Analiza Matematyczna część 4
|
|
|
- Janina Kozieł
- 7 lat temu
- Przeglądów:
Transkrypt
1 [wersja z 6 III 7] Analiza Matematyczna część 4 Konspekt wykładu dla studentów fizyki/informatyki Akademia Świętokrzyska 5/6 Wojciech Broniowski
2 Analiza funkcji wielu zmiennych
3 Przestrzeń wektorowa (liniowa) x, y, z X - wektory, a, b - skalary, tj. liczby pewnego ciala K x+ y = y + x przemiennosć dodawania ( x+ y) + z = x+ ( y + z) laczmosć dodawania + x = x istnienie wektora zerowego, X x y: x+ y = istnienie wektora przeciwnego, y = x x = x abx ( ) = ( abx ) a( x+ y) = ax+ ay Inna notacja: x = x ( a+ b) x = ax+ bx X nazywamy przestrzenią wektorową (lub liniową) nad cialem K 3
4 Przyklad: wektory na plaszczyźnie X = R, K = R x x+ y ax x =, x y,, ax x + = = = x + y ax n ax i i i= n Jeżeli ax = a = a =... = a =, i= - kombinacja liniowa i i n to wektory x, i =,..., n nazywamy liniowo niezależnymi i A X napina X jeżeli każdy wektor z X mozna zapisać w postaci kombinacji liniowej wektorów z A. Jeżeli ponadto wektory z A są liniowo niezależne, to A nazywamy bazą przestrzeni X. 4
5 Przestrzeń wektorowa unormowana : X R - norma ) x x >, = ) x + y x + y 3) ax = a x Tw. Przestrzeń unormowana ( X, ) jest przestrzenią metryczną z metryką ρ(x,y) = x y. (norma indukuje metrykę, ale metryka nie indukuje normy) D: ρ : X X R+ {} ) ρ(x,x) = =, ) ρ(x,y) = ρ(y,x), 3) ρ(x,z) = x z = x y + y z x y + y z = ρ(x,y) + ρ(y,z) Przyklad: X = R n, x = x + x x n (dlugosć wektora) 5
6 Baza kanoniczna: Iloczyn skalarny wektorów e =, e =,..., en = x = xe+ xe xnen, y = ye+ ye ynen Iloczyn skalarny: x y = xy+ xy xnyn Tw. x = x x dla normy euklidesowej Tw. Z nierównosci Schwarza x y x y Ponadto x y =± x y dla x = αy, α > - równolegle, α < - antyrównolegle i rcos φ r'cos φ' x = y = x = r y = r r sinφ r 'sin φ' x y = rr'(cosφcos φ' + sinφsin φ') = rr'cos( φ φ') Przyklad: R,,,, ' i 6
7 Przyklady: n n ) X =, K =, x y = x y + x y x y, x = x x x x n n ) X przestrzeń funkcji rzeczywistych calkowalnych na przedziale [a,b] Iloczyn skalarny: ( ) ( ) b b f g = f x g x dx, f = f( x) dx a 3) X - pre z strzeń ciągów o wyrazach rzeczywistych, ( a ) n n, n(( n) takie, że wyrażenia mają sens) n= n= a b= a b a = a a a n n n 7
8 Odwzorowanie liniowe XY, - przestrzenie wektorowe nad cialem K Odwzorowanie liniowe L: X Y : xy, X ab, KLax : ( + by) = alx ( ) + bl( y) n k Odwzorowanie L: R R można przedstawić w postaci macierzy o n kolumnach i k wierszach a a a n x a a a n x Lx= = y ak ak akn xn n k Tw. Odwzorowanie liniowe R R jest ciągle 8
9 Konwencja Einsteina o sumowaniu (fiz.) n m= k A B = A B... m m m m... (sumujemy po powtarzających się wskaźnikach) n a b = a b = y m= ( AB) = A B - iloczyn macierzy kk n k = m kk m = Mx y = αβ αγ γβ ab m m M x k kl l M = M = TrM - slad macierzy 9
10 Pochodna cząstkowa n f : R R, y = f( x) = f( x, x,..., xn) Pochodna cząstkowa po x w punkcie x: f f( x,..., xk + δ,..., xn) f( x,..., xk,..., xn) ( x) = lim x δ k δ Inna notacja: f ( x), f ( x) x k k k Pochodną funkcją cząstkową po x nazywamy funkcję f przyporządkowującą każdemu x wartosć ( x) x Pochodna cząstkową po x k wyliczamy tak samo, jak zwykłą pochodną, traktując pozostałe zmienne jako stałe f( x, y, z) = zsin( xy) f ( x, y, z) = zy cos( xy), f ( x, y, z) = zx cos( xy), f ( x, y, z) = sin( xy) x y z k k
11 Pochodna Frécheta n Rozważmy f : R R k. Pochodna Frécheta zdefiniowana jest jako odwzorowanie n k liniowe A: R R takie, że f( x + h) f( x) Ah lim = (uwaga, f( x) jest wektorem o k skladowych!) h h f f f ( x) ( x) ( x) x x x Wiersze macierzy A stanowią n pochodne cząstkowe kolejnych f f f ( ) ( ) ( ) Tw. A = x x x składowych funkcji f. Wierszy jest x x x k (wymiar przeciwdziedziny), a n kolumn n (wymiar dziedziny). fk fk fk ( x) ( x) ( x) x x x n f( x, y) xy y x k = 3, n =, f( x, y) = f( x, y) = x+ y, f '( x, y) = A= f3( xy, ) x y
12 Gradient n f : R R Gradientem nazywamy pochodną Frécheta funkcji f, tj. f( x) f( x) f( x) f( x) = grad f( x) =,,..., x x xn Operator Nabla =,,..., x x xn f( x, y) = x + y, f( x) = x, y ( )
13 Pochodna kierunkowa n k n f : R R, u R, u =, h R. Pochodna kierunkowa w kierunku u: f f( x + δu) f( x) ( x) = f u ( x) = lim u δ δ f Tw. Jeżeli A jest pochodną Frécheta w punkcie x, to ( x) = Au u f( x + h) f( x) Ah D: h = δu, lim = h h f( x + δu) f( x) δau lim = f u ( x) Au = δ δ Pochodna kierunkowa f jest największa w Tw. Dla k = mamy ( x) = u f u u kierunku gradientu! u f f f f f f f D: ( x) Au,,..., = = = u + u un = u f u x x xn x x xn un 3
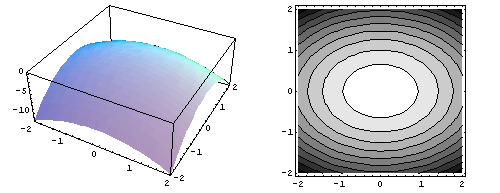
 = x y f( x, y) = ( x, y) F = V")
14 Interpretacja geometryczna gradientu f ( x, y) = x y f( x, y) = ( x, y) F = V 4
15 Pochodna funkcji złożonej k m m n f : R R, g: R R, posiadające pochodne Frécheta w punkcie x i y = g( x). Tw. Pochodna Frecheta funkcji f g wynosi f g '( x) = f '( y) g'( x) ( ) ( ) f f g g ( g( x)) ( g( x)) y y ( x) ( x) m x x n f g '( x) =, fk fk gm gm ( g( x)) ( g( x)) ( x) ( x) y y m x x n ( f g) ( x) i fi( g( x)) f y i j notacja tensorowa: = = ( x) x x y x l l x y m =, k = n = 3, f( y) = + y3, g( x) = x x y, f( g( x)) = + sinx sin x y f '( y),,, g'( x) x =, ( f g) '( x),, x = cos x y y = = + 4 x cos x cos x j l 5
16 h( α( s,), t β(,), s t γ(,)) s t h α h β h γ = + + s α s β s γ s h( α(,), s t β(,), s t γ(, s t)) h α h β h γ = + + t α t β t γ t κ( f( x, y), y) κ f = x f x κ ( f( x, y), y) κ f κ = + y f y y 6
17 Pochodne cząstkowe wyższych rzędów n f U R, f : U R, ( x) różniczkowalna x i f Pochodna cząstkowa drugiego rzędu: ( x) = fxx = f j i x x f f f f Tw. W U istnieją pochodne i, ciągle w x. Wtedy =. x x x x x x x x i D: Φ ( xy, ) = f( x + h, y+ k)- f( x, y+ k)- f( x+ h) + f( x, y) ϕ( xy, ) = f( x+ hy, ) f( xy, ), ψ( xy, ) = f( xy, + k) f( xy, ) Z Tw. Lagrange'a o wartosci sredniej θ, θ, η, η (,) : j j j i i Φ ( xy, ) = ϕ( xy, + k) ϕ( xy, ) = kϕ ( xy, + θ k) ϕ ( xy, + θ k) = f( x+ hy, + θ k) f( xy, + θ k) = hfxy( x+ θh, y+ θk) y Φ ( xy, ) = hkf ( x+ θ hy, + θ k) xy Podobnie Φ ( xy, ) = ψ( x+ hy, ) ψ( xy, )... Φ ( xy, ) = hkf ( x+ η hy, + ηk) yx y f ( x+ θ h, y+ θ k) = f ( x+ η h, y+ ηk). Z ciaglosci f ( x, y) = f ( x, y) xy yx xy yx ji i j j i 7
18 3 f f Pochodna cząstkowa rzędu trzeciego: ( x) = = x x x x x x k j i k j i f kji f = + 3 : R R, f( x, y, z) x yx f = x+ y, f = x, f =, f = f =, f = x y xx xy yx yy a b g : R R, g( a, b) = ab a b ga =, gb =, gaa = b a, gab =, gbb = 8
19 Operator Laplace a i dywergencja (fiz.) Operator to funkcja, która funkcji przyporządkowuje Operator Laplace'a (laplasjan) Δ= = = = n i i i i... n i= f Δ f( x,..., x ) = n x xn 3 f( x, y) = x + y + x, Δ f = 4+ 6x n n Dywergencja: g : U R R (pole wektorowe) g gn div g = igi = g = x x x (,, ), xyz gxyz= zy g= + z + xy f n funkcję. 9
20 Elementy rachunku tensorowego (fiz.) dla i = j Delta Kroneckera: δij = dla i j tensor symetryczny : δ = δ, δ = n (wymiar przestrzeni) δ A x = A, = δ i ij... j i... ij x j ij ji ii Pseudotensor Levi-Civity (w 3 wymiarach): ε ε = ε = ε =, ε = ε = ε = tensor calkowicie (we wszystkich wskaźnikach) antysymetryczny εijkεilm = δ jlδkm δ jmδkl, εijkεijm = δkm, εijkεij k = 6 Iloczyn wektorowy (a b) = ε a b i ijk j k iˆ ˆj kˆ równoważny zapis: a b = a a a 3 b b b 3 ijk, pozostale =
21 ε a ε bc = ε ε a bc = ( δ δ δ δ ) a bc ijk j klm l m kij klm j l m il jm im jl j l m = δδ abc δ δ abc = acb abc a ( b c) = a c b a b c il jm j l m im jl j l m j j i j j i ( ) ( ) ε abε cd = ( δ δ δ δ ) abcd = acbd bca a b c d = b a d b c ijk j k ilm l m jl km jm kl j k l m j j k k j j k k ( ) ( ) ( a c)( d) ( )( ) d
22 Rotacja (fiz.) 3 3 f : U R R rot f = f, rot f = ε ( ) i f ijk j k ε f = ε f = ε f = ( i j) = ε f = ε f i ijk j k ijk i j k jik i j k ijk j i ijk i j iεijk j fk = div (rot f ) = rot grad f = i( u( x) fi( x)) = fi iu+ u i fi div ( uf ) = f u + u f = f grad u+ u div f
23 Wzór Taylora dla wielu zmiennych (fiz.) f U R R P = x y P x+ h y + k PP U :, (, ), (, ), j j j j f( x, y) j l l d f( x, y) = h k dwa wymiary, n czlonów j l l i l = x y Tw. f ma ciągle pochodne cząstkowe rzędu n w U θ (,): n n d f( P ) d f( P) d f( P) d f( x + hθ, y + kθ )) f( P) = f( P ) !! ( n )! n! m Dla d wymiarów i n = czlonów, f : R R, mamy θ f( x + h) = f( x) + h + hh d d d f( x) f( x + h) i i j i= xi i= j= xi xj d f : U R R d-wymiarów = f( x) + if( x) hi + i j f( x + θh) hh i j i id f( a,..., ad ) i id f( x,..., xd ) = ( x a)...( xd ad) (szereg) i id x x i!... i! i = i = d d 3

24 Przyklad: y x xy x y xy x xy 7x y f( x) = sin( x)cos( xy) e x xy dokładna przybliżona wielomianem 4
25 Ekstrema funkcji wielu zmiennych Tw. (warunek konieczny ekstremum lokalnego) Jeżeli funkcja ma ekstremum lokalne w punkcie x i ma w tym f( x ) pochodne cząstkowe, to =. x i Dowód: Ustalmy i, następnie rozważmy g( x) = f(..., x, x, x Funkcja gx ( ) ma ekstremum dla x= x, i i x+, a zatem z tw. o warunku,...). dg( x) koniecznym ekstremum dla funkcji jednej zmiennej mamy =, dx f(..., xi, x, xx+,...) co oznacza =. x f( x, y) = x + y x =, y = f ( x, y) f( x, y) = = x y 5
26 Forma kwadratowa to wyrażenie postaci (konwencja Einsteina o sumowaniu!) gh ( ) = h i a ij h j (np. x + y z zx+ xy) Forma kwadratowa jest dodatnio okreslona, jeżeli h : g( h) > a ujemnie okreslona, jeżeli h : g( h) <. Jeżeli nie zachodzi żaden z tych przypadków, to forma jest nieokreslona. f( x) Tw. Rozważmy formę d f( x)( h) = hh i j i niech f( x) ma ciągle pierwsze xi x j f( x ) i drugie pochodne w okolicy x, oraz =. Wtedy jeżeli xi a) d f( x)( h) jest dodatnio okreslona to f ma w x minimum lokalne b) d f( x)( h) jest ujemnie okreslona to f ma w x maksimum lokalne c) d f( x )( h) jest nieokreslona to f nie ma w x ekstremum lokalnego 6
27 Minorem rzędu k macierzy a rzędu m nazywamy wyznacznik utworzony z pierwszych k rzędów i pierwszych k kolumn tej macierzy: A k a a k k a = a kk Tw. Forma gh ( ) = hah jest dodatnio okreslona, jeżeli wszystkie jej minory są i ij j A > k = m A > k = m k dodatnie, k,,,..,, a ujemnie okreslona, jeżeli (-) k,,,..,. Jeżeli nie zachodzi żadna z tych dwóch sytuacji, to forma jest nieokreslona. Przypadek m = : W= f ( x, y) f( x, y) x x y f( x, y) f( x, y), = = f ( x, y) f( x, y) x y xy y f( x, y) ) W >, > - minimum x f( x, y) ) W >, < - maksimum x 3) W < - punkt siodlowy 4) W = - brak rozstrzygnięcia 7

28 minimum maksimum 8
=x -y")
29 Siodło: f(x)=x -y +xy 9
30 Poszukiwanie ekstremów globalnych na obszarze domkniętym: ) znalezienie ekstremów lokalnych we wnętrzu ) inspekcja brzegu i "rogów" 3
31 Funkcje uwikłane (fiz.) F( x, y) - ciągla, F( x, y) = y = y( x) - funkcja uwiklana Tw: F( x, y ) =, F, F - ciągle w otoczeniu ( x, y ), F ( x, y ) x y y ) ε > δ > x ( x δ, x + δ) jedyne y ( y ε, y + ε) : F( x, y) = ) y'( x) = Fx ( x, yx ( )) F ( x, y( x)) y F x y = x + y = y = x Fx = x, Fy = y y'( x) =, y'( ) = - mamy "bez wysilku" y (, ), x - równanie okręgu i punkt doń należący F( x y F y = x x y + x y x = y = - nie da się odwiklać! y, ) ( )sin, (,) = y xy x sin y y '( x) =, y'() = y xln x y + ( x )cos y 3
32 Wyprowadzenie ): F( x, y( x)) =, d F ( x, y ( x )) = F x( x, y ) + y '( x ) F y( x, y ) = dx = Ponadto Fxx y'( x) Fxy y''( x) Fy ( y'( x)) Fyy F x F x Fxx Fxy + y''( x) Fy + Fyy = F y F y F F y ''( x) = F F F + F xx y xy x y 3 Fy Fxx Ekstremum yx ( ) : y'( x) = Fx = y''( x) = F yy F x y 3
33 Przyklad krzywej trzeciego stopnia: Lisć Kartezjusza F x y = x + y 3xy = 3 3 (, ) F = y x y + y y y y x y x y 3 3 (, ) (,) (, ) ( 4, ) F x y y y y x x x x x ' = = ' = dla = + 3 = Fy 3y 3x x =, y = F y '' = 3 xx 3 4, F F F F + F F y xy x y yy x 3 Fy 6 x(3y 3 x) + 6(3x 3 y)(3y 3 x) + 6 y(3x 3 y) = 3 (3y 3 x) (po wstawieniu) y''( x, y ) < - maksimum = 33
34 Ekstrema warunkowe (fiz.) f, g: R R Funkcja f ma w punkcie ( x, y ) maksimum warunkowe, jeżeli δ > x, y: ( x- x ) + ( y- y ) < δ g( x, y) = f( x, y ) f( x, y) analogicznie: minimum... f( x, y ) f( x, y) g gxy (, ) = y= yx ( ), y' = g x y g x Rozważmy F( x) = f( x, y( x)) F'( x) = fx + fyy' = fx fy = g funkcja może mieć ekstremum gdy fg = f x Przyklad: (, ), (, ) warunek: y = x, x = y =± x y y x y = x+ y g x y = x + y fg y fg x y y x g y fg 34
35 Metoda mnożników Lagrange a (fiz.) Tworzymy pomocniczą funkcję Φ ( x, y) = f( x, y) λg( x, y), gdzie λ nazywa się mnożnikiem Lagrange'a lub czynnikiem nieoznaczonym Lagrange'a. Następnie znajdujemy ekstrema funkcji Φ tak, jakby zmienne x i y byly niezależne. Rozwiązujemy uklad równań Φ =, Φ =, gxy (, ) =. x y Dowód: Φ = f + λg =, Φ = f + λg =. Eliminując λ dostajemy f g = f g x x x y y y x y y x. Dla n zmiennych i k warunków mamy następujące uogólnienie: Φ( x, x,..., x ) = f( x, x,..., x ) + λ g ( x, x,..., x ) λ g ( x, x,..., x ) Szukamy ekstremum n n n k k n Φ ( x, x,..., x ) = f( x, x,..., x ) + λ g ( x, x,..., x ) λ g ( x, x,..., x ) = j n j n j n k j k n Ponadto g ( x, x,..., x ) =, r =,..., k, co lacznie daje n+ k równań na n+ k niewiadomych r ( n zmiennych x i k czynników λ). n 35
36 Przyklad: znajdź największą i najmniejszą wartosć formy kwadratowej w trzech wymiarach, f = x a x, a = a, przy warunku gx (, x, x) = x + x + x =. 3 3 i ij j ij ji Φ / = ( a λ) x + a x + a x = x 3 3 Φ y / = ax + ( a λ) x a3x3 + = Φ / = a x + a x + ( a λ) x = z (*) a λ a a 3 a a λ a = 3 a a a λ co daje 3 pierwiastki λ, λ, λ. Ponadto, mnożąc (*) przez x i dodając stronami 3 3 dostajemy f( x, x, x ) = λ( x + x + x ). Wniosek: maksimum i minimum warunkowe 3 funkcji f pokrywa się z maksymalną i minimalną wartoscią λ. i i 36
37 Krzywe i rozciągłości wielowymiarowe Φ V R U R k n Φ Φ k n :, homeomorfizm (, i ciągle), U, V otwarte. Wtedy U nazywamy k-wymiarową powierzchnią (hiperpowierzchnią, rozciągloscią, rozmaitoscią) Jeżeli Φ jest homeomorfizmem regularnym ( x V rząd Φ '( x) = k) to U nazywamy k-wymiarową powierzchnią gladką k= - zerowymiarowa powierzchnia (punkty izolowane) k= - krzywa, linia k= - powierzchnia k> - hiperpowierznia 37
38 Przyklad: π π cost sint k =, n=, U = (, ), Φ=, ', : ' rz ' luk gladki t U sint Φ = cost Φ Φ = t k, n, U (,),, t : ' sgn( t) = = = Φ= Φ = w t = szpic t t Parametr t numeruje punkty wzdłuż krzywej 38
39 Krzywa domknięta: Φ:[ ab, ] R n Φ( a) początek, Φ( b) koniec Φ( a) Φ( b) homeomorficzna z przedzialem Φ ( a) =Φ( b) homeomorficzna z okregiem RYS., str. 39
40 Krzywe stopnia drugiego (stożkowe) Powstają z przecięcia stożka płaszczyzną: Okrąg, elipsa, parabola, hiperbola ax + bxy + cy + dx+ fy + g = a b d a b Δ = b c f, J = b c d f g a d c f I = a+ c, K = + d g f g okrąg=elipsa, a = c krzywa Δ J Δ / I K elipsa > < parabola hiperbola < linie przecinajace się < linie przekrywające się 4
41 Redukcja do prostszej postaci: Przez obrót możemy się pozbyć czlonu mieszanego x' = xcosφ + ysinφ y ' = xsinφ + ycosφ x y a c φ φ + b φ φ Czlon mieszany wynosi wtedy ' '[( ) cos sin (cos sin )] b π i znika dla tg( φ) = dla c a oraz φ= dla c = a. Po takim obrocie c a 4 mamy Ax ' + Cy ' + Dx' + Fy ' + G =. Czlonow liniowych pozbywamy się przez transformację x'' = x' + D/ A y' ' = y' + F / C Wted y Ax + Cy + G =. '' '' '' x y c a b c a b e + =, >, =, = mimosród a b a a = b = r, x + y = r okrąg y ax, x ay parabola x a = = y =, xy = c hiperbola b 4


42 Elipsa x a y + b = =, ( ) c a b a b c e = a mimośród XF + XF = a = const. F, F -ogniska a - półoś wielka b - półoś mała 4
43 43

44 44
45 Całki eliptyczne (fiz.) x = asin φ, y = bcosφ długość łuku elipsy Ψ Ψ Ψ dφ k sin dx dy dx dy d a b d ( ) + ( ) = φ cos φ sin φ φ dφ + = + = dφ a cos φ + ( a c )sin φdφ = a c sin φdφ = a e sin Φ L( Φ ) = a e sin d φ φ π = Fk (, Ψ ), k<, Fk ( ) = Fk (, ) φ dφ k φ E k k E k E k sin = (, Ψ ), <, ( ) = (, ) dφ ( + hsin φ) k sin = Khk (,, Ψ) φ π φdφ Całka eliptyczna: I rodzaju II rodzaju III rodzaju W wielomian stopnia 3 lub 4 45


46 Hiperbola PF PF = a = const. x y = a b c = a + b c e = > a asymptoty 46

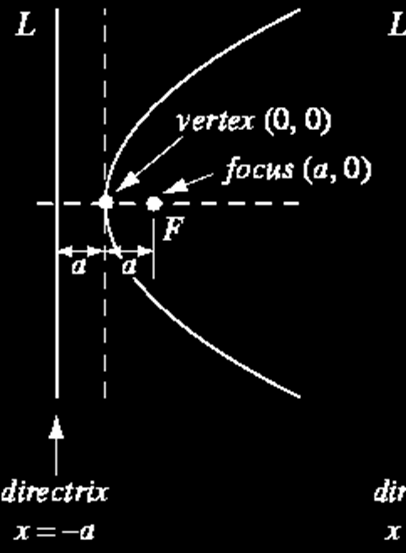


47 Parabola x = e = 4ay 47

48 48

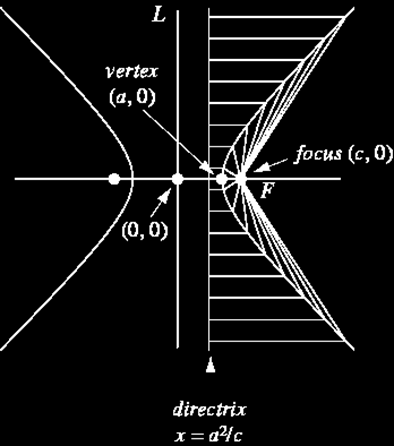
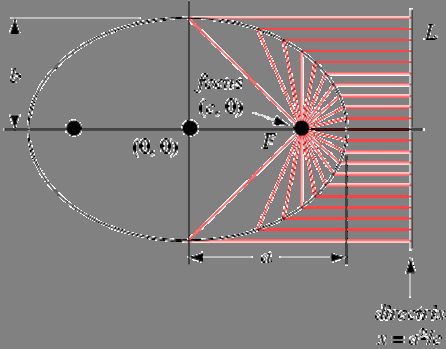
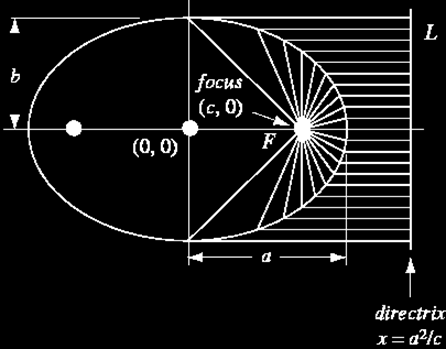
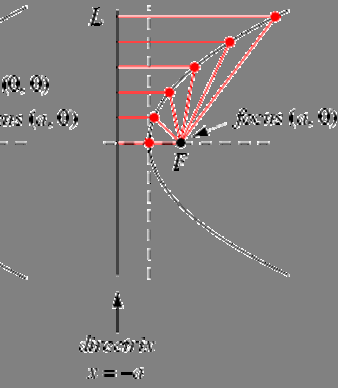
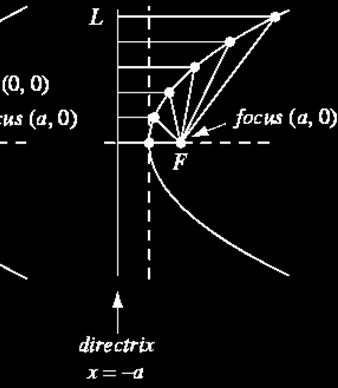
49 Stosunek długości czerwonych odcinków ukośnych do poziomych wynosi e directrix = kierownica 49
50 Krzywa y = y( x) Krzywizna krzywej płaskiej (fiz.) równanie stycznej w ( x, y ) : y y = y'( x)( x x ) równanie normalnej w ( x, y ) (prostopadla do stycznej): y y = ( x x ) y '( x ) π ( jest tak dlatego, bo y '( x) = tgα, więc tg( α + ) = ctgα = ) y '( x) Rozważmy punkty na krzywej, ( x, y ) i ( x, y ), oraz normalne w tych punktach: y y = ( x x ), y y = ( x x ). Ich punkt wspólny to y'( x) y'( x) ( y y) ( y y) + y'( x ) + y'( x ) * x x * x x x = x y'( x), y = y +. y'( x) y'( x) y'( x ) y'( x) x x x x * + y x * + y x = = + y''( x) y''( x) 3/ ( + y' ( x ) ) x y ρ = krzywizna to y' '( x ) ( '( )) ( '( )) W granicy x x dostajemy x x y'( x ), y y. Odleglosć tego punktu od (, ) to, a z def. ρ 5
51 d y dy y dt x x y y x Dla krzywej parametrycznej ( xt ( ), yt ( )) mamy =, = =, dx x dx x x r. stycznej y ( x x( t)) x ( y y( t)) = t r. normalnej x ( x x( t)) + y ( y y( t)) = t * wsp. srodka krzywizny ( ) krzywizna = ρ t x = x t xy yx t tt t tt 3/ ( xt + yt ) t t t d y t t tt t tt 3 t t ( t) x + y x + y y y t x xy yx xy yx t t * t t t, y = ( ) + t tt t tt t tt t tt t Krzywizna nie zależy od ukladu wspólrzędnych (translacje, obroty). 5
52 Parametryzacja kanoniczna krzywej (fiz.) ( xt ( ), yt ( ), zt ( )) t st ( ) = dt' x + y + z dlugosć krzywej mierzona od s s t t t t' t' t' s = x + y + z > t( s) t ( xts [ ( )], yts [ ( ), zts [ ( )]) krzywa sparametryzowana kanonicznie dx xt xt dy dz = =, =..., =... ds st x + y + z ds ds t t t dx dy dz + + = ds ds ds Dla d = y = f( x) dα dα dx f kąt stycznej do Ox: α = arctg f ' = ds dx ds f xx = + x + = f ρ Interpretacja: krzywizna jest pochodną tangensa nachylenia krzywej po parametrze kanonicznym x 5


53 Powierzchnie kawałkami gładkie RYS Sfera Alexandra Butelka Kleina 53





54 54
55 Całki wielowymiarowe Uogólnienie calki Riemanna: P = [ a, b ] [ a, b ]... [ a, b ] P = ( b a )... ( b a ) δ = ( b a ) ( b a ) n n Dokonujemy podzialu prostokąta n m = inf{ f( x): x P}, M = sup{ f( x): x P} i i i i s = m P m P, S = M P M k k Rozważamy normalny ( δ * * n n * * Jeżeli s = to wielkosć tę na n n n n ) ciąg podzialów s = lim s calka dolna, S = lim S calka górna funkcji f na prostokącie P S n n k P zywamy wielokrotną calka Riemanna k Notacja: P dxdy f ( x, y), dxdydz g( x, y, z) P 55
56 Całka iterowana P = [ a, b ] [ a, b ] b b b b dy dx f ( x, y), dx dy f ( x, y) calki iterowane a a a a Tw. Fubiniego: Jeżeli f : P R jest ciągla, to obie calki iterowane są równe calce Riemanna P dxdy f ( x, y). (analogicznie dla większej liczby wymiarów) Przyklad: P = [,] [, ] P x y dxdy (x y + ) = dx dy ( x y + ) = dx ( + y) = dx(x + 4) = y= 3 xy y = dy dx ( x y + ) = dy ( + x) = ( ) 4 3 dx + = x= 56
57 Całki po dowolnym obszarze A R n f( x) dla x A F( x) = dla x P\ A ϕψ, :[ ab, ] R A= {( x, y): a x b, ϕ( x) y ψ( x)} zbiór normalny względem Tw. Jeżeli f : A R jest ciągla, to jest calkowalna, oraz ψ ( x) dxdy f ( x, y) = dx dy f ( x, y) A a ϕ ( x) b Przyklad: A={( x, y) : x, y x} trójkąt x dxdy dx dy dx x x xy = xy = ( ) = 4 A Ox 57
58 Zastosowania całek wielokrotnych V = dxdydz A A= {( x, y, z): x, y, x, x+ y + z } x, y ustalone z x y x ustalone, szukamy największego możliwego y: y x z, ponieważ najmniejsze z = y x x x y x V = dx dy dz = dx dy( x y) = dx ( x) Jest to tzw. objetosć sympleksu. W n wymiarach V = n! ( x) = 6 58
59 Środek ciężkości x = x dxdy y y dxdy A = A x A figura -wym. = x dxdydz, z z dxdydz bryla V = V V A V Objętosć bryly obrotowej powstalej w wyniku obrotu regularnego zbioru A wokól Ox: V = π y dxdy Reguly Guldina: V = πη A, η = y dxdy, A Dla torusa V = πa πr Podobnie dla powierzchni powstalej w wyniku obrotu luku mamy S = πξ L, ξ = ydt - odleglosc srodka ciężkoci luku od osi obrotu L Dla torusa S = πa πr β α A A 59
60 Pole powierzchni z = f( x, y), ( x, y) A f f S = dxdy + + x y A Wzór wynika z konstrukcji przybliżającej powierzchnię równolegloboami k Przyklad: f( x, y) = x y A= {( x, y) : x, y, x+ y } 3 S = dxdy 3 = A 6
61 Zamiana zmiennych - dyfeomorfizm n n f C R U V R :, homeomorfizm rzędu n - (bijekcja, pochodna Frecheta odwracalna, f i f ciągle) n n Tw. ϕ : X R Y R klasy C ϕ ( b) Pamiętamy, że dla jednej zmiennej dy f ( y) = dx f [ ϕ( x)] ϕ '( x), y = ϕ( x) ϕ ( a) J( x) = jakobian przeksztalcenia ϕ Wtedy n n... f( y) dy.. dy =... f[ ϕ( x)] J( x) dx.. dx, y = ϕ ( x,..., x ) Y ϕ x ϕn x n ϕ x ϕn x X b a n i i n 6
 = = y y sinφ rcosφ r φ cosφ r sinφ J = = r sinφ r cosφ dxdy f ( x, y) = rdrdφ f ( x( x, φ), y( r, φ) ) Homeomorfizm regularny dla r, rząd Φ ' =.")
62 Podstawowe układy współrzędnych Współrzędne biegunowe (osiowe) Φ: R R Φ xr (, φ) Φ (, r φ) = =, x rcos, y r sin yr (, φ) = φ = φ Φ rxy (, ) y Φ ( x, y) =, r x y, φ=arctg φ( x, y) = + x x x r φ cosφ r sinφ Φ '( r, φ) = = y y sinφ rcosφ r φ cosφ r sinφ J = = r sinφ r cosφ dxdy f ( x, y) = rdrdφ f ( x( x, φ), y( r, φ) ) Homeomorfizm regularny dla r, rząd Φ ' =. Dla r = jest osobliwosć, bo w tym punkcie nie można okreslić kąta 6
63 Przyklady: dxdy x + y = rdrdφ r π = dr dφ = r x + y R r R Rπ I = e dxdy = e rdrdφ = π rdre = π e = π πe I R = lim I = π R R x y r r r R x + y R r R R R = = x y x I dx e dy e dx e dx e x = π r= 63


64 Współrzędne eliptyczne x = arcosφ y = brsinφ x a y + = r b, J = abr Współrzędne walcowe (cylindryczne) x = rcosφ y = rsinφ z = z J = r Liniowa zmiana skali x = ax' y = by' z = cz' J = abc 64
65 Współrzędna sferyczne (kuliste) Φ: R R 3 3 x = rsinθ cosφ y = rsinθ sinφ z = rcosθ θ [, π] - kąt osiowy(szerokosć geogr.), φ [, π) - kąt biegunowy (azymutalny, dlugosć geogr. ) sinθ cosφ rcosθ cosφ rsinθ sinφ Φ ' = sinθ sinφ rcosθ sinφ rsinθ cosφ cosθ r sinθ J = r sinθ r = rz Φ' = w srodku kuli nie można okreslić kątów θ = θ = π rz Φ ' = na biegunach nie można okrelić kąt a φ 65

66 Przykla d: Objętosć kuli π π R π 3 R 4 3 V = dxdydz = dr dθ dφr sinθ = dr dcosθ dφr = π = πr 3 3 x + y + z < R ( dcosθ = sinθdθ) R Srodek ciężkosci pólkuli: η = x + y + z < R z> x + y + z z> < R zdxdydz dxdydz R π / π dr d d r r 3 = θ φ sin θ cosθ = π R 3 R π 4 3 R 3 3 πr = dr d cos θ dφ r cosθ = π = R πr
67 Płaszczyzna styczna Płaszczyzna styczna do powierzchni gładkiej o równaniu f(x,y,z)= dana jest równaniem f( x, y, z) f( x, y, z) f( x, y, z) ( x x ) + ( y y ) + ( z z ) = x y z f( x, y, z ) f( x, y, z ) f( x, y, z ) x y z powierzchni w punkcie ( x, y, z ). Prosta prostopadla do powierzchni w tym Wektor,, jest prostopadly do punkcie ma więc równanie parametryczne f( x, y, z) f( x, y, z) f( x, y, z) t + x, t + y, t + z x y z Dla sfery f = x + y + z R, więc prosta prostopadla ma równanie ( xt+ x, y t+ y, z t+ z ) 67
68 Plaszczyzna styczna do powierzchni w punkcie x jest przestrzenią liniową. k n k Niech Φ: V R R, e, e,..., e tworzą bazę w R, oraz y =Φ( x). Wtedy u =Φ' ( x) e tworzą bazę w przestrzeni stycznej. i i k Przyklad: Dla powierzchni danej jako Φ ( x, y) = ( x, y, f( x, y)) mamy Φ'=, fx f y u = Φ ' e =, v 'e = =Φ = = fx f y f x fx f y f y 68
69 Orientacja k Rozważmy bazy w przestrzeni R : ( v,..., v ) oraz ( w,..., w ). Bazy te powiazane są n i ij j j= k przeksztalceniem liniowym w = a v, przy czym musi zachodzić warunek a aby zachować liniową niezależnosć. Jeżeli a >, to mówimy, że bazy są zgodnie zorintowane, a gdy a <, to mówimy, że są zorientowane przeciwnie. k Dla k = mamy jedną bazę jednoelementową v = i drugą w =. Dla k = przykladowe bazy v =, v = i baza, są w = w = powiązane przeksztaceniem o macierzy a =, zatem a i bazy są = > zorientowane zgodnie, natomiast dla bazy u =, u, a, a = = = <, więc ta baza jest zorientowana przeciwnie do poprzednich. Orientację bazy kanonicznej nazywamy prawoskretną (zorientowaną dodatnio). 69
70 Wektor normalny 3 Niech M będzie powierzchnią dwuwymiarową w R, T x plaszczyzną styczną do M w punkcie x, a wektory ( u, v) bazą na plaszczyźnie stycznej. Wektor normalny definiujemy u v jako n =. Wektor ten wskazuje zewnętrzną (wewnętrzna) stronę powierzchni u v orientowalnej jesli baza jest prawoskrętna (lewoskrętna). c. d. przykladu: uv 3 uv 3 f x f x u =, v, u v = = u3v uv 3 f y, n f = = y f x f f y uv uv x f + y + x x y Dla górnej pólsfery f = R x y = z, fx =, fy =, n = y z z x + y + z z Dla dolnej pól am sfery wynik taki s (je f = R x y = z ż!) 7

 i")
")
71 Powierzchnie orientowalne (mają stronę wewnętrzną i zewnętrzną) i nieorientowalne (nie można wyznaczyć strony) Wstęga Möbiusa Butelka Kleina 7
, s [ w, w] (M.")
72 t t t x = ( R+ s cos ) cos t, y = ( R+ s cos ) sin t, z = ssin t [, π ), s [ w, w] (M.C Escher) 7
73 73
74 Całka krzywoliniowa zorientowana F = ( F, F,..., Fk ), C - krzywa gladka I = F dx + F dx F dx = F dx I C k k C = I + I C + C C C, I C = I C Tw. Calka IC nie zależy od parametryzacji krzywej b dy D: yt ( ) = x( ϕ( t)) F( y) dy= F( y( t)) dt = dt C a b β dx( ϕ) dϕ dx( ϕ) = F( x( ϕ( t))) dt = F( x( ϕ)) dϕ = F( x) dx dϕ dt dϕ a α C (w konkretnej parametryzacji staje się zwyklą calką Riemanna) Przyklad: C: x( φ) = cos φ, y( φ) = sin φ, φ [, π] (pólokrąg o promieniu jednostkowym) C π xdx x ydy d d d + ( ) = [cos φ (cos φ) + cos φ φ sin φ (sin φ)] = φ= 3 π π cos sin φ π φ π = + = C 74
75 Całka krzywoliniowa niezorientowana b dx ))... dxk JC = f ds = f( x( t + + dt dt dt J C C C a Tw. Związek z calką zorientowaną: Fd x = Fds, F = F F cos αα, kąt miedzy dx i F C = J C s s k Zastosowanie (fizyka): praca W = Fds = F dx+ π C: x = acos φ, y = bsin φ, φ [, ] ćwiartka elipsy kx F = sprężyna zamocowana w srodku ky C sin, cos, x y ( ) sin cos π / k W = k( a b ) cos φd(cos φ) = ( a b ) s C x F y dy F dz dx = a φdφ dy = b φdφ F dx + F dy = k a b φ φdφ + z 75
76 Tw. Greena Krzywą zamkniętą nazywamy konturem. Nich kontur C będzie brzegiem zbioru D. Kontur jest zorientowany dodatnio jeśli okala zbiór D w taki sposób, że D znajduje się po lewej stronie. Zbiór normalny D względem osi Ox to zbiór dający się zapisać jako D = {( x, y): f ( x) y f ( x), x [ a, b]}, f, f :[ a, b] R Zbiór normalny D względem osi Oy to zbiór dający się zapisać jako D = {( x, y) : g ( y) x g Tw. Greena D D- zbiór normalny ze względu na Ox i Oy, C = D jego brzeg zorientowany dodatnio Wtedy Q Pdx + Qdy = x b f ( x) P P D: dxdy = dx dy = dx[ P( x, f D ( y), x [ c, d] }, g, g :[ c, d] R P dxdy. y ( )) (, ( ))] y y D a f ( x) a C C = Pdx Pdx = Pdx C C D d g ( y) d b x P x f x = Pdx Pdx = Q Q dxdy = dy dx = dt[ Q( g ( y), y) Q( g ( y), y)] = Qdy Qdy = Qdy x x D c g ( y) c K K D 76
77 Pole potencjalne (fiz.) V( x, y) potencjal F x V V V V F F x =, Fy =, = = x y x y y x y x Fy Fx Fxdx + Fydy = dxdy = Fxdx + Fydy = Fxdx + Fydy (rys.) x y C D K K (Praca w polu potencjalnym nie zależy od drogi - można wprowadzić energię potencjalną. W poprzednim przykladzie z pracą na ćwiartce elipsy wynik wtedy natychmiastowy: W = V - V ) (w powyższym wzorze zauważamy rot grad V = ) y jest 77
78 Całka powierzchniowa niezorientowana (wspólrzędne kartezjańskie) Plat regularny S = {( x, y, z) : z = f( x, y),( x, y) D} Element powierzchni : ds = + f + f dxdy x y Pole powierzchni plata regularneg o : S = + f + f dxdy Calka powierzchniowa niezorientowana: S S g( x, y, z) ds = g( x, y, f ( x, y) + f + f dxdy D D x y (wspólrzędne krzywoliniowe) x= xuv (, ), y= yuv (, ), z= zuv (, ), ( uv, ) D x y gxyzds (,, ) = gxuv ( (, ), y( u, v), z( u, v)) J + J + J dudv D ( yz, ) ( xz, ) ( xy, ) J =, J =, J3 = ( uv, ) ( uv, ) ( uv, ) 3 78
79 Przyklad (wspólrzędne kuliste) x = rsinθ cos φ, y = rsinθ sin φ, z = rcosθ J J J 3 rcosθsin φ rsinθ cosφ = = r r sinθ sin rcosθ cosφ rsinθsinφ = = r r sinθ rcosθ cosφ rsinθsinφ = = r rcosθsin φ rsinθ cosφ J + J + J3 = r sinθ θ cosφ sin θ sinφ sinθ cosθ 79
80 Całka powierzchniowa zorientowana F S R 3 : - pole wektorowe S plat regularny n zewnętrzny wektor normalny Calka powierzchniowa zorientowana pola F lub strumień pola F: I = F( x, y, z) n( x, y, z) ds strumień S Niech F = ( F, F, F ). Wtedy oznaczamy I = S 3 x y D 3 Jeżeli S dana jest równaniem z = f( x, y), to n = ( fx, fy,) + f + f Ff x Ff y + F3 I = ds = ( Ff x F f y + F3) dxdy + f + f S F dydz + F dxdz + F dxdy x y 8
81 V Tw. Gaussa (Ostrogradskiego-Gaussa) div Fdxdydz= F nds S Slownie: calka po objętosci V z dywergencji z pola F równa się strumieniowi wyplywającemu przez powierzchnie S ograniczającą V F F F3 + + dxdydz = Fdydz + Fdxd dx dy dz z+ Fdxd 3 y V S D: Niech V będzie obszarem normalnym względem plaszczyzny Oxy, ograniczonym funkcjami gxy (, ) i dxy (, ). Wtedy g( x, y) F 3 F 3 I3 = dxdydz = dz dxdy F3( x, y, g( x, y)) F3( x, y, d( x dz = dz (, y)) ) dxdy V D d( x, y) D Oznaczmy S = S + S, gdzie S dana jest przez z = g( x, y) a S przez z = d( x, y). I ' = F dxdy = F dxdy + F dxdy = F ( x, y, g( x, y)) dxdy F ( x, y, d( x, y)) dxdy S S S D D Znak wynika z przeciwnej orientacji S. Zatem I = I '. Podobnie pokazujemy, że I = I ' oraz I = I 3 3 '. Jeżeli V nie jest normalny, to dzielimy go na podzbiory normalne. 8
82 Tw. Stokesa Tw. Niech K będzie regularnym konturem bedącym brzegiem plata regularnego S. Orientacje K i S są zgodne. Niech Fi mają ciągle pochodne. Wtedy F dl = rotf n ds K S Cyrkulacja pola F po krzywej zamkniętej K jest równa calce zorientowanej z rotacji pola F po placie S. Inna notacja: F F F F F F + + = Fdx Fdy Fdz 3 dydz dxdz dxdy y z z x x y K S 8
83 Formy różniczkowe (fiz.) Różniczka zewnętrzna stopnia p : ax (,..., x) dx dx... dx, p n, wszystkie i różne i... i n i i i k dx dx = dx dx dx dx = i j j i i i Suma różniczek tego samego stopnia: forma różniczkowa zewnętrzna α = i... i a p ( x,..., x ) dx dx... dx i... ip j... j p Przyklady: Pdx + Qdy, Pdy dz + Qdz dx + Rdx dy, A dx dy dz Dodawanie analogiczne do dodawania wielomianów. Mnożenie: p i... i j... j i i j p q p n i i i p p+ q α β= a b dx... dx dx... dx = ( ) β α q dα = p p Różniczkowanie:..... i... i p a x a dx + + dx dx. dx x n i... i i... i P Q Q P d( Pdx+ Qdy) = dy dx+ dx dy = dx dy y x x y d( Pdy dz + Qdz dx + Rdx dy) = ( P + Q + R ) dx dy dz x y z j q n i i p 83
84 a i... i i... i p a p = = x x x x k l l k dda ( ) α jest formą zupelną, jeżeli γ : α = dγ, α jest formą zamknietą, jeżeli dα = Zamiana zmiennych x t: ( xi,..., xi ) a = a x x dt dt V p (,..., )... p i... i n p i... i ( t,..., tp ) p Calkowanie po hiperpowierzchni V: a = A( t) dt... dt = A( t) dt... dt (zwykla calka Riemanna) D p D Ogólne Tw. Stokesa: V hiperpowierzchnia zorientowana, Jeżeli wspólczynniki formy a = to V a = V da i... i p a p V jej brzeg i... i ( x) dx... są klasy C na, p i dx i V + V p Przyklady: Tw. Greena, Gaussa, Stokesa, także f( x) dx = F( b) - F( a), bo df( x) df( x) = dx = f ( x) dx, V = { a, b} dx [ a, b] 84
Analiza Matematyczna 3 Całki wielowymiarowe
 [wersja z X 008] Analiza Matematyczna 3 Całki wielowymiarowe Konspekt wykładu dla studentów II r. fizyki Uniwersytet Jana Kochanowskiego 008/009 Wojciech Broniowski Powierzchnie kawałkami gładkie RYS Sfera
[wersja z X 008] Analiza Matematyczna 3 Całki wielowymiarowe Konspekt wykładu dla studentów II r. fizyki Uniwersytet Jana Kochanowskiego 008/009 Wojciech Broniowski Powierzchnie kawałkami gładkie RYS Sfera
Analiza Matematyczna 3
 [wersja z 5 X ] Analiza Matematyczna 3 Konspekt wykładu dla studentów II r. fizyki Uniwersytet Jana Kochanowskiego / Wojciech Broniowski Powierzchnie kawałkami gładkie RYS Sfera Aleandra Butelka Kleina
[wersja z 5 X ] Analiza Matematyczna 3 Konspekt wykładu dla studentów II r. fizyki Uniwersytet Jana Kochanowskiego / Wojciech Broniowski Powierzchnie kawałkami gładkie RYS Sfera Aleandra Butelka Kleina
[wersja z 5 X 2010] Wojciech Broniowski
![[wersja z 5 X 2010] Wojciech Broniowski](/thumbs/68/58363271.jpg "[wersja z 5 X 2010] Wojciech Broniowski") [wersja z 5 X 1] Analiza Matematyczna część 4 Konspekt wykładu dla studentów fizyki Akademia Świętokrzyska 1/11 Wojciech Broniowski 1 Analiza funkcji wielu zmiennych Przestrzeń wektorowa unormowana : X
[wersja z 5 X 1] Analiza Matematyczna część 4 Konspekt wykładu dla studentów fizyki Akademia Świętokrzyska 1/11 Wojciech Broniowski 1 Analiza funkcji wielu zmiennych Przestrzeń wektorowa unormowana : X
Analiza Matematyczna część 4
 [wersja z 1 IV 8] Analiza Matematyczna część 4 Konspekt wykładu dla studentów fizyki/informatyki Akademia Świętokrzyska 7/8 Wojciech Broniowski 1 Równania różniczkowe Definicje, klasyfikacja Równanie różniczkowe
[wersja z 1 IV 8] Analiza Matematyczna część 4 Konspekt wykładu dla studentów fizyki/informatyki Akademia Świętokrzyska 7/8 Wojciech Broniowski 1 Równania różniczkowe Definicje, klasyfikacja Równanie różniczkowe
Analiza Matematyczna 3 Całki wielowymiarowe
 [wersja z 6 X 9] Analiza Matematczna 3 Całki wielowmiarowe Konspekt wkładu dla studentów II r. fizki Uniwerstet Jana Kochanowskiego 9/ Wojciech Broniowski Powierzchnie kawałkami gładkie RYS Sfera Aleandra
[wersja z 6 X 9] Analiza Matematczna 3 Całki wielowmiarowe Konspekt wkładu dla studentów II r. fizki Uniwerstet Jana Kochanowskiego 9/ Wojciech Broniowski Powierzchnie kawałkami gładkie RYS Sfera Aleandra
Rachunek różniczkowy i całkowy w przestrzeniach R n
 Rachunek różniczkowy i całkowy w przestrzeniach R n Na dzisiejszym wykładzie rozważać będziemy funkcje f : R m R n Każda taka funkcję f można przedstawić jako wektor funkcji (f 1, f 2,, f n ), gdzie każda
Rachunek różniczkowy i całkowy w przestrzeniach R n Na dzisiejszym wykładzie rozważać będziemy funkcje f : R m R n Każda taka funkcję f można przedstawić jako wektor funkcji (f 1, f 2,, f n ), gdzie każda
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
22. CAŁKA KRZYWOLINIOWA SKIEROWANA
 CAŁA RZYWOLINIOWA SIEROWANA Niech łuk o równaniach parametrycznych: x x(t), y y(t), a < t < b, będzie łukiem regularnym skierowanym, tzn łukiem w którym przyjęto punkt A(x(a), y(a)) za początek łuku, zaś
CAŁA RZYWOLINIOWA SIEROWANA Niech łuk o równaniach parametrycznych: x x(t), y y(t), a < t < b, będzie łukiem regularnym skierowanym, tzn łukiem w którym przyjęto punkt A(x(a), y(a)) za początek łuku, zaś
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne.
 Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Uniwersytet Warmińsko-Mazurski w Olsztynie
 Uniwersytet Warmińsko-Mazurski w Olsztynie ZETAW II Całka podwójna.. Obliczyć całki iterowane (a 4 4 2 ( (x + y ( 2 4 ( y x y dy dx y 3 x 2 + y 2 dx dy. 2. Zmienić kolejność całkowania (a (d 2 e ( 2x x
Uniwersytet Warmińsko-Mazurski w Olsztynie ZETAW II Całka podwójna.. Obliczyć całki iterowane (a 4 4 2 ( (x + y ( 2 4 ( y x y dy dx y 3 x 2 + y 2 dx dy. 2. Zmienić kolejność całkowania (a (d 2 e ( 2x x
Niektóre zastosowania całki krzywoliniowej niezorientowanej 1.Długość l łuku zwykłego gładkiego Γ
 Niektóre zastosowania całki krzywoliniowej niezorientowanej 1.ługość l łuku zwykłego gładkiego l = 1dl = b a (x (t)) 2 + (y (t) 2 ) + (z (t)) 2 dt 2.Pole powierzchni walcowej = {(x, y, z) : (x, y), 0 z
Niektóre zastosowania całki krzywoliniowej niezorientowanej 1.ługość l łuku zwykłego gładkiego l = 1dl = b a (x (t)) 2 + (y (t) 2 ) + (z (t)) 2 dt 2.Pole powierzchni walcowej = {(x, y, z) : (x, y), 0 z
Matematyka II. Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 2018/2019 wykład 13 (27 maja)
") Matematyka II Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 208/209 wykład 3 (27 maja) Całki niewłaściwe przedział nieograniczony Rozpatrujemy funkcje ciągłe określone na zbiorach < a, ),
Matematyka II Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 208/209 wykład 3 (27 maja) Całki niewłaściwe przedział nieograniczony Rozpatrujemy funkcje ciągłe określone na zbiorach < a, ),
Całki krzywoliniowe skierowane
 Całki krzywoliniowe skierowane Zamiana całki krzywoliniowej skierowanej na całkę pojedyńcza. Twierdzenie Greena. Zastosowania całki krzywoliniowej skierowanej. Małgorzata Wyrwas Katedra Matematyki Wydział
Całki krzywoliniowe skierowane Zamiana całki krzywoliniowej skierowanej na całkę pojedyńcza. Twierdzenie Greena. Zastosowania całki krzywoliniowej skierowanej. Małgorzata Wyrwas Katedra Matematyki Wydział
IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. - funkcja dwóch zmiennych,
 IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. Definicja 1.1. Niech D będzie podzbiorem przestrzeni R n, n 2. Odwzorowanie f : D R nazywamy
IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. Definicja 1.1. Niech D będzie podzbiorem przestrzeni R n, n 2. Odwzorowanie f : D R nazywamy
RÓŻNICZKOWANIE FUNKCJI WIELU ZMIENNYCH: rachunek pochodnych dla funkcji wektorowych. Pochodne cząstkowe funkcji rzeczywistej wielu zmiennych
 RÓŻNICZKOWANIE FUNKCJI WIELU ZMIENNYCH: rachunek pochodnych dla funkcji wektorowych Pochodne cząstkowe funkcji rzeczywistej wielu zmiennych wyliczamy według wzoru (x, x 2,..., x n ) f(x, x 2,..., x n )
RÓŻNICZKOWANIE FUNKCJI WIELU ZMIENNYCH: rachunek pochodnych dla funkcji wektorowych Pochodne cząstkowe funkcji rzeczywistej wielu zmiennych wyliczamy według wzoru (x, x 2,..., x n ) f(x, x 2,..., x n )
II. FUNKCJE WIELU ZMIENNYCH
 II. FUNKCJE WIELU ZMIENNYCH 1. Zbiory w przestrzeni R n Ustalmy dowolne n N. Definicja 1.1. Zbiór wszystkich uporzadkowanych układów (x 1,..., x n ) n liczb rzeczywistych, nazywamy przestrzenią n-wymiarową
II. FUNKCJE WIELU ZMIENNYCH 1. Zbiory w przestrzeni R n Ustalmy dowolne n N. Definicja 1.1. Zbiór wszystkich uporzadkowanych układów (x 1,..., x n ) n liczb rzeczywistych, nazywamy przestrzenią n-wymiarową
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ
 METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 3 Elementy analizy pól skalarnych, wektorowych i tensorowych Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej 1 Analiza
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 3 Elementy analizy pól skalarnych, wektorowych i tensorowych Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej 1 Analiza
Całki krzywoliniowe. SNM - Elementy analizy wektorowej - 1
 SNM - Elementy analizy wektorowej - 1 Całki krzywoliniowe Definicja (funkcja wektorowa jednej zmiennej) Funkcją wektorową jednej zmiennej nazywamy odwzorowanie r : I R 3, gdzie I oznacza przedział na prostej,
SNM - Elementy analizy wektorowej - 1 Całki krzywoliniowe Definicja (funkcja wektorowa jednej zmiennej) Funkcją wektorową jednej zmiennej nazywamy odwzorowanie r : I R 3, gdzie I oznacza przedział na prostej,
3. Funkcje wielu zmiennych
 3 Funkcje wielu zmiennych 31 Ciagłość Zanim podamy definicję ciagłości dla funkcji wielu zmiennych wprowadzimy bardzo ogólne i abstrakcyjne pojęcie przestrzeni metrycznej Przestrzeń metryczna Metryka w
3 Funkcje wielu zmiennych 31 Ciagłość Zanim podamy definicję ciagłości dla funkcji wielu zmiennych wprowadzimy bardzo ogólne i abstrakcyjne pojęcie przestrzeni metrycznej Przestrzeń metryczna Metryka w
Całka podwójna po prostokącie
 Całka podwójna po prostokącie Rozważmy prostokąt = {(x, y) R : a x b, c y d}, gdzie a, b, c, d R, oraz funkcję dwóch zmiennych f : R ograniczoną w tym prostokącie. rostokąt dzielimy na n prostokątów i
Całka podwójna po prostokącie Rozważmy prostokąt = {(x, y) R : a x b, c y d}, gdzie a, b, c, d R, oraz funkcję dwóch zmiennych f : R ograniczoną w tym prostokącie. rostokąt dzielimy na n prostokątów i
Funkcje wielu zmiennych
 Funkcje wielu zmiennych Wykresy i warstwice funkcji wielu zmiennych. Granice i ciagłość funkcji wielu zmiennych. Pochodne czastkowe funkcji wielu zmiennych. Gradient. Pochodna kierunkowa. Różniczka zupełna.
Funkcje wielu zmiennych Wykresy i warstwice funkcji wielu zmiennych. Granice i ciagłość funkcji wielu zmiennych. Pochodne czastkowe funkcji wielu zmiennych. Gradient. Pochodna kierunkowa. Różniczka zupełna.
ANALIZA MATEMATYCZNA Z ELEMENTAMI STATYSTYKI MATEMATYCZNEJ
 ANALIZA MATEMATYCZNA Z ELEMENTAMI STATYSTYKI MATEMATYCZNEJ FUNKCJE DWÓCH ZMIENNYCH RZECZYWISTYCH Definicja 1. Niech A będzie dowolnym niepustym zbiorem. Metryką w zbiorze A nazywamy funkcję rzeczywistą
ANALIZA MATEMATYCZNA Z ELEMENTAMI STATYSTYKI MATEMATYCZNEJ FUNKCJE DWÓCH ZMIENNYCH RZECZYWISTYCH Definicja 1. Niech A będzie dowolnym niepustym zbiorem. Metryką w zbiorze A nazywamy funkcję rzeczywistą
ELEKTROTECHNIKA Semestr 2 Rok akad / ZADANIA Z MATEMATYKI Zestaw Oblicz pochodne cząstkowe rzędu drugiego funkcji:
 ZADANIA Z MATEMATYKI Zestaw. Oblicz pochodne cząstkowe funkcji: a) f(x, y) = x sin y x b) f(x, y) = e y +x 2 c) f(x, y, z) = z cos x+y z 2. Oblicz pochodne cząstkowe rzędu drugiego funkcji: 3. Wyznacz
ZADANIA Z MATEMATYKI Zestaw. Oblicz pochodne cząstkowe funkcji: a) f(x, y) = x sin y x b) f(x, y) = e y +x 2 c) f(x, y, z) = z cos x+y z 2. Oblicz pochodne cząstkowe rzędu drugiego funkcji: 3. Wyznacz
ANALIZA MATEMATYCZNA Z ELEMENTAMI STATYSTYKI MATEMATYCZNEJ
 ANALIZA MATEMATYCZNA Z ELEMENTAMI STATYSTYKI MATEMATYCZNEJ FUNKCJE WÓCH ZMIENNYCH RZECZYWISTYCH efinicja 1. Niech A będzie dowolnym niepustym zbiorem. Metryką w zbiorze A nazywamy funkcję rzeczywistą d
ANALIZA MATEMATYCZNA Z ELEMENTAMI STATYSTYKI MATEMATYCZNEJ FUNKCJE WÓCH ZMIENNYCH RZECZYWISTYCH efinicja 1. Niech A będzie dowolnym niepustym zbiorem. Metryką w zbiorze A nazywamy funkcję rzeczywistą d
x y = 2z. + 2y, z 2y df
 . Funkcje wielu zmiennych i funkcje uwikłane Zadanie.. Obliczyć przybliżoną wartość wyrażenia (, ) (,). Korzystamy z przybliżenia f, y) f, y ) + x x, y ) + y y, y ), gdzie x = x x a y = y y. Przybliżenie
. Funkcje wielu zmiennych i funkcje uwikłane Zadanie.. Obliczyć przybliżoną wartość wyrażenia (, ) (,). Korzystamy z przybliżenia f, y) f, y ) + x x, y ) + y y, y ), gdzie x = x x a y = y y. Przybliżenie
24. CAŁKA POWIERZCHNIOWA ZORIENTOWANA
 4. CAŁA POWIERZCHNIOWA ZORIENTOWANA Płat powierzchniowy gładki o równaniach parametrycznych: x = x( u, v ), y = y( u, v ), z = z( u, v ),, (u,v) w którym rozróżniamy dwie jego stron dodatnią i ujemną.
4. CAŁA POWIERZCHNIOWA ZORIENTOWANA Płat powierzchniowy gładki o równaniach parametrycznych: x = x( u, v ), y = y( u, v ), z = z( u, v ),, (u,v) w którym rozróżniamy dwie jego stron dodatnią i ujemną.
WYKŁAD Z ANALIZY MATEMATYCZNEJ I. dr. Elżbieta Kotlicka. Centrum Nauczania Matematyki i Fizyki
 WYKŁA Z ANALIZY MATEMATYCZNEJ I dr. Elżbieta Kotlicka Centrum Nauczania Matematyki i Fizyki http://im0.p.lodz.pl/~ekot Łódź 2005 Spis treści 1. Przestrzenie metryczne. 4 2. Granica i ciągłość funkcji
WYKŁA Z ANALIZY MATEMATYCZNEJ I dr. Elżbieta Kotlicka Centrum Nauczania Matematyki i Fizyki http://im0.p.lodz.pl/~ekot Łódź 2005 Spis treści 1. Przestrzenie metryczne. 4 2. Granica i ciągłość funkcji
Matematyka z el. statystyki, # 4 /Geodezja i kartografia I/
 Matematyka z el. statystyki, # 4 /Geodezja i kartografia I/ dr n. mat. Zdzisław Otachel Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Akademicka 15, p.211a, bud. Agro
Matematyka z el. statystyki, # 4 /Geodezja i kartografia I/ dr n. mat. Zdzisław Otachel Uniwersytet Przyrodniczy w Lublinie Katedra Zastosowań Matematyki i Informatyki ul. Akademicka 15, p.211a, bud. Agro
Zestaw zadań z Analizy Matematycznej II 18/19. Konwencja: pierwsze litery alfabetu są parametrami, do tego zazwyczaj dodatnimi
 Literatura pomocnicza Zestaw zadań z Analizy Matematycznej II 8/9 G.M. Fichtenholz - Rachunek różniczkowy i całkowy. B. Demidowicz - Zbiór zadań z analizy matematycznej. T 2,3 Krysicki, Włodarski - Analiza
Literatura pomocnicza Zestaw zadań z Analizy Matematycznej II 8/9 G.M. Fichtenholz - Rachunek różniczkowy i całkowy. B. Demidowicz - Zbiór zadań z analizy matematycznej. T 2,3 Krysicki, Włodarski - Analiza
Analiza matematyczna 2 zadania z odpowiedziami
 Analiza matematyczna zadania z odpowiedziami Maciej Burnecki strona główna Spis treści I Całki niewłaściwe pierwszego rodzaju II Całki niewłaściwe drugiego rodzaju 5 III Szeregi liczbowe 6 IV Szeregi potęgowe
Analiza matematyczna zadania z odpowiedziami Maciej Burnecki strona główna Spis treści I Całki niewłaściwe pierwszego rodzaju II Całki niewłaściwe drugiego rodzaju 5 III Szeregi liczbowe 6 IV Szeregi potęgowe
z pokryciem (O i ) i I rozkładu jedności (α i ) i I. Zauważmy najpierw, że ( i I α i )ω dω = d(1 ω) = d d(α i ω). Z drugiej jednak strony
 i I rozkładu jedności (α i ) i I. Zauważmy najpierw, że ( i I α i )ω dω = d(1 ω) = d d(α i ω). Z drugiej jednak strony") Dowód: Niech M będzie jak w założeniach twierdzenia. Weźmy skończony atlas O i, ϕ i ) na M zgodny z orientacją. Zbiór indeksów I może być skończony, gdyż rozmaitość M jest zwarta. Õi, ϕ i ) oznaczać będzie
Dowód: Niech M będzie jak w założeniach twierdzenia. Weźmy skończony atlas O i, ϕ i ) na M zgodny z orientacją. Zbiór indeksów I może być skończony, gdyż rozmaitość M jest zwarta. Õi, ϕ i ) oznaczać będzie
Analiza wektorowa. Teoria pola.
 Analiza wektorowa. Teoria pola. Pole skalarne Pole wektorowe ϕ = ϕ(x, y, z) A = A x (x, y, z) i x + A y (x, y, z) i y + A z (x, y, z) i z Gradient grad ϕ = ϕ x i x + ϕ y i y + ϕ z i z Jeśli przemieścimy
Analiza wektorowa. Teoria pola. Pole skalarne Pole wektorowe ϕ = ϕ(x, y, z) A = A x (x, y, z) i x + A y (x, y, z) i y + A z (x, y, z) i z Gradient grad ϕ = ϕ x i x + ϕ y i y + ϕ z i z Jeśli przemieścimy
Analiza Matematyczna II dla Inżynierii Biomedycznej Lista zadań
 Analiza Matematyczna II dla Inżynierii Biomedycznej Lista zadań Jacek Cichoń, WPPT PWr, 05/6 Pochodne i całki funkcji jednej zmiennej Zadanie Oblicz pierwszą i drugą pochodną następujących funkcji. f(x)
Analiza Matematyczna II dla Inżynierii Biomedycznej Lista zadań Jacek Cichoń, WPPT PWr, 05/6 Pochodne i całki funkcji jednej zmiennej Zadanie Oblicz pierwszą i drugą pochodną następujących funkcji. f(x)
y(t) = y 0 + R sin t, t R. z(t) = h 2π t
 = y 0 + R sin t, t R. z(t) = h 2π t") SNM - Elementy analizy wektorowej - 1 Całki krzywoliniowe Definicja (funkcja wektorowa jednej zmiennej) Funkcją wektorową jednej zmiennej nazywamy odwzorowanie r : I R 3, gdzie I oznacza przedział na prostej,
SNM - Elementy analizy wektorowej - 1 Całki krzywoliniowe Definicja (funkcja wektorowa jednej zmiennej) Funkcją wektorową jednej zmiennej nazywamy odwzorowanie r : I R 3, gdzie I oznacza przedział na prostej,
opracował Maciej Grzesiak Całki krzywoliniowe
 opracował Maciej Grzesiak Całki krzywoliniowe 1. Definicja całki krzywoliniowej nieskierowanej Rozważmy następujący problem. Dany jest przewód elektryczny na którym rozmieszczone są ładunki. Przypuśćmy,
opracował Maciej Grzesiak Całki krzywoliniowe 1. Definicja całki krzywoliniowej nieskierowanej Rozważmy następujący problem. Dany jest przewód elektryczny na którym rozmieszczone są ładunki. Przypuśćmy,
ANALIZA MATEMATYCZNA 2 zadania z odpowiedziami
 ANALIZA MATEMATYCZNA zadania z odpowiedziami Maciej Burnecki strona główna Spis treści Całki niewłaściwe pierwszego rodzaju Całki niewłaściwe drugiego rodzaju Szeregi liczbowe 4 4 Szeregi potęgowe 5 5
ANALIZA MATEMATYCZNA zadania z odpowiedziami Maciej Burnecki strona główna Spis treści Całki niewłaściwe pierwszego rodzaju Całki niewłaściwe drugiego rodzaju Szeregi liczbowe 4 4 Szeregi potęgowe 5 5
Funkcje dwóch zmiennych
 Maciej Grzesiak Instytut Matematyki Politechniki Poznańskiej Funkcje dwóch zmiennych 1. Funkcje dwóch zmiennych: pojęcia podstawowe Definicja 1. Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach
Maciej Grzesiak Instytut Matematyki Politechniki Poznańskiej Funkcje dwóch zmiennych 1. Funkcje dwóch zmiennych: pojęcia podstawowe Definicja 1. Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach
Spis treści 1. Macierze, wyznaczniki, równania liniowe 2 2. Geometria analityczna 7 3. Granice, pochodne funkcji i ich zastosowania 10 4.
 Spis treści Macierze wyznaczniki równania liniowe Geometria analityczna 7 Granice pochodne funkcji i ich zastosowania 0 4 Liczby zespolone 6 5 Całki nieoznaczone 8 6 Zastosowania geometryczne całek 0 7
Spis treści Macierze wyznaczniki równania liniowe Geometria analityczna 7 Granice pochodne funkcji i ich zastosowania 0 4 Liczby zespolone 6 5 Całki nieoznaczone 8 6 Zastosowania geometryczne całek 0 7
Z52: Algebra liniowa Zagadnienie: Zastosowania algebry liniowej Zadanie: Operatory różniczkowania, zagadnienie brzegowe.
 Z5: Algebra liniowa Zagadnienie: Zastosowania algebry liniowej Zadanie: Operatory różniczkowania zagadnienie brzegowe Dyskretne operatory różniczkowania Numeryczne obliczanie pochodnych oraz rozwiązywanie
Z5: Algebra liniowa Zagadnienie: Zastosowania algebry liniowej Zadanie: Operatory różniczkowania zagadnienie brzegowe Dyskretne operatory różniczkowania Numeryczne obliczanie pochodnych oraz rozwiązywanie
Rachunek różniczkowy funkcji wielu zmiennych
 Wydział Matematyki Stosowanej Zestaw zadań nr 7 Akademia Górniczo-Hutnicza w Krakowie WFiIS, informatyka stosowana, I rok Elżbieta Adamus 13 grudnia 2018r. Rachunek różniczkowy funkcji wielu zmiennych
Wydział Matematyki Stosowanej Zestaw zadań nr 7 Akademia Górniczo-Hutnicza w Krakowie WFiIS, informatyka stosowana, I rok Elżbieta Adamus 13 grudnia 2018r. Rachunek różniczkowy funkcji wielu zmiennych
Funkcje dwóch zmiennych
 Funkcje dwóch zmiennych Andrzej Musielak Str Funkcje dwóch zmiennych Wstęp Funkcja rzeczywista dwóch zmiennych to funkcja, której argumentem jest para liczb rzeczywistych, a wartością liczba rzeczywista.
Funkcje dwóch zmiennych Andrzej Musielak Str Funkcje dwóch zmiennych Wstęp Funkcja rzeczywista dwóch zmiennych to funkcja, której argumentem jest para liczb rzeczywistych, a wartością liczba rzeczywista.
Analiza Matematyczna Praca domowa
 Analiza Matematyczna Praca domowa J. de Lucas Zadanie 1. Pokazać, że dla wszystkich n naturalnych ( n ) exp kx k dx 1 dx n = 1 n (e k 1). (0,1) n k=1 n! k=1 Zadanie. Obliczyć dla dowolnego n. (0,1) n (x
Analiza Matematyczna Praca domowa J. de Lucas Zadanie 1. Pokazać, że dla wszystkich n naturalnych ( n ) exp kx k dx 1 dx n = 1 n (e k 1). (0,1) n k=1 n! k=1 Zadanie. Obliczyć dla dowolnego n. (0,1) n (x
Spis treści. Przedmowa do wydania piątego
 Zadania z matematyki wyższej. Cz. 1, [Logika, równania liniowe, wektory, proste i płaszczyzny, ciągi, szeregi, rachunek różniczkowy, funkcje uwikłane, krzywe i powierzchnie] / Roman Leitner, Wojciech Matuszewski,
Zadania z matematyki wyższej. Cz. 1, [Logika, równania liniowe, wektory, proste i płaszczyzny, ciągi, szeregi, rachunek różniczkowy, funkcje uwikłane, krzywe i powierzchnie] / Roman Leitner, Wojciech Matuszewski,
Całki podwójne. Definicja całki podwójnej. Jacek Kłopotowski. 25 maja Katedra Matematyki i Ekonomii Matematycznej
 Definicja całki podwójnej Katedra Matematyki i Ekonomii Matematycznej 25 maja 2016 Definicja całki podwójnej Załóżmy, że f : K R, gdzie K = a, b c, d R 2, jest funkcją ograniczoną. Niech x 0, x 1,...,
Definicja całki podwójnej Katedra Matematyki i Ekonomii Matematycznej 25 maja 2016 Definicja całki podwójnej Załóżmy, że f : K R, gdzie K = a, b c, d R 2, jest funkcją ograniczoną. Niech x 0, x 1,...,
Rachunek całkowy funkcji wielu zmiennych
 Rachunek całkowy funkcji wielu zmiennych Całki potrójne wykład z MATEMATYKI Budownictwo studia niestacjonarne sem. II, rok ak. 2008/2009 Katedra Matematyki Wydział Informatyki olitechnika Białostocka 1
Rachunek całkowy funkcji wielu zmiennych Całki potrójne wykład z MATEMATYKI Budownictwo studia niestacjonarne sem. II, rok ak. 2008/2009 Katedra Matematyki Wydział Informatyki olitechnika Białostocka 1
ANALIZA MATEMATYCZNA
 ANALIZA MATEMATYCZNA TABLICE Spis treści: 1.) Pochodne wzory 2 2.) Całki wzory 3 3.) Kryteria zbieżności szeregów 4 4.) Przybliżona wartość wyrażenia 5 5.) Równanie płaszczyzny stycznej i prostej normalnej
ANALIZA MATEMATYCZNA TABLICE Spis treści: 1.) Pochodne wzory 2 2.) Całki wzory 3 3.) Kryteria zbieżności szeregów 4 4.) Przybliżona wartość wyrażenia 5 5.) Równanie płaszczyzny stycznej i prostej normalnej
AB = x a + yb y a + zb z a 1
 1. Wektory w przestrzeni trójwymiarowej EFINICJA. Uporzadkowana pare punktów (A, B) nazywamy wektorem i oznaczamy AB. Punkt A to poczatek wektora, punkt B to koniec wektora. EFINICJA. Je±li B = A, to wektor
1. Wektory w przestrzeni trójwymiarowej EFINICJA. Uporzadkowana pare punktów (A, B) nazywamy wektorem i oznaczamy AB. Punkt A to poczatek wektora, punkt B to koniec wektora. EFINICJA. Je±li B = A, to wektor
Spis treści 1. Liczby zespolone 2 2. Macierze, wyznaczniki, równania liniowe 4 3. Geometria analityczna 9 4. Granice, pochodne funkcji i ich
 Spis treści Liczby zespolone Macierze wyznaczniki równania liniowe 4 Geometria analityczna 9 4 Granice pochodne funkcji i ich zastosowania 5 Całki nieoznaczone 8 6 Zastosowania geometryczne całek 0 7 Pochodne
Spis treści Liczby zespolone Macierze wyznaczniki równania liniowe 4 Geometria analityczna 9 4 Granice pochodne funkcji i ich zastosowania 5 Całki nieoznaczone 8 6 Zastosowania geometryczne całek 0 7 Pochodne
Wykład 9. Matematyka 3, semestr zimowy 2011/ listopada 2011
 Wykład 9. Matematyka 3, semestr zimowy 2011/2012 4 listopada 2011 W trakcie poprzedniego wykładu zdefiniowaliśmy pojęcie k-kowektora na przestrzeni wektorowej. Wprowadziliśmy także iloczyn zewnętrzny wielokowektorów
Wykład 9. Matematyka 3, semestr zimowy 2011/2012 4 listopada 2011 W trakcie poprzedniego wykładu zdefiniowaliśmy pojęcie k-kowektora na przestrzeni wektorowej. Wprowadziliśmy także iloczyn zewnętrzny wielokowektorów
Analiza Matematyczna. Zastosowania Całek
 Analiza Matematyczna. Zastosowania Całek Aleksander Denisiuk denisiuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 8-45 Gdańsk 9 maja 217
Analiza Matematyczna. Zastosowania Całek Aleksander Denisiuk denisiuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 8-45 Gdańsk 9 maja 217
Rozdział 3. Tensory. 3.1 Krzywoliniowe układy współrzędnych
 Rozdział 3 Tensory 3.1 Krzywoliniowe układy współrzędnych W kartezjańskim układzie współrzędnych punkty P są scharakteryzowane przez współrzędne kartezjańskie wektora wodzącego r = x 1 i 1 + x 2 i 2 +
Rozdział 3 Tensory 3.1 Krzywoliniowe układy współrzędnych W kartezjańskim układzie współrzędnych punkty P są scharakteryzowane przez współrzędne kartezjańskie wektora wodzącego r = x 1 i 1 + x 2 i 2 +
(8) Oblicz wyznacznik dowolnie wybranej macierzy stopnia czwartego. (9) Rozwi aż podany układ równań stosuj ac wzory Cramera:
 Oblicz wyznacznik dowolnie wybranej macierzy stopnia czwartego. (9) Rozwi aż podany układ równań stosuj ac wzory Cramera:") Zadania przygotowuj ace do kolokwium (budownictwo, studia niestacjonarne, drugi semestr, 209) [7III] () Podaj przykład dowolnej macierzy A drugiego stopnia Oblicz A A T + A T A (2) Podaj przykład dowolnej
Zadania przygotowuj ace do kolokwium (budownictwo, studia niestacjonarne, drugi semestr, 209) [7III] () Podaj przykład dowolnej macierzy A drugiego stopnia Oblicz A A T + A T A (2) Podaj przykład dowolnej
Podstawy elektromagnetyzmu. Wykład 1. Rachunek wektorowy
 Podstawy elektromagnetyzmu Wykład 1 Rachunek wektorowy Co to jest,,pole? Matematyka: odwzorowanie Rn Rm które przypisuje każdemu punktowi wartość (skalarną lub wektorową). Fizyka: Własność przestrzeni
Podstawy elektromagnetyzmu Wykład 1 Rachunek wektorowy Co to jest,,pole? Matematyka: odwzorowanie Rn Rm które przypisuje każdemu punktowi wartość (skalarną lub wektorową). Fizyka: Własność przestrzeni
Wykład z analizy. Tydzień 10 i 11. Różniczkowanie funkcji wielu zmiennych
 Wykład z analizy Tydzień 1 i 11. Różniczkowanie funkcji wielu zmiennych 1.1 Niech f(x, y) będzie funkcją dwóch zmiennych, i niech druga współrzędna będzie ustalona y = y. Rozważana funkcja zależy tylko
Wykład z analizy Tydzień 1 i 11. Różniczkowanie funkcji wielu zmiennych 1.1 Niech f(x, y) będzie funkcją dwóch zmiennych, i niech druga współrzędna będzie ustalona y = y. Rozważana funkcja zależy tylko
Zagadnienia brzegowe dla równań eliptycznych
 Temat 7 Zagadnienia brzegowe dla równań eliptycznych Rozważmy płaski obszar R 2 ograniczony krzywą. la równania Laplace a (Poissona) stawia się trzy podstawowe zagadnienia brzegowe. Zagadnienie irichleta
Temat 7 Zagadnienia brzegowe dla równań eliptycznych Rozważmy płaski obszar R 2 ograniczony krzywą. la równania Laplace a (Poissona) stawia się trzy podstawowe zagadnienia brzegowe. Zagadnienie irichleta
13. Funkcje wielu zmiennych pochodne, gradient, Jacobian, ekstrema lokalne.
 13. Funkcje wielu zmiennych pochodne, gradient, Jacobian, ekstrema lokalne. 1. Wprowadzenie. Dotąd rozważaliśmy funkcje działające z podzbioru liczb rzeczywistych w zbiór liczb rzeczywistych, zatem funkcje
13. Funkcje wielu zmiennych pochodne, gradient, Jacobian, ekstrema lokalne. 1. Wprowadzenie. Dotąd rozważaliśmy funkcje działające z podzbioru liczb rzeczywistych w zbiór liczb rzeczywistych, zatem funkcje
Zadania do samodzielnego rozwiązania zestaw 11
 Zadania do samodzielnego rozwiązania zestaw 11 1 Podać definicję pochodnej funkcji w punkcie, a następnie korzystając z tej definicji obliczyć ( ) π (a) f, jeśli f(x) = cos x, (e) f (0), jeśli f(x) = 4
Zadania do samodzielnego rozwiązania zestaw 11 1 Podać definicję pochodnej funkcji w punkcie, a następnie korzystając z tej definicji obliczyć ( ) π (a) f, jeśli f(x) = cos x, (e) f (0), jeśli f(x) = 4
Całki powierzchniowe w R n
 Całki powierzchniowe w R n Na początek małe uzupełnienie z algebry liniowej. Niech R n k oznacza przestrzeń liniową macierzy o n wierszach i k kolumnach. Dla dowolnej macierzy A R n k, gdzie k n, połóżmy
Całki powierzchniowe w R n Na początek małe uzupełnienie z algebry liniowej. Niech R n k oznacza przestrzeń liniową macierzy o n wierszach i k kolumnach. Dla dowolnej macierzy A R n k, gdzie k n, połóżmy
x y = 2z. + 2y f(x, y) = ln(x3y ) y x
 = ln(x3y ) y x") . Funkcje wielu zmiennych i funkcje uwikłane Zad.. Obliczyć przybliżoną wartość wyrażenia (, 4) (,). Zad.. Wykazać, że każda funkcja z(x, y) = x f ( ) y x, gdzie f jest funkcją różniczkowalną jednej zmiennej,
. Funkcje wielu zmiennych i funkcje uwikłane Zad.. Obliczyć przybliżoną wartość wyrażenia (, 4) (,). Zad.. Wykazać, że każda funkcja z(x, y) = x f ( ) y x, gdzie f jest funkcją różniczkowalną jednej zmiennej,
1 Relacje i odwzorowania
 Relacje i odwzorowania Relacje Jacek Kłopotowski Zadania z analizy matematycznej I Wykazać, że jeśli relacja ρ X X jest przeciwzwrotna i przechodnia, to jest przeciwsymetryczna Zbadać czy relacja ρ X X
Relacje i odwzorowania Relacje Jacek Kłopotowski Zadania z analizy matematycznej I Wykazać, że jeśli relacja ρ X X jest przeciwzwrotna i przechodnia, to jest przeciwsymetryczna Zbadać czy relacja ρ X X
W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora.
 1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
Liczby zespolone. Zadanie 1. Oblicz: a) ( 3+i)( 1 3i) b) (3+i)2 (4i+1) i
 ( 3+i)( 1 3i) b) (3+i)2 (4i+1) i") Zadanie. Oblicz: a) ( 3+i)( 3i) +i b) (3+i)2 (4i+) i (2+i) 3 Liczby zespolone Zadanie 2. Zaznacz na płaszczyźnie Gaussa zbiór: a) {z : z > 3} b) {z : z i } c) {z : 4 z + + i < 9} Zadanie 3. Wykaż, że suma
Zadanie. Oblicz: a) ( 3+i)( 3i) +i b) (3+i)2 (4i+) i (2+i) 3 Liczby zespolone Zadanie 2. Zaznacz na płaszczyźnie Gaussa zbiór: a) {z : z > 3} b) {z : z i } c) {z : 4 z + + i < 9} Zadanie 3. Wykaż, że suma
Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem. 2. CAŁKA PODWÓJNA Całka podwójna po prostokącie
 Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem..1. Całka podwójna po prostokącie.. CAŁKA POWÓJNA.. Całka podwójna po obszarach normalnych..3. Całka podwójna po obszarach regularnych..4.
Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem..1. Całka podwójna po prostokącie.. CAŁKA POWÓJNA.. Całka podwójna po obszarach normalnych..3. Całka podwójna po obszarach regularnych..4.
Mechanika. Wykład 2. Paweł Staszel
 Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
2. Definicja pochodnej w R n
 2. Definicja pochodnej w R n Niech będzie dana funkcja f : U R określona na zbiorze otwartym U R n. Pochodną kierunkową w punkcie a U w kierunku wektora u R n nazywamy granicę u f(a) = lim t 0 f(a + tu)
2. Definicja pochodnej w R n Niech będzie dana funkcja f : U R określona na zbiorze otwartym U R n. Pochodną kierunkową w punkcie a U w kierunku wektora u R n nazywamy granicę u f(a) = lim t 0 f(a + tu)
Jacek Cichoń Katedra Informatyki Wydział Podstawowych Problemów Techniki Politechniki Wrocławskiej
 Jacek Cichoń Katedra Informatyki Wydział Podstawowych Problemów Techniki Politechniki Wrocławskiej MAP1156: Analiza Matematyczna II Wykład przeznaczony jest dla studentów I roku I stopnia Inżynierii Biomedycznej
Jacek Cichoń Katedra Informatyki Wydział Podstawowych Problemów Techniki Politechniki Wrocławskiej MAP1156: Analiza Matematyczna II Wykład przeznaczony jest dla studentów I roku I stopnia Inżynierii Biomedycznej
Wstęp. W razie zauważenia jakichś błędów w tym tekście proszę o sygnał, na przykład mailowy: michal.musielak@utp.edu.pl.
 Wstęp Niniejsze opracowanie zawiera notatki z ćwiczeń z matematyki prowadzonych na UTP kierunkach: Budownictwo, Mechanika i Budowa Maszyn, Inżynieria Odnawialnych Źródeł Energii, Transport, Teleinformatyka,
Wstęp Niniejsze opracowanie zawiera notatki z ćwiczeń z matematyki prowadzonych na UTP kierunkach: Budownictwo, Mechanika i Budowa Maszyn, Inżynieria Odnawialnych Źródeł Energii, Transport, Teleinformatyka,
Elementy równań różniczkowych cząstkowych
 Elementy równań różniczkowych cząstkowych Magdalena Jakubek kwiecień 2016 1 Równania różniczkowe cząstkowe Problem brzegowy i problem początkowy Klasyfikacja równań Rodzaje warunków brzegowych Najważniejsze
Elementy równań różniczkowych cząstkowych Magdalena Jakubek kwiecień 2016 1 Równania różniczkowe cząstkowe Problem brzegowy i problem początkowy Klasyfikacja równań Rodzaje warunków brzegowych Najważniejsze
SIMR 2016/2017, Analiza 2, wykład 1, Przestrzeń wektorowa
 SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
Zadania z analizy matematycznej - sem. I Pochodne funkcji, przebieg zmienności funkcji
 Zadania z analizy matematycznej - sem. I Pochodne funkcji przebieg zmienności funkcji Definicja 1. Niech f : (a b) R gdzie a < b oraz 0 (a b). Dla dowolnego (a b) wyrażenie f() f( 0 ) = f( 0 + ) f( 0 )
Zadania z analizy matematycznej - sem. I Pochodne funkcji przebieg zmienności funkcji Definicja 1. Niech f : (a b) R gdzie a < b oraz 0 (a b). Dla dowolnego (a b) wyrażenie f() f( 0 ) = f( 0 + ) f( 0 )
x y = 2z, + 2y f(x, y) = ln(x3y ) y x
 = ln(x3y ) y x") . Funkcje wielu zmiennych i funkcje uwikłane Zad.. Obliczyć przybliżoną wartość wyrażenia (, 4) (,), Zad.. Obliczyć przybliżoną wartość wyrażenia, 8, 5, Zad. 3. Wykazać, że każda funkcja z(x, y) = x f
. Funkcje wielu zmiennych i funkcje uwikłane Zad.. Obliczyć przybliżoną wartość wyrażenia (, 4) (,), Zad.. Obliczyć przybliżoną wartość wyrażenia, 8, 5, Zad. 3. Wykazać, że każda funkcja z(x, y) = x f
Rozdział 2. Krzywe stożkowe. 2.1 Elipsa. Krzywe stożkowe są zadane ogólnym równaniem kwadratowym na płaszczyźnie
 Rozdział Krzywe stożkowe Krzywe stożkowe są zadane ogólnym równaniem kwadratowym na płaszczyźnie x + By + Cxy + Dx + Ey + F = 0. (.) W zależności od relacji pomiędzy współczynnikami otrzymujemy elipsę,
Rozdział Krzywe stożkowe Krzywe stożkowe są zadane ogólnym równaniem kwadratowym na płaszczyźnie x + By + Cxy + Dx + Ey + F = 0. (.) W zależności od relacji pomiędzy współczynnikami otrzymujemy elipsę,
Spis treści 1. Macierze, wyznaczniki, równania liniowe 2 2. Geometria analityczna 7 3. Przestrzenie liniowe Granice, pochodne funkcji i ich
 Spis treści Macierze wyznaczniki równania liniowe Geometria analityczna 7 Przestrzenie liniowe 0 4 Granice pochodne funkcji i ich zastosowania 5 Liczby zespolone 8 6 Wielomiany 7 Całki nieoznaczone 8 Zastosowania
Spis treści Macierze wyznaczniki równania liniowe Geometria analityczna 7 Przestrzenie liniowe 0 4 Granice pochodne funkcji i ich zastosowania 5 Liczby zespolone 8 6 Wielomiany 7 Całki nieoznaczone 8 Zastosowania
Spis wszystkich symboli
 1 Spis wszystkich symboli Symbole podstawowe - pojedyncze znaki, alfabet grecki α β γ Γ δ ξ η ε ϕ ν ρ τ θ Θ ψ Ψ φ Φ Ω Υ Σ -alfa -beta - gamma - gamma (duże) - delta (małe) - delta (duże) -ksi -eta - epsilon
1 Spis wszystkich symboli Symbole podstawowe - pojedyncze znaki, alfabet grecki α β γ Γ δ ξ η ε ϕ ν ρ τ θ Θ ψ Ψ φ Φ Ω Υ Σ -alfa -beta - gamma - gamma (duże) - delta (małe) - delta (duże) -ksi -eta - epsilon
Definicja punktu wewnętrznego zbioru Punkt p jest punktem wewnętrznym zbioru, gdy należy do niego wraz z pewnym swoim otoczeniem
 Definicja kuli w R n ulą o promieniu r>0 r R i o środku w punkcie p R n nazywamy zbiór {x R n : ρ(xp)
Definicja kuli w R n ulą o promieniu r>0 r R i o środku w punkcie p R n nazywamy zbiór {x R n : ρ(xp)
Rachunek różniczkowy funkcji dwóch zmiennych
 Rachunek różniczkowy funkcji dwóch zmiennych Definicja Spis treści: Wykres Ciągłość, granica iterowana i podwójna Pochodne cząstkowe Różniczka zupełna Gradient Pochodna kierunkowa Twierdzenie Schwarza
Rachunek różniczkowy funkcji dwóch zmiennych Definicja Spis treści: Wykres Ciągłość, granica iterowana i podwójna Pochodne cząstkowe Różniczka zupełna Gradient Pochodna kierunkowa Twierdzenie Schwarza
ZAKRESY NATERIAŁU Z-1:
 Załącznik nr 2 do SIWZ Nr postępowania: ZP/47/055/U/13 ZAKRESY NATERIAŁU Z-1: 1) Funkcja rzeczywista jednej zmiennej: ciąg dalszy a) Definicja granicy funkcji, b) Twierdzenie o trzech funkcjach, o granicy
Załącznik nr 2 do SIWZ Nr postępowania: ZP/47/055/U/13 ZAKRESY NATERIAŁU Z-1: 1) Funkcja rzeczywista jednej zmiennej: ciąg dalszy a) Definicja granicy funkcji, b) Twierdzenie o trzech funkcjach, o granicy
2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I
![2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I](/thumbs/88/115575416.jpg "2 1 3 c c1. e 1, e 2,..., e n A= e 1 e 2...e n [ ] M. Przybycień Matematyczne Metody Fizyki I") Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Liniowa niezależno ność wektorów Przykład: Sprawdzić czy następujące wektory z przestrzeni 3 tworzą bazę: e e e3 3 Sprawdzamy czy te wektory są liniowo niezależne: 3 c + c + c3 0 c 0 c iei 0 c + c + 3c3
Elektrodynamika Część 1 Elektrostatyka Ryszard Tanaś Zakład Optyki Nieliniowej, UAM
 Elektrodynamika Część 1 Elektrostatyka Ryszard Tanaś Zakład Optyki Nieliniowej, UAM http://zon8.physd.amu.edu.pl/\~tanas Spis treści 1 Literatura 3 2 Elektrostatyka 4 2.1 Pole elektryczne......................
Elektrodynamika Część 1 Elektrostatyka Ryszard Tanaś Zakład Optyki Nieliniowej, UAM http://zon8.physd.amu.edu.pl/\~tanas Spis treści 1 Literatura 3 2 Elektrostatyka 4 2.1 Pole elektryczne......................
ELEKTROTECHNIKA Semestr 2 Rok akad. 2015 / 2016. ZADANIA Z MATEMATYKI Zestaw 1. 2. Oblicz pochodne cząstkowe rzędu drugiego funkcji:
 ZADANIA Z MATEMATYKI Zestaw 1 1. Oblicz pochodne cząstkowe funkcji: a) f(x, y) = x sin y x b) f(x, y) = e y 1+x 2 c) f(x, y, z) = z cos x+y z 2. Oblicz pochodne cząstkowe rzędu drugiego funkcji: 3. Wyznacz
ZADANIA Z MATEMATYKI Zestaw 1 1. Oblicz pochodne cząstkowe funkcji: a) f(x, y) = x sin y x b) f(x, y) = e y 1+x 2 c) f(x, y, z) = z cos x+y z 2. Oblicz pochodne cząstkowe rzędu drugiego funkcji: 3. Wyznacz
Rozdział 5. Twierdzenia całkowe. 5.1 Twierdzenie o potencjale. Będziemy rozpatrywać całki krzywoliniowe liczone wzdłuż krzywej C w przestrzeni
 Rozdział 5 Twierdzenia całkowe 5.1 Twierdzenie o potencjale Będziemy rozpatrywać całki krzywoliniowe liczone wzdłuż krzywej w przestrzeni trójwymiarowej, I) = A d r, 5.1) gdzie A = A r) jest funkcją polem)
Rozdział 5 Twierdzenia całkowe 5.1 Twierdzenie o potencjale Będziemy rozpatrywać całki krzywoliniowe liczone wzdłuż krzywej w przestrzeni trójwymiarowej, I) = A d r, 5.1) gdzie A = A r) jest funkcją polem)
Elektrodynamika Część 1 Elektrostatyka Ryszard Tanaś Zakład Optyki Nieliniowej, UAM
 Elektrodynamika Część 1 Elektrostatyka Ryszard Tanaś Zakład Optyki Nieliniowej, UAM http://zon8.physd.amu.edu.pl/~tanas Spis treści 1 Literatura 3 2 Elektrostatyka 4 2.1 Pole elektryczne....................
Elektrodynamika Część 1 Elektrostatyka Ryszard Tanaś Zakład Optyki Nieliniowej, UAM http://zon8.physd.amu.edu.pl/~tanas Spis treści 1 Literatura 3 2 Elektrostatyka 4 2.1 Pole elektryczne....................
1 Pochodne wyższych rzędów
 1 Pochodne wyższych rzędów Definicja 1.1 (Pochodne cząstkowe drugiego rzędu) Niech f będzie odwzorowaniem o wartościach w R m, określonym na zbiorze G R k. Załóżmy, że zbiór tych x G, dla których istnieje
1 Pochodne wyższych rzędów Definicja 1.1 (Pochodne cząstkowe drugiego rzędu) Niech f będzie odwzorowaniem o wartościach w R m, określonym na zbiorze G R k. Załóżmy, że zbiór tych x G, dla których istnieje
Układy współrzędnych
 Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Całki krzywoliniowe wiadomości wstępne
 Całki krzywoliniowe wiadomości wstępne Łuk na płaszczyźnie to zbiór punktów (x, y o współrzędnych x = x(t, y = y(t, gdzie (x(t, y(t są funkcjami ciągłymi określonymi na przedziale bez punktów wielokrotnych.
Całki krzywoliniowe wiadomości wstępne Łuk na płaszczyźnie to zbiór punktów (x, y o współrzędnych x = x(t, y = y(t, gdzie (x(t, y(t są funkcjami ciągłymi określonymi na przedziale bez punktów wielokrotnych.
Agata Boratyńska ZADANIA Z MATEMATYKI, I ROK SGH GRANICA CIĄGU
 Agata Boratyńska Zadania z matematyki Agata Boratyńska ZADANIA Z MATEMATYKI, I ROK SGH GRANICA CIĄGU. Korzystając z definicji granicy ciągu udowodnić: a) n + n+ = 0 b) n + n n+ = c) n + n a =, gdzie a
Agata Boratyńska Zadania z matematyki Agata Boratyńska ZADANIA Z MATEMATYKI, I ROK SGH GRANICA CIĄGU. Korzystając z definicji granicy ciągu udowodnić: a) n + n+ = 0 b) n + n n+ = c) n + n a =, gdzie a
SIMR 2012/2013, Analiza 2, wykład 14,
 IMR 2012/2013, Analiza 2, wykład 14, 2012-06-03 Całka powierzchniowa efinicja gładkiego płata powierzchni Gładkim płatem powierzchni nazywamy zbiór : = {(x, y, z) : z = g(x, y), (x, y) }, gdzie R 2 jest
IMR 2012/2013, Analiza 2, wykład 14, 2012-06-03 Całka powierzchniowa efinicja gładkiego płata powierzchni Gładkim płatem powierzchni nazywamy zbiór : = {(x, y, z) : z = g(x, y), (x, y) }, gdzie R 2 jest
Notatki do wykładu Geometria Różniczkowa I
 Notatki do wykładu Geometria Różniczkowa I Katarzyna Grabowska, KMMF 22 października 2013 1 Przestrzeń styczna i kostyczna c.d. Pora na podsumowanie: Zdefiniowaliśmy przestrzeń styczną do przestrzeni afinicznej
Notatki do wykładu Geometria Różniczkowa I Katarzyna Grabowska, KMMF 22 października 2013 1 Przestrzeń styczna i kostyczna c.d. Pora na podsumowanie: Zdefiniowaliśmy przestrzeń styczną do przestrzeni afinicznej
i = [ 0] j = [ 1] k = [ 0]
![i = [ 0] j = [ 1] k = [ 0]](/thumbs/70/62901734.jpg "i = [ 0] j = [ 1] k = [ 0]") Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
Ćwiczenia nr TEMATYKA: Układy współrzędnych: kartezjański, walcowy (cylindryczny), sferyczny (geograficzny), Przekształcenia: izometryczne, nieizometryczne. DEFINICJE: Wektor wodzący: wektorem r, ρ wodzącym
(c) Wykazać, że (X, ϱ) jest spójna wtedy i tylko wtedy, gdy (X j, ϱ j ) jest spójna, j = 1,..., N.
 Wykazać, że (X, ϱ) jest spójna wtedy i tylko wtedy, gdy (X j, ϱ j ) jest spójna, j = 1,..., N.") 1. Przestrzenie metryczne Zadanie 1.1. Czy może się zdarzyć, że B(a, r) B(a, r)? Zadanie 1.2. Czy może się zdarzyć, że kula nie jest zbiorem spójnym? Zadanie 1.3. Niech (X, d) będzie przestrzenią metryczną
1. Przestrzenie metryczne Zadanie 1.1. Czy może się zdarzyć, że B(a, r) B(a, r)? Zadanie 1.2. Czy może się zdarzyć, że kula nie jest zbiorem spójnym? Zadanie 1.3. Niech (X, d) będzie przestrzenią metryczną
Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem. 3. CAŁKA POTRÓJNA
 Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem 1 Całka potrójna po prostopadłościanie CAŁKA POTRÓJNA 2 Całka potrójna po obszarach normalnych Współrzędne walcowe 4 Współrzędne sferyczne
Wykłady z Matematyki stosowanej w inżynierii środowiska, II sem 1 Całka potrójna po prostopadłościanie CAŁKA POTRÓJNA 2 Całka potrójna po obszarach normalnych Współrzędne walcowe 4 Współrzędne sferyczne
opracował Maciej Grzesiak Analiza wektorowa
 opracował Maciej Grzesiak Analiza wektorowa 1. Funkcje wektorowe 1.1. Funkcje wektorowe na płaszczyźnie Wektor r = x i + y j nazywamy wektorem wodzącym punktu (x, y). Jeśli x oraz y są funkcjami czasu,
opracował Maciej Grzesiak Analiza wektorowa 1. Funkcje wektorowe 1.1. Funkcje wektorowe na płaszczyźnie Wektor r = x i + y j nazywamy wektorem wodzącym punktu (x, y). Jeśli x oraz y są funkcjami czasu,
10 zadań związanych z granicą i pochodną funkcji.
 0 zadań związanych z granicą i pochodną funkcji Znajdź przedziały monotoniczności funkcji f() 4, określonej dla (0,) W przedziale ( 0,) wyrażenie 4 przyjmuje wartości ujemne, dlatego dla (0,) funkcja f()
0 zadań związanych z granicą i pochodną funkcji Znajdź przedziały monotoniczności funkcji f() 4, określonej dla (0,) W przedziale ( 0,) wyrażenie 4 przyjmuje wartości ujemne, dlatego dla (0,) funkcja f()
Analiza Matematyczna MAEW101
 Analiza Matematyczna MAEW Wydział Elektroniki Listy zadań nr 8-4 (część II) na podstawie skryptów: M.Gewert, Z Skoczylas, Analiza Matematyczna. Przykłady i zadania, GiS, Wrocław 5 M.Gewert, Z Skoczylas,
Analiza Matematyczna MAEW Wydział Elektroniki Listy zadań nr 8-4 (część II) na podstawie skryptów: M.Gewert, Z Skoczylas, Analiza Matematyczna. Przykłady i zadania, GiS, Wrocław 5 M.Gewert, Z Skoczylas,
Geometria analityczna - przykłady
 Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
Geometria analityczna - przykłady 1. Znaleźć równanie ogólne i równania parametryczne prostej w R 2, któr przechodzi przez punkt ( 4, ) oraz (a) jest równoległa do prostej x + 5y 2 = 0. (b) jest prostopadła
Geometria Analityczna w Przestrzeni
 Algebra p. 1/25 Algebra Geometria Analityczna w Przestrzeni Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045
Algebra p. 1/25 Algebra Geometria Analityczna w Przestrzeni Aleksander Denisiuk denisjuk@pjwstk.edu.pl Polsko-Japońska Wyższa Szkoła Technik Komputerowych Wydział Informatyki w Gdańsku ul. Brzegi 55 80-045
Matematyka dla studentów ekonomii : wykłady z ćwiczeniami/ Ryszard Antoniewicz, Andrzej Misztal. Wyd. 4 popr., 6 dodr. Warszawa, 2012.
 Matematyka dla studentów ekonomii : wykłady z ćwiczeniami/ Ryszard Antoniewicz, Andrzej Misztal. Wyd. 4 popr., 6 dodr. Warszawa, 2012 Spis treści Przedmowa 9 CZĘŚĆ I. WSTĘP DO MATEMATYKI 11 Wykład 1. Rachunek
Matematyka dla studentów ekonomii : wykłady z ćwiczeniami/ Ryszard Antoniewicz, Andrzej Misztal. Wyd. 4 popr., 6 dodr. Warszawa, 2012 Spis treści Przedmowa 9 CZĘŚĆ I. WSTĘP DO MATEMATYKI 11 Wykład 1. Rachunek
Pochodna funkcji. Pochodna funkcji w punkcie. Różniczka funkcji i obliczenia przybliżone. Zastosowania pochodnych. Badanie funkcji.
 Pochodna funkcji Pochodna funkcji w punkcie. Różniczka funkcji i obliczenia przybliżone. Zastosowania pochodnych. Badanie funkcji. Małgorzata Wyrwas Katedra Matematyki Wydział Informatyki Politechnika
Pochodna funkcji Pochodna funkcji w punkcie. Różniczka funkcji i obliczenia przybliżone. Zastosowania pochodnych. Badanie funkcji. Małgorzata Wyrwas Katedra Matematyki Wydział Informatyki Politechnika
Zadania z analizy matematycznej - sem. II Ekstrema funkcji wielu zmiennych, twierdzenia o funkcji odwrotnej i funkcji uwikªanej
 Zadania z analizy matematycznej - sem. II Ekstrema funkcji wielu zmiennych, twierdzenia o funkcji odwrotnej i funkcji uwikªanej Denicja 1. Niech X = R n b dzie przestrzeni unormowan oraz d(x, y) = x y.
Zadania z analizy matematycznej - sem. II Ekstrema funkcji wielu zmiennych, twierdzenia o funkcji odwrotnej i funkcji uwikªanej Denicja 1. Niech X = R n b dzie przestrzeni unormowan oraz d(x, y) = x y.
Krzywe stożkowe Lekcja VII: Hiperbola
 Krzywe stożkowe Lekcja VII: Hiperbola Wydział Matematyki Politechniki Wrocławskiej Czym jest hiperbola? Hiperbola jest krzywą stożkową powstałą przez przecięcie stożka płaszczyzną pod kątem 0 β < α (gdzie
Krzywe stożkowe Lekcja VII: Hiperbola Wydział Matematyki Politechniki Wrocławskiej Czym jest hiperbola? Hiperbola jest krzywą stożkową powstałą przez przecięcie stożka płaszczyzną pod kątem 0 β < α (gdzie