RISK-AWARE PROJECT SCHEDULING
|
|
|
- Alicja Kowalewska
- 7 lat temu
- Przeglądów:
Transkrypt
1 RISK-AWARE PROJECT SCHEDULING Z WYKORZYSTANIEM UCT KAROL WALĘDZIK
2 DEFINICJA ZAGADNIENIA
 Karol Walędzik -")
3 RESOURCE-CONSTRAINED PROJECT SCHEDULING (RCPS) Karol Walędzik - RAPS 3
4 RISK-AWARE PROJECT SCHEDULING (RAPS) 1 tryb wykonywania działań Czas trwania zadań jako zmienna probabilistyczna o znanym rozkładzie Funkcja celu: minimalizacja czasu trwania projektu Budżet: zamodelowany przez zasób nieodnawialny Karol Walędzik - RAPS 4
5 RISK-AWARE PROJECT SCHEDULING (RAPS) Ryzyko: rozkład prawdopodobieństwa wystąpienia (w jednostce czasu) definicja efektów wystąpienia ryzyka: czasowa zmiana dostępnej ilości zasobu odnawialnego drastyczna zmiana czasu trwania zadania ryzyko może zrealizować się tylko raz per projekt (ale może być wiele identycznych ryzyk) efekt nie wpływa na zadania w trakcie realizacji w momencie realizacji ryzyka warunki wystąpienia zadania: moment rozpoczęcia danego zadania (w przyszłości potencjalnie kolejne warunki: minimalny / maksymalny dotychczasowy czas trwania projektu, wykonanie / niewykonanie dotychczas danego zadania,..) Karol Walędzik - RAPS 5
6 RISK-AWARE PROJECT SCHEDULING (RAPS) Działanie: specjalny rodzaj zadania: nie jest niezbędne dla realizacji projektu może (ale nie musi) mieć zerowy czas trwania wymaga zasobów, może mieć poprzedniki (zadania i/lub działania) lista efektów: czasowa zmiana ilości zasobu (odnawialnego lub nie) zmiana czasu trwania zadania (w przyszłości potencjalnie: zmiana rozkładu prawdopodobieństwa wystąpienia ryzyka (liniowe przeskalowanie), zmiana wartości nasilenia już występującego ryzyka) efekty nie wpływają na zadania właśnie wykonywane (w przyszłości opcjonalnie: opóźnienie wystąpienia efektów) warunki wykonalności: nierozpoczęcie wykonywania danego zadania (w przyszłości potencjalnie kolejne warunki: minimalne nasilenie występowania danego ryzyka, minimalny/maksymalny czas od początku projektu, wykonanie poprzedników) Karol Walędzik - RAPS 6
7 RISK-AWARE PROJECT SCHEDULING (RAPS) Efekt: rozkład prawdopodobieństwa intensywności rozkład prawdopodobieństwa czasu trwania typ efektu i specyficzne parametry Karol Walędzik - RAPS 7
8 INSTANCJE PROBLEMU
9 BAZA INSTANCJI RCPS PSPLib
10 KONWERSJA DO INSTANCJI RAPS Czas trwania zadań rozkład Beta(3,5) Moda == szacunek punktowy instancji RCPS P (t <= 75% mody) 3-5% P (t >= 150% mody) 3-5%
11 KONWERSJA DO INSTANCJI RAPS Ryzyka czasowa niedostępność zasobu jedno ryzyko per każdy zasób odnawialny prawdopodobieństwo wystąpienia == 2% w każdej jednostce czasu natężenie == -1 / -2 z równym prawdopodobieństwem czas trwania == rozkład jednostajny z przedziału [10;30]
12 KONWERSJA DO INSTANCJI RAPS Ryzyka drastyczna zmiana czasu trwania zadania jedno ryzyko dla każdego wybranych zadań (34% wszystkich zadań) prawdopodobieństwo wystąpienia == 15% w momencie rozpoczynania zadania natężenie (mnożnik czasu trwania zadania) == 2 czas trwania: nie dotyczy (nieograniczony) realizowalność: tylko w momencie rozpoczynania zadania
13 KONWERSJA DO INSTANCJI RAPS Działania naprawcze czasowa wynajęcie dodatkowego zasobu jedno działanie per każdy rodzaj zasobu odnawialnego dedykowany budżet w wysokości 34% liczby typów zasobów projekcie koszt == 1 jednostka budżetu czas trwania == 8 efekt: czasowa zmiana dostępnej ilości zasobu odnawialnego natężenie == 1 czas trwania == 40
14 KONWERSJA DO INSTANCJI RAPS Działania naprawcze zwiększenie kapitału zaangażowanego w zadanie jedno działanie per każde zadanie zagrożone ryzykiem drastycznego wydłużenia czasu dedykowany budżet w wysokości 15% sumarycznego oczekiwanego czasu realizacji ryzykownych zadań w projekcie koszt == 1 per jednostka oczekiwanego skrócenia czasu zadania czas trwania == 0 wykonalność: do momentu rozpoczęcia wykonywania zadania (wyłącznie) efekt: zmiana czasu trwania zadania natężenie (mnożnik czasu realizacji zadania) == 0.66 czas trwania: nie dotyczy (nieograniczony)
15 HEURISTIC SOLVER HEURYSTYCZNE ROZWIĄZYWANIE RAPS Karol Walędzik - RAPS 15
16 HEURYSTYCZNE ROZWIĄZYWANIE RCPSP Parallel Schedule Generation Scheme dla każdego kolejnego punktu czasowego: określ zbiór D zadań, które mogą legalnie zostać rozpoczęte w tym momencie (uwzględniając zarówno wymagane poprzedniki, jak i zasoby) powtarzaj dopóki zbiór D nie jest pusty: wybierz spośród nich zadanie o najwyższym priorytecie (korzystając z heurystyki priorytetyzującej) zaplanuj rozpoczęcie wybranego zadania w analizowanym punkcie czasowym uaktualnij ilość dostępnych zasobów, przelicz zawartość zbioru D Karol Walędzik - RAPS 16
17 ANALIZA ŚCIEŻKI KRYTYCZNEJ Analiza na bazie zależności zadań, bez uwzględnienia zasobów: w przód: wyznaczenie dla każdego zadania ES (early start) i EF (early finish) wstecz (na bazie poprzedniej): wyznaczenie dla każdego zadania LS (late start) i LF (late finish) Zapas czasu dla zadania (slack): S = LF - EF = ES LS Ścieżka krytyczna: zadania, dla których S = 0 Karol Walędzik - RAPS 17
18 HEURYSTYCZNE REGUŁY PRIORYTETYZUJĄCE Proste reguły: najdłuższe zadanie min. LF min. LS min. S suma czasu realizacji zadania i bezpośrednich następników liczba bezpośrednich i pośrednich następników zadania Karol Walędzik - RAPS 18
19 RAPS HEURISTIC SOLVER (HS) w kolejnych punktach czasowych: sprawdź, czy jest to punkt decyzyjny jeśli tak: wygeneruj nowy plan realizacji projektu wybierz zadania do realizacji na podstawie planu przejdź do kolejnego punktu czasowego Karol Walędzik - RAPS 19
20 RAPS HEURISTIC SOLVER (HS) W każdym punkcie decyzyjnym: skonstruuj plan realizacji projektu: wygeneruj do 32 potencjalnych planów: plan składa się z działań do wykonania natychmiast i harmonogramu zadań w ramach generowania każdego z planów: wybierz losowo realizowalny podzbiór legalnych działań (uwzględniając wpływ działań na wykonalność kolejnych) oraz heurystykę priorytetyzującą (unikając powtórzeń wybranych kombinacji) stwórz deterministyczny model projektu (RCP) na bazie wartości oczekiwanych rozkładów czasu trwania zadań i aktualnego stanu zasobów (uwzględnij aktualne efekty ryzyk i działań) wygeneruj plan za pomocą PSGS z wybraną heurystyką wybierz najkrótszy plan jako aktualny Karol Walędzik - RAPS 20
21 RAPS HEURISTIC SOLVER (HS) Realizacja planu: 1. jeśli to możliwe, rozpocznij pierwsze zadanie w planie 2. znajdź w planie pierwsze realizowalne zadanie o zaplanowanym czasie startu nie późniejszym niż 2 jednostki od aktualnego punktu czasowego 3. jeśli brak takiego zadania, zakończ obsługę aktualnego punktu czasowego 4. rozpocznij wykonywanie zadania 5. wróć do punktu 2 Karol Walędzik - RAPS 21
22 RAPS HEURISTIC SOLVER (HS) Warunki uznania punktu czasowego za punkt decyzyjny: brak aktualnego planu pierwsze zadanie w planie opóźnione o więcej niż 2 jednostki pojawienie się nowego efektu ryzyka w poprzedniej jednostce czasowej zakończenie się efektu w poprzedniej jednostce czasowej opóźnienie startu pierwszego zadania w planie o więcej niż 2 jednostki czasu pojawienie się nowego, nigdy wcześniej nie rozważanego, legalnego działania naprawczego Karol Walędzik - RAPS 22
23 UCT
24 UCT
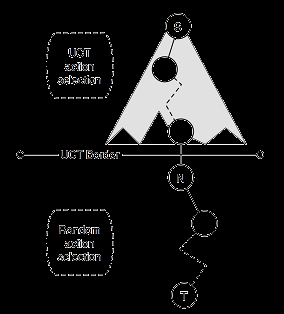
25 UCT Sposób wybierania kolejnego ruchu podczas symulacji (UCT): Q(s,a) średni dotychczasowy wynik pary stan-ruch N liczba wizyt w danym stanie/wykonań danej akcji akcje nigdy nie wykonane wybierane są w pierwszej kolejności
26 BASICUCT
27 UCT JAKO PLANER Gra jednoosobowa z niedeterminizmem Możliwe akcje: rozpoczęcie wykonania działania rozpoczęcie wykonania zadania noop Tylko noop powoduje przejście do kolejnej jednostki czasowej w przyszłości: możliwe zastosowanie heurystyk w celu ograniczenia liczby rozpatrywanych akcji np.: zawsze rozpoczynaj zadania, jeśli tylko są wolne zasoby
 return project.")
.greatest(d => d.priority); ExecuteDecision(project, decision, true); int result = (node.")
28 FAZA UCT private int Uct(OngoingProject project) { if (project.todo.count == 0) return project.time; var node = GetOrCreateUctNode(project); var decision = GetPossibleDecisions(project, node).greatest(d => d.priority); ExecuteDecision(project, decision, true); int result = (node.visits == 0)? MonteCarlo(project) : Uct(project); decision.addscore(result); } return result;
29 FAZA MONTE-CARLO private int MonteCarlo(OngoingProject project) { if (project.todo.count == 0) return project.time; var actions = project.getlegalactions(); var activities = project.getlegalactivities(); } //If there are any legal activities consider starting them if (activities.count > 0 && _random.nextdouble() <=.9) { project.startactivity(activities.random()); } //Consider starting action else if (actions.count > 0 && _random.nextdouble() <.5) { project.startaction(actions.random()); } //Noop; move ahead in time else { project.go(); } return MonteCarlo(project);
30 REPREZENTACJA STANU W DRZEWIE UCT Uproszczona w celu umożliwienia jakiejkolwiek nauki Składowe: Zbiór identyfikatorów zrealizowanych ryzyk Zbiór identyfikatorów zrealizowanych akcji Zbiór uproszczonych opisów działań w trakcie realizacji Działanie: (identyfikator, pozostały czas trwania) Zbiór uproszczonych opisów zadań w trakcie realizacji Zadanie: (identyfikator, pozostały czas trwania) Zbiór identyfikatorów zrealizowanych zadań Zbiór uproszczonych opisów aktualnie aktywnych efektów Efekt: (identyfikator, przybliżona siła, pozostały czas trwania, probabilistyczne parametry specyficzne dla typu efektu) Ilości dostępnych zasobów odnawialnych i nieodnawialnych
31 PROUCT PROACTIVE SCHEDULING WITH UCT
32 PROUCT Planowanie: na początku działania algorytmu po wystąpieniu wyzwalacza planowania Dostępny jest solver rozwiązujący problem RCPS bez ryzyk w wersji z deterministycznym trwaniem zadań potencjalnie w przyszłości: w wersji uwzględniającej niedeterministyczny czas trwania zadań aktualna realizacja: HS z wyłączeniem obsługi działań naprawczych
33 PROUCT Algorytm planowania: UCT w zastosowaniu do niedeterministycznej gry jednoosobowej możliwe ruchy: wykonanie działania noop Noop powoduje uruchomienie solvera dla problemu uwzględniającego efekty działań i realizację projektu do momentu wystąpienia wyzwalacza planowania Reprezentacja stanu jak w BasicUCT
34 PROUCT Algorytm planowania: efekt działania UCT: lista działań do podjęcia w danej chwili uaktualnione przy okazji symulacji statystyki czasów zadań potencjalnie w przyszłości także kosztów faktyczny harmonogram tworzony przez solver na bazie danych z UCT projekt realizowany do czasu kolejnej rundy planowania Wyzwalacze etapu planowania: jak w HS upłynięcie 12 jednostek od ostatniego etapu planowania
35 SOLVER W przyszłości potencjalnie: solver na bazie CI (zwykle skuteczniejszy) niedeterministyczne czasy trwania zadań (rozkłady z UCT)
36 WYNIKI Karol Walędzik - RAPS 37


37 Average Relative Durations Win Rates Karol Walędzik - RAPS 38
RISK-AWARE PROJECT SCHEDULING
 RISK-AWARE PROJECT SCHEDULING SIMPLEUCT CZ. 2 KAROL WALĘDZIK DEFINICJA ZAGADNIENIA RESOURCE-CONSTRAINED PROJECT SCHEDULING (RCPS) Karol Walędzik - RAPS 3 RISK-AWARE PROJECT SCHEDULING (RAPS) 1 tryb wykonywania
RISK-AWARE PROJECT SCHEDULING SIMPLEUCT CZ. 2 KAROL WALĘDZIK DEFINICJA ZAGADNIENIA RESOURCE-CONSTRAINED PROJECT SCHEDULING (RCPS) Karol Walędzik - RAPS 3 RISK-AWARE PROJECT SCHEDULING (RAPS) 1 tryb wykonywania
Risk-Aware Project Scheduling. SimpleUCT
 Risk-Aware Project Scheduling SimpleUCT DEFINICJA ZAGADNIENIA Resource-Constrained Project Scheduling (RCPS) Risk-Aware Project Scheduling (RAPS) 1 tryb wykonywania działań Czas trwania zadań jako zmienna
Risk-Aware Project Scheduling SimpleUCT DEFINICJA ZAGADNIENIA Resource-Constrained Project Scheduling (RCPS) Risk-Aware Project Scheduling (RAPS) 1 tryb wykonywania działań Czas trwania zadań jako zmienna
RISK-AWARE PROJECT SCHEDULING
 RISK-AWARE PROJECT SCHEDULING PROUCT - GRASP KAROL WALĘDZIK DEFINICJA ZAGADNIENIA RESOURCE-CONSTRAINED PROJECT SCHEDULING (RCPS) Karol Walędzik - RAPS 3 RISK-AWARE PROJECT SCHEDULING (RAPS) 1 tryb wykonywania
RISK-AWARE PROJECT SCHEDULING PROUCT - GRASP KAROL WALĘDZIK DEFINICJA ZAGADNIENIA RESOURCE-CONSTRAINED PROJECT SCHEDULING (RCPS) Karol Walędzik - RAPS 3 RISK-AWARE PROJECT SCHEDULING (RAPS) 1 tryb wykonywania
RISK-AWARE PROJECT SCHEDULING
 RISK-AWARE PROJECT SCHEDULING METODA GRASP KAROL WALĘDZIK DEFINICJA ZAGADNIENIA RESOURCE-CONSTRAINED PROJECT SCHEDULING (RCPS) Karol Walędzik - RAPS 3 RISK-AWARE PROJECT SCHEDULING (RAPS) 1 tryb wykonywania
RISK-AWARE PROJECT SCHEDULING METODA GRASP KAROL WALĘDZIK DEFINICJA ZAGADNIENIA RESOURCE-CONSTRAINED PROJECT SCHEDULING (RCPS) Karol Walędzik - RAPS 3 RISK-AWARE PROJECT SCHEDULING (RAPS) 1 tryb wykonywania
POŁĄCZENIE ALGORYTMÓW SYMULACYJNYCH ORAZ DZIEDZINOWYCH METOD HEURYSTYCZNYCH W ZAGADNIENIACH DYNAMICZNEGO PODEJMOWANIA DECYZJI
 POŁĄCZENIE ALGORYTMÓW SYMULACYJNYCH ORAZ DZIEDZINOWYCH METOD HEURYSTYCZNYCH W ZAGADNIENIACH DYNAMICZNEGO PODEJMOWANIA DECYZJI mgr inż. Karol Walędzik k.waledzik@mini.pw.edu.pl prof. dr hab. inż. Jacek
POŁĄCZENIE ALGORYTMÓW SYMULACYJNYCH ORAZ DZIEDZINOWYCH METOD HEURYSTYCZNYCH W ZAGADNIENIACH DYNAMICZNEGO PODEJMOWANIA DECYZJI mgr inż. Karol Walędzik k.waledzik@mini.pw.edu.pl prof. dr hab. inż. Jacek
Ograniczenia projektu. Zakres (co?) Czas (na kiedy?) Budżet (za ile?)
 Czas (na kiedy?) Budżet (za ile?)") Harmonogram Ograniczenia projektu Zakres (co?) Czas (na kiedy?) Budżet (za ile?) Pojęcia podstawowe Harmonogram: Daty wykonania działań Daty osiągnięcia kamieni milowych Działanie: Element składowy pakietu
Harmonogram Ograniczenia projektu Zakres (co?) Czas (na kiedy?) Budżet (za ile?) Pojęcia podstawowe Harmonogram: Daty wykonania działań Daty osiągnięcia kamieni milowych Działanie: Element składowy pakietu
MAGICIAN. czyli General Game Playing w praktyce. General Game Playing
 MAGICIAN czyli General Game Playing w praktyce General Game Playing 1 General Game Playing? Cel: stworzenie systemu umiejącego grać/nauczyć się grać we wszystkie gry Turniej w ramach AAAI National Conference
MAGICIAN czyli General Game Playing w praktyce General Game Playing 1 General Game Playing? Cel: stworzenie systemu umiejącego grać/nauczyć się grać we wszystkie gry Turniej w ramach AAAI National Conference
Algorytmy konstrukcyjne dla problemu harmonogramowania projektu z ograniczonymi zasobami. Marcin Klimek *
 Zeszyty Naukowe WWSI, No 15, Vol. 10, 2016, s. 41-52 Algorytmy konstrukcyjne dla problemu harmonogramowania projektu z ograniczonymi zasobami Marcin Klimek * Państwowa Szkoła Wyższa w Białej Podlaskiej,
Zeszyty Naukowe WWSI, No 15, Vol. 10, 2016, s. 41-52 Algorytmy konstrukcyjne dla problemu harmonogramowania projektu z ograniczonymi zasobami Marcin Klimek * Państwowa Szkoła Wyższa w Białej Podlaskiej,
t i L i T i
 Planowanie oparte na budowaniu modelu struktury przedsięwzięcia za pomocą grafu nazywa sie planowaniem sieciowym. Stosuje się do planowania i kontroli realizacji założonych przedsięwzięć gospodarczych,
Planowanie oparte na budowaniu modelu struktury przedsięwzięcia za pomocą grafu nazywa sie planowaniem sieciowym. Stosuje się do planowania i kontroli realizacji założonych przedsięwzięć gospodarczych,
ŚCIEŻKA KRYTYCZNA. W ścieżkach krytycznych kolejne zadanie nie może się rozpocząć, dopóki poprzednie się nie zakończy.
 ŚCIEŻKA KRYTYCZNA Ciąg następujących po sobie zadań w ramach projektu trwających najdłużej ze wszystkich możliwych ciągów, mających taką własność, że opóźnienie któregokolwiek z nich opóźni zakończenie
ŚCIEŻKA KRYTYCZNA Ciąg następujących po sobie zadań w ramach projektu trwających najdłużej ze wszystkich możliwych ciągów, mających taką własność, że opóźnienie któregokolwiek z nich opóźni zakończenie
Metoda CPM/PERT. dr inż. Mariusz Makuchowski
 PM - wstęp PM nazwa metody pochodzi od angielskiego ritical Path Method, jest techniką bazującą na grafowej reprezentacji projektu, używana jest dla deterministycznych danych. PM - modele grafowe projektu
PM - wstęp PM nazwa metody pochodzi od angielskiego ritical Path Method, jest techniką bazującą na grafowej reprezentacji projektu, używana jest dla deterministycznych danych. PM - modele grafowe projektu
Zastosowanie symulacji Monte Carlo do zarządzania ryzykiem przedsięwzięcia z wykorzystaniem metod sieciowych PERT i CPM
 SZKOŁA GŁÓWNA HANDLOWA w Warszawie STUDIUM MAGISTERSKIE Kierunek: Metody ilościowe w ekonomii i systemy informacyjne Karol Walędzik Nr albumu: 26353 Zastosowanie symulacji Monte Carlo do zarządzania ryzykiem
SZKOŁA GŁÓWNA HANDLOWA w Warszawie STUDIUM MAGISTERSKIE Kierunek: Metody ilościowe w ekonomii i systemy informacyjne Karol Walędzik Nr albumu: 26353 Zastosowanie symulacji Monte Carlo do zarządzania ryzykiem
Rysunek 8. Rysunek 9.
 Ad 2. Dodatek Excel Add-Ins for Operations Management/Industral Engineering został opracowany przez Paul A. Jensen na uniwersytecie w Teksasie. Dodatek można pobrać ze strony http://www.ormm.net. Po rozpakowaniu
Ad 2. Dodatek Excel Add-Ins for Operations Management/Industral Engineering został opracowany przez Paul A. Jensen na uniwersytecie w Teksasie. Dodatek można pobrać ze strony http://www.ormm.net. Po rozpakowaniu
Zarządzanie projektami. Zarządzanie czasem w projekcie
 Zarządzanie projektami Zarządzanie czasem w projekcie Zarządzanie czasem w projekcie PROJECT TIME MANAGEMENT Zarządzanie czasem - elementy 1. Zarządzanie harmonogramem 2. Określanie działań (określanie
Zarządzanie projektami Zarządzanie czasem w projekcie Zarządzanie czasem w projekcie PROJECT TIME MANAGEMENT Zarządzanie czasem - elementy 1. Zarządzanie harmonogramem 2. Określanie działań (określanie
Zarządzanie czasem projektu
 Zarządzanie czasem projektu Narzędzia i techniki szacowania czasu zadań Opinia ekspertów Szacowanie przez analogię (top-down estimating) stopień wiarygodności = f(podobieństwo zadań), = f(dostęp do wszystkich
Zarządzanie czasem projektu Narzędzia i techniki szacowania czasu zadań Opinia ekspertów Szacowanie przez analogię (top-down estimating) stopień wiarygodności = f(podobieństwo zadań), = f(dostęp do wszystkich
Planowanie przedsięwzięć
 K.Pieńkosz Badania Operacyjne Planowanie przedsięwzięć 1 Planowanie przedsięwzięć Model przedsięwzięcia lista operacji relacje poprzedzania operacji modele operacji funkcja celu planowania K.Pieńkosz Badania
K.Pieńkosz Badania Operacyjne Planowanie przedsięwzięć 1 Planowanie przedsięwzięć Model przedsięwzięcia lista operacji relacje poprzedzania operacji modele operacji funkcja celu planowania K.Pieńkosz Badania
ANALIZA SIECIOWA PROJEKTÓW REALIZACJI
 WYKŁAD 5 ANALIZA SIECIOWA PROJEKTÓW REALIZACJI Podstawowe problemy rozwiązywane z wykorzystaniem programowania sieciowego: zagadnienia transportowe (rozdział zadań przewozowych, komiwojażer najkrótsza
WYKŁAD 5 ANALIZA SIECIOWA PROJEKTÓW REALIZACJI Podstawowe problemy rozwiązywane z wykorzystaniem programowania sieciowego: zagadnienia transportowe (rozdział zadań przewozowych, komiwojażer najkrótsza
Harmonogramowanie przedsięwzięć
 Harmonogramowanie przedsięwzięć Mariusz Kaleta Instytut Automatyki i Informatyki Stosowanej Politechnika Warszawska luty 2014, Warszawa Politechnika Warszawska Harmonogramowanie przedsięwzięć 1 / 25 Wstęp
Harmonogramowanie przedsięwzięć Mariusz Kaleta Instytut Automatyki i Informatyki Stosowanej Politechnika Warszawska luty 2014, Warszawa Politechnika Warszawska Harmonogramowanie przedsięwzięć 1 / 25 Wstęp
Seminarium IO. Zastosowanie algorytmu UCT w Dynamic Vehicle Routing Problem. Michał Okulewicz
 Seminarium IO Zastosowanie algorytmu UCT w Dynamic Vehicle Routing Problem Michał Okulewicz 05.11.2013 Plan prezentacji Przypomnienie Problem DVRP Algorytm UCT Zastosowanie algorytmu UCT/PSO w DVRP Zastosowanie
Seminarium IO Zastosowanie algorytmu UCT w Dynamic Vehicle Routing Problem Michał Okulewicz 05.11.2013 Plan prezentacji Przypomnienie Problem DVRP Algorytm UCT Zastosowanie algorytmu UCT/PSO w DVRP Zastosowanie
Zarządzanie ryzykiem finansowym
 Zarządzanie projektami Wrocław, 30 października 2013 Spis treści Motywacja Rachunek prawdopodobieństwa Koherentne miary ryzyka Przykłady zastosowań Podsumowanie Po co analizować ryzyko na rynkach finansowych?
Zarządzanie projektami Wrocław, 30 października 2013 Spis treści Motywacja Rachunek prawdopodobieństwa Koherentne miary ryzyka Przykłady zastosowań Podsumowanie Po co analizować ryzyko na rynkach finansowych?
Zarządzanie projektami. Tadeusz Trzaskalik
 Zarządzanie projektami Tadeusz Trzaskalik 7.1. Wprowadzenie Słowa kluczowe Projekt Sieć czynności zynność bezpośrednio poprzedzająca Zdarzenie, zdarzenie początkowe, zdarzenie końcowe Właściwa numeracja
Zarządzanie projektami Tadeusz Trzaskalik 7.1. Wprowadzenie Słowa kluczowe Projekt Sieć czynności zynność bezpośrednio poprzedzająca Zdarzenie, zdarzenie początkowe, zdarzenie końcowe Właściwa numeracja
Rozwiązywanie problemów z użyciem Solvera programu Excel
 Rozwiązywanie problemów z użyciem Solvera programu Excel Podstawowe czynności: aktywować dodatek Solver oraz ustawić w jego opcjach maksymalny czas trwania algorytmów na sensowną wartość (np. 30 sekund).
Rozwiązywanie problemów z użyciem Solvera programu Excel Podstawowe czynności: aktywować dodatek Solver oraz ustawić w jego opcjach maksymalny czas trwania algorytmów na sensowną wartość (np. 30 sekund).
Analiza stanów gry na potrzeby UCT w DVRP
 Analiza stanów gry na potrzeby UCT w DVRP Seminarium IO na MiNI 04.11.2014 Michał Okulewicz based on the decision DEC-2012/07/B/ST6/01527 Plan prezentacji Definicja problemu DVRP DVRP na potrzeby UCB Analiza
Analiza stanów gry na potrzeby UCT w DVRP Seminarium IO na MiNI 04.11.2014 Michał Okulewicz based on the decision DEC-2012/07/B/ST6/01527 Plan prezentacji Definicja problemu DVRP DVRP na potrzeby UCB Analiza
Symulowane wyżarzanie dla problemu harmonogramowania projektu z ograniczonymi zasobami. Marcin Klimek *
 Zeszyty Naukowe WWSI, No 15, Vol. 10, 2016, s. 53-65 Symulowane wyżarzanie dla problemu harmonogramowania projektu z ograniczonymi zasobami Marcin Klimek * Państwowa Szkoła Wyższa w Białej Podlaskiej,
Zeszyty Naukowe WWSI, No 15, Vol. 10, 2016, s. 53-65 Symulowane wyżarzanie dla problemu harmonogramowania projektu z ograniczonymi zasobami Marcin Klimek * Państwowa Szkoła Wyższa w Białej Podlaskiej,
Badania operacyjne egzamin
 Imię i nazwisko:................................................... Nr indeksu:............ Zadanie 1 Załóżmy, że Tablica 1 reprezentuje jeden z kroków algorytmu sympleks dla problemu (1)-(4). Tablica
Imię i nazwisko:................................................... Nr indeksu:............ Zadanie 1 Załóżmy, że Tablica 1 reprezentuje jeden z kroków algorytmu sympleks dla problemu (1)-(4). Tablica
BADANIA OPERACYJNE. dr Adam Sojda Pokój A405
 BADANIA OPERACYJNE dr Adam Sojda adam.sojda@polsl.pl http://dydaktyka.polsl.pl/roz6/asojda/default.aspx Pokój A405 Przedsięwzięcie - zorganizowanie działanie ludzkie zmierzające do osiągnięcia określonego
BADANIA OPERACYJNE dr Adam Sojda adam.sojda@polsl.pl http://dydaktyka.polsl.pl/roz6/asojda/default.aspx Pokój A405 Przedsięwzięcie - zorganizowanie działanie ludzkie zmierzające do osiągnięcia określonego
Zastosowanie programowania zero-jedynkowego w harmonogramowaniu czynności projektu
 Zeszyty Naukowe Metody analizy danych Uniwersytet Ekonomiczny w Krakowie 923 ISSN 1898-6447 Zesz. Nauk. UEK, 2013; 923: 99 117 DOI: 10.15678/ZNUEK.2013.0923.08 Katedra Badań Operacyjnych Uniwersytet Ekonomiczny
Zeszyty Naukowe Metody analizy danych Uniwersytet Ekonomiczny w Krakowie 923 ISSN 1898-6447 Zesz. Nauk. UEK, 2013; 923: 99 117 DOI: 10.15678/ZNUEK.2013.0923.08 Katedra Badań Operacyjnych Uniwersytet Ekonomiczny
Sterowanie wykonaniem produkcji
 STEROWANIE WYKONANIEM PRODUKCJI (Production Activity Control - PAC) Sterowanie wykonaniem produkcji (SWP) stanowi najniŝszy, wykonawczy poziom systemu zarządzania produkcją, łączący wyŝsze poziomy operatywnego
STEROWANIE WYKONANIEM PRODUKCJI (Production Activity Control - PAC) Sterowanie wykonaniem produkcji (SWP) stanowi najniŝszy, wykonawczy poziom systemu zarządzania produkcją, łączący wyŝsze poziomy operatywnego
Matematyka ubezpieczeń majątkowych 1.10.2012 r.
 Zadanie. W pewnej populacji każde ryzyko charakteryzuje się trzema parametrami q, b oraz v, o następującym znaczeniu: parametr q to prawdopodobieństwo, że do szkody dojdzie (może zajść co najwyżej jedna
Zadanie. W pewnej populacji każde ryzyko charakteryzuje się trzema parametrami q, b oraz v, o następującym znaczeniu: parametr q to prawdopodobieństwo, że do szkody dojdzie (może zajść co najwyżej jedna
Instrukcja. Laboratorium Metod i Systemów Sterowania Produkcją.
 Instrukcja do Laboratorium Metod i Systemów Sterowania Produkcją. 2010 1 Cel laboratorium Celem laboratorium jest poznanie metod umożliwiających rozdział zadań na linii produkcyjnej oraz sposobu balansowania
Instrukcja do Laboratorium Metod i Systemów Sterowania Produkcją. 2010 1 Cel laboratorium Celem laboratorium jest poznanie metod umożliwiających rozdział zadań na linii produkcyjnej oraz sposobu balansowania
Algorytmy heurystyczne w UCB dla DVRP
 Algorytmy heurystyczne w UCB dla DVRP Seminarium IO na MiNI 24.03.2015 Michał Okulewicz based on the decision DEC-2012/07/B/ST6/01527 Plan prezentacji Definicja problemu DVRP UCB na potrzeby DVRP Algorytmy
Algorytmy heurystyczne w UCB dla DVRP Seminarium IO na MiNI 24.03.2015 Michał Okulewicz based on the decision DEC-2012/07/B/ST6/01527 Plan prezentacji Definicja problemu DVRP UCB na potrzeby DVRP Algorytmy
Wykorzystanie algorytmów mrówkowych w dynamicznym problem
 Wykorzystanie algorytmów mrówkowych w dynamicznym problemie marszrutyzacji Promotor: dr inż. Aneta Poniszewska-Marańda Współpromotor: mgr inż. Łukasz Chomątek 14 czerwca 2013 Przedmiot i cele pracy dyplomowej
Wykorzystanie algorytmów mrówkowych w dynamicznym problemie marszrutyzacji Promotor: dr inż. Aneta Poniszewska-Marańda Współpromotor: mgr inż. Łukasz Chomątek 14 czerwca 2013 Przedmiot i cele pracy dyplomowej
DWUKROTNA SYMULACJA MONTE CARLO JAKO METODA ANALIZY RYZYKA NA PRZYKŁADZIE WYCENY OPCJI PRZEŁĄCZANIA FUNKCJI UŻYTKOWEJ NIERUCHOMOŚCI
 DWUKROTNA SYMULACJA MONTE CARLO JAKO METODA ANALIZY RYZYKA NA PRZYKŁADZIE WYCENY OPCJI PRZEŁĄCZANIA FUNKCJI UŻYTKOWEJ NIERUCHOMOŚCI mgr Marcin Pawlak Katedra Inwestycji i Wyceny Przedsiębiorstw Plan wystąpienia
DWUKROTNA SYMULACJA MONTE CARLO JAKO METODA ANALIZY RYZYKA NA PRZYKŁADZIE WYCENY OPCJI PRZEŁĄCZANIA FUNKCJI UŻYTKOWEJ NIERUCHOMOŚCI mgr Marcin Pawlak Katedra Inwestycji i Wyceny Przedsiębiorstw Plan wystąpienia
WPŁYW TYPU ROZKŁADU CZASU TRWANIA CZYNNOŚCI NA WYNIKI ANALIZY RYZYKA W PLANOWANIU REALIZACJI PRZEDSIĘWZIĘĆ
 Dane bibliograficzne o artykule: http://mieczyslaw_polonski.users.sggw.pl/mppublikacje mgr inż. Wojciech Bogusz dr hab. inż. Mieczysław Połoński, prof. SGGW mgr inż. Kamil Pruszyński Szkoła Główna Gospodarstwa
Dane bibliograficzne o artykule: http://mieczyslaw_polonski.users.sggw.pl/mppublikacje mgr inż. Wojciech Bogusz dr hab. inż. Mieczysław Połoński, prof. SGGW mgr inż. Kamil Pruszyński Szkoła Główna Gospodarstwa
Zarządzanie przedsięwzięciem informatycznym. Śledzenie projektu
 Zarządzanie przedsięwzięciem informatycznym Śledzenie projektu Plan bazowy Plan bazowy jest zapisanym planem oryginalnym projektu, jest trwałym zapisem harmonogramu i kosztów. Plan bazowy zawiera główny
Zarządzanie przedsięwzięciem informatycznym Śledzenie projektu Plan bazowy Plan bazowy jest zapisanym planem oryginalnym projektu, jest trwałym zapisem harmonogramu i kosztów. Plan bazowy zawiera główny
Identyfikacja i pomiar ryzyka pierwszy krok w zarządzaniu ryzykiem.
 Identyfikacja i pomiar ryzyka pierwszy krok w zarządzaniu ryzykiem. Andrzej Podszywałow Własność przemysłowa w innowacyjnej gospodarce. Zarządzanie ryzykiem, strategia zarządzania własnością intelektualną
Identyfikacja i pomiar ryzyka pierwszy krok w zarządzaniu ryzykiem. Andrzej Podszywałow Własność przemysłowa w innowacyjnej gospodarce. Zarządzanie ryzykiem, strategia zarządzania własnością intelektualną
PODEJMOWANIE DECYZJI W WARUNKACH NIEPEŁNEJ INFORMACJI
 Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 5 PODEJMOWANIE DECYZJI W WARUNKACH NIEPEŁNEJ INFORMACJI 5.2. Ćwiczenia komputerowe
Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 5 PODEJMOWANIE DECYZJI W WARUNKACH NIEPEŁNEJ INFORMACJI 5.2. Ćwiczenia komputerowe
Algorytm memetyczny dla rzeczywistego problemu planowania tras pojazdów
 Algorytm memetyczny dla rzeczywistego problemu planowania tras pojazdów Andrzej Jaszkiewicz, Przemysław Wesołek 3 grudnia 2013 Kontekst problemu Firma dystrybucyjna Kilka statystyk (wiedza z danych miesięcznych)
Algorytm memetyczny dla rzeczywistego problemu planowania tras pojazdów Andrzej Jaszkiewicz, Przemysław Wesołek 3 grudnia 2013 Kontekst problemu Firma dystrybucyjna Kilka statystyk (wiedza z danych miesięcznych)
HEURYSTYCZNY ALGORYTM SZEREGOWANIA ZADAŃ W SYSTEMIE MASZYN RÓWNOLEGŁYCH Z KRYTERIUM MINIMALNO-CZASOWYM
 EURYSTYCZNY ALGORYTM SZEREGOWANIA ZADAŃ W SYSTEMIE MASZYN RÓWNOLEGŁYC Z KRYTERIUM MINIMALNO-CZASOWYM Zbigniew BUCALSKI Streszczenie: Artykuł dotyczy zagadnienia czasowo-optymalnego przydziału zasobu podzielnego
EURYSTYCZNY ALGORYTM SZEREGOWANIA ZADAŃ W SYSTEMIE MASZYN RÓWNOLEGŁYC Z KRYTERIUM MINIMALNO-CZASOWYM Zbigniew BUCALSKI Streszczenie: Artykuł dotyczy zagadnienia czasowo-optymalnego przydziału zasobu podzielnego
Wykład Zarządzanie projektami Zajęcia 3 Zarządzanie czasem w projekcie Zarządzanie kosztami projektu
 Wykład Zarządzanie projektami Zajęcia Zarządzanie czasem w projekcie Zarządzanie kosztami projektu dr Stanisław Gasik s.gasik@vistula.edu.pl www.sybena.pl/uv/014-wyklad-eko-zp-9-pl/wyklad.pdf Zarządzanie
Wykład Zarządzanie projektami Zajęcia Zarządzanie czasem w projekcie Zarządzanie kosztami projektu dr Stanisław Gasik s.gasik@vistula.edu.pl www.sybena.pl/uv/014-wyklad-eko-zp-9-pl/wyklad.pdf Zarządzanie
Podejmowanie decyzji w warunkach ryzyka. Tomasz Brzęczek Wydział Inżynierii Zarządzania PP
 Podejmowanie decyzji w warunkach ryzyka Tomasz Brzęczek Wydział Inżynierii Zarządzania PP Ryzyko decyzyjne. Przez ryzyko decyzyjne rozumiemy zmienność wyniku decyzji przedsiębiorstwa spowodowaną losowością
Podejmowanie decyzji w warunkach ryzyka Tomasz Brzęczek Wydział Inżynierii Zarządzania PP Ryzyko decyzyjne. Przez ryzyko decyzyjne rozumiemy zmienność wyniku decyzji przedsiębiorstwa spowodowaną losowością
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: SYSTEMY WSPOMAGANIA DECYZJI. Kod przedmiotu: Ecs 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny. Kierunek: Mechatronika 5. Specjalność: Techniki Komputerowe
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: SYSTEMY WSPOMAGANIA DECYZJI. Kod przedmiotu: Ecs 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny. Kierunek: Mechatronika 5. Specjalność: Techniki Komputerowe
AL 1302 ZARZĄDZANIE PROJEKTAMI W OPARCIU O METODYKĘ PRINCE2
 AL 1302 ZARZĄDZANIE PROJEKTAMI W OPARCIU O METODYKĘ PRINCE2 1. Definicja projektu: cechy projektu, przyczyny porażek projektów, czynniki sukcesu projektów, cele projektu, produkty projektu, cykl życia
AL 1302 ZARZĄDZANIE PROJEKTAMI W OPARCIU O METODYKĘ PRINCE2 1. Definicja projektu: cechy projektu, przyczyny porażek projektów, czynniki sukcesu projektów, cele projektu, produkty projektu, cykl życia
Inżynieria oprogramowania. Część 8: Metoda szacowania ryzyka - PERT
 UNIWERSYTET RZESZOWSKI KATEDRA INFORMATYKI Opracował: mgr inż. Przemysław Pardel v1.01 2010 Inżynieria oprogramowania Część 8: Metoda szacowania ryzyka - PERT ZAGADNIENIA DO ZREALIZOWANIA (3H) PERT...
UNIWERSYTET RZESZOWSKI KATEDRA INFORMATYKI Opracował: mgr inż. Przemysław Pardel v1.01 2010 Inżynieria oprogramowania Część 8: Metoda szacowania ryzyka - PERT ZAGADNIENIA DO ZREALIZOWANIA (3H) PERT...
Heurystyki. Strategie poszukiwań
 Sztuczna inteligencja Heurystyki. Strategie poszukiwań Jacek Bartman Zakład Elektrotechniki i Informatyki Instytut Techniki Uniwersytet Rzeszowski DLACZEGO METODY PRZESZUKIWANIA? Sztuczna Inteligencja
Sztuczna inteligencja Heurystyki. Strategie poszukiwań Jacek Bartman Zakład Elektrotechniki i Informatyki Instytut Techniki Uniwersytet Rzeszowski DLACZEGO METODY PRZESZUKIWANIA? Sztuczna Inteligencja
Metody Optymalizacji: Przeszukiwanie z listą tabu
 Metody Optymalizacji: Przeszukiwanie z listą tabu Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje: wtorek
Metody Optymalizacji: Przeszukiwanie z listą tabu Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje: wtorek
Instytut Politechniczny Państwowa Wyższa Szkoła Zawodowa. Diagnostyka i niezawodność robotów
 Instytut Politechniczny Państwowa Wyższa Szkoła Zawodowa Diagnostyka i niezawodność robotów Laboratorium nr 6 Model matematyczny elementu naprawialnego Prowadzący: mgr inż. Marcel Luzar Cele ćwiczenia:
Instytut Politechniczny Państwowa Wyższa Szkoła Zawodowa Diagnostyka i niezawodność robotów Laboratorium nr 6 Model matematyczny elementu naprawialnego Prowadzący: mgr inż. Marcel Luzar Cele ćwiczenia:
Krótkookresowe planowanie produkcji. Jak skutecznie i efektywnie zaspokoić bieżące potrzeby rynku w krótszym horyzoncie planowania?
 4 Krótkookresowe planowanie produkcji Jak skutecznie i efektywnie zaspokoić bieżące potrzeby rynku w krótszym horyzoncie planowania? Hierarchia systemu zarządzania produkcją DECYZJE DŁUGOOKRESOWE (PROJEKTOWANIE)
4 Krótkookresowe planowanie produkcji Jak skutecznie i efektywnie zaspokoić bieżące potrzeby rynku w krótszym horyzoncie planowania? Hierarchia systemu zarządzania produkcją DECYZJE DŁUGOOKRESOWE (PROJEKTOWANIE)
Matematyka ubezpieczeń majątkowych r.
 Zadanie. W pewnej populacji kierowców każdego jej członka charakteryzują trzy zmienne: K liczba przejeżdżanych kilometrów (w tysiącach rocznie) NP liczba szkód w ciągu roku, w których kierowca jest stroną
Zadanie. W pewnej populacji kierowców każdego jej członka charakteryzują trzy zmienne: K liczba przejeżdżanych kilometrów (w tysiącach rocznie) NP liczba szkód w ciągu roku, w których kierowca jest stroną
ZŁOŻONOŚĆ OBLICZENIOWA ALGORYTMÓW
 ZŁOŻONOŚĆ OBLICZENIOWA ALGORYTMÓW RELACJE MIEDZY KLASAMI ZŁOŻONOŚCI Bartosz Zieliński Katedra Fizyki Teoretycznej i Informatyki Zima 2011-2012 KLASY ZŁOŻONOŚCI KLASE ZŁOŻONOŚCI OPISUJE SIE PODAJAC: Model
ZŁOŻONOŚĆ OBLICZENIOWA ALGORYTMÓW RELACJE MIEDZY KLASAMI ZŁOŻONOŚCI Bartosz Zieliński Katedra Fizyki Teoretycznej i Informatyki Zima 2011-2012 KLASY ZŁOŻONOŚCI KLASE ZŁOŻONOŚCI OPISUJE SIE PODAJAC: Model
Systemy wbudowane - wykład 9. Systemy czasu rzeczywistego Notes. Systemy czasu rzeczywistego Notes. Systemy czasu rzeczywistego Notes.
 Systemy wbudowane - wykład 9 Przemek Błaśkiewicz 26 maja 2017 1 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; 2 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; system
Systemy wbudowane - wykład 9 Przemek Błaśkiewicz 26 maja 2017 1 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; 2 / 93 Systemy czasu rzeczywistego sterowanie silnikiem rakietowym; system
Zarządzanie projektami
 Zarządzanie projektami Dorota Kuchta www.ioz.pwr.wroc.pl/pracownicy/kuchta/dydaktyka.htm Projekt Ma jasny cel Unikatowy zdefiniowany koniec Angażuje zasoby ludzkie Procesy zarządzani projektem Zarządzanie
Zarządzanie projektami Dorota Kuchta www.ioz.pwr.wroc.pl/pracownicy/kuchta/dydaktyka.htm Projekt Ma jasny cel Unikatowy zdefiniowany koniec Angażuje zasoby ludzkie Procesy zarządzani projektem Zarządzanie
Planowanie drogi robota, algorytm A*
 Planowanie drogi robota, algorytm A* Karol Sydor 13 maja 2008 Założenia Uproszczenie przestrzeni Założenia Problem planowania trasy jest bardzo złożony i trudny. W celu uproszczenia problemu przyjmujemy
Planowanie drogi robota, algorytm A* Karol Sydor 13 maja 2008 Założenia Uproszczenie przestrzeni Założenia Problem planowania trasy jest bardzo złożony i trudny. W celu uproszczenia problemu przyjmujemy
Krótkookresowe planowanie produkcji. Jak skutecznie i efektywnie zaspokoić bieżące potrzeby rynku w krótszym horyzoncie planowania?
 4 Krótkookresowe planowanie produkcji Jak skutecznie i efektywnie zaspokoić bieżące potrzeby rynku w krótszym horyzoncie planowania? Hierarchia systemu zarządzania produkcją DECYZJE DŁUGOOKRESOWE (PROJEKTOWANIE)
4 Krótkookresowe planowanie produkcji Jak skutecznie i efektywnie zaspokoić bieżące potrzeby rynku w krótszym horyzoncie planowania? Hierarchia systemu zarządzania produkcją DECYZJE DŁUGOOKRESOWE (PROJEKTOWANIE)
Planowanie projektu. Magdalena Marczewska Wydział Zarządzania UW
 Planowanie projektu mgr Magdalena Marczewska (marczewska.m.a@gmail.com) Zakład Teorii i Metod Organizacji Wydział Zarządzania Uniwersytetu Warszawskiego Część materiałów znajdujących się w niniejszej prezentacji
Planowanie projektu mgr Magdalena Marczewska (marczewska.m.a@gmail.com) Zakład Teorii i Metod Organizacji Wydział Zarządzania Uniwersytetu Warszawskiego Część materiałów znajdujących się w niniejszej prezentacji
Matematyka ubezpieczeń majątkowych r.
 Matematyka ubezpieczeń majątkowych..00 r. Zadanie. Proces szkód w pewnym ubezpieczeniu jest złożonym procesem Poissona z oczekiwaną liczbą szkód w ciągu roku równą λ i rozkładem wartości szkody o dystrybuancie
Matematyka ubezpieczeń majątkowych..00 r. Zadanie. Proces szkód w pewnym ubezpieczeniu jest złożonym procesem Poissona z oczekiwaną liczbą szkód w ciągu roku równą λ i rozkładem wartości szkody o dystrybuancie
Algorytmy z powrotami
 Algorytmy z powrotami Algorytmy z powrotami są wykorzystywane do rozwiązywania problemów, w których z określonego zbioru jest wybierana sekwencja obiektów tak, aby spełniała ona określone kryteria. Klasycznym
Algorytmy z powrotami Algorytmy z powrotami są wykorzystywane do rozwiązywania problemów, w których z określonego zbioru jest wybierana sekwencja obiektów tak, aby spełniała ona określone kryteria. Klasycznym
SYMULACJA RYZYKA CZASOWO-KOSZTOWEGO PRZEDSIĘWZIĘĆ NA TLE METODY PERT/COST
 Dr inż. Tomasz WIATR Politechnika Poznańska SYMULACJA RYZYKA CZASOWO-KOSZTOWEGO PRZEDSIĘWZIĘĆ NA TLE METODY PERT/COST Słowa kluczowe: PERT/cost, symulacja Monte Carlo, Pertmaster Streszczenie Referat stanowi
Dr inż. Tomasz WIATR Politechnika Poznańska SYMULACJA RYZYKA CZASOWO-KOSZTOWEGO PRZEDSIĘWZIĘĆ NA TLE METODY PERT/COST Słowa kluczowe: PERT/cost, symulacja Monte Carlo, Pertmaster Streszczenie Referat stanowi
MAGICIAN: GUIDED UCT. Zastosowanie automatycznie generowanej funkcji oceny w GGP
 MAGICIAN: GUIDED UCT Zastosowanie automatycznie generowanej funkcji oceny w GGP GENERAL GAME PLAYING General Game Playing? Cel: stworzenie systemu umiejącego grać/nauczyć się grać we wszystkie gry Turniej
MAGICIAN: GUIDED UCT Zastosowanie automatycznie generowanej funkcji oceny w GGP GENERAL GAME PLAYING General Game Playing? Cel: stworzenie systemu umiejącego grać/nauczyć się grać we wszystkie gry Turniej
Microsoft EXCEL SOLVER
 Microsoft EXCEL SOLVER 1. Programowanie liniowe z wykorzystaniem dodatku Microsoft Excel Solver Cele Po ukończeniu tego laboratorium słuchacze potrafią korzystając z dodatku Solver: formułować funkcję
Microsoft EXCEL SOLVER 1. Programowanie liniowe z wykorzystaniem dodatku Microsoft Excel Solver Cele Po ukończeniu tego laboratorium słuchacze potrafią korzystając z dodatku Solver: formułować funkcję
Metody przeszukiwania
 Metody przeszukiwania Co to jest przeszukiwanie Przeszukiwanie polega na odnajdywaniu rozwiązania w dyskretnej przestrzeni rozwiązao. Zwykle przeszukiwanie polega na znalezieniu określonego rozwiązania
Metody przeszukiwania Co to jest przeszukiwanie Przeszukiwanie polega na odnajdywaniu rozwiązania w dyskretnej przestrzeni rozwiązao. Zwykle przeszukiwanie polega na znalezieniu określonego rozwiązania
B jest globalnym pokryciem zbioru {d} wtedy i tylko wtedy, gdy {d} zależy od B i nie istnieje B T takie, że {d} zależy od B ;
 Algorytm LEM1 Oznaczenia i definicje: U - uniwersum, tj. zbiór obiektów; A - zbiór atrybutów warunkowych; d - atrybut decyzyjny; IND(B) = {(x, y) U U : a B a(x) = a(y)} - relacja nierozróżnialności, tj.
Algorytm LEM1 Oznaczenia i definicje: U - uniwersum, tj. zbiór obiektów; A - zbiór atrybutów warunkowych; d - atrybut decyzyjny; IND(B) = {(x, y) U U : a B a(x) = a(y)} - relacja nierozróżnialności, tj.
Sztuczna Inteligencja Projekt
 Sztuczna Inteligencja Projekt Temat: Algorytm LEM2 Liczba osób realizujących projekt: 2 1. Zaimplementować algorytm LEM 2. 2. Zaimplementować klasyfikator Classif ier. 3. Za pomocą algorytmu LEM 2 wygenerować
Sztuczna Inteligencja Projekt Temat: Algorytm LEM2 Liczba osób realizujących projekt: 2 1. Zaimplementować algorytm LEM 2. 2. Zaimplementować klasyfikator Classif ier. 3. Za pomocą algorytmu LEM 2 wygenerować
Matematyka ubezpieczeń majątkowych 6.04.2009 r.
 Matematyka ubezpieczeń majątkowych 6.04.009 r. Zadanie. Niech N oznacza liczbę szkód zaszłych w ciągu roku z pewnego ubezpieczenia z czego: M to liczba szkód zgłoszonych przed końcem tego roku K to liczba
Matematyka ubezpieczeń majątkowych 6.04.009 r. Zadanie. Niech N oznacza liczbę szkód zaszłych w ciągu roku z pewnego ubezpieczenia z czego: M to liczba szkód zgłoszonych przed końcem tego roku K to liczba
2. Metody podejmowania decyzji w warunkach pewności... 37
 Spis treści Wstęp... 7 1. Problemy i procesy decyzyjne w organizacji... 11 1.1. Istota decyzji menedżerskich w organizacji... 11 1.2. Sytuacje decyzyjne, problemy decyzyjne i decyzje w organizacji.. 15
Spis treści Wstęp... 7 1. Problemy i procesy decyzyjne w organizacji... 11 1.1. Istota decyzji menedżerskich w organizacji... 11 1.2. Sytuacje decyzyjne, problemy decyzyjne i decyzje w organizacji.. 15
Optymalizacja. Wybrane algorytmy
 dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
Matematyka ubezpieczeń majątkowych r.
 Zadanie. W pewnej populacji kierowców każdego jej członka charakteryzują trzy zmienne: K liczba przejeżdżanych kilometrów (w tysiącach rocznie) NP liczba szkód w ciągu roku, w których kierowca jest stroną
Zadanie. W pewnej populacji kierowców każdego jej członka charakteryzują trzy zmienne: K liczba przejeżdżanych kilometrów (w tysiącach rocznie) NP liczba szkód w ciągu roku, w których kierowca jest stroną
Spis treści 3 SPIS TREŚCI
 Spis treści 3 SPIS TREŚCI PRZEDMOWA... 1. WNIOSKOWANIE STATYSTYCZNE JAKO DYSCYPLINA MATEMATYCZNA... Metody statystyczne w analizie i prognozowaniu zjawisk ekonomicznych... Badania statystyczne podstawowe
Spis treści 3 SPIS TREŚCI PRZEDMOWA... 1. WNIOSKOWANIE STATYSTYCZNE JAKO DYSCYPLINA MATEMATYCZNA... Metody statystyczne w analizie i prognozowaniu zjawisk ekonomicznych... Badania statystyczne podstawowe
Sztuczna Inteligencja i Systemy Doradcze
 ztuczna Inteligencja i ystemy Doradcze Przeszukiwanie przestrzeni stanów Przeszukiwanie przestrzeni stanów 1 Postawienie problemu eprezentacja problemu: stany: reprezentują opisy różnych stanów świata
ztuczna Inteligencja i ystemy Doradcze Przeszukiwanie przestrzeni stanów Przeszukiwanie przestrzeni stanów 1 Postawienie problemu eprezentacja problemu: stany: reprezentują opisy różnych stanów świata
Prawdopodobieństwo i statystyka
 Wykład XIV: Metody Monte Carlo 19 stycznia 2016 Przybliżone obliczanie całki oznaczonej Rozważmy całkowalną funkcję f : [0, 1] R. Chcemy znaleźć przybliżoną wartość liczbową całki 1 f (x) dx. 0 Jeden ze
Wykład XIV: Metody Monte Carlo 19 stycznia 2016 Przybliżone obliczanie całki oznaczonej Rozważmy całkowalną funkcję f : [0, 1] R. Chcemy znaleźć przybliżoną wartość liczbową całki 1 f (x) dx. 0 Jeden ze
Harmonogramowanie produkcji
 Harmonogramowanie produkcji Harmonogramowanie produkcji jest ściśle związane z planowaniem produkcji. Polega na: rozłożeniu w czasie przydziału zasobów do zleceń produkcyjnych, podziale zleceń na partie
Harmonogramowanie produkcji Harmonogramowanie produkcji jest ściśle związane z planowaniem produkcji. Polega na: rozłożeniu w czasie przydziału zasobów do zleceń produkcyjnych, podziale zleceń na partie
Planowanie projektów - ćwiczenia. Opracowała: Nicoletta Baskiewicz Politechnika Częstochowska Wydział Zarządzania
 Planowanie projektów - ćwiczenia Opracowała: Nicoletta Baskiewicz Politechnika Częstochowska Wydział Zarządzania W trakcie realizacji ćwiczeń w ramach przedmiotu PLANOWANIE PROJEKTÓW zgodnie z założeniami
Planowanie projektów - ćwiczenia Opracowała: Nicoletta Baskiewicz Politechnika Częstochowska Wydział Zarządzania W trakcie realizacji ćwiczeń w ramach przedmiotu PLANOWANIE PROJEKTÓW zgodnie z założeniami
Struktury danych i złozoność obliczeniowa. Prof. dr hab. inż. Jan Magott
 Struktury danych i złozoność obliczeniowa Prof. dr hab. inż. Jan Magott Formy zajęć: Wykład 1 godz., Ćwiczenia 1 godz., Projekt 2 godz.. Adres strony z materiałami do wykładu: http://www.zio.iiar.pwr.wroc.pl/sdizo.html
Struktury danych i złozoność obliczeniowa Prof. dr hab. inż. Jan Magott Formy zajęć: Wykład 1 godz., Ćwiczenia 1 godz., Projekt 2 godz.. Adres strony z materiałami do wykładu: http://www.zio.iiar.pwr.wroc.pl/sdizo.html
Rozdział 7 ZARZĄDZANIE PROJEKTAMI
 Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 7 ZARZĄDZANIE PROJEKTAMI 7.2. Ćwiczenia komputerowe Ćwiczenie 7.1 Wykorzystując
Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 7 ZARZĄDZANIE PROJEKTAMI 7.2. Ćwiczenia komputerowe Ćwiczenie 7.1 Wykorzystując
Wstęp do zarządzania projektami
 Wstęp do zarządzania projektami Definicja projektu Projekt to tymczasowe przedsięwzięcie podejmowane w celu wytworzenia unikalnego wyrobu, dostarczenia unikalnej usługi lub uzyskania unikalnego rezultatu.
Wstęp do zarządzania projektami Definicja projektu Projekt to tymczasowe przedsięwzięcie podejmowane w celu wytworzenia unikalnego wyrobu, dostarczenia unikalnej usługi lub uzyskania unikalnego rezultatu.
Zarządzanie projektami. Zarządzanie czasem w projekcie
 Zarządzanie projektami Zarządzanie czasem w projekcie Zarządzanie czasem w projekcie PROJECT TIME MANAGEMENT Zarządzanie czasem - elementy 1. Zarządzanie harmonogramem (zasady, procedury i dokumentacja
Zarządzanie projektami Zarządzanie czasem w projekcie Zarządzanie czasem w projekcie PROJECT TIME MANAGEMENT Zarządzanie czasem - elementy 1. Zarządzanie harmonogramem (zasady, procedury i dokumentacja
Projektowanie systemów informatycznych. Roman Simiński siminskionline.pl. Studium wykonalności
 Projektowanie systemów informatycznych Roman Simiński roman.siminski@us.edu.pl siminskionline.pl Studium wykonalności Główne procesy w realizacji projektu informatycznego Studium wykonalności (ang. feasibility
Projektowanie systemów informatycznych Roman Simiński roman.siminski@us.edu.pl siminskionline.pl Studium wykonalności Główne procesy w realizacji projektu informatycznego Studium wykonalności (ang. feasibility
Opis opcji aktualizacji zadań w programie MS Project 2007
 Mieczysław Połoński SGGW w Warszawie Wydział Budownictwa i Inżynierii Środowiska mieczyslaw_polonski@sggw.pl Opis opcji aktualizacji zadań w programie MS Project 2007 Wybór opcji opisanych poniżej ma decydujący
Mieczysław Połoński SGGW w Warszawie Wydział Budownictwa i Inżynierii Środowiska mieczyslaw_polonski@sggw.pl Opis opcji aktualizacji zadań w programie MS Project 2007 Wybór opcji opisanych poniżej ma decydujący
Szacowanie ryzyka z wykorzystaniem zmiennej losowej o pramatkach rozmytych w oparciu o język BPFPRAL
 Szacowanie ryzyka z wykorzystaniem zmiennej losowej o pramatkach rozmytych w oparciu o język BPFPRAL Mgr inż. Michał Bętkowski, dr inż. Andrzej Pownuk Wydział Budownictwa Politechnika Śląska w Gliwicach
Szacowanie ryzyka z wykorzystaniem zmiennej losowej o pramatkach rozmytych w oparciu o język BPFPRAL Mgr inż. Michał Bętkowski, dr inż. Andrzej Pownuk Wydział Budownictwa Politechnika Śląska w Gliwicach
Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova
 Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova M. Czoków, J. Piersa 2010-12-21 1 Definicja Własności Losowanie z rozkładu dyskretnego 2 3 Łańcuch Markova Definicja Własności Losowanie z rozkładu
Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova M. Czoków, J. Piersa 2010-12-21 1 Definicja Własności Losowanie z rozkładu dyskretnego 2 3 Łańcuch Markova Definicja Własności Losowanie z rozkładu
KOMPUTEROWA SYMULACJA PROCESÓW ZWIĄZANYCH Z RYZYKIEM PRZY WYKORZYSTANIU ŚRODOWISKA ADONIS
 KOMPUTEROWA SYMULACJA PROCESÓW ZWIĄZANYCH Z RYZYKIEM PRZY WYKORZYSTANIU ŚRODOWISKA ADONIS Bogdan RUSZCZAK Streszczenie: Artykuł przedstawia metodę komputerowej symulacji czynników ryzyka dla projektu inwestycyjnego
KOMPUTEROWA SYMULACJA PROCESÓW ZWIĄZANYCH Z RYZYKIEM PRZY WYKORZYSTANIU ŚRODOWISKA ADONIS Bogdan RUSZCZAK Streszczenie: Artykuł przedstawia metodę komputerowej symulacji czynników ryzyka dla projektu inwestycyjnego
Generowanie liczb o zadanym rozkładzie. ln(1 F (y) λ
 λ") Wprowadzenie Generowanie liczb o zadanym rozkładzie Generowanie liczb o zadanym rozkładzie wejście X U(0, 1) wyjście Y z zadanego rozkładu F (y) = 1 e λy y = ln(1 F (y) λ = ln(1 0,1563 0, 5 0,34 Wprowadzenie
Wprowadzenie Generowanie liczb o zadanym rozkładzie Generowanie liczb o zadanym rozkładzie wejście X U(0, 1) wyjście Y z zadanego rozkładu F (y) = 1 e λy y = ln(1 F (y) λ = ln(1 0,1563 0, 5 0,34 Wprowadzenie
N ma rozkład Poissona z wartością oczekiwaną równą 100 M, M M mają ten sam rozkład dwupunktowy o prawdopodobieństwach:
 Zadanie. O niezależnych zmiennych losowych N, M M, M 2, 3 wiemy, że: N ma rozkład Poissona z wartością oczekiwaną równą 00 M, M M mają ten sam rozkład dwupunktowy o prawdopodobieństwach: 2, 3 Pr( M = )
Zadanie. O niezależnych zmiennych losowych N, M M, M 2, 3 wiemy, że: N ma rozkład Poissona z wartością oczekiwaną równą 00 M, M M mają ten sam rozkład dwupunktowy o prawdopodobieństwach: 2, 3 Pr( M = )
Procedura oceny zgodności i wyboru operacji. Procedura naboru i wyboru projektów obejmować będzie następujące działania:
 9. Określenie procedury oceny zgodności operacji z LSR, procedury wyboru operacji przez LGD, procedury odwołania od rozstrzygni ęć organu decyzyjnego w sprawie wyboru operacji w ramach działania, o którym
9. Określenie procedury oceny zgodności operacji z LSR, procedury wyboru operacji przez LGD, procedury odwołania od rozstrzygni ęć organu decyzyjnego w sprawie wyboru operacji w ramach działania, o którym
Projektowanie systemów informatycznych
 Projektowanie systemów informatycznych Zarządzanie projektem Autor Roman Simiński Kontakt roman.siminski@us.edu.pl www.us.edu.pl/~siminski Główne procesy w realizacji projektu informatycznego (ang. feasibility
Projektowanie systemów informatycznych Zarządzanie projektem Autor Roman Simiński Kontakt roman.siminski@us.edu.pl www.us.edu.pl/~siminski Główne procesy w realizacji projektu informatycznego (ang. feasibility
Wykład 1 Próba i populacja. Estymacja parametrów z wykorzystaniem metody bootstrap
 Wykład 1 Próba i populacja. Estymacja parametrów z wykorzystaniem metody bootstrap Magdalena Frąszczak Wrocław, 21.02.2018r Tematyka Wykładów: Próba i populacja. Estymacja parametrów z wykorzystaniem metody
Wykład 1 Próba i populacja. Estymacja parametrów z wykorzystaniem metody bootstrap Magdalena Frąszczak Wrocław, 21.02.2018r Tematyka Wykładów: Próba i populacja. Estymacja parametrów z wykorzystaniem metody
Informatyczne systemy wspomagające analizę ryzyka w procesie budowlanym Computer systems supporting risk analisys in the building process
 Wojciech BOGUSZ Zakład Technologii i Organizacji Robót Inżynieryjnych SGGW Technology and Engineering Management Division WULS Informatyczne systemy wspomagające analizę ryzyka w procesie budowlanym Computer
Wojciech BOGUSZ Zakład Technologii i Organizacji Robót Inżynieryjnych SGGW Technology and Engineering Management Division WULS Informatyczne systemy wspomagające analizę ryzyka w procesie budowlanym Computer
dla t ściślejsze ograniczenie na prawdopodobieństwo otrzymujemy przyjmując k = 1, zaś dla t > t ściślejsze ograniczenie otrzymujemy przyjmując k = 2.
 Zadanie. Dla dowolnej zmiennej losowej X o wartości oczekiwanej μ, wariancji momencie centralnym μ k rzędu k zachodzą nierówności (typu Czebyszewa): ( X μ k Pr > μ + t σ ) 0. k k t σ *
Zadanie. Dla dowolnej zmiennej losowej X o wartości oczekiwanej μ, wariancji momencie centralnym μ k rzędu k zachodzą nierówności (typu Czebyszewa): ( X μ k Pr > μ + t σ ) 0. k k t σ *
Sztuczna Inteligencja i Systemy Doradcze
 Sztuczna Inteligencja i Systemy Doradcze Przeszukiwanie przestrzeni stanów gry Przeszukiwanie przestrzeni stanów gry 1 Gry a problemy przeszukiwania Nieprzewidywalny przeciwnik rozwiązanie jest strategią
Sztuczna Inteligencja i Systemy Doradcze Przeszukiwanie przestrzeni stanów gry Przeszukiwanie przestrzeni stanów gry 1 Gry a problemy przeszukiwania Nieprzewidywalny przeciwnik rozwiązanie jest strategią
Analiza sieciowa projektów- metody: CPM, PERT. A. Kasperski, M. Kulej 1
 Analiza sieciowa projektów- metody: CPM, PERT. A. Kasperski, M. Kulej 1 Określenie projektu Przez projekt rozumie się jednostkowy(najczęściej jednorazowy) proces złożony ze zbioru wzajemnie powiązanych
Analiza sieciowa projektów- metody: CPM, PERT. A. Kasperski, M. Kulej 1 Określenie projektu Przez projekt rozumie się jednostkowy(najczęściej jednorazowy) proces złożony ze zbioru wzajemnie powiązanych
Lab 10. Funkcje w argumentach funkcji metoda Newtona. Synonimy nazw typów danych. Struktury. Tablice struktur.
 Języki i paradygmaty programowania 1 studia stacjonarne 2018/19 Lab 10. Funkcje w argumentach funkcji metoda Newtona. Synonimy nazw typów danych. Struktury. Tablice struktur. 1. Identyfikator funkcji,
Języki i paradygmaty programowania 1 studia stacjonarne 2018/19 Lab 10. Funkcje w argumentach funkcji metoda Newtona. Synonimy nazw typów danych. Struktury. Tablice struktur. 1. Identyfikator funkcji,
Organizacyjny aspekt projektu
 Organizacyjny aspekt projektu Zarządzanie funkcjonalne Zarządzanie między funkcjonalne Osiąganie celów poprzez kierowanie bieżącymi działaniami Odpowiedzialność spoczywa na kierownikach funkcyjnych Efektywność
Organizacyjny aspekt projektu Zarządzanie funkcjonalne Zarządzanie między funkcjonalne Osiąganie celów poprzez kierowanie bieżącymi działaniami Odpowiedzialność spoczywa na kierownikach funkcyjnych Efektywność
9.9 Algorytmy przeglądu
 14 9. PODSTAWOWE PROBLEMY JEDNOMASZYNOWE 9.9 Algorytmy przeglądu Metody przeglądu dla problemu 1 r j,q j C max były analizowane między innymi w pracach 25, 51, 129, 238. Jak dotychczas najbardziej elegancka
14 9. PODSTAWOWE PROBLEMY JEDNOMASZYNOWE 9.9 Algorytmy przeglądu Metody przeglądu dla problemu 1 r j,q j C max były analizowane między innymi w pracach 25, 51, 129, 238. Jak dotychczas najbardziej elegancka
Modelowanie komputerowe
 Modelowanie komputerowe wykład 1- Generatory liczb losowych i ich wykorzystanie dr Marcin Ziółkowski Instytut Matematyki i Informatyki Akademia im. Jana Długosza w Częstochowie 5,12 października 2016 r.
Modelowanie komputerowe wykład 1- Generatory liczb losowych i ich wykorzystanie dr Marcin Ziółkowski Instytut Matematyki i Informatyki Akademia im. Jana Długosza w Częstochowie 5,12 października 2016 r.
Struktury danych i złożoność obliczeniowa. Prof. dr hab. inż. Jan Magott
 Struktury danych i złożoność obliczeniowa Prof. dr hab. inż. Jan Magott Formy zajęć: Wykład 1 godz., Ćwiczenia 2 godz., Projekt 1 godz.. Strona kursu: http://www.zio.iiar.pwr.wroc.pl/sdizo.html Struktury
Struktury danych i złożoność obliczeniowa Prof. dr hab. inż. Jan Magott Formy zajęć: Wykład 1 godz., Ćwiczenia 2 godz., Projekt 1 godz.. Strona kursu: http://www.zio.iiar.pwr.wroc.pl/sdizo.html Struktury
Zadanie 1. O rozkładzie pewnego ryzyka X posiadamy następujące informacje: znamy oczekiwaną wartość nadwyżki ponad 20:
 Zadanie 1. O rozkładzie pewnego ryzyka X posiadamy następujące informacje: znamy oczekiwaną wartość nadwyżki ponad 20: E X 20 8 oraz znamy następujące charakterystyki dotyczące przedziału 10, 20 : 3 Pr
Zadanie 1. O rozkładzie pewnego ryzyka X posiadamy następujące informacje: znamy oczekiwaną wartość nadwyżki ponad 20: E X 20 8 oraz znamy następujące charakterystyki dotyczące przedziału 10, 20 : 3 Pr
Modelowanie rynków finansowych z wykorzystaniem pakietu R
 Modelowanie rynków finansowych z wykorzystaniem pakietu R Metody numeryczne i symulacje stochastyczne Mateusz Topolewski woland@mat.umk.pl Wydział Matematyki i Informatyki UMK Plan działania 1 Całkowanie
Modelowanie rynków finansowych z wykorzystaniem pakietu R Metody numeryczne i symulacje stochastyczne Mateusz Topolewski woland@mat.umk.pl Wydział Matematyki i Informatyki UMK Plan działania 1 Całkowanie
ĆWICZENIE Calowanie pokoju gościnnego Ent-teach Rozdział 6 Zarządzanie Projektem
 ĆWICZENIE Calowanie pokoju gościnnego Ent-teach Rozdział 6 Zarządzanie Projektem Opis ćwiczenia Ty i trójka Twoich przyjaciół decydujecie się przemalować Wasz salon. Aby zrealizować ten projekt, musicie
ĆWICZENIE Calowanie pokoju gościnnego Ent-teach Rozdział 6 Zarządzanie Projektem Opis ćwiczenia Ty i trójka Twoich przyjaciół decydujecie się przemalować Wasz salon. Aby zrealizować ten projekt, musicie