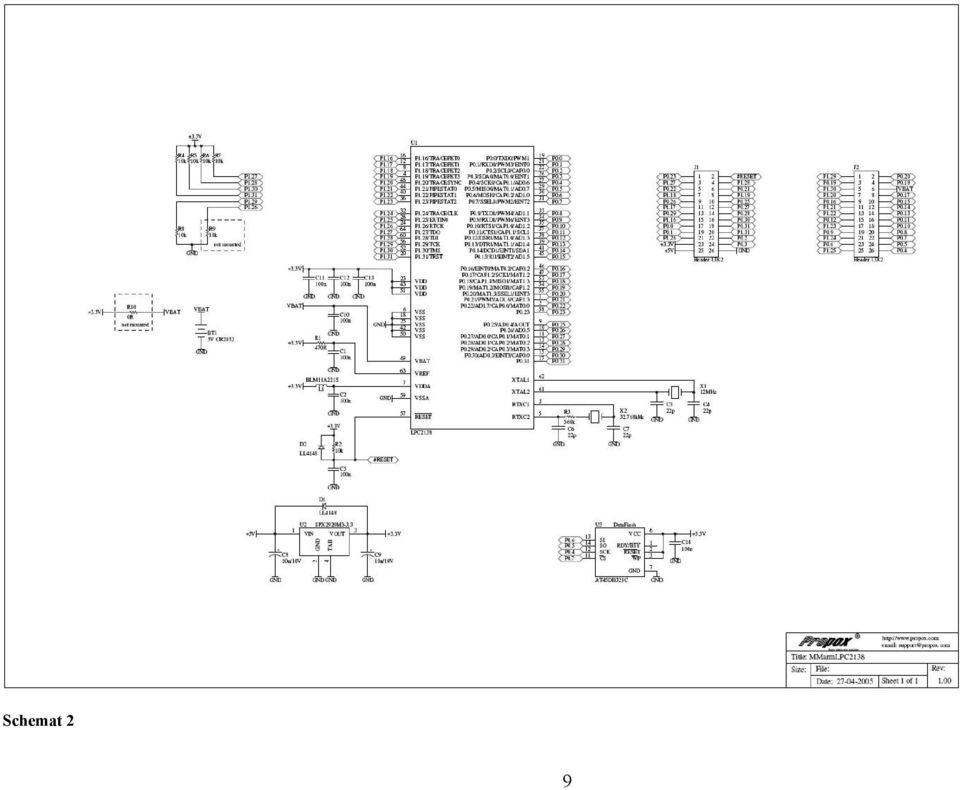
8 5.1.2 MMLPC2138 MMlpc213x jest uniwersalnym minimodułem dla mikrokontrolerów LPC213x firmy Philips. Mikrokontroler ten jest dostępny w obudowie TQFP64, która ze względu na zagęszczony układ wyprowadzeń utrudnia stosowanie go w układach prototypowych i amatorskich. Minimoduł to płytka o wymiarach 36x36 mm z układem wyprowadzeń pasującym do ogólnie dostępnych druków prototypowych. Dodatkowo wyposażona w stabilizator 3.3 V oraz pamięć szeregową DataFlash o pojemności do 4MB. Wszystkie porty i sygnały mikrokontrolera wyprowadziliśmy przy pomocy dwurzędowych złącz szpilkowych o rastrze 0,1. Minimoduł ten jest kompletną płytą główną dla LPC213x. Wystarczy podłączyć napięcie zasilania, złącze JTAG i możliwe jest ładowanie 512 kb pamięci Flash mikrokontrolera. Dzięki zintegrowaniu peryferii z mikrokontrolerem na jednej płytce, zastosowanie modułu skraca czas projektowania i ułatwia budowę systemów bazujących na mikrokontrolerach LPC213x, eliminując konieczność projektowania obwodu drukowanego. Schemat minimodułu zamieszczono poniżej 8

9 Schemat 2 9
10 5.2 Płyty uruchomieniowe EVBSam7s Płyta EVBsam7s umożliwia projektantowi systemów opartych na minimodule MMsam7s obudowanie wewnętrznych urządzeń mikroukładu o układy komunikacyjne i niezbędne łącza uniwersalne do bazy sprzętowej umożliwiającej szybki i łatwy sposób realizacji i weryfikacji swojego pomysłu. Płyta została zaprojektowana w taki sposób, aby użytkownik miał dostęp do wszystkich końcówek modułu wyprowadzonych na złącza. Na płycie zostały także umieszczone peryferia takie jak: diody LED, przyciski, potencjometry, wyświetlacz LCD, interfejs RS232, złącze 1-Wire. Wszystkie te elementy są dostępne na złączach szpilkowych, pozwalając na podłączenie ich do np. dowolnego portu procesora. Płyta posiada także duże pole prototypowe, dające użytkownikowi możliwość dołączania w łatwy sposób innych elementów i dowolnej ich konfiguracji. Na płycie umieszczony jest również zasilacz zwalniający użytkownika z obowiązku dostarczania stałego napięcia stabilizowanego. Schemat modułu zamieszczamy poniżej 10

11 Schemat 3 11

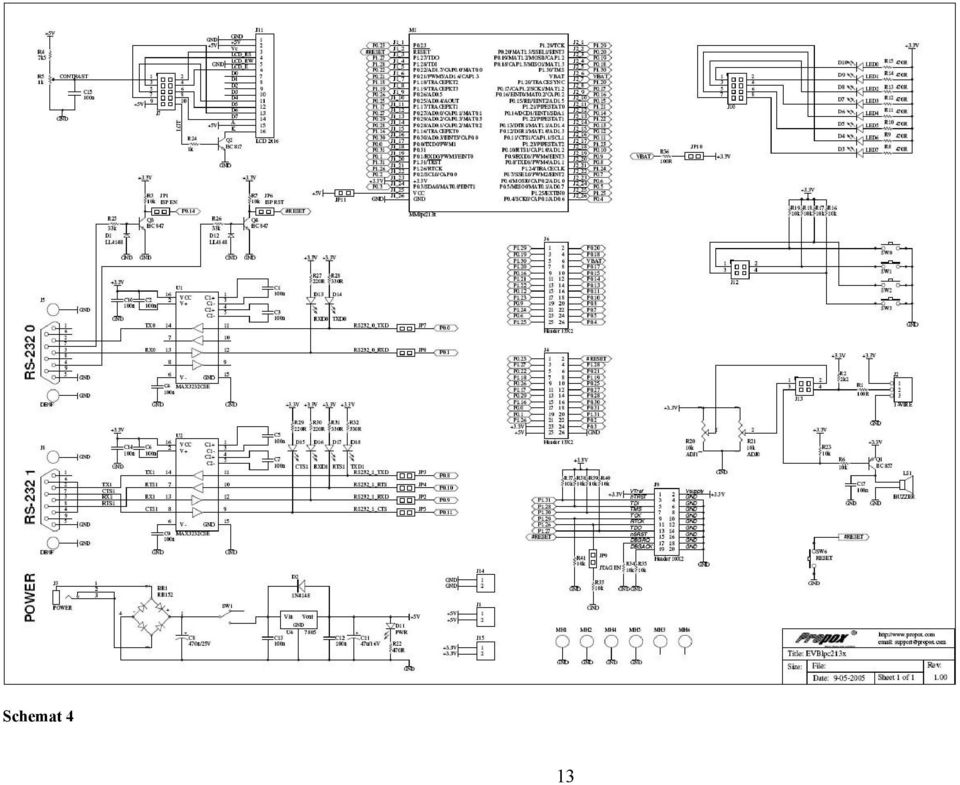
12 5.2.2 EVBSamLPC213x Płyta EVBlpc213x powstała umożliwia projektantowi systemów opartych na minimodule MMlpc213x obudowanie wewnętrznych urządzeń mikroukładu o układy komunikacyjne i niezbędne łącza uniwersalne do bazy sprzętowej umożliwiającej w szybki i łatwy sposób realizacji weryfikacji projektów realizowanych na jego podstawie. Płyta została zaprojektowana w taki sposób, aby użytkownik miał dostęp do wszystkich końcówek modułu wyprowadzonych na złącza. Na płycie zostały także umieszczone peryferia takie jak: diody LED, przyciski, potencjometry, wyświetlacz LCD, interfejs RS232, złącze 1-Wire. Wszystkie te elementy są dostępne na złączach szpilkowych, pozwalając na podłączenie ich do np. dowolnego wyprowadzenia procesora. Płyta posiada także duże pole prototypowe, dające użytkownikowi możliwość dołączania w łatwy sposób innych elementów i dowolnej ich konfiguracji. Dzięki nacięciu pomiędzy polem prototypowym a resztą płyty, może ono zostać odłamane. Na płycie umieszczony jest również układ prostownika i stabilizatora. Schemat płyty EVBlpc213x zamieszczamy poniżej 12

13 Schemat 4 13
14 5.3 Moduły Radiowe MMRF211 MM86rf211 jest miniaturowym, kompletnym modułem nadawczo-odbiorczym (transceiverem), zbudowanym w oparciu o układ AT86rf211 firmy Atmel. Moduł pracuje w wolnodostępnym paśmie ISM 433MHz i zawiera wszystkie niezbędne do pracy elementy, oprócz anteny. Gotowego modułu obniża koszty realizacji układów korzystających z funkcji radiowych od konieczności projektowania części systemu pracującej z częstotliwościami radiowymi oraz kompletowania odpowiednich elementów. Dziki temu budowa systemów wykorzystujących komunikacji radiowej staje się szybsza i prostsza. Układ AT86rf211 jest jednoukładowym transceiverem UKF, przeznaczonym do aplikacji o małym poborze mocy i niskim napięciu zasilania. Może być używany przy częstotliwościach mieszczących się w zakresie MHz.Szczegółowe informacje dotyczące układu AT86rf211 można znaleźć na stronie producenta: MM86rf211 komunikuje się z mikrokontrolerem poprzez dwa szeregowe interfejsy: jeden z nich służy do konfigurowania układu a drugi do przesyłania i odbierania danych poprzez łącze radiowe. MM86rf211 może być użyty zarówno do prototypu, eliminując konieczność projektowania obwodu drukowanego, jak i do układu finalnego, w którym minimoduł montowany jest w postaci "kanapki". Główne cechy modułu Kompletny, gotowy do użycia transceiver Małe wymiary Montaż poziomy lub pionowy Praca w paśmie 433 MHz Prędkość transmisji do 64 kbaud Napięcie zasilania: V Niski pobór mocy, różne tryby pracy Moc wyjściowa programowana w zakresie 0 do 14 dbm Wysoka czułość -105 dbm 14

15 Pomiar RSSI (Received Signal Strength Indicator wskaźnik poziomu odbieranego sygnału) Programowana częstotliwość nadawania i odbioru Programowa i sprzętowa kontrola mocy nadawania Schemat modułu zamieszczono na następnej stronie 15

16 Schemat 5 16

17 6 Oprogramowanie Modułu Radiowego Wyrównywacza 6.1 Moduły funkcjonalne Program główny inicjuje wszystkie parametry procesora, jego urządzeń wewnętrznych, definiuje stałe i inicjuje zmienne programu oraz tworzy pętle przetwarzającą komunikaty. Każde z urządzeń wykorzystuje przerwania sprzętowe do realizacji poszczególnych funkcji wykonywanych przez urządzenia. Wszystkie programy obsługi mają przypisany odpowiedni priorytet w wewnętrznym kontrolerze przerwań. Czas obsługi przerwania jest zróżnicowany. Procedury wymagające długich obliczeń takie, jak przetworzenie danych pomiarowych są inicjowane przez przerwanie od timera1, który wysyła komunikat do programu głównego poprzez ustawienie flagi obsługi w zmiennej stanu programu głównego i ustawienie odpowiednich wartości parametrów wymaganych do analizy. Porty szeregowe procesora wykorzystywane są jako interfejsy komunikacyjne. Użytkownik może się skomunikować z programem wyrównywacza za pomocą modułu radiowego RF211 lub też poprzez port szeregowy USART1. Konfiguracja modułu radiowego odbywa się za pomocą i PIO (Parallel Input/Output Controller ) i jest wykonywana przed procedurami komunikacji radiowej. Wstępne nastawy parametrów komunikacyjnych realizuje się w trakcie 17

18 programowania i są one przechowywane w pamięci flash. W trakcie działania wyrównywacza tj po zainicjowaniu programu po ustabilizowaniu się parametrów zasilania tj po ok. 100ms podstawowe rozpoczyna się realizacja funkcji wyrównywania i trwa ona nieprzerwanie. 6.2 Algorytm Program główny stanowi nieskończona pętla przetwarzania komunikatów. Wszystkie parametry konieczne do realizacji programu głównego, są obliczane w programach obsługi urządzeń, bądź też przez funkcje obsługi. Komunikacja wyrównywacza z otoczeniem może być zainicjowania poprzez MMRF211 lub tez USART1. RF211 Odbiera sygnały radiowe w paśmie 433MHz i po odebraniu ramki startowej wywołującej go, przechodzi w stan nadawania i wysyła uprzednio przygotowany rekord z danymi i kodami CRC dwukrotnie. Po nadaniu przechodzi w stan odbioru i oczekuje na następne wywołanie. Komunikacja poprzez USART1 (US1) działa równolegle z modułem radiowym. US1 umożliwia zmianę parametrów i wyświetlanie danych transmitowanych jak i odbieranych poprzez wyrównywacz. Obecnie zrealizowano możliwość wyświetlanie aktualnych parametrów wyrównywacza i RF211, zmiany czułości RF211, regulację progu zadziałania RF211, wyświetlanie bieżących wartości pomiarowych. Składowanie danych jest zrealizowane w pamięci FLASH. Dane inicjowane w tracie procedury startowej jak i zapisywane w trakcie wykonywania programu za pomocą magistrali SPI są zapisywane do pamięci. Rekord danych jest zapisywany w pamięci pod kolejnym adresem wskazywanym przez wskaźnik wolnego miejsca. Po wypełnieniu całej pamięci dane ponownie są zapisywane od początku zamazując najstarsze dane i tak cyklicznie. Sterowanie procesem wyrównywania napięć nie korzysta aktualnie z danych zgromadzonych w pamięci FLASH. Są one przechowywane ze względu na system nadzoru, który w przyszłości będzie mógł pobrać gromadzone dane pomiarowe. Dane pomiarowe przechowywane są w tablicach pomiarowych adc dane z przetwornika ADC, temp dane z czujnika temperatury i prąd - dane z inteligentnego bocznika pomiarowego. Horyzont czasowy tablicy zależny jest od nastawionej częstotliwości dokonywania pomiarów. W przypadku maksymalnych rozdzielczości o częstotliwości odczytu decyduje wartość prądu której wartość możnemu odczytać co ok. 5s. Zegar czasu rzeczywistego kontrolera RTT umożliwia nam zapisanie bieżącego czasu pomiaru jest on zapisywany w każdym rekordzie pomiarowym stanowiąc jego indeks główny. 18

19 19

20 20

21 21
22 22
23 6.2.1 Interfejs użytkownika Komunikacja z użytkownikiem odbywa się poprzez port szeregowy USART1. Wyświetlenie menu jest realizowane poprzez wysłanie m lub M. Zmiana parametrów jest realizowana poprzez wybranie parametru np.: t / T czułość modułu radiowego, h / H wartość histerezy sygnału odbieranego 5 - ustawienie progu komparatora, a - wyświetlenie wszystkich parametrów, s zapis aktualnie ustawionych parametrów do pamięci FLASH, = / - inkrementacja, dekrementacja aktualnie zmienianego parametru, + / _ mnożenie, 23
24 dzielenie parametru przez stałą zadaną w programie np. 1,20. włączenie/wyłączenie wyświetlania danych pomiarowych. 7 Oprogramowanie Modułu Radiowego Systemu Nadzoru 7.1 Moduły funkcjonalne Rysunek 1 Rysunek 1 przedstawia funkcjonalny podział relacji urządzeń wewnętrznych procesora i programów obsługi. Program główny inicjuje wszystkie parametry procesora, jego urządzeń wewnętrznych, definiuje stałe i inicjuje zmienne programu oraz tworzy pętle przetwarzającą komunikaty. Każde z urządzeń wykorzystuje przerwania sprzętowe do realizacji poszczególnych funkcji wykonywanych przez urządzenia. Wszystkie programy obsługi mają przypisany odpowiedni priorytet w wewnętrznym kontrolerze przerwań. Czas obsługi przerwania jest zróżnicowany. Procedury wymagające długich obliczeń takie, jak przetworzenie danych pomiarowych są inicjowane przez przerwanie od timera1, który wysyła komunikat do programu głównego poprzez ustawienie flagi obsługi w zmiennej stanu programu głównego i ustawienie odpowiednich wartości parametrów wymaganych do analizy. Porty szeregowe procesora wykorzystywane są jako interfejsy komunikacyjne. Użytkownik może się skomunikować z programem układu nadzoru za pomocą portu szeregowego USART1. Konfiguracja modułu radiowego odbywa się za pomocą i PIO (Parallel Input/Output Controller ) i jest wykonywana przed procedurami komunikacji radiowej. 24
25 Wstępne nastawy parametrów komunikacyjnych realizuje się w trakcie programowania i są one przechowywane w pamięci flash. W trakcie działania wyrównywacza tj. po zainicjowaniu programu po ustabilizowaniu się parametrów zasilania tj. po ok. 100ms podstawowe rozpoczyna się realizacja funkcji wyrównywania i trwa ona nieprzerwanie. 7.2 Algorytm Program główny stanowi nieskończona pętla przetwarzania komunikatów. Wszystkie parametry konieczne do realizacji programu głównego, są obliczane w programach obsługi urządzeń, bądź też przez funkcje obsługi. Komunikacja systemu nadzoru z otoczeniem może być zainicjowania poprzez MMRF211 lub tez USART1. RF211 Odbiera sygnały radiowe w paśmie 433MHz i po odebraniu ramki startowej wywołującej go, przechodzi w stan nadawania i wysyła uprzednio przygotowany rekord z danymi i kodami CRC dwukrotnie. Po nadaniu przechodzi w stan odbioru i oczekuje na następne wywołanie. Komunikacja poprzez USART1 (US1) działa równolegle z modułem radiowym. US1 umożliwia zmianę parametrów i wyświetlanie danych transmitowanych jak i odbieranych poprzez wyrównywacz. Obecnie zrealizowano możliwość wyświetlanie aktualnych parametrów wyrównywacza i RF211, zmiany czułości RF211, regulację progu zadziałania RF211, wyświetlanie bieżących wartości pomiarowych. Składowanie danych jest zrealizowane w pamięci FLASH. Dane inicjowane w tracie procedury startowej jak i zapisywane w trakcie wykonywania programu za pomocą magistrali SPI są zapisywane do pamięci. Rekord danych jest zapisywany w pamięci pod kolejnym adresem wskazywanym przez wskaźnik wolnego miejsca. Po wypełnieniu całej pamięci dane ponownie są zapisywane od początku zamazując najstarsze dane i tak cyklicznie. Sterowanie procesem wyrównywania napięć nie korzysta aktualnie z danych zgromadzonych w pamięci FLASH. Są one przechowywane ze względu na system nadzoru, który w przyszłości będzie mógł pobrać gromadzone dane pomiarowe. 25
26 26
27 27
28 Interfejs użytkownika Komunikacja z użytkownikiem odbywa się poprzez port szeregowy USART1. Wyświetlenie menu jest realizowane poprzez wysłanie m lub M. Zmiana parametrów jest realizowana poprzez wybranie parametru np.: t / T czułość modułu radiowego, h / H wartość histerezy sygnału odbieranego 5 - ustawienie progu komparatora, a - wyświetlenie wszystkich parametrów, s zapis aktualnie ustawionych parametrów do pamięci FLASH, = / - inkrementacja, dekrementacja aktualnie zmienianego parametru, + / _ mnożenie, dzielenie parametru przez stałą zadaną w programie np. 1,20. włączenie/wyłączenie wyświetlania danych pomiarowych otrzymywanych z wyrównywaczy, l / L wyświetlenie aktualnie zgromadzonych danych w pamięci FLASH. 28
29 7.3 Protokół komunikacyjny 29
30 8 Zarys koncepcji radiowego systemu nadzoru nad modułami wyrównywaczy 8.1 Opis koncepcji systemu Obecnie stosowane układy monitoringu nie pozwalają na wyrównywanie napięć poszczególnych bloków/ ogniw. Rozwój i spadek cen transceiverów pracujących w wolno dostępnym paśmie ISM 433 MHz pozwala na masowe adaptacje i projektowanie nowych systemów nadzoru. Bezprzewodowa wymiana danych pozwoli na uproszczenie gromadzenia danych przez systemy nadzoru (SN), a także na możliwość tworzenia wirtualnych systemów nadzoru. Tego typu systemy będą pozwalały na klejenie za pomocą łączy radiowych nowych parametrów, których nie uwzględniono w trakcie tworzenia SN i przyspieszenie montażu systemów nadzoru w takcie zwykłego przeglądu eksploatacyjnego systemów zasilania. Akwizycja, agregacja i transmisja tanich w tego typu rozwiązaniach staje się bardzo elastyczna. System ma umożliwić budowę dużych systemów zasilania bez konieczności ponoszenia kosztów na drogie i skomplikowane okablowywanie dużych systemów bateryjnych składających się z wielu baterii rozproszonych na obszarze zasięgu transceiverów. Rozważane są trzy warianty systemu. W pierwszym wariancie system prowadzi nadzór baterii w oparciu o informacje gromadzone w wyrównywaczach baterii. Każdy z wyrównywaczy posiada pamięć wewnętrzną pozwalającą na gromadzenie pomiarów i prostą analizę zgromadzonych pomiarów, tak aby możliwe było systematyczne przesyłanie informacji w sposób uporządkowany w określonych przedziałach czasowych. Zadaniem układu nadzoru jest monitorowanie stanu baterii poprzez cykliczne odpytywanie poszczególnych wyrównywaczy o informacje o ich stanie i taka agregacja danych, aby możliwe było określenie w jakim stanie jest cała bateria, czy wręcz siłownia. 30
31 Rysunek 2 Wariant drugi to połączenie wyrównywaczy z układami nadzoru. Tego typu wyrównywacze będą posiadały od oprócz podstawowej funkcji wyrównywania i pomiaru parametrów baterii również funkcje układu nadzoru. Centralny układ nadzoru, jeden dla dużego obiektu, będzie umożliwiał koordynację działań siłowni w oparciu o wiedzę zgromadzoną na przez układu nadzoru niższego rzędu. Duża chmura obrazuje warstwę komunikacyjną wspólną dla wszystkich układów, małe zaś obrazują dedykowane linki komunikacyjne pozwalające na komunikację systemów nadzoru w ramach sąsiedzkiej wymiany danych pozwalającej na efektywniejsze wykorzystanie pasma i efektywniejsze przesyłanie danych w ramach miniaturowej sieci nadzoru. 31
32 Rysunek 3 Wariant trzeci (Rysunek 4) przedstawia układ nadzoru, w którym możliwa jest praca równoległa wielu tego typu systemów w różnych warstwach. Możliwe jest to dzięki wykorzystaniu wielu częstotliwości transmisyjnych dla poszczególnych warstw. Każdą z tych warstw należy traktować jak niezależny system nadzoru. W przypadku konieczności koordynacji działań poszczególnych warstw, najlepszym rozwiązaniem wydaje się stworzenie węzłów koordynacyjnych pozwalających na optymalne zarządzanie zasobami systemu. 32
33 Rysunek 4 33
34 9 Realizacja szkieletu systemu Pierwsze próby funkcjonowania systemu przeprowadzono w oparciu o pierwszy wariant z pierwszy ( Rysunek 2). W rozwiązaniu tym moduł nadzoru cyklicznie odpytuje układy wyrównywaczy o parametry jakie mierzą wyrównywacze tj. napięcia ogniwa/baterii, prąd, temperaturę, ładunek jaki aktualnie jest zgromadzony w ogniwie. Każdy z wyrównywaczy przechowuje pomiary w swojej wewnętrznej pamięci. Zastosowana pamięć pozwala na przechowanie średnich czterech parametrów mierzonych z częstotliwością jednego pomiaru na minutę przez okres jednego roku. Wyrównywacz w trakcie wykonywania pomiaru przetwarza dane do przesłania do postaci rekordu o określonej strukturze wraz z sumą kontrolną CRC. Po wywołaniu układu wyrównywacza, mikrokontroler układu przełącza moduł radiowy w tryb nadawania, po ustabilizowaniu się nadajnika wysyła rekord z danymi dwukrotnie. Po porównaniu obu rekordów układ nadzoru decyduje, czy transmisja się powiodła. W zależności od potrzeb może ona zostać zarówno potwierdzona lub też nie. Zależy to od trybu pracy wyrównywaczy i układu nadzoru. Dla potrzeb projektowanego systemu układ nadzoru gromadzi zarówno dane odebrane prawidłowo jak i nieprawidłowo, do celów późniejszej analizy problemów jakie stwarzają połączenia radiowe. W obecnym stanie systemu nie zaimplementowano na razie żadnych stanów alarmowych linku radiowego. Analizę taką na razie przeprowadza się na podstawie otrzymanych danych. Zbudowano także wyrównywacz pozwalający na jednoczesny pomiar i wyrównywanie czterech ogniw baterii, aby obniżyć kosz wyrównywacza spowodowany ceną modułu radiowego (cena modułu to blisko 50% ceny całego układu wyrównywacza). Aby jeszcze bardziej obniżyć cenę drugi wariant systemu wykorzystuje wszystkie funkcje pierwszego, ale jeden z wyrównywaczy oprócz funkcji wyrównywania, realizuje funkcje nadzoru. Wariant trzeci wielowarstwowy sprawdzono wyłącznie w warstwie łącza radiowego zasymulowano jednoczesne funkcjonowanie kilku warstw komunikacyjnych przy użyciu modułu sterującego wyrównywaczem, modułu radiowego i specjalnie napisanego programu testującego zadającego parametry po jednym linku radiowym na każdą warstwę 34
35 komunikacyjną. W warunkach laboratoryjnych po automatycznej kalibracji układów nie stwierdzono występowania błędów w budynku w obszarze ok. 50 metrów 10 Wyniki badań laboratoryjnych nadajnika MMRF Moc promieniowana nadajnika Tab. 1: Moc promieniowana nadajnika, pomiary natężenia pola (polaryzacja V), EN clause 8.3: Effective radiated power Moc znamionowa (e.r.p.) Częstotliwość znamionowa [MHz] 433,92 Temperatura Napięcie zasilania [V] +23 o C normalne 5,0 2,3 (3,6 dbm) maksymalne minimalne maksymalne minimalne Niepewność pomiaru: poziomu ±4 db, częstotliwości ±0,1 khz. Wartości graniczne: w tabelach poniżej: Klasa urządzenia wg EN < 10 mw (10 dbm) Moc promieniowana (e.r.p.) [mw] Poziom mocy w.cz. [mw] 5a 0,025 7a Wg Zalecenia ERC/REC i rozporządzenia MI z dnia r. współczynnik aktywności δ nadajnika i wartość graniczna mocy P (e.r.p.) Odstęp międzykanałowy: nie dotyczy; δ < 10%; P 10 mw Odstęp międzykanałowy: nie dotyczy; δ 100%; P 1 mw; Odstęp międzykanałowy: 25 khz; δ 100%; P 10 mw; 13 dbm/10 khz Wniosek: Moc promieniowana mieści się w granicach ustalonych dla klasy 7a wymagania wg zalecenia ERC/REC i wymagania krajowe (założono: δ < 10%): są spełnione. 35
36 10.2 Emisje niepożądane nadajnika Tab. 2.1: Emisje niepożądane nadajnika (natężenie pola), warunki normalne (polaryzacja H), EN clause 8.7: Spurious emissions Częstotliwość (kanał) Częstotliwość składowej Moc składowej (e.r.p.) [MHz] [MHz] [dbm] [nw] 433,92 867, ,8 6, , ,9 10,23 pozostałe składowe /* < 60,0 < 1,0 Niepewność pomiaru: ±4 db. Wartości graniczne: wg EN podane są w tabeli poniżej: Zakres częstotliwości 47,0 do 74 MHz; 87,5 do 118 MHz 174,0 do 230 MHz 470,0 do 862 MHz Inne od 25 MHz do 1 GHz Powyżej 1 GHz /* Nadajnik pracuje 4 nw ( 54 dbm) 0,25 µw ( 36 dbm) 1,0 µw ( 30 dbm) Nadajnik w stanie gotowości 2 nw ( 57 dbm) 2 nw ( 57 dbm) 20 nw ( 47 dbm) /* Uwaga. Badania w zakresie do 4 GHz w przypadku urządzenia pracującego na częstotliwości mniejszej niż 470 MHz. W zakresie do 12,75 GHz w przypadku urządzenia pracującego na częstotliwości większej niż 470 MHz. Wniosek: wymagania są spełnione. 36
37 Tab. 2.2: Emisje niepożądane nadajnika (natężenie pola), warunki normalne (polaryzacja V), EN clause 8.7: Spurious emissions Częstotliwość (kanał) Częstotliwość składowej Moc składowej (e.r.p.) [MHz] [MHz] [dbm] [nw] 433,92 867, ,2 47, , ,6 10,96 pozostałe składowe /* < 60,0 < 1,0 Niepewność pomiaru: ±4 db. Wartości graniczne: wg EN podane są w tabeli poniżej: Zakres częstotliwości 47,0 do 74 MHz; 87,5 do 118 MHz 174,0 do 230 MHz 470,0 do 862 MHz Inne od 25 MHz do 1 GHz Powyżej 1 GHz /* Nadajnik pracuje 4 nw ( 54 dbm) 0,25 µw ( 36 dbm) 1,0 µw ( 30 dbm) Nadajnik w stanie gotowości 2 nw ( 57 dbm) 2 nw ( 57 dbm) 20 nw ( 47 dbm) /* Uwaga. Badania w zakresie do 4 GHz w przypadku urządzenia pracującego na częstotliwości mniejszej niż 470 MHz. W zakresie do 12,75 GHz w przypadku urządzenia pracującego na częstotliwości większej niż 470 MHz. Wniosek: wymagania są spełnione. Wykaz użytej aparatury: 26, 27, 32, 33, 35 / C, 36 / D/E, 45,
38 1 PK MAXH RF211 Równoważna moc promieniowana nadajnika, polaryzacja V Ref -10 dbm Att 15 db * RBW 30 khz * VBW 30 khz SWT 5 ms 2 Marker 1 [T1 ] dbm MHz Marker 2 [T1 ] dbm MHz A P Tx = P G + G A P G = 5,7 dbm (moc generatora) G = 0 dbd (zysk anteny podstawienia) A = 2,1 db (tłumienie kabla) P Tx = 3,6 dbm (równoważna moc promieniowana) Center MHz 100 khz/ Span 1 MHz 38
39 1 PK MAXH RF211 Ref dbm Emisje niepożądane nadajnika, polaryzacja H (II harmoniczna) * Att 5 db * RBW 30 khz * VBW 30 khz SWT 5 ms Marker 1 [T1 ] dbm MHz A P E = P G + G A P G = 48,9 dbm G = 0 dbd A = 2,9 db P E = 51,8 dbm Center MHz 100 khz/ Span 1 MHz 1 PK MAXH RF211 Ref dbm Emisje niepożądane nadajnika, polaryzacja H (III harmoniczna) * Att 5 db * RBW 30 khz * VBW 30 khz SWT 5 ms Marker 1 [T1 ] dbm GHz A P E = P G + G A P G = 46,2 dbm G = 0 dbd A = 3,7 db P E = 49,9 dbm Center GHz 100 khz/ Span 1 MHz 39
40 1 PK MAXH RF211 Ref dbm Emisje niepożądane nadajnika, polaryzacja V (II harmoniczna) * Att 5 db * RBW 30 khz * VBW 30 khz SWT 5 ms Marker 1 [T1 ] dbm MHz A P E = P G + G A P G = 40,3 dbm G = 0 dbd A = 2,9 db P E = 43,2 dbm Center MHz 100 khz/ Span 1 MHz 1 PK MAXH RF211 Ref dbm Emisje niepożądane nadajnika, polaryzacja V (III harmoniczna) * Att 5 db * RBW 30 khz * VBW 30 khz SWT 5 ms Marker 1 [T1 ] dbm GHz A P E = P G + G A P G = 45,9 dbm G = 0 dbd A = 3,7 db P E = 49,6 dbm Center GHz 100 khz/ Span 1 MHz 40
To jeszcze prostsze, MMcc1100!
 MMcc1100 jest miniaturowym, kompletnym modułem nadawczo-odbiorczym (transceiverem), słuŝącym do przesyłania danych w postaci cyfrowej, zbudowanym w oparciu o układ CC1100 firmy Texas Instruments. Moduł
MMcc1100 jest miniaturowym, kompletnym modułem nadawczo-odbiorczym (transceiverem), słuŝącym do przesyłania danych w postaci cyfrowej, zbudowanym w oparciu o układ CC1100 firmy Texas Instruments. Moduł
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Rozproszony system zbierania danych.
 Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android
 Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
Bezprzewodowa sieć kontrolno-sterująca z interfejsem Bluetooth dla urządzeń mobilnych z systemem Android Wykonanie: Łukasz Tomaszowicz Promotor: dr inż. Jacek Kołodziej Cel pracy dyplomowej Celem pracy
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
3GHz (opcja 6GHz) Cyfrowy Analizator Widma GA4063
 Cyfrowy Analizator Widma GA4063") Cyfrowy Analizator Widma GA4063 3GHz (opcja 6GHz) Wysoka kla sa pomiarowa Duże możliwości pomiarowo -funkcjonalne Wysoka s tabi lność Łatwy w użyc iu GUI Małe wymiary, lekki, przenośny Opis produktu GA4063
Cyfrowy Analizator Widma GA4063 3GHz (opcja 6GHz) Wysoka kla sa pomiarowa Duże możliwości pomiarowo -funkcjonalne Wysoka s tabi lność Łatwy w użyc iu GUI Małe wymiary, lekki, przenośny Opis produktu GA4063
SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701. SigmaDSP - zestaw uruchomieniowy dla procesora ADAU1701.
 SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
SigmaDSP - zestaw uruchomieniowy. SigmaDSP jest niedrogim zestawem uruchomieniowym dla procesora DSP ADAU1701 z rodziny SigmaDSP firmy Analog Devices, który wraz z programatorem USBi i darmowym środowiskiem
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu.
 Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
Wizualizacja stanu czujników robota mobilnego. Sprawozdanie z wykonania projektu. Maciek Słomka 4 czerwca 2006 1 Celprojektu. Celem projektu było zbudowanie modułu umożliwiającego wizualizację stanu czujników
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011
 Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
rh-serwer 2.0 LR Sterownik główny (serwer) systemu F&Home RADIO. Wersja LR powiększony zasięg.
 systemu F&Home RADIO. Wersja LR powiększony zasięg.") KARTA KATALOGOWA rh-serwer.0 LR Sterownik główny (serwer) systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-serwer.0 LR jest centralnym urządzeniem sterującym elementami Systemu F&Home Radio. Zarządza
KARTA KATALOGOWA rh-serwer.0 LR Sterownik główny (serwer) systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-serwer.0 LR jest centralnym urządzeniem sterującym elementami Systemu F&Home Radio. Zarządza
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Instrukcja użytkownika
 MMcc000 Minimoduł do komunikacji radiowej REV Instrukcja użytkownika Evalu ation Board s for, AVR, ST, PIC microcontrollers Sta- rter Kits Embedded Web Serve rs Prototyping Boards Minimodules for microcontrollers,
MMcc000 Minimoduł do komunikacji radiowej REV Instrukcja użytkownika Evalu ation Board s for, AVR, ST, PIC microcontrollers Sta- rter Kits Embedded Web Serve rs Prototyping Boards Minimodules for microcontrollers,
RSD Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle
 Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI. Wrocław, lipiec 1999 r.
 TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI Wrocław, lipiec 1999 r. SPIS TREŚCI 1. OPIS TECHNICZNY...3 1.1. PRZEZNACZENIE I FUNKCJA...3 1.2. OPIS
TERMINAL DO PROGRAMOWANIA PRZETWORNIKÓW SERII LMPT I LSPT MTH-21 INSTRUKCJA OBSŁUGI I EKSPLOATACJI Wrocław, lipiec 1999 r. SPIS TREŚCI 1. OPIS TECHNICZNY...3 1.1. PRZEZNACZENIE I FUNKCJA...3 1.2. OPIS
do 200 m w terenie otwartym 4 przyciski + wyświetlacz Zadana wartość temperatury TX Histereza temperatury ht Wartości ustawiane:
 RADIOWY CZUJNIK TEMPERATURY I NATĘŻENIA OŚWIETLENIA RCL-02 DANE TECHNICZNE Znamionowe napięcie zasilania: Typ baterii: Transmisja: Sposób transmisji: Zasięg: Współpraca z odbiornikami systemu: Współpraca
RADIOWY CZUJNIK TEMPERATURY I NATĘŻENIA OŚWIETLENIA RCL-02 DANE TECHNICZNE Znamionowe napięcie zasilania: Typ baterii: Transmisja: Sposób transmisji: Zasięg: Współpraca z odbiornikami systemu: Współpraca
Spis treści. Wykaz ważniejszych skrótów Wprowadzenie Rdzeń Cortex-M Rodzina mikrokontrolerów XMC
 Wykaz ważniejszych skrótów... 8 1. Wprowadzenie... 9 1.1. Wstęp... 10 1.2. Opis zawartości książki... 12 1.3. Korzyści płynące dla Czytelnika... 13 1.4. Profil Czytelnika... 13 2. Rdzeń Cortex-M0...15
Wykaz ważniejszych skrótów... 8 1. Wprowadzenie... 9 1.1. Wstęp... 10 1.2. Opis zawartości książki... 12 1.3. Korzyści płynące dla Czytelnika... 13 1.4. Profil Czytelnika... 13 2. Rdzeń Cortex-M0...15
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x
 ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
 SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
ZL28ARM. Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC
 ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
ZL28ARM Zestaw uruchomieniowy dla mikrokontrolerów AT91SAM7XC Zestaw ZL28ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów AT91SAM7XC. Dzięki wyposażeniu w szeroką gamę układów peryferyjnych
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
STM32 Butterfly. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32 Butterfly Zestaw STM32 Butterfly jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
ZL29ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
ZL29ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 Zestaw ZL29ARM jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity Line (STM32F107).
AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION
 Krzysztof Bolek III rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION DWUPOŁOŻENIOWY REGULATOR TEMPERATURY Z APLIKACJĄ
Krzysztof Bolek III rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AN ON OFF TEMPERATURE CONTROLLER WITH A MOBILE APPLICATION DWUPOŁOŻENIOWY REGULATOR TEMPERATURY Z APLIKACJĄ
Moduł radiowy AT-WMBUS-04. z wejściem impulsowym. Dokumentacja techniczno ruchowa DT DJ
 Moduł radiowy AT-WMBUS-04 z wejściem impulsowym Dokumentacja techniczno ruchowa WWW.TELEMETRIA.EU DT2013041201DJ 4 SPIS TREŚCI: 1. WSTĘP... 2 2. BUDOWA... 2 3. OPIS DZIAŁANIA... 3 4. INSTALACJA... 4 5.
Moduł radiowy AT-WMBUS-04 z wejściem impulsowym Dokumentacja techniczno ruchowa WWW.TELEMETRIA.EU DT2013041201DJ 4 SPIS TREŚCI: 1. WSTĘP... 2 2. BUDOWA... 2 3. OPIS DZIAŁANIA... 3 4. INSTALACJA... 4 5.
PRZENOŚNY MIERNIK MOCY RF-1000
 PRZENOŚNY MIERNIK MOCY RF-1000 1. Dane techniczne Zakresy pomiarowe: Dynamika: Rozdzielczość: Dokładność pomiaru mocy: 0.5 3000 MHz, gniazdo N 60 db (-50dBm do +10dBm) dla zakresu 0.5 3000 MHz 0.1 dbm
PRZENOŚNY MIERNIK MOCY RF-1000 1. Dane techniczne Zakresy pomiarowe: Dynamika: Rozdzielczość: Dokładność pomiaru mocy: 0.5 3000 MHz, gniazdo N 60 db (-50dBm do +10dBm) dla zakresu 0.5 3000 MHz 0.1 dbm
Moduł uruchomieniowy AVR ATMEGA-16 wersja 2
 Dane aktualne na dzień: 30-08-2016 20:09 Link do produktu: /modul-uruchomieniowy-avr-atmega-16-wersja-2-p-572.html Moduł uruchomieniowy AVR ATMEGA-16 wersja 2 Cena Cena poprzednia Dostępność 211,00 zł
Dane aktualne na dzień: 30-08-2016 20:09 Link do produktu: /modul-uruchomieniowy-avr-atmega-16-wersja-2-p-572.html Moduł uruchomieniowy AVR ATMEGA-16 wersja 2 Cena Cena poprzednia Dostępność 211,00 zł
projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania;
 PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
prowadzący: mgr inż. Piotr Prystupiuk
 prowadzący: mgr inż. Piotr Prystupiuk Instytut Tele- i Radiotechniczny WARSZAWA Zaawansowane technologie teleinformatyczne i systemy informatyczne do budowy zintegrowanych platform obsługi inteligentnych
prowadzący: mgr inż. Piotr Prystupiuk Instytut Tele- i Radiotechniczny WARSZAWA Zaawansowane technologie teleinformatyczne i systemy informatyczne do budowy zintegrowanych platform obsługi inteligentnych
Generator przebiegów pomiarowych Ex-GPP2
 Generator przebiegów pomiarowych Ex-GPP2 Przeznaczenie Generator przebiegów pomiarowych GPP2 jest programowalnym sześciokanałowym generatorem napięć i prądów, przeznaczonym do celów pomiarowych i diagnostycznych.
Generator przebiegów pomiarowych Ex-GPP2 Przeznaczenie Generator przebiegów pomiarowych GPP2 jest programowalnym sześciokanałowym generatorem napięć i prądów, przeznaczonym do celów pomiarowych i diagnostycznych.
SYSTEM MONITOROWANIA TEMPERATURY
 SYSTEM MONITOROWANIA TEMPERATURY BEZPIECZEŃSTWO ŻYCIA CODZIENNEGO Dla konsumenta gwarancja zachowania prawidłowych warunków przechowywania produktów. Dla rodziców pewność, że ich dzieci w przedszkolach
SYSTEM MONITOROWANIA TEMPERATURY BEZPIECZEŃSTWO ŻYCIA CODZIENNEGO Dla konsumenta gwarancja zachowania prawidłowych warunków przechowywania produktów. Dla rodziców pewność, że ich dzieci w przedszkolach
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej. XXXII Olimpiada Wiedzy Elektrycznej i Elektronicznej
 Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
Zestaw pytań finałowych numer : 1 1. Wzmacniacz prądu stałego: własności, podstawowe rozwiązania układowe 2. Cyfrowy układ sekwencyjny - schemat blokowy, sygnały wejściowe i wyjściowe, zasady syntezy 3.
Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0
 Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0 Instrukcja obsługi Wrzesień 2014 Szkoper Elektronik Strona 1 2014-09-29 1 Parametry techniczne: Cyfrowy pomiar temperatury w zakresie od -40 C do 120
Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0 Instrukcja obsługi Wrzesień 2014 Szkoper Elektronik Strona 1 2014-09-29 1 Parametry techniczne: Cyfrowy pomiar temperatury w zakresie od -40 C do 120
Modem radiowy MR10-GATEWAY-S
 Modem radiowy MR10-GATEWAY-S - instrukcja obsługi - (dokumentacja techniczno-ruchowa) Spis treści 1. Wstęp 2. Budowa modemu 3. Parametry techniczne 4. Parametry konfigurowalne 5. Antena 6. Dioda sygnalizacyjna
Modem radiowy MR10-GATEWAY-S - instrukcja obsługi - (dokumentacja techniczno-ruchowa) Spis treści 1. Wstęp 2. Budowa modemu 3. Parametry techniczne 4. Parametry konfigurowalne 5. Antena 6. Dioda sygnalizacyjna
Terminal TR01. Terminal jest przeznaczony do montażu naściennego w czystych i suchych pomieszczeniach.
 Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
Terminal TR01 Terminal jest m, umożliwiającym odczyt i zmianę nastaw parametrów, stanów wejść i wyjść współpracujących z nim urządzeń automatycznej regulacji wyposażonych w port komunikacyjny lub i obsługujących
Miernik mocy w.cz nadajników RC i FPV 1MHz - 8GHz
 Miernik mocy w.cz nadajników RC i FPV 1MHz - 8GHz 1. WSTĘP Miernik mocy w.cz jest ważnym narzędziem pomiarowym każdego użytkownika aparatury RC, w tym LRS czy nadajnika video FPV. Większość sprzętu modelarskiego
Miernik mocy w.cz nadajników RC i FPV 1MHz - 8GHz 1. WSTĘP Miernik mocy w.cz jest ważnym narzędziem pomiarowym każdego użytkownika aparatury RC, w tym LRS czy nadajnika video FPV. Większość sprzętu modelarskiego
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Modem radiowy MR10-NODE-S
 Modem radiowy MR10-NODE-S - instrukcja obsługi - (dokumentacja techniczno-ruchowa) Spis treści 1. Wstęp 2. Wygląd urządzenia 3. Parametry techniczne 4. Parametry konfigurowalne 5. Antena 6. Dioda sygnalizacyjna
Modem radiowy MR10-NODE-S - instrukcja obsługi - (dokumentacja techniczno-ruchowa) Spis treści 1. Wstęp 2. Wygląd urządzenia 3. Parametry techniczne 4. Parametry konfigurowalne 5. Antena 6. Dioda sygnalizacyjna
Rys. 1. Schemat blokowy rejestratora ZRZ-28
 Rys. 1. Schemat blokowy rejestratora ZRZ-28 Rys. 2. Widok wyświetlacza LCD zgłoszenie alarmu. 1. pole daty Mm-Dz, gdzie Mm-miesiąc, Dz-dzień 2. pole godziny GG:MM:SS, gdzie GG-godziny, MM-minuty, SS-sekundy
Rys. 1. Schemat blokowy rejestratora ZRZ-28 Rys. 2. Widok wyświetlacza LCD zgłoszenie alarmu. 1. pole daty Mm-Dz, gdzie Mm-miesiąc, Dz-dzień 2. pole godziny GG:MM:SS, gdzie GG-godziny, MM-minuty, SS-sekundy
DTR PICIO v1.0. 1. Przeznaczenie. 2. Gabaryty. 3. Układ złącz
 DTR PICIO v1.0 1. Przeznaczenie Moduł PICIO jest uniwersalnym modułem 8 wejść cyfrowych, 8 wyjść cyfrowych i 8 wejść analogowych. Głównym elementem modułu jest procesor PIC18F4680. Izolowane galwanicznie
DTR PICIO v1.0 1. Przeznaczenie Moduł PICIO jest uniwersalnym modułem 8 wejść cyfrowych, 8 wyjść cyfrowych i 8 wejść analogowych. Głównym elementem modułu jest procesor PIC18F4680. Izolowane galwanicznie
Uniwersalny modem radiowy UMR433-S2/UK
 Uniwersalny modem radiowy UMR433-S2/UK Dziękujemy za wybór naszego produktu. Niniejsza instrukcja pomoże państwu w prawidłowym podłączeniu urządzenia, uruchomieniu, oraz umożliwi prawidłowe z niego korzystanie.
Uniwersalny modem radiowy UMR433-S2/UK Dziękujemy za wybór naszego produktu. Niniejsza instrukcja pomoże państwu w prawidłowym podłączeniu urządzenia, uruchomieniu, oraz umożliwi prawidłowe z niego korzystanie.
BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO
 Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Dokumentacja Techniczna. Konwerter USB/RS-232 na RS-285/422 COTER-24I COTER-24N
 Dokumentacja Techniczna Konwerter USB/RS-232 na RS-28/422 -U4N -U4I -24N -24I Wersja dokumentu: -man-pl-v7 Data modyfikacji: 2008-12-0 http://www.netronix.pl Spis treści 1. Specyfikacja...3 2. WyposaŜenie...4
Dokumentacja Techniczna Konwerter USB/RS-232 na RS-28/422 -U4N -U4I -24N -24I Wersja dokumentu: -man-pl-v7 Data modyfikacji: 2008-12-0 http://www.netronix.pl Spis treści 1. Specyfikacja...3 2. WyposaŜenie...4
ZL8AVR. Płyta bazowa dla modułów dipavr
 ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
ZL8AVR Płyta bazowa dla modułów dipavr Zestaw ZL8AVR to płyta bazowa dla modułów dipavr (np. ZL7AVR z mikrokontrolerem ATmega128 lub ZL12AVR z mikrokontrolerem ATmega16. Wyposażono ją w wiele klasycznych
Telekomunikacyjny system zasilania gwarantowanego, zintegrowany na napięciu przemiennym 230V AC
 Zakład Systemów Zasilania (Z-5) Telekomunikacyjny system zasilania gwarantowanego, zintegrowany na napięciu przemiennym 23V AC Praca nr 5327 Warszawa grudzień 27 1 Telekomunikacyjny system zasilania gwarantowanego,
Zakład Systemów Zasilania (Z-5) Telekomunikacyjny system zasilania gwarantowanego, zintegrowany na napięciu przemiennym 23V AC Praca nr 5327 Warszawa grudzień 27 1 Telekomunikacyjny system zasilania gwarantowanego,
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu. Jakub Stanisz
 WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA
 WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
SYSTEM BEZPRZEWODOWY RETRANSMITER SYGNAŁÓW
 SYSTEM BEZPRZEWODOWY RETRANSMITER SYGNAŁÓW Instrukcja instalacji RISCO Group Poland ul. 17 Stycznia 56, 02-146 Warszawa tel.: (22) 500-28-40 fax: (22) 500-28-41 1. Wstęp Retransmiter sygnałów przeznaczony
SYSTEM BEZPRZEWODOWY RETRANSMITER SYGNAŁÓW Instrukcja instalacji RISCO Group Poland ul. 17 Stycznia 56, 02-146 Warszawa tel.: (22) 500-28-40 fax: (22) 500-28-41 1. Wstęp Retransmiter sygnałów przeznaczony
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Szerokopasmowy tester telekomunikacyjny MT3000e
 Szerokopasmowy tester telekomunikacyjny MT3000e Tester MT3000e należy do nowej generacji szerokopasmowych testerów telekomunikacyjnych. Jest on idealnie przystosowany do odbiorów i badań sygnałami analogowymi
Szerokopasmowy tester telekomunikacyjny MT3000e Tester MT3000e należy do nowej generacji szerokopasmowych testerów telekomunikacyjnych. Jest on idealnie przystosowany do odbiorów i badań sygnałami analogowymi
Miernik mocy w.cz nadajników RC i FPV 1 MHz 8 GHz
 Miernik mocy w.cz nadajników RC i FPV 1 MHz 8 GHz 1. WSTĘP Miernik mocy w.cz jest ważnym narzędziem pomiarowym każdego użytkownika aparatury RC, w tym LRS czy nadajnika video FPV. Większość sprzętu modelarskiego
Miernik mocy w.cz nadajników RC i FPV 1 MHz 8 GHz 1. WSTĘP Miernik mocy w.cz jest ważnym narzędziem pomiarowym każdego użytkownika aparatury RC, w tym LRS czy nadajnika video FPV. Większość sprzętu modelarskiego
Rys. 1. Schemat ideowy karty przekaźników. AVT 5250 Karta przekaźników z interfejsem Ethernet
 Głównym elementem jest mikrokontroler PIC18F67J60, który oprócz typowych modułów sprzętowych, jak port UART czy interfejs I2C, ma wbudowany kompletny moduł kontrolera Ethernet. Schemat blokowy modułu pokazano
Głównym elementem jest mikrokontroler PIC18F67J60, który oprócz typowych modułów sprzętowych, jak port UART czy interfejs I2C, ma wbudowany kompletny moduł kontrolera Ethernet. Schemat blokowy modułu pokazano
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
rh-serwer Sterownik główny (serwer) systemu F&Home RADIO.
 systemu F&Home RADIO.") 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-serwer Sterownik główny (serwer) systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-serwer Sterownik główny (serwer) systemu F&Home RADIO. 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48
RSD Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle
 Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
MultiTool instrukcja użytkownika 2010 SFAR
 MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
MultiTool instrukcja użytkownika 2010 SFAR Tytuł dokumentu: MultiTool instrukcja użytkownika Wersja dokumentu: V1.0 Data: 21.06.2010 Wersja urządzenia którego dotyczy dokumentacja: MultiTool ver. 1.00
LITEcomp. Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19
 LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
LITEcomp Zestaw uruchomieniowy z mikrokontrolerem ST7FLITE19 Moduł LITEcomp to miniaturowy komputer wykonany na bazie mikrokontrolera z rodziny ST7FLITE1x. Wyposażono go w podstawowe peryferia, dzięki
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja obsługi Loggicar R v1.2. Spis treści
 v1,2 Spis treści Wstęp... 2 Opis działania... 2 Dane techniczne... 2 Parametry toru radiowego... 2 Pierwsze kroki... 4 Uruchomienie... 5 Konfiguracja... 5 Wyświetlacz... 6 Menu... 7 Menu Ustawienia...
v1,2 Spis treści Wstęp... 2 Opis działania... 2 Dane techniczne... 2 Parametry toru radiowego... 2 Pierwsze kroki... 4 Uruchomienie... 5 Konfiguracja... 5 Wyświetlacz... 6 Menu... 7 Menu Ustawienia...
microplc Sposoby monitoringu instalacji technologicznych przy pomocy sterownika
 Sposoby monitoringu instalacji technologicznych przy pomocy sterownika microplc 1 1.WSTĘP 3 2.Łączność za pośrednictwem internetu 4 3.Łączność za pośrednictwem bezprzewodowej sieci WI-FI 5 4.Łączność za
Sposoby monitoringu instalacji technologicznych przy pomocy sterownika microplc 1 1.WSTĘP 3 2.Łączność za pośrednictwem internetu 4 3.Łączność za pośrednictwem bezprzewodowej sieci WI-FI 5 4.Łączność za
Systemy uruchomieniowe
 Systemy uruchomieniowe Przemysław ZAKRZEWSKI Systemy uruchomieniowe (1) 1 Środki wspomagające uruchamianie systemów mikroprocesorowych Symulator mikroprocesora Analizator stanów logicznych Systemy uruchomieniowe:
Systemy uruchomieniowe Przemysław ZAKRZEWSKI Systemy uruchomieniowe (1) 1 Środki wspomagające uruchamianie systemów mikroprocesorowych Symulator mikroprocesora Analizator stanów logicznych Systemy uruchomieniowe:
Instrukcja obsługi Zasilacz regulowany WINNERS XL4015 USB
 Instrukcja obsługi Zasilacz regulowany WINNERS XL4015 USB Moduł przetwornicy regulowanej WINNERS XL4015 USB może zostać użyty jako standardowy układ obniżający napięcie stałe DC, ładowarka akumulatorów
Instrukcja obsługi Zasilacz regulowany WINNERS XL4015 USB Moduł przetwornicy regulowanej WINNERS XL4015 USB może zostać użyty jako standardowy układ obniżający napięcie stałe DC, ładowarka akumulatorów
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP
 Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
Zestaw uruchomieniowy z mikrokontrolerem LPC1114 i wbudowanym programatorem ISP ZL32ARM ZL32ARM z mikrokontrolerem LPC1114 (rdzeń Cotrex-M0) dzięki wbudowanemu programatorowi jest kompletnym zestawem uruchomieniowym.
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC") 1 ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami mikrokontrolerów PIC. Jest on przystosowany do współpracy z mikrokontrolerami
1 ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami mikrokontrolerów PIC. Jest on przystosowany do współpracy z mikrokontrolerami
e-smart Home oznacza większe bezpieczeństwo i bardziej efektywne wykorzystanie energii.
 e-smart Home oznacza większe bezpieczeństwo i bardziej efektywne wykorzystanie energii. Wykorzystanie zdalnie sterowanych urządzeń i zautomatyzowanych procedur zwiększa jakość życia w pomieszczeniach mieszkalnych
e-smart Home oznacza większe bezpieczeństwo i bardziej efektywne wykorzystanie energii. Wykorzystanie zdalnie sterowanych urządzeń i zautomatyzowanych procedur zwiększa jakość życia w pomieszczeniach mieszkalnych
ZL27ARM. Zestaw uruchomieniowy dla mikrokontrolerów STM32F103
 ZL27ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL27ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę zaawansowanych układów
ZL27ARM Zestaw uruchomieniowy dla mikrokontrolerów STM32F103 Zestaw ZL27ARM jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów STM32F103. Dzięki wyposażeniu w szeroką gamę zaawansowanych układów
Instrukcja obsługi. Centrala radiowa NETINO NRU-01. v r.
 Instrukcja obsługi Centrala radiowa NETINO NRU-01 v.01 01.02.2016r. Spis treści: Przeznaczenie... 2 Części składowe... 2 Dane techniczne... 2 Parametry toru radiowego... 2 Opis wyprowadzeń... 3 Uruchomienie
Instrukcja obsługi Centrala radiowa NETINO NRU-01 v.01 01.02.2016r. Spis treści: Przeznaczenie... 2 Części składowe... 2 Dane techniczne... 2 Parametry toru radiowego... 2 Opis wyprowadzeń... 3 Uruchomienie
Instrukcja ogólna EvoPIR bezprzewodowa czujka ruchu
 Instrukcja ogólna EvoPIR bezprzewodowa czujka ruchu Przed przystąpieniem do montażu urządzenia, należy dokładnie zapoznać się z treścią instrukcji instalacji! Instrukcja EVOPIR Rev. 1.0. 2017 Genevo sp.
Instrukcja ogólna EvoPIR bezprzewodowa czujka ruchu Przed przystąpieniem do montażu urządzenia, należy dokładnie zapoznać się z treścią instrukcji instalacji! Instrukcja EVOPIR Rev. 1.0. 2017 Genevo sp.
Instrukcja obsługi rejestratora SAV35 wersja 10
 Strona 1 z 7 1. OPIS REJESTRATORA SAV35 wersja 10. Rejestrator SAV35 umożliwia pomiar, przesłanie do komputera oraz zapamiętanie w wewnętrznej pamięci przyrządu wartości chwilowych lub średnich pomierzonych
Strona 1 z 7 1. OPIS REJESTRATORA SAV35 wersja 10. Rejestrator SAV35 umożliwia pomiar, przesłanie do komputera oraz zapamiętanie w wewnętrznej pamięci przyrządu wartości chwilowych lub średnich pomierzonych
Nadajnik radiowy TA105
 Nadajnik radiowy TA105 TA105 jest wysokiej klasy uniwersalnym nadajnikiem zaprojektowanym do pracy w szerokim zakresie temperatury w sieciach monitoringu radiowego systemów alarmowych. Zaprojektowany i
Nadajnik radiowy TA105 TA105 jest wysokiej klasy uniwersalnym nadajnikiem zaprojektowanym do pracy w szerokim zakresie temperatury w sieciach monitoringu radiowego systemów alarmowych. Zaprojektowany i
ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]
![ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]](/thumbs/92/108907590.jpg "ZL25ARM. Płyta bazowa dla modułów diparm z mikrokontrolerami STR912. [rdzeń ARM966E-S]") ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
ZL25ARM Płyta bazowa dla modułów diparm z mikrokontrolerami STR912 [rdzeń ARM966E-S] ZL25ARM to płyta bazowa umożliwiająca wykonywanie różnorodnych eksperymentów z mikrokontrolerami STR912 (ARM966E-S).
KAmduino UNO. Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO
 Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
Płytka rozwojowa z mikrokontrolerem ATmega328P, kompatybilna z Arduino UNO to płytka rozwojowa o funkcjonalności i wymiarach typowych dla Arduino UNO. Dzięki wbudowanemu mikrokontrolerowi ATmega328P i
Zestaw Startowy EvB. Więcej informacji na stronie: http://and-tech.pl/zestaw-evb-5-1/
 Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
ZL1MSP430 Zestaw startowy dla mikrokontrolerów MSP430F11xx/11xxA ZL1MSP430
 ZL1MSP430 Zestaw startowy dla mikrokontrolerów MSP430F11xx/11xxA ZL1MSP430 Zestaw startowy dla mikrokontrolerów MSP430F11xx/11xxA Mikrokontrolery z rodziny MSP430 słyną z niewielkiego poboru mocy i możliwości
ZL1MSP430 Zestaw startowy dla mikrokontrolerów MSP430F11xx/11xxA ZL1MSP430 Zestaw startowy dla mikrokontrolerów MSP430F11xx/11xxA Mikrokontrolery z rodziny MSP430 słyną z niewielkiego poboru mocy i możliwości
Moduł konwertera RS-232/LON
 Kanał transmisji szeregowej RS-232/RS-485 z protokołem MODBUS, M-BUS lub innym, wybranym przez użytkownika Zegar czasu rzeczywistego i pamięć z podtrzymywaniem bateryjnym (opcja) Praca w sieci LonWorks
Kanał transmisji szeregowej RS-232/RS-485 z protokołem MODBUS, M-BUS lub innym, wybranym przez użytkownika Zegar czasu rzeczywistego i pamięć z podtrzymywaniem bateryjnym (opcja) Praca w sieci LonWorks
Płyta uruchomieniowa EBX51
 Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
Dariusz Kozak ZESTAW URUCHOMIENIOWY MIKROKOMPUTERÓW JEDNOUKŁADOWYCH MCS-51 ZUX51 Płyta uruchomieniowa EBX51 INSTRUKCJA OBSŁUGI Wszystkie prawa zastrzeżone Kopiowanie, powielanie i rozpowszechnianie w jakiejkolwiek
Instrukcja użytkownika ARSoft-WZ1
 05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
INTERFEJS SYSTEMU TRANSMISJI ALARMÓW
 STEKOP SA Zakład Pracy Chronionej 15-404 Białystok, ul. Młynowa 21 tel./fax : (+48 85) 7420039, 7423567 http://www.stekop.com INTERFEJS SYSTEMU TRANSMISJI ALARMÓW typ RDC 400 ver. 1 Instrukcja użytkownika
STEKOP SA Zakład Pracy Chronionej 15-404 Białystok, ul. Młynowa 21 tel./fax : (+48 85) 7420039, 7423567 http://www.stekop.com INTERFEJS SYSTEMU TRANSMISJI ALARMÓW typ RDC 400 ver. 1 Instrukcja użytkownika
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
Parametryzacja przetworników analogowocyfrowych
 Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
ZL4PIC. Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC
 ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
ZL4PIC uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC (v.1.0) ZL4PIC Uniwersalny zestaw uruchomieniowy dla mikrokontrolerów PIC 1 Zestaw jest przeznaczony dla elektroników zajmujących się aplikacjami
Zdalny czujnik. Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009
 Wrocław, 12 czerwca 2009") Zdalny czujnik Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009 Dokument został stworzony w ramach kursu Wizualizacja danych sensorycznych, prowadzonego przez dra inż. Bogdana
Zdalny czujnik Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009 Dokument został stworzony w ramach kursu Wizualizacja danych sensorycznych, prowadzonego przez dra inż. Bogdana
Przełącznik KVM USB. Przełącznik KVM USB z obsługą sygnału audio i 2 portami. Przełącznik KVM USB z obsługą sygnału audio i 4 portami
 Przełącznik KVM USB Przełącznik KVM USB z obsługą sygnału audio i 2 portami Przełącznik KVM USB z obsługą sygnału audio i 4 portami Instrukcja obsługi DS-11403 (2 porty) DS-12402 (4 porty) 1 UWAGA Urządzenie
Przełącznik KVM USB Przełącznik KVM USB z obsługą sygnału audio i 2 portami Przełącznik KVM USB z obsługą sygnału audio i 4 portami Instrukcja obsługi DS-11403 (2 porty) DS-12402 (4 porty) 1 UWAGA Urządzenie
MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY
 MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY 8 wejść analogowych Dotykowy wyświetlacz LCD Wewnętrzna pamięć danych 2 GB Port USB na płycie czołowej Port komunikacyjny RS-485 Wewnętrzne zasilanie akumulatorowe,
MPI-8E 8-KANAŁOWY REJESTRATOR PRZENOŚNY 8 wejść analogowych Dotykowy wyświetlacz LCD Wewnętrzna pamięć danych 2 GB Port USB na płycie czołowej Port komunikacyjny RS-485 Wewnętrzne zasilanie akumulatorowe,
LITEcompLPC1114. Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Sponsorzy:
 Sponsorzy:") LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
LITEcompLPC1114 Zestaw ewaluacyjny z mikrokontrolerem LPC1114 (Cortex-M0) Bezpłatny zestaw dla Czytelników książki Mikrokontrolery LPC1100. Pierwsze kroki LITEcompLPC1114 jest doskonałą platformą mikrokontrolerową
KAmduino UNO. Rev Źródło:
 KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
KAmduino UNO Rev. 20170811113756 Źródło: http://wiki.kamami.pl/index.php?title=kamduino_uno Spis treści Podstawowe cechy i parametry... 2 Wyposażenie standardowe... 3 Schemat elektryczny... 4 Mikrokontroler
Rejestratory Sił, Naprężeń.
 JAS Projektowanie Systemów Komputerowych Rejestratory Sił, Naprężeń. 2012-01-04 2 Zawartość Typy rejestratorów.... 4 Tryby pracy.... 4 Obsługa programu.... 5 Menu główne programu.... 7 Pliki.... 7 Typ
JAS Projektowanie Systemów Komputerowych Rejestratory Sił, Naprężeń. 2012-01-04 2 Zawartość Typy rejestratorów.... 4 Tryby pracy.... 4 Obsługa programu.... 5 Menu główne programu.... 7 Pliki.... 7 Typ
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury. Czujniki stacjonarne.
 Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Radio kuchenne Soundmaster DAB 2035, FM, RDS, srebrne
 INSTRUKCJA OBSŁUGI Radio kuchenne Soundmaster DAB 2035, FM, RDS, srebrne Nr produktu 352353 Strona 1 z 13 Radio kuchenne DAB2035 PLL 1. Ogólny opis - Pasmo DAB + / FM - Zapewniona nazwa stacji radiowej
INSTRUKCJA OBSŁUGI Radio kuchenne Soundmaster DAB 2035, FM, RDS, srebrne Nr produktu 352353 Strona 1 z 13 Radio kuchenne DAB2035 PLL 1. Ogólny opis - Pasmo DAB + / FM - Zapewniona nazwa stacji radiowej
ODBIORNIK RADIOPOWIADAMIANIA PRACA ALARM CIĄGŁY ALARM IMPULSOWY SERWIS ALARM SIEĆ NAUKA BATERIA RESET WYJŚCIE OC +12V SAB
 ODBIORNIK RADIOPOWIADAMIANIA typ ORP K1 gniazdo antenowe typ BNC 50 Ohm buzer PRACA SERWIS CIĄGŁY IMPULSOWY przełącznik sygnalizatora wewnętrznego alarm potencjometr zasilania z sieci zasilania akumulat.
ODBIORNIK RADIOPOWIADAMIANIA typ ORP K1 gniazdo antenowe typ BNC 50 Ohm buzer PRACA SERWIS CIĄGŁY IMPULSOWY przełącznik sygnalizatora wewnętrznego alarm potencjometr zasilania z sieci zasilania akumulat.
ZL2AVR. Zestaw uruchomieniowy z mikrokontrolerem ATmega8
 ZL2AVR Zestaw uruchomieniowy z mikrokontrolerem ATmega8 ZL2AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega8 (oraz innych w obudowie 28-wyprowadzeniowej). Dzięki wyposażeniu w
ZL2AVR Zestaw uruchomieniowy z mikrokontrolerem ATmega8 ZL2AVR jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów ATmega8 (oraz innych w obudowie 28-wyprowadzeniowej). Dzięki wyposażeniu w
INSTRUKCJA MONTAŻU. Termostat radiowy z LCD 868MHz RD50112CF Control
 INSTRUKCJA MONTAŻU Termostat radiowy z LCD 868MHz RD50112CF Control 1 Warunki zastosowania Zawartość Opis produktu 3 Zakres dostawy 3 Informacja o wyrobie 4 Zakres zastosowań 4 Opis 5 Dane techniczne 6
INSTRUKCJA MONTAŻU Termostat radiowy z LCD 868MHz RD50112CF Control 1 Warunki zastosowania Zawartość Opis produktu 3 Zakres dostawy 3 Informacja o wyrobie 4 Zakres zastosowań 4 Opis 5 Dane techniczne 6