MODELOWANIE I SYMULACJE SYSTEMÓW ELEKTROMECHATRONICZNYCH. dr inż. Michał MICHNA
|
|
|
- Edyta Drozd
- 7 lat temu
- Przeglądów:
Transkrypt


1 MODELOWANIE I SYMULACJE SYSTEMÓW ELEKTROMECHATRONICZNYCH dr inż. Michał MICHNA
2 Harmonogram wykład, ćwiczenia E1 data kto temat 8 lut 15 lut MM Mechatronika/Systemy EM w 22 lut MM Modelowanie/Symulacja/Analiza w 29 lut GK Modelowanie metodą Lagrange'a w 7 mar GK Model SYN ABC - wyprowadzenie c 14 mar GK Model SYN ABC - wyprowadzenie c 21 mar MM Model SYN QD0 - wyprowadzenie c 28 mar MM Model SYN - symulacja Mathcad c 4 kwi MM Model SYN - symulacja SABER/MAST/SPICE c 11 kwi MM Układ napędowy SPS w 18 kwi MR Parametry SPS/SYN - dane katalogowe c 25 kwi MR Parametry SPS/SYN - metody doświadczalne c 2 maj 9 maj MM Parametry SPS/SYN metody numeryczne w 16 maj PM Modelowanie układów energoelektronicznych w 23 maj MM Prezentacja specjlaności w 2
3 Harmonogram laboratorium EM02 laboratorium EM02 lp GR1 GR2 GR3 PT 9-11 PT 9-11 ŚR kto temat 1 10 lut 15 lut MM wstęp/saber 2 17 lut MM wstęp/saber 3 24 lut 29 lut MM saber 4 2 mar MM saber 5 9 mar 14 mar MM mast 6 16 mar MM mast 7 23 mar 28 mar MM mast/labo 8 30 mar MM mast/labo 6 kwi 9 13 kwi 18 kwi MR Dymola/20Sim kwi MR Dymola/20Sim kwi PM Saber - prostownik 12 4 maj 9 maj PM Saber - prostownik maj 16 maj PM Saber - prostownik maj PM Saber - prostownik 3
4 Systemy EM Podstawowe zagadnienia i definicje 4
5 System elektromechaniczny Modelowanie system - obiekt lub zespół układów które są badane eksperyment doświadczenie naukowe przeprowadzone w kontrolowanych warunkach w celu zbadania jakiegoś zjawiska model zastępstwo dla rzeczywistego systemu, który obejmuje eksperyment modelowanie akt tworzenia modelu Symulacja eksperyment przeprowadzony na modelu, Symulator program komputerowy do przeprowadzania symulacji 5
6 System elektromechaniczny System obiekt lub zespół układów które są badane wzajemna konfiguracja elementów systemu oraz sposób przetwarzania informacji i realizacji sterowania zakłócenia Siły/momenty System e-mech ruchy Energia Aktory Alarmy Sensory modelowanie Ukł. sterowania nastawy 6
7 System elektromechaniczny Proces przekształcenie i transport materii, energii oraz informacji zakłócenia Siły/momenty System e-mech ruchy Energia Aktory Alarmy Sensory modelowanie Ukł. sterowania nastawy 7
8 System elektromechaniczny Elementy aktywne systemu Sensory przetwarzają wielkości pomiarowe w sygnały elektryczne Aktory realizuj ruchy i siły sterujące układem elektromechanicznym zakłócenia Siły/momenty System e-mech ruchy Energia Aktory Alarmy Sensory modelowanie Ukł. sterowania nastawy 8
9 Cel modelowania i symulacji systemów EM Wyznaczanie przebiegów prądów i napięć Obliczanie wartości średnich, skutecznych, i szczytowych prądów i napięć Analiza systemu w stanach awaryjnych Sprawdzenie poprawności koncepcji nowego systemu Optymalizacja parametrów wybranych elementów Badania wrażliwości układu na zmiany wartości wybranych parametrów 9
10 Badania doświadczalne Układ rzeczywisty Modelowanie fizyczne model fizyczny Modelowanie matematyczne model matematyczny Analiza właściwości dynamicznych Poprawki modelu Warunki techniczne Decyzje konstrukcyjne Modelowanie fizyczne Dokładne określenie układu, ustalenie istotnych cech i budowa modelu fizycznego - zakładanie przybliżeń Pominięcie małych wpływów, niezależność układu od otoczenia, parametry skupione 10
11 Badania doświadczalne Układ rzeczywisty Modelowanie fizyczne model fizyczny Modelowanie matematyczne model matematyczny Analiza właściwości dynamicznych Poprawki modelu Warunki techniczne Decyzje konstrukcyjne Modelowanie matematyczne analityczny opis zjawisk dynamicznych odzwierciedlanych modelem fizycznym, czyli znalezienie modelu matematycznego równań różniczkowych 11
12 Badania doświadczalne Układ rzeczywisty Modelowanie fizyczne model fizyczny Modelowanie matematyczne model matematyczny Analiza właściwości dynamicznych Poprawki modelu Warunki techniczne Decyzje konstrukcyjne Analiza właściwości dynamicznych przestudiowanie własności dynamicznych modelu matematycznego na podstawie rozwiązania równań różniczkowych ruchu, ustalenie przewidywanego ruchu układu 12
13 Badania doświadczalne Układ rzeczywisty Modelowanie fizyczne model fizyczny Modelowanie matematyczne model matematyczny Analiza właściwości dynamicznych Poprawki modelu Warunki techniczne Decyzje konstrukcyjne Decyzje konstrukcyjne podjęcie decyzji projektowych, tj. przyjęcie fizycznych parametrów układu 13
14 Analiza systemu Model materialny Urządzenie podobne do oryginału Model matematyczny Model Opis matematyczny odzwierciedlający zachowanie się oryginału w warunkach rzeczywistych Nie ma możliwości badania konkretnego urządzenia Badania rzeczywisty są kosztowne i niebezpieczne Szybkość procesów jest bardzo duża lub mała Wielokrotne badanie w różnych warunkach 14
15 Model to uproszczone przedstawienie wybranego fragmentu rzeczywistości celem lepszego jej zrozumienia Modele materialne Model skalowany Model reprezentujący sposób działania - analog Modele symboliczne Słowne Graficzne Matematyczne 15
16 Modele Symboliczny Materialny Jakościowy Ilościowy Skalowany Analogowy Wyjaśniający Opisowy Strukturalny Funkcjonalno predykcyjny FEM Zmienne stanu Symptomowo wskaźnikowe 16
17 Układ rzeczywisty Modelowanie fizyczne Model fizyczny Modelowanie matematyczne Model matematyczny Model fizyczny układ fizyczny, odpowiadający rzeczywistemu układowi pod względem cech istotnych dla badanego zagadnienia, ale prostszy i poddający się łatwiej studiom analitycznym.
18 Układ rzeczywisty Modelowanie fizyczne Model fizyczny Modelowanie matematyczne Model matematyczny Uproszczenia Pomijanie małych wpływów zmniejsza się liczba równań i zmiennych Niezależność otoczenia od badanego układu Parametry skupione Liniowość Unikanie nieokreśloności i pomijanie szumów
19 Układ rzeczywisty Modelowanie fizyczne Model fizyczny Modelowanie matematyczne Model matematyczny Model matematyczny model matematyczny składa się z wyrażeń i funkcji matematycznych. Model określa reguły wzajemnej zależności wielkości wejściowych i wyjściowych Model powinien być poprawny i użyteczny Kompletny, logiczny, jednoznaczny
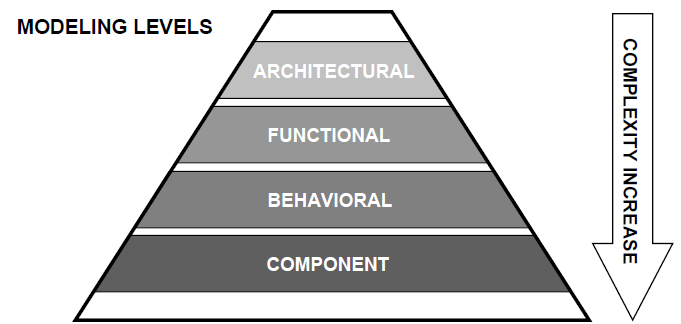
20 Matematyczne modele fizyczne Matematyczny zapis zjawisk fizycznych zachodzących w obiekcie/elemencie/systemie Istotne są procesy zachodzące w elemencie Matematyczne modele funkcjonalne Modele bazujące na charakterystykach zewnętrznych bez opisu zjawisk zachodzących wewnątrz danego układu Istotne jest poprawne zachowanie układu 20
21 21
22 Systemowy Funkcjonalny Behawioralny Komponentowy 22
23 Modelowanie, symulacja, badania Sugeruje i interpretuje doświadczenia Teoria Eksperyment Sugeruje i uwiarygodnia teorie Sugeruje teorie Wykonuje obliczenia Dostarcza równania Interpretuje wyniki Generuje dane Modeluje rzeczywiste procesy Sugeruje doświadczenia Analizuje dane Steruje aparaturą Modelowanie i symulacja 23
24 Statyka i dynamika obiektu Stan ustalony Stan quasi-ustalony Stan nieustalony Model statyczny równania algebraiczne Jednoznacznie opisuje relacje między zmiennymi wejściowymi i wyjściowymi w stanie ustalonym Model dynamiczny równania różniczkowe Wynikają ze zdolności niektórych elementów do akumulowania energii, masy, ładunku 24
25 Modelowanie i symulacje Metody opracowywania modeli Metody analityczne Model matematyczny Metody eksperymentalne Model materialny (skalowalny) Metody numeryczne Model polowy
26 Modelowanie analityczne Wybór zmiennych Opisują chwilowy stan układu, pozwalają na jego analizę Warunki równowagi i spójności Zależności wyrażające równowagę układu, zależności występujące pomiędzy ruchami elementów układu Prawa fizyki Zależności fizyczne elementów układu
27 Zmienne przepływu i spadku Przepływ energii pomiędzy dwoma modelami elementów SE, niezależnie od ich natury fizycznej, opisują dwie wielkości: zmienne przepływu (through, flow) zmienne spadku/potencjału (across, potencial) Model A p zmienna przepływu zmienna spadku, zmienna biegunowa p Model B m m Zależności fizyczne Zależności pomiędzy zmiennymi przepływu i zmiennymi spadku 27 M. Michna
28 Zmienne przepływu (through) Miara czegoś co przechodzi przez element Powiązanie przez zależności równowagi (prawo Kirchoffa) Element układu

29 Zmienne spadku (across) Miara różnicy stanów na dwóch końcach Powiązana zależnościami spójności Element układu
30 Zmienne przepływu i spadku Through variable Across variable Electrical current (i) voltage (v) Rotational torque (tq_nm) angular velocity (w_radps) Mechanical force (frc_n) translational position (pos_m) Magnetic flux (f) magneto-motive force (mmf) Fluid flow rate (q_m3ps) pressure (p_npm2) Thermal heat flow rate (p) temperature (tc) Light luminous flux illuminance 30 M. Michna

31 Prawa zachowania Prawa zachowania Energii Masy uproszczenia Ładunku Akumulacja wielkości X = Dopływ netto wielkości X do układu + Ilość wielkości X wytwarzanej w układzie 31 M. Michna
32 Literatura Czemplik A.: Modele dynamiki układów fizycznych dla inżynierów. Zasady i przykłady konstrukcji modeli dynamicznych obiektów automatyki. WNT 2008 Turowski J.: Podstawy mechatroniki. WSHE 2008 Szczęsny R.: Komputerowa symulacja układów enegoelektronicznych. WPG 1999 Żółtowski B. : Badania dynamiki maszyn Cannon R.H. : Dynamika układów fizycznych WNT
MODELOWANIE I SYMULACJE SYSTEMÓW ELEKTROMECHATRONICZNYCH. dr inż. Michał MICHNA
 MODELOWANIE I SYMULACJE SYSTEMÓW ELEKTROMECHATRONICZNYCH dr inż. Michał MICHNA Harmonogram wykład, ćwiczenia E1 data kto temat 8 lut 15 lut MM Mechatronika/Systemy EM w 22 lut MM Modelowanie/Symulacja/Analiza
MODELOWANIE I SYMULACJE SYSTEMÓW ELEKTROMECHATRONICZNYCH dr inż. Michał MICHNA Harmonogram wykład, ćwiczenia E1 data kto temat 8 lut 15 lut MM Mechatronika/Systemy EM w 22 lut MM Modelowanie/Symulacja/Analiza
Modelowanie jako sposób opisu rzeczywistości. Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka
 Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Najprostszy schemat blokowy
 Definicje Modelowanie i symulacja Modelowanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego układu rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano
Definicje Modelowanie i symulacja Modelowanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego układu rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano
ODWZOROWANIE RZECZYWISTOŚCI
 ODWZOROWANIE RZECZYWISTOŚCI RZECZYWISTOŚĆ RZECZYWISTOŚĆ OBIEKTYWNA Ocena subiektywna OPIS RZECZYWISTOŚCI Odwzorowanie rzeczywistości zależy w dużej mierze od możliwości i nastawienia człowieka do otoczenia
ODWZOROWANIE RZECZYWISTOŚCI RZECZYWISTOŚĆ RZECZYWISTOŚĆ OBIEKTYWNA Ocena subiektywna OPIS RZECZYWISTOŚCI Odwzorowanie rzeczywistości zależy w dużej mierze od możliwości i nastawienia człowieka do otoczenia
Definicje. Najprostszy schemat blokowy. Schemat dokładniejszy
 Definicje owanie i symulacja owanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano model, do
Definicje owanie i symulacja owanie zastosowanie określonej metodologii do stworzenia i weryfikacji modelu dla danego rzeczywistego Symulacja zastosowanie symulatora, w którym zaimplementowano model, do
Metody symulacji komputerowych Modelowanie systemów technicznych
 Metody symulacji komputerowych Modelowanie systemów technicznych dr inż. Ryszard Myhan Katedra Inżynierii Procesów Rolniczych Program przedmiotu Lp. Temat Zakres 1. Wprowadzenie do teorii systemów Definicje
Metody symulacji komputerowych Modelowanie systemów technicznych dr inż. Ryszard Myhan Katedra Inżynierii Procesów Rolniczych Program przedmiotu Lp. Temat Zakres 1. Wprowadzenie do teorii systemów Definicje
Modelowanie i obliczenia techniczne. dr inż. Paweł Pełczyński
 Modelowanie i obliczenia techniczne dr inż. Paweł Pełczyński ppelczynski@swspiz.pl Literatura Z. Fortuna, B. Macukow, J. Wąsowski: Metody numeryczne, WNT Warszawa, 2005. J. Awrejcewicz: Matematyczne modelowanie
Modelowanie i obliczenia techniczne dr inż. Paweł Pełczyński ppelczynski@swspiz.pl Literatura Z. Fortuna, B. Macukow, J. Wąsowski: Metody numeryczne, WNT Warszawa, 2005. J. Awrejcewicz: Matematyczne modelowanie
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i sterowanie w gazownictwie wstęp. Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów
 Automatyka i sterowanie w gazownictwie wstęp Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów Sprawy organizacyjne Wykłady (15 h) Dr inż. Iwona Oprzędkiewicz
Automatyka i sterowanie w gazownictwie wstęp Autor: dr inż. Iwona Oprzędkiewicz Nazwa wydziału: WIMiR Nazwa katedry: Katedra Automatyzacji Procesów Sprawy organizacyjne Wykłady (15 h) Dr inż. Iwona Oprzędkiewicz
Jacek Skorupski pok. 251 tel konsultacje: poniedziałek , sobota zjazdowa
 Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
Kierunek: Matematyka w technice
 Kierunek: Matematyka w technice Wykaz modułów kształcenia z podziałem na semestry Forma zajęć: W wykład C ćwiczenia L laboratorium P projekt S searium E egza Semestr 1 Analiza matematyczna I Algebra liniowa
Kierunek: Matematyka w technice Wykaz modułów kształcenia z podziałem na semestry Forma zajęć: W wykład C ćwiczenia L laboratorium P projekt S searium E egza Semestr 1 Analiza matematyczna I Algebra liniowa
Procedura modelowania matematycznego
 Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
Procedura modelowania matematycznego System fizyczny Model fizyczny Założenia Uproszczenia Model matematyczny Analiza matematyczna Symulacja komputerowa Rozwiązanie w postaci modelu odpowiedzi Poszerzenie
MODELE I MODELOWANIE
 MODELE I MODELOWANIE Model układ materialny (np. makieta) lub układ abstrakcyjny (np..rysunki, opisy słowne, równania matematyczne). Model fizyczny (nominalny) opis procesów w obiekcie (fizycznych, również
MODELE I MODELOWANIE Model układ materialny (np. makieta) lub układ abstrakcyjny (np..rysunki, opisy słowne, równania matematyczne). Model fizyczny (nominalny) opis procesów w obiekcie (fizycznych, również
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu. Dynamicznych. Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Modelowanie systemów empirycznych
 Wprowadzenie do przedmiotu Modelowanie systemów empirycznych Dzadz Łukasz pok. 114 lukasz.dzadz@uwm.edu.pl Tel. 523-49-40 Katedra Inżynierii Systemów WNT UWM w Olsztynie 1 System Jest to obiekt fizyczny
Wprowadzenie do przedmiotu Modelowanie systemów empirycznych Dzadz Łukasz pok. 114 lukasz.dzadz@uwm.edu.pl Tel. 523-49-40 Katedra Inżynierii Systemów WNT UWM w Olsztynie 1 System Jest to obiekt fizyczny
Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy. Obowiązkowy Polski VI semestr zimowy
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Odniesienie do obszarowych efektów kształcenia 1 2 3. Kierunkowe efekty kształcenia WIEDZA (W)
") EFEKTY KSZTAŁCENIA NA KIERUNKU "MECHATRONIKA" nazwa kierunku studiów: Mechatronika poziom kształcenia: studia pierwszego stopnia profil kształcenia: ogólnoakademicki symbol kierunkowych efektów kształcenia
EFEKTY KSZTAŁCENIA NA KIERUNKU "MECHATRONIKA" nazwa kierunku studiów: Mechatronika poziom kształcenia: studia pierwszego stopnia profil kształcenia: ogólnoakademicki symbol kierunkowych efektów kształcenia
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Specjalność: Komputerowe systemy sterowania i diagnostyki. Strona 1 z 5
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: systemy sterowania Rodzaj zajęć: wykład, laboratorium UKŁADY AUTOMATYKI PRZEMYSŁOWEJ Industrial Automatics Systems
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: systemy sterowania Rodzaj zajęć: wykład, laboratorium UKŁADY AUTOMATYKI PRZEMYSŁOWEJ Industrial Automatics Systems
INŻYNIERIA SYSTEMÓW wykład 4 MODELE SYSTEMÓW MODELOWANIE I SYMULACJA. Autor: dr inż. ROMAN DOMAŃSKI
 1 INŻYNIERIA SYSTEMÓW wykład 4 MODELE SYSTEMÓW MODELOWANIE I SYMULACJA Autor: dr inż. ROMAN DOMAŃSKI Literatura 2 CEMPEL Czesław Teoria i inżynieria systemów zasady i zastosowania myślenia systemowego
1 INŻYNIERIA SYSTEMÓW wykład 4 MODELE SYSTEMÓW MODELOWANIE I SYMULACJA Autor: dr inż. ROMAN DOMAŃSKI Literatura 2 CEMPEL Czesław Teoria i inżynieria systemów zasady i zastosowania myślenia systemowego
Elektrotechnika II stopień ogólnoakademicki. stacjonarne. przedmiot specjalnościowy. obowiązkowy polski semestr II semestr letni. tak. Laborat. 30 g.
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Metody estymacji parametrów i sygnałów Estimation methods of parameters
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Metody estymacji parametrów i sygnałów Estimation methods of parameters
Dr hab. inż. Jan Duda. Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji
 Automatyzacja i Robotyzacja Procesów Produkcyjnych Dr hab. inż. Jan Duda Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji Podstawowe pojęcia Automatyka Nauka o metodach i układach sterowania
Automatyzacja i Robotyzacja Procesów Produkcyjnych Dr hab. inż. Jan Duda Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji Podstawowe pojęcia Automatyka Nauka o metodach i układach sterowania
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
WYDZIAŁ TRANSPORTU I INFORMATYKI MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY
 WYDZIAŁ TRANSPORTU I INFORMATYKI Nazwa kierunku Poziom Profil Symbole efektów na kierunku K_W01 K _W 02 K _W03 K _W04 K _W05 K _W06 MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY Efekty - opis słowny Po
WYDZIAŁ TRANSPORTU I INFORMATYKI Nazwa kierunku Poziom Profil Symbole efektów na kierunku K_W01 K _W 02 K _W03 K _W04 K _W05 K _W06 MECHANIKA I BUDOWA MASZYN I STOPIEŃ PRAKTYCZNY Efekty - opis słowny Po
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
dr inż. Jan Staszak kierunkowy (podstawowy / kierunkowy / inny HES) obowiązkowy (obowiązkowy / nieobowiązkowy) język polski II
 obowiązkowy (obowiązkowy / nieobowiązkowy) język polski II") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
ECTS Razem 30 Godz. 330
 3-letnie stacjonarne studia licencjackie kier. Matematyka profil: ogólnoakademicki Semestr 1 Przedmioty wspólne Algebra liniowa z geometrią analityczną I 7 30 30 E Analiza matematyczna I 13 60 60 E Technologie
3-letnie stacjonarne studia licencjackie kier. Matematyka profil: ogólnoakademicki Semestr 1 Przedmioty wspólne Algebra liniowa z geometrią analityczną I 7 30 30 E Analiza matematyczna I 13 60 60 E Technologie
Podstawy Automatyki. wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)
 mgr inż. Łukasz Dworzak. Politechnika Wrocławska. Instytut Technologii Maszyn i Automatyzacji (I-24)") Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
Podstawy Automatyki wykład 1 (26.02.2010) mgr inż. Łukasz Dworzak Politechnika Wrocławska Instytut Technologii Maszyn i Automatyzacji (I-24) Laboratorium Podstaw Automatyzacji (L6) 105/2 B1 Sprawy organizacyjne
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: SYSTEMY DYNAMICZNE 2. Kod przedmiotu: Esd 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Techniki Komputerowe
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: SYSTEMY DYNAMICZNE 2. Kod przedmiotu: Esd 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Techniki Komputerowe
dr inż. Jan Staszak kierunkowy (podstawowy / kierunkowy / inny HES) obowiązkowy (obowiązkowy / nieobowiązkowy) język polski II
 obowiązkowy (obowiązkowy / nieobowiązkowy) język polski II") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KIERUNKOWE EFEKTY KSZTAŁCENIA
 Zał. nr 1 do Programu kształcenia KIERUNKOWE EFEKTY KSZTAŁCENIA WYDZIAŁ INFORMATYKI I ZARZĄDZANIA Kierunek studiów: INŻYNIERIA SYSTEMÓW Stopień studiów: STUDIA II STOPNIA Obszar Wiedzy/Kształcenia: OBSZAR
Zał. nr 1 do Programu kształcenia KIERUNKOWE EFEKTY KSZTAŁCENIA WYDZIAŁ INFORMATYKI I ZARZĄDZANIA Kierunek studiów: INŻYNIERIA SYSTEMÓW Stopień studiów: STUDIA II STOPNIA Obszar Wiedzy/Kształcenia: OBSZAR
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Dynamika aparatury pomiarowej Rok akademicki: 2014/2015 Kod: EEL-2-214-PT-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Nazwa modułu: Dynamika aparatury pomiarowej Rok akademicki: 2014/2015 Kod: EEL-2-214-PT-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych
 Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Ćwiczenie 3 Badanie własności podstawowych liniowych członów automatyki opartych na biernych elementach elektrycznych Cel ćwiczenia Celem ćwiczenia jest poznanie podstawowych własności członów liniowych
Przekształcanie schematów blokowych. Podczas ćwiczenia poruszane będą następujące zagadnienia:
 Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
Warszawa 2017 1 Cel ćwiczenia rachunkowego Podczas ćwiczenia poruszane będą następujące zagadnienia: zasady budowy schematów blokowych układów regulacji automatycznej na podstawie równań operatorowych;
MT 2 N _0 Rok: 1 Semestr: 1 Forma studiów:
 Mechatronika Studia drugiego stopnia Przedmiot: Diagnostyka maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT N 0 1 1-0_0 Rok: 1 Semestr: 1 Forma studiów: Studia niestacjonarne Rodzaj zajęć i liczba
Mechatronika Studia drugiego stopnia Przedmiot: Diagnostyka maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT N 0 1 1-0_0 Rok: 1 Semestr: 1 Forma studiów: Studia niestacjonarne Rodzaj zajęć i liczba
Sterowanie Napędów Maszyn i Robotów
 Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA1 2. Kod przedmiotu: Ro1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Elektroautomatyka Okrętowa
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA1 2. Kod przedmiotu: Ro1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Elektroautomatyka Okrętowa
Modelowanie w projektowaniu maszyn i procesów cz.5
 Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
PAKIET INFORMACYJNY - informacje uzupełniające
 Wydział Elektrotechniki, Informatyki i Telekomunikacji Uniwersytet Zielonogórski PAKIET INFORMACYJNY - informacje uzupełniające Kierunek: ELEKTROTECHNIKA studia inŝynierskie I stopnia Rok akademicki 2011/2012
Wydział Elektrotechniki, Informatyki i Telekomunikacji Uniwersytet Zielonogórski PAKIET INFORMACYJNY - informacje uzupełniające Kierunek: ELEKTROTECHNIKA studia inŝynierskie I stopnia Rok akademicki 2011/2012
Kierunkowe efekty kształcenia wraz z odniesieniem do efektów obszarowych. Energetyka studia I stopnia
 Załącznik 3 do uchwały nr /d/05/2012 Wydział Mechaniczny PK Kierunkowe efekty kształcenia wraz z odniesieniem do efektów Kierunek: Energetyka studia I stopnia Lista efektów z odniesieniem do efektów Kierunek:
Załącznik 3 do uchwały nr /d/05/2012 Wydział Mechaniczny PK Kierunkowe efekty kształcenia wraz z odniesieniem do efektów Kierunek: Energetyka studia I stopnia Lista efektów z odniesieniem do efektów Kierunek:
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Efekty kształcenia na kierunku AiR drugiego stopnia - Wiedza Wydziału Elektrotechniki, Automatyki i Informatyki Politechniki Opolskiej
 Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
WYDZIAŁ TECHNICZNO-PRZYRODNICZY
 WYDZIAŁ TECHNICZNO-PRZYRODNICZY KARTA PRZEDMIOTU Nazwa w języku polskim: Napęd elektryczny Nazwa w języku angielskim: Electrical Drive Kierunek studiów (jeśli dotyczy): Inżynieria Odnawialnych Źródeł Energii
WYDZIAŁ TECHNICZNO-PRZYRODNICZY KARTA PRZEDMIOTU Nazwa w języku polskim: Napęd elektryczny Nazwa w języku angielskim: Electrical Drive Kierunek studiów (jeśli dotyczy): Inżynieria Odnawialnych Źródeł Energii
Kierunkowe efekty kształcenia wraz z odniesieniem do efektów obszarowych. Elektrotechnika studia I stopnia
 Załącznik 1 do uchwały nr 32/d/05/2012 Wydział Inżynierii Elektrycznej i Komputerowej PK Kierunkowe efekty kształcenia wraz z odniesieniem do efektów Kierunek: Elektrotechnika studia I stopnia Lista efektów
Załącznik 1 do uchwały nr 32/d/05/2012 Wydział Inżynierii Elektrycznej i Komputerowej PK Kierunkowe efekty kształcenia wraz z odniesieniem do efektów Kierunek: Elektrotechnika studia I stopnia Lista efektów
3-letnie (6-semestralne) stacjonarne studia licencjackie kier. matematyka stosowana profil: ogólnoakademicki. Semestr 1. Przedmioty wspólne
 stacjonarne studia licencjackie kier. matematyka stosowana profil: ogólnoakademicki. Semestr 1. Przedmioty wspólne") 3-letnie (6-semestralne) stacjonarne studia licencjackie kier. matematyka stosowana profil: ogólnoakademicki Semestr 1 Przedmioty wspólne Nazwa przedmiotu ECTS W Ć L P S Zal. Algebra liniowa z geometrią
3-letnie (6-semestralne) stacjonarne studia licencjackie kier. matematyka stosowana profil: ogólnoakademicki Semestr 1 Przedmioty wspólne Nazwa przedmiotu ECTS W Ć L P S Zal. Algebra liniowa z geometrią
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Oferta badawcza Politechniki Gdańskiej dla przedsiębiorstw
 KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
Napęd elektryczny Electric Drives 2012/2013. Elektrotechnika I stopień Ogólnoakademicki niestacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Napęd elektryczny
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Napęd elektryczny
Zakład Metrologii i Systemów Pomiarowych Laboratorium Metrologii I. Grupa. Nr ćwicz.
 Laboratorium Metrologii I Politechnika zeszowska akład Metrologii i Systemów Pomiarowych Laboratorium Metrologii I Mostki niezrównoważone prądu stałego I Grupa Nr ćwicz. 12 1... kierownik 2... 3... 4...
Laboratorium Metrologii I Politechnika zeszowska akład Metrologii i Systemów Pomiarowych Laboratorium Metrologii I Mostki niezrównoważone prądu stałego I Grupa Nr ćwicz. 12 1... kierownik 2... 3... 4...
Napęd elektryczny Electric Drives 2012/2013. Elektrotechnika I stopień Ogólnoakademicki stacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Napęd elektryczny
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Napęd elektryczny
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności Mechatronika Rodzaj zajęć: Wykład, Laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Poznanie
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności Mechatronika Rodzaj zajęć: Wykład, Laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Poznanie
studia I stopnia, stacjonarne rok akademicki 2017/2018 Elektrotechnika
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek, stacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Strona 1 z stacjonarne profil ogólnoakademicki
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek, stacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Strona 1 z stacjonarne profil ogólnoakademicki
studia I stopnia, niestacjonarne rok akademicki 2017/2018 Elektrotechnika
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Elektrotechnika, niestacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Elektrotechnika Strona
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Elektrotechnika, niestacjonarne rok akademicki 2017/2018 Lp Nazwa przedmiotu ECTS Elektrotechnika Strona
E2_PA Podstawy automatyki Bases of automatic. Elektrotechnika II stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. P KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. P KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
S Y L A B U S P R Z E D M I O T U. Urządzenia wykonawcze Actuators, design and function
 "Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki Prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: Podstawowa jednostka organizacyjna
"Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki Prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: Podstawowa jednostka organizacyjna
Podstawy elektroniki i miernictwa
 Podstawy elektroniki i miernictwa Kod modułu: ELE Rodzaj przedmiotu: podstawowy; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Poziom studiów: pierwszego stopnia Profil studiów: ogólnoakademicki
Podstawy elektroniki i miernictwa Kod modułu: ELE Rodzaj przedmiotu: podstawowy; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Poziom studiów: pierwszego stopnia Profil studiów: ogólnoakademicki
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA
 PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
NOWOCZESNE TECHNOLOGIE ENERGETYCZNE Rola modelowania fizycznego i numerycznego
 Politechnika Częstochowska Katedra Inżynierii Energii NOWOCZESNE TECHNOLOGIE ENERGETYCZNE Rola modelowania fizycznego i numerycznego dr hab. inż. Zbigniew BIS, prof P.Cz. dr inż. Robert ZARZYCKI Wstęp
Politechnika Częstochowska Katedra Inżynierii Energii NOWOCZESNE TECHNOLOGIE ENERGETYCZNE Rola modelowania fizycznego i numerycznego dr hab. inż. Zbigniew BIS, prof P.Cz. dr inż. Robert ZARZYCKI Wstęp
Podstawy metodologiczne symulacji
 Sławomir Kulesza kulesza@matman.uwm.edu.pl Symulacje komputerowe (05) Podstawy metodologiczne symulacji Wykład dla studentów Informatyki Ostatnia zmiana: 26 marca 2015 (ver. 4.1) Spirala symulacji optymistycznie
Sławomir Kulesza kulesza@matman.uwm.edu.pl Symulacje komputerowe (05) Podstawy metodologiczne symulacji Wykład dla studentów Informatyki Ostatnia zmiana: 26 marca 2015 (ver. 4.1) Spirala symulacji optymistycznie
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE MASZYN DRIVES AND ELEKTRO-HYDRAULIC MACHINERY CONTROL SYSTEMS Kierunek: Mechatronika Forma studiów: STACJONARNE Kod przedmiotu: S1_07 Rodzaj przedmiotu:
Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE MASZYN DRIVES AND ELEKTRO-HYDRAULIC MACHINERY CONTROL SYSTEMS Kierunek: Mechatronika Forma studiów: STACJONARNE Kod przedmiotu: S1_07 Rodzaj przedmiotu:
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia
 modułu/przedmiotu Transport Studia I stopnia") Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia Przedmiot: Diagnostyka techniczna Rodzaj przedmiotu: Podstawowy/obowiązkowy Kod przedmiotu: TR 1 S 0 4 9-0_1 Rok: Semestr: 4 Forma studiów:
Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia Przedmiot: Diagnostyka techniczna Rodzaj przedmiotu: Podstawowy/obowiązkowy Kod przedmiotu: TR 1 S 0 4 9-0_1 Rok: Semestr: 4 Forma studiów:
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki i Lotnictwa prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: KOMPUTEROWA ANALIZA KONSTRUKCJI
"Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki i Lotnictwa prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: KOMPUTEROWA ANALIZA KONSTRUKCJI
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
INSTRUKCJA DO ĆWICZENIA NR 7
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu:
 Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu: Semestr 1 2 3 4 Rodzaj Forma Forma Liczba zajęć zajęć zaliczeń godzin Szkolenie biblioteczne
Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu: Semestr 1 2 3 4 Rodzaj Forma Forma Liczba zajęć zajęć zaliczeń godzin Szkolenie biblioteczne
Uniwersytet Wirtualny VU2012
 XII Konferencja Uniwersytet Wirtualny VU2012 M o d e l N a r z ę d z i a P r a k t y k a Andrzej ŻYŁAWSKI Warszawska Wyższa Szkoła Informatyki Marcin GODZIEMBA-MALISZEWSKI Instytut Technologii Eksploatacji
XII Konferencja Uniwersytet Wirtualny VU2012 M o d e l N a r z ę d z i a P r a k t y k a Andrzej ŻYŁAWSKI Warszawska Wyższa Szkoła Informatyki Marcin GODZIEMBA-MALISZEWSKI Instytut Technologii Eksploatacji
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
NIFIED M L ODELLING ANGUAGE. Diagramy czynności
 U M L NIFIED ODELLING ANGUAGE Diagramy czynności 1 Czym jest diagram czynności? Jeden z pięciu rodzajów diagramów UML służących do modelowania dynamicznych aspektów systemu. Przedstawia przepływ sterowania
U M L NIFIED ODELLING ANGUAGE Diagramy czynności 1 Czym jest diagram czynności? Jeden z pięciu rodzajów diagramów UML służących do modelowania dynamicznych aspektów systemu. Przedstawia przepływ sterowania
Metrologia: organizacja eksperymentu pomiarowego
 Metrologia: organizacja eksperymentu pomiarowego (na podstawie: Żółtowski B. Podstawy diagnostyki maszyn, 1996) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Teoria eksperymentu: Teoria eksperymentu
Metrologia: organizacja eksperymentu pomiarowego (na podstawie: Żółtowski B. Podstawy diagnostyki maszyn, 1996) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Teoria eksperymentu: Teoria eksperymentu
Zakładane efekty kształcenia dla kierunku
 Załącznik nr 1a do wytycznych dla rad podstawowych jednostek organizacyjnych do tworzenia nowych i weryfikacji istniejących programów studiów I i II stopnia w UTP w Bydgoszczy Zakładane efekty kształcenia
Załącznik nr 1a do wytycznych dla rad podstawowych jednostek organizacyjnych do tworzenia nowych i weryfikacji istniejących programów studiów I i II stopnia w UTP w Bydgoszczy Zakładane efekty kształcenia
WYDZIAŁ TRANSPORTU I INFORMATYKI TRANSPORT I STOPIEŃ PRAKTYCZNY
 Nazwa kierunku Poziom kształcenia Profil kształcenia Symbole efektów kształcenia na kierunku K_W01 K _W 02 K _W03 WYDZIAŁ TRANSPORTU I INFORMATYKI TRANSPORT I STOPIEŃ PRAKTYCZNY Efekty kształcenia - opis
Nazwa kierunku Poziom kształcenia Profil kształcenia Symbole efektów kształcenia na kierunku K_W01 K _W 02 K _W03 WYDZIAŁ TRANSPORTU I INFORMATYKI TRANSPORT I STOPIEŃ PRAKTYCZNY Efekty kształcenia - opis
INSTRUKCJA DO ĆWICZENIA NR 5
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
MODELOWANIE, IDENTYFIKACJA I SYMULACJA KOMPUTEROWA
 MODELOWANIE, IDENTYFIKACJA I SYMULACJA KOMPUTEROWA SS-II, AiR, I sem. Wykład 45h, Laboratorium 30h Wykład: dr inż. Jan Deskur, pok. 626, tel. 665-2735, 8776135 (dom) Jan.Deskur@put.poznan.pl Zakład Sterowania
MODELOWANIE, IDENTYFIKACJA I SYMULACJA KOMPUTEROWA SS-II, AiR, I sem. Wykład 45h, Laboratorium 30h Wykład: dr inż. Jan Deskur, pok. 626, tel. 665-2735, 8776135 (dom) Jan.Deskur@put.poznan.pl Zakład Sterowania
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
Załącznik nr 1 do Zapytania ofertowego: Opis przedmiotu zamówienia
 Załącznik nr 1 do Zapytania ofertowego: Opis przedmiotu zamówienia Postępowanie na świadczenie usług badawczo-rozwojowych referencyjny Zamawiającego: ZO CERTA 1/2017 Celem Projektu jest opracowanie wielokryterialnych
Załącznik nr 1 do Zapytania ofertowego: Opis przedmiotu zamówienia Postępowanie na świadczenie usług badawczo-rozwojowych referencyjny Zamawiającego: ZO CERTA 1/2017 Celem Projektu jest opracowanie wielokryterialnych
modelowanych zagadnie technicznych
 Przegl ą d powszechnie modelowanych zagadnie ń technicznych Wykład 0 - Wprowadzenie Jarosław Rybicki 2008 Etymologia symulacji similis (łac.) - podobieństwo, podobny similo (łac.) - podobnie simulare (łac.)
Przegl ą d powszechnie modelowanych zagadnie ń technicznych Wykład 0 - Wprowadzenie Jarosław Rybicki 2008 Etymologia symulacji similis (łac.) - podobieństwo, podobny similo (łac.) - podobnie simulare (łac.)
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: MECHANIKA TECHNICZNA 2. Kod przedmiotu: Kt 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Eksploatacja Systemów
I. KARTA PRZEDMIOTU. Nazwa przedmiotu: MECHANIKA TECHNICZNA 2. Kod przedmiotu: Kt 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Eksploatacja Systemów
WIEDZA. Ma podstawową wiedzę niezbędną do rozumienia ekonomicznych i innych pozatechnicznych uwarunkowań działalności inżynierskiej.
 Efekty kształcenia dla kierunku: LOGISTYKA Wydział: ORGANIZACJI I ZARZĄDZANIA nazwa kierunku studiów: Logistyka poziom kształcenia: studia I stopnia profil kształcenia: ogólnoakademicki symbol K1A_W01
Efekty kształcenia dla kierunku: LOGISTYKA Wydział: ORGANIZACJI I ZARZĄDZANIA nazwa kierunku studiów: Logistyka poziom kształcenia: studia I stopnia profil kształcenia: ogólnoakademicki symbol K1A_W01
Kierunkowe efekty kształcenia Po ukończeniu studiów absolwent :
 Załącznik nr 16 do uchwały nr 437 /06 /2012 Senatu UR z dnia 21 czerwca 2012 roku EFEKTY KSZTAŁCENIA DLA KIERUNKU STUDIÓW Mechatronika poziom kształcenia profil kształcenia tytuł zawodowy absolwenta studia
Załącznik nr 16 do uchwały nr 437 /06 /2012 Senatu UR z dnia 21 czerwca 2012 roku EFEKTY KSZTAŁCENIA DLA KIERUNKU STUDIÓW Mechatronika poziom kształcenia profil kształcenia tytuł zawodowy absolwenta studia
Tabela odniesień efektów kierunkowych do efektów obszarowych
 Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
kierunkowy (podstawowy / kierunkowy / inny HES) obowiązkowy (obowiązkowy / nieobowiązkowy) język polski VII semestr zimowy (semestr zimowy / letni)
 obowiązkowy (obowiązkowy / nieobowiązkowy) język polski VII semestr zimowy (semestr zimowy / letni)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Impulsowe przekształtniki napięcia stałego. Włodzimierz Janke Katedra Elektroniki, Zespół Energoelektroniki
 Impulsowe przekształtniki napięcia stałego Włodzimierz Janke Katedra Elektroniki, Zespół Energoelektroniki 1 1. Wstęp 2. Urządzenia do przetwarzanie energii elektrycznej 3. Problemy symulacji i projektowania
Impulsowe przekształtniki napięcia stałego Włodzimierz Janke Katedra Elektroniki, Zespół Energoelektroniki 1 1. Wstęp 2. Urządzenia do przetwarzanie energii elektrycznej 3. Problemy symulacji i projektowania
SYLABUS/KARTA PRZEDMIOTU
 . NAZWA PRZEDMIOTU SYLABUS/KARTA PRZEDMIOTU Systemy wizyjne w automatyce przemysłowej. NAZWA JEDNOSTKI PROWADZĄCEJ PRZEDMIOT Instytut Politechniczny. STUDIA kierunek stopień tryb język status przedmiotu
. NAZWA PRZEDMIOTU SYLABUS/KARTA PRZEDMIOTU Systemy wizyjne w automatyce przemysłowej. NAZWA JEDNOSTKI PROWADZĄCEJ PRZEDMIOT Instytut Politechniczny. STUDIA kierunek stopień tryb język status przedmiotu
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Statystyka w pracy badawczej nauczyciela Wykład 4: Analiza współzależności. dr inż. Walery Susłow walery.suslow@ie.tu.koszalin.pl
 Statystyka w pracy badawczej nauczyciela Wykład 4: Analiza współzależności dr inż. Walery Susłow walery.suslow@ie.tu.koszalin.pl Statystyczna teoria korelacji i regresji (1) Jest to dział statystyki zajmujący
Statystyka w pracy badawczej nauczyciela Wykład 4: Analiza współzależności dr inż. Walery Susłow walery.suslow@ie.tu.koszalin.pl Statystyczna teoria korelacji i regresji (1) Jest to dział statystyki zajmujący
KARTA MODUŁU KSZTAŁCENIA
 KARTA MODUŁU KSZTAŁCENIA I. 1 Nazwa modułu kształcenia I. Informacje ogólne Miernictwo elektroniczne 2 Nazwa jednostki prowadzącej moduł (należy wskazać nazwę zgodnie ze Statutem PSW Instytut, Zakład)
KARTA MODUŁU KSZTAŁCENIA I. 1 Nazwa modułu kształcenia I. Informacje ogólne Miernictwo elektroniczne 2 Nazwa jednostki prowadzącej moduł (należy wskazać nazwę zgodnie ze Statutem PSW Instytut, Zakład)
Komputerowe Systemy Przemysłowe: Modelowanie - UML. Arkadiusz Banasik arkadiusz.banasik@polsl.pl
 Komputerowe Systemy Przemysłowe: Modelowanie - UML Arkadiusz Banasik arkadiusz.banasik@polsl.pl Plan prezentacji Wprowadzenie UML Diagram przypadków użycia Diagram klas Podsumowanie Wprowadzenie Języki
Komputerowe Systemy Przemysłowe: Modelowanie - UML Arkadiusz Banasik arkadiusz.banasik@polsl.pl Plan prezentacji Wprowadzenie UML Diagram przypadków użycia Diagram klas Podsumowanie Wprowadzenie Języki
Wykład z Technologii Informacyjnych. Piotr Mika
 Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Maszyny i napęd elektryczny I Kod przedmiotu
 Maszyny i napęd elektryczny I - opis przedmiotu Informacje ogólne Nazwa przedmiotu Maszyny i napęd elektryczny I Kod przedmiotu 06.2-WE-EP-MiNE1 Wydział Kierunek Wydział Informatyki, Elektrotechniki i
Maszyny i napęd elektryczny I - opis przedmiotu Informacje ogólne Nazwa przedmiotu Maszyny i napęd elektryczny I Kod przedmiotu 06.2-WE-EP-MiNE1 Wydział Kierunek Wydział Informatyki, Elektrotechniki i
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII. Roman Kaula
 POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
kierunkowy (podstawowy / kierunkowy / inny HES) nieobowiązkowy (obowiązkowy / nieobowiązkowy) język polski III semestr letni (semestr zimowy / letni)
 nieobowiązkowy (obowiązkowy / nieobowiązkowy) język polski III semestr letni (semestr zimowy / letni)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Układy elektroniczne w maszynach elektrycznych Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Układy elektroniczne w maszynach elektrycznych Nazwa modułu w języku angielskim
Podstawy Automatyki. Wykład 4 - algebra schematów blokowych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami
Wykład 4 - algebra schematów blokowych Instytut Automatyki i Robotyki Warszawa, 2015 Wstęp Schemat blokowy Schemat blokowy (strukturalny): przedstawia wzajemne powiązania pomiędzy poszczególnymi zespołami