Przenośnik wibracyjny. Przenośnik wibracyjny. Dr inż. Piotr Kulinowski. tel. (617) B-2 parter p.6
|
|
|
- Jacek Juliusz Jakubowski
- 7 lat temu
- Przeglądów:
Transkrypt
 30 74 B- parter p.6 konsultacje: poniedziałek 11.00-1.")
1 Przenośnik wibracyjny Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik wibracyjny Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (617) B- parter p.6 konsultacje: poniedziałek

2 Budowa 1 Elementami składowymi przenośnika wibracyjnego są: wibrator, rynna, elementy sprężyste podparcia, bądź podwieszenia rynny.

3 Budowa Elementami składowymi przenośnika wibracyjnego są: wibrator, rynna, elementy sprężyste podparcia, bądź podwieszenia rynny.
4 Zasada działania Materiał znajdujący się na rynnie przenośnika wibracyjnego, poddanej prostoliniowym drganiom harmonicznym na kierunku nachylonym względem jej osi pod kątem prostym, wskutek tych drgań jest okresowo podrzucany pod działaniem siły bezwładności i przez to przemieszczany wzdłuż rynny. Rynna, której ślad pionowy R jest nachylony względem poziomu pod kątem α,, wykonuje drgania harmoniczne o częstotliwości n i amplitudzie A na kierunku nachylonym do płaszczyzny R pod kątem β.. Drgania rynny można rozłożyć na składowe: styczne (wzdłuż osi Ox) ) oraz normalne (wzdłuż osi Oy).
5 Rozkład drgań rynny przenośnika wibracyjnego - składowe styczne i normalne do powierzchni y β y = A sinβ sin(πnt) A A R α x Asinβ t x = A cosβ Acosβ sin(πnt) t t A
6 Równania ruchu rynny n -częstotliwość drgań rynny równa częstotliwości zmian siły wymuszającej wibratora, [Hz], A - amplituda drgań rynny [m], α -kąt nachylenia rynny przenośnika względem poziomu, β -kąt nachylenia kierunku drgań względem powierzchni rynny, B -siła bezwładności G -siła ciężkości y = A sinβ sin(πnt) normalna składowa przemieszczenia rynny y = πn A sinβ cos(πnt) normalna składowa prędkości rynny y = 4π n A sinβ sin( π nt) normalna składowa przyspieszenia rynny
7 Układ sił działających na ziarno transportowanego materiału znajdujące się na powierzchni rynny B = G 4π g n A sin ( πnt) Bsinβ β B α G Gcosα G cos α = B sinβ g cosα = 4π n A sinβ sin ( π ) n t K = 4π n A sinβ g cos α współczynnik podrzutu K > 1 przenośnik wibracyjny K < 1 przenośnik wstrząsany
8 Fazy ruchu 1 y T t t 3 t ẏ.. y t gcosα t
9 Fazy ruchu W ruchu ciała po rynnie przenośnika wibracyjnego można wyróżnić następujące fazy: 1. ciało pozostaje nieruchome względem rynny i przemieszcza się wraz z nią,. w drugiej fazie siła tarcia między ciałem a rynną staje się mniejsza od siły bezwładności i ulega ono poślizgowi po powierzchni rynny, 3. w fazie trzeciej składowa normalna przyspieszenia rynny staje się większa od składowej normalnej przyspieszenia ziemskiego, nacisk ciała na rynnę maleje do zera i zaczyna ono lecieć swobodnie nad rynną; ta faza ma decydujący wpływ na przemieszczenie (prędkość) ziarna względem rynny, 4. czwarta faza następuje od chwili upadku ciała na rynnę i przez kolejne odbicia i poślizgi wyrównuje swoją prędkość do prędkości ruchu rynny.
10 Współczynnik m y T t t 3 -t t 3 -t t 3 -t T T T p=1 p= p=3 t = 1 πn arc sin 1 K t3 t m = = n(t 3 t ) T t 3 = m n + 1 πn arc sin 1 K
11 Wyznaczenie wsp. m K = f(m) K = cosπm + π m 1 m sin m π π K 6.0 Długość drogi lotu ziarna [m] gm sl = n (cosαctgβ sinα) 4.0 K = p = 1 m Średnia prędkość transportowania [m/s] v t sl = ξ = ξ pt gm pn (cos αctgβ sin α) ξ współczynnik uwzględniający takie zjawiska jak: poślizgi materiału, nierównomierna prędkość materiału na różnych głębokościach warstwy, opory powietrza itp. / /
12 Napędy przenośników wibracyjnych - wibratory Wibratory wymuszają drgania rynny i w zależności od budowy i sposobu działania dzielą się na następujące zasadnicze grupy: wibratory mimoosiowe,, które wymuszają drgania o amplitudzie zależnej od rozmiarów mechanizmu mimoosiowego, a siła wymuszająca zależy od wielkości masy pobudzanej do drgań i stałej sprężystości elementów zawieszenia rynny; wibratory bezwładnościowe (masowe), w których siłą wymuszającą drgania jest siła odśrodkowa masy wirującej dookoła osi nie przechodzącej przez jej środek ciężkości; wibratory reakcyjne, w których siłą wymuszającą jest reakcja masy wprawianej w ruch postępowy; wibratory ciśnieniowe,, w których siłę wymuszającą daje ciśnienie medium (najczęściej powietrze), działające na powierzchnię elementu połączonego z masa pobudzana do drgań.
13 Schemat napędu kinematycznego kierunek drgań rynna silnik 1 korba łącznik Częstotliwość drgań wibratorów mimoosiowych można zmieniać przez zmianę prędkości obrotowej silnika napędowego. Wibratory mimoosiowe są stosowane w napędach stosunkowo długich przenośników (nawet do 30 m) pracujących przy niskich częstotliwościach ( obr/min.) i przy odpowiednio dużych amplitudach.
14 Wibrator inercyjny 1 O oś obrotu S środek masy niewyważonej Zaletą wibratorów bezwładnościowych jest możliwość uzyskiwania stosunkowo dużych sił wymuszających i dużych mocy przy małych rozmiarach i masach; natomiast ich wadą dość długi czas rozruchu i zatrzymania. Wibratory bezwładnościowe stosuje się do napędu przenośników o średniej częstotliwości drgań/ min.


15 Wibrator inercyjny wibrator z przekładnią synchronizującą


16 Wibrator elektromagnetyczny 1 masa reaktywna zwora 3 sprężyny 4 masa regulowana

17 Wibrator pneumatyczny 1 zwężka przestrzeń cylindryczna 3 kula 4 otwory O - oś
18 Rynny Rynny przenośników wibracyjnych powinny mieć konstrukcję lekką i sztywną (by jej robocze drgania wymuszone nie były zniekształcane drganiami giętnymi) oraz zapewniającą osiąganie dużej wydajności i przekazywanie ruchu transportowanemu materiałowi. By rynna przenośnika nie wpadała w rezonans, jej częstotliwość drgań własnych musi być większa od częstotliwości drgań wibratora. Stosuje się rynny - łączone ze sobą sztywno - o nie płaskim przekroju (szerokości mm i długości ciągu rynien m) oraz rurowe o średnicy mm. Rynny są budowane jako proste i śrubowe. Rynny proste mogą być przedzielone przegrodami wzdłużnymi pozwalając na transport różnych materiałów. Rynny śrubowe pozwalają na transport pionowy po linii śrubowej.
19 Zastosowania 1 Zastosowanie przenośników wibracyjnych mimo ich niezbyt wysokich parametrów pracy jest szerokie dzięki wielu zaletom - takim jak: niska energochłonność, cicha praca, łatwość automatyzacji, możliwość równoczesnego transportowania różnych materiałów, także w podwyższonych temperaturach Są one stosowane w - górnictwie, - hutnictwie, - budownictwie, - w elektrowniach - oraz w przemysłach: chemicznym, cementowym, ceramicznym, maszynowym, spożywczym i wielu innych.

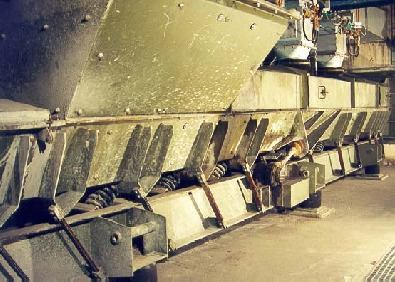


20 Zastosowania
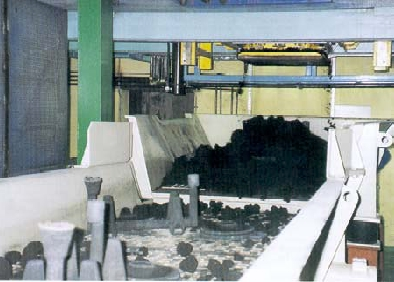


21 Zastosowania 3


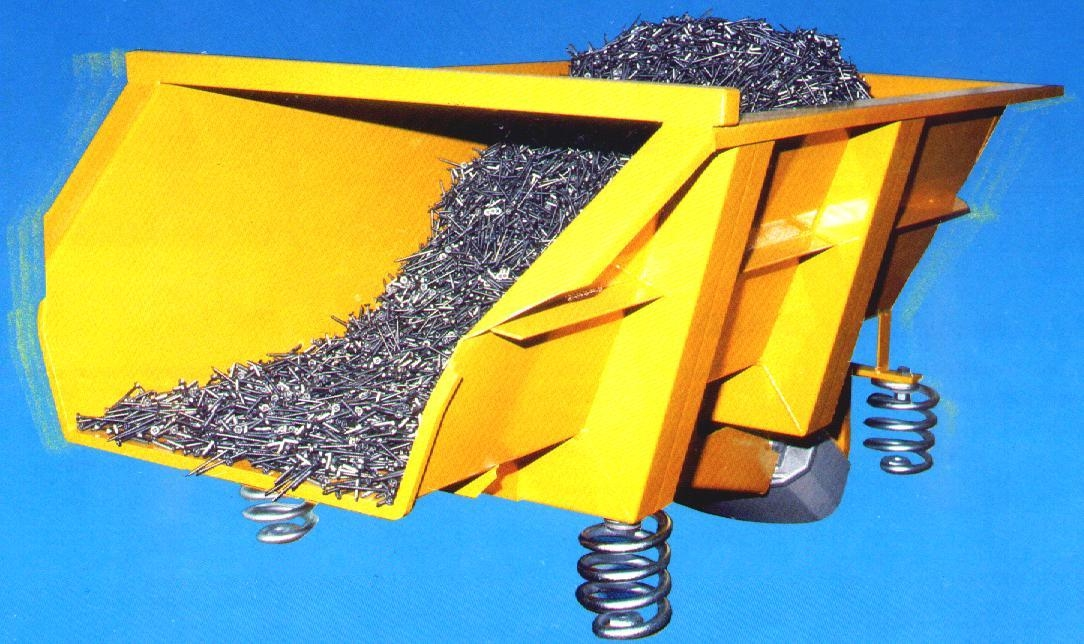

22 Zastosowania 4
Przenośnik wibracyjny
 Przenośniki wsrząsowe Kaedra Maszyn Górniczych, Przeróbczych i Transporowych AGH Przenośnik wibracyjny Dr inż. Pior Kulinowski pk@imir.agh.edu.pl el. (1617) 30 74 B- parer p.6 konsulacje: poniedziałek
Przenośniki wsrząsowe Kaedra Maszyn Górniczych, Przeróbczych i Transporowych AGH Przenośnik wibracyjny Dr inż. Pior Kulinowski pk@imir.agh.edu.pl el. (1617) 30 74 B- parer p.6 konsulacje: poniedziałek
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO LABORATORIUM Badania wydajności przenośników bezcięgnowych
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT SPECJALNOŚĆ: SYSTEMY I URZĄDZENIA TRANSPORTOWE PRZEDMIOT: SYSTEMU I URZĄDZENIA TRANSPORTU BLISKIEGO LABORATORIUM Badania wydajności przenośników bezcięgnowych
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO
 BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
BADANIE ZJAWISK PRZEMIESZCZANIA WSTRZĄSOWEGO 1. Cel ćwiczenia Celem ćwiczenia jest poznanie kinematyki i dynamiki ruchu w procesie przemieszczania wstrząsowego oraz wyznaczenie charakterystyki użytkowej
Przenośnik zgrzebłowy - obliczenia
 Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Przenośnik wibracyjny
 Przenośniki wsrząsowe Kaedra Maszn Górniczch, Przenośnik wibracjn Dr inŝ. Pior Kulinowski pk@imir.agh.edu.pl el. (1617) 30 74 B- parer p.6 konsulacje: poniedziałek 11.00-1.00 Budowa 1 Elemenami składowmi
Przenośniki wsrząsowe Kaedra Maszn Górniczch, Przenośnik wibracjn Dr inŝ. Pior Kulinowski pk@imir.agh.edu.pl el. (1617) 30 74 B- parer p.6 konsulacje: poniedziałek 11.00-1.00 Budowa 1 Elemenami składowmi
RUCH HARMONICZNY. sin. (r.j.o) sin
 sin") RUCH DRGAJĄCY Ruch harmoniczny Rodzaje drgań Oscylator harmoniczny Energia oscylatora harmonicznego Wahadło matematyczne i fizyczne Drgania tłumione Drgania wymuszone i zjawisko rezonansu Politechnika
RUCH DRGAJĄCY Ruch harmoniczny Rodzaje drgań Oscylator harmoniczny Energia oscylatora harmonicznego Wahadło matematyczne i fizyczne Drgania tłumione Drgania wymuszone i zjawisko rezonansu Politechnika
Przenośniki Układy napędowe
 Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
MECHANIKA 2. Drgania punktu materialnego. Wykład Nr 8. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły.
 PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
PRACA Pracą mechaniczną nazywamy iloczyn wartości siły i wartości przemieszczenia, które nastąpiło zgodnie ze zwrotem działającej siły. Pracę oznaczamy literą W Pracę obliczamy ze wzoru: W = F s W praca;
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Podstawy fizyki sezon 1 VII. Ruch drgający
 Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
Podstawy fizyki sezon 1 VII. Ruch drgający Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Ruch skutkiem działania
Fizyka 11. Janusz Andrzejewski
 Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Bryła sztywna Zadanie domowe
 Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Bryła sztywna Zadanie domowe 1. Podczas ruszania samochodu, w pewnej chwili prędkość środka przedniego koła wynosiła. Sprawdź, czy pomiędzy kołem a podłożem występował poślizg, jeżeli średnica tego koła
Ruch drgający. Ruch harmoniczny prosty, tłumiony i wymuszony
 Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
RUCH DRGAJĄCY RZESZOTA PRZESIEWACZA DWUCZĘSTOŚCIOWEGO**
 Górnictwo i Geoinżynieria Rok 34 Zeszyt 4/1 2010 Remigiusz Modrzewski*, Piotr Wodziński* RUCH DRGAJĄCY RZESZOTA PRZESIEWACZA DWUCZĘSTOŚCIOWEGO** 1. Wstęp Przesiewacz dwuczęstościowy zbudowany jest z dwóch
Górnictwo i Geoinżynieria Rok 34 Zeszyt 4/1 2010 Remigiusz Modrzewski*, Piotr Wodziński* RUCH DRGAJĄCY RZESZOTA PRZESIEWACZA DWUCZĘSTOŚCIOWEGO** 1. Wstęp Przesiewacz dwuczęstościowy zbudowany jest z dwóch
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Rodzaje fal. 1. Fale mechaniczne. 2. Fale elektromagnetyczne. 3. Fale materii. dyfrakcja elektronów
 Wykład VI Fale t t + Dt Rodzaje fal 1. Fale mechaniczne 2. Fale elektromagnetyczne 3. Fale materii dyfrakcja elektronów Fala podłużna v Przemieszczenia elementów spirali ( w prawo i w lewo) są równoległe
Wykład VI Fale t t + Dt Rodzaje fal 1. Fale mechaniczne 2. Fale elektromagnetyczne 3. Fale materii dyfrakcja elektronów Fala podłużna v Przemieszczenia elementów spirali ( w prawo i w lewo) są równoległe
Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne.
 PRACA Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne. Rozważmy sytuację, gdy w krótkim czasie działająca siła spowodowała przemieszczenie ciała o bardzo małą wielkość Δs Wtedy praca wykonana
PRACA Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne. Rozważmy sytuację, gdy w krótkim czasie działająca siła spowodowała przemieszczenie ciała o bardzo małą wielkość Δs Wtedy praca wykonana
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Wykład FIZYKA I. 3. Dynamika punktu materialnego. Dr hab. inż. Władysław Artur Woźniak
 Wykład IZYKA I 3. Dynamika punktu materialnego Dr hab. inż. Władysław Artur Woźniak Instytut izyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html Dynamika to dział mechaniki,
Wykład IZYKA I 3. Dynamika punktu materialnego Dr hab. inż. Władysław Artur Woźniak Instytut izyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html Dynamika to dział mechaniki,
Przenośniki i dozowniki ciał sypkich.
 Przenośniki i dozowniki ciał sypkich. Transport w zakładach chemicznych możemy podzielić na: transport zewnętrzny transport wewnętrzny Na terenie zakładu w ramach transportu wewnętrznego rozróżniamy: dźwignice
Przenośniki i dozowniki ciał sypkich. Transport w zakładach chemicznych możemy podzielić na: transport zewnętrzny transport wewnętrzny Na terenie zakładu w ramach transportu wewnętrznego rozróżniamy: dźwignice
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Przepływy laminarne - zadania
 Zadanie 1 Warstwa cieczy o wysokości = 3mm i lepkości v = 1,5 10 m /s płynie równomiernie pod działaniem siły ciężkości po płaszczyźnie nachylonej do poziomu pod kątem α = 15. Wyznaczyć: a) Rozkład prędkości.
Zadanie 1 Warstwa cieczy o wysokości = 3mm i lepkości v = 1,5 10 m /s płynie równomiernie pod działaniem siły ciężkości po płaszczyźnie nachylonej do poziomu pod kątem α = 15. Wyznaczyć: a) Rozkład prędkości.
Równania różniczkowe opisujące ruch fotela z pilotem:
 . Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
. Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
Fal podłużna. Polaryzacja fali podłużnej
 Fala dźwiękowa Podział fal Fala oznacza energię wypełniającą pewien obszar w przestrzeni. Wyróżniamy trzy główne rodzaje fal: Mechaniczne najbardziej znane, typowe przykłady to fale na wodzie czy fale
Fala dźwiękowa Podział fal Fala oznacza energię wypełniającą pewien obszar w przestrzeni. Wyróżniamy trzy główne rodzaje fal: Mechaniczne najbardziej znane, typowe przykłady to fale na wodzie czy fale
Zasady i kryteria zaliczenia: Zaliczenie pisemne w formie pytań opisowych, testowych i rachunkowych.
 Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Przenośniki wałkowe. Dr inż. Piotr Kulinowski. piotr.kulinowski@agh.edu.pl tel. (12617) 30 92 B-2 parter p.6
 30 92 B-2 parter p.6") Przenośniki wałkowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki wałkowe Dr inż. Piotr Kulinowski piotr.kulinowski@agh.edu.pl tel. (12617) 30 92 B-2 parter p.6 konsultacje:
Przenośniki wałkowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki wałkowe Dr inż. Piotr Kulinowski piotr.kulinowski@agh.edu.pl tel. (12617) 30 92 B-2 parter p.6 konsultacje:
ZAWIESZENIA WIBRACYJNE
 ZAWIESZENIA WIBRACYJNE TECHNIKA PRZENIESIENIA NAPĘDU PRZESIEWACZE I PODAJNIKI WIBRACYJNEINFORMACJE TECHNICZNE UKŁADY SWOBODNIE OSCYLUJĄCE Elementy elastyczne firmy Elsitec mogą być używane jako izolator
ZAWIESZENIA WIBRACYJNE TECHNIKA PRZENIESIENIA NAPĘDU PRZESIEWACZE I PODAJNIKI WIBRACYJNEINFORMACJE TECHNICZNE UKŁADY SWOBODNIE OSCYLUJĄCE Elementy elastyczne firmy Elsitec mogą być używane jako izolator
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
Przenośnik wstrząsany
 Przenośniki wstrząsowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośnik wstrząsany Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje: poniedziałek
Przenośniki wstrząsowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośnik wstrząsany Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje: poniedziałek
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5
 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
Blok 2: Zależność funkcyjna wielkości fizycznych. Rzuty
 Blok : Zależność funkcyjna wielkości fizycznych. Rzuty ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przeanalizuj wykresy zaprezentowane na rysunkach. Załóż, żę w każdym przypadku ciało poruszało się zgodnie ze
Blok : Zależność funkcyjna wielkości fizycznych. Rzuty ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przeanalizuj wykresy zaprezentowane na rysunkach. Załóż, żę w każdym przypadku ciało poruszało się zgodnie ze
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Drania i fale. Przykład drgań. Drgająca linijka, ciało zawieszone na sprężynie, wahadło matematyczne.
 Drania i fale 1. Drgania W ruchu drgającym ciało wychyla się okresowo w jedną i w drugą stronę od położenia równowagi (cykliczna zmiana). W położeniu równowagi siły działające na ciało równoważą się. Przykład
Drania i fale 1. Drgania W ruchu drgającym ciało wychyla się okresowo w jedną i w drugą stronę od położenia równowagi (cykliczna zmiana). W położeniu równowagi siły działające na ciało równoważą się. Przykład
INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7
 Przedmiot : OBRÓBKA SKRAWANIEM I NARZĘDZIA Temat: Szlifowanie cz. II. KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7 Kierunek: Mechanika i Budowa Maszyn
Przedmiot : OBRÓBKA SKRAWANIEM I NARZĘDZIA Temat: Szlifowanie cz. II. KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7 Kierunek: Mechanika i Budowa Maszyn
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY. 1. Cel ćwiczenia
 Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
Ćwiczenie 6 IZOLACJA DRGAŃ MASZYNY 1. Cel ćwiczenia Przeprowadzenie izolacji drgań przekładni zębatej oraz doświadczalne wyznaczenie współczynnika przenoszenia drgań urządzenia na fundament.. Wprowadzenie
Ruch drgający i falowy
 Ruch drgający i falowy 1. Ruch harmoniczny 1.1. Pojęcie ruchu harmonicznego Jednym z najbardziej rozpowszechnionych ruchów w mechanice jest ruch ciała drgającego. Przykładem takiego ruchu może być ruch
Ruch drgający i falowy 1. Ruch harmoniczny 1.1. Pojęcie ruchu harmonicznego Jednym z najbardziej rozpowszechnionych ruchów w mechanice jest ruch ciała drgającego. Przykładem takiego ruchu może być ruch
Drgania - zadanka. (b) wyznacz maksymalne położenie, prędkość i przyspieszenie ciała,
 wyznacz maksymalne położenie, prędkość i przyspieszenie ciała,") Zadania do przeliczenia na lekcji. Drgania - zadanka 1. Ciało o masie m = 0.5kg zawieszono na nieważkiej nitce o długości l = 1m a następne wychylono o 2cm z położenia równowagi (g = 10 m s 2), (a) oblicz
Zadania do przeliczenia na lekcji. Drgania - zadanka 1. Ciało o masie m = 0.5kg zawieszono na nieważkiej nitce o długości l = 1m a następne wychylono o 2cm z położenia równowagi (g = 10 m s 2), (a) oblicz
Podstawy Procesów i Konstrukcji Inżynierskich. Praca, moc, energia INZYNIERIAMATERIALOWAPL. Kierunek Wyróżniony przez PKA
 Podstawy Procesów i Konstrukcji Inżynierskich Praca, moc, energia Energia Energia jest to wielkość skalarna, charakteryzująca stan, w jakim znajduje się jedno lub wiele ciał. Energia jest miarą różnych
Podstawy Procesów i Konstrukcji Inżynierskich Praca, moc, energia Energia Energia jest to wielkość skalarna, charakteryzująca stan, w jakim znajduje się jedno lub wiele ciał. Energia jest miarą różnych
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
DRGANIA MECHANICZNE. Poniższe materiały tylko dla studentów uczęszczających na zajęcia. Zakaz rozpowszechniania i powielania bez zgody autora.
 DRGANIA MECHANICZNE materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak część 3 drgania wymuszone siłą harmoniczną drgania
DRGANIA MECHANICZNE materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak część 3 drgania wymuszone siłą harmoniczną drgania
18. Siły bezwładności Siła bezwładności w ruchu postępowych Siła odśrodkowa bezwładności Siła Coriolisa
 Kinematyka 1. Podstawowe własności wektorów 5 1.1 Dodawanie (składanie) wektorów 7 1.2 Odejmowanie wektorów 7 1.3 Mnożenie wektorów przez liczbę 7 1.4 Wersor 9 1.5 Rzut wektora 9 1.6 Iloczyn skalarny wektorów
Kinematyka 1. Podstawowe własności wektorów 5 1.1 Dodawanie (składanie) wektorów 7 1.2 Odejmowanie wektorów 7 1.3 Mnożenie wektorów przez liczbę 7 1.4 Wersor 9 1.5 Rzut wektora 9 1.6 Iloczyn skalarny wektorów
Drgania i fale II rok Fizyk BC
 00--07 5:34 00\FIN00\Drgzlo00.doc Drgania złożone Zasada superpozycji: wychylenie jest sumą wychyleń wywołanych przez poszczególne czynniki osobno. Zasada wynika z liniowości związku między wychyleniem
00--07 5:34 00\FIN00\Drgzlo00.doc Drgania złożone Zasada superpozycji: wychylenie jest sumą wychyleń wywołanych przez poszczególne czynniki osobno. Zasada wynika z liniowości związku między wychyleniem
m Jeżeli do końca naciągniętej (ściśniętej) sprężyny przymocujemy ciało o masie m., to będzie na nie działała siła (III zasada dynamiki):
 sprężyny przymocujemy ciało o masie m., to będzie na nie działała siła (III zasada dynamiki):") Ruch drgający -. Ruch drgający Ciało jest sprężyste, jeżei odzyskuje pierwotny kształt po ustaniu działania siły, która ten kształt zmieniła. Właściwość sprężystości jest ograniczona, to znaczy, że przy
Ruch drgający -. Ruch drgający Ciało jest sprężyste, jeżei odzyskuje pierwotny kształt po ustaniu działania siły, która ten kształt zmieniła. Właściwość sprężystości jest ograniczona, to znaczy, że przy
Z-ETI-1027 Mechanika techniczna II Technical mechanics II. Stacjonarne. Katedra Inżynierii Produkcji Dr inż. Stanisław Wójcik
 Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
TEORIA DRGAŃ Program wykładu 2016
 TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia.
 Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
3 Podstawy teorii drgań układów o skupionych masach
 3 Podstawy teorii drgań układów o skupionych masach 3.1 Drgania układu o jednym stopniu swobody Rozpatrzmy elementarny układ drgający, nazywany też oscylatorem harmonicznym, składający się ze sprężyny
3 Podstawy teorii drgań układów o skupionych masach 3.1 Drgania układu o jednym stopniu swobody Rozpatrzmy elementarny układ drgający, nazywany też oscylatorem harmonicznym, składający się ze sprężyny
Zasady oceniania karta pracy
 Zadanie 1.1. 5) stosuje zasadę zachowania energii oraz zasadę zachowania pędu do opisu zderzeń sprężystych i niesprężystych. Zderzenie, podczas którego wózki łączą się ze sobą, jest zderzeniem niesprężystym.
Zadanie 1.1. 5) stosuje zasadę zachowania energii oraz zasadę zachowania pędu do opisu zderzeń sprężystych i niesprężystych. Zderzenie, podczas którego wózki łączą się ze sobą, jest zderzeniem niesprężystym.
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
wszystkie elementy modelu płaskiego są w jednej płaszczyźnie, zwanej płaszczyzną modelu
 Schemat statyczny zawiera informacje, takie jak: geometria i połoŝenie tarcz (ciał sztywnych), połączenia tarcz z fundamentem i ze sobą, rodzaj, połoŝenie i wartość obciąŝeń czynnych. wszystkie elementy
Schemat statyczny zawiera informacje, takie jak: geometria i połoŝenie tarcz (ciał sztywnych), połączenia tarcz z fundamentem i ze sobą, rodzaj, połoŝenie i wartość obciąŝeń czynnych. wszystkie elementy
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
ĆWICZENIE NR.6. Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych
 ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
autor: Włodzimierz Wolczyński rozwiązywał (a)... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3
... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3") autor: Włodzimierz Wolczyński rozwiązywał (a)... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3 Rozwiązanie zadań należy zapisać w wyznaczonych miejscach pod treścią zadania PYTANIA ZAMKNIĘTE Zadanie
autor: Włodzimierz Wolczyński rozwiązywał (a)... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3 Rozwiązanie zadań należy zapisać w wyznaczonych miejscach pod treścią zadania PYTANIA ZAMKNIĘTE Zadanie
WOJSKOWA AKADEMIA TECHNICZNA Wydział Mechaniczny Katedra Pojazdów Mechanicznych i Transportu LABORATORIUM TERMODYNAMIKI TECHNICZNEJ
 WOJSKOWA AKADEMIA TECHNICZNA Wydział Mechaniczny Katedra Pojazdów Mechanicznych i Transportu LABORATORIUM TERMODYNAMIKI TECHNICZNEJ Instrukcja do ćwiczenia T-06 Temat: Wyznaczanie zmiany entropii ciała
WOJSKOWA AKADEMIA TECHNICZNA Wydział Mechaniczny Katedra Pojazdów Mechanicznych i Transportu LABORATORIUM TERMODYNAMIKI TECHNICZNEJ Instrukcja do ćwiczenia T-06 Temat: Wyznaczanie zmiany entropii ciała
DYNAMIKA dr Mikolaj Szopa
 dr Mikolaj Szopa 17.10.2015 Do 1600 r. uważano, że naturalną cechą materii jest pozostawanie w stanie spoczynku. Dopiero Galileusz zauważył, że to stan ruchu nie zmienia się, dopóki nie ingerujemy I prawo
dr Mikolaj Szopa 17.10.2015 Do 1600 r. uważano, że naturalną cechą materii jest pozostawanie w stanie spoczynku. Dopiero Galileusz zauważył, że to stan ruchu nie zmienia się, dopóki nie ingerujemy I prawo
DRGANIA ELEMENTÓW KONSTRUKCJI
 DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
DRGANIA ELEMENTÓW KONSTRUKCJI (Wprowadzenie) Drgania elementów konstrukcji (prętów, wałów, belek) jak i całych konstrukcji należą do ważnych zagadnień dynamiki konstrukcji Przyczyna: nawet niewielkie drgania
Praca, moc, energia. 1. Klasyfikacja energii. W = Epoczątkowa Ekońcowa
 Praca, moc, energia 1. Klasyfikacja energii. Jeżeli ciało posiada energię, to ma również zdolnoć do wykonania pracy kosztem częci swojej energii. W = Epoczątkowa Ekońcowa Wewnętrzna Energia Mechaniczna
Praca, moc, energia 1. Klasyfikacja energii. Jeżeli ciało posiada energię, to ma również zdolnoć do wykonania pracy kosztem częci swojej energii. W = Epoczątkowa Ekońcowa Wewnętrzna Energia Mechaniczna
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc.
 Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Blok 6: Pęd. Zasada zachowania pędu. Praca. Moc. ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przypuśćmy, że wszyscy ludzie na świecie zgromadzili się w jednym miejscu na Ziemi i na daną komendę jednocześnie
Bryła sztywna. Wstęp do Fizyki I (B+C) Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego
 Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego") Bryła sztywna Wstęp do Fizyki I (B+C) Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego Obrót wokół ustalonej osi Prawa ruchu Dla bryły sztywnej obracajacej się wokół ostalonej osi mement
Bryła sztywna Wstęp do Fizyki I (B+C) Wykład XIX: Prawa ruchu Moment bezwładności Energia ruchu obrotowego Obrót wokół ustalonej osi Prawa ruchu Dla bryły sztywnej obracajacej się wokół ostalonej osi mement
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!)
") Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Drgania wymuszone - wahadło Pohla
 Zagadnienia powiązane Częstość kołowa, częstotliwość charakterystyczna, częstotliwość rezonansowa, wahadło skrętne, drgania skrętne, moment siły, moment powrotny, drgania tłumione/nietłumione, drgania
Zagadnienia powiązane Częstość kołowa, częstotliwość charakterystyczna, częstotliwość rezonansowa, wahadło skrętne, drgania skrętne, moment siły, moment powrotny, drgania tłumione/nietłumione, drgania
Siły zachowawcze i niezachowawcze. Autorzy: Zbigniew Kąkol Kamil Kutorasiński
 Siły zachowawcze i niezachowawcze Autorzy: Zbigniew Kąkol Kamil Kutorasiński 2018 Siły zachowawcze i niezachowawcze Autorzy: Zbigniew Kąkol, Kamil Kutorasiński Praca wykonana przez siłę wypadkową działającą
Siły zachowawcze i niezachowawcze Autorzy: Zbigniew Kąkol Kamil Kutorasiński 2018 Siły zachowawcze i niezachowawcze Autorzy: Zbigniew Kąkol, Kamil Kutorasiński Praca wykonana przez siłę wypadkową działającą
Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice.
 Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice. 1 Wahadło matematyczne. Wahadłem matematycznym nazywamy punkt materialny o masie m zawieszony na długiej, cienkiej
Wykład z modelowania matematycznego. Przykłady modelowania w mechanice i elektrotechnice. 1 Wahadło matematyczne. Wahadłem matematycznym nazywamy punkt materialny o masie m zawieszony na długiej, cienkiej
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
12 RUCH OBROTOWY BRYŁY SZTYWNEJ I. a=εr. 2 t. Włodzimierz Wolczyński. Przyspieszenie kątowe. ε przyspieszenie kątowe [ ω prędkość kątowa
 Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
Włodzimierz Wolczyński Przyspieszenie kątowe 1 RUCH OROTOWY RYŁY SZTYWNEJ I = = ε przyspieszenie kątowe [ ] ω prędkość kątowa = = T okres, = - częstotliwość s=αr v=ωr a=εr droga = kąt x promień prędkość
Ruch drgajacy. Drgania harmoniczne. Drgania harmoniczne... Drgania harmoniczne... Notatki. Notatki. Notatki. Notatki. dr inż.
 Ruch drgajacy dr inż. Ireneusz Owczarek CNMiF PŁ ireneusz.owczarek@p.lodz.pl http://cmf.p.lodz.pl/iowczarek 1 dr inż. Ireneusz Owczarek Ruch drgajacy Drgania harmoniczne Drgania oscylacje to cykliczna
Ruch drgajacy dr inż. Ireneusz Owczarek CNMiF PŁ ireneusz.owczarek@p.lodz.pl http://cmf.p.lodz.pl/iowczarek 1 dr inż. Ireneusz Owczarek Ruch drgajacy Drgania harmoniczne Drgania oscylacje to cykliczna
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
J. Szantyr Wykład nr 27 Przepływy w kanałach otwartych I
 J. Szantyr Wykład nr 7 Przepływy w kanałach otwartych Przepływy w kanałach otwartych najczęściej wymuszane są działaniem siły grawitacji. Jako wstępny uproszczony przypadek przeanalizujemy spływ warstwy
J. Szantyr Wykład nr 7 Przepływy w kanałach otwartych Przepływy w kanałach otwartych najczęściej wymuszane są działaniem siły grawitacji. Jako wstępny uproszczony przypadek przeanalizujemy spływ warstwy
Zadanie 18. Współczynnik sprężystości (4 pkt) Masz do dyspozycji statyw, sprężynę, linijkę oraz ciężarek o znanej masie z uchwytem.
 Masz do dyspozycji statyw, sprężynę, linijkę oraz ciężarek o znanej masie z uchwytem.") Przykładowy zestaw zadań z fizyki i astronomii Poziom podstawowy 11 Zadanie 18. Współczynnik sprężystości (4 pkt) Masz do dyspozycji statyw, sprężynę, linijkę oraz ciężarek o znanej masie z uchwytem. 18.1
Przykładowy zestaw zadań z fizyki i astronomii Poziom podstawowy 11 Zadanie 18. Współczynnik sprężystości (4 pkt) Masz do dyspozycji statyw, sprężynę, linijkę oraz ciężarek o znanej masie z uchwytem. 18.1
Maszyny transportowe rok IV GiG
 Ćwiczenia rok akademicki 2010/2011 Strona 1 1. Wykaz ważniejszych symboli i oznaczeo B szerokośd taśmy, [mm] C współczynnik uwzględniający skupione opory ruchu przenośnika przy nominalnym obciążeniu, D
Ćwiczenia rok akademicki 2010/2011 Strona 1 1. Wykaz ważniejszych symboli i oznaczeo B szerokośd taśmy, [mm] C współczynnik uwzględniający skupione opory ruchu przenośnika przy nominalnym obciążeniu, D
PL B1. POLITECHNIKA WROCŁAWSKA, Wrocław, PL BUP 01/18. WIESŁAW FIEBIG, Wrocław, PL WUP 08/18 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229701 (13) B1 (21) Numer zgłoszenia: 419686 (51) Int.Cl. F16F 15/24 (2006.01) F03G 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Drgania. O. Harmoniczny
 Dobrej fazy! Drgania O. Harmoniczny Położenie równowagi, 5 lipca 218 r. 1 Zadanie Zegar Małgorzata Berajter, update: 217-9-6, id: pl-ciepło-5, diff: 2 Pewien zegar, posiadający wahadło ze srebra, odmierza
Dobrej fazy! Drgania O. Harmoniczny Położenie równowagi, 5 lipca 218 r. 1 Zadanie Zegar Małgorzata Berajter, update: 217-9-6, id: pl-ciepło-5, diff: 2 Pewien zegar, posiadający wahadło ze srebra, odmierza
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Laboratorium Mechaniki Technicznej
 Laboratorium Mechaniki Technicznej Ćwiczenie nr 5 Badanie drgań liniowych układu o jednym stopniu swobody Katedra Automatyki, Biomechaniki i Mechatroniki 90-924 Łódź, ul. Stefanowskiego 1/15, budynek A22
Laboratorium Mechaniki Technicznej Ćwiczenie nr 5 Badanie drgań liniowych układu o jednym stopniu swobody Katedra Automatyki, Biomechaniki i Mechatroniki 90-924 Łódź, ul. Stefanowskiego 1/15, budynek A22
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
1. Kinematyka 8 godzin
 Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
1. Obliczenia wytrzymałościowe elementów maszyn przy obciążeniu zmiennym PRZEDMOWA 11
 SPIS TREŚCI 1. Obliczenia wytrzymałościowe elementów maszyn przy obciążeniu zmiennym PRZEDMOWA 11 1. ZARYS DYNAMIKI MASZYN 13 1.1. Charakterystyka ogólna 13 1.2. Drgania mechaniczne 17 1.2.1. Pojęcia podstawowe
SPIS TREŚCI 1. Obliczenia wytrzymałościowe elementów maszyn przy obciążeniu zmiennym PRZEDMOWA 11 1. ZARYS DYNAMIKI MASZYN 13 1.1. Charakterystyka ogólna 13 1.2. Drgania mechaniczne 17 1.2.1. Pojęcia podstawowe
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Opis ruchu obrotowego
 Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Wyznaczanie współczynnika sprężystości sprężyn i ich układów
 Ćwiczenie 63 Wyznaczanie współczynnika sprężystości sprężyn i ich układów 63.1. Zasada ćwiczenia W ćwiczeniu określa się współczynnik sprężystości pojedynczych sprężyn i ich układów, mierząc wydłużenie
Ćwiczenie 63 Wyznaczanie współczynnika sprężystości sprężyn i ich układów 63.1. Zasada ćwiczenia W ćwiczeniu określa się współczynnik sprężystości pojedynczych sprężyn i ich układów, mierząc wydłużenie
Wykład 6 Drgania. Siła harmoniczna
 Wykład 6 Drgania Ruch, który powtarza się w regularnych odstępach czasu, nazywamy ruchem okresowym (periodycznym). Przemieszczenie cząstki w ruchu periodycznym można wyrazić za pomocą funkcji sinus albo
Wykład 6 Drgania Ruch, który powtarza się w regularnych odstępach czasu, nazywamy ruchem okresowym (periodycznym). Przemieszczenie cząstki w ruchu periodycznym można wyrazić za pomocą funkcji sinus albo
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Fizyka 12. Janusz Andrzejewski
 Fizyka 1 Janusz Andrzejewski Przypomnienie: Drgania procesy w których pewna wielkość fizyczna na przemian maleje i rośnie Okresowy ruch drgający (periodyczny) - jeżeli wartości wielkości fizycznych zmieniające
Fizyka 1 Janusz Andrzejewski Przypomnienie: Drgania procesy w których pewna wielkość fizyczna na przemian maleje i rośnie Okresowy ruch drgający (periodyczny) - jeżeli wartości wielkości fizycznych zmieniające
KRYTERIA OCENIANIA ODPOWIEDZI Próbna Matura z OPERONEM Fizyka Poziom rozszerzony. Listopad Poprawna odpowiedź i zasady przyznawania punktów
 Operon ZAKRES ROZSZERZONY 00% KOD WEWNĄTRZ KRYTERIA OCENIANIA ODPOWIEDZI Próbna Matura z OPERONEM Fizyka Poziom rozszerzony Listopad 06 Vademecum Fizyka MATURA 07 VADEMECUM Fizyka Zacznij przygotowania
Operon ZAKRES ROZSZERZONY 00% KOD WEWNĄTRZ KRYTERIA OCENIANIA ODPOWIEDZI Próbna Matura z OPERONEM Fizyka Poziom rozszerzony Listopad 06 Vademecum Fizyka MATURA 07 VADEMECUM Fizyka Zacznij przygotowania
DYNAMIKA SIŁA I JEJ CECHY
 DYNAMIKA SIŁA I JEJ CECHY Wielkość wektorowa to wielkość fizyczna mająca cztery cechy: wartość liczbowa punkt przyłożenia (jest początkiem wektora, zaznaczamy na rysunku np. kropką) kierunek (to linia
DYNAMIKA SIŁA I JEJ CECHY Wielkość wektorowa to wielkość fizyczna mająca cztery cechy: wartość liczbowa punkt przyłożenia (jest początkiem wektora, zaznaczamy na rysunku np. kropką) kierunek (to linia
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") R Z E C Z P O S P O L IT A P O L S K A (12) OPIS PATENTOWY (19) PL (11) 172202 (13) B1 U rz ą d P a te n to w y R z e c z y p o sp o lite j P o lsk ie j (21) N umer zgłoszenia 301554 (2 2 ) D a ta z g
R Z E C Z P O S P O L IT A P O L S K A (12) OPIS PATENTOWY (19) PL (11) 172202 (13) B1 U rz ą d P a te n to w y R z e c z y p o sp o lite j P o lsk ie j (21) N umer zgłoszenia 301554 (2 2 ) D a ta z g
Wykład FIZYKA I. Dr hab. inż. Władysław Artur Woźniak. Katedra Optyki i Fotoniki Wydział Podstawowych Problemów Techniki Politechnika Wrocławska
 Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Katedra Optyki i Fotoniki Wydział Podstawowych Problemów Techniki Politechnika Wrocławska http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html DRGANIA HARMONICZNE
Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Katedra Optyki i Fotoniki Wydział Podstawowych Problemów Techniki Politechnika Wrocławska http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html DRGANIA HARMONICZNE
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
MECHANIKA OGÓLNA (II)
") MECHNIK GÓLN (II) Semestr: II (Mechanika I), III (Mechanika II), rok akad. 2013/2014 Liczba godzin: sem. II *) - wykład 30 godz., ćwiczenia 30 godz. sem. III *) - wykład 30 godz., ćwiczenia 30 godz., ale
MECHNIK GÓLN (II) Semestr: II (Mechanika I), III (Mechanika II), rok akad. 2013/2014 Liczba godzin: sem. II *) - wykład 30 godz., ćwiczenia 30 godz. sem. III *) - wykład 30 godz., ćwiczenia 30 godz., ale
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
MECHANIKA 2. Praca, moc, energia. Wykład Nr 11. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn