CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE UKŁADÓW DYNAMICZNYCH
|
|
|
- Jadwiga Wójcik
- 7 lat temu
- Przeglądów:
Transkrypt
1 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE UKŁADÓW DYNAMICZNYCH Zadanie 1. (Charaterytyi czętotliwościowe) Problem: Wyznaczyć charaterytyi czętotliwościowe (amplitudową i fazową) członu całującego rzeczywitego (z inercją) G () Rozwiązanie: T ( +1) ( Tjω + ) ( jω) ( 1 Tjω) Do tranformaty wtawiamy jω + Tω G ( jω) (1) jω 4 ( T ω + 1) ω T + 1 ω ω jω, natępnie uwalniamy mianowni od części urojonej (mnożymy mianowni przez przężenie), przy czym należy pamiętać, iż j 1 P( ω) Q( ω) Grupujemy na część rzeczywitą i urojoną by móc zatoować wzór na pulacje ( ω) ( P( ω) ) ( Q( ω )) A + Tω ω G ( jω) j () 4 4 ω T + ω ω T + ω Wyznaczamy pulacje uładu Wyonujemy prote przeztałcenia matematyczce A ( ω) T Tω 4 ω ω T + 4 ω + ω 4 ( ω T + ω ) ω j 4 ω T + ω (3) Doprowadzamy do wyznaczenia i ω A ω 4 ( ) ( T ω + ω ) 1 ω 4 ( ω T + ω ) ω ( ω T + 1) ω T + 1 (4)
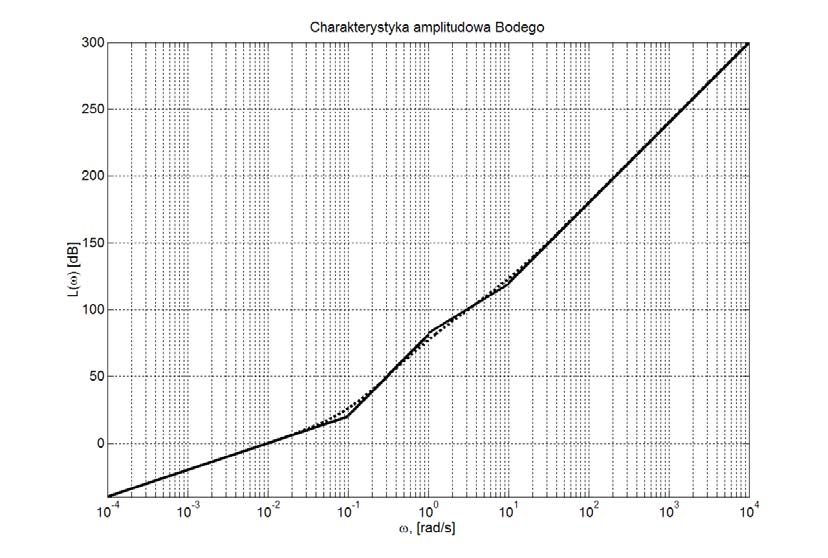
2 Wyznaczamy rzędnych faza ϕ (ω ) ϕ π 4 ( ω) arctg ω T + ω + arctgωt ω Tω 4 ω T + ω Wyznaczamy fazę φ(ω) ze wzoru : Q ( ) ( ω) ( ) ϕ ω arctg P (5) Moduł L(ω ) tranmitancji widmowej G(jω ) L ( ω) 0log 0lg ω T ω + 1 ( ) 0lg( ω T ω + 1) Obliczamy moduł L(ω ) tranmitancji widmowej G(jω ) wyrażony w decybelach, wzór z tórego orzytaliśmy L( ω) 0lg( A( ω) ) wyliczenia przeprowadzamy by móc naryować charaterytyę amplitudową Bodego. (6) Ry.1 Charaterytya amplitudowa Bodego dla 10, T1
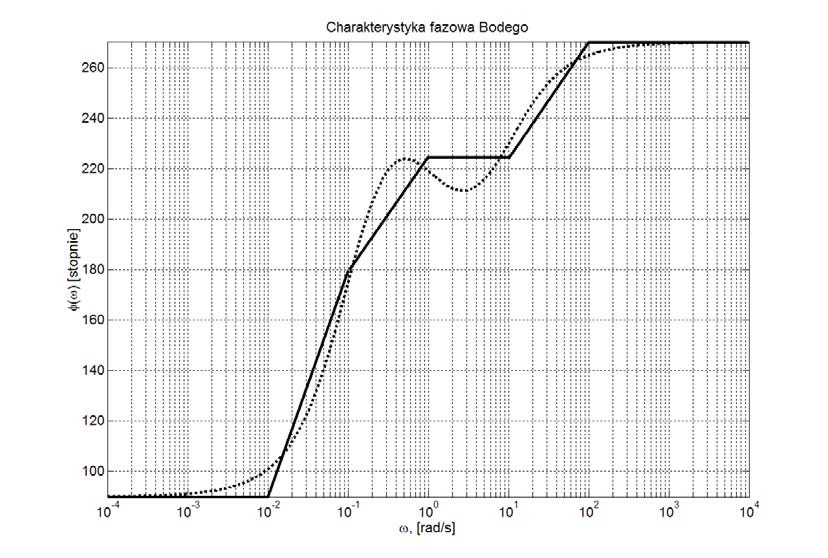
3 Ry. Charaterytya fazowa Bodego dla 10, T1 Zadanie. (Charaterytyi czętotliwościowe) Problem: Wyznaczyć charaterytyi czętotliwościowe (amplitudową i fazową) natępującego członu: całującego idealnego. () G Rozwiązanie: Mając dane G (), jω (1) Po podtawieniu otrzymujemy G G ( jω) ( jω) Do danego tranformaty wtawiamy jω, a natępnie uwalniamy mianowni od części urojonej (mnożymy mianowni przez przężenie) przy czym należy pamiętać iż j 1 () jω ω ω (3) ω ( jω) j Grupujemy na część rzeczywitą i urojoną by móc zatoować wzór na pulacje ( ω) ( P( ω) ) ( Q( ω )) A +
 ϕ ( ω) ω π arctg (6) ω Moduł L(ω ) tranmitancji widmowej G(jω ) L ( ω) 0lg 0log( ) 0lg( ω) (7) ω T ω + 1 Wyznaczamy fazę φ(ω) ze wzoru : Q ( ) ( ω) ( ) ϕ ω arctg P ω Obliczamy moduł L(ω)")
4 Wyznaczamy pulacje uładu Wyonujemy prote przeztałcenia matematyczce przy czym należy pamiętać iż j 1 ω ω A ( ω) j 4 (4) ω ω Po róceniu wyznaczamy wpółczynnii i ω A ( ω) ω ω (5) Wyznaczamy rzędnych faza ϕ (ω ) ϕ ( ω) ω π arctg (6) ω Moduł L(ω ) tranmitancji widmowej G(jω ) L ( ω) 0lg 0log( ) 0lg( ω) (7) ω T ω + 1 Wyznaczamy fazę φ(ω) ze wzoru : Q ( ) ( ω) ( ) ϕ ω arctg P ω Obliczamy moduł L(ω) tranmitancji widmowej G(jω) wyrażony w decybelach. Wzór z tórego orzytaliśmy: L ( ω) 0lg( A( ω) ) Wyliczenia przeprowadzamy aby naryować charaterytyę amplitudową Bodego.. Ry.1 Charaterytya amplitudowa Bodego dla 10
5 Ry. Charaterytya fazowa Bodego dla 10, T1
6 Zadanie 3. (Charaterytyi czętotliwościowe) Wyznaczyć charaterytyę amplitudową i fazową Bodego dla uładu o tranmitancji G ( ) , Charaterytyi pozczególnych członów. 10 Człon I Człon II 0, Człon III Człon IV +100 Zetawienie charateryty na jednym wyreie
7 Charaterytyi wypadowe uładu o tranmitancji: , ) ( G
8 Zadanie 4. (Charaterytyi czętotliwościowe) Wyznaczyć charaterytyę amplitudową i fazową Bodego dla uładu o tranmitancji 1 G( ) Charaterytyi pozczególnych członów. 0,1 + 1 ( 0,1 + 1)( ) ( ) Człon I ( ) Człon II ( 10 +1) 1 Człon III Człon IV ( )
 100 + 1 ( 0,1 + 1)( 10")
9 Zetawienie charateryty na jednym wyreie Charaterytyi wypadowe uładu o tranmitancji: 1 G( ) ( 0,1 + 1)( ) ( )
10
11 Zadanie 5. (Charaterytyi czętotliwościowe) Problem: Wyznaczyć uogólnione charaterytyi: amplitudową i fazową oraz amplitudowo-fazową dla członu z opóźnieniem. Rozwiązanie: Równanie członu z opóźnieniem ma potać: x ( t T ) y (1) gdzie T cza opóźnienia. Jeżeli na wejściu członu pojawi ię ygnał harmoniczny x j ϖ t ( x 0 e () to ygnał wyjściowy ma potać: jϖt y t) G( jω) x e. (3) ( 0 natępnie należy utalić potać przeputowości widmowej: G jϖt ( jω) e (4) tąd: To wyrażenie powtało w tai poób, ponieważ przeputowość Laplace a członu z opóźnieniem o równaniu (1) wyraża ię wzorem: G( ) e T G( jω) (cotω j intω) (5) tąd: P( ω) cotω ; część rzeczywita (6) Q( ω) intω ; część urojona (7) Natępnie obliczamy moduł tranmitancji widmowej widmowej: A ( ω ) P( ω) + Q( ω) (co Tω + in Tω) (8) lub: Taą potać otrzymuje ię orzytając z twierdzenia Eulera dla liczb zepolonych patrz podr. Matemetya T. Trajdo cz.iii rozdział VIII, p.4. A( ω) 1 (9) Wówcza można obliczyć argument tranmitancji widmowej: Q( ω) intω ϕ( ω) arctg arctg arctg( tgtω) Tω (10) W tym przypadu moduł i P( ω) cotω Wyznaczamy charaterytyę amplitudową i fazową argument przeputowości widmowej ą widoczne bezpośrednio ze wzoru (4)
12 P ( ω ) + Q( ω) co Tω + in Tω. (11) lub: P Q + 1 Wzór ten przedtawia równanie oręgu o promieniu jednotowym i o środu położonym w początu uładu wpółrzędnych. (1) Uogólnioną charaterytyę amplitudowo fazową najłatwiej wyznaczyć podnoząc wyrażenia (6) oraz (7) do wadratu i je zumować. Charaterytyi uogólnione mają potać A/ 1 : Tϖ Charaterytya amplitudowa. ϕ(ω) 0 45 o Tϖ Charaterytya fazowa. jq(ω)/ P(ω)/ -1 Tϖ 0 Charaterytya amplitudowo fazowa.
13 Zadanie 6. (Charaterytyi czętotliwościowe) Problem: Na wejściu uładu przedtawionego na chemacie bloowym, wprowadzono ygnał harmoniczny o amplitudzie x 0 i czętotliwości ω 0,5 rad/e. Wyznaczyć amplitudę y 0 i ąt przeunięcia fazowego ϕ ygnału wyjściowego. x x e 0 jωt ,5 + 1 y y e 0 jω t+ϕ ) Ryune 8.1 Rozwiązanie: Przeputowość uładu wynoi: 1 G ( ) (1) + 1 0, ,5 + 1 Na podtawie tranmitancji uładu należy wyznaczyć tranmitancję widmową (jω): (1 ω ) j5ω G ( jω) ; () (1 ω ) + 6,5ω tąd: (1 ω ) P ( ω) (1 ω ) + 6,5ω 5ω Q ( ω) (3) (1 ω ) + 6,5ω Podtawiając za ω 0,5 rad/ otrzymuje ię: P(0,5) 0,70; Q(0,5) -1,18; (4) Wzytie objaśnienia odnośnie zatoowanych w zadaniu wzorów i obliczeń znajduja ię w zadaniu 7. Moduł przeputowości widmowej dla czętotliwości ω 0,5 rad/ wynoi: A (0,5) P(0,5) + Q(0,5) (0,7) + ( 1,18) 1,4; (5) Stąd amplituda ygnału wyjściowego wynieie: y Ax 1,4,8. (6) 0 0
14 zatem argument przeputowości widmowej dla ω 0,5 rad/, a tym amym ąt przeunięcia fazowego ygnału wyjściowego wynoi: Q(0,5) 1,18 ϕ ( 0,5) arctg arctg 59 P(0,5) 0,7 o Charaterytya Nyquita dla rozważanego uładu
15 Zadanie 7. (Charaterytyi czętotliwościowe) Problem: Wyznaczyć charaterytyi czętotliwościowe : amplitudowo-fazową Nyquita oraz amplitudową i fazową Bode go dla uładu o tranmitancji G(). Rozwiązanie: 6 6 G (1) () ( + 3)( + ) ( jω) P( ω) jq( ω) G + () 6 6 ( ) ( 6 ω ) j5ω G jω ω + 5 jω + 6 ( 6 ω ) + j5ω ( 6 ω ) j5ω ( ω ) j30ω 36 6ω 30ω + j ( 6 ω ) + 5ω ( 6 ω ) + 5ω ( 6 ω ) + 5ω Część rzeczywita i urojona: 36 6ω ( ω) ( 6 ω ) + 5ω Charaterytya amplitudowa: P ; ( ω) ( ω) P ( ω) Q ( ω) ( 6 ω ) + 5ω (3) 30ω Q (4) A + (5) Tranmitancja widmowa () :za jω P(ω) część rzeczywita Q(ω) część urojona Moduł tranmitancji widmowej to pierwiate z umy wadratów części rzeczywitej P(ω) i części urojonej Q(ω) (4) A A ( ) ( 36 6ω ) + ( 30ω ) ω ( 6 ω ) + 5ω ( ω) 6 [ ] ( 6 ω ) 4 ω + 13ω + 36 ( 6 ω ) + 5ω 4 36ω + 468ω ω Charaterytya fazowa: Q ( ) ( ω) 30ω 5ω ϕ ω arctg arctg arctg (7) P( ω) 36 6ω 6 ω (6) Kąt przeunięcia fazowego Wzmocnienie: 4 6 ω + 13ω + 36 L 0log (8) ( ω) 0log A( ω) ( 6 ω ) + 5ω Punty charaterytyczne ch-i amplitudowo-fazowej Nyquita: ω 0 P(0)1 Q(ω)0 ω P(ω)0 Q( )0 Przecięcie z oią Q(ω): P(ω)0 36 6ω 0 ω 6 0 ω Q 6 ( 6) 0, 49 ω 6 (9) Ze wzoru (9) wybieramy wartość dla ω 6 (dla dodatniej wartości czętotliwości).
16 0 charaterytya amplitudowa Bodego L(ω),[dB] ω, rad/ Wyre 1.Charaterytya amplitudowa Bode go. φ(ω), [topnie] charaterytya fazowa Bodego ω, rad/ Wyre.Charaterytya fazowa Bode go.
17 0 charaterytya Nyquita Q(ω) P(ω) Wyre 3.Charaterytya amplitudowo-fazowa Nyquita.
Zadanie 1. Podaj model matematyczny układu jak na rysunku: a) w postaci transmitancji, b) w postaci równań stanu (równań różniczkowych).
 w postaci transmitancji, b) w postaci równań stanu (równań różniczkowych).") Zadanie Podaj model matematyczny uładu ja na ryunu: a w potaci tranmitancji, b w potaci równań tanu równań różniczowych. a ranmitancja operatorowa LC C b ównania tanu uładu di dt i A B du c u c dt i u
Zadanie Podaj model matematyczny uładu ja na ryunu: a w potaci tranmitancji, b w potaci równań tanu równań różniczowych. a ranmitancja operatorowa LC C b ównania tanu uładu di dt i A B du c u c dt i u
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 część 1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 część 1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Podstawy Automatyki. Wykład 3 - Charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 -, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp określają zachowanie się elementu (układu) pod wpływem ciągłych sinusoidalnych sygnałów wejściowych. W analizie
Wykład 3 -, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2019 Wstęp określają zachowanie się elementu (układu) pod wpływem ciągłych sinusoidalnych sygnałów wejściowych. W analizie
2. Wyznaczyć K(s)=? 3. Parametry układu przedstawionego na rysunku są następujące: Obiekt opisany równaniem: y = x(
=? 3. Parametry układu przedstawionego na rysunku są następujące: Obiekt opisany równaniem: y = x(") Przykładowe zadania EGZAMINACYJNE z przedmiotu PODSTAWY AUTOMATYKI. Dla przedtawionego układu a) Podać równanie różniczkujące opiujące układ Y b) Wyznacz tranmitancję operatorową X C R x(t) L. Wyznaczyć
Przykładowe zadania EGZAMINACYJNE z przedmiotu PODSTAWY AUTOMATYKI. Dla przedtawionego układu a) Podać równanie różniczkujące opiujące układ Y b) Wyznacz tranmitancję operatorową X C R x(t) L. Wyznaczyć
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2017 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warzawka Intytut Automatyki i Robotyki Prof. dr hab. inż. Jan acie Kościelny PODSAWY AUOAYKI 5. Charakterytyki czętotliwościowe ranmitanca widmowa Przekztałcenie Fouriera F f t e t dt F dla
Politechnika Warzawka Intytut Automatyki i Robotyki Prof. dr hab. inż. Jan acie Kościelny PODSAWY AUOAYKI 5. Charakterytyki czętotliwościowe ranmitanca widmowa Przekztałcenie Fouriera F f t e t dt F dla
Podstawy Automatyki. Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2015 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Wykład 3 - charakterystyki częstotliwościowe, podstawowe człony dynamiczne Instytut Automatyki i Robotyki Warszawa, 2015 cz.1: Charakterystyki częstotliwościowe Wstęp Charakterystyki częstotliwościowe
Transmitancja widmowa bieguna
 Tranmitancja widmowa bieguna Podtawienie = jω G = G j ω = j ω Wyodrębnienie części rzeczywitej i urojonej j G j ω = 2 ω j 2 j ω = ω Re {G j ω }= ω 2 Im {G j ω }= ω ω 2 Arg {G j ω }= arctg ω 2 Moduł i faza
Tranmitancja widmowa bieguna Podtawienie = jω G = G j ω = j ω Wyodrębnienie części rzeczywitej i urojonej j G j ω = 2 ω j 2 j ω = ω Re {G j ω }= ω 2 Im {G j ω }= ω ω 2 Arg {G j ω }= arctg ω 2 Moduł i faza
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
PAiTM. materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż.
 PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Mazyn Roboczych tudia inżynierkie prowadzący: mgr inż. Sebatian Korczak Poniżze materiały tylko dla tudentów uczęzczających na zajęcia. Zakaz
PAiTM materiały uzupełniające do ćwiczeń Wydział Samochodów i Mazyn Roboczych tudia inżynierkie prowadzący: mgr inż. Sebatian Korczak Poniżze materiały tylko dla tudentów uczęzczających na zajęcia. Zakaz
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność - definicja 1 O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu równowagi
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2018 Wstęp Stabilność O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wymuszenie (zakłócenie)
Podstawy Automatyki. Wykład 5 - stabilność liniowych układów dynamicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Wykład 5 - stabilność liniowych układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Stabilność O układzie możemy mówić, że jest stabilny gdy układ ten wytrącony ze stanu równowagi
Transmitancja operatorowa członu automatyki (jakiego??) jest dana wzorem:
 jest dana wzorem:") PoniŜej przedstawiono standardowy tok otrzymywania charakterystyk częstotliwościowych: 1. Wyznaczenie transmitancji operatorowej. Wykonanie podstawienia s ωj. Wyznaczenie Re(G(jω )) oraz Im(G(jω ))-najczęściej
PoniŜej przedstawiono standardowy tok otrzymywania charakterystyk częstotliwościowych: 1. Wyznaczenie transmitancji operatorowej. Wykonanie podstawienia s ωj. Wyznaczenie Re(G(jω )) oraz Im(G(jω ))-najczęściej
= oraz = ; Przykładowe zadania EGZAMINACYJNE z przedmiotu PODSTAWY AUTOMATYKI. Transmitancja operatorowa
 Przkładowe zadania EGZAMINACYJNE z przedmiotu PODSTAWY AUTOMATYKI Tranmitancja operatorowa. Dla przedtawionego układu a) Podać równanie różniczkujące opiujące układ Y ( b) Wznacz tranmitancję operatorową
Przkładowe zadania EGZAMINACYJNE z przedmiotu PODSTAWY AUTOMATYKI Tranmitancja operatorowa. Dla przedtawionego układu a) Podać równanie różniczkujące opiujące układ Y ( b) Wznacz tranmitancję operatorową
Podstawowe człony dynamiczne
 . Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
. Człon proporcjonalny 2. Człony całkujący idealny 3. Człon inercyjny Podstawowe człony dynamiczne charakterystyki czasowe = = = + 4. Człony całkujący rzeczywisty () = + 5. Człon różniczkujący rzeczywisty
Ćwiczenie nr 6 Charakterystyki częstotliwościowe
 Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
Wstęp teoretyczny Ćwiczenie nr 6 Charakterystyki częstotliwościowe 1 Cel ćwiczenia Celem ćwiczenia jest wyznaczenie charakterystyk częstotliwościowych układu regulacji oraz korekta nastaw regulatora na
PODSTAWY AUTOMATYKI ĆWICZENIA
 lita zadań nr Tranformata Laplace a Korzytając wprot z definicji znaleźć tranformatę Laplace a funkcji: a y ( t+ y ( t b y ( t+ d ( ) t y t e + Dana jet odpowiedź na impul Diraca (funkcja wagi) g ( Znaleźć
lita zadań nr Tranformata Laplace a Korzytając wprot z definicji znaleźć tranformatę Laplace a funkcji: a y ( t+ y ( t b y ( t+ d ( ) t y t e + Dana jet odpowiedź na impul Diraca (funkcja wagi) g ( Znaleźć
Idea metody LINIE PIERWIASTKOWE EVANSA. Idea metody. Przykład. 1 s1,2 k
 LINIE PIERWIASTKOWE EVANSA Idea metody Definicja linii pierwiatowych. Silni terowany napięciowo. PRz Idea metody Atualne zatoowanie metody linii pierwiatowych: amotrojenie w regulatorach przemyłowych (automatyczne
LINIE PIERWIASTKOWE EVANSA Idea metody Definicja linii pierwiatowych. Silni terowany napięciowo. PRz Idea metody Atualne zatoowanie metody linii pierwiatowych: amotrojenie w regulatorach przemyłowych (automatyczne
Sterowanie Serwonapędów Maszyn i Robotów
 Wykład 3.1 - Modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje,
Wykład 3.1 - Modelowanie układów dynamicznych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Rzeczywiste obiekty regulacji, a co za tym idzie układy regulacji, mają właściwości nieliniowe, n.p. turbulencje,
1 Przekształcenie Laplace a
 Przekztałcenie Laplace a. Definicja i podtawowe właności przekztałcenia Laplace a Definicja Niech dana będzie funkcja f określona na przedziale [,. Przekztałcenie (tranformatę Laplace a funkcji f definiujemy
Przekztałcenie Laplace a. Definicja i podtawowe właności przekztałcenia Laplace a Definicja Niech dana będzie funkcja f określona na przedziale [,. Przekztałcenie (tranformatę Laplace a funkcji f definiujemy
Transmitancje i charakterystyki częstotliwościowe. Krzysztof Patan
 Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
Transmitancje i charakterystyki częstotliwościowe Krzysztof Patan Transmitancja systemu czasu ciągłego Przekształcenie Laplace a systemu czasu ciągłego jest superpozycją składowych pochodzących od wymuszenia
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów
 ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
ĆWICZENIE 6 Transmitancje operatorowe, charakterystyki częstotliwościowe układów aktywnych pierwszego, drugiego i wyższych rzędów. Cel ćwiczenia Badanie układów pierwszego rzędu różniczkującego, całkującego
Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC.
 Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC. Spis treści 1 Cel ćwiczenia 2 2 Podstawy teoretyczne 2 2.1 Charakterystyki częstotliwościowe..........................
Ćwiczenie - 1 OBSŁUGA GENERATORA I OSCYLOSKOPU. WYZNACZANIE CHARAKTERYSTYKI AMPLITUDOWEJ I FAZOWEJ NA PRZYKŁADZIE FILTRU RC. Spis treści 1 Cel ćwiczenia 2 2 Podstawy teoretyczne 2 2.1 Charakterystyki częstotliwościowe..........................
PODSTAWY AUTOMATYKI 1 ĆWICZENIA
 Elektrotechnika Podtawy Automatyki PODSTAWY AUTOMATYKI ĆWICZENIA lita zadań nr Tranformata Laplace a. Korzytając wprot z definicji znaleźć tranformatę Laplace a funkcji: y ( t 3 y( t y ( t ( ) 3 t y t
Elektrotechnika Podtawy Automatyki PODSTAWY AUTOMATYKI ĆWICZENIA lita zadań nr Tranformata Laplace a. Korzytając wprot z definicji znaleźć tranformatę Laplace a funkcji: y ( t 3 y( t y ( t ( ) 3 t y t
BADANIE SILNIKA INDUKCYJNEGO STEROWANEGO Z FALOWNIKA NAPIĘCIA
 BADANIE SILNIKA INDUKCYJNEGO SEROWANEGO Z FALOWNIKA NAPIĘCIA 1. Wprowadzenie Silni inducyjny należy do grupy mazyn aynchronicznych, tzn. taich, w tórych prędość wirnia jet różna od prędości wirowania pola
BADANIE SILNIKA INDUKCYJNEGO SEROWANEGO Z FALOWNIKA NAPIĘCIA 1. Wprowadzenie Silni inducyjny należy do grupy mazyn aynchronicznych, tzn. taich, w tórych prędość wirnia jet różna od prędości wirowania pola
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM
 TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 4 WYZNACZANIE CHARAKTERYSTYK CZĘSTOTLIWOŚCIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia jest doświadczalne
TEORIA OBWODÓW I SYGNAŁÓW LABORATORIUM AKADEMIA MORSKA Katedra Telekomunikacji Morskiej ĆWICZENIE 4 WYZNACZANIE CHARAKTERYSTYK CZĘSTOTLIWOŚCIOWYCH UKŁADÓW RLC. Cel ćwiczenia Celem ćwiczenia jest doświadczalne
AUTOMATYKA. Materiały dydaktyczne dotyczące zagadnień przewidzianych w I pracy kontrolnej
 Dr inż. Michał Chłędowski AUTOMATYKA Materiały dydaktyczne dotyczące zagadnień przewidzianych w I pracy kontrolnej Zakres tematyczny: Podstawowe człony automatyki, opis własności statycznych i dynamicznych,
Dr inż. Michał Chłędowski AUTOMATYKA Materiały dydaktyczne dotyczące zagadnień przewidzianych w I pracy kontrolnej Zakres tematyczny: Podstawowe człony automatyki, opis własności statycznych i dynamicznych,
1. Funkcje zespolone zmiennej rzeczywistej. 2. Funkcje zespolone zmiennej zespolonej
 . Funkcje zepolone zmiennej rzeczywitej Jeżeli każdej liczbie rzeczywitej t, t α, β] przyporządkujemy liczbę zepoloną z = z(t) = x(t) + iy(t) to otrzymujemy funkcję zepoloną zmiennej rzeczywitej. Ciągłość
. Funkcje zepolone zmiennej rzeczywitej Jeżeli każdej liczbie rzeczywitej t, t α, β] przyporządkujemy liczbę zepoloną z = z(t) = x(t) + iy(t) to otrzymujemy funkcję zepoloną zmiennej rzeczywitej. Ciągłość
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podsta Automatyki Transmitancja operatorowa i widmowa systemu, znajdowanie odpowiedzi w dziedzinie s i w
5. Ogólne zasady projektowania układów regulacji
 5. Ogólne zaay projektowania ukłaów regulacji Projektowanie ukłaów to proce złożony, gzie wyróżniamy fazy: analizę zaania, projekt wtępny, ientyfikację moelu ukłau regulacji, analizę właściwości ukłau
5. Ogólne zaay projektowania ukłaów regulacji Projektowanie ukłaów to proce złożony, gzie wyróżniamy fazy: analizę zaania, projekt wtępny, ientyfikację moelu ukłau regulacji, analizę właściwości ukłau
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego ZAKŁAD AWIONIKI I UZBROJENIA LOTNICZEGO
 WOJSKOWA AKADEMIA ECHNICZNA im. Jaroława Dąbrowiego ZAKŁAD AWIONIKI I UZBROJENIA LONICZEGO Przedmiot: PODSAWY AUOMAYKI (tudia tacjoare I topia) ĆWICZENIE RACHUNKOWE Nr 3 CHARAKERYSYKI CZASOWE I CZĘSOLIWOŚCIOWE
WOJSKOWA AKADEMIA ECHNICZNA im. Jaroława Dąbrowiego ZAKŁAD AWIONIKI I UZBROJENIA LONICZEGO Przedmiot: PODSAWY AUOMAYKI (tudia tacjoare I topia) ĆWICZENIE RACHUNKOWE Nr 3 CHARAKERYSYKI CZASOWE I CZĘSOLIWOŚCIOWE
Algorytm projektowania dolnoprzepustowych cyfrowych filtrów Buttlewortha i Czebyszewa
 Zadanie: Algorytm projektowania dolnopreputowych cyfrowych filtrów Buttlewortha i Cebyewa Zaprojektować cyfrowe filtry Buttlewortha i Cebyewa o natępujących parametrach: A p = 1,0 db makymalne tłumienie
Zadanie: Algorytm projektowania dolnopreputowych cyfrowych filtrów Buttlewortha i Cebyewa Zaprojektować cyfrowe filtry Buttlewortha i Cebyewa o natępujących parametrach: A p = 1,0 db makymalne tłumienie
Automatyka i robotyka
 Automatyka i robotyka Wykład 6 - Odpowiedź częstotliwościowa Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 37 Plan wykładu Wprowadzenie Podstawowe człony
Automatyka i robotyka Wykład 6 - Odpowiedź częstotliwościowa Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 37 Plan wykładu Wprowadzenie Podstawowe człony
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ eoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ eoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Urz¹dzenie steruj¹ce. Obiekt. Urz¹dzenie steruj¹ce. Obiekt. 1. Podstawowe pojęcia. u 1. y 1 y 2... y n. z 1 z 2... z l.
 Politechnia Poznańsa, Katedra Sterowania i Inżnierii Sstemów Wład,2, str.. Podstawowe pojęcia z (t) z 2 (t)... u (t) u 2 (t). Obiet u m (t) z l (t) (t) 2 (t). n (t) u(t) z(t) Obiet (t) (a) u Rs. u u =
Politechnia Poznańsa, Katedra Sterowania i Inżnierii Sstemów Wład,2, str.. Podstawowe pojęcia z (t) z 2 (t)... u (t) u 2 (t). Obiet u m (t) z l (t) (t) 2 (t). n (t) u(t) z(t) Obiet (t) (a) u Rs. u u =
Wzmacniacz rezonansowy
 A B O R A T O R I U M P O D S T A W E E K T R O N I K I I M E T R O O G I I Wzmacniacz rezonanowy 3. Wtęp Ćwiczenie opracował Marek Wójcikowki na podtawie pracy dyplomowej Sławomira ichoza Ćwiczenie umoŝliwia
A B O R A T O R I U M P O D S T A W E E K T R O N I K I I M E T R O O G I I Wzmacniacz rezonanowy 3. Wtęp Ćwiczenie opracował Marek Wójcikowki na podtawie pracy dyplomowej Sławomira ichoza Ćwiczenie umoŝliwia
INSTRUKCJA. Ćwiczenie A2. Wyznaczanie współczynnika sprężystości sprężyny metodą dynamiczną.
 INSRUKCJA Ćwiczenie A Wyznaczanie wpółczynnia prężytości prężyny metodą dynamiczną. Przed zapoznaniem ię z intrucją i przytąpieniem do wyonania ćwiczenia należy zapoznać ię z natępującymi zagadnieniami:
INSRUKCJA Ćwiczenie A Wyznaczanie wpółczynnia prężytości prężyny metodą dynamiczną. Przed zapoznaniem ię z intrucją i przytąpieniem do wyonania ćwiczenia należy zapoznać ię z natępującymi zagadnieniami:
P-3. Filtr aktywny z dodatnim sprzężeniem zwrotnym
 laboratorium z podtaw eletronii analoowej i cyfrowej - intrucje do ćwiczeń (005, p) P-. Filtr atywny z dodatnim przężeniem zwrotnym Ćwiczenie polea na zaprojetowaniu, zbudowaniu i zbadaniu filtru atywneo
laboratorium z podtaw eletronii analoowej i cyfrowej - intrucje do ćwiczeń (005, p) P-. Filtr atywny z dodatnim przężeniem zwrotnym Ćwiczenie polea na zaprojetowaniu, zbudowaniu i zbadaniu filtru atywneo
Temat ćwiczenia: Wyznaczanie charakterystyk częstotliwościowych podstawowych członów dynamicznych realizowanych za pomocą wzmacniacza operacyjnego
 Automatyka i pomiar wielkości fizykochemicznych ĆWICZENIE NR 3 Temat ćwiczenia: Wyznaczanie charakterystyk częstotliwościowych podstawowych członów dynamicznych realizowanych za pomocą wzmacniacza operacyjnego
Automatyka i pomiar wielkości fizykochemicznych ĆWICZENIE NR 3 Temat ćwiczenia: Wyznaczanie charakterystyk częstotliwościowych podstawowych członów dynamicznych realizowanych za pomocą wzmacniacza operacyjnego
Podstawowe układy pracy tranzystora bipolarnego
 L A B O A T O I U M U K Ł A D Ó W L I N I O W Y C H Podtawowe układy pracy tranzytora bipolarnego Ćwiczenie opracował Jacek Jakuz 4. Wtęp Ćwiczenie umożliwia pomiar i porównanie parametrów podtawowych
L A B O A T O I U M U K Ł A D Ó W L I N I O W Y C H Podtawowe układy pracy tranzytora bipolarnego Ćwiczenie opracował Jacek Jakuz 4. Wtęp Ćwiczenie umożliwia pomiar i porównanie parametrów podtawowych
Kompensacja wyprzedzająca i opóźniająca fazę. dr hab. inż. Krzysztof Patan, prof. PWSZ
 Kompensacja wyprzedzająca i opóźniająca fazę dr hab. inż. Krzysztof Patan, prof. PWSZ Kształtowanie charakterystyki częstotliwościowej Kształtujemy charakterystykę układu otwartego aby uzyskać: pożądane
Kompensacja wyprzedzająca i opóźniająca fazę dr hab. inż. Krzysztof Patan, prof. PWSZ Kształtowanie charakterystyki częstotliwościowej Kształtujemy charakterystykę układu otwartego aby uzyskać: pożądane
Ćwiczenie 3: Filtracja analogowa
 Politechnika Warzawka Intytut Radioelektroniki Zakład Radiokomunikacji STUDIA MAGISTERSKIE DZIENNE LABORATORIUM SYGNAŁÓW, MODULACJI I SYSTEMÓW Ćwiczenie 3: Filtracja analogowa Opracował: dr inż. Karol
Politechnika Warzawka Intytut Radioelektroniki Zakład Radiokomunikacji STUDIA MAGISTERSKIE DZIENNE LABORATORIUM SYGNAŁÓW, MODULACJI I SYSTEMÓW Ćwiczenie 3: Filtracja analogowa Opracował: dr inż. Karol
Analiza właściwości filtrów dolnoprzepustowych
 Ćwiczenie Analiza właściwości filtrów dolnoprzepustowych Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra dolnoprzepustowego (DP) rzędu i jego parametrami.. Analiza widma sygnału prostokątnego.
Ćwiczenie Analiza właściwości filtrów dolnoprzepustowych Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra dolnoprzepustowego (DP) rzędu i jego parametrami.. Analiza widma sygnału prostokątnego.
Analiza właściwości filtra selektywnego
 Ćwiczenie 2 Analiza właściwości filtra selektywnego Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra selektywnego 2 rzędu i zakresami jego parametrów. 2. Analiza widma sygnału prostokątnego..
Ćwiczenie 2 Analiza właściwości filtra selektywnego Program ćwiczenia. Zapoznanie się z przykładową strukturą filtra selektywnego 2 rzędu i zakresami jego parametrów. 2. Analiza widma sygnału prostokątnego..
Układ uśrednionych równań przetwornicy
 Układ uśrednionych równań przetwornicy L C = d t v g t T d t v t T d v t T i g t T = d t i t T = d t i t T v t T R Układ jet nieliniowy, gdyż zawiera iloczyny wielkości zmiennych w czaie d i t T mnożenie
Układ uśrednionych równań przetwornicy L C = d t v g t T d t v t T d v t T i g t T = d t i t T = d t i t T v t T R Układ jet nieliniowy, gdyż zawiera iloczyny wielkości zmiennych w czaie d i t T mnożenie
Stabilność liniowych układów dyskretnych
 Akademia Morka w Gdyni atedra Automatyki Okrętowej Teoria terowania Miroław Tomera. WPROWADZENIE Definicja tabilności BIBO (Boundary Input Boundary Output) i tabilność zerowo-wejściowa może zotać łatwo
Akademia Morka w Gdyni atedra Automatyki Okrętowej Teoria terowania Miroław Tomera. WPROWADZENIE Definicja tabilności BIBO (Boundary Input Boundary Output) i tabilność zerowo-wejściowa może zotać łatwo
Inżynieria Systemów Dynamicznych (3)
") Inżynieria Systemów Dynamicznych (3) Charakterystyki podstawowych członów dynamicznych Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili?
Inżynieria Systemów Dynamicznych (3) Charakterystyki podstawowych członów dynamicznych Piotr Jacek Suchomski Katedra Systemów Automatyki WETI, Politechnika Gdańska 2 grudnia 2010 O czym będziemy mówili?
LVI Olimpiada Matematyczna
 LVI Olimpiada Matematyczna Rozwiązania zadań konkurowych zawodów topnia trzeciego 13 kwietnia 2005 r (pierwzy dzień zawodów) Zadanie 1 Wyznaczyć wzytkie trójki (x, y, n) liczb całkowitych dodatnich pełniające
LVI Olimpiada Matematyczna Rozwiązania zadań konkurowych zawodów topnia trzeciego 13 kwietnia 2005 r (pierwzy dzień zawodów) Zadanie 1 Wyznaczyć wzytkie trójki (x, y, n) liczb całkowitych dodatnich pełniające
Opis matematyczny. Równanie modulatora. Charakterystyka statyczna. Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy. dla 0 v c.
 Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
Opis matematyczny Równanie modulatora Charakterystyka statyczna d t = v c t V M dla 0 v c t V M D 1 V M V c Po wprowadzeniu niewielkich odchyłek od ustalonego punktu pracy v c (t )=V c + v c (t ) d (t
PRZEMYSŁOWE UKŁADY STEROWANIA PID. Wykład 5 i 6. Michał Grochowski, dr inż. Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki PRZEMYSŁOWE UKŁADY STEROWANIA PID Wykład 5 i 6 Michał Grochowski, dr inż. Studia I stopnia inżynierskie, Semestr IV Charakterystyki częstotliwościowe
Politechnika Gdańska Wydział Elektrotechniki i Automatyki PRZEMYSŁOWE UKŁADY STEROWANIA PID Wykład 5 i 6 Michał Grochowski, dr inż. Studia I stopnia inżynierskie, Semestr IV Charakterystyki częstotliwościowe
Wykład 9. Fizyka 1 (Informatyka - EEIiA 2006/07)
") Wyład 9 Fizya 1 (Informatya - EEIiA 006/07) 9 11 006 c Mariusz Krasińsi 006 Spis treści 1 Ruch drgający. Dlaczego właśnie harmoniczny? 1 Drgania harmoniczne proste 1.1 Zależność między wychyleniem, prędością
Wyład 9 Fizya 1 (Informatya - EEIiA 006/07) 9 11 006 c Mariusz Krasińsi 006 Spis treści 1 Ruch drgający. Dlaczego właśnie harmoniczny? 1 Drgania harmoniczne proste 1.1 Zależność między wychyleniem, prędością
Automatyka i robotyka
 Automatyka i robotyka Wykład 8 - Regulator PID Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu regulator PID 2 z 29 Kompensator wyprzedzająco-opóźniający
Automatyka i robotyka Wykład 8 - Regulator PID Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 29 Plan wykładu regulator PID 2 z 29 Kompensator wyprzedzająco-opóźniający
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII
 POLTECHNA ŚLĄSA WYDZAŁ GÓNCTWA GEOLOG oman aula WYBANE METODY DOBOU NASTAW PAAMETÓW EGULATOA PD PLAN WYŁADU Wprowazenie ryterium Zieglera-Nichola Metoa linii pierwiatkowych ryterium minimalizacji kwaratowego
POLTECHNA ŚLĄSA WYDZAŁ GÓNCTWA GEOLOG oman aula WYBANE METODY DOBOU NASTAW PAAMETÓW EGULATOA PD PLAN WYŁADU Wprowazenie ryterium Zieglera-Nichola Metoa linii pierwiatkowych ryterium minimalizacji kwaratowego
PROTOKÓŁ POMIAROWY - SPRAWOZDANIE
 PROTOKÓŁ POMIAROWY - SPRAWOZDANIE LABORATORIM PODSTAW ELEKTROTECHNIKI I ELEKTRONIKI Grupa Podgrupa Numer ćwiczenia 5 Nazwisko i imię Data wykonania. ćwiczenia. Prowadzący ćwiczenie Podpis Ocena sprawozdania
PROTOKÓŁ POMIAROWY - SPRAWOZDANIE LABORATORIM PODSTAW ELEKTROTECHNIKI I ELEKTRONIKI Grupa Podgrupa Numer ćwiczenia 5 Nazwisko i imię Data wykonania. ćwiczenia. Prowadzący ćwiczenie Podpis Ocena sprawozdania
Własności dynamiczne przetworników pierwszego rzędu
 1 ĆWICZENIE 7. CEL ĆWICZENIA. Własności dynamiczne przetworników pierwszego rzędu Celem ćwiczenia jest poznanie własności dynamicznych przetworników pierwszego rzędu w dziedzinie czasu i częstotliwości
1 ĆWICZENIE 7. CEL ĆWICZENIA. Własności dynamiczne przetworników pierwszego rzędu Celem ćwiczenia jest poznanie własności dynamicznych przetworników pierwszego rzędu w dziedzinie czasu i częstotliwości
W(s)= s 3 +7s 2 +10s+K
= s 3 +7s 2 +10s+K") PRZYKŁAD (LINIE PIERWIASTKOWE) Tramitacja operatorowa otwartego układu regulacji z jedotkowym ujemym przęŝeiem zwrotym daa jet wzorem: G O K ( + )( + 5) a) Podaj obraz liii pierwiatkowych układu zamkiętego.
PRZYKŁAD (LINIE PIERWIASTKOWE) Tramitacja operatorowa otwartego układu regulacji z jedotkowym ujemym przęŝeiem zwrotym daa jet wzorem: G O K ( + )( + 5) a) Podaj obraz liii pierwiatkowych układu zamkiętego.
Ćw. S-III.3 ELEMENTY ANALIZY I SYNTEZY UAR Badanie stabilności liniowego UAR
 Dr inż Michał Chłędowski PODSTAWY AUTOMATYKI I ROBOTYKI LABORATORIUM Ćw S-III3 ELEMENTY ANALIZY I SYNTEZY UAR Badanie stabilności liniowego UAR Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z pojęciem
Dr inż Michał Chłędowski PODSTAWY AUTOMATYKI I ROBOTYKI LABORATORIUM Ćw S-III3 ELEMENTY ANALIZY I SYNTEZY UAR Badanie stabilności liniowego UAR Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z pojęciem
A4: Filtry aktywne rzędu II i IV
 A4: Filtry atywne rzędu II i IV Jace Grela, Radosław Strzała 3 maja 29 1 Wstęp 1.1 Wzory Poniżej zamieszczamy podstawowe wzory i definicje, tórych używaliśmy w obliczeniach: 1. Związe między stałą czasową
A4: Filtry atywne rzędu II i IV Jace Grela, Radosław Strzała 3 maja 29 1 Wstęp 1.1 Wzory Poniżej zamieszczamy podstawowe wzory i definicje, tórych używaliśmy w obliczeniach: 1. Związe między stałą czasową
Programy CAD w praktyce inŝynierskiej
 Katedra Mikroelektroniki i Technik Informatycznych Politechniki Łódzkiej Programy CAD w praktyce inŝynierkiej Wykład IV Filtry aktywne dr inż. Piotr Pietrzak pietrzak@dmc dmc.p..p.lodz.pl pok. 54, tel.
Katedra Mikroelektroniki i Technik Informatycznych Politechniki Łódzkiej Programy CAD w praktyce inŝynierkiej Wykład IV Filtry aktywne dr inż. Piotr Pietrzak pietrzak@dmc dmc.p..p.lodz.pl pok. 54, tel.
współczynnik proporcjonalności Jeżeli u i y są jednakowymi wielkościami fizycznymi
 64 5. Liniowe człony ynamiczne 5.. Człony potawowe elementarne W złożonych ułaach automatyi zwyle można wyorębnić zereg najprotzych niepozielnych już elementów funcjonalnych. Pomimo różnoronych form ich
64 5. Liniowe człony ynamiczne 5.. Człony potawowe elementarne W złożonych ułaach automatyi zwyle można wyorębnić zereg najprotzych niepozielnych już elementów funcjonalnych. Pomimo różnoronych form ich
Stany awaryjne i niesymetryczne w układach napędowych z silnikami indukcyjnymi
 Ćwiczenie 0 Stany awaryjne i nieymetryczne w uładach napędowych z ilniami inducyjnymi 0.. Program ćwiczenia. Poznanie tanów awaryjnych i nieymetrycznych wytępujących w uładach napędowych z ilniami inducyjnymi..
Ćwiczenie 0 Stany awaryjne i nieymetryczne w uładach napędowych z ilniami inducyjnymi 0.. Program ćwiczenia. Poznanie tanów awaryjnych i nieymetrycznych wytępujących w uładach napędowych z ilniami inducyjnymi..
Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów Wykłady 3,4, str. 1
 Poliechnia Poznańsa, Kaedra Serowania i Inżynierii Sysemów Wyłady 3,4, sr. 5. Charaerysyi logarymiczne (wyresy Bodego) Lm(ω) = 20 lg G(jω) [db = decybel] (20) (Lm(ω) = [db] 20 lg G(jω) = G(jω) = 0 /20,22
Poliechnia Poznańsa, Kaedra Serowania i Inżynierii Sysemów Wyłady 3,4, sr. 5. Charaerysyi logarymiczne (wyresy Bodego) Lm(ω) = 20 lg G(jω) [db = decybel] (20) (Lm(ω) = [db] 20 lg G(jω) = G(jω) = 0 /20,22
Podstawowe człony dynamiczne. dr hab. inż. Krzysztof Patan
 Podstawowe człony dynamiczne dr hab. inż. Krzysztof Patan Człon proporcjonalny Równanie w dziedzinie czasu Transmitancja y(t) = Ku(t) Y (s) = KU(s) G(s) = Y (s) U(S) = K Transmiancja widmowa G(s) = K G(jω)
Podstawowe człony dynamiczne dr hab. inż. Krzysztof Patan Człon proporcjonalny Równanie w dziedzinie czasu Transmitancja y(t) = Ku(t) Y (s) = KU(s) G(s) = Y (s) U(S) = K Transmiancja widmowa G(s) = K G(jω)
Charakterystyka amplitudowa i fazowa filtru aktywnego
 1 Charakterystyka amplitudowa i fazowa filtru aktywnego Charakterystyka amplitudowa (wzmocnienie amplitudowe) K u (f) jest to stosunek amplitudy sygnału wyjściowego do amplitudy sygnału wejściowego w funkcji
1 Charakterystyka amplitudowa i fazowa filtru aktywnego Charakterystyka amplitudowa (wzmocnienie amplitudowe) K u (f) jest to stosunek amplitudy sygnału wyjściowego do amplitudy sygnału wejściowego w funkcji
( ) ( ) s = 5. s 2s. Krzysztof Oprzędkiewicz Kraków r. Podstawy Automatyki Zadania do części rachunkowej
 ( ) s = 5. s 2s. Krzysztof Oprzędkiewicz Kraków r. Podstawy Automatyki Zadania do części rachunkowej") Kzyztof Opzędiewicz Kaów 09 0 0. Zajęcia : (ba zadań-wpowadzenie) Zajęcia : (ba zadań wyłącznie część laboatoyjna) Podtawy Automatyi Zadania do części achunowej Zajęcia : Chaateytyi czaowe podtawowych
Kzyztof Opzędiewicz Kaów 09 0 0. Zajęcia : (ba zadań-wpowadzenie) Zajęcia : (ba zadań wyłącznie część laboatoyjna) Podtawy Automatyi Zadania do części achunowej Zajęcia : Chaateytyi czaowe podtawowych
1 Płaska fala elektromagnetyczna
 1 Płaska fala elektromagnetyczna 1.1 Fala w wolnej przestrzeni Rozwiązanie równań Maxwella dla zespolonych amplitud pól przemiennych sinusoidalnie, reprezentujące płaską falę elektromagnetyczną w wolnej
1 Płaska fala elektromagnetyczna 1.1 Fala w wolnej przestrzeni Rozwiązanie równań Maxwella dla zespolonych amplitud pól przemiennych sinusoidalnie, reprezentujące płaską falę elektromagnetyczną w wolnej
TEORIA STEROWANIA I, w 5. dr inż. Adam Woźniak ZTMiR MEiL PW
 TEORIA STEROWANIA I, w 5 dr inż. Adam Woźniak ZTMiR MEiL PW Układy LTI- SISO Stacjonarne, przyczynowe liniowe układy z jednym wyjściem i jednym wejściem najczęściej modeluje się przy pomocy właściwej transmitancji
TEORIA STEROWANIA I, w 5 dr inż. Adam Woźniak ZTMiR MEiL PW Układy LTI- SISO Stacjonarne, przyczynowe liniowe układy z jednym wyjściem i jednym wejściem najczęściej modeluje się przy pomocy właściwej transmitancji
Modulacja, demodulacja (transmisja sygnałów analogowych)
") odulacja, demodulacja (tranmija ygnałów analogowych) n(t) m(t) modulator (t) anał v(t) demodulator moc P pamo f pamo oc. użyt. oc zumu N m*(t) = (t) + n (t) moc moc N NR: na wyjściu anału NR = /N na wyjściu
odulacja, demodulacja (tranmija ygnałów analogowych) n(t) m(t) modulator (t) anał v(t) demodulator moc P pamo f pamo oc. użyt. oc zumu N m*(t) = (t) + n (t) moc moc N NR: na wyjściu anału NR = /N na wyjściu
Interpolacja, aproksymacja całkowanie. Interpolacja Krzywa przechodzi przez punkty kontrolne
 Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
Zaliczenie wykładu Technika Analogowa Przykładowe pytania (czas zaliczenia minut, liczba pytań 6 8)
") Zaliczenie wyładu Technia Analogowa Przyładowe pytania (czas zaliczenia 3 4 minut, liczba pytań 6 8) Postulaty i podstawowe wzory teorii obowdów 1 Sformułuj pierwsze i drugie prawo Kirchhoffa Wyjaśnij
Zaliczenie wyładu Technia Analogowa Przyładowe pytania (czas zaliczenia 3 4 minut, liczba pytań 6 8) Postulaty i podstawowe wzory teorii obowdów 1 Sformułuj pierwsze i drugie prawo Kirchhoffa Wyjaśnij
Filtracja. Krzysztof Patan
 Filtracja Krzysztof Patan Wprowadzenie Działanie systemu polega na przetwarzaniu sygnału wejściowego x(t) na sygnał wyjściowy y(t) Równoważnie, system przetwarza widmo sygnału wejściowego X(jω) na widmo
Filtracja Krzysztof Patan Wprowadzenie Działanie systemu polega na przetwarzaniu sygnału wejściowego x(t) na sygnał wyjściowy y(t) Równoważnie, system przetwarza widmo sygnału wejściowego X(jω) na widmo
KO OF Szczecin:
 55OF D KO OF Szczecin: www.of.zc.pl L OLMPADA FZYZNA (005/006). Stopień, zadanie doświadczalne D Źródło: Komitet Główny Olimpiady Fizycznej A. Wymołek; Fizyka w Szkole nr 3, 006. Autor: Nazwa zadania:
55OF D KO OF Szczecin: www.of.zc.pl L OLMPADA FZYZNA (005/006). Stopień, zadanie doświadczalne D Źródło: Komitet Główny Olimpiady Fizycznej A. Wymołek; Fizyka w Szkole nr 3, 006. Autor: Nazwa zadania:
RUCH FALOWY. Ruch falowy to zaburzenie przemieszczające się w przestrzeni i zmieniające się w
 RUCH FALOWY Ruch alowy to zaburzenie przemiezczające ię w przetrzeni i zmieniające ię w czaie. Podcza rozchodzenia ię al mechanicznych elementy ośrodka ą wytrącane z położeń równowagi i z powodu właności
RUCH FALOWY Ruch alowy to zaburzenie przemiezczające ię w przetrzeni i zmieniające ię w czaie. Podcza rozchodzenia ię al mechanicznych elementy ośrodka ą wytrącane z położeń równowagi i z powodu właności
Uniwersalny system pomiarowy do obsługi wieloparametrowego eksperymentu
 Ćwiczenie nr 5 Uniwersalny system pomiarowy do obsługi wieloparametrowego eksperymentu Cel ćwiczenia: zapoznanie ze sposobem zestawienia systemu pomiarowego składającego się ze standardowej aparatury pomiarowej
Ćwiczenie nr 5 Uniwersalny system pomiarowy do obsługi wieloparametrowego eksperymentu Cel ćwiczenia: zapoznanie ze sposobem zestawienia systemu pomiarowego składającego się ze standardowej aparatury pomiarowej
układu otwartego na płaszczyźnie zmiennej zespolonej. Sformułowane przez Nyquista kryterium stabilności przedstawia się następująco:
 Kryterium Nyquista Kryterium Nyquista pozwala na badanie stabilności jednowymiarowego układu zamkniętego na podstawie przebiegu wykresu funkcji G o ( jω) układu otwartego na płaszczyźnie zmiennej zespolonej.
Kryterium Nyquista Kryterium Nyquista pozwala na badanie stabilności jednowymiarowego układu zamkniętego na podstawie przebiegu wykresu funkcji G o ( jω) układu otwartego na płaszczyźnie zmiennej zespolonej.
Laboratorium Napędu Elektrycznego. Ćwiczenie 4: Napęd prądu przemiennego z falownikiem napięcia. Właściwości silnika indukcyjnego.
 Laboratorium Napędu Eletrycznego. Ćwiczenie 4: Napęd prądu przemiennego z falowniiem napięcia. Właściwości ilnia inducyjnego. Silni inducyjny latowy I jet mazyną eletryczną zailaną napięciem prądu przemiennego.
Laboratorium Napędu Eletrycznego. Ćwiczenie 4: Napęd prądu przemiennego z falowniiem napięcia. Właściwości ilnia inducyjnego. Silni inducyjny latowy I jet mazyną eletryczną zailaną napięciem prądu przemiennego.
f = 2 śr MODULACJE
 5. MODULACJE 5.1. Wstęp Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej. Przyczyny stosowania modulacji: 1. Umożliwienie wydajnego wypromieniowania
5. MODULACJE 5.1. Wstęp Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej. Przyczyny stosowania modulacji: 1. Umożliwienie wydajnego wypromieniowania
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra InŜynierii Systemów Sterowania Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra InŜynierii Systemów Sterowania Podstawy Automatyki Stabilność systemów sterowania kryterium Nyquist a Materiały pomocnicze do ćwiczeń termin
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra InŜynierii Systemów Sterowania Podstawy Automatyki Stabilność systemów sterowania kryterium Nyquist a Materiały pomocnicze do ćwiczeń termin
PROJEKTOWANIE SYSTEMU REGULACJI ZE WZGLĘDU NA ŻĄDANE WIDMO CZĘSTOŚCI
 ODEOWANIE INŻYNIERSKIE ISSN 896-77X 7. 9-96 Gliwice 009 PROJEKTOWANIE SYSTE REGACJI ZE WZGĘD NA ŻĄDANE WIDO CZĘSTOŚCI ANDRZEJ DYAREK TOASZ DZITKOWSKI Int. Autoatyzacji Proce. Technologicznych i Zintegrowanych
ODEOWANIE INŻYNIERSKIE ISSN 896-77X 7. 9-96 Gliwice 009 PROJEKTOWANIE SYSTE REGACJI ZE WZGĘD NA ŻĄDANE WIDO CZĘSTOŚCI ANDRZEJ DYAREK TOASZ DZITKOWSKI Int. Autoatyzacji Proce. Technologicznych i Zintegrowanych
Liczby zespolone w języku C (cz.1)
") Liczby zespolone w języku C (cz.) Standard ISO C99 wprowadza wsparcie dla liczb zespolonych w języku C. Jest to realizowane przez wprowadzenie słów kluczowych _Complex i _Imaginary oraz nowych kwalifikatorów
Liczby zespolone w języku C (cz.) Standard ISO C99 wprowadza wsparcie dla liczb zespolonych w języku C. Jest to realizowane przez wprowadzenie słów kluczowych _Complex i _Imaginary oraz nowych kwalifikatorów
UKŁADY JEDNOWYMIAROWE. Część II UKŁADY LINIOWE Z OPÓŹNIENIEM
 UKŁADY JEDNOWYMIAROWE Część II UKŁADY LINIOWE Z OPÓŹNIENIEM 1 8. Wprowadzenie do części II W praktyce występują układy regulacji, których człony mogą przejawiać opóźnioną reakcję na sygnał wejściowy. Rozróżniamy
UKŁADY JEDNOWYMIAROWE Część II UKŁADY LINIOWE Z OPÓŹNIENIEM 1 8. Wprowadzenie do części II W praktyce występują układy regulacji, których człony mogą przejawiać opóźnioną reakcję na sygnał wejściowy. Rozróżniamy
INSTYTUT ENERGOELEKTRYKI POLITECHNIKI WROCŁAWSKIEJ Raport serii SPRAWOZDANIA Nr LABORATORIUM TEORII STEROWANIA INSTRUKCJA LABORATORYJNA
 Na prawach ręopi do żyt łżbowego INSYU ENERGOELEKRYKI POLIECHNIKI WROCŁAWSKIEJ Raport erii SPRAWOZDANIA Nr LABORAORIUM EORII SEROWANIA INSRUKCJA LABORAORYJNA ĆWICZENIE Nr 4 Minimalnoczaowe terowanie optymalne
Na prawach ręopi do żyt łżbowego INSYU ENERGOELEKRYKI POLIECHNIKI WROCŁAWSKIEJ Raport erii SPRAWOZDANIA Nr LABORAORIUM EORII SEROWANIA INSRUKCJA LABORAORYJNA ĆWICZENIE Nr 4 Minimalnoczaowe terowanie optymalne
PODSTAWY AUTOMATYKI. Analiza w dziedzinie czasu i częstotliwości dla elementarnych obiektów automatyki.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI Analiza w dziedzinie czasu i częstotliwości dla elementarnych obiektów automatyki. Materiały pomocnicze do
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI Analiza w dziedzinie czasu i częstotliwości dla elementarnych obiektów automatyki. Materiały pomocnicze do
CHARAKTERYSTYKI CZASOWE UKŁADÓW DYNAMICZNYCH
 CHARAKERYSYKI CZASOWE UKŁADÓW DYNAMICZNYCH Zadani Chararyyi czaow uładów. Odpowidź oową wyznacza ię z wzoru: { } Problm: h L G X Wyznaczyć odpowidz oową i impulową całującgo z inrcją G h L G gdzi: Y X
CHARAKERYSYKI CZASOWE UKŁADÓW DYNAMICZNYCH Zadani Chararyyi czaow uładów. Odpowidź oową wyznacza ię z wzoru: { } Problm: h L G X Wyznaczyć odpowidz oową i impulową całującgo z inrcją G h L G gdzi: Y X
6 = λ Częstotliwość odbierana przez nieruchomą głowicę, gdy źródło o prędkości v s emituje falę o częstotliwości f k : + = g g
 Projet Fizya wobec wyzwań XXI w. wpółinanowany przez Unię Europeją ze środów Europejieo Funduzu Społeczneo w raach Prorau Operacyjneo Kapitał Ludzi Zadania z olowiu 16.11.2009 (Fizya Medyczna i Neuroinoratya)
Projet Fizya wobec wyzwań XXI w. wpółinanowany przez Unię Europeją ze środów Europejieo Funduzu Społeczneo w raach Prorau Operacyjneo Kapitał Ludzi Zadania z olowiu 16.11.2009 (Fizya Medyczna i Neuroinoratya)
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
13. ANALIZA CZĘSTOTLIWOŚCIOWA UKŁADÓW SLS
 OBWODY SYGNAŁY Wykład 3 : Analiza częstotliwościowa układów SLS 3. ANALZA ZĘSTOTLWOŚOWA ŁADÓW SLS 3.. POJĘE MMTANJ TANSMTANJ ozpatrzmy układ elektryczny, na który działa wymuszenie harmoniczne o symbolicznej
OBWODY SYGNAŁY Wykład 3 : Analiza częstotliwościowa układów SLS 3. ANALZA ZĘSTOTLWOŚOWA ŁADÓW SLS 3.. POJĘE MMTANJ TANSMTANJ ozpatrzmy układ elektryczny, na który działa wymuszenie harmoniczne o symbolicznej
INSTYTUT ENERGOELEKTRYKI POLITECHNIKI WROCŁAWSKIEJ Raport serii SPRAWOZDANIA Nr LABORATORIUM TEORII I TEHCNIKI STEROWANIA INSTRUKCJA LABORATORYJNA
 Na prawach rękopiu do użytku łużbowego INSTYTUT ENEROELEKTRYKI POLITECHNIKI WROCŁAWSKIEJ Raport erii SPRAWOZDANIA Nr LABORATORIUM TEORII I TEHCNIKI STEROWANIA INSTRUKCJA LABORATORYJNA ĆWICZENIE Nr SPOSOBY
Na prawach rękopiu do użytku łużbowego INSTYTUT ENEROELEKTRYKI POLITECHNIKI WROCŁAWSKIEJ Raport erii SPRAWOZDANIA Nr LABORATORIUM TEORII I TEHCNIKI STEROWANIA INSTRUKCJA LABORATORYJNA ĆWICZENIE Nr SPOSOBY
EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 2015/2016
 EUROELEKTRA Ogólnopolka Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok zkolny 015/016 Zadania z elektrotechniki na zawody III topnia Rozwiązania Intrukcja dla zdającego 1. Cza trwania zawodów: 10 minut..
EUROELEKTRA Ogólnopolka Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok zkolny 015/016 Zadania z elektrotechniki na zawody III topnia Rozwiązania Intrukcja dla zdającego 1. Cza trwania zawodów: 10 minut..
Układ regulacji automatycznej (URA) kryteria stabilności
 kryteria stabilności") Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Układ regulacji automatycznej (URA) kryteria stabilności y o e G c (s) z z 2 u G o (s) y () = () ()() () H(s) oraz jego wartością w stanie ustalonym. Transmitancja układu otwartego regulacji: - () = ()
Filtry aktywne czasu ciągłego i dyskretnego
 Politechnika Wrocławka czau ciągłego i dykretnego Wrocław 5 Politechnika Wrocławka, w porównaniu z filtrami paywnymi L, różniają ię wieloma zaletami, np. dużą tabilnością pracy, dokładnością, łatwością
Politechnika Wrocławka czau ciągłego i dykretnego Wrocław 5 Politechnika Wrocławka, w porównaniu z filtrami paywnymi L, różniają ię wieloma zaletami, np. dużą tabilnością pracy, dokładnością, łatwością
W celu obliczenia charakterystyki częstotliwościowej zastosujemy wzór 1. charakterystyka amplitudowa 0,
 Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
Bierne obwody RC. Filtr dolnoprzepustowy. Filtr dolnoprzepustowy jest układem przenoszącym sygnały o małej częstotliwości bez zmian, a powodującym tłumienie i opóźnienie fazy sygnałów o większych częstotliwościach.
Wykonawcy: Data Wydział Elektryczny Studia dzienne Nr grupy:
 POLITECHNIKA POZNAŃSKA INSTYTUT ELEKTROTECHNIKI I ELEKTRONIKI PRZEMYSŁOWEJ Zakład Elektrotechniki Teoretycznej i Stosowanej Laboratorium Podstaw Telekomunikacji Ćwiczenie nr 2 Temat: Projektowanie i analiza
POLITECHNIKA POZNAŃSKA INSTYTUT ELEKTROTECHNIKI I ELEKTRONIKI PRZEMYSŁOWEJ Zakład Elektrotechniki Teoretycznej i Stosowanej Laboratorium Podstaw Telekomunikacji Ćwiczenie nr 2 Temat: Projektowanie i analiza
Filtry aktywne czasu ciągłego i dyskretnego
 Politechnika Wrocławka czau ciągłego i dykretnego Wrocław 6 Politechnika Wrocławka Filtry toowanie filtrów w elektronice ma na celu eliminowanie czy też zmniejzenie wpływu ygnałów o niepożądanej czętotliwości
Politechnika Wrocławka czau ciągłego i dykretnego Wrocław 6 Politechnika Wrocławka Filtry toowanie filtrów w elektronice ma na celu eliminowanie czy też zmniejzenie wpływu ygnałów o niepożądanej czętotliwości
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE PODSTAWOWYCH CZŁONÓW LINIOWYCH UKŁADÓW AUTOMATYKI
 CHARAKERYSYKI CZĘSOLIWOŚCIOWE PODSAWOWYCH CZŁONÓW LINIOWYCH UKŁADÓW AUOMAYKI Do podstawowych form opisu dyamii elemetów automatyi (oprócz rówań różiczowych zaliczamy trasmitację operatorową s oraz trasmitację
CHARAKERYSYKI CZĘSOLIWOŚCIOWE PODSAWOWYCH CZŁONÓW LINIOWYCH UKŁADÓW AUOMAYKI Do podstawowych form opisu dyamii elemetów automatyi (oprócz rówań różiczowych zaliczamy trasmitację operatorową s oraz trasmitację
Filtry aktywne czasu ciągłego i dyskretnego
 Politechnika Wrocławka Intytut Telekomunikacji, Teleinformatyki i Akutyki czau ciągłego i dykretnego Wrocław 9 Politechnika Wrocławka Intytut Telekomunikacji, Teleinformatyki i Akutyki odzaje Ze względu
Politechnika Wrocławka Intytut Telekomunikacji, Teleinformatyki i Akutyki czau ciągłego i dykretnego Wrocław 9 Politechnika Wrocławka Intytut Telekomunikacji, Teleinformatyki i Akutyki odzaje Ze względu
Przekształcenia całkowe. Wykład 1
 Przekształcenia całkowe Wykład 1 Przekształcenia całkowe Tematyka wykładów: 1. Liczby zespolone -wprowadzenie, - funkcja zespolona zmiennej rzeczywistej, - funkcja zespolona zmiennej zespolonej. 2. Przekształcenie
Przekształcenia całkowe Wykład 1 Przekształcenia całkowe Tematyka wykładów: 1. Liczby zespolone -wprowadzenie, - funkcja zespolona zmiennej rzeczywistej, - funkcja zespolona zmiennej zespolonej. 2. Przekształcenie
Technika regulacji automatycznej
 Technika regulacji automatycznej Wykład 5 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 38 Plan wykładu Kompensator wyprzedzający Kompensator opóźniający
Technika regulacji automatycznej Wykład 5 Wojciech Paszke Instytut Sterowania i Systemów Informatycznych, Uniwersytet Zielonogórski 1 z 38 Plan wykładu Kompensator wyprzedzający Kompensator opóźniający