Sterowane adaptacyjne maszyn wieloosiowych z wykorzystaniem. Marcin Paprocki
|
|
|
- Henryka Górecka
- 8 lat temu
- Przeglądów:
Transkrypt
1 Sterowane adaptacyjne maszyn wieloosiowych z wykorzystaniem elementów sztucznej inteligencji Marcin Paprocki

2 Plan prezentacji Wstęp Błędy odzwierciedlenia zadanej trajektorii ruchu Przyczyny powstawania błędów Sposoby minimalizacji błędów Teza robocza Proponowany układ sterowania maszyn numerycznych Spodziewane wyniki

3 Błędy realizacji zadanej trajektorii ruchu występujące w maszynach wieloosiowych Błędy nadążania - powstają na skutek zbyt szybkiej (wolnej) realizacji zadanego przemieszczenia dla danej osi mechanicznej, Błędów odwzorowania (konturu) - różnica pomiędzy zadanym (żądanym), a aktualnym położeniem osi.
 - różnica pomiędzy zadanym (żądanym), a aktualnym")
4 Błędy nadąŝania Błędy odwzorowania (konturu)

5 Przyczyny powstawanie błędów odzwierciedlenia zadanej trajektorii ruchu niedoskonałość układów regulacji serwonapędów, mająca swe źródło w nieidealnych elementach konstrukcyjnych silników oraz niedoskonałych układach pomiarowych i układach regulacji, błędy w wykonaniu elementów konstrukcyjnych przekładające się na brak idealnej synchronizacji pomiędzy osiami mechanicznymi maszyn, zjawisko tarcia nieliniowego dla małych prędkości posuwu osi mechanicznych, sprężystość elementów mechanicznych maszyn, zmiany kształtów elementów maszyny pod wpływem ciepła wydzielanego w czasie pracy maszyny na skutek tarcia,

6 Przyczyny powstawanie błędów odzwierciedlenia zadanej trajektorii ruchu działanie sił skrawania i oporów ruchu, powodujących deformację elementów konstrukcyjnych maszyny, osiąganie granicznych prędkości i przyspieszeń posuwu wynikających z własności układów napędowych i konstrukcyjnych maszyn. zużycie elementów konstrukcyjnych(np. łożysk)

7 Sposoby zmniejszania błędów trajektorii ruchu Zmniejszanie błędów nadążania w układach sterowania można realizować poprzez: optymalizację nastaw regulatorów, zastosowanie regulatorów ze sprzężeniem do przodu FF(ang. Feed Forward), z czego wyróżnić można: regulator z zerowym przesunięciem fazowym ZPETC(ang. Zero Phase Terror Tracking Control), filtr z odwróconą kompensacją IKF (ang. Inverse Compensation Filter), zastosowanie sterowania skośnego CCC (ang. Cross Coupling Control).
, filtr z odwróconą kompensacją IKF (ang.")
8 TEZA ROBOCZA W proponowanym układzie sterowania maszyn wieloosiowych z elementami sztucznej inteligencji istnieje możliwość zmniejszenia błędów odzwierciedlenia zadanej trajektorii ruchu i poprawienia dokładności wykonania obrabianych elementów.

9 W proponowanym układzie sterowania zamierza się zaimplementować: układy wektorów sprzężeń do przodu, opartych na działaniu członów sprzężonych do przodu (ang. Feed Forward), kompensujących błędy nadążania poszczególnych osi mechanicznych, Inteligentny blok kompensacji błędów konturu, zawierający w swoich strukturach elementy sztucznej inteligencji, których działanie minimalizowałoby błąd konturu realizowanej trajektorii ruchu.

10
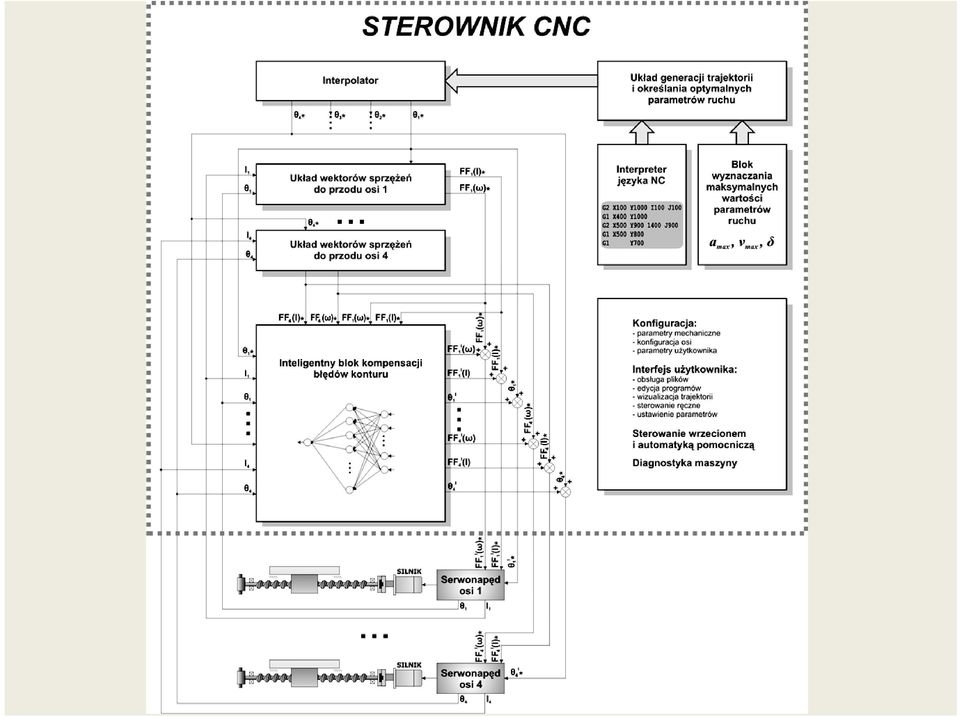
11 Budowa układu sterowania CNC
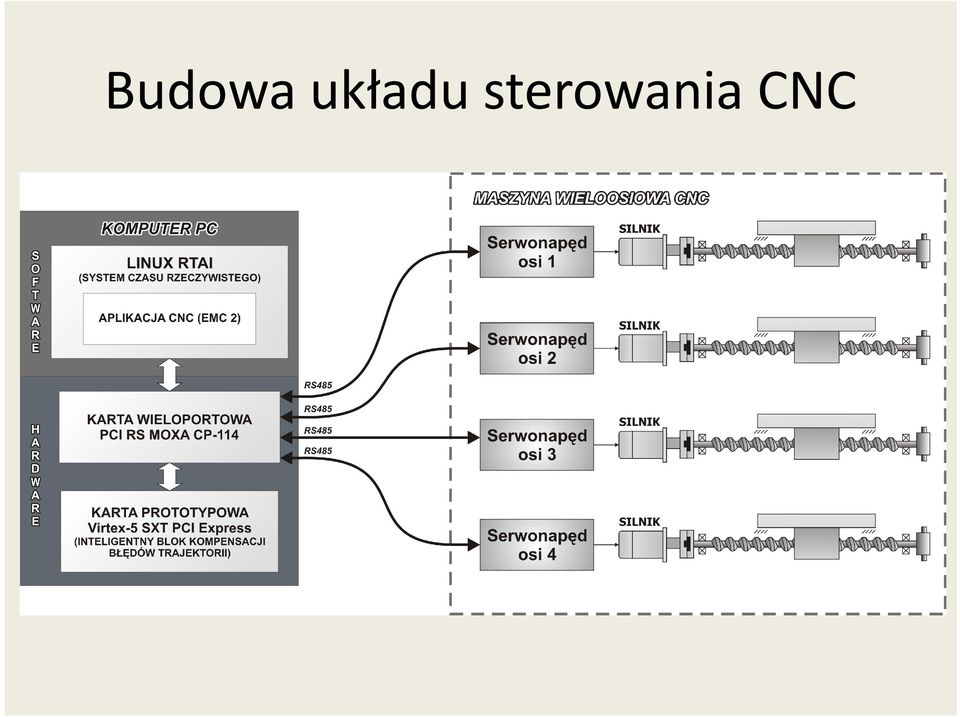
12 Karta prototypowa -Virtex-5SXT PCI Express Specyfikacja: Xilinx XC5VSX95T-1FF1136 Virtex-5 FPGA Eight LEDs One 8-position DIP switch Four push-button switches Two programmable LVDS clock generators On-board 100 MHz LVTTL oscillator On-board LVTTL oscillator socket LCD panel EXP expansion slot Multiple GTP Interfaces (PCI Express x8 interface, Two SFP connectors, SATA host, CX4) 64 MB DDR2 SDRAM 128 MB DDR2 SODIMM socket 16 MB Flash RS-232 serial port Cypress USB 2.0 Two GbE PHYs System ACE Xilinx XCF32P Platform Flash JTAG interface BPI configuration support

13 Spodziewane wyniki Znacząca minimalizacja błędów konturu poprzez: kompensację błędów występujących w układach regulacji serwonapędów, minimalizację wpływu zjawiska tarcia nieliniowego dla małych prędkości posuwu osi mechanicznych, minimalizację wpływu działania sił skrawania i oporów ruchu.

14 Docelowy prototyp układu sterowania, charakteryzować się będzie bardzo dużą uniwersalności oraz elastycznością pod względem zastosowania. Możliwe będzie zastosowanie go w układach sterowania obrabiarek numerycznych jaki i różnego rodzaju wieloosiowych maszynach manipulacyjnych i urządzeniach technologicznych.

15 DZIĘKUJĘ ZA UWAGĘ
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Opis przedmiotu zamówienia CZĘŚĆ 1
 Opis przedmiotu zamówienia CZĘŚĆ 1 Stanowiska do badań algorytmów sterowania interfejsów energoelektronicznych zasobników energii bazujących na układach programowalnych FPGA. Stanowiska laboratoryjne mają
Opis przedmiotu zamówienia CZĘŚĆ 1 Stanowiska do badań algorytmów sterowania interfejsów energoelektronicznych zasobników energii bazujących na układach programowalnych FPGA. Stanowiska laboratoryjne mają
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
3/13/2012. Automatyka i Sterowanie PRz Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński. Odśrodkowy regulator prędkości
 Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Symulacja komputerowa i obróbka części 5 na frezarce sterowanej numerycznie
 LABORATORIUM TECHNOLOGII Symulacja komputerowa i obróbka części 5 na frezarce sterowanej numerycznie Przemysław Siemiński, Cel ćwiczenia: o o o o o zapoznanie z budową i działaniem frezarek CNC, przegląd
LABORATORIUM TECHNOLOGII Symulacja komputerowa i obróbka części 5 na frezarce sterowanej numerycznie Przemysław Siemiński, Cel ćwiczenia: o o o o o zapoznanie z budową i działaniem frezarek CNC, przegląd
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu
 Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
Badanie kaskadowego układu regulacji na przykładzie serwomechanizmu 1. WSTĘP Serwomechanizmy są to przeważnie układy regulacji położenia. Są trzy główne typy zadań serwomechanizmów: - ruch point-to-point,
POLITECHNIKA WARSZAWSKA. Wydział Elektryczny ROZPRAWA DOKTORSKA
 POLITECHNIKA WARSZAWSKA Wydział Elektryczny ROZPRAWA DOKTORSKA mgr inż. Marcin Paprocki Sterowanie adaptacyjne maszyn wieloosiowych z wykorzystaniem elementów sztucznej inteligencji Promotor prof. dr hab.
POLITECHNIKA WARSZAWSKA Wydział Elektryczny ROZPRAWA DOKTORSKA mgr inż. Marcin Paprocki Sterowanie adaptacyjne maszyn wieloosiowych z wykorzystaniem elementów sztucznej inteligencji Promotor prof. dr hab.
Układy programowalne. Wykład z ptc część 5
 Układy programowalne Wykład z ptc część 5 Pamięci ROM Pamięci stałe typu ROM (Read only memory) umożliwiają jedynie odczytanie informacji zawartej w strukturze pamięci. Działanie: Y= X j *cs gdzie j=linia(a).
Układy programowalne Wykład z ptc część 5 Pamięci ROM Pamięci stałe typu ROM (Read only memory) umożliwiają jedynie odczytanie informacji zawartej w strukturze pamięci. Działanie: Y= X j *cs gdzie j=linia(a).
KWALIFIKACYJNY KURS ZAWODOWY 2016 / 2017 PLAN ZAJĘĆ. 15:30 17:55 BHP Błażyca Wojciech 18:05 20:30 Język obcy zawodowy Antonik Dorota
 1 Zawód: Operator obrabiarek skrawających KWALIFIKACYJNY KURS ZAWODOWY 2016 / 2017 Kwalifikacja: M.19 Użytkowanie obrabiarek skrawających PLAN ZAJĘĆ DATA ZAJĘCIA Nauczyciel 9 września 10 września 16 września
1 Zawód: Operator obrabiarek skrawających KWALIFIKACYJNY KURS ZAWODOWY 2016 / 2017 Kwalifikacja: M.19 Użytkowanie obrabiarek skrawających PLAN ZAJĘĆ DATA ZAJĘCIA Nauczyciel 9 września 10 września 16 września
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Panele operatorskie seria CIMON-Xpanel
 Panele operatorskie seria CIMON-Xpanel Wyświetlacz TFT LCD, 16,7 mln kolorów, przekątna 6,4, rozdzielczość 480x272 CM-XT04CA CM-XT04CA-D SDRAM: 64 MB, 1 port RS232, 1 port RS422/485, 1 port USB Host, 1
Panele operatorskie seria CIMON-Xpanel Wyświetlacz TFT LCD, 16,7 mln kolorów, przekątna 6,4, rozdzielczość 480x272 CM-XT04CA CM-XT04CA-D SDRAM: 64 MB, 1 port RS232, 1 port RS422/485, 1 port USB Host, 1
Podstawy technik wytwarzania PTWII - projektowanie. Ćwiczenie 4. Instrukcja laboratoryjna
 PTWII - projektowanie Ćwiczenie 4 Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Warszawa 2011 2 Ćwiczenie
PTWII - projektowanie Ćwiczenie 4 Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Warszawa 2011 2 Ćwiczenie
Procesory w FPGA H D L. dr inż. Paweł Tomaszewicz Instytut Telekomunikacji Politechnika Warszawska
 Procesory w FPGA 1 System w FPGA SOPC - System on a Programmable Chip System mikroprocesorowy w układzie programowalnym: softprocesor zrealizowany w logice układu FPGA NIOS2 Altera Microblaze Xilinx OpenRISC
Procesory w FPGA 1 System w FPGA SOPC - System on a Programmable Chip System mikroprocesorowy w układzie programowalnym: softprocesor zrealizowany w logice układu FPGA NIOS2 Altera Microblaze Xilinx OpenRISC
Układy programowalne. Wykład z ptc część 5
 Układy programowalne Wykład z ptc część 5 Pamięci ROM Pamięci stałe typu ROM (Read only memory) umożliwiają jedynie odczytanie informacji zawartej w strukturze pamięci. Działanie: Y= X j *cs gdzie j=linia_pamięci(a).
Układy programowalne Wykład z ptc część 5 Pamięci ROM Pamięci stałe typu ROM (Read only memory) umożliwiają jedynie odczytanie informacji zawartej w strukturze pamięci. Działanie: Y= X j *cs gdzie j=linia_pamięci(a).
Budowa, programowanie i eksploatacja obrabiarek CNC - opis przedmiotu
 Budowa, programowanie i eksploatacja obrabiarek CNC - opis przedmiotu Informacje ogólne Nazwa przedmiotu Budowa, programowanie i eksploatacja obrabiarek CNC Kod przedmiotu 06.1-WM-MiBM-EM-P-01_15 Wydział
Budowa, programowanie i eksploatacja obrabiarek CNC - opis przedmiotu Informacje ogólne Nazwa przedmiotu Budowa, programowanie i eksploatacja obrabiarek CNC Kod przedmiotu 06.1-WM-MiBM-EM-P-01_15 Wydział
SYSTEMY MES W MECHANICE
 SPECJALNOŚĆ SYSTEMY MES W MECHANICE Drugi stopień na kierunku MECHANIKA I BUDOWA MASZYN Instytut Mechaniki Stosowanej PP http://www.am.put.poznan.pl Przedmioty specjalistyczne będą prowadzone przez pracowników:
SPECJALNOŚĆ SYSTEMY MES W MECHANICE Drugi stopień na kierunku MECHANIKA I BUDOWA MASZYN Instytut Mechaniki Stosowanej PP http://www.am.put.poznan.pl Przedmioty specjalistyczne będą prowadzone przez pracowników:
Wpływ tarcia na serwomechanizmy
 Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Wpływ tarcia na serwomechanizmy Zakłócenia oddziałujące na serwomechanizm Siły potencjalne/grawitacji, Tarcie, Zmienny moment bezwładności, Zmienny moment obciążenia Tarcie Zjawisko to znane jest od bardzo
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Kurs: Programowanie i obsługa obrabiarek sterowanych numerycznie - CNC
 Kurs: Programowanie i obsługa obrabiarek sterowanych numerycznie - CNC Liczba godzin: 40; koszt 1200zł Liczba godzin: 80; koszt 1800zł Cel kursu: Nabycie umiejętności i kwalifikacji operatora obrabiarek
Kurs: Programowanie i obsługa obrabiarek sterowanych numerycznie - CNC Liczba godzin: 40; koszt 1200zł Liczba godzin: 80; koszt 1800zł Cel kursu: Nabycie umiejętności i kwalifikacji operatora obrabiarek
PROJEKTOWANIE MECHATRONICZNE UKŁADY NAPĘDOWE OBRABIAREK
 PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
PROJEKTOWANIE MECHATRONICZNE na przykładzie obrabiarek Dr hab. inż. Piotr Pawełko p. 141 Piotr.Pawelko@zut.edu.pl www.piopawelko.zut.edu.pl Wśród układów napędowych obrabiarek można rozróżnić napędy główne
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Mechaniczny obowiązuje studentów rozpoczynających studia w roku akademickim 2015/2016 Kierunek studiów: Mechanika i Budowa Maszyn
Opis przedmiotu zamówienia
 Opis przedmiotu zamówienia Stanowiska do badań algorytmów sterowania interfejsów energoelektronicznych zasobników energii bazujących na układach programowalnych FPGA. Stanowiska laboratoryjne mają służyć
Opis przedmiotu zamówienia Stanowiska do badań algorytmów sterowania interfejsów energoelektronicznych zasobników energii bazujących na układach programowalnych FPGA. Stanowiska laboratoryjne mają służyć
INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 Katedra Technik Wytwarzania i Automatyzacji WYDZIAŁ BUDOWY MASZYN I LOTNICTWA INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Przedmiot: DIAGNOSTYKA I NADZOROWANIE SYSTEMÓW OBRÓBKOWYCH Temat: Pomiar charakterystyk
Katedra Technik Wytwarzania i Automatyzacji WYDZIAŁ BUDOWY MASZYN I LOTNICTWA INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Przedmiot: DIAGNOSTYKA I NADZOROWANIE SYSTEMÓW OBRÓBKOWYCH Temat: Pomiar charakterystyk
CZAS WYKONANIA BUDOWLANYCH ELEMENTÓW KONSTRUKCJI STALOWYCH OBRABIANYCH METODĄ SKRAWANIA A PARAMETRY SKRAWANIA
 Budownictwo 16 Piotr Całusiński CZAS WYKONANIA BUDOWLANYCH ELEMENTÓW KONSTRUKCJI STALOWYCH OBRABIANYCH METODĄ SKRAWANIA A PARAMETRY SKRAWANIA Wprowadzenie Rys. 1. Zmiana całkowitych kosztów wytworzenia
Budownictwo 16 Piotr Całusiński CZAS WYKONANIA BUDOWLANYCH ELEMENTÓW KONSTRUKCJI STALOWYCH OBRABIANYCH METODĄ SKRAWANIA A PARAMETRY SKRAWANIA Wprowadzenie Rys. 1. Zmiana całkowitych kosztów wytworzenia
Komp m u p t u ery w bu b d u o d wane Cezary Ziółkowski
 Komputery wbudowane Cezary Ziółkowski Agenda Komputery wbudwane MOXA Platforma RCore oraz oprogramowanie Moxa Device Manager Podsumowanie Komputery wbudowane MOXA Komputery wbudowane MOXA Seria DA-660
Komputery wbudowane Cezary Ziółkowski Agenda Komputery wbudwane MOXA Platforma RCore oraz oprogramowanie Moxa Device Manager Podsumowanie Komputery wbudowane MOXA Komputery wbudowane MOXA Seria DA-660
MODELOWANIE ODKSZTAŁCEŃ CIEPLNYCH OSI POSUWÓW SZYBKICH METODĄ ELEMENTÓW SKOŃCZONYCH
 MODELOWANIE INŻYNIERSKIE ISNN 1896-771X 32, s. 339-344, Gliwice 2006 MODELOWANIE ODKSZTAŁCEŃ CIEPLNYCH OSI POSUWÓW SZYBKICH METODĄ ELEMENTÓW SKOŃCZONYCH KRZYSZTOF LEHRICH JAN KOSMOL Katedra Budowy Maszyn,
MODELOWANIE INŻYNIERSKIE ISNN 1896-771X 32, s. 339-344, Gliwice 2006 MODELOWANIE ODKSZTAŁCEŃ CIEPLNYCH OSI POSUWÓW SZYBKICH METODĄ ELEMENTÓW SKOŃCZONYCH KRZYSZTOF LEHRICH JAN KOSMOL Katedra Budowy Maszyn,
Centra. tokarskie DUGARD 300P / 300MC. ze skośnym łożem DUGARD. www.jafo.com.pl
 Centra tokarskie DUGARD 300P / 300MC ze skośnym łożem DUGARD www.jafo.com.pl Dokładne toczenie i niższe koszty produkcyjne! Tokarka skonstruowana z myślą o produktywności i niezawodności. Teraz można realizować
Centra tokarskie DUGARD 300P / 300MC ze skośnym łożem DUGARD www.jafo.com.pl Dokładne toczenie i niższe koszty produkcyjne! Tokarka skonstruowana z myślą o produktywności i niezawodności. Teraz można realizować
REINECKER RS 500 CNC elastyczna obróbka półfabrykatów narzędzi metodą wzdłużną, wcinającą i ciągu konturów
 Szlifierka do powierzchni obrotowych REINECKER RS 500 CNC elastyczna obróbka półfabrykatów narzędzi metodą wzdłużną, wcinającą i ciągu konturów MY BUDUJEMY SZLIFIERKI REINECKER RS Na szlifierce do powierzchni
Szlifierka do powierzchni obrotowych REINECKER RS 500 CNC elastyczna obróbka półfabrykatów narzędzi metodą wzdłużną, wcinającą i ciągu konturów MY BUDUJEMY SZLIFIERKI REINECKER RS Na szlifierce do powierzchni
1. Charakterystyka układu napędowego
 1. Charakterystyka układu napędowego PLC DSP IGBT HF...C Współczesny układ napędowy zawiera wiele sprzężeń zwrotnych jest zatem układem regulowanym 1 Prosty UKŁAD NAPĘDOWY informatyka przemysłowa zewn.
1. Charakterystyka układu napędowego PLC DSP IGBT HF...C Współczesny układ napędowy zawiera wiele sprzężeń zwrotnych jest zatem układem regulowanym 1 Prosty UKŁAD NAPĘDOWY informatyka przemysłowa zewn.
Przedmiotowy system oceniania - kwalifikacja M19. Podstawy konstrukcji maszyn. Przedmiot: Technologia naprawy elementów maszyn narzędzi i urządzeń
 Przedmiotowy system oceniania - kwalifikacja M19 KL II i III TM Podstawy konstrukcji maszyn nauczyciel Andrzej Maląg Przedmiot: Technologia naprawy elementów maszyn narzędzi i urządzeń CELE PRZEDMIOTOWEGO
Przedmiotowy system oceniania - kwalifikacja M19 KL II i III TM Podstawy konstrukcji maszyn nauczyciel Andrzej Maląg Przedmiot: Technologia naprawy elementów maszyn narzędzi i urządzeń CELE PRZEDMIOTOWEGO
Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe. Platforma sprzętowa. Rajda & Kasperek 2014 Katedra Elektroniki AGH 1
 Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe Platforma sprzętowa Rajda & Kasperek 2014 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6
Kierunek Inżynieria Akustyczna, V rok Programowalne Układy Cyfrowe Platforma sprzętowa Rajda & Kasperek 2014 Katedra Elektroniki AGH 1 Program wykładu Architektura układów FPGA Rodzina Xilinx Spartan-6
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Podstawy technik wytwarzania PTWII - projektowanie. Ćwiczenie 3. Instrukcja laboratoryjna
 PTWII - projektowanie Ćwiczenie 3 Programowanie frezarki sterowanej numerycznie (CNC) Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
PTWII - projektowanie Ćwiczenie 3 Programowanie frezarki sterowanej numerycznie (CNC) Instrukcja laboratoryjna Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Laboratorium Maszyny CNC. Nr 4
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
Plan studiów kierunku MECHANIKA I BUDOWA MASZYN
 bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Przygotowanie do pracy frezarki CNC
 Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Przygotowanie do pracy frezarki CNC Cykl I Ćwiczenie 2 Opracował: dr inż. Krzysztof
Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Przygotowanie do pracy frezarki CNC Cykl I Ćwiczenie 2 Opracował: dr inż. Krzysztof
Nazwa przedmiotu Wymiar ECTS blok I II III
 ólne dla wszyst. Zjawiska fizyczne w procesach wytwarzania W:30 L:15 3 fizyka 45 C:30 2 nietechniczne 30 W:15 P:15 2 HES 30 Podstawy matematyczne MES W:15 L:15 2 matematyka 30 Planowanie eksperymentu W:15
ólne dla wszyst. Zjawiska fizyczne w procesach wytwarzania W:30 L:15 3 fizyka 45 C:30 2 nietechniczne 30 W:15 P:15 2 HES 30 Podstawy matematyczne MES W:15 L:15 2 matematyka 30 Planowanie eksperymentu W:15
Centra. tokarskie DUGARD 100. ze skośnym łożem. www.jafo.com.pl DUGARD
 Centra tokarskie DUGARD 100 ze skośnym łożem DUGARD www.jafo.com.pl DUGARD 100 Tokarki CNC Szybkie posuwy 30m/min, prowadnice liniowe w osiach X i Z Prowadnice liniowe zapewniają duże prędkości przesuwów
Centra tokarskie DUGARD 100 ze skośnym łożem DUGARD www.jafo.com.pl DUGARD 100 Tokarki CNC Szybkie posuwy 30m/min, prowadnice liniowe w osiach X i Z Prowadnice liniowe zapewniają duże prędkości przesuwów
Politechnika Poznańska Instytut Technologii Mechanicznej. Programowanie obrabiarek CNC. Nr 2. Obróbka z wykorzystaniem kompensacji promienia narzędzia
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Programowanie obrabiarek CNC Nr 2 Obróbka z wykorzystaniem kompensacji promienia narzędzia Opracował: Dr inż. Wojciech Ptaszyński Poznań, 2015-03-05
1 Politechnika Poznańska Instytut Technologii Mechanicznej Programowanie obrabiarek CNC Nr 2 Obróbka z wykorzystaniem kompensacji promienia narzędzia Opracował: Dr inż. Wojciech Ptaszyński Poznań, 2015-03-05
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Szkolenia z zakresu obsługi i programowania obrabiarek sterowanych numerycznie CNC
 Kompleksowa obsługa CNC www.mar-tools.com.pl Szkolenia z zakresu obsługi i programowania obrabiarek sterowanych numerycznie CNC Firma MAR-TOOLS prowadzi szkolenia z obsługi i programowania tokarek i frezarek
Kompleksowa obsługa CNC www.mar-tools.com.pl Szkolenia z zakresu obsługi i programowania obrabiarek sterowanych numerycznie CNC Firma MAR-TOOLS prowadzi szkolenia z obsługi i programowania tokarek i frezarek
Karta katalogowa DS /5. dotykowy panel operatorski z kolorowym wyświetlaczem 3,5"
 1/5 dotykowy panel operatorski z kolorowym wyświetlaczem 3,5" 2/5 WŁAŚCIWOŚCI PANEL OPERATORSKI: EXACTO-GRAPH OGÓLNA CHARAKTERYSTYKA SmartTOUCH jest swobodnie programowalnym, dotykowym panelem operatorskim,
1/5 dotykowy panel operatorski z kolorowym wyświetlaczem 3,5" 2/5 WŁAŚCIWOŚCI PANEL OPERATORSKI: EXACTO-GRAPH OGÓLNA CHARAKTERYSTYKA SmartTOUCH jest swobodnie programowalnym, dotykowym panelem operatorskim,
Propozycja modernizacji napędu maszyny do obróbki zębów.
 Propozycja modernizacji napędu maszyny do obróbki zębów. Opracował: Artur Kozubski Proponuję przebudowanie napędu osi X (wzdłużnej), aby przyspieszyć przemieszczanie uchwytu z próbką między tarczą szlifierki
Propozycja modernizacji napędu maszyny do obróbki zębów. Opracował: Artur Kozubski Proponuję przebudowanie napędu osi X (wzdłużnej), aby przyspieszyć przemieszczanie uchwytu z próbką między tarczą szlifierki
SYNCHRONIZACJA PRACY SERWONAPĘDÓW AC W REALIZACJI ZŁOŻONYCH RUCHÓW ELEMENTÓW WYKONAWCZYCH ROBOTÓW I MASZYN
 SYNCHRONIZACJA PRACY SERWONAPĘDÓW AC W REALIZACJI ZŁOŻONYCH RUCHÓW ELEMENTÓW WYKONAWCZYCH ROBOTÓW I MASZYN Mateusz MUSIAŁ, Krzysztof CHRAPEK, Mateusz GŁÓWKA Streszczenie: W artykule opisano przeprowadzone
SYNCHRONIZACJA PRACY SERWONAPĘDÓW AC W REALIZACJI ZŁOŻONYCH RUCHÓW ELEMENTÓW WYKONAWCZYCH ROBOTÓW I MASZYN Mateusz MUSIAŁ, Krzysztof CHRAPEK, Mateusz GŁÓWKA Streszczenie: W artykule opisano przeprowadzone
Politechnika Częstochowska, Katedra Inżynierii Komputerowej (1,2) KIMLA, Producent Obrabiarek Numerycznych (3)
 KIMLA, Producent Obrabiarek Numerycznych (3)") Rozproszony system sterowania obrabiarką numeryczną bazujący na sieci Ethernet Czasu Rzeczywistego realizowany w ramach grantu badawczego rozwojowego Metody inteligentnego przetwarzania danych oraz obliczenia
Rozproszony system sterowania obrabiarką numeryczną bazujący na sieci Ethernet Czasu Rzeczywistego realizowany w ramach grantu badawczego rozwojowego Metody inteligentnego przetwarzania danych oraz obliczenia
Tadeusz KOWALSKI 1 Robert JASTRZĘBSKI 2 METODY OCENY DOKŁADNOŚCI TECHNOLOGICZNEJ PRECYZYJNYCH TOKAREK CNC 1. WSTĘP
 InŜynieria Maszyn, R. 17, z. 2, 2012 tokarka NC, obróbka, dokładność, koncentracja, pomiary Tadeusz KOWALSKI 1 Robert JASTRZĘBSKI 2 METODY OCENY DOKŁADNOŚCI TECHNOLOGICZNEJ PRECYZYJNYCH TOKAREK CNC Wybrano
InŜynieria Maszyn, R. 17, z. 2, 2012 tokarka NC, obróbka, dokładność, koncentracja, pomiary Tadeusz KOWALSKI 1 Robert JASTRZĘBSKI 2 METODY OCENY DOKŁADNOŚCI TECHNOLOGICZNEJ PRECYZYJNYCH TOKAREK CNC Wybrano
Moxa Solution Day 2010. Cezary Ziółkowski 08.06.2010
 Moxa Solution Day 2010 Komputery wbudowane Cezary Ziółkowski 08.06.2010 Agenda Komputery wbudwane MOXA Platforma RCore oraz oprogramowanie Moxa Device Manager Podsumowanie Komputery wbudowane MOXA Komputery
Moxa Solution Day 2010 Komputery wbudowane Cezary Ziółkowski 08.06.2010 Agenda Komputery wbudwane MOXA Platforma RCore oraz oprogramowanie Moxa Device Manager Podsumowanie Komputery wbudowane MOXA Komputery
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Forma studiów: stacjonarne Kierunek studiów: ZiIP Katedra: Technologii Maszyn i Automatyzacji Produkcji Projekt systemu modułowych separatorów przedmiotów dla docierarek jednotarczowych 1. Studia literatury
Forma studiów: stacjonarne Kierunek studiów: ZiIP Katedra: Technologii Maszyn i Automatyzacji Produkcji Projekt systemu modułowych separatorów przedmiotów dla docierarek jednotarczowych 1. Studia literatury
FUNKCJE INTERPOLACJI W PROGRAMOWANIU OBRABIAREK CNC
 Politechnika Białostocka Wydział Mechaniczny Zakład Inżynierii Produkcji Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: FUNKCJE INTERPOLACJI W PROGRAMOWANIU OBRABIAREK CNC Laboratorium z przedmiotu:
Politechnika Białostocka Wydział Mechaniczny Zakład Inżynierii Produkcji Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: FUNKCJE INTERPOLACJI W PROGRAMOWANIU OBRABIAREK CNC Laboratorium z przedmiotu:
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Mechanika i budowa maszyn Studia niestacjonarne I-go stopnia RW. Rzeszów r.
 Rzeszów, 19.12.2012 r. Mechanika i budowa maszyn Studia niestacjonarne I-go stopnia RW. Rzeszów 11.04.2012 r. MC Przedmiot humanistyczny historia techniki Wprowadzenie do procesów produkcyjnych Semestr
Rzeszów, 19.12.2012 r. Mechanika i budowa maszyn Studia niestacjonarne I-go stopnia RW. Rzeszów 11.04.2012 r. MC Przedmiot humanistyczny historia techniki Wprowadzenie do procesów produkcyjnych Semestr
Sterowanie obrabiarką numeryczną
 Sterowanie obrabiarką numeryczną Instrukcja do ćwiczenia laboratoryjnego Arkadiusz Lewicki, Jarosław Guziński 1. Wstęp Obrabiarki sterowane numerycznie (ang. computer numerical control CNC) wykorzystywane
Sterowanie obrabiarką numeryczną Instrukcja do ćwiczenia laboratoryjnego Arkadiusz Lewicki, Jarosław Guziński 1. Wstęp Obrabiarki sterowane numerycznie (ang. computer numerical control CNC) wykorzystywane
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Stosowanie tego urządzenia zwiększa możliwości stosowanego sprzętu jak i sofware.
 There are no translations available. DEVKIT8500A/D DevKit8500D DM3730 Evaluation Kit DevKit8500A AM3715 Evaluation Kit Jest to kontynuakcja świetnego DevKit8000. Stosowanie tego urządzenia zwiększa możliwości
There are no translations available. DEVKIT8500A/D DevKit8500D DM3730 Evaluation Kit DevKit8500A AM3715 Evaluation Kit Jest to kontynuakcja świetnego DevKit8000. Stosowanie tego urządzenia zwiększa możliwości
Rys.1. Zasada eliminacji drgań. Odpowiedź impulsowa obiektu na obiektu impuls A1 (niebieska), A2 (czerwona) i ich sumę (czarna ze znacznikiem).
, A2 (czerwona) i ich sumę (czarna ze znacznikiem).") Eliminacja drgań w układach o słabym tłumieniu przy zastosowaniu filtru wejściowego (Input Shaping Filter). WSTĘP W wielu złożonych układach mechanicznych elementy nie są połączone z sobą sztywno a występują
Eliminacja drgań w układach o słabym tłumieniu przy zastosowaniu filtru wejściowego (Input Shaping Filter). WSTĘP W wielu złożonych układach mechanicznych elementy nie są połączone z sobą sztywno a występują
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III
 oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
oznaczenie sprawy: CRZP/231/009/D/17, ZP/66/WETI/17 Załącznik nr 6 I-III do SIWZ Szczegółowy opis przedmiotu zamówienia dla części I-III Część I zamówienia Dostawa urządzeń na potrzeby modernizacji stolika
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego inżynierskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Sprzętowe i programowe składniki sieci komputerowych. 2. Routing w sieciach komputerowych. 3. Siedmiowarstwowy model
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Sprzętowe i programowe składniki sieci komputerowych. 2. Routing w sieciach komputerowych. 3. Siedmiowarstwowy model
e Newsletter CoM s & EMS
 e Newsletter CoM s & EMS Firma Ka-Ro electronics, położona w sercu Europy, w Niemieckim Akwizgranie, specjalizuje się w projektowaniu i produkcji elektroniki i jest pionierem produkcji miniaturowych komputerów
e Newsletter CoM s & EMS Firma Ka-Ro electronics, położona w sercu Europy, w Niemieckim Akwizgranie, specjalizuje się w projektowaniu i produkcji elektroniki i jest pionierem produkcji miniaturowych komputerów
Sterowanie napędów maszyn i robotów
 Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Wykład 7b - Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Instytut Automatyki i Robotyki Warszawa, 2014 Układy wieloobwodowe ze sprzężeniem od zmiennych stanu Zadanie przestawiania Postać modalna
Tematy prac dyplomowych magisterskich kierunek MiBM
 Tematy prac dyplomowych magisterskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Mgr/2013 Badanie sił skrawania i chropowatości powierzchni podczas obróbki stopów niklu 002/I8/ Mgr /2013
Tematy prac dyplomowych magisterskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Mgr/2013 Badanie sił skrawania i chropowatości powierzchni podczas obróbki stopów niklu 002/I8/ Mgr /2013
Automatyzacja wytwarzania
 Automatyzacja wytwarzania ESP, CAD, CAM, CIM,... 1/1 Plan wykładu Automatyzacja wytwarzania: NC/CNC Automatyzacja procesów pomocniczych: FMS Automatyzacja technicznego przygotowania produkcji: CAD/CAP
Automatyzacja wytwarzania ESP, CAD, CAM, CIM,... 1/1 Plan wykładu Automatyzacja wytwarzania: NC/CNC Automatyzacja procesów pomocniczych: FMS Automatyzacja technicznego przygotowania produkcji: CAD/CAP
Spis treści. Dzień 1. I Elementy układu automatycznej regulacji (wersja 1109) II Rodzaje regulatorów i struktur regulacji (wersja 1109)
 II Rodzaje regulatorów i struktur regulacji (wersja 1109)") Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Spis treści Dzień 1 I Elementy układu automatycznej regulacji (wersja 1109) I-3 Podstawowy problem sterowania I-4 Przykładowy obiekt regulacji I-5 Schemat blokowy układu automatycznej regulacji I-6 Klasyfikacja
Od prostego pozycjonowania po synchronizację. Rozwiązania Sterowania Ruchem. Napędy Elektryczne i Sterowania
 Od prostego pozycjonowania po synchronizację Rozwiązania Sterowania Ruchem 1 Podstawy Silniki Sterowniki Serwo Sterowniki Motion Zajęcia praktyczne Przykłady parametryzacji serwonapędu Kreator parametryzacji
Od prostego pozycjonowania po synchronizację Rozwiązania Sterowania Ruchem 1 Podstawy Silniki Sterowniki Serwo Sterowniki Motion Zajęcia praktyczne Przykłady parametryzacji serwonapędu Kreator parametryzacji
Specyfikacja techniczna obrabiarki. wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40
 Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Transceiver do szybkiej komunikacji szeregowej i pętla fazowa do ogólnych zastosowań
 Transceiver do szybkiej komunikacji szeregowej i pętla fazowa do ogólnych zastosowań Mirosław Firlej Opiekun: dr hab. inż. Marek Idzik Faculty of Physics and Applied Computer Science AGH University of
Transceiver do szybkiej komunikacji szeregowej i pętla fazowa do ogólnych zastosowań Mirosław Firlej Opiekun: dr hab. inż. Marek Idzik Faculty of Physics and Applied Computer Science AGH University of
Plan zjazdów KKZ M.19 rok szkolny 2018/2019
 Plan zjazdów KKZ M.19 rok szkolny 2018/2019 Zjazd 2 01-02 grudnia 2018 Lp. Godz. SOBOTA 01 grudnie I Programowanie i obsługa obrabiarek sterowanych numerycznie - 101 2. Programowanie i obsługa obrabiarek
Plan zjazdów KKZ M.19 rok szkolny 2018/2019 Zjazd 2 01-02 grudnia 2018 Lp. Godz. SOBOTA 01 grudnie I Programowanie i obsługa obrabiarek sterowanych numerycznie - 101 2. Programowanie i obsługa obrabiarek
dr inŝ. Adam Zalewski ITW
 Optymalizacja sposobu i parametrów obróbki na obrabiarkach sterowanych numerycznie dr inŝ. Adam Zalewski ITW 22.01.2009 Plan wystąpienia Przegląd problematyki Istniejący stan wiedzy Integrator CNC/CAM
Optymalizacja sposobu i parametrów obróbki na obrabiarkach sterowanych numerycznie dr inŝ. Adam Zalewski ITW 22.01.2009 Plan wystąpienia Przegląd problematyki Istniejący stan wiedzy Integrator CNC/CAM
Wykorzystanie układów FPGA w implementacji systemów bezpieczeństwa sieciowego typu Firewall
 Grzegorz Sułkowski, Maciej Twardy, Kazimierz Wiatr Wykorzystanie układów FPGA w implementacji systemów bezpieczeństwa sieciowego typu Firewall Plan prezentacji 1. Architektura Firewall a załoŝenia 2. Punktu
Grzegorz Sułkowski, Maciej Twardy, Kazimierz Wiatr Wykorzystanie układów FPGA w implementacji systemów bezpieczeństwa sieciowego typu Firewall Plan prezentacji 1. Architektura Firewall a załoŝenia 2. Punktu
2014-05-05. Automatyka i Regulacja Automatyczna PRz 2013. Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński
 Automatyka i Regulacja Automatyczna PRz 2013 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek
Automatyka i Regulacja Automatyczna PRz 2013 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek
ANALIZA DYNAMIKI NAPĘDU POSUWU TOKARKI PRZY TOCZENIU GWINTÓW FALISTYCH
 MODELOWANIE INŻYNIERSKIE nr 55, ISSN 1896-771X ANALIZA DYNAMIKI NAPĘDU POSUWU TOKARKI PRZY TOCZENIU GWINTÓW FALISTYCH Piotr Sitarz 1a, Bartosz Powałka 1b, Arkadiusz Parus 1c 1 Instytut Technologii Maszyn,
MODELOWANIE INŻYNIERSKIE nr 55, ISSN 1896-771X ANALIZA DYNAMIKI NAPĘDU POSUWU TOKARKI PRZY TOCZENIU GWINTÓW FALISTYCH Piotr Sitarz 1a, Bartosz Powałka 1b, Arkadiusz Parus 1c 1 Instytut Technologii Maszyn,
Centra. tokarskie DUGARD 200HT / 200MC. ze skośnym łożem DUGARD. www.jafo.com.pl
 Centra tokarskie DUGARD H / MC ze skośnym łożem DUGARD www.jafo.com.pl DUGARD H/MC okarki CNC Konik Hydrauliczny Wysuw tuleii konika można sterować programem lub pedałem nożnym. Automatyczny czujnik kontroli
Centra tokarskie DUGARD H / MC ze skośnym łożem DUGARD www.jafo.com.pl DUGARD H/MC okarki CNC Konik Hydrauliczny Wysuw tuleii konika można sterować programem lub pedałem nożnym. Automatyczny czujnik kontroli
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
Technik Mechanik. Użytkowanie Obrabiarek Skrawających (CNC)
") Technik Mechanik Użytkowanie Obrabiarek Skrawających (CNC) Technik Mechanik Programuje i obsługuje obrabiarki CNC, Projektuje i wytwarza części i zespoły maszyn i urządzeń mechanicznych z wykorzystaniem
Technik Mechanik Użytkowanie Obrabiarek Skrawających (CNC) Technik Mechanik Programuje i obsługuje obrabiarki CNC, Projektuje i wytwarza części i zespoły maszyn i urządzeń mechanicznych z wykorzystaniem
Tok Specjalność Semestr Z / L Blok Przedmiot
 ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
ENERGETYKA S1 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 11 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 12 ENE_1A_S_2015_2016_21564_1 semestr 5 Zimowy Blok 13 ENE_1A_S_2015_2016_21564_1 semestr
Prototyp przestrzennego, przesuwnego manipulatora równoległego, ze zintegrowanymi osiami elektrohydraulicznymi
 386 MECHANIK NR 5 6/2016 Prototyp przestrzennego, przesuwnego manipulatora równoległego ze zintegrowanymi osiami elektrohydraulicznymi Prototype of the spatial translational parallel manipulator with integrated
386 MECHANIK NR 5 6/2016 Prototyp przestrzennego, przesuwnego manipulatora równoległego ze zintegrowanymi osiami elektrohydraulicznymi Prototype of the spatial translational parallel manipulator with integrated
WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA
 WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA Ryszard WOJCIK 1, Norbert KEPCZAK 1 1. WPROWADZENIE Procesy symulacyjne pozwalają prześledzić zachowanie
WPŁYW USTALENIA I MOCOWANIA KORPUSÓW PRZEKŁADNI TECHNOLOGICZNIE PODOBNYCH NA KSZTAŁT OTWORÓW POD ŁOŻYSKA Ryszard WOJCIK 1, Norbert KEPCZAK 1 1. WPROWADZENIE Procesy symulacyjne pozwalają prześledzić zachowanie
Seria Jubileuszowa. Rozwiązania informatyczne. Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości. oszczędność energii. ochrona środowiska
 Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Sieci miejscowe stosowane w układach serwonapędowych. Zagadnienia komunikacji w nowoczesnych układach serwonapędowych R Θ. R ω R M
 Zagadnienia komunikacji w nowoczesnych układach serwonapędowych dr inŝ Stefan Brock Sieci miejscowe stosowane w układach serwonapędowych Serwonapędy układy regulacji połoŝenia, wyposaŝone w silniki wysokomomentowe
Zagadnienia komunikacji w nowoczesnych układach serwonapędowych dr inŝ Stefan Brock Sieci miejscowe stosowane w układach serwonapędowych Serwonapędy układy regulacji połoŝenia, wyposaŝone w silniki wysokomomentowe
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Mechatroniczne głowice wytaczarskie firmy D Andrea
 Mechatroniczne głowice wytaczarskie firmy D Andrea Rafał Wujczak Historia firmy D ANDREA zaczyna się w 1951 roku, wraz z powstaniem pierwszej specjalizowanej głowicy SENSITIV T-TA, przeznaczonej do planowania
Mechatroniczne głowice wytaczarskie firmy D Andrea Rafał Wujczak Historia firmy D ANDREA zaczyna się w 1951 roku, wraz z powstaniem pierwszej specjalizowanej głowicy SENSITIV T-TA, przeznaczonej do planowania
DOTACJE NA INNOWACJE. ZAPROSZENIE DO SKŁADANIA OFERT nr 01/2013 NA 5-CIO OSIOWE PIONOWE CENTRUM FREZARSKIE. Wanaty, 25.04.2013r.
 DOTACJE NA INNOWACJE RĘCZNY MANIPULATOR DO OBRABIAREK Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka. ZAPROSZENIE
DOTACJE NA INNOWACJE RĘCZNY MANIPULATOR DO OBRABIAREK Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka. ZAPROSZENIE
45-75 - 90 cm V-TABLE 55
 45-75 - 90 cm V-TABLE 55 V-TABLE to multimedialny stół dotykowy. O jego kształcie, rozmiarze czy kolorze decydujesz sam adekwatnie do miejsca, w którym chcesz go postawić i funkcji, jakie ma spełniać.
45-75 - 90 cm V-TABLE 55 V-TABLE to multimedialny stół dotykowy. O jego kształcie, rozmiarze czy kolorze decydujesz sam adekwatnie do miejsca, w którym chcesz go postawić i funkcji, jakie ma spełniać.
OPIS PRZEDMIOTU ZAMÓWIENIA/FORMULARZ OFERTOWO-ASORTYMENTOWY
 .. Wykonawca OPIS PRZEDMIOTU ZAMÓWIENIA/FORMULARZ OFERTOWO-ASORTYMENTOWY 1. Dostawa 15 szt. Komputerów o następujących parametrach: Dostawa 15 szt. Komputerów Oferuję 15 szt. komputerów (podać np. markę
.. Wykonawca OPIS PRZEDMIOTU ZAMÓWIENIA/FORMULARZ OFERTOWO-ASORTYMENTOWY 1. Dostawa 15 szt. Komputerów o następujących parametrach: Dostawa 15 szt. Komputerów Oferuję 15 szt. komputerów (podać np. markę
Laboratorium Maszyny CNC. Nr 6
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 6 Regulatory położenia w układach sterujących obrabiarek CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 3 stycznia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 6 Regulatory położenia w układach sterujących obrabiarek CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 3 stycznia
Ćwiczenie OB-6 PROGRAMOWANIE OBRABIAREK
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-6 Temat: PROGRAMOWANIE OBRABIAREK Redakcja i opracowanie: dr inż. Paweł Kubik, mgr inż. Norbert Kępczak Łódź, 2013r. Stanowisko
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-6 Temat: PROGRAMOWANIE OBRABIAREK Redakcja i opracowanie: dr inż. Paweł Kubik, mgr inż. Norbert Kępczak Łódź, 2013r. Stanowisko
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Sterowanie napędów maszyn i robotów
 Wykład 8 - zaawansowane układy sterowania Instytut Automatyki i Robotyki Warszawa, 2014 adaptacyjne (ang. adaptive control) z dostosowaniem się do aktualnych warunków pracy napędu - koncepcje: ze wstępnie
Wykład 8 - zaawansowane układy sterowania Instytut Automatyki i Robotyki Warszawa, 2014 adaptacyjne (ang. adaptive control) z dostosowaniem się do aktualnych warunków pracy napędu - koncepcje: ze wstępnie
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Tematy prac dyplomowych inżynierskich kierunek MiBM
 Tematy prac dyplomowych inżynierskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Inż/2013 002/I8/Inż/2013 003/I8/ Inż /2013 Wykonywanie otworów gwintowanych na obrabiarkach CNC. Projekt
Tematy prac dyplomowych inżynierskich kierunek MiBM Nr pracy Temat Cel Zakres Prowadzący 001/I8/Inż/2013 002/I8/Inż/2013 003/I8/ Inż /2013 Wykonywanie otworów gwintowanych na obrabiarkach CNC. Projekt
Use of the ball-bar measuring system to investigate the properties of parallel kinematics mechanism
 Artykuł Autorski z VIII Forum Inżynierskiego ProCAx, Siewierz, 19-22 XI 2009 (MECHANIK nr 2/2010) Dr inż. Krzysztof Chrapek, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, mgr inż. Paweł Maślak Politechnika
Artykuł Autorski z VIII Forum Inżynierskiego ProCAx, Siewierz, 19-22 XI 2009 (MECHANIK nr 2/2010) Dr inż. Krzysztof Chrapek, dr inż. Piotr Górski, dr inż. Stanisław Iżykowski, mgr inż. Paweł Maślak Politechnika
w w w. r a n d d t e c h. p l
 PL www.randdtech.pl EASY WAY Maksimum ochrony, tylko tam, gdzie wymagane. Do aluminium lub PVC. Linia pił Precision zapewnia najwyższą swobodę pod względem konfiguracji. Wyposażona w integralne zabezpieczenie,
PL www.randdtech.pl EASY WAY Maksimum ochrony, tylko tam, gdzie wymagane. Do aluminium lub PVC. Linia pił Precision zapewnia najwyższą swobodę pod względem konfiguracji. Wyposażona w integralne zabezpieczenie,
PLAN STUDIÓW NIESTACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy
 ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
Szczegółowy opis przedmiotu zamówienia. Część 1 - Laboratoryjny zestaw prototypowy
 Załącznik nr 6 do SIWZ Szczegółowy opis przedmiotu zamówienia Ilość: 3 sztuki (kpl.) CPV 38434000-6 analizatory Część 1 - Laboratoryjny zestaw prototypowy Parametry urządzenia: Zintegrowany oscyloskop:
Załącznik nr 6 do SIWZ Szczegółowy opis przedmiotu zamówienia Ilość: 3 sztuki (kpl.) CPV 38434000-6 analizatory Część 1 - Laboratoryjny zestaw prototypowy Parametry urządzenia: Zintegrowany oscyloskop: