WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Sensoryka robotów. Dr inż. Mariusz Dąbkowski
|
|
|
- Sebastian Stefaniak
- 8 lat temu
- Przeglądów:
Transkrypt
1 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Sensoryka robotów Dr inż. Mariusz Dąbkowski

2 Podział układów sensorycznych używanych w robotyce Obecności i zbliżenia Sonar Radar Czujnik laserowy Sensor podczerwieni Czujnik podczerwieni Prędkości Prądnica tachometryczna Układ obrotowo-impulsowy Zmysłów Dotyku Czujniki stykowe Czujniki siły Sztuczna skóra

3 Podział układów sensorycznych używanych w robotyce Wzroku Optyczne Systemy rozpoznawania obrazów Położenia i przemieszczenia Potencjometr Selsyn przelicznikowy (rezolwer) Induktosyn Przetwornik obrotowo-impulsowy (enkoder) Liniał kreskowy Tarcza kodowa Liniał kodowy
 Liniał kreskowy Tarcza")
4 Zależność prędkości fali akustycznej od temperatury ( T ) c = 13, T 273

5 Zależność długości fali akustycznej od jej częstotliwości λ = c f

6 α α Tłumienie fali akustycznej w zależności od częstotliwości i wilgotności ( f ) = 0,01 f dla f < 50kHz ( f ) = 0,022 f 0,6 dla f 50, 300 khz
 = 0,022 f 0,6 dla f 50,")
7 Tłumienie fali akustycznej w zależności od częstotliwości i wilgotności

8 Trójwymiarowa powierzchnia wiązki ultradźwięków D λ K. W.

9 Dwuwymiarowy przekrój przez wiązkę ultradźwięków D λ K. W.

10 Pomiar odległości od ściany EL f (R) = SPL(R 0 ) 20log(R/R 0 ) α f R [db/1μp] gdzie: EL f (R) poziom echa dla częstotliwości f R odległość od przeszkody SPL(R 0 ) (Sound Pressure Level) poziom ciśnienia dźwięku czujnika dla odległości referencyjnej R 0 SPL(R 0 ) = 20log(p) p [μp] α f współczynnik tłumienia dźwięku w ośrodku dla częstotliwości f
 = 20log(p) p [μp] α f współczynnik tłumienia dźwięku w ośrodku dla")
11 Pomiar odległości od przedmiotów okrągłych EL f (R) = SPL(R 0 ) 40log(R/R 0 ) 2α f R + TS gdzie: TS (Target Strength) poziom odbicia od celu
 poziom")
12 Błąd pomiaru wprowadzany przez zmiany temperatury Błąd bezwzględny err Rin (R) = R [1/ 0 C] err Rft (R) = R [1/ 0 C] Błąd względny err Rin (ΔR) = ΔR [1/ 0 C] err Rft (Δ R) = ΔR [1/ 0 C]
![0017R [1/ 0 C] err Rft (R) = 0.](/docs-images/42/15241924/images/page_12.jpg "0204R [1/ 0 C] Błąd względny err Rin (ΔR) = 0.")
13 Zasięg sensorów w zależności od obiektu i częstotliwości fali

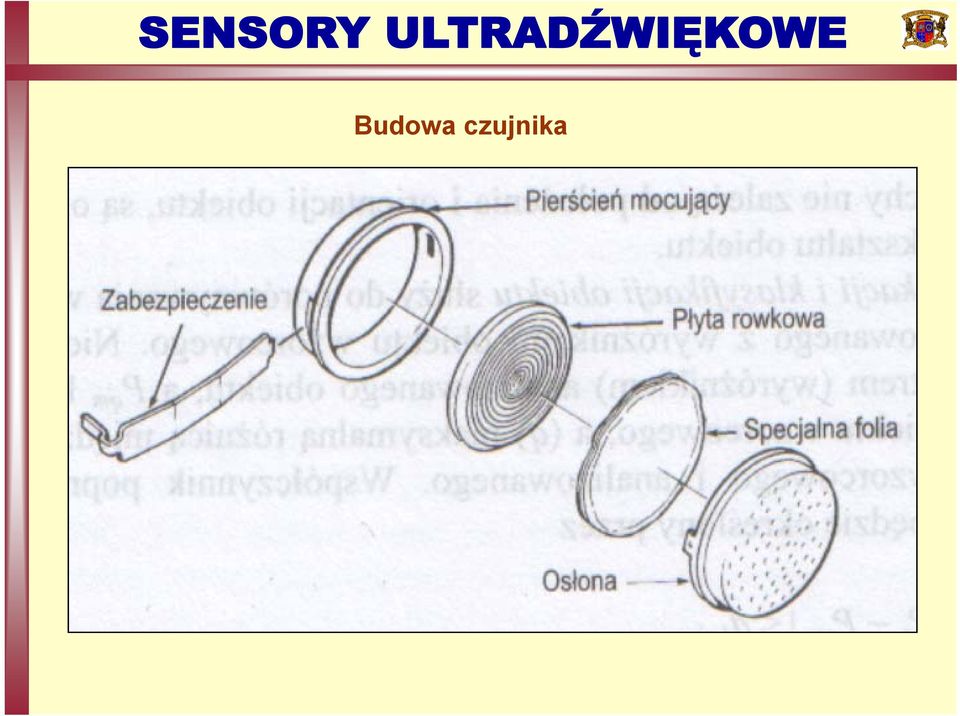
14 Budowa czujnika
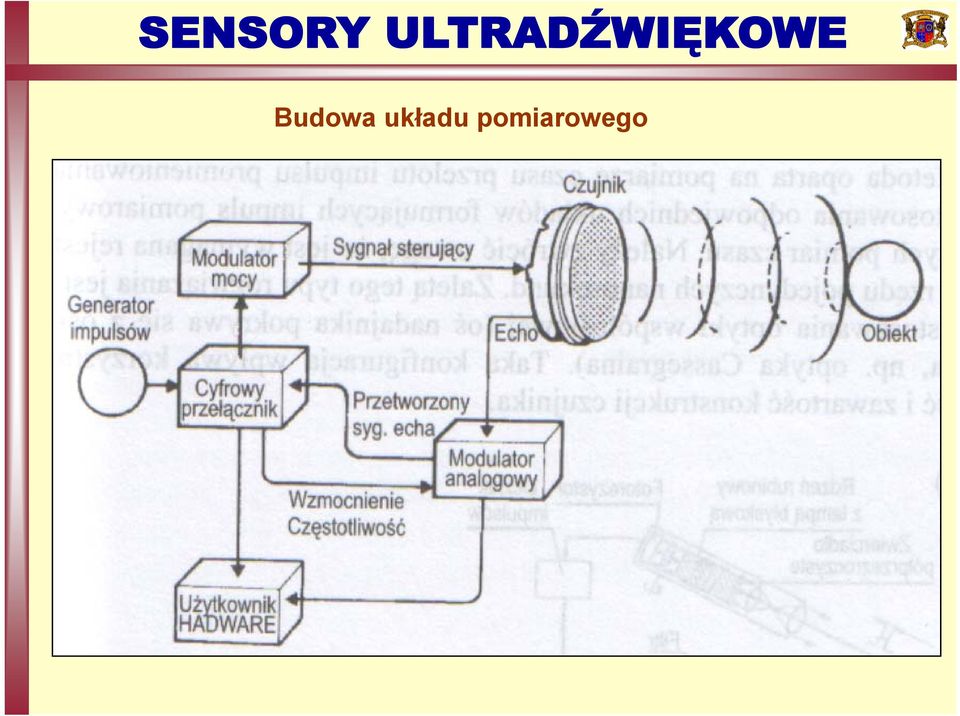
15 Budowa układu pomiarowego
16 Przykład czujnika przemysłowego UM A-HP firmy SELS Strefa działania Strefa martwa Częstotliwość fali ultradźwiękowej Rozdzielczość Powtarzalność Wpływ temperatury Czas opóźnienia sygnału analogowego mm mm ok. 120 khz 1 mm ±3 mm 0,17 %/K 130 ms

17 Radio Detection And Ranging Wykorzystuje fale radiowe λ [mm], f [GHz] Równanie zasięgu radaru (źródło fal w tym samym miejscu co odbiornik) P 0 = P G n n A σ ( 4π ) R L gdzie: P n moc nadajnika G n zysk anteny nadawczej A o skuteczna apertura (powierzchnia) anteny odbiorczej σ skuteczna powierzchnia odbicia R odległość pomiędzy radarem a celem L współczynnik tłumienia na trasie sygnału radar-cel

18 Wykorzystują fale odługości λ [nm] Czujnik impulsowy W dalmierzach impulsowych mierzony jest czas od momentu wyjścia konkretnego impulsu do jego powrotu. 1 D = v τ 2 Dokładność: τ = 2D = = 0, v () 6 [] s

19 Czujnik fazowy W dalmierzach fazowych mierzone jest przesunięcie fazowe pomiędzy falami: wyjściową i odbitą D = λ Δϕ w 2 2π y gdzie: 2D Δϕ w y = ω v

20 Wykorzystują fale o długości λ 780 [nm] 3 [mm] Czujniki aktywne Prąd zasilania Sensor zbliżenia i Ścieżka światła Przedmiot Napięcie wyczuwalne 1 [m] Czujniki pasywne Wielopolowy element fotooptyczny reagujący na promieniowanie podczerwone Wykrywanie ludzi systemy alarmowe
![wyczuwalne 1 [m] Czujniki pasywne Wielopolowy element fotooptyczny](/docs-images/42/15241924/images/page_20.jpg "reagujący na promieniowanie podczerwone Wykrywanie ludzi systemy")
21 1 źródło światła 2 układ optyczny 3 fotodioda 4 układ optyczny odbiorczy 5 strefa rozpoznawania obiektów
22 Prądnica tachometryczna Najbardziej rozpowszechnione prądnice prądu stałego m V U = K Zalety Brak błędów fazowych PT n Wysoka liniowość i stromość charakterystyk wyjściowych Brak napięcia wzbudzenia w prądnicach z magnesami trwałymi Niewystępowanie SEM przy nieruchomym tworniku Wady Obecność styków ślizgowych Zmniejszenie niezawodności Pulsacje napięcia wyjściowego (szczególnie przy małych prędkościach) Iskrzenie, zakłócenia radioelektryczne Błąd do kilku procent, K PT = obr min
23 Przetwornik obrotowo-impulsowy = s rad t C N POM e 1 2π ω + = + = s m t e t t D e t t t v e D v e Di i Di i Di i i Vi Δ Δ Δ Δ Δ Δ Δ Δ Δ Δ 2 1 Błąd metody + = + = s rad t e t t e t t t e e i i i i i i i i α α α ω Δ Δ Δα Δ Δ Δω Δ Δα Δω Δ 2 1 [ ] [ ] s t rad e dla s rad e i i 05 0,, 180, = = = π Δ Δ α ω [ ] [ ] s t m e dla s m e Di Vi 05 0,, 0,00144, = = = Δ Δ np.: np.:
24 Czujniki stykowe Łączniki stykowe (drogowe) element generujący sygnał elektryczny (hydrauliczny, mechaniczny) w wyniku przesunięcia względem niego kołka, zderzaka lub magnesu trwałego Czujniki sił i naprężeń Tensometry rezystancyjne zmiana rezystancji przetwornika metalowego pod wpływem sił naprężeń Przetworniki zmieniające siłę na przesunięcie mechaniczne mieszki sprężyste
25 Przetworniki magnetoelektryczne zmiana kierunku wektorów magnetyzacji pod wpływem naprężeń oddziałujących na ferromagnetyk w formie walca zmiana sprzężenia magnetycznego między uzwojeniami wtórnym a pierwotnym
26 Sztuczna skóra
27 Sztuczna skóra
28 Sztuczna skóra
29 Optyczne Wykorzystuje się układ soczewek skupiających do dokonywania przy jego użyciu transformaty Fouriera Cyfrowe Komputerowe przetwarzanie obrazu przy użyciu metod matematycznych: statystyki, teorii podejmowania decyzji, teorii informacji Bioniczne Zastosowanie sztucznych sieci neuronowych
30 Schemat blokowy układu wizyjnego robotów Kamera A/C Lokalizacja obiektu Poszukiwanie gradient Blok wstępnego przetwarzania Aproksymacja konturu Blok wydzielania i analizy Obliczanie parametrów Transformacja linii Model obiektu Identyfikacja obiektu Blok identyfikacji obiektu Do układu sterowania robota
31 Blok wstępnego przetwarzania obrazu Przetworzenie analogowego zapisu obrazu na cyfrowy Lokalizacja obiektu w obrazie f(1,1) f(m,n) S 1 S 2 S 4 S 3 Wydzielenie zmian jaskrawości w obrazie oknie Aproksymacja konturów obiektu
32 Blok wydzielania i analizy cech obiektu Określenie wyróżników zapewniających jednoznaczne rozpoznanie obiektu spośród skończonego zbioru wzorców Pod uwagę bierze się: Powierzchnię rzutu obiektu S Obwód rzutu obiektu L Współczynniki kompaktowości wyrażone wzorami w 1 = L S 2, w 2 2 L = 4πS 2, w 3 4πS = 2 L Moment bezwładności powierzchni obrazu względem środka ciężkości tej powierzchni Odległości między charakterystycznymi punktami obrazu Występowanie lub brak odcinków prostych albo okręgów w obwiedniach obrazu 2
33 Blok identyfikacji i klasyfikacji Porównanie wyróżników obiektu badanego z wyróżnikami obiektu wzorcowego Współczynnik poprawnej identyfikacji M ( q) = 1 dla Pq Pqm < d 0 w przeciwnym ( q) przypadku gdzie: P q q ty parametr analizowanego obiektu P qm q ty parametr obiektu wzorcowego d (q) maksymalna różnica pomiędzy q tymi parametrami obiektów: badanego i wzorcowego
34 U = U 0 ϕ 360 O
35 1 stojan 2 wirnik U W = KU sin t 0 ( ω ϕ )
36 1 liniał z uzwojeniem wtórnym 2 suwak z uzwojeniami pierwotnymi 3 warstwa izolacyjna 4 folia miedziana 5 zespół przesuwny
37 a) uzwojenia stojana b) uzwojenia wirnika
38 1,2 pola widzenia fotoelementów 3,8 fotoelementy 4 przysłona z dwoma parami prążków 5 oświetlacz 6 obrotowa tarcza kreskowa 7 przebiegi wyjściowych sygnałów elektrycznych
39 Błąd metody Układ odometrii 2πN ΔD = r = cm N[ m] Ce gdzie: N liczba impulsów pochodzących z licznika, C e liczba impulsów licznika dla jednego pełnego obrotu koła (co odpowiada liczbie otworów na tarczy), r promień koła, c m współczynnik konwersji impulsów enkodera na liniowe przesunięcie. Δ e = π α i 180 Δ = Δβ [ rad] Δβ Δβ i i i 2i 1i Di O eβi ΔeD1i + ΔeD2i + Δel1 = ΔeD1i + ΔeD2i + Δel1 = 0,0088 rad = 0, ΔD1i ΔD2i Δl1 2l1 2l1 2l1 l1 2Πr ΔeD1 i, D2i = Δeαir = = 0, Δ ΔD Δe + ΔD Δe [ m] 1 = Δe i i edi = D1i D2i D1i D2i D1i D2i ΔD1 i ΔD2i Δe 1 = Δe = Δe ΔD ΔD Δe
40 Przetwornik z podwójną liczbą fotoelementów (Heidenhain) 1 żarówka 6 wałek napędowy 2 układ optyczny 7 fotoelement 3 przysłona 8 układ 4 prążki pojedynczych impulsów (1 na obrót) elektroniczny 5 tarcza kreskowa
41 1 żarówka 2 układ optyczny 3 przysłona 4 prążki pojedynczych impulsów (bazowych) 5 liniał kreskowy 6 fotoelement 7 układ elektroniczny
42 1 fotoelement 2 żarówka 3 kondensor
43
44
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Czujniki i urządzenia pomiarowe
 Czujniki i urządzenia pomiarowe Czujniki zbliŝeniowe (krańcowe), detekcja obecności Wyłączniki krańcowe mechaniczne Dane techniczne Napięcia znamionowe 8-250VAC/VDC Prądy ciągłe do 10A śywotność mechaniczna
Czujniki i urządzenia pomiarowe Czujniki zbliŝeniowe (krańcowe), detekcja obecności Wyłączniki krańcowe mechaniczne Dane techniczne Napięcia znamionowe 8-250VAC/VDC Prądy ciągłe do 10A śywotność mechaniczna
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO
 Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Temat ćwiczenia: BEZDOTYKOWY CZUJNIK ULTRADŹWIĘKOWY POŁOŻENIA LINIOWEGO 1. Wprowadzenie Ultradźwiękowy bezdotykowy czujnik położenia liniowego działa na zasadzie pomiaru czasu powrotu impulsu ultradźwiękowego,
Wykład 7. Selsyny - mikromaszyny indukcyjne, zastosowanie w automatyce (w układach pomiarowych i sterowania) do:
 do:") Serwonapędy w automatyce i robotyce Wykład 7 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Selsyny Selsyny - mikromaszyny indukcyjne, zastosowanie w automatyce (w układach pomiarowych i sterowania)
Serwonapędy w automatyce i robotyce Wykład 7 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Selsyny Selsyny - mikromaszyny indukcyjne, zastosowanie w automatyce (w układach pomiarowych i sterowania)
Pomiar prędkości obrotowej
 2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW.
 3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW. Przy rozchodzeniu się fal dźwiękowych może dochodzić do częściowego lub całkowitego odbicia oraz przenikania fali przez granice ośrodków. Przeszkody napotykane
3. WYNIKI POMIARÓW Z WYKORZYSTANIEM ULTRADŹWIĘKÓW. Przy rozchodzeniu się fal dźwiękowych może dochodzić do częściowego lub całkowitego odbicia oraz przenikania fali przez granice ośrodków. Przeszkody napotykane
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Robot do pokrycia powierzchni terenu
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
Metody Optyczne w Technice. Wykład 5 Interferometria laserowa
 Metody Optyczne w Technice Wykład 5 nterferometria laserowa Promieniowanie laserowe Wiązka monochromatyczna Duża koherencja przestrzenna i czasowa Niewielka rozbieżność wiązki Duża moc Największa możliwa
Metody Optyczne w Technice Wykład 5 nterferometria laserowa Promieniowanie laserowe Wiązka monochromatyczna Duża koherencja przestrzenna i czasowa Niewielka rozbieżność wiązki Duża moc Największa możliwa
Spis treści Wstęp Rozdział 1. Metrologia przedmiot i zadania
 Spis treści Wstęp Rozdział 1. Metrologia przedmiot i zadania 1.1. Przedmiot metrologii 1.2. Rola i zadania metrologii współczesnej w procesach produkcyjnych 1.3. Główny Urząd Miar i inne instytucje ważne
Spis treści Wstęp Rozdział 1. Metrologia przedmiot i zadania 1.1. Przedmiot metrologii 1.2. Rola i zadania metrologii współczesnej w procesach produkcyjnych 1.3. Główny Urząd Miar i inne instytucje ważne
Podstawy Automatyki. Wykład 12 - Układy przekaźnikowe. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Badanie czujników odległości Laboratorium Mechatroniki i Robotyki
 Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Badanie czujników odległości Laboratorium Mechatroniki i Robotyki Wrocław 2017 1. Cel ćwiczenia Celem ćwiczenia jest poznanie zasady działania
Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Badanie czujników odległości Laboratorium Mechatroniki i Robotyki Wrocław 2017 1. Cel ćwiczenia Celem ćwiczenia jest poznanie zasady działania
PRZYRZĄDY POMIAROWE. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRZYRZĄDY POMIAROWE Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Przyrządy pomiarowe Ogólny podział: mierniki, rejestratory, detektory, charakterografy.
PRZYRZĄDY POMIAROWE Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Przyrządy pomiarowe Ogólny podział: mierniki, rejestratory, detektory, charakterografy.
Czujniki i urządzenia pomiarowe. Czujniki zbliżeniowe (krańcowe), detekcja obecności. Czujniki zbliżeniowe, detekcja obecności
, detekcja obecności. Czujniki zbliżeniowe, detekcja obecności") Czujniki i urządzenia pomiarowe Czujniki zbliżeniowe (krańcowe), detekcja obecności Wyłączniki krańcowe mechaniczne Dane techniczne Napięcia znamionowe 8-250VAC/VDC Prądy ciągłe do 10A Żywotność mechaniczna
Czujniki i urządzenia pomiarowe Czujniki zbliżeniowe (krańcowe), detekcja obecności Wyłączniki krańcowe mechaniczne Dane techniczne Napięcia znamionowe 8-250VAC/VDC Prądy ciągłe do 10A Żywotność mechaniczna
Identyfikacja cieplnych modeli elektrycznych układów napędowych
 Jakub Wierciak Identyfikacja cieplnych modeli elektrycznych układów napędowych Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Identyfikacja cieplnych modeli elektrycznych układów napędowych Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
SILNIK KROKOWY. w ploterach i małych obrabiarkach CNC.
 SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
SILNIK KROKOWY Silniki krokowe umożliwiają łatwe sterowanie drogi i prędkości obrotowej w zakresie do kilkuset obrotów na minutę, zależnie od parametrów silnika i sterownika. Charakterystyczną cechą silnika
Czujniki. Czujniki służą do przetwarzania interesującej nas wielkości fizycznej na wielkość elektryczną łatwą do pomiaru. Najczęściej spotykane są
 Czujniki Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Czujniki Czujniki służą do przetwarzania interesującej
Czujniki Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Czujniki Czujniki służą do przetwarzania interesującej
Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy 1. Zapoznanie się z konstrukcją, zasadą działania i układami sterowania
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA5 Silnik 2-fazowy indukcyjny wykonawczy 1. Zapoznanie się z konstrukcją, zasadą działania i układami sterowania
Wydział Metrologii Elektrycznej, Fizykochemii, Akustyki, Drgań i Promieniowania Optycznego
 Wydział Metrologii Elektrycznej, Fizykochemii, Akustyki, Drgań i Promieniowania Optycznego ul. Polanki 124 c, 80-308 Gdańsk tel. 58 524 52 00, fax 58 524 52 29, e-mail: w2@oum.gda.pl 2 Akustyka i ultradźwięki
Wydział Metrologii Elektrycznej, Fizykochemii, Akustyki, Drgań i Promieniowania Optycznego ul. Polanki 124 c, 80-308 Gdańsk tel. 58 524 52 00, fax 58 524 52 29, e-mail: w2@oum.gda.pl 2 Akustyka i ultradźwięki
Indukcyjny czujnik przemieszczenia liniowego LI300P0-Q25LM0-LIU5X3-H1151
 prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
86403,86413,86423. Prędkość obrotowa do 3000 min -1 (chwilowa)
") Czujniki obrotowego obrotowe, przeniesienie sygnału ślizgowym pierścieniem Typ 86403 z czworokątem Typ 86413 z końcówkami w formie okrągłego wału Typ 86422 zakończone wałem sześciokątnym Nowość Zakres
Czujniki obrotowego obrotowe, przeniesienie sygnału ślizgowym pierścieniem Typ 86403 z czworokątem Typ 86413 z końcówkami w formie okrągłego wału Typ 86422 zakończone wałem sześciokątnym Nowość Zakres
Zakład Teorii Maszyn i Układów Mechatronicznych. LABORATORIUM Podstaw Mechatroniki. Sensory odległości
 Zakład Teorii Maszyn i Układów Mechatronicznych LABORATORIUM Podstaw Mechatroniki Sensory odległości Podstawy Mechatroniki Nazwa Stanowiska: Stanowisko do badania sensorów odległości Widok Stanowiska:
Zakład Teorii Maszyn i Układów Mechatronicznych LABORATORIUM Podstaw Mechatroniki Sensory odległości Podstawy Mechatroniki Nazwa Stanowiska: Stanowisko do badania sensorów odległości Widok Stanowiska:
Ćwiczenie 6 BADANIE PRĄDNIC TACHOMETRYCZNYCH
 Ćwiczenie 6 BADANIE PRĄDNIC TACHOMETRYCZNYCH Cel ćwiczenia: Poznanie budowy i zasady działania oraz podstawowych charakterystyk prądnic tachometrycznych. Zbadanie wpływu obciążenia na ich kształt charakterystyki
Ćwiczenie 6 BADANIE PRĄDNIC TACHOMETRYCZNYCH Cel ćwiczenia: Poznanie budowy i zasady działania oraz podstawowych charakterystyk prądnic tachometrycznych. Zbadanie wpływu obciążenia na ich kształt charakterystyki
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.
, bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.") Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Ćwiczenie: "Silnik prądu stałego"
 Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV
 Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
SENSORY. Aktywne np. rezystancyjne Pasywne np. elektromagnetyczne
 1 SENSORY Aktywne np. rezystancyjne Pasywne np. elektromagnetyczne 2 1. A. Gajek, Z. Juda: Czujniki. Wydawnictwa Komunikacji i Łączności, Warszawa, 2008. Literatura 2. D. Schmidt (edytor): Mechatronika.
1 SENSORY Aktywne np. rezystancyjne Pasywne np. elektromagnetyczne 2 1. A. Gajek, Z. Juda: Czujniki. Wydawnictwa Komunikacji i Łączności, Warszawa, 2008. Literatura 2. D. Schmidt (edytor): Mechatronika.
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Silniki synchroniczne
 Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Dalmierze elektromagnetyczne
 Dalmierze elektromagnetyczne Dalmierze elektromagnetyczne klasyfikacja i zasada działania Klasyfikacja dalmierzy może być dokonywana przy założeniu rozmaitych kryteriów. Zazwyczaj przyjmuje się dwa. 1.
Dalmierze elektromagnetyczne Dalmierze elektromagnetyczne klasyfikacja i zasada działania Klasyfikacja dalmierzy może być dokonywana przy założeniu rozmaitych kryteriów. Zazwyczaj przyjmuje się dwa. 1.
Badania charakterystyki wyrobu i metody badawcze. Kompatybilność elektromagnetyczna Odporność uzbrojenia na wyładowania elektrostatyczne.
 Zakres akredytacji OiB dla Laboratorium Badań Kompatybilności Elektromagnetycznej i Pomiarów Pól Elektromagnetycznych (LBEMC) Nr 27/MON/2014 wydany przez Wojskowe Centrum Normalizacji, Jakości i Kodyfikacji
Zakres akredytacji OiB dla Laboratorium Badań Kompatybilności Elektromagnetycznej i Pomiarów Pól Elektromagnetycznych (LBEMC) Nr 27/MON/2014 wydany przez Wojskowe Centrum Normalizacji, Jakości i Kodyfikacji
Badanie napędu z silnikiem bezszczotkowym prądu stałego
 Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
Badanie napędu z silnikiem bezszczotkowym prądu stałego Instrukcja do ćwiczenia Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sposobem sterowania 3- pasmowego silnika bezszczotkowego
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Ćwiczenie EA1 Silniki wykonawcze prądu stałego
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA1 Silniki wykonawcze prądu stałego Program ćwiczenia: A Silnik wykonawczy elektromagnetyczny 1. Zapoznanie się
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA1 Silniki wykonawcze prądu stałego Program ćwiczenia: A Silnik wykonawczy elektromagnetyczny 1. Zapoznanie się
Pomiar wielkości nieelektrycznych: temperatury, przemieszczenia i prędkości.
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych CięŜkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie E3 - protokół Pomiar wielkości nieelektrycznych: temperatury, przemieszczenia i
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych CięŜkich PW Laboratorium Elektrotechniki i Elektroniki Ćwiczenie E3 - protokół Pomiar wielkości nieelektrycznych: temperatury, przemieszczenia i
Sterowanie układem zawieszenia magnetycznego
 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Magnetycznie uruchamiany czujnik przemieszczenia liniowego WIM100-Q25L-LIU5X2-H1141
 Prostopadłościenny, aluminium / tworzywo sztuczne Różne możliwości montażu wskazanie pomiaru za pomocą diod LED całkowita odporność na zewnętrzne pola magnetyczne wyjątkowo małe strefy martwe 4-przewodowy,
Prostopadłościenny, aluminium / tworzywo sztuczne Różne możliwości montażu wskazanie pomiaru za pomocą diod LED całkowita odporność na zewnętrzne pola magnetyczne wyjątkowo małe strefy martwe 4-przewodowy,
Cel ćwiczenia. Przetwornik elektromagnetyczny. Silniki krokowe. Układ sterowania napędu mechatronicznego z silnikiem krokowym.
 KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN POLITECHNIKA OPOLSKA Cel ćwiczenia Zapoznanie się z budową i zasadą działania silnika krokowego. MECHATRONIKA Instrukcja do ćwiczeń laboratoryjnych Układ
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej.
 Szkoły Policealnej Zawodowej.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Pytania podstawowe dla studentów studiów II-go stopnia kierunku Elektrotechnika VI Komisji egzaminów dyplomowych
 Pytania podstawowe dla studentów studiów II-go stopnia kierunku Elektrotechnika VI Komisji egzaminów dyplomowych 0 Podstawy metrologii 1. Co to jest pomiar? 2. Niepewność pomiaru, sposób obliczania. 3.
Pytania podstawowe dla studentów studiów II-go stopnia kierunku Elektrotechnika VI Komisji egzaminów dyplomowych 0 Podstawy metrologii 1. Co to jest pomiar? 2. Niepewność pomiaru, sposób obliczania. 3.
Defektoskop ultradźwiękowy
 Ćwiczenie nr 1 emat: Badanie rozszczepiania fali ultradźwiękowej. 1. Zapoznać się z instrukcją obsługi defektoskopu ultradźwiękowego na stanowisku pomiarowym.. Wyskalować defektoskop. 3. Obliczyć kąty
Ćwiczenie nr 1 emat: Badanie rozszczepiania fali ultradźwiękowej. 1. Zapoznać się z instrukcją obsługi defektoskopu ultradźwiękowego na stanowisku pomiarowym.. Wyskalować defektoskop. 3. Obliczyć kąty
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH
 POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 2 Prawo autorskie Niniejsze
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMST Semestr letni Wykład nr 2 Prawo autorskie Niniejsze
Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego
 Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Badane cechy i metody badawcze/pomiarowe
 Zakres akredytacji dla Laboratorium Badań Kompatybilności Elektromagnetycznej i Pomiarów Pól Elektromagnetycznych (LBEMC) Nr AB 171 wydany przez Polskie Centrum Akredytacji ważny do 16 maja 2018 r. Badane
Zakres akredytacji dla Laboratorium Badań Kompatybilności Elektromagnetycznej i Pomiarów Pól Elektromagnetycznych (LBEMC) Nr AB 171 wydany przez Polskie Centrum Akredytacji ważny do 16 maja 2018 r. Badane
Maszyny Elektryczne Specjalne Special Electrical Machines. Elektrotechnika I stopień ogólnoakademicki. niestacjonarne
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod Nazwa Nazwa w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Maszyny Elektryczne
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod Nazwa Nazwa w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Maszyny Elektryczne
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Podstawy Automatyki laboratorium
 Cel ćwiczenia: Celem ćwiczenia jest uzyskanie wykresów charakterystyk skokowych członów róŝniczkujących mechanicznych i hydraulicznych oraz wyznaczenie w sposób teoretyczny i graficzny ich stałych czasowych.
Cel ćwiczenia: Celem ćwiczenia jest uzyskanie wykresów charakterystyk skokowych członów róŝniczkujących mechanicznych i hydraulicznych oraz wyznaczenie w sposób teoretyczny i graficzny ich stałych czasowych.
PRĄDNICE I SILNIKI. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
Technik elektronik 311[07] moje I Zadanie praktyczne
![Technik elektronik 311[07] moje I Zadanie praktyczne](/thumbs/40/20560007.jpg "Technik elektronik 311[07] moje I Zadanie praktyczne") 1 Technik elektronik 311[07] moje I Zadanie praktyczne Firma produkująca sprzęt medyczny, zleciła opracowanie i wykonanie układu automatycznej regulacji temperatury sterylizatora o określonych parametrach
1 Technik elektronik 311[07] moje I Zadanie praktyczne Firma produkująca sprzęt medyczny, zleciła opracowanie i wykonanie układu automatycznej regulacji temperatury sterylizatora o określonych parametrach
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Ćwiczenie EA9 Czujniki położenia
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA9 Program ćwiczenia I. Transformator położenia kątowego 1. Wyznaczenie przekładni napięciowych 2. Pomiar napięć
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA9 Program ćwiczenia I. Transformator położenia kątowego 1. Wyznaczenie przekładni napięciowych 2. Pomiar napięć
PL B1. WOJSKOWY INSTYTUT MEDYCYNY LOTNICZEJ, Warszawa, PL BUP 23/13
 PL 222455 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222455 (13) B1 (21) Numer zgłoszenia: 399143 (51) Int.Cl. H02M 5/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 222455 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 222455 (13) B1 (21) Numer zgłoszenia: 399143 (51) Int.Cl. H02M 5/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Pomiary drogi (przemieszczenia) i kąta [5]
![Pomiary drogi (przemieszczenia) i kąta [5]](/thumbs/18/769469.jpg "Pomiary drogi (przemieszczenia) i kąta [5]") Pomiary drogi (przemieszczenia) i kąta [5] Metody potencjometryczne Odwzorowanie wielkości wejściowej (droga, kąt) w zmianę oporności (R(x)). Obiekt pomiaru łączony jest bezpośrednio lub za pomocą przekładni
Pomiary drogi (przemieszczenia) i kąta [5] Metody potencjometryczne Odwzorowanie wielkości wejściowej (droga, kąt) w zmianę oporności (R(x)). Obiekt pomiaru łączony jest bezpośrednio lub za pomocą przekładni
Zastosowanie ultradźwięków w technikach multimedialnych
 Zastosowanie ultradźwięków w technikach multimedialnych Janusz Cichowski, p. 68 jay@sound.eti.pg.gda.pl Katedra Systemów Multimedialnych, Wydział Elektroniki Telekomunikacji i Informatyki, Politechnika
Zastosowanie ultradźwięków w technikach multimedialnych Janusz Cichowski, p. 68 jay@sound.eti.pg.gda.pl Katedra Systemów Multimedialnych, Wydział Elektroniki Telekomunikacji i Informatyki, Politechnika
KRÓTKA INFORMACJA Czujniki kąta skrętu Czujniki proste i podwójne
 KRÓTKA INFORMACJA Czujniki kąta skrętu Czujniki proste i podwójne Czujniki proste lub ilorazowe Duża dokładność dzięki wewnętrznej rozdzielczości 14 bitów Wysoka stabilność temperaturowa i liniowość Duża
KRÓTKA INFORMACJA Czujniki kąta skrętu Czujniki proste i podwójne Czujniki proste lub ilorazowe Duża dokładność dzięki wewnętrznej rozdzielczości 14 bitów Wysoka stabilność temperaturowa i liniowość Duża
Ćwiczenie 8. BADANIE MASZYN PRĄDU STAŁEGO STANOWISKO I. Badanie silnika bocznikowego
 Laboratorium elektrotechniki Ćwiczenie 8. BADANIE MASZYN PRĄDU STAŁEGO STANOWISKO I. Badanie silnika bocznikowego 0 V L L+ + Łącznik tablicowy V A A m R r R md Autotransformator E 0 V~ E A M B 0 0 V Bezdotykowy
Laboratorium elektrotechniki Ćwiczenie 8. BADANIE MASZYN PRĄDU STAŁEGO STANOWISKO I. Badanie silnika bocznikowego 0 V L L+ + Łącznik tablicowy V A A m R r R md Autotransformator E 0 V~ E A M B 0 0 V Bezdotykowy
MiAcz3. Elektryczne maszynowe napędy wykonawcze
 MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
MiAcz3 Elektryczne maszynowe napędy wykonawcze Spis Urządzenia nastawcze. Silniki wykonawcze DC z magnesami trwałymi. Budowa. Schemat zastępczy i charakterystyki. Rozruch. Bieg jałowy. Moc. Sprawność.
ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU
 P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
Przetworniki pomiarowe obrotu i przesunięcia liniowego
 Numer zamówieniowy: typ kołnierz i otwór pod wał względnie wał 14 = kołnierz synchro z otworem pod wał 12 mm 25 = kołnierz zaciskowy z wałem 12 mm 26 = kołnierz zaciskowy z wałem 12 mm i adapterem mocowanym
Numer zamówieniowy: typ kołnierz i otwór pod wał względnie wał 14 = kołnierz synchro z otworem pod wał 12 mm 25 = kołnierz zaciskowy z wałem 12 mm 26 = kołnierz zaciskowy z wałem 12 mm i adapterem mocowanym
Badziak Zbigniew Kl. III te. Temat: Budowa, zasada działania oraz rodzaje mierników analogowych i cyfrowych.
 Badziak Zbigniew Kl. III te Temat: Budowa, zasada działania oraz rodzaje mierników analogowych i cyfrowych. 1. MIERNIKI ANALOGOWE Mierniki magnetoelektryczne. Miernikami magnetoelektrycznymi nazywamy mierniki,
Badziak Zbigniew Kl. III te Temat: Budowa, zasada działania oraz rodzaje mierników analogowych i cyfrowych. 1. MIERNIKI ANALOGOWE Mierniki magnetoelektryczne. Miernikami magnetoelektrycznymi nazywamy mierniki,
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Badania elementów i zespołów maszyn laboratorium (MMM4035L) Zastosowanie systemu nawigacyjnego w pomiarach geometrii elementów maszyn. Ćwiczenie 22.
 Zastosowanie systemu nawigacyjnego w pomiarach geometrii elementów maszyn. Ćwiczenie 22.") Badania elementów i zespołów maszyn laboratorium (MMM4035L) Ćwiczenie 22. Zastosowanie systemu nawigacyjnego w pomiarach geometrii Przygotowanie: Ewelina Świątek-Najwer Wstęp teoretyczny: Rodzaje systemów
Badania elementów i zespołów maszyn laboratorium (MMM4035L) Ćwiczenie 22. Zastosowanie systemu nawigacyjnego w pomiarach geometrii Przygotowanie: Ewelina Świątek-Najwer Wstęp teoretyczny: Rodzaje systemów
ĆWICZENIE 3. Badania właściwości modelu optoelektronicznego przetwornika przemieszczeń liniowych
 ĆWICZENIE 3 Badania właściwości modelu optoelektronicznego przetwornika przemieszczeń liniowych 1. Wprowadzenie Otwarte łącza optoelektroniczne są wykorzystywane w wielu nowoczesnych miernikach. W licznych
ĆWICZENIE 3 Badania właściwości modelu optoelektronicznego przetwornika przemieszczeń liniowych 1. Wprowadzenie Otwarte łącza optoelektroniczne są wykorzystywane w wielu nowoczesnych miernikach. W licznych
PL B1. Sposób i układ pomiaru całkowitego współczynnika odkształcenia THD sygnałów elektrycznych w systemach zasilających
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210969 (13) B1 (21) Numer zgłoszenia: 383047 (51) Int.Cl. G01R 23/16 (2006.01) G01R 23/20 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210969 (13) B1 (21) Numer zgłoszenia: 383047 (51) Int.Cl. G01R 23/16 (2006.01) G01R 23/20 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Podstawy transmisji sygnałów
 Podstawy transmisji sygnałów 1 Sygnał elektromagnetyczny Jest funkcją czasu Może być również wyrażony jako funkcja częstotliwości Sygnał składa się ze składowych o róznych częstotliwościach 2 Koncepcja
Podstawy transmisji sygnałów 1 Sygnał elektromagnetyczny Jest funkcją czasu Może być również wyrażony jako funkcja częstotliwości Sygnał składa się ze składowych o róznych częstotliwościach 2 Koncepcja
Indukcyjny czujnik przemieszczenia liniowego LI1000P0-Q25LM0-LIU5X3-H1151
 prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Indukcyjny czujnik przemieszczenia liniowego LI1000P0-Q25LM0-LIU5X3-H1151
 prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
prostopadłościenny, aluminium / tworzywo sztuczne Różne opcje montażowe Wskazania LED zakresu pomiarowego Odporność na zakłócenia elektromagnetyczne Wyjątkowo małe strefy martwe Rozdzielczość 12-bitowa
Katedra Metrologii i Systemów Diagnostycznych Laboratorium Metrologii II. 2013/14. Grupa: Nr. Ćwicz.
 Politechnika Rzeszowska Katedra Metrologii i Systemów Diagnostycznych Laboratorium Metrologii II WYZNACZANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH PRZETWORNIKÓW Grupa: Nr. Ćwicz. 9 1... kierownik 2...
Politechnika Rzeszowska Katedra Metrologii i Systemów Diagnostycznych Laboratorium Metrologii II WYZNACZANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH PRZETWORNIKÓW Grupa: Nr. Ćwicz. 9 1... kierownik 2...
Selsyny Budowa: uzwojenie pierwotne (wzbudzenia) zasilane jednofazowo; uzwojenia wtórne (synchronizacji) trzy uzwojenia przesunięte względem siebie o
 zasilane jednofazowo; uzwojenia wtórne (synchronizacji) trzy uzwojenia przesunięte względem siebie o") Selsyny Budowa: uzwojenie pierwotne (wzbudzenia) zasilane jednoazowo; uzwojenia wtórne (synchronizacji) trzy uzwojenia przesunięte względem siebie o kąt 10 Oprócz uzwojenia wzbudzenia mogą występować uzwojenia
Selsyny Budowa: uzwojenie pierwotne (wzbudzenia) zasilane jednoazowo; uzwojenia wtórne (synchronizacji) trzy uzwojenia przesunięte względem siebie o kąt 10 Oprócz uzwojenia wzbudzenia mogą występować uzwojenia
Systemy i Sieci Radiowe
 Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Magnetycznie uruchamiany czujnik przemieszczenia liniowego WIM100-Q25L-LIU5X2-H1141
 Prostopadłościenny, aluminium / tworzywo sztuczne Różne możliwości montażu wskazanie pomiaru za pomocą diod LED całkowita odporność na zewnętrzne pola magnetyczne wyjątkowo małe strefy martwe 4-przewodowy,
Prostopadłościenny, aluminium / tworzywo sztuczne Różne możliwości montażu wskazanie pomiaru za pomocą diod LED całkowita odporność na zewnętrzne pola magnetyczne wyjątkowo małe strefy martwe 4-przewodowy,
WAT - WYDZIAŁ ELEKTRONIKI INSTYTUT SYSTEMÓW ELEKTRONICZNYCH. Przedmiot: CZUJNIKI I PRZETWORNIKI Ćwiczenie nr 1 PROTOKÓŁ / SPRAWOZDANIE
 Grupa: WAT - WYDZIAŁ ELEKTRONIKI INSTYTT SYSTEMÓW ELEKTRONICZNYCH Przedmiot: CZJNIKI I PRZETWORNIKI Ćwiczenie nr 1 PROTOKÓŁ / SPRAWOZDANIE Temat: Przetworniki tensometryczne /POMIARY SIŁ I CIŚNIEŃ PRZY
Grupa: WAT - WYDZIAŁ ELEKTRONIKI INSTYTT SYSTEMÓW ELEKTRONICZNYCH Przedmiot: CZJNIKI I PRZETWORNIKI Ćwiczenie nr 1 PROTOKÓŁ / SPRAWOZDANIE Temat: Przetworniki tensometryczne /POMIARY SIŁ I CIŚNIEŃ PRZY
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
PL B1. AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE, Kraków, PL BUP 06/ WUP 06/17
 PL 226027 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226027 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 405218 (22) Data zgłoszenia: 02.09.2013 (51) Int.Cl.
PL 226027 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226027 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 405218 (22) Data zgłoszenia: 02.09.2013 (51) Int.Cl.
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
ScrappiX. Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni
 ScrappiX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Scrappix jest innowacyjnym urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni przedmiotów okrągłych
ScrappiX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Scrappix jest innowacyjnym urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni przedmiotów okrągłych
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH
 POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMNS Semestr zimowy studia niestacjonarne Wykład nr
POMIARY WIELKOŚCI NIEELEKTRYCZNYCH Dr inż. Eligiusz PAWŁOWSKI Politechnika Lubelska Wydział Elektrotechniki i Informatyki Prezentacja do wykładu dla EMNS Semestr zimowy studia niestacjonarne Wykład nr
DATAFLEX. Miernik momentu obrotowego DATAFLEX. Aktualizowany na bieżąco katalog dostępny na stronie www.ktr.com
 307 Spis treści 307 Opis urządzenia 309 Typ 16/10, 16/30, 16/50 310 Akcesoria: RADEX -NC sprzęgło do serwonapędów 310 Typ 22/20, 22/50, 22/100 311 Akcesoria: RADEX -NC sprzęgło do serwonapędów 311 Typ
307 Spis treści 307 Opis urządzenia 309 Typ 16/10, 16/30, 16/50 310 Akcesoria: RADEX -NC sprzęgło do serwonapędów 310 Typ 22/20, 22/50, 22/100 311 Akcesoria: RADEX -NC sprzęgło do serwonapędów 311 Typ
w diagnostyce medycznej III
 Technika ultradźwiękowa w diagnostyce medycznej SEMESTR VI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Technika ultradźwiękowa
Technika ultradźwiękowa w diagnostyce medycznej SEMESTR VI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Technika ultradźwiękowa
Silniki prądu stałego
 Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Wykład 4. Strumień magnetyczny w maszynie synchroniczne magnes trwały, elektromagnes. Magneśnica wirnik z biegunami magnetycznymi. pn 60.
 Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
WYDZIAŁ PPT / KATEDRA INŻYNIERII BIOMEDYCZNE D-1 LABORATORIUM Z MIERNICTWA I AUTOMATYKI Ćwiczenie nr 14. Pomiary przemieszczeń liniowych
 Cel ćwiczenia: Poznanie zasady działania czujników dławikowych i transformatorowych, w typowych układach pracy, określenie ich podstawowych parametrów statycznych oraz zbadanie ich podatności na zmiany
Cel ćwiczenia: Poznanie zasady działania czujników dławikowych i transformatorowych, w typowych układach pracy, określenie ich podstawowych parametrów statycznych oraz zbadanie ich podatności na zmiany
Czujnik ultradźwiękowy serii BKS+/BKS
 Produkty Czujniki i enkodery Czujniki ultradźwiękowe serii BKS+/BKS Czujnik widelcowy Rozdzielczość od 0.1mm do 0.025 mm Zakres detekcji 8mm ( ±4mm) - 35 mm (±17,5 mm) Wyjście analogowe, Push-Pull, IO-Link
Produkty Czujniki i enkodery Czujniki ultradźwiękowe serii BKS+/BKS Czujnik widelcowy Rozdzielczość od 0.1mm do 0.025 mm Zakres detekcji 8mm ( ±4mm) - 35 mm (±17,5 mm) Wyjście analogowe, Push-Pull, IO-Link
Czujnik ultradźwiękowy serii DBK 4+
 Produkty Czujniki i enkodery Czujniki ultradźwiękowe Czujnik ultradźwiękowy serii DBK 4+ Odległość nadajnik- odbiornik: 20-60mm Detekcja jednego i wielu arkuszy Możliwość patrzenia bokiem Możliwość ustawienia
Produkty Czujniki i enkodery Czujniki ultradźwiękowe Czujnik ultradźwiękowy serii DBK 4+ Odległość nadajnik- odbiornik: 20-60mm Detekcja jednego i wielu arkuszy Możliwość patrzenia bokiem Możliwość ustawienia
Karta charakterystyki online. WTB4S-3P5232H W4S-3 Inox Hygiene FOTOPRZEKAŹNIKI MINI
 Karta charakterystyki online WTBS-3P5232H WS-3 Inox Hygiene A B C D E F Rysunek może się różnić Informacje do zamówienia Typ Nr artykułu WTBS-3P5232H 586 Więcej wersji urządzeń i akcesoriów www.sick.com/ws-3_inox_hygiene
Karta charakterystyki online WTBS-3P5232H WS-3 Inox Hygiene A B C D E F Rysunek może się różnić Informacje do zamówienia Typ Nr artykułu WTBS-3P5232H 586 Więcej wersji urządzeń i akcesoriów www.sick.com/ws-3_inox_hygiene
Wykład 5. Piotr Sauer Katedra Sterowania i Inżynierii Systemów
 Serwonapędy w automatyce i robotyce Wykład 5 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Prądnica prądu stałego zasada działania e Blv sinαα Prądnica prądu stałego zasada działania Prądnica prądu
Serwonapędy w automatyce i robotyce Wykład 5 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Prądnica prądu stałego zasada działania e Blv sinαα Prądnica prądu stałego zasada działania Prądnica prądu
Badanie prądnicy prądu stałego
 POLTECHNKA ŚLĄSKA WYDZAŁ NŻYNER ŚRODOWSKA ENERGETYK NSTYTUT MASZYN URZĄDZEŃ ENERGETYCZNYCH LABORATORUM ELEKTRYCZNE Badanie prądnicy prądu stałego (E 18) Opracował: Dr inż. Włodzimierz OGULEWCZ 3 1. Cel
POLTECHNKA ŚLĄSKA WYDZAŁ NŻYNER ŚRODOWSKA ENERGETYK NSTYTUT MASZYN URZĄDZEŃ ENERGETYCZNYCH LABORATORUM ELEKTRYCZNE Badanie prądnicy prądu stałego (E 18) Opracował: Dr inż. Włodzimierz OGULEWCZ 3 1. Cel
PL B1. Układ do lokalizacji elektroakustycznych przetworników pomiarowych w przestrzeni pomieszczenia, zwłaszcza mikrofonów
 PL 224727 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224727 (13) B1 (21) Numer zgłoszenia: 391882 (51) Int.Cl. G01S 5/18 (2006.01) G01S 3/80 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 224727 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224727 (13) B1 (21) Numer zgłoszenia: 391882 (51) Int.Cl. G01S 5/18 (2006.01) G01S 3/80 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej