Sterowanie Napędów Maszyn i Robotów
|
|
|
- Jadwiga Białek
- 8 lat temu
- Przeglądów:
Transkrypt
1 Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2015

2 Program Dane dotyczące przedmiotu Prowadzący:, Gmach Mechatroniki, p. 346, Strona www przedmiotu: Wykład - 16 godzin Laboratorium - 6 godzin Projektowanie - 8 godzin Informacje o przedmiocie

3 Program Warunki zaliczenia Kolokwium zaliczeniowe lub prezentacja projektu (1 kolokwium, na ostatnich zajęciach) - 30% oceny końcowej Projekt (sprawozdanie z projektu) 40% oceny końcowej Laboratorium (obecność na zajęciach laboratoryjnych jest obowiązkowa) 30% oceny końcowej Liczba punktów ECTS - 3
 30% oceny końcowej Liczba")
4 Program Cele przedmiotu Nabycie umiejętności projektowania, realizacji, uruchomienia i eksploatacji układów sterowania napędów maszyn, urządzeń mechatronicznych i robotów z uwzględnieniem zachowań statycznych i dynamicznych serwonapędów pneumotronicznych, hydrotronicznych i elektrycznych.

5 Program Tematyka wykładów WYKŁAD 1: Wprowadzenie do aktuatoryki maszyn i robotów - Aktuatoryka współczesnych maszyn i urządzeń mechatronicznych, z uwzględnieniem urządzeń stowanych w robotach. Zadania układów sterowania. Sterowanie pozycyjne: przestawianie i nadążanie oraz sterowanie siłowe (momentowe). Budowa aktuatora: serwonapęd, przekładnia, sensoryka, sterownik procesorowy. Specyfika różnych rozwiązań napędowych. Dobór serwonapędu do określonych zadań. WYKŁAD 2: Układy sterowania aktuatorów - Sterowanie zwykłe i adaptacyjne. Sterowanie proporcjonalno-całkowo-różniczkowe. Sterowanie kaskadowe. Sterowanie ze sprzężeniem zwrotnym od zmiennych stanu. Metodyka projektowania sterowania. WYKŁAD 3: Dynamika aktuatorów - Linearyzacja i upraszczanie opisu bilansowego zachowań dynamicznych. Modele z czasem ciągłym i z czasem dyskretnym. Modele predykcyjne. Modelowanie zachowań dynamicznych podstawowych serwonapędów. WYKŁAD 4: Estymacja zachowań dynamicznych aktuatorów - Identyfikacja statystyczna struktury i parametrów modelu na przykładzie wybranego serwonapędu. Konwersja parametrów estymowanego modelu dyskretnego w parametry modelu ciągłego. Realizacja identyfikacji uruchomieniowej i w trakcie normalnej pracy.

6 Program Tematyka wykładów WYKŁAD 5: Odtwarzanie zmiennych stanu - Dostępność zmiennych stanu i sposoby ich odtwarzania. Kryteria oceny jakości odtwarzania. Odtwarzanie przez różniczkowanie i obserwację. Niestandardowe metody odtwarzania zmiennych stanu. Usuwanie opóźnień odtwarzania. WYKŁAD 6: Projektowanie standardowego układu sterowania - Projektowanie układu sterowania dla wybranego serwonapęu i rodzaju sterowania. Kryteria oceny jakości sterowania. Kompensacja nieliniowości. Metody doboru nastaw sterowania. WYKŁAD 7: Optymalizacja sterowania zwykłego przez działania adaptacyjne i predykcyjne - Iteracyjna modyfikacja nastaw sterowania. Modyfikacja nastaw z zastosowaniem logiki rozmytej. Nadążanie za zadanym modelem zachowań. Predykcyjne nadążania za zadaną trajektorią parametrów. Sterowania z identyfikacją zachowań dynamicznych. Sterowanie ślizgowe. WYKŁAD 8: Realizacja, uruchomienie i eksploatacja sterowania - Implementacja procedur sterowania na przykładzie wybranego sterownika procesorowego. Procedury uruchomienia na przykładzie wybranego aktuatora. Zasady eksploatacji.

7 Program Zakres ćwiczeń laboratoryjnych Aktuator elektrohydrauliczny - Uruchomienie aktuatora elektrohydraulicznego serwonapędu tłokowego w wersji dławieniowej i objetościowej (wyporowej). Badanie wpływu obciążenia masowego na wybrany wskaźnik jakości pozycjonowania przestawnego. Aktuator elektryczny -Uruchomienie aktuatora elektrycznego serwonapędu silnikowego prądu przemiennego z falownikiem impulsowym i przekładnią ruchu obrotowego na liniowy. Badanie jakości sterowania prędkością ruchu (prędkością obrotową silnika).

8 Program Zakres ćwiczeń projektowych Dobór układu kinematycznego i kinetycznego wybranej maszyny lub robota - Analiza zachowań statycznych i dynamicznych napędzanego członu mechanizmu kinematycznego wybranej maszyny lub robota na przykładzie zadanych obciążeń masowych i siłowych oraz parametrów ruchu. Dobór aktuatora wybranego członu mechanizmu maszyny lub robota -Wybór rodzaju i dobór elementów aktuatora: silnika lub siłownika, mechanizmu przekładniowego, sensoryki i procesoryki. Szkic dokumentacji projektowej aktuatora. Wybór koncepcji i dobór nastaw układu sterowania wybranego aktuatora - Opracowanie modelu zachowań dynamicznych aktuatora. Wybór koncepcji i struktury układu sterowania. Dobór nastaw sterowania. Sprawdzenie poprawności działania układu z wykorzystaniem wybranego oprogramowania symulacyjnego.

9 Literatura Olszewski M.: Basics of servopneumatics. VDI Verlag, Duesseldorf, Olszewski M.: Sterowanie pozycyjne pneumatycznego napędu siłownikowego. OWPW, Warszawa, Osowski S.: Modelowanie i symulacja układów i procesów dynamicznych, OWPW, Warszawa, 2007 Winnicki A.: Odporne na zakłócenia ślizgowe sterowanie pozycyjne napędu elektrohydraulicznego. Rozprawa doktorska. Politechnika Warszawska, Warszawa, 2013 Heimann B., Gerth W., Popp K.: Mechatronika. Komponenty, metody, przykłady. WN PWN, Warszawa, Pełczewski W., Krynke M.: Metoda zmiennych stanu w analizie dynamiki układów napędowych. WNT, Warszawa, Pizoń A.: Elektrohydrauliczne analogowe i cyfrowe układy automatyki. WNT, Warszawa, Pritschow G.: Technika sterowania obrabiarkami i robotami przemysłowymi. OWPWr, Wrocław, Holejko D., Kościelny W.: Automatyka procesów ciągłych, Oficyna Wyd. PW, Warszawa Kaczorek T., Dzieliński A., Dąbrowski W., Łopatka R.: Podstawy teorii sterowania, WNT, Warszawa, 2013

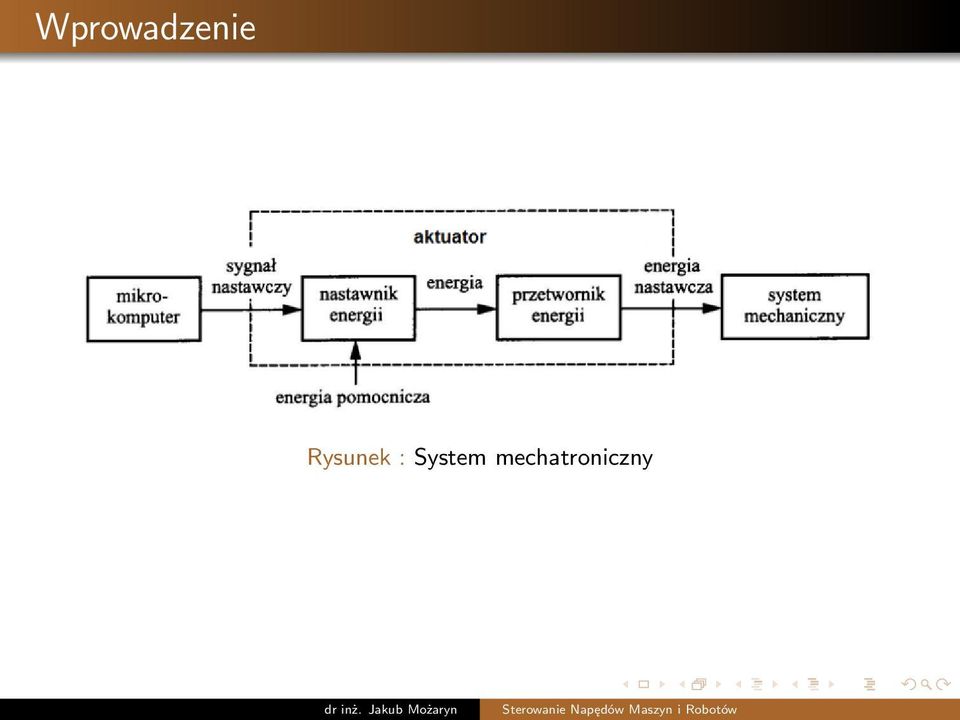
10 Wprowadzenie Aktuatoryka/aktoryka (ang. actuator - urządzenie uruchamiające, nastawnik) dziedzina mechatroniki zajmująca się budową i sterowaniem urządzeń wykonawczych, realizujących zadania ruchowe i siłowe eliminując tym samym udział człowieka w sterowaniu. Aktuator/aktor (urządzenie wykonawcze, element wykonawczy) w technice, określenie urządzenia mechanicznego, występującego w układach regulacji, które na podstawie sygnału sterującego wypracowuje sygnał wejściowy do obiektu regulacji. Do urządzeń wykonawczych można zaliczyć m.in.: w mechanice siłowniki pneumatyczne, hydrauliczne, silniki, dźwignie hydrauliczne, wzmacniacze elektrohydrauliczne, są to odpowiedniki : rąk, dłoni, nóg, palców człowieka.
 w technice, określenie urządzenia mechanicznego, występującego w układach regulacji, które na podstawie sygnału")
11 Wprowadzenie Rysunek : System mechatroniczny
12 Wprowadzenie Rysunek : Wybrane urządzenia wykonawcze

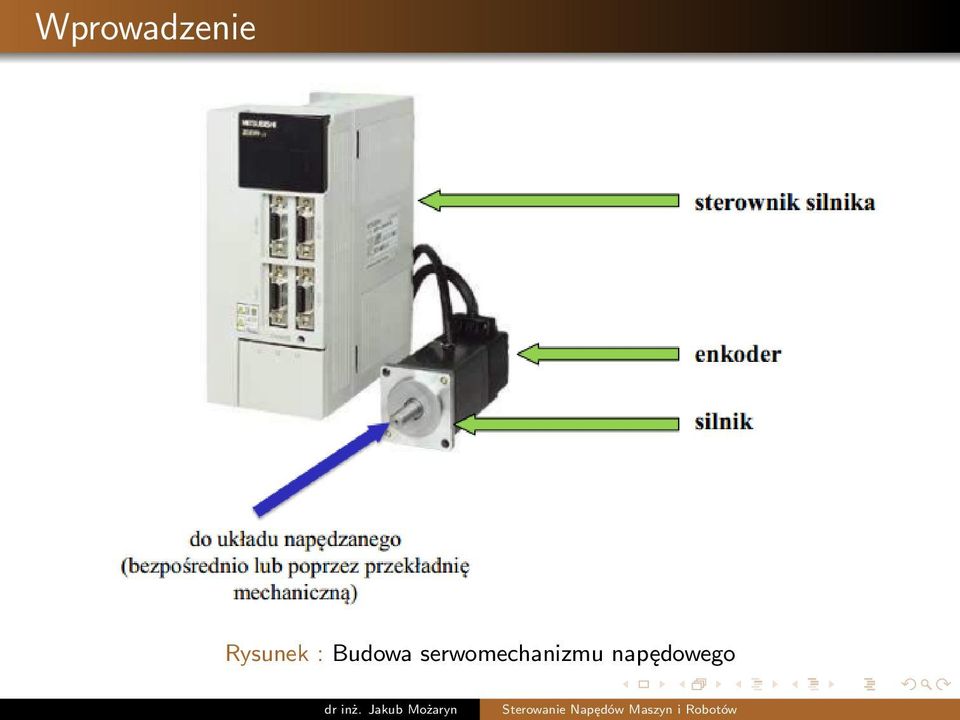
13 Wprowadzenie Rysunek : Budowa serwomechanizmu napędowego
14 Wprowadzenie Sterowanie Sterowaniem nazywa się celowe oddziaływanie na obiekt sterowania, mające doprowadzić do pożądanych zmian w procesach w nim zachodzących. Poziom energetyczny sygnałów sterujących z reguły znacznie niższy niż sygnałów, na które wpływają.

15 Wprowadzenie Zadania układów sterowania przeniesienia procedur sterowania na układ pozycyjny zestawiony ze sterownika procesorowego współpracującego z przetwornikiem (sensorem) położenia i ewentualnie innymi sensorami, pełna automatyzacja działań rozruchu i uruchomienia układu napędowego z założeniem niepełnej lub całkowitej nieznajomości przez operatora parametrów napędu, zapewnienie bezpiecznego przejścia od fazy rozruchu i uruchomienia do fazy normalnej pracy układu (zapewnienie determinowanego zachowania napędu), dobór nastaw startowych sterowania automatycznie, z założeniem nieznajomości zasad parametryzacji sterowania przez operatora (z ewentualnym wymaganiem niedopuszczenia operatora do tej czynności), odporność sterowania pozycyjnego na skokowe zmiany warunków pracy: zmiany wartości zadanych położeń i zakresów przemieszczeń, zmiany kierunku ruchu napędu, zmiany położenia układu napędowego, zmiany wartości obciążenia (masowego).
, odporność sterowania pozycyjnego na skokowe zmiany warunków pracy:")
16 Wprowadzenie Zadania układów sterowania, cd. kompensacja przez układ sterowania powolnych zmian wartości systemowych: temperatury otoczenia parametrów zasilania (wartości napięć, ciśnień itp.) właściwości ciernych napędu i napędzanego urządzenia (np.. starzenie i zanieczyszczenie smaru) zjawisk tribologicznych wywołanych postojem układu napędowego Generalnie można także powiedzieć, że ogólnym zadaniem układu sterowania jest zwiększenie globalnego zysku przedsiębiorstwa. Wyżej wymienione zadania są tylko elementami pośrednimi w realizacji tego głównego celu. Dobrze dobrany układ sterowania pozwala osiągnąć: wysoką dokładność wykonania towarów, mniejsza ilość braków, bezpieczeństwo przebiegu procesu, co znacząco wpływa zysk.
 zjawisk tribologicznych wywołanych postojem układu napędowego Generalnie można także powiedzieć, że ogólnym zadaniem układu sterowania jest")
17 Wprowadzenie Sterowanie pozycyjne (pozycjonowanie) układu napędowego jest celowym oddziaływaniem na przebieg procesu ruchu elementu ruchomego napędu dla zapewnienia żądanych zmian wartości jego położenia (drogi, pozycji, przemieszczenia liniowego lub kątowego) jako głównej wielkości sterowanej napędowego układu pozycyjnego. Rozróżnia się dwa rodzaje pozycjonowania: przestawianie przemieszczenie elementu ruchomego do pozycji zadanej, z zapewnieniem określonej jakości realizacji procesu ruchu i utrzymanie zadanej wartości położenia pozycji w czasie z określoną odchyłką ustaloną, nadążanie przemieszczanie elementu ruchomego w sposób określony zmianami wartości wielkości zadającej, z zapewnieniem określonej jakości realizacji procesu ruchu i określonej odchyłki nadążania Pomocniczymi wielkościami sterowanymi układu pozycyjnego są: prędkość, przyśpieszenie, itp., jako kolejne, fazowe, zmienne stanu.

18 Wprowadzenie Sterowanie siłowe (momentowe) Sterowanie siłowe (momentowe) jest oddziaływaniem siłowym na element napędzanego urządzenia

19 Wymagania stawiane współczesnym serwonapędom W warunkach statycznych: dysponowanie siłą lub momentem obrotowym potrzebnym do pokonania sił tarcia oraz obciążeń masowych, siłowych i momentowych dysponowanie dużym zakresem regulacji prędkości lub obrotów wykonywanie ruchu z minimalnymi przemieszczeniami (np.: od 0,1 µ m do 1 mm) ruch ze stałą prędkością (v const), także dla najmniejszych prędkości (roboczych, technologicznych, pełzania) (rzędu 1 mm/s - 5 mm/s), brak drgań - zwłaszcza ciernych (tzw. tarcia przylgowego, ang. stick slip)
 ruch ze stałą prędkością (v const), także dla najmniejszych prędkości (roboczych, technologicznych, pełzania)")
20 Wymagania stawiane współczesnym serwonapędom w warunkach dynamicznych: duże przyspieszenia (załączanie) i opóźnienia (hamowanie) ruchu dysponowanie odpowiednio dużymi momentami przyspieszenia i hamowania dokładność odtworzenia toru ruchu przy zadanych prędkościach roboczych (1 µm - 1 mm) i prędkościach jałowych (1 mm - 10 mm)
 i prędkościach")
21 Przykłady zastosowania serwonapędów Rysunek : Operowanie materiałem.
22 Przykłady zastosowania serwonapędów Rysunek : Montaż.
23 Przykłady zastosowania serwonapędów Rysunek : Cięcie na wymiar.
24 Napędy w robotyce We współczesnych robotach stosowane są 3 trzy rodzaje serwonapędów pneumatyczne, hydrauliczne, elektryczne (obecnie 50% robotów). Rysunek : Robot ATLAS - DARPA Robotics Challenge ( Każdy robot jest wyposażony w układ siłowników i przekładni rozmieszczonych odpowiednio w jego połączeniach ruchowych, tworząc układ napędowy robota.
25 Napędy w robotyce Napęd hydrauliczny, pozostaje nadal jednym z podstawowych napędów, szczególnie tam, gdzie chodzi o szybkie przemieszczanie przy znacznych obciążeniach robota. Napęd pneumatyczny wykorzystuje środowisko ściśliwe, na ogół sprężone powietrze. Zaletą tego typu napędu jest łatwość uzyskiwania powietrza do zasilania układu oraz możliwość łączenia układu z atmosferą po zakończeniu cyklu pracy. Niskie ciśnienie w porównaniu z napędem hydraulicznym czyni ten rodzaj napędu bezpiecznym w eksploatacji. Ponadto powietrze nie ma własności lepkich i ma dobre własności dynamiczne i niewielką sztywność (w porównaniu do cieczy). W pierwszej fazie rozwoju robotów przemysłowych stosowano napędy pneumatyczne i hydrauliczne. Wzrost wymagań w stosunku do robotów drugiej i wyższych generacji spowodował rozwój napędów elektrycznych. Szacuje się obecnie, że 50% robotów ma napęd elektryczny.
26 Napędy hydrauliczne Zalety: łatwość uzyskiwania dużych sił przy małych rozmiarach i ciężarach urządzeń; łatwość precyzyjnego sterowania położenia elementu wykonawczego; bardzo dobre właściwości dynamiczne. Małe momenty bezwładności części ruchomych sprawiają, że siłowniki hydrauliczne odznaczają się bardzo dużą prędkością działania; łatwość uzyskiwania ruchów jednostajnych; możliwość uzyskania małych prędkości ruchu elementu wykonawczego bez konieczności stosowania przekładni mała wrażliwość na zmiany obciążenia i przeciążenia, łatwość zabezpieczenia przed przeciążeniami; łatwość konserwacji (samoczynne smarowanie) i prostota użytkowania; duża pewność ruchowa.
27 Napędy hydrauliczne Wady: duży hałas wytwarzany przez pompę; zanieczyszczenia wywołane ewentualnym wyciekiem oleju.
28 Napędy pneumatyczne Zalety: bardzo duża pewność ruchowa; większa prostota konstrukcji w porównaniu do napędów hydraulicznych; niska cena urządzeń w porównaniu z napędem hydraulicznym; mała masa urządzeń i pomijalna masa czynnika roboczego w porównaniu z napędami hydraulicznymi; powolne narastanie sił, bardzo istotne np. przy sterowaniu chwytaków (stąd często przy hydraulicznym lub elektrycznym napędzie ramion manipulatora spotyka się napęd pneumatyczny chwytaka;) duża przeciążalność; iskrobezpieczeństwo.
29 Napędy pneumatyczne Wady: trudność uzyskiwania ruchów jednostajnych z powodu dużej ściśliwości czynnika roboczego; duża wrażliwość ruchu na zmiany obciążenia; gwałtowny rozruch, szczególnie przy małym obciążeniu; znacznie mniejsze siły i momenty aniżeli dla napędów hydraulicznych. konieczność zabezpieczania elementów przed korozją; trudność sterowania położenia elementu wykonawczego.
30 Napędy elektryczne Zalety: niska cena napędu i układu sterowania w porównaniu z napędem hydraulicznym; prostota układu zasilania; duża niezawodność; duża prostota czynności konserwacyjnych; praca bez hałasu; małe wymiary układu sterowania i zasilania.
31 Napędy elektryczne Wady: niekorzystny, w porównaniu z napędem hydraulicznym, stosunek mocy do masy urządzenia, szczególnie dla dużych mocy. Stąd też przy manipulatorach o bardzo dużym udźwigu nie stosuje się napędu elektrycznego; właściwości dynamiczne napędu elektrycznego pomimo dużego postępu w tej dziedzinie, wciąż są gorsze od właściwości dynamicznych napędu hydraulicznego; wrażliwość na długotrwałe przeciążenia, mogące doprowadzić do spalenia silnika; duże prędkości kątowe znamionowe wymagające stosowania przekładni redukcyjnych
32 Popularność napędów na rynku polskim Rysunek : Popularność napędów różnego rodzaju na rynku polskim (źródło:
33 Popularność napędów w robotyce Rysunek : Udział procentowy różnego rodzaju siłownikow stosowanych w robotach: a) rok 1977, b) rok 1990
34 Producenci napędów - hydraulika i pneumatyka Polscy producenci napędów Agromet ZEHS (cylindry hydrauliczne, Lubań), Centrum Produkcyjne Pneumatyki Prema (spółka akcyjna, pneumatyka siłowa, Kielce), Controlmatica Z AP-PNEFAL (różnorodna automatyka, w tym siłowniki, Ostrów Wielkopolski), FMB Bumar-Hydroma (cylindry i pompy hydrauliczne, Szczecin), Gramet (siłowniki i cylindry, Jelenia Góra), Hydroster (hydraulika, Gdańsk), Hydrotor (hydraulika siłowa, Tuchola), Pneumat System (siłowniki pneumatyczne, Wrocław), Ponar Wadowice (hydraulika siłowa, Wadowice), Zorin (siłowniki pneumatyczne, Dopiewo). (źródło:
35 Producenci napędów - hydraulika i pneumatyka Zagraniczni producenci napędów dostarczający produkty na rynek polski Bosch Rexroth (napędy elektryczne, hydraulika siłowa, pneumatyka, Warszawa), Festo (pneumatyka i napędy elektryczne oraz rozwiązania mechatroniczne, Janki), IMI International Oddział Norgren Herion (pneumatyka, zawory, siłowniki, Warszawa), Parker Hannifin (pneumatyka, hydraulika, zawory, pompy, Warszawa), SMC Industrial Automation (pneumatyka, hydraulika, napędy liniowe, systemy, Warszawa). (źródło:
36 Producenci napędów - napędy elektryczne Rysunek : Najpopularniejsze w Polsce marki serwosilników i serwonapędów elektrycznych (źródło:
37 Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2015
Sterowanie Napędów Maszyn i Robotów
 Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2017 Zakres wykładu 2. Zakres wykładu Dane dotyczące przedmiotu Dane dotyczące przedmiotu Prowadzący: dr inż., Gmach
Wykład 1 - Wprowadzenie, pojęcia podstawowe Instytut Automatyki i Robotyki Warszawa, 2017 Zakres wykładu 2. Zakres wykładu Dane dotyczące przedmiotu Dane dotyczące przedmiotu Prowadzący: dr inż., Gmach
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów
 Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
Wykład 3 - Metodyka projektowania sterowania. Opis bilansowy Instytut Automatyki i Robotyki Warszawa, 2015 Metodyka projektowania sterowania Zrozumienie obiektu, możliwości, ograniczeń zapoznanie się z
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 3 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Rys. 1. Udział procentowy rożnego rodzaju siłownikow stosowanych w robotach: a) rok 1977, b) rok 1990
 rok 1977, b) rok 1990") 30. Rodzaje napędów w robotyce i mechatronice. Wprowdzenie We wspołczesnych robotach stosowane są w zasadzie trzy rodzaje siłownikow, a mianowicie: pneumatyczne, hydrauliczne i elektryczne oraz ich kombinacje.
30. Rodzaje napędów w robotyce i mechatronice. Wprowdzenie We wspołczesnych robotach stosowane są w zasadzie trzy rodzaje siłownikow, a mianowicie: pneumatyczne, hydrauliczne i elektryczne oraz ich kombinacje.
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE MASZYN DRIVES AND ELEKTRO-HYDRAULIC MACHINERY CONTROL SYSTEMS Kierunek: Mechatronika Forma studiów: STACJONARNE Kod przedmiotu: S1_07 Rodzaj przedmiotu:
Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE MASZYN DRIVES AND ELEKTRO-HYDRAULIC MACHINERY CONTROL SYSTEMS Kierunek: Mechatronika Forma studiów: STACJONARNE Kod przedmiotu: S1_07 Rodzaj przedmiotu:
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE I ELEKTROPNEUMATYCZNE MASZYN Drives and electropneumatics and electrohydraulics machine control Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy
Nazwa przedmiotu: NAPĘDY I STEROWANIE ELEKTROHYDRAULICZNE I ELEKTROPNEUMATYCZNE MASZYN Drives and electropneumatics and electrohydraulics machine control Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy
Inżynieria Bezpieczeństwa I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: systemy sterowania Rodzaj zajęć: wykład, laboratorium UKŁADY AUTOMATYKI PRZEMYSŁOWEJ Industrial Automatics Systems
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: systemy sterowania Rodzaj zajęć: wykład, laboratorium UKŁADY AUTOMATYKI PRZEMYSŁOWEJ Industrial Automatics Systems
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
kierunkowy (podstawowy / kierunkowy / inny HES) obowiązkowy (obowiązkowy / nieobowiązkowy) polski pierwszy letni (semestr zimowy / letni)
 obowiązkowy (obowiązkowy / nieobowiązkowy) polski pierwszy letni (semestr zimowy / letni)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Budowa i eksploatacja napędów maszyn Nazwa modułu w języku angielskim Building
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Budowa i eksploatacja napędów maszyn Nazwa modułu w języku angielskim Building
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Rok akademicki: 2013/2014 Kod: RAR s Punkty ECTS: 5. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Układy napędowe maszyn - opis przedmiotu
 Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Układy napędowe maszyn - opis przedmiotu Informacje ogólne Nazwa przedmiotu Układy napędowe maszyn Kod przedmiotu 06.1-WM-MiBM-P-59_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa maszyn
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Projektowanie siłowych układów hydraulicznych - opis przedmiotu
 Projektowanie siłowych układów hydraulicznych - opis przedmiotu Informacje ogólne Nazwa przedmiotu Projektowanie siłowych układów hydraulicznych Kod przedmiotu 06.1-WM-MiBM-MiUW-P-15_15 Wydział Kierunek
Projektowanie siłowych układów hydraulicznych - opis przedmiotu Informacje ogólne Nazwa przedmiotu Projektowanie siłowych układów hydraulicznych Kod przedmiotu 06.1-WM-MiBM-MiUW-P-15_15 Wydział Kierunek
AiR_TR2_5/9 Teoria Regulacji II Control Theory II. Automatyka i Robotyka I stopień ogólno akademicki studia stacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Elektrotechnika I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
AiR_TR2_5/9 Teoria Regulacji II Control Theory II. Automatyka i Robotyka I stopień ogólno akademicki studia niestacjonarne
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU AiR_TR2_5/9 Teoria Regulacji II Control Theory II Kod modułu Nazwa modułu Nazwa modułu w języku angielskim
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
znajdują się w pozycji środkowej dla unieruchomionych siłowników. Pozycję tę uważa się za odpowiadającą wyłączeniu przełącznika;
 Rys. 25. Przełączniki suwakowe trójpołożeniowe czterodrogowe różnych typów i ich symbole (pod nimi) 1-upust, 2-do prawej strony cylindra siłownika, 3-zasilanie, 4-do lewej strony cylindra siłownika. Suwaki
Rys. 25. Przełączniki suwakowe trójpołożeniowe czterodrogowe różnych typów i ich symbole (pod nimi) 1-upust, 2-do prawej strony cylindra siłownika, 3-zasilanie, 4-do lewej strony cylindra siłownika. Suwaki
Materiały dydaktyczne. Semestr IV. Laboratorium
 Materiały dydaktyczne Napędy hydrauliczne Semestr IV Laboratorium 1 1. Zagadnienia realizowane na zajęciach laboratoryjnych Zagadnienia według treści zajęć dydaktycznych: Podstawowe rodzaje napędowych
Materiały dydaktyczne Napędy hydrauliczne Semestr IV Laboratorium 1 1. Zagadnienia realizowane na zajęciach laboratoryjnych Zagadnienia według treści zajęć dydaktycznych: Podstawowe rodzaje napędowych
EiT_S_I_RwM_EM Robotyka w medycynie Robotics in Medicine
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
SYSTEMY ENERGETYKI ODNAWIALNEJ
 SYSTEMY ENERGETYKI ODNAWIALNEJ Wykład: Układy sterowania i regulacji w energetyce Prowadzący: dr inż. Marcin Michalski kontakt: e-mail: energetyka.michalski@gmail.com energetyka.michalski Slajd 1 ZASADY
SYSTEMY ENERGETYKI ODNAWIALNEJ Wykład: Układy sterowania i regulacji w energetyce Prowadzący: dr inż. Marcin Michalski kontakt: e-mail: energetyka.michalski@gmail.com energetyka.michalski Slajd 1 ZASADY
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Rok akademicki: 2012/2013 Kod: EIB BR-s Punkty ECTS: 3. Kierunek: Inżynieria Biomedyczna Specjalność: Biomechanika i robotyka
 Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-8 STANOWISKO BADANIA POZYCJONOWANIA PNEUMATYCZNEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
Karta (sylabus) przedmiotu
 przedmiotu") WM Karta (sylabus) przedmiotu Mechanika i Budowa Maszyn Studia I stopnia o profilu: A P Przedmiot: Pneumatyka z hydrauliką Kod przedmiotu Status przedmiotu: MBM N 0 6 54-0_0 Język wykładowy: polski Rok:
WM Karta (sylabus) przedmiotu Mechanika i Budowa Maszyn Studia I stopnia o profilu: A P Przedmiot: Pneumatyka z hydrauliką Kod przedmiotu Status przedmiotu: MBM N 0 6 54-0_0 Język wykładowy: polski Rok:
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy Rodzaj zajęć: wykład, laboratorium Automatyka Automatics Forma studiów: studia stacjonarne Poziom kwalifikacji: I stopnia Liczba
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Przenośniki Układy napędowe
 Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Przenośniki układy napędowe Katedra Maszyn Górniczych, Przeróbczych i Transportowych AGH Przenośniki Układy napędowe Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (12617) 30 74 B-2 parter p.6 konsultacje:
Teoria maszyn i mechanizmów Kod przedmiotu
 Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
Wprowadzenie. - Napęd pneumatyczny. - Sterowanie pneumatyczne
 Wprowadzenie Pneumatyka - dziedzina nauki i techniki zajmująca się prawami rządzącymi przepływem sprężonego powietrza; w powszechnym rozumieniu także technika napędu i sterowania pneumatycznego. Zastosowanie
Wprowadzenie Pneumatyka - dziedzina nauki i techniki zajmująca się prawami rządzącymi przepływem sprężonego powietrza; w powszechnym rozumieniu także technika napędu i sterowania pneumatycznego. Zastosowanie
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Rok akademicki: 2015/2016 Kod: RBM ET-s Punkty ECTS: 3. Poziom studiów: Studia II stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Układy hydrauliczne w pojazdach Rok akademicki: 2015/2016 Kod: RBM-2-108-ET-s Punkty ECTS: 3 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechanika i Budowa Maszyn Specjalność: Eksploatacja
Nazwa modułu: Układy hydrauliczne w pojazdach Rok akademicki: 2015/2016 Kod: RBM-2-108-ET-s Punkty ECTS: 3 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechanika i Budowa Maszyn Specjalność: Eksploatacja
BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
PROJEKTOWANIE MECHATRONICZNE
 Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: Projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PROJEKT INŻYNIERSKI Engineer s project
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: Projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PROJEKT INŻYNIERSKI Engineer s project
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Sterowanie napędów maszyn i robotów
 Wykład 8 - zaawansowane układy sterowania Instytut Automatyki i Robotyki Warszawa, 2014 adaptacyjne (ang. adaptive control) z dostosowaniem się do aktualnych warunków pracy napędu - koncepcje: ze wstępnie
Wykład 8 - zaawansowane układy sterowania Instytut Automatyki i Robotyki Warszawa, 2014 adaptacyjne (ang. adaptive control) z dostosowaniem się do aktualnych warunków pracy napędu - koncepcje: ze wstępnie
Seria Jubileuszowa. Rozwiązania informatyczne. Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości. oszczędność energii. ochrona środowiska
 Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
Nazwa przedmiotu: Kierunek: ENERGETYKA Rodzaj przedmiotu: kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Zapoznanie studentów z własnościami
BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
Elektronika i Telekomunikacja I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu EiT_S_I_RE_AEwT Nazwa modułu Regulatory elektroniczne Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu EiT_S_I_RE_AEwT Nazwa modułu Regulatory elektroniczne Nazwa modułu w języku angielskim
Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa. Instrukcja do zajęć laboratoryjnych
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie własności statycznych siłowników pneumatycznych Ćwiczenie
S Y L A B U S P R Z E D M I O T U. Urządzenia wykonawcze Actuators, design and function
 "Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki Prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: Podstawowa jednostka organizacyjna
"Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki Prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: Podstawowa jednostka organizacyjna
Egzamin / zaliczenie na ocenę*
 Zał. nr 4 do ZW /01 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : AUTOMATYKA I ROBOTYKA Nazwa w języku angielskim: AUTOMATION AND ROBOTICS Kierunek studiów (jeśli dotyczy):
Zał. nr 4 do ZW /01 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : AUTOMATYKA I ROBOTYKA Nazwa w języku angielskim: AUTOMATION AND ROBOTICS Kierunek studiów (jeśli dotyczy):
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 3 Dobór silnika skokowego do pracy w obszarze rozruchowym
 Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
Napędy urządzeń mechatronicznych - projektowanie Dobór silnika skokowego do pracy w obszarze rozruchowym Precyzyjne pozycjonowanie (Velmix 2007) Temat ćwiczenia - stolik urządzenia technologicznego (Szykiedans,
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁO NAPĘD I STEROWANIE PNEUMATCZNE PODSTAW ĆWICZENIA LABORATORJNE Układy elektropneumatyczne Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki kopiowanie,
PIOTR PAWEŁO NAPĘD I STEROWANIE PNEUMATCZNE PODSTAW ĆWICZENIA LABORATORJNE Układy elektropneumatyczne Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki kopiowanie,
Rok I, semestr I (zimowy)
") Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2012/2013 Rok I,
Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2012/2013 Rok I,
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Komputerowe wspomaganie projektowania urządzeń płynowych Computer aided design of fluid systems
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
nr projektu w Politechnice Śląskiej 11/030/FSD18/0222 KARTA PRZEDMIOTU
 Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Wprowadzenie. Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego.
 Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO
 USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO Przykład zintegrowanego systemu mechatronicznego Michał Bartyś Wprowadzenie Schemat blokowy Funkcje ustawnika Model przyczynowo-skutkowy Środowisko
USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO Przykład zintegrowanego systemu mechatronicznego Michał Bartyś Wprowadzenie Schemat blokowy Funkcje ustawnika Model przyczynowo-skutkowy Środowisko
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: NAPĘDY I STEROWANIE PNEUMATYCZNE MASZYN PNEUMATIC DRIVE AND CONTROL OF MACHINES Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
Nazwa przedmiotu: NAPĘDY I STEROWANIE PNEUMATYCZNE MASZYN PNEUMATIC DRIVE AND CONTROL OF MACHINES Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: PROJEKTOWANIE SYSTEMÓW MECHANICZNYCH
Cel zajęć: Program zajęć:
 KIERUNEK STUDIÓW: ELEKTROTECHNIKA I stopień NAZWA PRZEDMIOTU: NAPĘD ELEKTRYCZNY (dzienne: 30h - wykład, 0h - ćwiczenia rachunkowe, 30h - laboratorium) Semestr: W Ć L P S VI 2 2 Cel zajęć: Celem zajęć jest
KIERUNEK STUDIÓW: ELEKTROTECHNIKA I stopień NAZWA PRZEDMIOTU: NAPĘD ELEKTRYCZNY (dzienne: 30h - wykład, 0h - ćwiczenia rachunkowe, 30h - laboratorium) Semestr: W Ć L P S VI 2 2 Cel zajęć: Celem zajęć jest
Badanie powtarzalności pozycjonowania robota IRp-6
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie powtarzalności pozycjonowania robota IRp-6 opracował: dr inż. Paweł Cegielski Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Automatyzacja
NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY
 PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Układy pneumatyczne z zaworami sekwencyjnymi Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki
PIOTR PAWEŁKO NAPĘD I STEROWANIE PNEUMATYCZNE PODSTAWY ĆWICZENIA LABORATORYJNE Układy pneumatyczne z zaworami sekwencyjnymi Materiały przeznaczone są dla studentów Wydziału Inżynierii Mechanicznej i Mechatroniki
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Urządzenia i systemy automatyki. Elektrotechnika I stopień ogólno akademicki. niestacjonarne. przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Automatics systems and devices Obowiązuje
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Automatics systems and devices Obowiązuje
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika UKŁADY NAPĘDOWE MASZYN I URZĄDZEO Drive systems of machines and devices Forma studiów: stacjonarne Kod przedmiotu: B04 Rodzaj przedmiotu: obowiązkowy dla kierunku
Nazwa przedmiotu: Kierunek: Mechatronika UKŁADY NAPĘDOWE MASZYN I URZĄDZEO Drive systems of machines and devices Forma studiów: stacjonarne Kod przedmiotu: B04 Rodzaj przedmiotu: obowiązkowy dla kierunku
Rok I, semestr I (zimowy)
") Instytut Nauk Technicznych, PWSZ w Nysie Kierunek: Zarządzanie i Inżynieria Produkcji studia niestacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego
Instytut Nauk Technicznych, PWSZ w Nysie Kierunek: Zarządzanie i Inżynieria Produkcji studia niestacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Rok I, semestr I (zimowy)
") Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2014/2015 Rok I,
Instytut Zarządzania, PWSZ w Nysie Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2014/2015 Rok I,
Podstawy mechatroniki Mechatronics basic
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Urządzenia i systemy automatyki. Elektrotechnika I stopień ogólno akademicki. stacjonarne. przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Automatics systems and devices Obowiązuje
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Automatics systems and devices Obowiązuje
Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy. Obowiązkowy Polski VI semestr zimowy
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium, projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium, projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU WYMAGANIA WSTĘPNE W ZAKRESIE WIEDZY, UMIEJĘTNOŚCI I INNYCH KOMPETENCJI EFEKTY KSZTAŁCENIA
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 2 2. Kod przedmiotu: Ro2 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 2 2. Kod przedmiotu: Ro2 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
Rok I, semestr I (zimowy)
") Instytut Nauk Technicznych, PWSZ w Nysie Kierunek: Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2016/2017
Instytut Nauk Technicznych, PWSZ w Nysie Kierunek: Zarządzanie i Inżynieria Produkcji studia stacjonarne w systemie Specjalność: automatyzacja produkcji i systemy mechatroniczne Od roku akademickiego 2016/2017
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: OKRĘTOWA HYDRAULIKA SIŁOWA 2. Kod przedmiotu: Sh 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność: Eksploatacja
I. KARTA PRZEDMIOTU. Nazwa przedmiotu: OKRĘTOWA HYDRAULIKA SIŁOWA 2. Kod przedmiotu: Sh 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechanika i budowa maszyn 5. Specjalność: Eksploatacja
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński