Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej
|
|
|
- Krystian Górecki
- 7 lat temu
- Przeglądów:
Transkrypt
1 Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników drugiej ankiety Delphi w obszarze ROBOTYKA mgr Jan Piwiński Specjalista w projekcie Przemysłowy Instytut Automatyki i Pomiarów
2 INFORMACJE O BADANIU Druga tura badania realizowanego metodą Delphi Główne zagadnienia: Ranking grup technologii wyselekcjonowanych po I ankiecie Delphi z punku widzenia ich priorytetowości, opłacalności i zapotrzebowania; Opracowanie katalogu najważniejszych cech i atrybutów grup technologii oraz analiza ich znaczenia; Opracowanie katalogu sposobów przezwyciężenia barier rozwoju grup technologii oraz wskazanie najbardziej odpowiednich w zakresie: Barier finansowych, prawnych, związanych z jakością i dostępnością zasobów ludzkich, związanych z partnerstwem gospodarczym;
3 INFORMACJE O BADANIU Główne zagadnienia: Wskazanie gałęzi przemysłu oraz województw, które zyskają najwięcej na rozwoju poszczególnych grup technologii; Określenie wielkości zmiany, stanu obecnego wybranego katalogu cech, w stosunku do stanu pożądanego (w ciągu najbliższych 20 lat); Weryfikacja oraz ocena zgodności wartości wskaźników I ankiety Delphi przez Ekspertów Branżowych; Wskazanie i końcowa weryfikacja katalogu najważniejszych technologii w ramach grup technologii.
4 INFORMACJE O BADANIU Respondenci: grupa ekspertów branżowych (ok. 50 w każdym obszarze tematycznym), przedstawiciele nauki oraz przedsiębiorstw; Czas realizacji badania: sierpień i wrzesień 2009 Metoda badawcza: elektroniczny kwestionariusz ankiety dostępny na stronie internetowej projektu dla zarejestrowanych Ekspertów. Na podstawie analizy wyników I ankiety Delphi do dalszego badania zakwalifikowano: - w obszarze AUTOMATYKA 11 grup technologii - w obszarze ROBOTYKA - 11 grup technologii - w obszarze TECHNIKA POMIAROWA 8 grup technologii
5 Innowacyjne grupy technologii w obszarze ROBOTYKI 1. Technologie umożliwiające zwiększenie wydajności robotów przemysłowych (liczba osi > 6; zwiększenie szybkości ruchów; nadanie robotowi funkcji koordynatora; czujniki i funkcje parainteligencji), przy jednoczesnej poprawie bezpieczeństwa użytkowania. 2. Technologie dostosowujące roboty do efektywnej obróbki materiałów; 3. Technologie dostosowujące roboty do efektywnego i niezawodnego wykonywania operacji łączenia części (zgrzewanie, spawanie, klejenie) o wyraźnie zwiększonej jakości i wydajności; 4. Technologie umożliwiające efektywne stosowanie robotów w transporcie bliskim (pakowanie, paletyzowanie, rozładunek, przenoszenie materiałów) i realizacji złożonych czynności transportowych 5. Technologie umożliwiające zwiększenie zakresu stosowania robotów przy produkcji i naprawach samochodów; 6. Technologie umożliwiające istotny rozwój zastosowania robotów w leczeniu, i rehabilitacji, obsłudze i pielęgnacji chorych; 7. Technologie umożliwiające stosowanie robotów w usługach 8. Technologie do stosowania robotów w kontroli i testowaniu produktów technicznych 9. Technologie z wykorzystaniem mikro- i nano-robotów 10. Technologie wykorzystujące autonomiczne roboty mobilne i ich systemy; 11. Technologie stosowania robotów do inspekcji, rozbrajania ładunków i innych czynności zapewniających bezpieczeństwo publiczne.
6 Najważniejsze grupy technologii (wyniki sumaryczne)

7 Najbardziej opłacalne grupy technologii
8 Najbardziej priorytetowe grupy technologii
9 Technologie, na które jest obecnie największe zapotrzebowanie
10 Najważniejsze Technologie w ramach grupy technologii 1. Technologie umożliwiające zwiększenie wydajności robotów przemysłowych (liczba osi > 6; zwiększenie szybkości ruchów; nadanie robotowi funkcji koordynatora; czujniki i funkcje inteligencji), przy jednoczesnej poprawie bezpieczeństwa użytkowania
11 2. Technologie dostosowujące roboty do efektywnej obróbki materiałów
12 3. Technologie dostosowujące roboty do efektywnego i niezawodnego wykonywania operacji łączenia części (zgrzewanie, spawanie, klejenie) o wyraźnie zwiększonej jakości i wydajności
13 4. Technologie umożliwiające efektywne stosowanie robotów w transporcie bliskim (pakowanie, paletyzowanie, rozładunek, przenoszenie materiałów) i realizacji złożonych czynności transportowych
14 5. Technologie umożliwiające zwiększenie zakresu stosowania robotów przy produkcji i naprawach samochodów
15 6. Technologie umożliwiające istotny rozwój zastosowania robotów w leczeniu i rehabilitacji, obsłudze i pielęgnacji chorych
16 7. Technologie umożliwiające stosowanie robotów w usługach
17 8. Technologie do stosowania robotów w kontroli i testowaniu produktów technicznych
18 9. Technologie budowy, sterowania i stosowania nanorobotów oraz umożliwiające stosowanie ich w mikro- i nano-technologiach
19 10. Technologie wykorzystujące autonomiczne roboty mobilne i ich systemy
20 11. Technologie stosowania robotów do inspekcji, rozbrajania ładunków i innych czynności zapewniających bezpieczeństwo publiczne
21 Ranking grup technologii pod względem cech, które są kluczowe i szczególnie ważne z punktu widzenia użytkownika grupy technologii
22 NIEZAWODNOŚĆ
23 BEZPIECZEŃSTWO UŻYTKOWANIA
24 ERGONOMICZNOŚĆ
25 ŁATWOŚĆ UŻYTKOWANIA/ OBŁUGI
26 ŁATWOŚĆ SERWISOWANIA/ MODYFIKACJI
27 ESTETYKA
28 KOSZTY OPRACOWANIA I WDROŻENIA
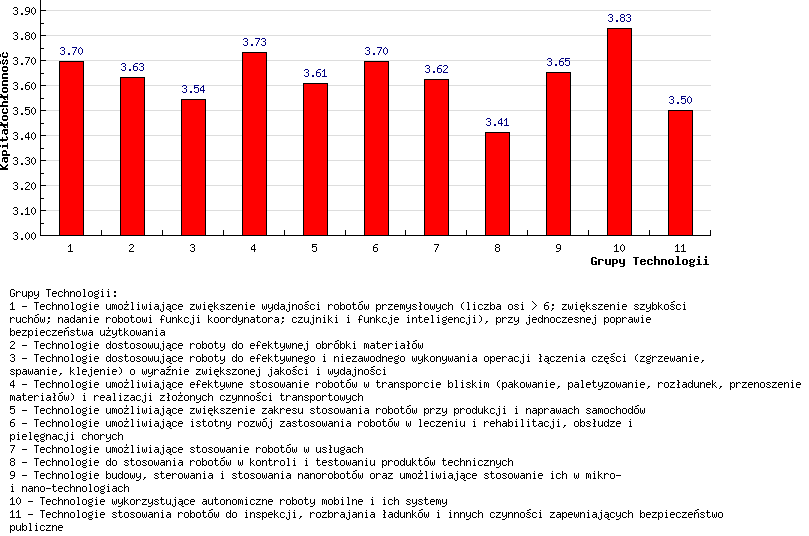
29 KAPITAŁOCHŁONNOŚĆ
30 CENA
31 WYDAJNOŚĆ/EFEKTYWNOŚĆ
")
32 UŻYTECZNOŚĆ (USABILITY)
33 MATERIAŁOCHŁONNOŚĆ

34 PRZYJAZNOŚĆ DLA ŚRODOWISKA
35 ŁATWOŚĆ WDROŻENIA
36 ENERGOOSZCZĘDNOŚĆ
37 ODPORNOŚĆ W WARUNKACH NIESPRZYJAJĄCYCH
38 NIEINWAZYJNOŚĆ
39 CZUŁOŚĆ/SELEKTYWNOŚĆ
40 DOKŁADNOŚĆ
41 Najbardziej odpowiednie sposoby przezwyciężenia bariery rozwoju grupy technologii W ZAKRESIE BARIER FINANSOWYCH
42 1. Technologie umożliwiające zwiększenie wydajności robotów przemysłowych (liczba osi > 6; zwiększenie szybkości ruchów; nadanie robotowi funkcji koordynatora; czujniki i funkcje inteligencji), przy jednoczesnej poprawie bezpieczeństwa użytkowania

43 2. Technologie dostosowujące roboty do efektywnej obróbki materiałów
44 3. Technologie dostosowujące roboty do efektywnego i niezawodnego wykonywania operacji łączenia części (zgrzewanie, spawanie, klejenie) o wyraźnie zwiększonej jakości i wydajności
 i realizacji złożonych czynności")
45 4. Technologie umożliwiające efektywne stosowanie robotów w transporcie bliskim (pakowanie, paletyzowanie, rozładunek, przenoszenie materiałów) i realizacji złożonych czynności transportowych
46 5. Technologie umożliwiające zwiększenie zakresu stosowania robotów przy produkcji i naprawach samochodów
47 6. Technologie umożliwiające istotny rozwój zastosowania robotów w leczeniu i rehabilitacji, obsłudze i pielęgnacji chorych
48 7. Technologie umożliwiające stosowanie robotów w usługach
49 8. Technologie do stosowania robotów w kontroli i testowaniu produktów technicznych
50 9. Technologie budowy, sterowania i stosowania nanorobotów oraz umożliwiające stosowanie ich w mikro- i nano-technologiach
51 10. Technologie wykorzystujące autonomiczne roboty mobilne i ich systemy
52 11. Technologie stosowania robotów do inspekcji, rozbrajania ładunków i innych czynności zapewniających bezpieczeństwo publiczne
53 W ZAKRESIE BARIER PRAWNYCH
, przy jednoczesnej poprawie bezpieczeństwa")
54 1. Technologie umożliwiające zwiększenie wydajności robotów przemysłowych (liczba osi > 6; zwiększenie szybkości ruchów; nadanie robotowi funkcji koordynatora; czujniki i funkcje inteligencji), przy jednoczesnej poprawie bezpieczeństwa użytkowania

55 2. Technologie dostosowujące roboty do efektywnej obróbki materiałów
56 3. Technologie dostosowujące roboty do efektywnego i niezawodnego wykonywania operacji łączenia części (zgrzewanie, spawanie, klejenie) o wyraźnie zwiększonej jakości i wydajności
 i realizacji złożonych czynności")
57 4. Technologie umożliwiające efektywne stosowanie robotów w transporcie bliskim (pakowanie, paletyzowanie, rozładunek, przenoszenie materiałów) i realizacji złożonych czynności transportowych
58 5. Technologie umożliwiające zwiększenie zakresu stosowania robotów przy produkcji i naprawach samochodów

59 6. Technologie umożliwiające istotny rozwój zastosowania robotów w leczeniu i rehabilitacji, obsłudze i pielęgnacji chorych
60 7. Technologie umożliwiające stosowanie robotów w usługach
61 8. Technologie do stosowania robotów w kontroli i testowaniu produktów technicznych
62 9. Technologie budowy, sterowania i stosowania nanorobotów oraz umożliwiające stosowanie ich w mikro- i nano-technologiach

63 10. Technologie wykorzystujące autonomiczne roboty mobilne i ich systemy

64 11. Technologie stosowania robotów do inspekcji, rozbrajania ładunków i innych czynności zapewniających bezpieczeństwo publiczne
65 W ZAKRESIE BARIER ZWIĄZANYCH Z JAKOŚCIĄ I DOSTĘPNOŚCIĄ ZASOBÓW LUDZKICH
66 1. Technologie umożliwiające zwiększenie wydajności robotów przemysłowych (liczba osi > 6; zwiększenie szybkości ruchów; nadanie robotowi funkcji koordynatora; czujniki i funkcje inteligencji), przy jednoczesnej poprawie bezpieczeństwa użytkowania
67 2. Technologie dostosowujące roboty do efektywnej obróbki materiałów
68 3. Technologie dostosowujące roboty do efektywnego i niezawodnego wykonywania operacji łączenia części (zgrzewanie, spawanie, klejenie) o wyraźnie zwiększonej jakości i wydajności
69 4. Technologie umożliwiające efektywne stosowanie robotów w transporcie bliskim (pakowanie, paletyzowanie, rozładunek, przenoszenie materiałów) i realizacji złożonych czynności transportowych
70 5. Technologie umożliwiające zwiększenie zakresu stosowania robotów przy produkcji i naprawach samochodów
71 6. Technologie umożliwiające istotny rozwój zastosowania robotów w leczeniu i rehabilitacji, obsłudze i pielęgnacji chorych
72 7. Technologie umożliwiające stosowanie robotów w usługach
73 8. Technologie do stosowania robotów w kontroli i testowaniu produktów technicznych
74 9. Technologie budowy, sterowania i stosowania nanorobotów oraz umożliwiające stosowanie ich w mikro- i nano-technologiach
75 10. Technologie wykorzystujące autonomiczne roboty mobilne i ich systemy
76 11. Technologie stosowania robotów do inspekcji, rozbrajania ładunków i innych czynności zapewniających bezpieczeństwo publiczne
77 W ZAKRESIE BARIER ZWIĄZANYCH Z PARTNERSTWEM GOSPODARCZYM
78 1. Technologie umożliwiające zwiększenie wydajności robotów przemysłowych (liczba osi > 6; zwiększenie szybkości ruchów; nadanie robotowi funkcji koordynatora; czujniki i funkcje inteligencji), przy jednoczesnej poprawie bezpieczeństwa użytkowania

79 2. Technologie dostosowujące roboty do efektywnej obróbki materiałów
80 3. Technologie dostosowujące roboty do efektywnego i niezawodnego wykonywania operacji łączenia części (zgrzewanie, spawanie, klejenie) o wyraźnie zwiększonej jakości i wydajności
 i realizacji złożonych czynności")
81 4. Technologie umożliwiające efektywne stosowanie robotów w transporcie bliskim (pakowanie, paletyzowanie, rozładunek, przenoszenie materiałów) i realizacji złożonych czynności transportowych

82 5. Technologie umożliwiające zwiększenie zakresu stosowania robotów przy produkcji i naprawach samochodów

83 6. Technologie umożliwiające istotny rozwój zastosowania robotów w leczeniu i rehabilitacji, obsłudze i pielęgnacji chorych

84 7. Technologie umożliwiające stosowanie robotów w usługach

85 8. Technologie do stosowania robotów w kontroli i testowaniu produktów technicznych
86 9. Technologie budowy, sterowania i stosowania nanorobotów oraz umożliwiające stosowanie ich w mikro- i nano-technologiach
87 10. Technologie wykorzystujące autonomiczne roboty mobilne i ich systemy

88 11. Technologie stosowania robotów do inspekcji, rozbrajania ładunków i innych czynności zapewniających bezpieczeństwo publiczne
89 Gałęzie przemysłu oraz województwa, które zyskają najwięcej na rozwoju poszczególnych grup technologii
90 1. Technologie umożliwiające zwiększenie wydajności robotów przemysłowych (liczba osi > 6; zwiększenie szybkości ruchów; nadanie robotowi funkcji koordynatora; czujniki i funkcje inteligencji), przy jednoczesnej poprawie bezpieczeństwa użytkowania
91
92 2. Technologie dostosowujące roboty do efektywnej obróbki materiałów
93
94 3. Technologie dostosowujące roboty do efektywnego i niezawodnego wykonywania operacji łączenia części (zgrzewanie, spawanie, klejenie) o wyraźnie zwiększonej jakości i wydajności
95
96 4. Technologie umożliwiające efektywne stosowanie robotów w transporcie bliskim (pakowanie, paletyzowanie, rozładunek, przenoszenie materiałów) i realizacji złożonych czynności transportowych
97
98 5. Technologie umożliwiające zwiększenie zakresu stosowania robotów przy produkcji i naprawach samochodów
99
100 6. Technologie umożliwiające istotny rozwój zastosowania robotów w leczeniu i rehabilitacji, obsłudze i pielęgnacji chorych
101
102 7. Technologie umożliwiające stosowanie robotów w usługach
103
104 8. Technologie do stosowania robotów w kontroli i testowaniu produktów technicznych
105
106 9. Technologie budowy, sterowania i stosowania nanorobotów oraz umożliwiające stosowanie ich w mikro- i nano-technologiach
107
108 10. Technologie wykorzystujące autonomiczne roboty mobilne i ich systemy
109
110 11. Technologie stosowania robotów do inspekcji, rozbrajania ładunków i innych czynności zapewniających bezpieczeństwo publiczne
111
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej
 Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników drugiej ankiety Delphi w obszarze AUTOMATYKA mgr Jan Piwiński Specjalista w projekcie
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników drugiej ankiety Delphi w obszarze AUTOMATYKA mgr Jan Piwiński Specjalista w projekcie
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej
 Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników drugiej ankiety Delphi w obszarze TECHNIKA POMIAROWA mgr Jan Piwiński Specjalista
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników drugiej ankiety Delphi w obszarze TECHNIKA POMIAROWA mgr Jan Piwiński Specjalista
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej
 Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników pierwszej ankiety Delphi w obszarze TECHNIKA POMIAROWA mgr Jan Piwiński Specjalista
Foresight priorytetowych innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Prezentacja wyników pierwszej ankiety Delphi w obszarze TECHNIKA POMIAROWA mgr Jan Piwiński Specjalista
Foresight ARP. Mgr Jan Piwiński Przemysłowy Instytut Automatyki i Pomiarów
 Foresight ARP Mgr Jan Piwiński Przemysłowy Instytut Automatyki i Pomiarów Foresight priorytetowych, innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Cel projektu Foresight
Foresight ARP Mgr Jan Piwiński Przemysłowy Instytut Automatyki i Pomiarów Foresight priorytetowych, innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Cel projektu Foresight
Foresight priorytetowych, innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej
 Foresight priorytetowych, innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Dr inż. Roman Szewczyk Kierownik projektu Przemysłowy Instytut Automatyki i Pomiarów www.foresightarp.pl
Foresight priorytetowych, innowacyjnych technologii na rzecz automatyki, robotyki i techniki pomiarowej Dr inż. Roman Szewczyk Kierownik projektu Przemysłowy Instytut Automatyki i Pomiarów www.foresightarp.pl
KRZYŻOWA ANALIZA WPŁYWÓW I PROGNOZOWANIE SCENARIUSZY ROZWOJU
 Projekt FORESIGHT Mazovia KRZYŻOWA ANALIZA WPŁYWÓW I PROGNOZOWANIE SCENARIUSZY ROZWOJU mgr Krzysztof Mieczkowski Specjalista Przemysłowy Instytut Automatyki i Pomiarów Warszawa, 12 czerwca 2007 Monitorowanie
Projekt FORESIGHT Mazovia KRZYŻOWA ANALIZA WPŁYWÓW I PROGNOZOWANIE SCENARIUSZY ROZWOJU mgr Krzysztof Mieczkowski Specjalista Przemysłowy Instytut Automatyki i Pomiarów Warszawa, 12 czerwca 2007 Monitorowanie
Innowacyjne rozwiązania!
 R O Z W I Ą Z A N I A B R A N Ż O W E P r z e m y s ł s p o ż y w c z y i o p a k o w a ń Innowacyjne rozwiązania! Firma SCHUNK GmbH & Co. KG to lider w dziedzinie automatyki przemysłowej i systemów mocowań.
R O Z W I Ą Z A N I A B R A N Ż O W E P r z e m y s ł s p o ż y w c z y i o p a k o w a ń Innowacyjne rozwiązania! Firma SCHUNK GmbH & Co. KG to lider w dziedzinie automatyki przemysłowej i systemów mocowań.
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F
 ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
Fundusz Badań i Wdrożeń Voucher Badawczy
 Fundusz Badań i Wdrożeń Voucher Badawczy Projekt będzie realizowany w Partnerstwie 4 instytucji otoczenia biznesu. Kujawsko Pomorska Agencja Innowacji Sp. z o.o. jest Liderem Partnerstwa, a Partnerami
Fundusz Badań i Wdrożeń Voucher Badawczy Projekt będzie realizowany w Partnerstwie 4 instytucji otoczenia biznesu. Kujawsko Pomorska Agencja Innowacji Sp. z o.o. jest Liderem Partnerstwa, a Partnerami
K.Pieńkosz Badania Operacyjne Wprowadzenie 1. Badania Operacyjne. dr inż. Krzysztof Pieńkosz
 K.Pieńkosz Wprowadzenie 1 dr inż. Krzysztof Pieńkosz Instytut Automatyki i Informatyki Stosowanej Politechniki Warszawskiej pok. 560 A tel.: 234-78-64 e-mail: K.Pienkosz@ia.pw.edu.pl K.Pieńkosz Wprowadzenie
K.Pieńkosz Wprowadzenie 1 dr inż. Krzysztof Pieńkosz Instytut Automatyki i Informatyki Stosowanej Politechniki Warszawskiej pok. 560 A tel.: 234-78-64 e-mail: K.Pienkosz@ia.pw.edu.pl K.Pieńkosz Wprowadzenie
Aktualizacja Regionalnej Strategii Innowacji Województwa Kujawsko- Pomorskiego na lata KONSULTACJE SPOŁECZNE
 Aktualizacja Regionalnej Strategii Innowacji Województwa Kujawsko- Pomorskiego na lata 2014-2020 KONSULTACJE SPOŁECZNE Proces opracowania RSI WK-P Dokument opracowany w okresie kwiecień październik 2012
Aktualizacja Regionalnej Strategii Innowacji Województwa Kujawsko- Pomorskiego na lata 2014-2020 KONSULTACJE SPOŁECZNE Proces opracowania RSI WK-P Dokument opracowany w okresie kwiecień październik 2012
Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Uchwała Nr 17/2013/III Senatu Politechniki Lubelskiej z dnia 11 kwietnia 2013 r.
 Uchwała Nr 17/2013/III z dnia 11 kwietnia 2013 r. w sprawie określenia efektów kształcenia dla studiów podyplomowych Projektowanie i Eksploatacja Energooszczędnych Systemów Automatyki Przemysłowej, prowadzonych
Uchwała Nr 17/2013/III z dnia 11 kwietnia 2013 r. w sprawie określenia efektów kształcenia dla studiów podyplomowych Projektowanie i Eksploatacja Energooszczędnych Systemów Automatyki Przemysłowej, prowadzonych
Omówienie metodologii badań wg metody Delphi oraz krzyżowej analizy wpływów
 Projekt Foresight w zakresie priorytetowych i innowacyjnych technologii zagospodarowywania odpadów pochodzących z górnictwa węgla kamiennego Omówienie metodologii badań wg metody Delphi oraz krzyżowej
Projekt Foresight w zakresie priorytetowych i innowacyjnych technologii zagospodarowywania odpadów pochodzących z górnictwa węgla kamiennego Omówienie metodologii badań wg metody Delphi oraz krzyżowej
Konferencja podsumowująca dorobek paneli tematycznych i panelu horyzontalnego w ramach Zadania III
 Katowice, 28.03.2011r. Foresight technologiczny rozwoju sektora usług publicznych w Górnośląskim Obszarze Metropolitalnym Konferencja podsumowująca dorobek paneli tematycznych i panelu horyzontalnego w
Katowice, 28.03.2011r. Foresight technologiczny rozwoju sektora usług publicznych w Górnośląskim Obszarze Metropolitalnym Konferencja podsumowująca dorobek paneli tematycznych i panelu horyzontalnego w
SPIN MODEL TRANSFERU INNOWACJI W MAŁOPOLSCE
 MODEL TRANSFERU INNOWACJI W MAŁOPOLSCE Dr inż. Konrad Maj Dyrektor Departamentu ds. Rozwoju Fundacji Rozwoju Edukacji i Nauki SPIN MODEL TRANSFERU INNOWACJI W MAŁOPOLSCE Projekt innowacyjny testujący wdrażany
MODEL TRANSFERU INNOWACJI W MAŁOPOLSCE Dr inż. Konrad Maj Dyrektor Departamentu ds. Rozwoju Fundacji Rozwoju Edukacji i Nauki SPIN MODEL TRANSFERU INNOWACJI W MAŁOPOLSCE Projekt innowacyjny testujący wdrażany
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
Rola klastrów w nowej perspektywie finansowej
 2 Rola klastrów w nowej perspektywie finansowej Umowa Partnerstwa określiła klastry jako bieguny wzrostu w skali całego kraju i poszczególnych regionów Klastry jako: skuteczny mechanizm koncentrowania
2 Rola klastrów w nowej perspektywie finansowej Umowa Partnerstwa określiła klastry jako bieguny wzrostu w skali całego kraju i poszczególnych regionów Klastry jako: skuteczny mechanizm koncentrowania
Park Naukowo-Technologiczny Uniwersytetu Zielonogórskiego Centrum Technologii Informatycznych
 Uniwersytetu Zielonogórskiego Centrum Technologii Informatycznych dr inż. Wojciech Zając Geneza Przykład wzorowej współpracy interdyscyplinarnej specjalistów z dziedzin: mechaniki, technologii, logistyki,
Uniwersytetu Zielonogórskiego Centrum Technologii Informatycznych dr inż. Wojciech Zając Geneza Przykład wzorowej współpracy interdyscyplinarnej specjalistów z dziedzin: mechaniki, technologii, logistyki,
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Forma studiów: stacjonarne Kierunek studiów: ZiIP Specjalność/Profil: Zarządzanie Jakością i Informatyczne Systemy Produkcji Katedra: Technologii Maszyn i Automatyzacji Produkcji Badania termowizyjne nagrzewania
Forma studiów: stacjonarne Kierunek studiów: ZiIP Specjalność/Profil: Zarządzanie Jakością i Informatyczne Systemy Produkcji Katedra: Technologii Maszyn i Automatyzacji Produkcji Badania termowizyjne nagrzewania
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA
 PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
4. Chwytaki robotów przemysłowych Wstęp Metody doboru chwytaków robotów przemysłowych Zasady projektowania chwytaków robotów
 Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA , M.
 Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA 19.02.2015, M.Wolski #1 Wprowadzenie Agenda prezentacji: O PIAP Strategiczne
Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA 19.02.2015, M.Wolski #1 Wprowadzenie Agenda prezentacji: O PIAP Strategiczne
ŻYWNOŚĆ I ŻYWIENIE W XXI WIEKU WIZJA ROZWOJU POLSKIEGO SEKTORA SPOŻYWCZEGO (FORESIGHT TECHNOLOGICZNY)
") Konferencja Końcowa ŻYWNOŚĆ I ŻYWIENIE W XXI WIEKU WIZJA ROZWOJU POLSKIEGO SEKTORA SPOŻYWCZEGO (FORESIGHT TECHNOLOGICZNY) PROJEKT REALIZUJE KONSORCJUM: Instytut Sadownictwa i Kwiaciarstwa w Skierniewicach
Konferencja Końcowa ŻYWNOŚĆ I ŻYWIENIE W XXI WIEKU WIZJA ROZWOJU POLSKIEGO SEKTORA SPOŻYWCZEGO (FORESIGHT TECHNOLOGICZNY) PROJEKT REALIZUJE KONSORCJUM: Instytut Sadownictwa i Kwiaciarstwa w Skierniewicach
Creative Engineering. Automatyczne rozwiązanie do obróbki den sitowych. W pełni elastyczny i funkcjonalny system produkcji
 rozwiązanie do obróbki den sitowych > www.myrma.eu W pełni elastyczny i funkcjonalny system produkcji rozwiązanie do obróbki den sitowych O rozwiązaniu: Automatyzacja procesów produkcji wymienników ciepła
rozwiązanie do obróbki den sitowych > www.myrma.eu W pełni elastyczny i funkcjonalny system produkcji rozwiązanie do obróbki den sitowych O rozwiązaniu: Automatyzacja procesów produkcji wymienników ciepła
Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu
 Jakub Stec Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu Kraków Globalny lider w technologiach zasilania i automatyki ABB Prezentacja firmy 145,000 pracowników w 100 krajach Roczny
Jakub Stec Robotyka jest prosta gotowe rozwiązania dla różnych gałęzi przemysłu Kraków Globalny lider w technologiach zasilania i automatyki ABB Prezentacja firmy 145,000 pracowników w 100 krajach Roczny
Fundusze Europejskie na rzecz rozwoju przedsiębiorczości i innowacji
 Fundusze Europejskie na rzecz rozwoju przedsiębiorczości i innowacji Webinarium nr 4-8 grudnia 2016 Projekt Fundusze Europejskie na jedynce prasy lokalnej i regionalnej jest realizowany w ramach konkursu
Fundusze Europejskie na rzecz rozwoju przedsiębiorczości i innowacji Webinarium nr 4-8 grudnia 2016 Projekt Fundusze Europejskie na jedynce prasy lokalnej i regionalnej jest realizowany w ramach konkursu
Projekt współfinansowany przez Unię Europejską z Europejskiego Funduszu Rozwoju Regionalnego Fundusze Europejskie dla rozwoju regionu łódzkiego
 Łódź, dn. 10.10.2014 r. OGŁOSZENIE O ZAMÓWIENIU nr 2/3.3/081 (POWYŻEJ 14 tys. EURO) 1. Zamawiający Firma i adres: PL Europa S.A. NIP: 725-195-02-28 Regon: 100381252 2. Tryb udzielenia zamówienia Zgodnie
Łódź, dn. 10.10.2014 r. OGŁOSZENIE O ZAMÓWIENIU nr 2/3.3/081 (POWYŻEJ 14 tys. EURO) 1. Zamawiający Firma i adres: PL Europa S.A. NIP: 725-195-02-28 Regon: 100381252 2. Tryb udzielenia zamówienia Zgodnie
Ogłoszenie nr N-2018 z dnia r. Przemysłowy Instytut Automatyki i Pomiarów PIAP: Dostawa sprzętu komputerowego
 Ogłosze nr 500004564-N-2018 z dnia 08-01-2018 r. Przemysłowy Instytut Automatyki i Pomiarów PIAP: Dostawa sprzętu komputerowego OGŁOSZENIE O UDZIELENIU ZAMÓWIENIA - Dostawy Zamieszcza ogłoszenia: obowiązkowe
Ogłosze nr 500004564-N-2018 z dnia 08-01-2018 r. Przemysłowy Instytut Automatyki i Pomiarów PIAP: Dostawa sprzętu komputerowego OGŁOSZENIE O UDZIELENIU ZAMÓWIENIA - Dostawy Zamieszcza ogłoszenia: obowiązkowe
Inżynieria oprogramowania (Software Engineering) Wykład 1
 Wykład 1") Inżynieria oprogramowania (Software Engineering) Wykład 1 Wprowadzenie do inżynierii oprogramowania Zarządzanie przedmiotem Wydział: WEiI Katedra: KIK Web site: http://moskit.weii.tu.koszalin.pl/~swalover/
Inżynieria oprogramowania (Software Engineering) Wykład 1 Wprowadzenie do inżynierii oprogramowania Zarządzanie przedmiotem Wydział: WEiI Katedra: KIK Web site: http://moskit.weii.tu.koszalin.pl/~swalover/
Uniwersytet Ekonomiczny we Wrocławiu Wrocław 2011
 Uniwersytet Ekonomiczny we Wrocławiu Wrocław 2011 IDENTYFIKACJA POTENCJAŁU I ZASOBÓW DOLNEGO ŚLĄSKA W OBSZARZE NAUKA I TECHNOLOGIE NA RZECZ POPRAWY JAKOŚCI ŻYCL4 (QUALITY OF LIFE) ORAZ WYTYCZENIE PRZYSZŁYCH
Uniwersytet Ekonomiczny we Wrocławiu Wrocław 2011 IDENTYFIKACJA POTENCJAŁU I ZASOBÓW DOLNEGO ŚLĄSKA W OBSZARZE NAUKA I TECHNOLOGIE NA RZECZ POPRAWY JAKOŚCI ŻYCL4 (QUALITY OF LIFE) ORAZ WYTYCZENIE PRZYSZŁYCH
OGŁOSZENIE O ZAMÓWIENIU
 PRECIMET H.C.E. Stanisław Nysiak Łódź, dnia 13.03.2014 r. ul. Pomorska 555, 92-735 Łódź (nazwa i adres Beneficjenta) 728-025-16-80 (NIP Beneficjenta) 470570213 (REGON Beneficjenta) OGŁOSZENIE O ZAMÓWIENIU
PRECIMET H.C.E. Stanisław Nysiak Łódź, dnia 13.03.2014 r. ul. Pomorska 555, 92-735 Łódź (nazwa i adres Beneficjenta) 728-025-16-80 (NIP Beneficjenta) 470570213 (REGON Beneficjenta) OGŁOSZENIE O ZAMÓWIENIU
Research & Development. Zespół R&D
 Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Program wieloletni pn. Poprawa bezpieczeństwa i warunków pracy" etap II / 2011-2013
 Koordynator programu: Centralny Instytut Ochrony Pracy Państwowy Instytut Badawczy Program wieloletni Potrzeba realizacji programu wieloletniego wynikała ze stanu bezpieczeństwa i higieny pracy w Polsce
Koordynator programu: Centralny Instytut Ochrony Pracy Państwowy Instytut Badawczy Program wieloletni Potrzeba realizacji programu wieloletniego wynikała ze stanu bezpieczeństwa i higieny pracy w Polsce
prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski mgr inż. Stanisław Iszora mgr inż. Włodzimierz Sakwiński dr inż.
 Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
Przemysł 4.0 i edukacja
 Opinie przedstawicieli branży motoryzacyjnej, wyzwania, rozwiązania Paweł Gos, Prezes Zarządu Exact Systems S.A. Warszawa, 28 czerwca 2017 O badaniu Zatrudnienie w motoryzacji problemy i wyzwania Kwalifikacje
Opinie przedstawicieli branży motoryzacyjnej, wyzwania, rozwiązania Paweł Gos, Prezes Zarządu Exact Systems S.A. Warszawa, 28 czerwca 2017 O badaniu Zatrudnienie w motoryzacji problemy i wyzwania Kwalifikacje
SEKTOROWY PROGRAM BADAŃ NAUKOWYCH I PRAC ROZWOJOWYCH INNOMOTO
 SEKTOROWY PROGRAM BADAŃ NAUKOWYCH I PRAC ROZWOJOWYCH INNOMOTO INNOMOTO Porozumienie na rzecz ustanowienia sektorowego programu badań naukowych i prac rozwojowych INNOMOTO dla branży motoryzacyjnej POMIĘDZY:
SEKTOROWY PROGRAM BADAŃ NAUKOWYCH I PRAC ROZWOJOWYCH INNOMOTO INNOMOTO Porozumienie na rzecz ustanowienia sektorowego programu badań naukowych i prac rozwojowych INNOMOTO dla branży motoryzacyjnej POMIĘDZY:
MAŁOPOLSKO PODKARPACKIEGO KLASTRA CZYSTEJ ENERGII. 03 czerwca 2008 r
 Możliwości finansowania dla MAŁOPOLSKO PODKARPACKIEGO KLASTRA CZYSTEJ ENERGII 03 czerwca 2008 r OLGA WARZECHA CENTRUM TRANSFERU TECHNOLOGII AGH Dział Obsługi Funduszy Strukturalnych tel. 12 617 31 59 warzecha@agh.edu.pl
Możliwości finansowania dla MAŁOPOLSKO PODKARPACKIEGO KLASTRA CZYSTEJ ENERGII 03 czerwca 2008 r OLGA WARZECHA CENTRUM TRANSFERU TECHNOLOGII AGH Dział Obsługi Funduszy Strukturalnych tel. 12 617 31 59 warzecha@agh.edu.pl
SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE
 PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
Kod Wspólnego Słownika Zamówień:
 PromoTraffic Sp. z o.o. ul. Wadowicka 8A 30-415 Kraków Kraków, 21.12.2015 r. ZAPYTANIE OFERTOWE NR 2/POIR/2015 dotyczące wyboru podwykonawcy części prac merytorycznych projektu przez uczelnię publiczną,
PromoTraffic Sp. z o.o. ul. Wadowicka 8A 30-415 Kraków Kraków, 21.12.2015 r. ZAPYTANIE OFERTOWE NR 2/POIR/2015 dotyczące wyboru podwykonawcy części prac merytorycznych projektu przez uczelnię publiczną,
Energetyka S1. Pierwsza Druga semestru obieralny ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 06
 Energetyka S1 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 06 Podstawy spawalnictwa 10 12 Technologie spajania 8 8 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 09 Rurociągi przemysłowe 5 8 Sieci ciepłownicze
Energetyka S1 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 06 Podstawy spawalnictwa 10 12 Technologie spajania 8 8 ENE_1A_S_2017_2018_1 E semestr 3 Zimowy Blok 09 Rurociągi przemysłowe 5 8 Sieci ciepłownicze
MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces.
 AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
POPRAWA EFEKTYWNOŚCI EKSPLOATACJI MASZYN
 POPRAWA EFEKTYWNOŚCI EKSPLOATACJI MASZYN AGENDA 1. O NAS 2. IDEA ELMODIS 3. SYSTEM ELMODIS 4. KORZYŚCI ELMODIS 5. ZASTOSOWANIE ELMODIS O NAS ELMODIS TO ZESPÓŁ INŻYNIERÓW I SPECJALISTÓW Z DŁUGOLETNIM DOŚWIADCZENIEM
POPRAWA EFEKTYWNOŚCI EKSPLOATACJI MASZYN AGENDA 1. O NAS 2. IDEA ELMODIS 3. SYSTEM ELMODIS 4. KORZYŚCI ELMODIS 5. ZASTOSOWANIE ELMODIS O NAS ELMODIS TO ZESPÓŁ INŻYNIERÓW I SPECJALISTÓW Z DŁUGOLETNIM DOŚWIADCZENIEM
Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML
 Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML Piotr Skrzypczyński Instytut Automatyki, Robotyki i Inżynierii Informatycznej, Politechnika
Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML Piotr Skrzypczyński Instytut Automatyki, Robotyki i Inżynierii Informatycznej, Politechnika
Konferencja Wdrażanie technologii proekologicznych w nowej perspektywie finansowej
 Konferencja Wdrażanie technologii proekologicznych w nowej perspektywie finansowej Plan prezentacji: przedsięwzięcie DEMONSTRATOR+ przedsięwzięcie GO_GLOBAL.PL Daniel Maksym Kierownik Działu Rozwoju Infrastruktury
Konferencja Wdrażanie technologii proekologicznych w nowej perspektywie finansowej Plan prezentacji: przedsięwzięcie DEMONSTRATOR+ przedsięwzięcie GO_GLOBAL.PL Daniel Maksym Kierownik Działu Rozwoju Infrastruktury
GEKON. Program Priorytetowy Narodowego Funduszu Ochrony Środowiska i Gospodarki Wodnej oraz Narodowego Centrum Badań i Rozwoju
 GEKON Program Priorytetowy Narodowego Funduszu Ochrony Środowiska i Gospodarki Wodnej oraz Narodowego Centrum Badań i Rozwoju 1. Tematyka Dofinansowanie badań naukowych, prac rozwojowych i wdrożeniowych
GEKON Program Priorytetowy Narodowego Funduszu Ochrony Środowiska i Gospodarki Wodnej oraz Narodowego Centrum Badań i Rozwoju 1. Tematyka Dofinansowanie badań naukowych, prac rozwojowych i wdrożeniowych
Program sektorowy innowacyjny recykling podstawowe zasady przygotowania projektu. 3 lutego 2017 r.
 Program sektorowy innowacyjny recykling podstawowe zasady przygotowania projektu 3 lutego 2017 r. Luty 2017 1 AGENDA 1. Obszary tematyczne konkursu 2. Objaśnienie podstawowych definicji 3. Finansowanie
Program sektorowy innowacyjny recykling podstawowe zasady przygotowania projektu 3 lutego 2017 r. Luty 2017 1 AGENDA 1. Obszary tematyczne konkursu 2. Objaśnienie podstawowych definicji 3. Finansowanie
PROPOINT sp. z o.o., sp. k. ul. Szobiszowicka 1, 44-100 Gliwice Konkurs ofert. Nazwa i adres zamawiającego:
 ZAPYTANIE OFERTOWE NR 01/04/2015 dotyczące wyboru podwykonawcy części prac merytorycznych projektu przez uczelnię publiczną, państwowy instytut badawczy, instytut PAN lub inną jednostkę naukową będącą
ZAPYTANIE OFERTOWE NR 01/04/2015 dotyczące wyboru podwykonawcy części prac merytorycznych projektu przez uczelnię publiczną, państwowy instytut badawczy, instytut PAN lub inną jednostkę naukową będącą
Rola partnerów przemysłowych w projekcie TALOS
 Rola partnerów przemysłowych w projekcie TALOS mgr Aleksandra Bukała Zastępca Kierownika Ośrodka Systemów Bezpieczeństwa Przemysłowy Instytut Automatyki i Pomiarów Informacje ogólne 7. Program Ramowy Badań
Rola partnerów przemysłowych w projekcie TALOS mgr Aleksandra Bukała Zastępca Kierownika Ośrodka Systemów Bezpieczeństwa Przemysłowy Instytut Automatyki i Pomiarów Informacje ogólne 7. Program Ramowy Badań
Inwestycja w robotyzację
 ASTOR WHITEPAPER Inwestycja w robotyzację Analiza Przygotowanie inwestycji Realizacja inwestycji Wykorzystanie inwestycji krok po kroku 2 ASTOR WHITEPAPER INWESTYCJA W ROBOTYZACJĘ Jak efektywnie zainwestować
ASTOR WHITEPAPER Inwestycja w robotyzację Analiza Przygotowanie inwestycji Realizacja inwestycji Wykorzystanie inwestycji krok po kroku 2 ASTOR WHITEPAPER INWESTYCJA W ROBOTYZACJĘ Jak efektywnie zainwestować
Adres strony internetowej, na której zamieszczona będzie specyfikacja istotnych warunków zamówienia (jeżeli dotyczy):
:") Adres strony internetowej, na której zamieszczona będzie specyfikacja istotnych warunków zamówienia (jeżeli dotyczy): http://www.bip.cen.info.pl/index.php?id=139&id2=110 Ogłosze nr 64982-2017 z dnia 2017-04-12
Adres strony internetowej, na której zamieszczona będzie specyfikacja istotnych warunków zamówienia (jeżeli dotyczy): http://www.bip.cen.info.pl/index.php?id=139&id2=110 Ogłosze nr 64982-2017 z dnia 2017-04-12
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
DRZWI OTWARTE: 16 LUTEGO godz MARCA godz KWIETNIA godz
 ENERGETYK EE.24 - Eksploatacja instalacji i urządzeń do wytwarzania i przesyłania energii cieplnej EE.25 - Eksploatacja instalacji i urządzeń do wytwarzania i przesyłania energii elektrycznej Technik energetyk
ENERGETYK EE.24 - Eksploatacja instalacji i urządzeń do wytwarzania i przesyłania energii cieplnej EE.25 - Eksploatacja instalacji i urządzeń do wytwarzania i przesyłania energii elektrycznej Technik energetyk
Autonomia robotów. Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska
 Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Konferencja podsumowująca dorobek paneli tematycznych i panelu horyzontalnego w ramach Zadania III
 Katowice, 28.03.2011r. Foresight technologiczny rozwoju sektora usług publicznych w Górnośląskim Obszarze Metropolitalnym Konferencja podsumowująca dorobek paneli tematycznych i panelu horyzontalnego w
Katowice, 28.03.2011r. Foresight technologiczny rozwoju sektora usług publicznych w Górnośląskim Obszarze Metropolitalnym Konferencja podsumowująca dorobek paneli tematycznych i panelu horyzontalnego w
do zmieniającej się rzeczywistości.
 TECHNIK LOGISTYK Technik logistyk to nowoczesny i wymagający zawód skierowany do osób przedsiębiorczych, kreatywnych, z wyobraźnią i umiejętnościami planowania oraz organizowania różnego rodzaju przedsięwzięć.
TECHNIK LOGISTYK Technik logistyk to nowoczesny i wymagający zawód skierowany do osób przedsiębiorczych, kreatywnych, z wyobraźnią i umiejętnościami planowania oraz organizowania różnego rodzaju przedsięwzięć.
Uwarunkowania i ekonomiczna ocena wdrażania systemów zarządzania jakością w produkcji i przetwórstwie mięsa wieprzowego mgr inż.
 Uwarunkowania i ekonomiczna ocena wdrażania systemów zarządzania jakością w produkcji i przetwórstwie mięsa wieprzowego mgr inż. Sławomir Stec Zakład Rolnictwa i Rozwoju Obszarów Wiejskich Państwowa Wyższa
Uwarunkowania i ekonomiczna ocena wdrażania systemów zarządzania jakością w produkcji i przetwórstwie mięsa wieprzowego mgr inż. Sławomir Stec Zakład Rolnictwa i Rozwoju Obszarów Wiejskich Państwowa Wyższa
FORUM TERMOMODERNIZACJA 2016
 FORUM TERMOMODERNIZACJA 2016 W dniu 12 kwietnia 2016 roku odbyło się w Warszawie kolejne XVI Forum TERMOMODERNIZACJA. Impreza ta organizowana corocznie przez Zrzeszenie Audytorów Energetycznych skupia
FORUM TERMOMODERNIZACJA 2016 W dniu 12 kwietnia 2016 roku odbyło się w Warszawie kolejne XVI Forum TERMOMODERNIZACJA. Impreza ta organizowana corocznie przez Zrzeszenie Audytorów Energetycznych skupia
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Szczegółowy opis przedmiotu zamówienia
 Załącznik 1 Dotyczy projektu nr WND-RPPD.01.01.00-20-021/13 Badania systemów wbudowanych do sterowania zasilania gazem oraz komunikacji w pojazdach realizowanego na podstawie umowy UDA-RPPD.01.01.00-20-
Załącznik 1 Dotyczy projektu nr WND-RPPD.01.01.00-20-021/13 Badania systemów wbudowanych do sterowania zasilania gazem oraz komunikacji w pojazdach realizowanego na podstawie umowy UDA-RPPD.01.01.00-20-
ZB nr 5 Nowoczesna obróbka mechaniczna stopów magnezu i aluminium
 ZB nr 5 Nowoczesna obróbka mechaniczna stopów magnezu i aluminium Prof. dr hab. inż. Józef Kuczmaszewski CZ 5.1 opracowanie zaawansowanych metod obróbki skrawaniem stopów lekkich stosowanych na elementy
ZB nr 5 Nowoczesna obróbka mechaniczna stopów magnezu i aluminium Prof. dr hab. inż. Józef Kuczmaszewski CZ 5.1 opracowanie zaawansowanych metod obróbki skrawaniem stopów lekkich stosowanych na elementy
Program Operacyjny Polska Wschodnia
 Program Operacyjny Polska Wschodnia 2014-2020 INFORMACJE OGÓLNE Dodatkowe wsparcie dla Polski Wschodniej województw: lubelskiego, podlaskiego, podkarpackiego, świętokrzyskiego i warmińsko-mazurskiego Finansowanie:
Program Operacyjny Polska Wschodnia 2014-2020 INFORMACJE OGÓLNE Dodatkowe wsparcie dla Polski Wschodniej województw: lubelskiego, podlaskiego, podkarpackiego, świętokrzyskiego i warmińsko-mazurskiego Finansowanie:
Instytut Technologii DrewnaInstytut Technologii Drewna. Instytut Technologii Drewna Poznań, 25.06.2009
 SEMINARIUM Drzewnictwo nowe nurty w technice i technologii Instytut Technologii DrewnaInstytut Technologii Drewna 1 Projekt: Foresight w drzewnictwie scenariusze rozwoju badań naukowych w Polsce do 2020
SEMINARIUM Drzewnictwo nowe nurty w technice i technologii Instytut Technologii DrewnaInstytut Technologii Drewna 1 Projekt: Foresight w drzewnictwie scenariusze rozwoju badań naukowych w Polsce do 2020
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
WYNIKI REALIZOWANYCH PROJEKTÓW BADAWCZYCH
 PROPONOWANA TEMATYKA WSPÓŁPRACY prof. dr hab. inż. WOJCIECH KACALAK WYNIKI REALIZOWANYCH PROJEKTÓW BADAWCZYCH 00:00:00 --:-- --.--.---- 1 111 PROPOZYCJE PROPOZYCJE DO WSPÓŁPRACY Z PRZEMYSŁEM W ZAKRESIE
PROPONOWANA TEMATYKA WSPÓŁPRACY prof. dr hab. inż. WOJCIECH KACALAK WYNIKI REALIZOWANYCH PROJEKTÓW BADAWCZYCH 00:00:00 --:-- --.--.---- 1 111 PROPOZYCJE PROPOZYCJE DO WSPÓŁPRACY Z PRZEMYSŁEM W ZAKRESIE
Projekt Polsko niemiecki system transferu ekoinnowacji
 Projekt Polsko niemiecki system transferu ekoinnowacji Michał Rzepecki Agencja Rozwoju Regionalnego S.A. Konferencja inauguracyjna Gorzów Wielkopolski, 11.12.2013 r. Cele projektu (1) Podniesienie zdolności
Projekt Polsko niemiecki system transferu ekoinnowacji Michał Rzepecki Agencja Rozwoju Regionalnego S.A. Konferencja inauguracyjna Gorzów Wielkopolski, 11.12.2013 r. Cele projektu (1) Podniesienie zdolności
Metodyka projektowania komputerowych systemów sterowania
 Metodyka projektowania komputerowych systemów sterowania Andrzej URBANIAK Metodyka projektowania KSS (1) 1 Projektowanie KSS Analiza wymagań Opracowanie sprzętu Projektowanie systemu Opracowanie oprogramowania
Metodyka projektowania komputerowych systemów sterowania Andrzej URBANIAK Metodyka projektowania KSS (1) 1 Projektowanie KSS Analiza wymagań Opracowanie sprzętu Projektowanie systemu Opracowanie oprogramowania
PRZEDSIĘWZIĘCIA MORSKIE W KRAJOWYM PROGRAMIE KOSMICZNYM
 PRZEDSIĘWZIĘCIA MORSKIE W KRAJOWYM PROGRAMIE KOSMICZNYM Bogdan Wiszniewski Polska Agencja Kosmiczna Gdańsk, 20.11.2018 PLAN PREZENTACJI Wyzwania Zakres działań Oczekiwania Propozycje (kosmicznych) przedsięwzięć
PRZEDSIĘWZIĘCIA MORSKIE W KRAJOWYM PROGRAMIE KOSMICZNYM Bogdan Wiszniewski Polska Agencja Kosmiczna Gdańsk, 20.11.2018 PLAN PREZENTACJI Wyzwania Zakres działań Oczekiwania Propozycje (kosmicznych) przedsięwzięć
Zał. nr 5 do procedury oceny operacji wersja 1.1
 Zał. nr 5 do procedury oceny operacji wersja 1.1 Miejsce na pieczątkę ARKUSZ OCENY ZGODNOŚCI OPERACJI Z LSR 2014-2020 w zakresie celów Wniosku Lokalna Grupa Działania Partnerstwo Ducha Gór Imię i nazwisko
Zał. nr 5 do procedury oceny operacji wersja 1.1 Miejsce na pieczątkę ARKUSZ OCENY ZGODNOŚCI OPERACJI Z LSR 2014-2020 w zakresie celów Wniosku Lokalna Grupa Działania Partnerstwo Ducha Gór Imię i nazwisko
Elektrotechnika I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
witamy w świecie KUKA Robotics Robotyzacja według KUKA Roboter KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła Strona 1
 witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
Jędrzej Kasprzak Wielkopolski Instytut Jakości Poznań
 Budowa i wdrożenie proinnowacyjnych usług optymalizacji dla MŚP opartych na zintegrowanym systemie eksperckim doświadczenia z realizacji projektu Jędrzej Kasprzak Wielkopolski Instytut Jakości Poznań Ogólne
Budowa i wdrożenie proinnowacyjnych usług optymalizacji dla MŚP opartych na zintegrowanym systemie eksperckim doświadczenia z realizacji projektu Jędrzej Kasprzak Wielkopolski Instytut Jakości Poznań Ogólne
Analiza badań Instytutu Doradztwa Sp. z o.o. na potrzeby konkursu POKL/2.1.1/2012/ZS
 W dniach 21-3.1.213 r. Instytut Doradztwa Sp. z o.o. przeprowadził analizę rynkową MMSP z branży budowlanej z obszaru RP. Badania miały formę diagnozy potrzeb firm budowlanych i identyfikacji kierunków
W dniach 21-3.1.213 r. Instytut Doradztwa Sp. z o.o. przeprowadził analizę rynkową MMSP z branży budowlanej z obszaru RP. Badania miały formę diagnozy potrzeb firm budowlanych i identyfikacji kierunków
Innowacyjność w włókiennictwie
 Innowacyjność w włókiennictwie NOWOCZESNE TECHNOLOGIE DLA WŁÓKIENNICTWA SZANSA DLA POLSKI koordynator : dr inż. Danuta Ciechańska Priorytet I Badania i rozwój nowoczesnych technologii Działanie 1.1 Wsparcie
Innowacyjność w włókiennictwie NOWOCZESNE TECHNOLOGIE DLA WŁÓKIENNICTWA SZANSA DLA POLSKI koordynator : dr inż. Danuta Ciechańska Priorytet I Badania i rozwój nowoczesnych technologii Działanie 1.1 Wsparcie
PLAN DZIAŁANIA KT 317 ds. Wentylacji i Klimatyzacji
 Strona 1 PLAN DZIAŁANIA KT 317 ds. Wentylacji i Klimatyzacji STRESZCZENIE KT ds. Wentylacji i Klimatyzacji obejmuje swoim zakresem systemy wentylacji i klimatyzacji w budynkach mieszkalnych zamieszkania
Strona 1 PLAN DZIAŁANIA KT 317 ds. Wentylacji i Klimatyzacji STRESZCZENIE KT ds. Wentylacji i Klimatyzacji obejmuje swoim zakresem systemy wentylacji i klimatyzacji w budynkach mieszkalnych zamieszkania
Zespół Szkół Technicznych w Turku
 Tytuł projektu: Kształcenie zawodowe młodzieży priorytetem w rozwoju społeczno-gospodarczym powiatów tureckiego i kolskiego Numer projektu: RPWP.08.03.01-30-0009/16 Okres realizacji: 31.12.2016-30.12.2019
Tytuł projektu: Kształcenie zawodowe młodzieży priorytetem w rozwoju społeczno-gospodarczym powiatów tureckiego i kolskiego Numer projektu: RPWP.08.03.01-30-0009/16 Okres realizacji: 31.12.2016-30.12.2019
AUTOMATYZACJA TRANSPORTU OPON
 BEZPIECZNA JAZDA ZACZYNA SIĘ NA TAŚMIE PRODUKCYJNEJ AUTOMATYZACJA TRANSPORTU OPON BEZPIECZEŃSTWO ZWIĘKSZENIE PRODUKCJI NIEZAWODNOŚĆ PROCESÓW SKUTECZNE WYKORZYSTANIE ZASOBÓW KNOW-HOW W BRANŻY OPONIARSKIEJ
BEZPIECZNA JAZDA ZACZYNA SIĘ NA TAŚMIE PRODUKCYJNEJ AUTOMATYZACJA TRANSPORTU OPON BEZPIECZEŃSTWO ZWIĘKSZENIE PRODUKCJI NIEZAWODNOŚĆ PROCESÓW SKUTECZNE WYKORZYSTANIE ZASOBÓW KNOW-HOW W BRANŻY OPONIARSKIEJ
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
WSPARCIE W ZAKRESIE DZIAŁALNOŚCI BADAWCZEJ PRZEDSIĘBIORSTW
 WSPARCIE W ZAKRESIE DZIAŁALNOŚCI BADAWCZEJ PRZEDSIĘBIORSTW Fundusz Badań i Wdrożeń Voucher Badawczy (Poddziałanie 1.2.1 RPO WKP) Na co można otrzymać dofinansowanie? W ramach Projektu Fundusz Badań i Wdrożeń
WSPARCIE W ZAKRESIE DZIAŁALNOŚCI BADAWCZEJ PRZEDSIĘBIORSTW Fundusz Badań i Wdrożeń Voucher Badawczy (Poddziałanie 1.2.1 RPO WKP) Na co można otrzymać dofinansowanie? W ramach Projektu Fundusz Badań i Wdrożeń
Zintegrowana Strategia Umiejętności
 Instytut Badań Edukacyjnych dr Dominika Walczak Kierownik Zespołu Badań i Analiz Edukacyjnych Ekspert opiekun merytoryczny ZSK3 6 czerwca 2019 Zintegrowana Strategia Umiejętności stan prac, znaczenie,
Instytut Badań Edukacyjnych dr Dominika Walczak Kierownik Zespołu Badań i Analiz Edukacyjnych Ekspert opiekun merytoryczny ZSK3 6 czerwca 2019 Zintegrowana Strategia Umiejętności stan prac, znaczenie,
Mechanika Robotów. Wojciech Lisowski. 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
BADANIE POTRZEB SZKOLENIOWYCH MIKRO, MAŁYCH I ŚREDNICH PRZEDSIEBIORSTW BRANŻY BUDOWLANEJ Z WOJEWÓDZTWA PODKARPACKIEGO
 BADANIE POTRZEB SZKOLENIOWYCH MIKRO, MAŁYCH I ŚREDNICH PRZEDSIEBIORSTW BRANŻY BUDOWLANEJ Z WOJEWÓDZTWA PODKARPACKIEGO BADANIE WŁASNE FIRMY INSTYTUT SZKOLEŃ I DORADZTWA sierpień 2012 NA POTRZEBY PRZYGOTOWANIA
BADANIE POTRZEB SZKOLENIOWYCH MIKRO, MAŁYCH I ŚREDNICH PRZEDSIEBIORSTW BRANŻY BUDOWLANEJ Z WOJEWÓDZTWA PODKARPACKIEGO BADANIE WŁASNE FIRMY INSTYTUT SZKOLEŃ I DORADZTWA sierpień 2012 NA POTRZEBY PRZYGOTOWANIA
POWIATOWY URZĄD PRACY w PRZEMYŚLU ul. Katedralna 5 37-700 Przemyśl Centrum Aktywizacji Zawodowej Dział Poradnictwa i Rozwoju Zawodowego MODYFIKACJA
 PZ.533. 11.MO. POWIATOWY URZĄD PRACY w PRZEMYŚLU ul. Katedralna 5 37-700 Przemyśl Centrum Aktywizacji Zawodowej Dział Poradnictwa i Rozwoju Zawodowego MODYFIKACJA Przemyśl 19.06.r. Źródła finansowania
PZ.533. 11.MO. POWIATOWY URZĄD PRACY w PRZEMYŚLU ul. Katedralna 5 37-700 Przemyśl Centrum Aktywizacji Zawodowej Dział Poradnictwa i Rozwoju Zawodowego MODYFIKACJA Przemyśl 19.06.r. Źródła finansowania
Tok Specjalność Semestr Z / L Blok Przedmiot
 ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
Innowacyjne wykorzystanie coachingu do wspierania równowagi praca-rodzina. Kraków, 14marca 2012 rok
 Innowacyjne wykorzystanie coachingu do wspierania równowagi praca-rodzina Kraków, 14marca 2012 rok Proces certyfikacji Niezbędna część produktu innowacyjnego Certyfikacja jako narzędzie włączania produktu
Innowacyjne wykorzystanie coachingu do wspierania równowagi praca-rodzina Kraków, 14marca 2012 rok Proces certyfikacji Niezbędna część produktu innowacyjnego Certyfikacja jako narzędzie włączania produktu
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
PRODZIEKAN WYDZIAŁ MECHANICZNEGO DR. HAB. INŻ. WITOLD PAWŁOWSKI PROF. NADZW.
 PRODZIEKAN WYDZIAŁ MECHANICZNEGO DR. HAB. INŻ. WITOLD PAWŁOWSKI PROF. NADZW. 1 Sprzężenie zapisanych danych pomiarowych wydolności ruchowej z doborem typu i zakresu ćwiczeń Spersonifikowane predefiniowane
PRODZIEKAN WYDZIAŁ MECHANICZNEGO DR. HAB. INŻ. WITOLD PAWŁOWSKI PROF. NADZW. 1 Sprzężenie zapisanych danych pomiarowych wydolności ruchowej z doborem typu i zakresu ćwiczeń Spersonifikowane predefiniowane
ZAPYTANIE OFERTOWE NR 1/POIR/DIAGSTAR/2017/W
 1 Invenco Sp. z o.o., al. Bernardyńska 1/69, 0-904 Warszawa, Polska ZAPYTANIE OFERTOWE NR 1/POIR/DIAGSTAR/017/W dotyczące zatrudnienia na umowę zlecenia osoby na stanowisko Konsultanta ds. robotyki mobilnej
1 Invenco Sp. z o.o., al. Bernardyńska 1/69, 0-904 Warszawa, Polska ZAPYTANIE OFERTOWE NR 1/POIR/DIAGSTAR/017/W dotyczące zatrudnienia na umowę zlecenia osoby na stanowisko Konsultanta ds. robotyki mobilnej
SPOTKANIE 8 stycznia Instytut Zaawansowanych Technologii Wytwarzania
 SPOTKANIE 8 stycznia 2018 Instytut Zaawansowanych Technologii Wytwarzania Instytut Zaawansowanych Technologii Wytwarzania wspiera małopolskich przedsiębiorców poprzez działania Centrum Transferu Wiedzy,
SPOTKANIE 8 stycznia 2018 Instytut Zaawansowanych Technologii Wytwarzania Instytut Zaawansowanych Technologii Wytwarzania wspiera małopolskich przedsiębiorców poprzez działania Centrum Transferu Wiedzy,
Sage - BI Warszawa, 18.V.2016
 Sage - BI Warszawa, 18.V.2016 Jak wykorzystać dostęp do informacji w podejmowaniu dobrych decyzji biznesowych? Aneta Jarczyńska 18.05.2016 5/23/2016 3 BIBIBI 5/23/2016 4 Czy moja firma jest gotowa na wykorzystanie
Sage - BI Warszawa, 18.V.2016 Jak wykorzystać dostęp do informacji w podejmowaniu dobrych decyzji biznesowych? Aneta Jarczyńska 18.05.2016 5/23/2016 3 BIBIBI 5/23/2016 4 Czy moja firma jest gotowa na wykorzystanie
Lista projektów ocenionych w ramach kryteriów dopuszczających
 Lista projektów ocenionych w ramach kryteriów dopuszczających Konkurs nr RPKP.01.03.01-IZ.00-04-033/16 dla Osi Priorytetowej 1. Wzmocnienie innowacyjności i konkurencyjności gospodarki regionu Działania
Lista projektów ocenionych w ramach kryteriów dopuszczających Konkurs nr RPKP.01.03.01-IZ.00-04-033/16 dla Osi Priorytetowej 1. Wzmocnienie innowacyjności i konkurencyjności gospodarki regionu Działania
ZASTOSOWANIA KOGNITYWISTYKI
 ZASTOSOWANIA KOGNITYWISTYKI PODSUMOWANIE ANALIZY PUBLIKACJI Z ZAKRESU KOGNITYWISTYKI RODZIAŁY W KSIĄŻKACH NAPISANE PRZEZ POLSKICH AUTORÓW Kraków, 2 ANALIZA PUBLIKACJI Z ZAKRESU KOGNITYWISTYKI Rozdziały
ZASTOSOWANIA KOGNITYWISTYKI PODSUMOWANIE ANALIZY PUBLIKACJI Z ZAKRESU KOGNITYWISTYKI RODZIAŁY W KSIĄŻKACH NAPISANE PRZEZ POLSKICH AUTORÓW Kraków, 2 ANALIZA PUBLIKACJI Z ZAKRESU KOGNITYWISTYKI Rozdziały
Szkolenie dla potencjalnych beneficjentów osi priorytetowej I, działania 1.2 Badania przemysłowe, prace rozwojowe i ich wdrożenia, typ: Prace B+R
 Szkolenie dla potencjalnych beneficjentów osi priorytetowej I, działania 1.2 Badania przemysłowe, prace rozwojowe i ich wdrożenia, typ: Prace B+R Rzeszów, 12 grudnia 2016 r. Departament Wspierania Przedsiębiorczości
Szkolenie dla potencjalnych beneficjentów osi priorytetowej I, działania 1.2 Badania przemysłowe, prace rozwojowe i ich wdrożenia, typ: Prace B+R Rzeszów, 12 grudnia 2016 r. Departament Wspierania Przedsiębiorczości
Praca dyplomowa. Autor: Magdalena Karaś. Opiekun pracy: dr inż. Stanisław Zając
 Praca dyplomowa Ocena wdrożenia oraz skuteczności wykorzystania metod, narzędzi i technik zarządzania jakością w przedsiębiorstwach przemysłu spożywczego Autor: Magdalena Karaś Opiekun pracy: dr inż. Stanisław
Praca dyplomowa Ocena wdrożenia oraz skuteczności wykorzystania metod, narzędzi i technik zarządzania jakością w przedsiębiorstwach przemysłu spożywczego Autor: Magdalena Karaś Opiekun pracy: dr inż. Stanisław
RAPORT Z KONSULTACJI SPOŁECZNYCH. projektu Programu Operacyjnego Inteligentny Rozwój, 2014-2020. Grudzień 2013 r.
 RAPORT Z KONSULTACJI SPOŁECZNYCH projektu Programu Operacyjnego Inteligentny Rozwój, 2014-2020 Grudzień 2013 r. 1 1. Podstawy prawne Zgodnie z art. 19a ust. 1 ustawy z dnia 6 grudnia 2006 r. o zasadach
RAPORT Z KONSULTACJI SPOŁECZNYCH projektu Programu Operacyjnego Inteligentny Rozwój, 2014-2020 Grudzień 2013 r. 1 1. Podstawy prawne Zgodnie z art. 19a ust. 1 ustawy z dnia 6 grudnia 2006 r. o zasadach
 OGŁOSZENIE KONKURSOWE I ZAMAWIAJĄCY A. Nazwa: Dyrektor Narodowego Centrum Badań i Rozwoju B. Adres: 00-695 Warszawa, ul. Nowogrodzka 47a C. Adres internetowy: www.ncbir.pl D. Dokumenty dotyczące konkursu
OGŁOSZENIE KONKURSOWE I ZAMAWIAJĄCY A. Nazwa: Dyrektor Narodowego Centrum Badań i Rozwoju B. Adres: 00-695 Warszawa, ul. Nowogrodzka 47a C. Adres internetowy: www.ncbir.pl D. Dokumenty dotyczące konkursu
Foresight Polska 2020
 Foresight Polska 2020 Narodowy Program Foresight Polska 2020 Perspektywy udziału członków PPT BPP Cele Programu Foresight Polska 2020 określenie wizji rozwojowej Polski do 2020 roku określenie priorytetowych
Foresight Polska 2020 Narodowy Program Foresight Polska 2020 Perspektywy udziału członków PPT BPP Cele Programu Foresight Polska 2020 określenie wizji rozwojowej Polski do 2020 roku określenie priorytetowych
Dotacje na innowacje. Inwestujemy w Waszą przyszłość ZAPYTANIE OFERTOWE
 GlobProc Sp. z o. o. ul. Św. Ducha 20/6 87-100 Toruń Toruń, 7.01.2014 ZAPYTANIE OFERTOWE Zwracamy się z prośbą o przedstawienie oferty handlowej na planowany zakup kompleksowej usługi realizacji zadań
GlobProc Sp. z o. o. ul. Św. Ducha 20/6 87-100 Toruń Toruń, 7.01.2014 ZAPYTANIE OFERTOWE Zwracamy się z prośbą o przedstawienie oferty handlowej na planowany zakup kompleksowej usługi realizacji zadań