Zbigniew PAWELSKI. Modelowanie i obliczanie napędu hydrobusu
|
|
|
- Maksymilian Niewiadomski
- 8 lat temu
- Przeglądów:
Transkrypt
1 Zbigniew PAWELSKI Modelowanie i obliczanie napędu hydrobusu Monografie, Łódź 2000

2 2

3 3 SPIS TREŚCI str. Od autora... 4 Wykaz ważniejszych oznaczeń Układ napędowy hydrobusu w strukturze napędów hydrostatycznych Podstawy napędu z adaptacyjnym sterowaniem wtórnym Układ napędowy hydrobusu Dobór serwomechanizmów do obwodów regulacji Serwomechanizm położenia Serwomechanizm prędkości Serwomechanizm ciśnienia Dobór dynamiki podzespołu wychylenia tarczy Model silnika ZS z regulatorem R4E lub R4V Model układu sterowania prędkością pojazdu Model hydropneumatycznych akumulatorów energii Model napędu hydrostatycznego Podstawowe parametry podzespołów oraz wymagania przy uruchamianiu układu hydraulicznego Dobór silnika hydrostatycznego Dobór akumulatora energii Dobór zbiornika oleju Dobór oleju Filtrowanie w układzie hydraulicznym hydrobusu Hydrauliczne elementy logiczne sterujące przepływem cieczy PODSUMOWANIE LITERATURA 130 Summary.134

4 4 OD AUTORA Monografia swoim zakresem tematycznym dotyczy napędów hydrostatycznych ze sterowaniem przez zmianę geometrycznej objętości roboczej silnika, wyróżniających się specyficznymi własnościami dorównującymi regulowanemu napędowi elektrycznemu. Stosowanie takich napędów staje się korzystne wszędzie tam, gdzie konwencjonalny napęd hydrauliczny nie może już spełniać wymagań pod względem własności dynamicznych, dokładności regulacji prędkości obrotowej, pozycjonowania oraz możliwości odzysku energii bez dokonywania jej przemiany. Prototyp napędu hybrydowego zrealizowany wg tej koncepcji zamontowano w autobusie miejskim, wykorzystując podzespoły hydrostatyczne i sterujące firmy REXROTH. Dzięki życzliwości tej firmy możliwe było również zebranie informacji niezbędnych do uruchomienia hydrostatyki oraz układów sterowania w wersji: analogowej - korzystając z firmowych kart pomiarowo-sterujących oraz mikroprocesorowej - oprogramowując własnym programem handlowy sterownik mikroprocesorowy. W opracowaniu tym zwrócono uwagę na istotne punkty, które należało zachować podczas uruchamiania prototypu, i tak w: - w rozdziale 1 omówiono zasadę działania napędu hydrostatycznego ze sterowaniem przez zmianę objętości jednostkowej silnika w układzie z czynnym ciśnieniem, jego zalety oraz struktury układów sterowania, - w rozdziale 2 przedstawiono ocenę działania serwomechanizmów jako podzespołów wykonawczych, mogących pracować w trzech odmianach: położenia, prędkości i siły, - w rozdziale 3 zaproponowano wskaźniki oceny układu wychylenia tarcz oporowych pozwalające zachować stabilność, - w rozdziale 4 omówiono model silnika wysokoprężnego z różnymi regulatorami obrotów w pompie paliwa, - w rozdziale 6 omówiono model hydropneumatycznych akumulatorów energii, - w rozdziale 7 zaproponowano model napędu hydrostatycznego hydrobusu, - w rozdziale 8 przedstawiono dobór podstawowych parametrów układu napędowego oraz wymagania stawiane przy uruchamianiu napędu hydrostatycznego. Obserwowany w ostatnim okresie rozwój elektroniki miał znaczący wpływ na zmiany w hydrostatycznych układach sterujących, które mając obecnie wejścia elektroniczne umożliwiają zastosowanie napędów hydrostatycznych w układach zautomatyzowanych, sterowanych za pomocą mikroprocesorów. Wymaga to umiejętności tworzenia modeli dynamicznych podzespołów i układów napędowych oraz ich weryfikacji. Stąd wydawało się pożądane, aby wieloletnie prace teoretyczne i doświadczalne zostały przekazane za pomocą niniejszego opracowania, które może

5 5 okazać się pomocne dla inżynierów i studentów wydziałów mechanicznych oraz elektrycznych, zajmujących się podobną tematyką. Główny nacisk położono na realizację układu sterowania i te dane układu hydrostatycznego, od których zależą parametry regulatorów. Pomimo nieliniowego w rzeczywistości obiektu badań, okazało się wystarczające posługiwanie się danymi modelu zlinearyzowanego dla zachowania stabilności. Zebrany materiał to wynik kilkuletnich prac, możliwych dzięki finansowaniu ich przez Komitet Badań Naukowych w latach w ramach Projektów: , 9 S , 9 T 12C , przez co zaistniała możliwość rozwijania własnych zainteresowań. Tą drogą pragnę złożyć podziękowanie za okazaną pomoc. W spisie literatury zamieszczono tylko najważniejsze pozycje, dostępne w miejscowych bibliotekach. Większość informacji uzyskano z licznych cząstkowych publikacji naukowych, materiałów katalogowych i prospektów głównie firmy REXROTH oraz opracowań konferencyjnych. Szczególnie gorące podziękowanie pragnę złożyć Recenzentom książki Panom: Profesorowi Janowi Osieckiemu oraz Profesorowi Leonowi Prochowskiemu za bardzo wnikliwe i przychylne recenzje wydawnicze oraz wskazanie możliwości rozwinięcia pracy. Ich opinie miały znaczący wpływ na treści zawarte w tej książce. Przyjmuję z wdzięcznością wszelkie uwagi krytyczne zarówno co do treści jak i sposobu jej ujęcia, przewidując uwzględnienie ich w następnych swoich pracach. Mam nadzieję, że monografia ta pozwoli Czytelnikowi odpowiedzieć na wiele pytań pojawiających się przy uruchamianiu nowych lub podobnych napędów hydrostatycznych. Oczywiście na wiele pytań nie odpowiedziałem. Mając jednak uruchomiony prototyp, jest tylko kwestią czasu i możliwości by poszukać odpowiedzi. Zapraszam do współpracy. Łódź, grudzień 1999 r. Zbigniew Pawelski

6 6 WYKAZ WAŻNIEJSZYCH OZNACZEŃ A - powierzchnia przekroju poprzecznego cylindra siłownika, m 2 A n - amplituda n-tej harmoniki szeregu Fouriera, m B - współczynnik tarcia wiskotycznego, Ns/m. d L - współczynnik tłumienia w siłowniku, d V - współczynnik tłumienia w serwozaworze, e - sygnał uchybu, V E - moduł sprężystości oleju, kg/m*s 2 E s - siła napięcia wstępnego sprężyn regulatora, N F d - siła oporu technologicznego, N F o - siła odśrodkowa wirujących ciężarków, N G e - godzinowe zużycie paliwa przez silnik spalinowy, kg/h H - skok siłownika, m i - natężenie prądu w serwozaworze, ma i r - znamionowe natężenie prądu w serwozaworze, ma J g - zredukowany na oś tarczy oporowej masowy moment bezwładności, kgm 2 K p - wzmocnienie ciśnienia w serwozaworze, MPa/mA K PI - wzmocnienie regulatora PI, ma/v K Q - wzmocnienie natężenia przepływu w serwozaworze, m 3 /s/ma K pq - ciśnieniowe wzmocnienie natężenia przepływu; K pq =K Q /K p, m 3 /s/mpa K t - sztywność napędu, N/m K X - wzmocnienie sygnału przetwornika położenia, V/m. K V - wzmocnienie sygnału przetwornika prędkości, V/m/s K fp - wzmocnienie sygnału przetwornika ciśnienia, V/MPa K VX - wzmocnienie prędkości pętli w serwomechanizmie położenia, s K VV - wzmocnienie prędkości pętli w serwomechanizmie prędkości, s K Vp - wzmocnienie prędkości pętli w serwomechanizmie ciśnienia (siły), s L p - indukcyjność cewek silnika momentowego w serwozaworze, H m - zredukowana masa zespołu tłoczyska siłownika, kg M i - moment obrotowy na wale elementu i, Nm M 2max - maksymalny moment obrotowy na wale silnika hydrostatycznego, Nm M T - moment obrotowy od sił tarcia, Nm M L - zredukowany moment obrotowy od obciążenia, Nm q - objętość jednostkowa (geometryczna wydajność bądź chłonność) maszyny hydrostatycznej, m 3 /rad q - dawka jednostkowa pompy paliwowej, mm 3 /wtrysk q 2max - maksymalna chłonność jednostkowa, m 3 /rad Q - natężenie przepływu oleju, m 3 /s

7 7 Q r - znamionowe natężenie przepływu w serwozaworze, m 3 /s p i - ciśnienie, MPa p s - ciśnienie zasilania układu, MPa p - ciśnienie robocze, MPa p d - spadek ciśnienia na skutek przecieku w serwozaworze i siłowniku, MPa p u - niepewność sygnału wyjściowego w serwomechanizmie ciśnienia, MPa r 1 - promień środka masy ciężarka odpowiadający napięciu wstępnemu, m. r o - promień środka masy ciężarka odpowiadający prędkości kątowej biegu jałowego, m R L - opory przesuwu elementu sterującego, N R p - rezystancja cewek silnika momentowego w serwozaworze, R w - rezystancja stopnia wyjściowego wzmacniacza, R xy - korelacja wzajemna sygnałów, S xx - gęstość widmowa mocy sygnału, t 1 - czas powstania maksymalnej odchyłki prędkości kątowej wału silnika hydrostatycznego, s T - stała czasowa, s T op - czas zwłoki w przebiegu momentu obrotowego jednostki hydrostatycznej, s T wych - czas wychylenia tarczy oporowej w jednostce hydrostatycznej, s T L - czas narastania momentu obciążenia, s T R - współczynnik czasu obiektu regulacji, s T N - czas zdwojenia regulatora PI, s T V - czas wyprzedzenia regulatora PD, s U - napięcie, V U 1 - sygnał sterujący zadany, V U 2 - sygnał sprzężenia zwrotnego, V V - prędkość tłoczyska siłownika, m/s V max - maksymalna prędkość tłoczyska siłownika, m/s V f - uchyb prędkości, m/s X - przemieszczenie tłoczyska siłownika, m X u - niepewność sygnału wyjściowego w serwomechanizmie położenia, m X f - nadążny uchyb położenia, m y - przesunięcie elementu sterującego wielkością dawki w pompie, mm y 1 - przesunięcie listwy w pompie zależne od położenia pedału przyspiesznika, mm y 2 - przesunięcie listwy w pompie zależne od ugięcia sprężyn w regulatorze, mm - kąt wychylenia tarczy oporowej w silniku, rad p. - kąt wychylenia tarczy oporowej w pompie, rad n - kąt fazowy n-tej harmoniki szeregu Fouriera, rad x - wartość średnia sygnału, z - zredukowany współczynnik tłumienia lepkiego, Ns/m - gęstość paliwa, kg/m 3

8 8 - wariancja procesu stochastycznego, xy 2 - funkcja koherencji dwóch sygnałów, i - prędkość kątowa elementu i, rad/s - przyrost prędkości kątowej, rad/s L - częstotliwość własna obciążenia, 1/s V - częstotliwość własna serwozaworu, 1/s o - podstawowa częstotliwość szeregu, 1/s p. - prędkość kątowa wałka pompy, rad/s - ustawienie elementu sterującego w zaworze. n 2

9 9 1. UKŁAD NAPĘDOWY HYDROBUSU W STRUKTURZE NAPĘDÓW HYDROSTATYCZNYCH Ogrom inwestycji drogowych związany z rozwojem motoryzacji wymaga przemieszczania dużych ilości mas ziemnych, co było i jest motorem rozwoju odpowiednich maszyn [2]. Pojawienie się pierwszej samobieżnej maszyny gąsienicowej, zaprezentowanej przez Benjamina Holta 4 listopada 1904 roku wyznacza początek nowej ery rozwoju maszyn do robót ziemnych. W latach 20-tych i 30-tych ciągniki gąsienicowe zrewolucjonizowały wielkie komunikacyjne budowy na kontynencie amerykańskim, wypierając z nich konie. Wprowadzenie w 1949 roku po raz pierwszy przez firmę Allis-Chalmers do seryjnie produkowanej spycharki HD-19 przekładni hydrokinetycznej, stanowi początek trwającej do dziś ery napędów hydrokinetycznych ze skrzynią typu power shift. Rozwiązanie to zabezpiecza silnik przed zgaszeniem oraz umożliwia przełączanie biegów bez nadmiernych obciążeń dynamicznych, kosztem niższej sprawności skrzyni w porównaniu z czysto mechaniczną. Napęd hydrostatyczny, wprowadzony do produkowanych seryjnie spycharek gąsienicowych przez firmę Liebherr w 1968 roku, zaczął powoli zajmować miejsce napędu hydrokinetycznego, wchodząc do maszyn większości światowych producentów. Przekładnia hydrostatyczna eliminuje całkowicie konieczność przełączania biegów oraz w sposób ustalony obciąża silnik spalinowy. Niewątpliwe zalety eksploatacyjne tej przekładni ułatwiające pracę operatora oraz umożliwiające wprowadzenie sterowań mikroprocesorowych, optymalizujących parametry pracy, prowadzą do znaczących efektów wydajnościowych potwierdzonych testami przeprowadzonymi m.in. w OBRMZiT Stalowa Wola na różnych spycharkach. Przykładowo spycharka SC-15HS wyposażona w hydrostatyczny układ napędu jazdy oraz układ roboczy z hydrauliką load sensing jest około 30% wydajniejsza od spycharek z napędem hydrokinetycznym [2]. W napędach hydrostatycznych występuje przemiana energii mechanicznej na hydrauliczną, którą można łatwo przenosić, sterować i rozdzielać, aby następnie w siłownikach lub silnikach ponownie zamieniać na energię mechaniczną. Jeżeli pompa zasila kilka odbiorników sterowanych zaworami, to w niekorzystnych warunkach eksploatacji występują znaczne straty energii w postaci strat dławienia, powodujących nagrzewanie się cieczy roboczej. Takie stany robocze występują również w obszarze częściowego obciążenia, a więc gdy pompa tłoczy więcej cieczy niż potrzebują odbiorniki, lub gdy nastawione ciśnienie na wyjściu pompy jest wyższe od wartości wymaganej przez odbiornik. Z punktu widzenia gospodarki energetycznej wskazanym jest, by moc wyjściową napędu (wydajność pompy ciśnienie) można było dopasować do zapotrzebowania, np. układy z kompensacją ciśnienia od obciążenia load sensing

10 10 oraz układy z adaptacyjnym sterowaniem wtórnym silnika. Przegląd możliwych rodzajów napędu zestawiono na rys.1.1 [6,44,56]. Rys.1.1. Rodzaje napędów hydrostatycznych W ostatnich latach zaznaczył się szybki rozwój i wzrost zastosowań napędów hydrostatycznych, w którym można wyróżnić cztery obszary: * hydraulikę stacjonarną ogólnego przeznaczenia, * hydraulikę mobilną, * hydraulikę okrętową, * hydraulikę lotniczą. Każda z tych dziedzin wymusza odpowiedni rozwój elementów i specjalistycznych układów, zależnych od: wykonywanych funkcji, bezpieczeństwa, wymogów ekologicznych i ekonomicznych. Zalety napędów hydrostatycznych spowodowały, że nastąpiło wypieranie napędów mechanicznych i elektrycznych z wielu zastosowań. Przykładowo w Niemczech produkcja elementów hydraulicznych w roku 1990 w stosunku do 1980 wzrosła ponad dwukrotnie przy 50% wzroście produkcji globalnej w przemyśle maszynowym [13,24]. Do najważniejszych odbiorców hydrauliki należą maszyny budowlane, maszyny drogowe, maszyny wydobywcze, maszyny rolnicze. Jak wynika z rys.1.2 w Niemczech


11 11 aż 38% produkcji elementów hydraulicznych znajduje zastosowanie w mobilnej hydraulice maszyn roboczych, a w 62% w hydraulice stacjonarnej. Rys.1.2. Zastosowanie hydrauliki w budowie maszyn w Niemczech wg VDMA w 1990 r. Rozwój układów hydrostatycznych w maszynach wynika z dążenia producentów do jak najpełniejszego zaspokojenia wymagań klienta oraz z rozszerzającej się oferty zespołów hydraulicznych. Rywalizacja na rynku maszyn wymaga doskonalenia ich konstrukcji by nadążyć rozwiązaniami za poziomem konkurencji. Stałe śledzenie rozwiązań jak również zmieniającej się oferty dostawców zespołów stanowi jeden z najważniejszych warunków powodzenia rynkowego, a powiązanie działań producenta maszyn z producentem zespołów hydraulicznych oferujących komplementarne rozwiązania jest jedyną drogą [2]. Wprowadzenie rozwiązań energooszczędnych, umożliwiających ergonomiczną i bezpieczną pracę maszynami oraz chroniących środowisko naturalne, to wymóg rynków i zadanie dla każdego producenta. Rynek maszyn rządzący się prawami wolnej konkurencji nakłada na producentów obowiązek wypełnienia określonych uwarunkowań, zarówno obligatoryjnych (unormowania formalno-prawne) jak i techniczno-ekonomicznych decydujących o popycie na daną maszynę, a co za tym idzie jej rynkowym sukcesie. Rynek komponentów ukierunkowany jest na zaspokojenie wymagań producentów maszyn. Stąd wymagania stawiane maszynom finalnym (ergonomia pracy, ekonomiczność eksploatacji, podatność serwisowa, ekologia) mają jednoznaczne przełożenie na producenta zespołów, którego zadaniem jest utrzymanie stałego rozwoju swoich wyrobów i proponowanie nowych oryginalnych rozwiązań. Tendencje rozwojowe elementów hydraulicznych można zobrazować zestawieniem pokazanym na rys.1.3, z którego wynikają działania w trzech głównych grupach [13,24]:

12 12 Minimalizacja masy i zwiększenie mocy pozwalające na pozyskanie dużej gęstości mocy. Minimalizacja strat energii i zmniejszenie obciążenia środowiska. Poprawa sterowania, regulacji i obsługi maszyn z napędem hydraulicznym przez zwiększenie komfortu obsługi i uproszczenie czynności. Rys.1.3. Tendencje rozwojowe w hydraulice mobilnej Elementy hydrauliczne można podzielić na dwie podstawowe grupy: zawory i jednostki wyporowe, służące do przekształcenia energii. Na nowoczesny zawór, rys.1.4 [13,24], składają się: stopień hydrauliczny, przetwornik elektromechaniczny, system pomiaru przemieszczeń oraz regulator. Rozwój elementów idzie w dwóch kierunkach: wzrostu statycznych i dynamicznych możliwości przenoszenia mocy oraz integracji coraz większej ilości funkcji realizowanej w konstrukcji zaworu. Oznacza to, że stopień hydrauliczny musi być optymalizowany pod kątem kształtowania kanałów przepływowych i redukcji sił hydrodynamicznych. Wzrost możliwości przenoszenia mocy przez elektromechaniczny przetwornik musi oddziaływać na poprawę własności statycznych i dynamicznych zaworu. Standartowe wykonania zaworów sterowanych elektromagnetycznie posiadają dziś głównie magnesy proporcjonalne, które są tym lepsze im bardziej zbliżają się do liniowego przebiegu siły w funkcji drogi. Silniki liniowe są na razie stosowane głównie do sterowań zaworami w hydraulice lotniczej, ponieważ zbyt wysoka cena nie pozwala na szerokie wdrożenie w hydraulice przemysłowej i mobilnej. Zaletą tych rozwiązań jest pewność działania, duże skoki i stosunkowo duże siły przy małych gabarytach. Obserwując rozwój konstrukcji zaworów oraz ich sterowań można przewidzieć, że nastąpi dalsza integracja elektroniki w budowie oraz przejście na technikę cyfrową w układach regulacji. W przyszłości należy oczekiwać również inteligentnych,

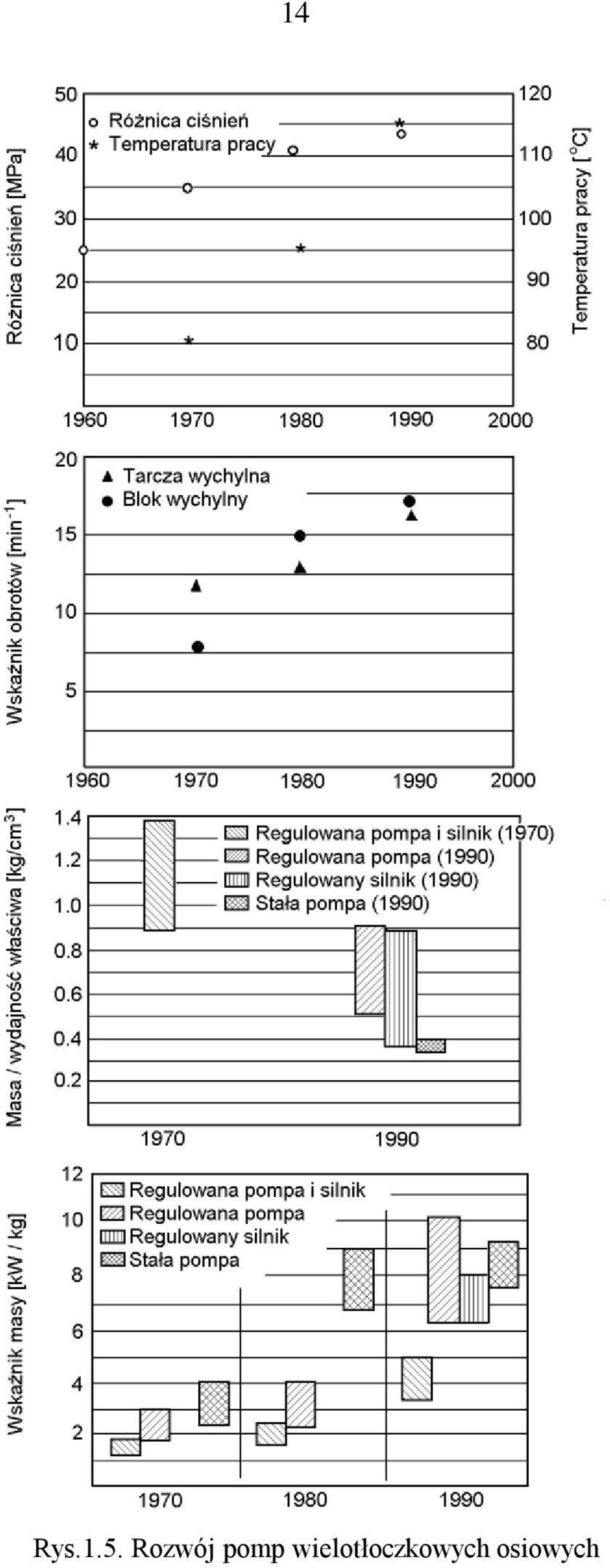
13 13 samodopasowujących się układów regulacji do parametrów elektrycznych, mechanicznych i hydraulicznych. Rys.1.4. Bezpośrednio sterowany rozdzielacz 4/3 Jednostki wyporowe, pompy i silniki hydrauliczne, służą do przetwarzania energii mechanicznej w energię ciśnienia cieczy i na odwrót. W maszynach roboczych znajdują zastosowanie zarówno jednostki o stałej jak i zmiennej wydajności. W układach hydraulicznych pracujących według zasad z optymalnymi parametrami, zainteresowanie konstruktorów idzie w kierunku jednostek o zmiennej wydajności. Przy konieczności zwiększania ciśnień w grę wchodzą jednostki wielotłoczkowe osiowe i promieniowe. Zaletą jednostek wielotłoczkowych osiowych jest możliwość pracy jako pompa lub silnik, które w dużym zakresie regulacji posiadają wysoką sprawność. Sprawności są wysokie i sięgają wartości 0.9. Rozwój tych jednostek pokazuje zestawienie parametrów i wskaźników na rys.1.5 [13,24], gdzie wartość wskaźnika mocy do masy wzrasta stale, przy 2 10 krotnym spadku wskaźnika masy do wydajności właściwej oraz przy w zasadzie stałych ciśnieniach pracy [MPa]. Utrzymanie tych granic ciśnień wynika z problemów związanych z drganiami i hałasem w hydraulice. Poprawianie konstrukcji to optymalizacja geometrii węzłów pod kątem uszczelnień, nowych pokryć powierzchni roboczych oraz zastosowanie wyższych ciśnień roboczych.

14 14 Rys.1.5. Rozwój pomp wielotłoczkowych osiowych
15 15 W hydraulicznych napędach jazdy obowiązuje dziś zasada, że gdy napęd spełnia rolę podrzędną to może być budowany jako obwód otwarty, natomiast w zadaniach podstawowych stosuje się układ zamknięty, między innymi po to, by móc przejmować funkcję hamowania. Zaletami napędów hydrostatycznych, obok dużej gęstości mocy, jest płynna i dokładna możliwość przechodzenia z pełnej prędkości jazdy w przód do jazdy wstecz. W napędach maszyn roboczych do 60 [kw] hydrostatyka zastąpiła w zasadzie inne rodzaje napędów. Przy niższych mocach stosuje się kombinacje: pompy regulowanej wydajności i stałego silnika. Przy wielkościach [kw] powracają koncepcje regulowanych silników hydraulicznych z włączalnymi przekładniami, zapewniającymi wielokrotne rozszerzenie zakresu regulacji. W tym obszarze przenoszenia mocy jako drugi typ napędów obserwuje się wprowadzanie zasady wielosilnikowej. Obok hydrostatycznych mechanizmów jazdy napęd hydrostatyczny posiada szereg zalet w zastosowaniu do mechanizmów roboczych maszyn i urządzeń. Wadą dotychczasowych konwencjonalnych rozwiązań było niewykorzystywanie optymalne mocy silnika napędowego. W ostatnich latach rozwinęły się dwa systemy: loadsensing i adaptacyjne sterowanie wtórne silnika hydraulicznego. Zadaniem systemów load-sensing jest oszczędność energii przez dopasowywanie natężenia przepływu z pompy do potrzeb odbiorników, z utrzymywaniem ciśnienia tak wysoko by najbardziej obciążony odbiornik był sterowalny. W tym celu pompa musi zapewnić ciśnienie o pewną wartość p LS wyższe od największego ciśnienia p L obciążenia odbiorników. Rys.1.6 przedstawia różne systemy load-sensing różniące się sposobem uzyskiwania wymaganej różnicy p LS [13,24]. Przy sterowaniu I różnica ciśnień uzyskiwana jest dzięki działaniu sprężyny (F F ) i pozostaje stała dla całego obszaru ciśnień obciążenia. Sprawność tego systemu bez uwzględniania sprawności pompy jest więc równa: LSI 1 1 p p a więc znacznie obniża się przy małych obciążeniach układu p L (krzywa I). Jeżeli uzyskuje się różnice ciśnień p LS według sterowania II, gdzie stosunek powierzchni sterujących wynosi k A2 / A1 1, to sprawność systemu pozostaje stała niezależnie od obciążenia: L LS 1.1 LSII k A A


16 16 Wadą tego rozwiązania jest proporcjonalna zależność różnicy ciśnień ciśnienia obciążenia p L : A1 p p k 1 p 1 A LSII L L L 2 p A A A p LS od 1.3 Prowadzi to do wystąpienia problemów przy małych obciążeniach, gdyż zawory regulujące jak i sterujące muszą pracować wtedy przy małych różnicach ciśnień, które mogą okazać się za małe do pokonania sił tarcia w load-sensing, będąc tym samym źródłem powstawania błędów w regulacji. Rys.1.6. Różne systemy load-sensing Rozwiązanie III przedstawia pewien kompromis, w którym sprężyna zapewnia minimalną różnicę ciśnień p min, a stosunek k powierzchni sterujących dodatkową różnicę ciśnień zależną od obciążenia: p p k p p A A LSIII L 1 L A 2 1 min min p

17 17 Sprawność dla tego przypadku jest korzystniejsza niż w rozwiązaniu I i można określić ją z zależności: 1 LSIII 1.5 pmin k p Kolejnym problemem systemów load-sensing jest zachowanie się napędu przy różnych zapotrzebowaniach odbiorników na natężenie przepływu, zwłaszcza gdy przekracza maksymalną wydajność pompy. Na rys.1.7 przedstawiono systemy regulacji natężenia przepływu w układach loadsensing wg dwóch sposobów, w tzw. sterowaniu pierwotnym i wtórnym, w których wagi ciśnienia znajdują się odpowiednio przed lub za rozdzielaczami. Rozdzielacze są tu przedstawione jako element dławiący, a obie wagi ciśnieniowe działają niezależnie od siebie. W normalnej pracy układu oba systemy nie wykazują żadnej różnicy w funkcjonowaniu. Odmienny sposób działania występuje w sytuacji zapotrzebowania na zwiększoną wydajność pompy, a mianowicie w przypadku układu pierwotnego zwalnia ten odbiornik, który ma największe obciążenie, natomiast w układzie wtórnym zwalniają w równych częściach oba odbiorniki. Aktualnie na rynku oferowane są oba systemy z korektami eliminującymi wskazane wady [13,24]. L Rys.1.7. Połączenia systemów load-sensing z niezależnie od obciążenia regulowanymi natężeniami przepływu. Na rys.1.8 przedstawiono koncepcję przyszłościową układów load-sensing z podziałem na dwie części: hydromechaniczną i elektrohydrauliczną. Straty mocy w

18 18 układach wynikają dziś z konieczności występowania niezbędnej różnicy ciśnień p LS, porównywanej z siłą sprężyny zaworu regulującego wydajność pompy. Jak wynika z rys.1.8 dalszy rozwój to powiązanie różnicy p LS z ciśnieniem obciążenia. W układach elektrohydraulicznych można to stosunkowo prosto uzyskać przez zastosowanie czujników ciśnienia, kombinacje czujników prędkości obrotowych lub liniowych i przemieszczeń suwaka zaworu. Jest więc możliwe utrzymanie p LS jako stałe lub zredukowane do zera, a przyszłość okaże, który z systemów najbardziej będzie odpowiadał wymaganiom klientów [13,24]. Rys.1.8. Rozwój układów load sensing W hydrostatyce rozróżnia się dwie koncepcje napędu: * konwencjonalny, ze sprzężeniem przez natężenie przepływu, * z adaptacyjnym sterowaniem wtórnym, ze sprzężeniem przez ciśnienie. Konwencjonalna przekładnia hydrostatyczna składa się z pompy hydraulicznej zmiennego wydatku z obustronnie wychylną tarczą oraz silnika ze stałą objętością geometryczną lub zmienną objętością geometryczną z jednostronnie wychylną tarczą, rys.1.9 [13,24]. Napędzana z prędkością kątową 1 pompa hydrauliczna o objętości jednostkowej (geometrycznej) q 1 wytwarza teoretyczne natężenie przepływu Q: Q q 1 1 max 1max 1 1.6
![Jest więc możliwe utrzymanie p LS jako stałe lub zredukowane do zera, a przyszłość okaże, który z systemów najbardziej będzie odpowiadał wymaganiom klientów [13,24]. Rys.1.8.](/docs-images/40/1297301/images/page_18.jpg "Rozwój układów load sensing W hydrostatyce rozróżnia się dwie koncepcje napędu: * konwencjonalny, ze sprzężeniem przez natężenie przepływu, * z adaptacyjnym sterowaniem wtórnym, ze sprzężeniem przez")
19 19 i wymusza na silniku o chłonności jednostkowej q 2 prędkość kątową 2: gdzie: 2 1 q q max 1 - kąt wychylenia tarczy oporowej w pompie, pozostałe oznaczenia bez zmian, jak na rys Na zmianę momentu obrotowego M 2 przy odbiorniku układ hydrauliczny reaguje zmianą ciśnienia p: M2 q2 p 1.8 Mamy tu do czynienia z tzw. sprężyną hydrauliczną, która niekorzystnie wpływa na stabilność układu podczas procesów dynamicznych. Ponadto energia hamowania silnika (jednostki wtórnej) musi zostać podparta pompą lub na zaworach dławiących, o ile to możliwe. Wynikają stąd następujące konsekwencje: * energia hamowania jest bezpowrotnie tracona (negatywny bilans energetyczny), * wytworzone ciepło podczas hamowania musi zostać odebrane, co wymusza zwiększenie układu chłodzącego (dodatkowe koszty). Rys.1.9. Zasada budowy konwencjonalnego napędu hydrostatycznego
, * wytworzone ciepło podczas hamowania musi zostać odebrane, co wymusza")
20 Podstawy napędu z adaptacyjnym sterowaniem wtórnym Oryginalnym rozwiązaniem, proponowanym głównie dla mechanizmów roboczych jest układ z adaptacyjnym sterowaniem wtórnym. Układ ten składa się z trzech podstawowych elementów: pompy o zmiennej objętości geometrycznej, akumulatora hydraulicznego i jednostki wtórnej o zmiennej chłonności geometrycznej. Przekładnia ta różni się od konwencjonalnej tym, że ciśnienie p układu zależne jest od stanu naładowania akumulatora a nie od wartości momentu M 2 obciążającego silnik hydrauliczny, rys Zadaniem pompy jest utrzymywanie stałego ciśnienia w sieci hydraulicznej. Funkcja ta może być podparta przez akumulator hydrauliczny, który: * wygładza uderzenia ciśnienia w układzie przy szybkiej zmianie obciążenia jednego lub wielu odbiorników, * magazynuje energię hamowania, * oddaje energię zmagazynowaną przy jej podwyższonym zapotrzebowaniu przez odbiornik. Rys Układ napędowy ze sprzężeniem przez ciśnienie

21 21 Dopasowanie się momentu obrotowego M 2 w układzie napędowym sterowanym prędkością kątową 2 zachodzi przy jednostce wtórnej przez zmianę chłonności jednostkowej q 2. Strumień objętości Q jednostki wtórnej, przy stałym ciśnieniu w układzie i stałej prędkości kątowej 2, jest proporcjonalny do kąta wychylenia 2 tarczy oporowej, a tym samym do momentu obrotowego M 2 : M p q 2 2 max 2 2 max 1.9 Przez zmianę objętości jednostkowej q 2 uzyskuje się więc dopasowanie momentu obrotowego M 2 do warunków obciążenia, a na natężenie przepływu Q, określające wyjściową prędkość kątową 2, nie powinien mieć wpływu element dławiący. Niezbędna jest jednostka hydrauliczna umożliwiająca zmianę objętości (chłonności) jednostkowej w zakresie < -q 2max q 2max >, która pracując jako silnik pobiera wynikający z objętości jednostkowej q 2 strumień o natężeniu Q, a pracując jako pompa taki strumień wytwarza. Zaletami tego rodzaju napędu są: * możliwość rekuperacji energii, * centralne zasilanie wielu odbiorników, * brak dodatkowego układu chłodzenia, * brak ciśnień szczytowych i duże przyspieszenia układu, * oszczędności w zainstalowanej mocy pompy. Wadami są natomiast: * koszty układu związane z zastosowaniem akumulatorów hydraulicznych oraz sterowalnej jednostki wtórnej, * brak kontroli przy awarii elektroniki. Zastosowanie napędu hydrostatycznego z adaptacyjnym sterowaniem wtórnym jest korzystne wszędzie tam, gdzie [17,19]: Różne odbiorniki pracują równolegle, w kolejności, oraz istnieje możliwość odzysku energii od tych jednostek, które pracują w stanie hamowania jako generatory i pozwalają wykorzystać tą energię do silnikowego napędzania innych jednostek. Jako wynik, można znacznie zredukować zainstalowaną moc całkowitą. Występują duże odległości między pompą, silnikiem i akumulatorem, gdyż ściśliwość cieczy roboczej w przewodach nie wpływa na dynamikę napędu. Z uwagi na to, że regulacja odbywa się w silniku można otrzymać układ regulacji o dobrych właściwościach dynamicznych. Wymagana jest korzystna relacja mocy do masy, np. pojazdy, gdyż jednostki hydrauliczne mają obecnie znacznie bardziej zwartą budowę i są lżejsze od porównywalnych elektrycznych.
22 22 Systematycznie powtarzają się cykle robocze i istnieje możliwość odzysku energii, np. w autobusach miejskich, wózkach widłowych, gdzie można akumulować energię hamowania i następnie wykorzystać ją do procesów przyspieszania. W warunkach pracy przerywanej, gdzie krótkotrwale wymagana jest duża moc. Stawia się wysokie wymagania dotyczące stałości prędkości kątowej przy znacznych zmianach momentu obrotowego. Decydujące znaczenie dla praktycznego wdrożenia napędów z adaptacyjnym sterowaniem wtórnym miała możliwość stosowania urządzeń seryjnie produkowanych, np. jednostki tłoczkowo-osiowe z wychylną tarczą typu A4VSG czy wychylnym blokiem cylindrów typu A2P firmy Rexroth. Po dokonaniu niewielkich zmian w układzie sterowania możliwe są wszelkie odmiany z: ograniczeniem mocy, regulacją zależną od prędkości kątowej i momentu obrotowego, regulacją obciążenia równoczesnego i obciążenia granicznego. Także wielkość nakładów na urządzenia w układzie sterowania można nieco zredukować, jeżeli niezbędne elementy hydrauliczne będą zasilane ciśnieniem roboczym, rys W tradycyjnej regulacji hydraulicznej: * przez zmianę wydajności pompy, * z systemem dławieniowym z rozdzielaczami, * z kompensacją ciśnienia od obciążenia tzw. load sensing, podzespół wykonawczy wytwarza strumień objętości cieczy dla silnika o stałej chłonności, a wielkość nastawiana odpowiada prędkości kątowej. W silnikach sterowanych ze sprzężeniem przez ciśnienie (sterowanie wtórne) kąt wychylenia tarczy oporowej odpowiada przyspieszeniu wału. Różnice w kształcie wielkości sterujących pokazano na rys.1.11[19], gdzie porównano wielkości nastawne w różnych sposobach regulacji dla realizacji zadanego profilu obrotów. W sterowaniu wtórnym kąt wychylenia tarczy oporowej silnika prawie nie zależy od obrotów i nie jest możliwy cykl, w którym przebieg kąta wychylenia jest podobny do sygnału zadającego.
23 23 Rys Przebiegi wielkości nastawnych w różnych sposobach regulacji dla zadanego profilu obrotów
24 24 Wśród układów adaptacyjnego sterowania wtórnego można wyróżnić następujące odmiany [17,19,53]: Ze sterowaniem bezpośrednim, rys Ten rodzaj sterowania zaproponowano w 1979 roku. Zmiana objętości geometrycznej jednostki wtórnej realizowana jest przez siłownik 4, zasilany bezpośrednio z pompy 1 o stałej wydajności. Zastosowany tachometr w postaci silnika hydraulicznego 6 o stałej chłonności pobiera z układu sterowania natężenie przepływu Q TG. Regulatorem przepływu 2 ustawia się taką wartość natężenia by różnica strumienia objętości przepływająca przez regulator oraz wytworzona przez pompę 1 była proporcjonalna do zadanej prędkości kątowej 2zad. Strumień przepływający przez zawór dławiący 3 wynosi: Q Dr = Q Stp - Q Srv -Q Sv - Q TG 1.10 gdzie: Q Dr - strumień przepływający przez zawór dławiący, Q Stp - strumień przepływający przez pompę sterującą, Q Srv - strumień przepływający przez regulator przepływu, Q Sv - strumień powodujący przesuw w siłowniku, Q TG - strumień przepływający przez tachometr, i wytwarza ciśnienie sterujące p st, które działa bezpośrednio na siłownik 4. Różnica ciśnień: p. = p st - p st jest sygnałem do zmiany objętości geometrycznej jednostki wtórnej 7, a tym samym momentu obrotowego M 2. Rys Układ sterowania jednostką wtórną z hydraulicznym przetwarzaniem sygnału sterowanym bezpośrednio
25 25 Układ z hydraulicznym przetwarzaniem sygnału sprawia jednak wiele problemów podczas pracy w stanach nieustalonych co spowodowało, że 2 lata później wprowadzono modyfikację mającą na celu poprawę funkcji przejścia układu sterowania przez zastosowanie tzw. rozdzielacza hydraulicznego sterowanego wstępnie. 2. Ze sprzężeniem drogi, rys Zmiana objętości geometrycznej jednostki wtórnej odbywa się za pomocą rozdzielacza sterowanego wstępnie, przy czym ruch siłownika kontrolowany jest przez bezpośrednie sprzężenie drogi. Rozwiązanie to nie wystarcza do osiągnięcia regulacji prędkości obrotowej bez przeregulowań, gdyż na skutek równych dróg tłoczka rozdzielacza 9 sterowanego wstępnie oraz siłownika 4, potrzebne jest duże zapotrzebowanie na natężenie przepływu, które z kolei niekorzystnie wpływa w stanach nieustalonych na zwrot sygnału hydraulicznego: Q Dr = Q Stp - Q Srv - Q sn - Q TG 1.12 gdzie: Q sr - strumień powodujący przesuw tłoczka rozdzielacza sterowanego wstępnie, pozostałe oznaczenia jak poprzednio. Rys Układ sterowania jednostką wtórną z hydraulicznym przetwarzaniem sygnału z rozdzielaczem hydraulicznym sterowanym wstępnie ze sprzężeniem drogi 3. Ze sprzężeniem siły, rys W tej modyfikacji wprowadzono sprzężenie ruchu siłownika 4 i tłoczka rozdzielacza 9 sterowanego wstępnie, przez sprężynę na podstawie bilansu sił na rozdzielaczu hydraulicznym. W rozwiązaniu tym osiąga się zadaną prędkość obrotową jednostki wtórnej bez przeregulowań, a przy
26 26 zwiększeniu przekroju 9 dławienią wstępnego również szybsze działanie układu. Mimo powyższego ten rodzaj sterowania posiada istotne wady, a mianowicie: * Duże zużycie mocy przez pompę sterującą 1 oraz duży udział mocy do wytworzenia, względnie utrzymania na poziomie stałym, ciśnienia sterującego p st0. * Podczas działania wielkości zakłócających, np. momentu obciążenia M L, pojawia się odchyłka regulacji odpowiadająca wzmocnieniu układu (quasi regulator P). Quasi regulator P podczas działania wielkości zakłócających pracuje ze stałą odchyłką regulacji pomiędzy prędkością zadaną i rzeczywistą uzyskiwaną z tachometru 6, gdyż sygnał ciśnienia p. na podstawie różnicy przepływu wynikającej z różnicy prędkości obrotowej nie wystarcza do zniwelowania zakłócenia. Koncepcja ta wpływa stabilizująco na dynamikę układu, jednak w stanach ustalonych przy obciążeniu M L powoduje większą odchyłkę regulacji niż w przypadku układu z czysto hydraulicznym przetwarzaniem sygnału. Rys Układ sterowania jednostką wtórną z hydraulicznym przetwarzaniem sygnału z rozdzielaczem hydraulicznym sterowanym wstępnie ze sprzężeniem siły 4. Ze sprzężeniem siły i elektro-hydraulicznym przetwarzaniem sygnału, rys Dzięki wprowadzeniu podrzędnego elektrycznego układu regulacji, można wyeliminować drugą wadę układu regulacji sterowania jednostką wtórną z hydraulicznym przetwarzaniem sygnału i rozdzielaczem sterowanym wstępnie ze sprzężeniem siły. Jest to możliwe przez zastosowanie tachometru elektrycznego 10 oraz elektrycznego regulatora 11 z częścią całkową. Problem, który nadal pozostaje to duże zużycie mocy w układzie.
27 27 Rys Układ sterowania jednostką wtórną z elektro-hydraulicznym przetwarzaniem sygnału 5. Ze sprzężeniem siły i elektrycznym przetwarzaniem sygnału, rys W połowie 1983 roku zaproponowano układ sterowania jednostką wtórną z elektrycznym przetwarzaniem sygnału. Prędkość kątowa U rz jednostki wtórnej 7 rejestrowana przez tachometr 6 (cyfrowy lub analogowy) jest porównywana z prędkością zadaną U zad. Na podstawie różnicy prędkości regulator 13 (PID) generuje sygnał U zad wymaganego kąta wychylenia tarczy oporowej jednostki wtórnej. Porównując go z sygnałem rzeczywistym U rz z czujnika wychylenia tarczy, po przejściu przez regulator kąta 11 otrzymuje się sygnał nastawczy U reg, który przez wzmacniacz sygnału 12 i siłownik 4 zmienia objętość geometryczną a tym samym moment obrotowy jednostki wtórnej. Objętość geometryczna jest tak długo zmieniana aż uzyska się odpowiedni moment obrotowy, by przy istniejącym quasi stałym ciśnieniu roboczym otrzymać zadaną prędkość kątową. Taki system sterowania pozwolił wyeliminować pierwszą wadę układu z hydraulicznym przetwarzaniem sygnału i sprzężeniem siłowym, a ponadto zastosowanie regulatora z częścią całkową wyeliminowało odchyłkę regulacji pojawiającą się w stanach ustalonych i działaniu wielkości zakłócającej M L.
28 28 Rys Układ sterowania z elektrycznym przetwarzaniem sygnału Wszystkie ulepszenia układu sterowania wtórnego, od układu z hydraulicznym przetwarzaniem sygnału do układu elektrycznego z regulatorem PID, z wyszczególnieniem problemów związanych z kolejnymi etapami modyfikacji, przyczyniły się do konkurencyjności stosowania tego rodzaju napędu ze względu na posiadane własności, a w szczególności: uzyskiwanych przyspieszeń, dokładności regulacji prędkości bądź momentu obrotowego, pozycjonowania oraz możliwości rekuperacji energii [17,19,53]. Jako rozwiązanie przyszłościowe można zaproponować regulator adaptacyjny, który sam będzie: wykrywał aktualne stany pracy układu hydraulicznego i stosownie do nich dokonywał optymalizacji swoich parametrów. Obecnie obserwuje się ogromny postęp w budowie nowoczesnych układów sterowania maszyn i urządzeń, które realizują skomplikowane zadania. Najczęściej są to układy elektroniczno-hydrauliczne ze sterownikiem mikroprocesorowym lub komputerem. Dla umożliwienia budowy takich układów konieczne było uruchomienie nowej generacji elementów hydrauliki charakteryzujących się następującymi cechami: * precyzyjne parametry, * sterowanie elektryczno-elektroniczne poziomu sygnałów przystosowane do układów z mikroprocesorami, * małe wymiary i masa, * wysokie ciśnienie robocze, * dźwięk o minimalnym natężeniu, * absolutna szczelność.
29 Układ napędowy hydrobusu Koncepcja napędu z adaptacyjnym sterowaniem wtórnym ze sprzężeniem siły i elektrycznym przetwarzaniem sygnału wg rys.1.16, została sprawdzona w prototypie napędu hybrydowego hydrobusu, rys.1.17 [39], zrealizowanego w Instytucie Pojazdów Politechniki Łódzkiej. Prototyp wykonano w oparciu o podzespoły firmy Rexroth i zamontowano w autobusie miejskim IKARUS 266. Zastosowano tu: pompę 1, jednostkę hydrostatyczną 2, zespół akumulatorów hydropneumatycznych 17 20, zespół zaworów logicznych sterujących kierunkiem przepływu i ciśnieniem 5 16 oraz układ sterowania w dwóch odmianach: analogowy firmy Rexroth, rys.1.23, i mikroprocesorowy, rys W rozwiązaniu tym pompa 1 i akumulatory wysokiego ciśnienia utrzymują ciśnienie robocze w określonym zakresie, tj [MPa], tworząc system z czynnym ciśnieniem. Sterując jednostką hydrostatyczną 2 według koncepcji adaptacyjnego sterowania wtórnego uzyskuje się dostosowanie momentu wyjściowego do warunków obciążenia, przy czym pracując nią jak silnikiem pobiera się z układu hydraulicznego (systemu z czynnym ciśnieniem) strumień o natężeniu przepływu Q wynikający z objętości jednostkowej i prędkości kątowej, a pracując jako pompa (w procesie hamowania) taki strumień się wytwarza i przekazuje do akumulatorów. W bloku sterującym napędu hybrydowego przewidziano sześć zaworów logicznych tzw. Cartridge [24,64,65], w tym dwa sterujące ciśnieniem i cztery sterujące kierunkiem przepływu. Są to, rys.1.17: Zawory ciśnieniowe: a) Zawór 5,6 ograniczający maksymalne ciśnienie w przewodzie wysokiego ciśnienia. b) Zawór dwustopniowy 7,8 ograniczający maksymalne ciśnienie w przewodzie niskiego ciśnienia. 2. Zawory sterujące kierunkiem przepływu: a) Zawór zwrotny 11,12 w przewodzie tłocznym pompy hydrostatycznej. W stanie beznapięciowym zawór ten pełni funkcję zaworu zwrotnego, występującą przy napędzie tylko z akumulatora. Po załączeniu prądu sterującego możliwe jest użycie pompy hydrostatycznej i silnika spalinowego jako hamulca - hamowanie silnikiem. W obydwu stanach pracy energia od silnika spalinowego dostarczana jest do układu hydrostatycznego. b) Zawór przełączający 13,14 w torze akumulatora wysokociśnieniowego pełni funkcję zaworu odcinającego i zwrotnego. W stanie beznapięciowym przepływ energii do akumulatora z części wysokociśnieniowej układu nie jest możliwy. Po załączeniu prądu sterującego przepływ jest swobodny w obie strony. Pobór energii z akumulatora jest więc możliwy zawsze, natomiast ładowanie akumulatora tylko
30 30
31 31 po załączeniu zaworu. Taki sposób działania zabezpiecza dodatkowo akumulatory przed przekroczeniem dopuszczalnego ciśnienia oraz pozwala na ich rozładowanie przed parkowaniem pojazdu, po wcześniejszym wyłączeniu silnika spalinowego i jazdę tylko z energii zgromadzonej w akumulatorze. c) Zawór zwrotny 15,16 w torze akumulatora niskociśnieniowego, o kierunku przepływu w stanie beznapięciowym z części niskociśnieniowej do akumulatora. W tym okresie układ hydrostatyczny w części niskociśnieniowej pracuje poniżej roboczego zakresu ciśnień akumulatora, [MPa], gdyż czynny jest zawór 7,8 ograniczający ciśnienie do 1.5[MPa]. Przejście na ciśnienie robocze 3[MPa] zachodzi wraz z załączeniem prądu sterującego i swobodnym przepływem w obie strony. d) Zawór zwrotny 9,10 w przewodzie wysokociśnieniowym, o kierunku przepływu w stanie beznapięciowym od silnika hydrostatycznego do akumulatora. Załączenie prądu pozwala na swobodny przepływ w obie strony i tym samym na realizację napędu. Układ połączeń zaworów logicznych w bloku sterującym pozwala na następujące stany pracy układu napędowego: postój lub parkowanie pojazdu, ładowanie akumulatorów na postoju, napęd tylko od silnika, napęd hybrydowy tj. od silnika i akumulatora. Wymienione rodzaje pracy są wybierane przez kierowcę za pomocą przełączników dwupołożeniowych. Dla realizacji jazdy do tyłu służy przełącznik zmieniający biegunowość silnika momentowego w serwozaworze na silniku hydrostatycznym 2. Utrzymanie ciśnienia roboczego w założonym zakresie przez pompę A4VSG71 i regulator HSK sprowadza się do regulacji ciśnienia oraz mocy. Układ wyposażono w : indukcyjny czujnik przesunięć IW9, kontrolujący kąt wychylenia tarczy oporowej w pompie, czujnik ciśnienia HM4, serwozawór 4WS2 z siłownikiem dwustronnego działania, jako podzespół wykonawczy wychylający tarczę oporową, elektrohydrauliczny zawór szybkiego wyłączania Z4WE6 odcinający siłownik od układu sterującego w przypadkach ekstremalnych, regulator wydajności z jednoczesną regulacją ciśnienia i ograniczeniem mocy, HSK. Regulator oddziałuje przez serwozawór na objętość jednostkową pompy, a ogranicznik mocy działa bezpośrednio na wyjście regulatora ciśnienia, głównie na jego część PI, rys.1.18 [39]. Wartość rzeczywista przekazywanej mocy zostaje wyznaczona z kąta wychylenia tarczy oporowej oraz ciśnienia. W powyższym rozwiązaniu zmiany wydajności można dokonać przez zmianę: prędkości kątowej oraz objętości jednostkowej pompy. Stąd zaprojektowany regulator mikroprocesorowy, rys.1.18, realizuje następujące zadania: * sterowanie prędkością kątową silnika spalinowego (regulator obrotów), * utrzymywanie stałej wartości ciśnienia zasilającego (regulator ciśnienia).
32 32
33 33 Urządzeniem wykonawczym dla regulatora prędkości kątowej jest elektrohydrauliczny siłownik połączony z listwą pompy wtryskowej. Zmiana napięcia sterującego powoduje przesunięcie tłoka siłownika, a tym samym listwy pompy wtryskowej i w konsekwencji zmianę chwilowej dawki paliwa oraz obrotów silnika. Sygnał obroty zadane jest wartością zadawaną przez program, w zależności od wartości ciśnienia roboczego i tak: ciśnieniu maksymalnemu odpowiadają obroty biegu jałowego silnika spalinowego, ładowaniu akumulatorów odpowiadają obroty maksymalnej sprawności silnika spalinowego. Uchyb ciśnienia obliczany w węźle sumacyjnym, podany do regulatora PI, podlega ograniczeniu w bloku limitera, gdzie jego wartość może zmieniać się w granicach 0 100%. Sygnał wypracowany w torze PI jest podawany również przez przełącznik na siłownik połączony z pompą wtryskową, w przypadku gdy sygnał nastawczy regulatora ciśnienia jest większy np. od 20%. W przeciwnym przypadku na siłownik jest podawana wartość zerowa. Takie rozwiązanie ułatwia sprowadzenie silnika do obrotów biegu jałowego, gdy regulator ciśnienia nie ładuje akumulatorów energii. Urządzeniem wykonawczym dla regulatora ciśnienia jest serwozawór. Zwiększenie prądu sterującego powoduje wychylenie, podukładem: serwozawór-siłownik tarczy oporowej w pompie, przez co wzrasta wydajność jednostkowa i w końcowym etapie, ciśnienie w akumulatorach hydraulicznych. Regulator ciśnienia zbudowany jest z dwóch kaskadowo połączonych regulatorów: PI oraz P. Regulator PI jest nadrzędnym regulatorem ciśnienia, natomiast regulator P jako podrzędny reguluje położenie serwozaworu. Taki sposób regulacji zapewnia dokładniejszą kontrolę położenia serwo. Jednostka hydrostatyczna A4VSG250 z regulatorem DS1, rys.1.17, pełni podstawowe zadanie napędu hybrydowego tj. regulację prędkości pojazdu połączoną z odzyskiem energii hamowania. Układ wyposażony jest w: * serwozawór 4WS2 z siłownikiem dwustronnego działania jako podzespół wykonawczy wychylający tarczę oporową, * zawór szybkiego wyłączania Z4WE6 odcinający siłownik od układu, * indukcyjny czujnik przesunięć IW9 kontrolujący kąt wychylenia tarczy oporowej, * prądniczkę tachometryczną TDP 0.7/8-3 z wyłącznikiem odśrodkowym załączającym m.in. zawór Z4WE6, * jednokierunkowy zawór odcinający S15A1 zabezpieczający układ hydrauliczny przed kawitacją, * regulator prędkości kątowej wału jednostki A4VSG250, rys.1.19: w wersji analogowej VT239A firmy Rexroth, rys.1.23, oraz w wersji mikroprocesorowej, rys Cechami charakterystycznymi regulatora prędkości pojazdu są: - regulator PID prędkości kątowej, - regulator PD kąta wychylenia tarczy oporowej, - uruchamianie serwozaworu na fali 200[kHz].
34 34 Rys Schemat regulatora prędkości pojazdu W regulatorze tym przewidziano układ logiczny pozwalający opracować sygnał zadany dla układu zasadniczego, zależnie od sygnałów zadawanych przez kierowcę pedałami: gazu i hamulca. Układ logiczny przestrzegając hierarchii ważności sygnałów, nie pozwala na jednoczesne podanie sygnałów hamulca i gazu. Na wyjściu sumatora pojawia się wartość zadana prędkości jazdy w przypadku, gdy nie jest wciśnięty pedał hamulca lub prędkość hamowania, gdy jest on wciśnięty. Sygnał z sumatora jest wartością zadaną dla dwóch kaskadowo połączonych regulatorów: PID i PD. Pierwszy z nich na podstawie zadanej i rzeczywistej prędkości wypracowuje sygnał zadanego położenia tarczy oporowej, natomiast drugi wypracowuje sygnał sterujący serwozaworem. Rys Obwód regulacji kąta wychylenia tarczy oporowej
35 35 Zespół serwozawór+siłownik wychylający tarczę oporową w jednostce hydrostatycznej posiada charakterystykę całkowo-inercyjną, rys.1.20, a jak wiadomo z teorii sterowania całkowalne właściwości mają ujemny wpływ na stabilność obwodu regulacji obrotów i położenia. Przez sprzężenie zwrotne rzeczywistej wartości kąta wychylenia i utworzenie zamkniętego obwodu regulacji kąta wychylenia, własności całkujące zespołu można przekształcić w proporcjonalno-inercyjne i tym samym otrzymać poprawne zachowanie się regulatora. Prędkość kątowa wału silnika hydrostatycznego wynika z kąta wychylenia tarczy oporowej w zależności proporcjonalno-inercyjnej, rys.1.21, co powoduje, że przebieg obrotów po skokowej zmianie kąta wychylenia od zera do maksimum, przy momencie obciążenia M L =0, przedstawia się jak na rys.1.22 [19]. Rys Model obciążeń na wale silnika Rys Przebieg rozpędzania wału silnika Silnik hydrostatyczny rozpędza się wg zależności w przybliżeniu całkującej ze względu na to, że tarcie bloku tłoczków roboczych stanowi tylko kilka procent maksymalnego momentu obrotowego. W stanach równowagi już więc względnie małe zmiany momentu obciążenia spowodują przyspieszanie bądź opóźnianie, które przy stałym kącie wychylenia zachodzi dopiero przy dużej różnicy obrotów. Dla utrzymania stałych obrotów kąt wychylenia musi być więc ciągle korygowany. Stąd konieczne jest dla regulacji położenia sprzężenie obrotów, które może zostać zrealizowane przez: nadrzędny obwód regulacji obrotów w regulatorze analogowym, rys.1.23, albo specjalny algorytm w regulatorze cyfrowym, rys Ten sposób regulacji zapewnia dokładniejszą kontrolę położenia serwozaworu a przez to prędkości pojazdu. Zastosowanie sterowania cyfrowego ze specjalnie opracowanym programem upraszcza elektryczne obwody regulatorów, bowiem mikroprocesor wylicza wartości zadane dla członów wykonawczych układu sterowania. Technologia ta umożliwia ponadto swobodne konfigurowanie obwodów regulacji oraz pozwala na zastosowanie uniwersalnych sterowników handlowych. W prototypie hydrobusu regulator cyfrowy zrealizowano w oparciu o sterownik firmy PEP Modular Computers, wyposażony w procesor Motorola 68302FC20, a do napisania programu użyto pakietu ISaGraf v.3.21.
36 36 Rys Schemat blokowy układu regulacji prędkości kątowej w technice analogowej Rys Schemat blokowy układu regulacji prędkości kątowej w technice cyfrowej Mechaniczna część napędu hydrostatycznego ze sterowaniem przez zmianę objętości jednostkowej jest uzupełniona elektrycznie załączanym zaworem zwrotnym, który w sytuacjach awaryjnych przerywa doprowadzenie cieczy (energii) do jednostki hydrostatycznej. W przeciwieństwie do konwencjonalnego napędu hydrostatycznego, w którym zawór bezpieczeństwa ogranicza wartość ciśnienia bądź zawór dławiący zarządza strumieniem oleju, silnik przy sterowaniu wtórnym jest bezpośrednio podłączony do źródła energii. Możliwość przyjęcia energii jest więc praktycznie nieograniczona. W przypadku zakłóceń, np. przerwa w układzie regulacji, napęd musi zostać odłączony od dopływu energii. Przy wyłączonym zaworze zwrotnym jednostka może pracować tylko generatorowo, tj. jako pompa względem sieci, umożliwiając zahamowanie pojazdu. W stanie załączonym, zawór zwrotny pozwala na swobodny przepływ energii w obydwu kierunkach: z i do sieci.
37 37 2. DOBÓR SERWOMECHANIZMÓW DO OBWODÓW REGULACJI Na rys.2.1[42] przedstawiono funkcjonalny schemat blokowy układu regulacji z serwozaworem, w którym występują trzy podzespoły elektroniczne: * wzmacniacz, * czujnik sygnału wyjściowego (wielkości regulowanej), * zadajnik sygnału wejściowego. Obwody regulacji kątów wychylenia tarcz oporowych jednostek hydrostatycznych w układzie napędowym hydrobusu są przykładami realizacji takich układów, a poprawna praca tych jednostek i tym samym hydrobusu, zależy od prawidłowego doboru parametrów w odpowiadających im układach regulacji. Mimo praktycznego, szczególnego zastosowania jakim jest hydrobus, wnioski i uwagi zamieszczone w tym rozdziale mają charakter ogólny. Rys.2.1. Blokowy schemat funkcjonalny układu regulacji z serwozaworem
38 38 Wzmacniacz spełnia w powyższym układzie regulacji następujące funkcje: * węzła sumacyjnego, w którym porównuje się sygnał sterujący z sygnałem sprzężenia zwrotnego, * regulatora korygującego własności dynamiczne i statyczne układu, * przetwornika napięciowo-prądowego przetwarzającego napięciowy sygnał wyjściowy z regulatora w prąd płynący w cewkach, * wzmacniacza mocy, * generatora sygnału okresowo zmiennego sinusoidalnego lub prostokątnego, o częstotliwości [Hz] i małej amplitudzie, który jest nakładany na sygnał sterujący prądu stałego, w celu zmniejszenia histerezy wywołanej magnesowaniem rdzenia twornika w serwozaworze i tarciem suchym suwaka drugiego stopnia serwozaworu, uzyskując poprawę stabilności i zwiększenie czułości progowej zaworu. Przykładowo, we wzmacniaczach SR7S1X przystosowanych do współpracy z serwozaworami 4WS2EM10 generator wytwarza sygnał o częstotliwości 340[Hz] i amplitudzie 3[mA], przy maksymalnej wartości prądu sterującego 60[mA]. Projektowanie układów regulacji z zastosowaniem serwozaworów produkowanych przez znane w świecie firmy, jak: Rexroth, Bosch, Moog, Vickers, nie wymaga opracowania i wykonania wzmacniaczy, gdyż są wytwarzane przez te firmy na płytach drukowanych o znormalizowanych wymiarach Eurokarty i przystosowane do montażu panelowego. Przykładowo budowę wzmacniacza SR7S1X zastosowanego w hydrobusie przedstawia schemat blokowy na rys.2.2[45]. Do zasilania 1 wymagany jest prąd stały o napięciu 20 28[V], które w module wzmacniacza 2 zostaje zamienione w stabilizowane 15[V], dla zasilania odbiorników zewnętrznych i wewnętrznych. We wzmacniaczu SR7S1X istnieją dwa zespoły funkcjonalne: 1. Zespół sterowania serwozaworem ze stopniem końcowym 4 i regulatorem PD. W zależności od położenia siłownika przetwornik indukcyjny 6 wytwarza sygnał napięciowy prądu przemiennego o różnej amplitudzie. Sygnał ten jest przekształcany przez demodulator 5 w odpowiedni sygnał napięciowy prądu stałego. Regulator położenia 3 porównuje wartość zadaną na styku 28a z wartością rzeczywistą na zacisku 32a lub w gnieździe pomiarowym 2. Regulator 3 przekazuje sygnał do stopnia końcowego 4, gdzie przekształca się sygnał napięciowy w proporcjonalny sygnał prądowy sterujący zaworem. Przez zwarcie styku 7 i przekaźnika K2 może wystąpić rozłączenie sygnału wyjściowego stopnia końcowego 4, np. w zależności od wartości ciśnienia w układzie hydraulicznym. Zapobiega to ewentualnemu uszkodzeniu zespołu dysza-przysłona w serwozaworze, które może wystąpić przy wysterowaniu serwozaworu i nie podaniu ciśnienia do układu. Z uwagi na to, odblokowanie serwozaworu zabezpiecza wyłącznik ciśnieniowy w układzie hydraulicznym, połączony z wzmacniaczem przez wejście 6a. Do wyjściowego sygnału prądowego przez modulator 8 zostaje dołączony sygnał prądu przemiennego, uzyskując tym sposobem zmniejszenie histerezy,
39 39 poprawę stabilności i zwiększenie czułości progowej zaworu. Wartość prądu sterowania wskazuje miernik 9 umieszczony na płycie czołowej. 2. Regulator PID dla kaskadowego układu regulacji porównujący wartość zadaną na styku 30c z wartością rzeczywistą na styku 28c. W zależności od odchyłki regulator wytwarza sygnał napięciowy na styku 32c, doprowadzony przez styk 28a do zespołu sterowania. Do odblokowania regulatora 10 służy przekaźnik K1, wywoływany na zacisku 2a. Sygnał wyjściowy mierzony jest przy pomocy przetwornika (czujnika), rys.2.1, który przetwarza wielkość mechaniczną na sygnał elektryczny. W dziedzinie pomiarów wielkości mechanicznych metodami elektrycznymi istnieje wiele specjalistycznych firm, z ofertą produktów od tensometrów, przez przetworniki, po analogowe i cyfrowe wzmacniacze pomiarowe. Po połączeniu tych wzmacniaczy z komputerem i odpowiednim oprogramowaniu, uzyskuje się możliwość wizualizacji i kontroli pomiaru z określoną dokładnością i niezawodnością. Pomiar rzeczywistej wielkości regulowanej ma istotne znaczenie w układzie regulacji, gdyż dokładność układu nie może być większa od dokładności pomiaru. Przetwornik powinien być więc w miarę możliwości o co najmniej jeden rząd wielkości dokładniejszy od żądanej dokładności układu. Podstawowe niedokładności w przetwornikach to: * Powtarzalność (histereza). Błędy tego typu są spowodowane przez luz w układzie mechanicznym jak też konstrukcję samego przetwornika. * Skokowość. Sygnały wyjściowe niektórych przetworników nie są doskonale gładkie. Klasycznym przykładem są potencjometry z uzwojeniem drutowym. * Liniowość. Konieczne jest by sygnał wyjściowy z czujnika był liniową funkcją wielkości mechanicznej. Jest to istotne gdy sygnał zadany i sprzężenia zwrotnego są generowane przez potencjometry, których wyjścia muszą być do siebie dopasowane. Liniowości rzędu 0.5% pełnej skali są powszechne, ale możliwe są 0.1% lub wyższe. Niekiedy nieliniowość może być spowodowana sposobem mocowania przetwornika. * Innym źródłem niedokładności przetwornika jest tętnienie. Jest to charakterystyczne dla przetworników wzbudzanych prądem zmiennym o wysokim napięciu, a spowodowane przez niedoskonałe filtrowanie sygnału nośnego. Jeśli częstotliwość nośną dobierze się poprawnie, odpowiedź serwomechanizmu na tętnienie można zminimalizować. Zadajniki sygnału wejściowego, rys.2.1, są rozwiązywane w dwojaki sposób: jako zadajniki z dyskretnym nastawianiem kilku dowolnych wartości w przedziale 0 10[V], które mogą być zadawane w dowolnej kolejności lub jako zadajniki z nastawianiem ciągłym. W przypadku hydrobusu zarówno zadajniki sygnału wejściowego jak i przetworniki wielkości regulowanych zakupiono w firmie Rexroth, w ramach kompletnej oferty handlowej układu hydraulicznego.
40 40 Rys.2.2. Schemat blokowy serwowzmacniacza SR7S1X firmy Rexroth
41 41 Zakłócenia zewnętrzne powodują ruch siłownika bez zmiany sygnału zadanego, rys.2.1. Dla wyrównania sygnału zakłóceń potrzebny jest sygnał wyjściowy na siłowniku w kierunku przeciwnym. Wielkość potrzebnego sygnału uchybu zmniejsza się ze wzrostem wzmocnienia wzmacniacza. Ideałem byłoby, gdyby wzmocnienie ustawione było tak, by działanie serwomechanizmu zależało jedynie od dokładności samego przetwornika sygnału wyjściowego. W praktyce wzmocnienie ograniczone jest warunkami stabilności. W niektórych zastosowaniach stabilność może być czynnikiem nie pozwalającym na osiągnięcie pożądanego działania, nawet w przypadku układu zamkniętego. Serwozawór, elektrycznie sterowany wzmacniacz hydrauliczny, stosowany jest w układach regulacji, gdzie występuje przetworzenie elektrycznego sygnału wejściowego w odpowiednie natężenie przepływu oleju oraz określenie sygnału uchybu, rys.2.1, który następnie zostaje doprowadzony do serwozaworu w celu dokonania korekcji. Sygnał sterujący o małej mocy, np. 0.08[W], może sterować mocami sięgającymi wielu setek [kw]. Serwozawory mają szerokie pasmo przenoszenia sygnałów i odznaczają się dużą szybkością odpowiedzi czasowych, w związku z czym znajdują zastosowanie głównie w szybkozmiennych układach regulacji. Większość znanych w świecie producentów stosuje w serwozaworach silniki momentowe wyróżniające się najwyższą dynamiką oraz najmniejszą mocą sygnału niezbędną do sterowania. Dla napięciowego sygnału wejściowego 10[V] natężenie prądu w cewkach silnika momentowego nie przekracza 100[mA], a moc sygnału elektrycznego [W]. Najczęściej rezystancje cewek są tak dobrane, że prądy płynące w ich obwodach nie przekraczają wartości 50[mA]. Rys.2.3. Serwozawór z mechanicznym sprzężeniem zwrotnym, typ 4WS2EM10: 1-momentowy silnik sterujący, 2-korpus wzmacniacza, 3-dysze regulowane, 4-dysze stałe, 5-sprężyna powrotna, 6-suwak z tuleją sterowniczą, 7-przysłona, 8-rurka sprężysta, 9-twornik
42 42 Dwustopniowe serwozawory 4WS2EM10 firmy Rexroth, rys.2.3[45], zastosowane w hydrobusie składają się z: pierwszego stopnia: z silnikiem sterującym 1 wzbudzanym magnesem trwałym i z wzmacniaczem hydraulicznym 2 wykonanym w postaci układu dysze 3 - przysłona 7, mechanicznego sprzężenia zwrotnego 5 jako elementu łączącego pierwszy stopień z drugim; zastosowany rodzaj sprzężenia działa na podstawie równowagi momentów silnika sterującego 1 i sprężyny powrotnej 5, drugiego stopnia z wymienną tuleją sterowniczą i suwakiem 6. Każdy serwozawór może być sterowany napięciowo lub prądowo. W przypadku sterowania napięciowego zależność między wejściowym sygnałem napięciowym przyłożonym do cewek silnika momentowego a prądem, napisana na podstawie drugiego prawa Kirchoffa, jest następująca [42]: L di dt R R i u p p w 2.1 gdzie: L p - indukcyjność cewek [H], R p - rezystancja cewek [ ], R w - rezystancja stopnia wyjściowego wzmacniacza [ ], i - natężenie prądu [ma], u - napięcie [V]. Stosując przekształcenie Laplace a dla powyższego związku otrzymuje się funkcję przejścia w postaci: i( s) K 2.2 u( s) Ts 1 gdzie: Lp T s, R R p 1 A K R R V p w w. Tak więc w przypadku sterowania napięciowego zależność między prądem a napięciem nie jest proporcjonalna z dwóch powodów: 1. Indukcyjność cewek L p wywołuje wolniejsze zmiany prądu niż wartość napięcia, reprezentowane przez stałą czasową T. 2. Prąd zależy od rezystancji cewek, która zmienia się w funkcji temperatury.
43 43 Powyższe wnioski oraz praktycznie liniowa zależność między momentem obrotowym a prądem płynącym w cewkach, wskazują na sterowanie prądowe jako wariant korzystniejszy. Należy również zauważyć, że sposób połączenia cewek silnika momentowego: szeregowo, równolegle lub przeciwsobnie, rys.2.4[42], wpływa na wartości prądu płynącego przez cewki i rozwiązanie stopnia wyjściowego wzmacniacza. Połączenie to realizowane jest na zewnątrz serwozaworu. Rys.2.4. Sposoby podłączenia cewek silnika momentowego serwozaworu: a) szeregowo, b) równolegle, c) przeciwsobne (różnicowe) Serwozawór dławiąc strumień oleju doprowadzany do siłownika wymusza jego ruch. Zakładając idealne warunki przepływu przez miejsce dławienia można określić natężenie z równania: Q Y K p 2.3 gdzie: Q - natężenie przepływu oleju [m 3 /s], jak na rys.2.3 [31], Y - stopień wysterowania [%], K - stała uwzględniająca geometrię szczeliny sterującej [m 3 /s/mpa 0.5 ], p - spadek ciśnienia na krawędzi sterującej [MPa] Zależnie od obciążenia ruch siłownika wymaga ciśnienia p L. Jeśli p o jest ciśnieniem dostarczanym do układu, to spadek ciśnienia na krawędzi sterującej wynosi: p p p o L 2.4
44 44 Gdy siłownik jest nie obciążony, czyli p L 0, wówczas można dysponować ciśnieniem p o jako p. Jeżeli siłownik jest zablokowany, to całe ciśnienie układu będzie występować przy siłowniku a przepływ oleju będzie bliski zeru. Rys.2.5. Charakterystyka statyczna serwozaworu Rys.2.5 przedstawia charakterystykę statyczną typowego zaworu. Dla warunków bez obciążenia przepływ z serwozaworu jest liniowo proporcjonalny do rozmiaru otworów dławiących, które są proporcjonalne do prądu sygnału wejściowego. Wzrost obciążenia przeciwstawiając się ruchowi tłoka zmniejsza przepływ odpowiadający danej wartości prądu wejściowego, a opadanie krzywych nie jest duże do chwili, gdy obciążenie osiągnie wartość p o. Pochylenie K pq krzywych określa pracę blisko zera, co jest zasadniczo zdeterminowane zerowym upływem suwaka czterokrawędziowego. Upływ siłownika dodaje się do K pq. Mały spadek powoduje wysokie wzmocnienie ciśnienia, K p. W rzeczywistości liniowe rozszerzenie K p osiąga p o dla prądu wejściowego w granicach 2 5% prądu znamionowego, co oznacza, że K pq = (Q/p o ). Charakterystyka zaworu w pobliżu zera jest istotną dla serwomechanizmu położenia, gdyż znaczący jest udział jego czasu pracy w pobliżu przepływu zerowego. Korygowanie napędu wymaga zastosowania odpowiedniej siły. Z tego względu duże znaczenie ma przebieg ciśnienia wyjściowego w funkcji sygnału wejściowego dla serwozaworu przy zamkniętych przyłączach odbiornika, rys.2.5. Stosunek ciśnienia wyjściowego do sygnału wejściowego nazywany jest wzmocnieniem K p ciśnienia: pl MPa K p 2.5 i ma Na podstawie charakterystyki ciśnienia, rys.2.5, można stwierdzić na ile serwozawór musi otworzyć przepływ aby uzyskać niezbędne ciśnienie dla korekcji. Otworzenie zaworu wymuszane jest przez układ regulacji. Stąd istnieje ścisły związek między wzmocnieniem ciśnienia i dokładnością regulacji. Z typowych charakterystyk wynika,
45 45 Rys.2.6. Charakterystyki dynamiczne serwozaworu 4WS2EM10
46 46 że przy 1 2% prądu znamionowego można dla korekcji odchyłki regulacji dysponować już ciśnieniem, stanowiącym ok. 80% wartości maksymalnej. Należy jednocześnie zauważyć, że podjęcie korekcji przez serwozawór wymaga sygnału wejściowego, który odpowiednio do kierunku korekcji musi być większy od czułości progowej lub czułości przy zmianie znaku sygnału. Czułości te, podawane najczęściej w % prądu znamionowego, są strefami martwymi, wywierającymi wpływ na dokładność układu regulacji. Miarodajnym parametrem dla dokładności regulacji napędu jest jego częstotliwość własna i wynikające stąd możliwe wzmocnienie całkowite. Częstotliwość własną serwomechanizmu wyznacza właściwie dynamika serwozaworu. Najbardziej rozpowszechnionym sposobem badania własności dynamicznych jest wyznaczenie charakterystyki częstotliwościowej. Sygnał odpowiedzi serwozaworu, natężenie przepływu Q, w porównaniu z sygnałem wzbudzającym ma zmienioną amplitudę i przesunięcie fazowe. W miarę zwiększania się częstotliwości amplituda maleje i wzrasta przesunięcie fazowe. Powyższe zmiany względem sygnału wejściowego przedstawia się w postaci charakterystyki logarytmicznej, tzw. wykresu Bode, rys.2.6 [45]. Charakterystykę amplitudową podaje się najczęściej w db, przy czym: stosunek amplitudowy w db AQ 20log 2.6 A Dla czysto jakościowego opisania charakterystyki częstotliwościowej zdefiniowano parametry częstotliwości przy 3dB i przy Jako f 3 db określa się tę częstotliwość, przy której sygnał wyjściowy Q zmniejszył się o 3dB co odpowiada A Q / A , czyli zmniejszenie amplitudy wielkości wyjściowej wynosi 30%. i Częstotliwość f 90 0 opisuje ten punkt charakterystyki fazowej, w którym sygnał wyjściowy jest opóźniony fazowo o 90 0 w stosunku do sygnału wejściowego. Dla serwozaworu 4WS2EM10 częstotliwości przy 3dB i przy 90 0 zależą od: ciśnienia zasilania, sygnału wzbudzenia oraz natężenia przepływu i znajdują się w zakresie < > [Hz], rys.2.6. Zmienne są również parametry odpowiedzi na skok jednostkowy. Z zastosowaniem serwozaworu wiążą się własności dynamiczne oraz dwa parametry hydrauliczne: wzmocnienie natężenia przepływu i przekrycie suwaka, wpływające na wzmocnienie ciśnienia. Zależność między natężeniem przepływu i elektrycznym sygnałem wejściowym przedstawia charakterystyka natężenia przepływu, rys.2.7[33,42,58]. W układach regulacji położenia i ciśnienia zawór działa w punkcie roboczym A, tj. koło punktu zerowego. Dla takiego zastosowania należy wybrać przekrycie zerowe lub ujemne suwaka. W układzie regulacji prędkości zawór działa w punkcie roboczym B. Można stosować tu suwak z przekryciem dodatnim, które nie zapewnia pełnego zamknięcia. Podobny efekt otrzymuje się przy przesunięciu punktu i
47 47 zerowego w wyniku wahań ciśnienia i temperatury oraz przy jednostronnym zanieczyszczeniu dysz, tj. przepływ w jednym kierunku i ruch napędu. Wzmocnienie natężenia przepływu podaje się jako stosunek między sygnałem wyjściowym i wejściowym, określony wzorem: Q m 3 / s KQ 2.7 i ma Powyższa zależność przedstawia średnie nachylenie charakterystyki natężenia przepływu, rys.2.7, które zależy od ciśnienia w układzie. Każdy zawór wymaga osobnego ustawienia regulatora, gdyż tolerancje produkcyjne suwaka i tulei sterowniczej wpływają na różne wzmocnienia natężenia przepływu, zwłaszcza wokół punktu zerowego A. Serwozawór wywiera bezpośredni wpływ na zakres regulacji natężenia przepływu i możliwą dokładność pozycjonowania przy regulacji położenia. Rys.2.5. Charakterystyka natężenia przepływu Działanie serwomechanizmów omówiono poniżej dla trzech odmian: położenia, prędkości i siły, celem zrozumienia występujących w nich współzależności.
48 Serwomechanizm położenia Podstawowym układem sterowania w obwodzie zamkniętym jest serwomechanizm położenia, rys.2.8a. Serwozawór i obciążony siłownik hydrauliczny rozpatrywane są jako szeregowo połączone człony inercyjne drugiego rzędu. Funkcja przejścia od prędkości do przemieszczenia tłoczyska siłownika ma charakter całkujący. Wyróżniającą cechą napędu siłownikowego jest pulsacja drgań własnych układu hydraulicznego (masa/sprężystość oleju). Pętla pokazana na rys.2.8b wskazuje, że nawet słaby sygnał uchybu spowoduje ruch siłownika, a sygnał sprzężenia zwrotnego będzie wzrastał dopóki prędkość nie osiągnie wartości zerowej. Odpowiedź stanu ustalonego pętli wynosi więc X=(1/K x )U 1. Odpowiedź dynamiczna pętli jest zależna od iloczynu wzmocnień wokół pętli, nazywanego wzmocnieniem prędkości pętli, K VX [s -1 ]. Po chwilowym zakłóceniu przez siłę U 1 wzmocnienie prędkości pętli byłoby bezpośrednią miarą prędkości jaką wygeneruje serwomechanizm podczas zmniejszania uchybu (V=K VX X). Rys.2.8. Schematy blokowe układu regulacji położenia: a) uproszczony, b) szczegółowy
49 49 Wzmocnienie prędkości pętli określa wyrażenie: Kx KPI KQ KVX A gdzie: K PI - wzmocnienie regulatora PI [ma/v], K Q - wzmocnienie natężenia przepływu [m 3 /s/ma], K X - wzmocnienie sygnału przetwornika położenia [V/m], A - powierzchnia przekroju poprzecznego cylindra siłownika [m 2 ]. 2.8 Stała czasowa T układu jest odwrotnie proporcjonalna do współczynnika wzmocnienia K VX. Stąd im większe wzmocnienie tym szybszy jest układ. T 1 K VX 2.9 Ze schematu blokowego wynika, że odpowiedź dynamiczna obwodu zamkniętego jest prostym opóźnieniem pierwszego rzędu ze stałą czasową T, a odpowiedź harmoniczna wykazuje 45[ o ] opóźnienia fazowego przy częstotliwości (K VX /2 )[Hz]. Należy zauważyć, że dotyczy to odpowiedzi na małe zmiany sygnału zadanego. Ze wzrostem sygnału odpowiedź ogranicza maksymalny przepływ w serwozaworze. Przeważnie już 5% wartości prądu sterującego serwozaworem wystarcza, aby w układzie regulacji położenia sprowadzić prędkość ruchu do zera lub skompensować wpływ zakłóceń, gdyż przy 5% zmianie wartości sygnału sterującego ciśnienie wyjściowe serwozaworu może osiągnąć pełną wartość ciśnienia układu. Uchyb przemieszczenia nastawczego wynosi więc: gdzie: X 005. V / K VX max 2.10 V max - prędkość ruchu tłoczyska siłownika, która ustali się przy 100% otwarciu serwozaworu [m/s]. Im większe będzie K VX tym mniejszy staje się uchyb przemieszczenia i tym sztywniejszy staje się układ wobec sił obciążających. Wynika z tego też, że należy dobierać możliwie małe nominalne natężenie przepływu przez serwozawór Q AV max. Z zasady będzie nim serwozawór o lepszych właściwościach dynamicznych
50 50 Ze względu na warunki stabilizacji nie można wybierać dowolnie dużego wzmocnienia. Jeżeli wzmocnienie układu K VX jest większe niż K V kryt,odpowiadające częstotliwości krytycznej układu, to przy zakłóceniu układ staje się niestabilny. Przy doborze wzmocnienia K VX istnieją dwie możliwości [33,50,58]: 1. Częstotliwość V serwozaworu przy przesunięciu fazowym 900 jest znacznie większa niż częstotliwość własna siłownika L. W takim przypadku można początkowo pominąć dynamikę tej części układu, która ma większą częstotliwość drgań własnych, wskutek czego model układu regulacji zostaje zredukowany do układu trzeciego rzędu, dla którego obowiązuje: KVX KV kryt 2 d L L 2.11 gdzie: d L - współczynnik tłumienia. Na rys.2.9 [58] przedstawiono przebieg jakościowy charakterystyki czasowej takiego układu regulacji trzeciego rzędu, której parametrami są wartości względne tłumienia i wzmocnienia układu. Optymalną wartość K V opt wyprowadza się zazwyczaj z charakterystyki czasowej, będącej odpowiedzią na wymuszenie skokowe. Jeżeli przy danym tłumieniu utrzymuje się małe K VX, to wynikiem jest dość monotonicznie narastająca odpowiedź skokowa. Gdy przyjmuje się bardzo duże K VX to odpowiedź będzie miała charakter oscylacyjny. Rys.2.9. Charakterystyka układu regulacji trzeciego rzędu Na podstawie przebiegu odpowiedzi na wymuszenie skokowe można określić wskaźniki jakości układu. Często stosowane jest kryterium ITAE (Integral of Time multipied with Absolute Error) [50,58]:
51 51 gdzie: ITAE t X E X A dt 0 X E - wielkość wejściowa (zadana) np. U 1, X A - wielkość wyjściowa np. x, V, p Jako optymalną określa się taką wartość wzmocnienia układu, przy której ITAE staje się najmniejsza. Określając wartość wskaźnika całkowego ITAE w funkcji zmian wzmocnienia K VX / L i współczynnika tłumienia jako parametru, otrzymuje się wykres jak na rys Dla współczynników tłumienia 02. d L 09. wartości optymalne ITAE wypadają dla 025. K VX / L Wynika stąd reguła 1: K V opt 1/ L Takie wzmocnienie, nazywane prędkościowe, jest iloczynem wzmocnienia w układzie hydraulicznym i sterowania elektronicznego. Rys Wskaźnik całkowy w funkcji wzmocnienia i współczynnika tłumienia jako parametru
52 52 2. Uwzględniając obydwie częstotliwości drgań własnych powstaje układ piątego rzędu. Z rozważań o stabilności wynika, że należy uwzględnić istnienie krytycznej częstotliwości kryt i krytycznego wzmocnienia K V kryt, zależnego od częstotliwości własnej obydwu części układu, tj. serwozaworu i L V częstotliwości własnej częstotliwości własnej siłownika. Wartość częstotliwości krytycznej kryt jest zawsze mniejsza od mniejszej spośród obydwu wartości V i L. Pomijając współczynniki tłumienia otrzymuje się regułę 2: Częstotliwość własną dwustronnym określa wzór: L kryt V V L L 2.14 układu siłownika dwustronnego działania z tłoczyskiem 2 E A 2 / ( V m) 2.15 L R s gdzie: E - moduł sprężystości oleju ( ) [kg/m*s 2 ], A R - powierzchnia pierścienia tłoka [m 2 ]; w obliczeniach uproszczonych AR A, m - masa zespołu tłoczyska [kg], V s - całkowita objętość użyteczna oleju [m 3 ], określona z wzoru: Vs AR H / 2 VLR 2.16 gdzie: H - skok siłownika [m], V LR - objętość oleju w przewodzie doprowadzającym od serwozaworu [m 3 ]. Wartość częstotliwości drgań własnych ma swoje minimum w położeniu środkowym tłoka siłownika. Optymalne wzmocnienie układu określa reguła 3: K V opt 3 Duża dokładność położenia i sztywność obciążenia układu wymagają możliwie dużego wzmocnienia w układzie sterowania elektronicznego K PI. Wzmocnienie hydrauliczne powinno być tylko na tyle duże, na ile jest to nieodzowne, a wynika z uchybu przemieszczenia nastawczego. kryt
53 53 Zwiększenie optymalnego współczynnika wzmocnienia, a tym samym poprawę dokładności nastawiania umożliwia: zastosowanie w układzie połączeń regulatora PD, prędkościowe sprzężenie zwrotne, ciśnieniowe sprzężenie zwrotne, działanie całkujące, które dowolnie zwiększa dokładność układu, jednak wymagania dotyczące dynamiki ograniczają udział członu całkującego I, powiększenie tłumienia w układzie przez obejściowy przewód dla przecieków między przyłączami odbiornika, jednak powoduje to również zmniejszenie statycznej sztywności obciążeniowej. Następnym podstawowym parametrem jest sztywność obwodu zamkniętego, tj. wartość siły zewnętrznej potrzebnej do spowodowania uchybu. Odpowiedź położenia na samą siłę zewnętrzną może być określona przy Q=0, a sztywność sygnału wyjściowego (obciążenia) wynosi wtedy: Fd X A K 2 K VX pq 2.18 Sztywność obciążenia jest więc proporcjonalna do wzmocnienia K VX układu i odwrotnie proporcjonalna do ciśnieniowego wzmocnienia natężenia przepływu K pq, który jest równy ciśnieniowemu współczynnikowi natężenia przepływu serwozaworu z dodaniem zależnych od ciśnienia przecieków w odbiorniku. Powiększenie powierzchni tłoka siłownika lub chłonności silnika hydraulicznego zwiększa sztywność obciążenia w stosunku kwadratowym do wymienionego powiększenia. Jak wspomniano dla serwozaworu K pq = (Q/p o ). Przyjmując minimalną wartość K pq wyrażenie na sztywność redukuje się do: Fd X 20K VX A po Q / A r 2.19 Zatem sztywność pętli zamkniętej jest proporcjonalna do wzmocnienia prędkości pętli i do stosunku maksymalnej siły sygnału wyjściowego i maksymalnej prędkości sygnału wyjściowego. Można zauważyć, że wyrażenia sztywności napędu pokazane na rys.2.8a nie pojawiają się bezpośrednio w wyrażeniach na sztywność obwodu zamkniętego. Powodem jest fakt, że położenie pokazanego przetwornika nie mierzy położenia obciążenia względem Ziemi, tzn. wyrażenia sztywności są wewnątrz pętli. Podatność napędu wewnątrz pętli oznacza, że serwozawór musi przepuścić więcej oleju kiedy kompensuje siłę zakłócenia. Podatność napędu pośrednio wpływa na sztywność pętli zamkniętej przez redukcję maksymalnej wartości K VX. Ponadto należy zauważyć, że
54 54 zawsze korzystne jest montowanie przetwornika tak, by mierzył położenie obciążenia względem Ziemi, np. może tylko istnieć możliwość pomiaru położenia obciążenia względem korpusu siłownika. W tym przypadku sztywność obliczona w równaniu 2.19 jest użyta szeregowo z c s a zatem układu nie można uczynić sztywniejszym niż c s. Położenie przetwornika może więc mieć duży wpływ na sztywność całego układu. Sztywność obciążenia wpływa na dokładność statyczną, a nieliniowości w serwozaworze jak: histereza, zerowe przesunięcie związane z temperaturą i ciśnieniem zasilającym, czułość progowa oraz nieliniowości w układzie wykonawczym jak: tarcie i luz, powodują niedokładności nawet w przypadku braku zakłóceń zewnętrznych. Luz w układzie wykonawczym i sprzężenie czujnika są sprawą najważniejszą z punktu widzenia dokładności. Jest to szczególnie widoczne, gdy luz występuje wewnątrz serwopętli, ponieważ wywołuje cykl graniczny o niskiej amplitudzie, ograniczający maksymalną wartość K VX. Problemy stabilności wynikłe z luzu są trudne do przewidzenia i należy dążyć do sztywnego układu napędowego. Czułość progowa serwozaworu wywołuje błędy podobne do powstających z luzu. Nieliniowości w dobrze wykonanym serwozaworze nie powinny przekraczać 5% prądu znamionowego. Kolejne 5% zapewnia pokonanie dowolnego tarcia jakie może wystąpić w układzie sterowania, rys.2.8, co oznacza, że może być niezbędne aż 10% prądu znamionowego dla osiągnięcia prędkości zerowej. Z rys.2.8b przy sygnale U 1 =0, uchyb położenia potrzebny do wytworzenia prądu daje niepewność wyjściowego sygnału położenia: 01. i K i r Q r Qr / A X u 2.20 K K 10A K 10K x PI Zatem niedokładności położenia statycznego na skutek nieliniowości w pętli są funkcją maksymalnej prędkości wyjścia podzielonej przez wzmocnienie prędkości pętli. Inny typ uchybu położenia, zwany uchybem nadążnym, występuje gdy sygnał zadany wzrasta ze stałą szybkością. Przyjmując, że rozpatrywany serwomechanizm położenia ma nadążać za zaprogramowanym sygnałem zadanym, składającym się z faz: narastania ze stałą prędkością i stałego położenia, z rys.2.8b widać, że skończony sygnał uchybu musi być utrzymywany dla wygenerowania potrzebnej prędkości V ẋ. Wielkość tego uchybu nadążnego wynosi: VX VX X f 1 K e 1 K AV K K V K x x PI Q VX 2.21 Uchyb nadążny jest wprost proporcjonalny do prędkości sygnału zadanego i jest minimalizowany przez zastosowanie wysokiego wzmocnienia prędkości pętli.
55 55 Omawiane dotąd uchyby to te, które można zminimalizować przez napiętą serwopętlę (wysokie K VX ). Do uchybów tych należy dodać błędy w mechanizmie przetwornika. W charakterystyce dynamicznej różnych składników serwomechanizmu najważniejszą jest dynamika obciążenia i układu napędowego. Na podstawie rys.2.8a, sztywność otwartej pętli K t, jest szeregową kombinacją c a i c s. Na c a składają się połączenia i sztywność oleju między serwozaworem a siłownikiem. Masa obciążenia łączy się z podatnością napędu generując ruch oscylacyjny drugiego rzędu, mający częstotliwość własną L Kt / m. Pierwotnymi źródłami tłumienia dla tego rezonansu obciążenia są tarcie i przeciek hydrauliczny, przy czym współczynnik tłumienia jest zwykle mały ( typowo 0.1). Dynamikę serwozaworu można opisać równaniem drugiego rzędu z tłumieniem. Nadmierne wzmocnienie pętli powoduje niestabilność dynamiczną obciążenia lub drgania serwozaworu. Jeśli obciążenie ma niższą częstość własną niż serwozawór, można otrzymać w miarę dobrze zachowującą się odpowiedź pętli zamkniętej przy (prawidłowy współczynnik tłumienia do 0.5). Ponieważ trudno jest K d VX L L ocenić d L, wartość 0.1 jest zwykle adekwatną dla oceny: K VX max L Utrzymanie powyższej relacji daje odpowiedź skokową obwodu zamkniętego, pierwszego rzędu z nałożonymi na nią kilkoma oscylacjami niskoampitudowymi. Stała czasowa tej odpowiedzi jest w przybliżeniu równa 1/K VX, tak jak w przypadku przed rozpatrywaniem składników dynamicznych w pętli. Jeśli serwozawór posiada niższą częstość własną niż obciążenie, stabilną odpowiedź można otrzymać przy wzmocnieniu pętli: K VX max. Odpowiedź pętli zamkniętej w tym przypadku stanie się z natury drugiego rzędu, z częstością własną ok. 0.5 V i współczynnikiem tłumienia 0.5. Niższa wartość K VX otrzymana z równań 2.22 i 2.23 jest tą, która powinna być wykorzystywana w równaniach Dominujące równanie określa naturę odpowiedzi dynamicznej pętli zamkniętej. W większości przypadków, odpowiedź dynamiczna przetwornika jest pomijana w porównaniu z drganiami serwozaworu i obciążenia. Jeśli jednak dynamika przetwornika dominuje i można ją opisać jako drugiego rzędu, maksymalna wartość K VX powinna być w przybliżeniu równa iloczynowi współczynnika tłumienia i częstości własnej (do maksymalnej wartości 0.5 częstości własnej). Odpowiedź dynamiczna będzie w tym przypadku bardziej złożona. V
56 Serwomechanizm prędkości Innym typem układu sterowania w obwodzie zamkniętym jest serwomechanizm prędkości. Od strony schematu jest identyczny z serwomechanizmem położenia pokazanym na rys.2.8a, z wyjątkiem tego, że przetwornik dokonuje pomiaru prędkości a nie położenia. Serwomechanizmy prędkości są bardziej powszechnie stosowane do sterowania silnikami hydraulicznymi, rys.2.12, niż do sterowania prędkością liniową. Rys.2.11[33] pokazuje wyidealizowany schemat blokowy serwomechanizmu prędkości. Różnicą między tym schematem a rys.2.8b jest to, że serwomechanizm prędkości nie ma samoregulacyjnego całkowania w pętli. Jak wspomniano wyżej, całkowanie takie pożądane jest dla zminimalizowania uchybów statycznych. Dlatego całkowanie w pętli prędkości jest zapewniane elektronicznie we wzmacniaczu. Ten typ całkowania ma wyraźną przewagę nad typem samoregulacyjnym w serwomechanizmie położenia, ponieważ jest pod prąd wobec nieprawidłowości w pętli, jak też pod prąd miejsc, gdzie wchodzą zakłócenia siły. Uchyby statyczne na skutek tego wpływu są zerowe, gdyż prąd wejścia do serwozaworu będzie się zmieniał dopóki sygnał uchybu nie zostanie sprowadzony do zera. Rys Schemat blokowy układu regulacji prędkości Wzmocnienie prędkości pętli obliczane jest w ten sam sposób jak w przypadku serwomechanizmu położenia: K VV K K K V I Q A 2.24 Występują tu te same jednostki, [s -1 ], ale ich znaczenie jest nieco inne. Jest to teraz bezpośredni pomiar przyspieszenia jakie wygeneruje serwomechanizm dla poprawy uchybu prędkości przejściowej. Jeśli sygnał zadany będzie zaprogramowany tak, że
57 57 wystąpi faza narastania ze stałą prędkością, prędkość wyjściowa będzie nadążać za prędkością zadaną ze skończonym uchybem. Dla wytworzenia przyspieszenia, V.., potrzeba sygnału uchybu e AV / K I K Q. Stąd odpowiedni uchyb prędkości wynosi: V f 1 K e V K V Z uwagi na identyczność dynamiki całkującej serwomechanizmu prędkości z położenia, maksymalną wartość K VV można określić z wyrażeń 2.22, Postać odpowiedzi dynamicznej pętli zamkniętej jest również identyczna. Uchyby statyczne w serwomechanizmie prędkości są determinowane prawie wyłącznie przez charakterystykę przetwornika. Typowymi przetwornikami są: prądnice liniowe, prądu stałego i zmiennego oraz czujniki impulsowe. Tętnienie, liniowość i powolne działanie są najważniejszymi cechami tych urządzeń.. VV 2.25 Rys Przykład układu regulacji prędkości kątowej z kompensacją zakłóceń 2.3. Serwomechanizm ciśnienia Schemat ideowy i blokowy dla typowego układu ciśnienia pokazano na rys.2.13[33]. Przedstawione zależności dla ciśnienia odpowiadają również sile, gdyż siłę i ciśnienie można rozważać w kategoriach zamienności. Schemat blokowy,
58 58 rys.2.13, jest podobny w swojej formie do serwomechanizmu położenia, poza tym, że wejściem zakłóceń jest teraz prędkość V, a wewnętrzna pętla sprzężenia zwrotnego odwzorowuje nieszczelność serwozaworu. Rys Schemat blokowy układu regulacji ciśnienia Prędkość V reprezentuje dowolny ruch, wywołany serwomechanizmem. Pętla ciśnienia ma następujące wzmocnienie prędkości pętli: K Vp K K K K ' fp PI Q t A Jednym ze źródeł statycznych uchybów ciśnienia (opadanie) jest przeciek hydrauliczny w serwozaworze i siłowniku. Przeciek ten wynosi K pq * p o i jest wywołany zmianą Q, która generuje błąd w ciśnieniu równy:
59 59 p d Q K K K fp PI Q A Q K K ' t pq 2 2 KVp A K K ' t Vp p s 2.27 Podstawiając do powyższego równania wyrażenie na K pq = (Q/p o ) otrzymuje się: ' pd ( Q / A) Kt 2.28 p 20( A p ) K o Zatem zawsze obecny jest uchyb ciśnienia, który ma określoną wartość procentową ciśnienia zadanego. Innym źródłem uchybów statycznych są nieprawidłowości układu napędowego i serwozaworu, mogące wynosić do 10% prądu znamionowego. Z rys.2.13 i wartości U 1 =0 wynika, że będzie potrzebny uchyb ciśnienia dla wytworzenia prądu do osiągnięcia przepływu zerowego, a to daje niepewność w ciśnieniu wyjścia: s Vp p u ' ' 01. i Kt KQ i ( Kt / A)( Q / A) 2 K K 10 A K 10 K fp PI Vp Vp 2.29 Licznik powyższego wyrażenia jest maksymalną szybkością zmiany ciśnienia jaką serwomechanizm może wygenerować. Inny typ uchybu występuje dla zastosowań wymagających utrzymania ciśnienia w obecności prędkości obciążenia. Uchyb ten oblicza się przy założeniu, że Q c =0 i U 1 =0: p f V A K K K fp PI Q ' Kt A K Vp V 2.30 Podstawowym elementem dynamicznym pętli jest serwozawór. Drganiom ' obciążenia z L ( Kt cl ) / m Kt / m odpowiada funkcja z dwoma miejscami zerowymi, które mają częstość własną poniżej L. Oznacza to, że wysokie wzmocnienie pętli nie może spowodować niestabilnych drgań obciążenia. W rzeczywistości wysokie wzmocnienie pętli ma tendencję do polepszania stosunku tłumienia drgań obciążenia i zmniejsza jego wpływ w odpowiedzi pętli zamkniętej. Maksymalna, nadająca się do użytku, wartość K Vp może być wyznaczona z równania 2.23, a odpowiedź dynamiczna pętli zamkniętej będzie zasadniczo drugiego rzędu z częstotliwością 0.5 V i współczynnikiem tłumienia 0.5. Dodatkowe uchyby statyczne wywołuje sam przetwornik, zwykle tensometryczny. Niskie poziomy wyjścia czujników tensometrycznych wymagają przetworzenia sygnału
60 60 z wysokim wzmocnieniem, co sprzyja niestabilności wzmacniacza i podatności na szumy. Rys Przykład układu regulacji ciśnienia Parametry pracy dla serwomechanizmów ruchu liniowego przedstawiono zbiorczo w tabeli 2.1, a dla serwomechanizmów ruchu obrotowego w tabeli 2.2[33]. Korzystając z tabel można: * Dobrać przetwornik wielkości wyjściowej, zważając by jego zakres działania odpowiadał zakresowi serwomechanizmu jako całości, a pomiar odbywał się możliwie bezpośrednio i nie był zniekształcony przez zjawiska uboczne. * Określić sztywność napędu i częstość własną obciążenia. Oszacować częstotli-wość własną serwozaworu (można stosować częstotliwość dla 90 stopni opóźnienia fazy odpowiedzi). Upewnić się, czy częstotliwość własna przetwornika jest znacznie powyżej obu tych wartości. * Obliczyć maksymalne wzmocnienie prędkości pętli i określić dynamiczną odpo-wiedź pętli zamkniętej. * Obliczyć niedokładności serwozaworu pamiętając, że niedokładności przetwor-nika dodają się do wartości podanych w tabeli. Wszystkie teoretycznie możliwe do utworzenia układy sterowania dławieniowego można rozpatrywać jako uporządkowaną kombinację dwóch półmostków hydraulicznych zasilanych ze źródła stałego ciśnienia lub stałego natężenia przepływu. Zasady systematyki takich układów wg. W. Backe przedstawiono m.in. w pracy [42].
61 61
62 62 3. DOBÓR DYNAMIKI PODZESPOŁU WYCHYLENIA TARCZY OPOROWEJ Dynamiczne zachowanie się silnika hydrostatycznego z adaptacyjnym sterowaniem wtórnym zależy od dynamiki pozycjonującego podzespołu wykonawczego scharakteryzowanej przez czas wychylenia T wych, zredukowanego na wał jednostki masowego momentu bezwładności mas napędu oraz od funkcji przejścia regulatora. Ze względu na podstawowe znaczenie tych parametrów na zachowanie się układu napędowego, pokazano na rys.3.1 współzależność ich wartości granicznych, pozwalająca ocenić dynamikę napędu. Obszar poniżej wykreślonych krzywych przedstawia zakres pracy stabilnej, a powyżej - niestabilnej. Rys.3.1. Zakresy pracy stabilnej układu sterowania Masowy moment bezwładności został wliczony do współczynnika czasu obiektu regulacji T R, który zdefiniowano następująco [19,20,61]: T R 2 p q 2 M M 2 max gdzie: T R - współczynnik czasu obiektu regulacji [s], J ' g L T 3.1
63 J g - zredukowany na wał jednostki hydrostatycznej całkowity moment bezwładności napędu [kgm 2 ], M T - moment tarcia [Nm], pozostałe oznaczenia jak poprzednio. 63 Już w fazie projektowania można posłużyć się powyższymi parametrami jako wskaźnikami oceny układu sterowania. Jeżeli praktycznie osiągalny czas wychylenia T wych jest większy niż graniczny czas wychylenia wynikający z krzywej, to układ regulacji prędkości obrotowej silnika hydrostatycznego może osiągnąć zadaną prędkość w oscylacyjnym przebiegu przejściowym. Przebieg ten jest tym silniejszy im większa jest różnica między praktycznie istniejącym czasem wychylenia i jego wartością graniczną. Jeżeli osiągalny czas wychylenia jest mniejszy niż czas graniczny, to układ osiągnie zadaną wartość w inercyjnym przebiegu przejściowym o stałej czasowej zależnej wprost proporcjonalnie do różnicy między obydwoma czasami. Przy projektowaniu układu należy zwrócić uwagę, by punkt pracy znajdował się poniżej przedstawionych krzywych granicznych. Można tu także zauważyć, że zmniejszenie czasu wychylenia lub zwiększenie masowego momentu bezwładności powoduje zwiększenie stabilności napędu. Z przebiegu krzywych wynika również, że zastosowanie regulatora PID w porównaniu z P, zwiększa graniczny czas wychylenia. Znaczy to, że przy tym samym współczynniku T R czas wychylenia T wych może być większy, a przy jednakowym czasie wychylenia może być mniejszy moment bezwładności. Wraz ze zmniejszaniem się masowego momentu bezwładności i wzrastającą w związku z tym dynamiką należy zastosować wyższej jakości regulator prędkości. W praktyce taka sytuacja może zdarzać się wówczas, gdy np. wskutek występującej przekładni między regulowaną osią i napędem nastąpi, proporcjonalnie do kwadratu przełożenia, zmniejszenie oddziaływania masowego momentu bezwładności na regulowaną oś. Wszelkie trudności maleją wraz ze zmniejszaniem się czasu wychylenia. Wartości osiąganego czasu wychylenia T wych, z 20% zapasem bezpieczeństwa, dla produkowanych jednostek hydrostatycznych serii A4VS przedstawiono w tabeli 3.1 [19]. Wartości te odpowiadają przypadkowi gdy M L =0 i M T =0. Chłonność jednostkowa w [cm 3 /2 rad] Tabela 3.1 Wartości czasu wychylenia silników hydrostatycznych A4VS Czas wychylenia w [ms] Masowy moment bezwładności w [kgm 2 ] Wymagane natężenie przepływu oleju sterującego w [dm 3 /60s]
64 64 Redukcja podanego czasu jest obecnie trudna, gdyż osiągnięto granicę mechanicznej wytrzymałości zmęczeniowej części składowych. Wpływ czasu wychylania i zredukowanego na oś obrotu tarczy oporowej masowego momentu bezwładności na odchyłkę prędkości kątowej wału, przy skoku momentu obrotowego obciążenia M L od biegu jałowego do przykładowo 70% wartości maksymalnej, przedstawiono na rys.3.2[19,26]. Rys Wartość maksymalnej odchyłki prędkości kątowej przy skoku momentu obciążenia Podane przebiegi stanowią podstawę dla wyprowadzenia zależności na spadek prędkości kątowej wału: t1 X Twych Top, 3.2
65 t 1 65 M L ( t) M 2 ( t), J M L ( t) M 2 ( t) dt J 0 2 g g, 3.4 X M M L 2 max 3.5 Nie uwzględniając oddziaływania serwozaworu w obwodzie sterowania, jednostka przestawia się w czasie wychylenia T wych na maksymalną objętość jednostkową bezpośrednio po skoku momentu obciążenia. W początkowym okresie moment obrotowy na wale, określony przez kąt wychylenia, jest mniejszy niż moment obciążenia. Obroty maleją tak długo, aż oba momenty zrównają się, np. przy X=0.7. Dalszy wzrost momentu M 2 powoduje, że napęd przyspiesza aż osiągnie obroty początkowe. Następnie moment na wale maleje by zrównać się z momentem obciążenia, gdyż w przeciwnym razie obroty wzrastałyby dalej. Uwzględniając serwozawór w obwodzie sterowania wprowadza się opóźnienie T op w przebiegu momentu obrotowego na wale jednostki hydrostatycznej, co skutkuje większą odchyłką obrotów i późniejszym osiągnięciem stanu ustalonego. Opóźnienie T op zależy od częstości własnej serwozaworu i określone jest zależnością: T op 2 Powszechnie znany jest fakt, że wzrost częstości V poprzez zmiany konstrukcyjne jest korzystniejszy dla dokładności sterowania obrotów niż ulepszanie mechanicznego układu wychylania tarczy oporowej. Przy założeniu, że regulator elektroniczny jest optymalnym regulatorem prędkości, (wzmocnienie prędkości pętli K V 100 ), można odchyłkę prędkości kątowej obliczyć następująco: bez opóźnienia czasowego spowodowanego przez serwozawór: 1 V 3.6 X 2 4 p q J 2 max g T wych 3.7
66 66 z opóźnieniem czasowym powodowanym przez serwozawór: gdzie: 2 X 4 p q J 2 max g T wych 1 2 T X T op wych - przyrost prędkości kątowej [rad/s], q 2max - maksymalna chłonność jednostkowa [m 3 /rad], p - ciśnienie robocze [MPa], J g - zredukowany masowy moment bezwładności [kgm 2 ], T wych - czas wychylenia [s], definiowany dla zakresu: od 0 do max, T op - czas opóźnienia [s], V - częstotliwość własna serwozaworu [Hz], M 2max - maksymalny moment obrotowy na wale silnika [Nm], M L - moment obrotowy od obciążenia [Nm]. 3.8 Jak wynika ze wzorów na, spadek prędkości kątowej jest tym mniejszy, im jest większy zredukowany masowy moment bezwładności. Cecha ta sprzyja pozornie konstrukcji silnika elektrycznego ze względu na jego duży własny moment bezwładności. Podstawową wielkością jest jednak czas wychylenia T wych, który określa narastanie momentu obrotowego. Silnik elektryczny może wprawdzie osiągnąć w szczelinie powietrznej w ciągu 15 do 20 [ms] swój moment obrotowy, jednakże proces narastania momentu obrotowego nie ma znaczącego wpływu na przyspieszenie kątowe wału ze względu na duży własny moment bezwładności. Jednostka hydrostatyczna tłoczkowo-osiowa A4VS o parametrach jak w tabeli 3.1, mocy pozornej 350 [kw], ma czas wychylenia T wych = 60 [ms] i kilkakrotnie większe przyspieszenie kątowe wału w porównaniu z odpowiednimi silnikami elektrycznymi. Porównanie silników hydraulicznych sterowanych przez zmianę chłonności jednostkowej z elektrycznymi, pod względem maksymalnych przyspieszeń w funkcji mocy pozornej, przedstawiono na rys.3.3[19,26]. Wynika z niego, że aktualnie stosowane rozwiązania dla silników hydraulicznych, określone przez zakres B-B1, znacznie przewyższają swoimi parametrami silniki elektryczne mimo że nie wyczerpują istniejących możliwości. Przesunięcie krzywej B1 w kierunku teoretycznie możliwej krzywej A można osiągnąć przez: Zmianę konstrukcji mechanizmów roboczych w jednostkach hydraulicznych umożliwiających dalszą redukcję czasu wychylenia. Udoskonalenie układu elektrycznego przetwarzania sygnałów, zwłaszcza z: czujnika obrotów, zwrotnego sprzężenia kąta wychylenia tarczy oporowej oraz serwozaworu.
67 67 Opracowanie regulacji cyfrowej, której celem powinien być regulator adaptacyjny, rozpoznający zmiany parametrów i samoczynnie optymalizujący swoje działanie odpowiednio do tych zmian. Rys.3.3. Maksymalne przyspieszenia wału w funkcji mocy pozornej obecnie produkowanych silników hydrostatycznych i elektrycznych A- sterowanie przez zmianę chłonności jednostkowej (teoretycznie możliwe wartości), B B1 -- sterowanie przez zmianę chłonności jednostkowej (stan obecny), C - serwosilniki prądu stałego, D - serwosilniki prądu trójfazowego, E - silniki prądu trójfazowego o regulowanej częstotliwości, F - silniki prądu stałego z chłodzeniem zewnętrznym Podstawowa w badaniach dynamicznych funkcja skokowa w praktyce nie występuje, gdyż przyspieszenie musiałoby być wtedy nieskończenie duże. Realne przebiegi przy przesterowaniu jednostki hydrostatycznej przedstawiono na rys.3.4[19,26], przy czym moment obciążenia narasta tu trapezowo. Gdy wzrost momentu obciążenia jest szybszy od wychylania się jednostki, powstaje także odchyłka prędkości kątowej, jednakże jest o wiele mniejszą niż przedstawiona na rys.3.2[19,26].
68 68 Rys.3.4. Wartość maksymalnej odchyłki prędkości kątowej przy trapezowym skoku momentu obciążenia Odchyłkę prędkości kątowej można obliczyć następująco: bez opóźnienia czasowego spowodowanego przez serwozawór: X p q 4 J 2 2 max g T wych 1 TL X T wych z opóźnieniem czasowym powodowanym przez serwozawór: 2 X pq 2 T 2 max op TL Twych 1 4 J X T X T gdzie: T L - czas narastania momentu obciążenia [s], pozostałe oznaczenia bez zmian. g wych wych
69 69 Uwzględniając w powyższych zależnościach wartości parametrów dla jednostki hydrostatycznej A4VSO250DS zamieszczone w tabeli 3.2[19], wyznaczono odchyłki prędkości kątowej. Kolumna 1 i 2 odpowiada skokowi momentu obciążenia bez i z czasem zwłoki T op spowodowanym przez serwozawór, kolumna 3 i 4 - podobnie przy trapezowej zmianie obciążenia. Przyjmując dla serwozaworu 4WS2E10 częstotliwość własną V=45 [Hz], otrzymano czas zwłoki: 1 1 T op 354. [ms] V Tabela 3.2 Wartości parametrów do obliczeń odchyłki prędkości kątowej dla jednostki hydrostatycznej A4VS0250DS T wych ms T L ms T op ms J g = 10 J e kgm 2 p MPa M max Nm X % q cm 3 /2 rad rad/s (symulacja) 18.4 rad/s J e - masowy moment bezwładności jednostki hydrostatycznej. Zgodnie z zaleceniem API 160 o stabilności układu, zredukowany masowy moment bezwładności J g podlegający regulacji odpowiadał 10-ciokrotnej wartości momentu bezwładności jednostki hydrostatycznej. W kolumnie 2 porównano wyniki z obliczeniami symulacyjnymi, otrzymując wystarczająco dobrą zgodność, zwłaszcza przy uzyskaniu stabilności z rzeczywistym wzmocnieniem w obwodzie regulacji obrotów, a także z uwzględnieniem tarcia spoczynkowego. Optymalną stabilizację pracy układu regulacji prędkości kątowej osiąga się wówczas, gdy: * sterowana jednostka ma wystarczającą nadwyżkę momentu obrotowego na przyspieszanie lub opóźnianie wału, * po osiągnięciu zadanej prędkości kątowej nadwyżka momentu wyjściowego na przyspieszanie lub opóźnianie wału jest równa zeru.
70 70 Powyższe wymagania mogą być spełnione jedynie wówczas, gdy: pomiar prędkości kątowej może przebiegać bez wpływu sygnałów zakłócających, zmiana momentu obrotowego lub kąta wychylenia tarczy oporowej występuje możliwie bez opóźnienia. Wymagania te można zrealizować najdokładniej przez przekształcanie sygnałów analogowych w cyfrowe, a korzyści stąd wynikające polegają na znacznej rozdzielczości pomiaru, która np. dla kąta obrotu zależy jedynie od liczby impulsów przetwornika na jeden obrót. Ponadto w sterowaniu mikroprocesorowym istnieje duża elastyczność dotycząca realizacji bardziej kompleksowych lub nowych typów regulatorów, oraz możliwość dokonywania zmiany lub dopasowania istniejących algorytmów przez zmianę programu. W praktyce spełnienie tych wymagań napotyka również na ograniczenia wynikające ze sposobu działania sterowania. Im dokładniej można spełnić obydwa wymienione warunki, tym koncepcja regulacji okaże się w działaniu bardziej stabilną. Warunki, których spełnienie jest wymagane dla osiągnięcia optymalnej stabilności napędu, opisano przykładowo dla trzech odmian adaptacyjnego sterowania wtórnego, rys.3.5(a,b,c)[25]. a) b) c) Rys.3.5. Układy adaptacyjnego sterowania wtórnego prędkości kątowej a - ze sterowaniem bezpośrednim, b - ze sprzężeniem drogi, c - ze sprzężeniem siły
71 71 Jak opisano wcześniej w rozdziale 1, układ ze sterowaniem bezpośrednim, rys.3.5a, ze względu na bezpośrednie oddziaływanie sygnału sterującego na siłownik sprawia wiele problemów podczas pracy w stanach nieustalonych. Ruch siłownika powoduje powstanie dodatkowego przepływu zniekształcającego sterujący sygnał ciśnieniowy, który zgodnie z wyżej wspomnianymi warunkami powinien być zależny jedynie od różnicy natężeń przepływu między zaworem dławiącym 3 i elektrycznie sterowanym regulatorem 2. Celem poprawienia własności dynamicznych wprowadzono w kolejnych odmianach serwozawór. W układzie ze sprzężeniem drogi ruch siłownika jest połączony sztywno z serwozaworem 4 przez drążek i obudowę, rys.3.5b. Sterujące natężenie przepływu Q SV, wpływające zakłócająco na układ regulacji, jest teraz znacznie mniejsze a działanie serwomechanizmu 4, 8 znacznie szybsze. Zakłócające działanie natężenia przepływu Q SV stanie się praktycznie dowolnie małe Q SV 0 jeżeli pomiędzy siłownikiem 4 i serwozaworem 8 zostanie wbudowane siłowe sprzężenie zwrotne, jak na rys.3.5c. Tłoczek serwozaworu wykonuje tu jedynie ruchy wokół położenia zerowego, do których praktycznie nie potrzebuje jakiegokolwiek natężenia przepływu oleju Q SV 0. Układ wychylenia działa bez opóźnienia a układ regulacji jest stabilny we wszystkich stanach pracy. Rys.3.6. Reakcja jednostki hydraulicznej na skokowe zmiany obciążenia przy różnych odmianach sterowania adaptacyjnego
72 72 Na rys.3.6[25] przedstawiono reakcję wału silnika na skokowe zmiany obciążenia dla układów regulacji: A - wg rys.3.5a, B - wg rys.3.5b i C - wg rys.3.5c. Wyraźnie można zauważyć, że zgodnie z oczekiwaniami stabilność układu wzrasta w kolejności: A, B i C. Stabilność odmiany C jest na tyle optymalna, że dla poprawienia dokładności stanu ustalonego można wbudować część całkującą do obwodu regulacji, wskutek czego odchyłki stanu ustalonego występujące w odmianach A i B, można całkowicie wyeliminować po upływie 1 2 [s]. Również przy silnych wahaniach obciążenia nastąpi doregulowanie na wstępnie nastawioną wartość 2o ze względu na podatne sprzężenie zwrotne. Wymagania dotyczące dokładności można, jak już zaznaczono, znacznie zwiększyć przez zastosowanie prądnicy bądź przetwornika impulsowego zamiast tachometru hydraulicznego. Decydujące znaczenie ma wtedy elektroniczny układ regulacji, gdzie dokładność i precyzja napędu zależą wyłącznie od przetwarzania sygnałów, rys.3.7. Przykładowo, przetwornik impulsowy IG emituje i rzecz =5000 [impulsów/obrót] z rozpoznaniem kierunku obrotu, które są przez mikroprocesor porównywane na liczniku 32-bitowym z zadanymi impulsami wejściowymi i zad. Wtedy w zakresie prędkości obrotowej n= [obr/min] i pozycjonowania U= [obrotów] można osiągnąć dokładność wynoszącą U= 0.01 [obrotu]. Wartość U wynika z licznika 32-bitowego: U = 2 32 / Większe wartości można uzyskać przechodząc z licznika 32-bitowego na 48-bitowy. Rys.3.7. Układ regulacji prędkości kątowej z nadrzędnym układem pozycjonowania W przedstawionym rozwiązaniu z nadrzędnym układem regulacji pozycjonowania, rys.3.7, na podstawie częstotliwości impulsów otrzymywanych przez mikroprocesor, według komputerowego programu zostaje wyznaczona wielkość zadana U zad dla układu regulacji prędkości kątowej. Równocześnie mikroprocesor, przez rejestrację przebiegu w czasie wartości zadanej i rzeczywistej, wywiera wpływ na parametry regulatora tworząc adaptacyjny układ regulacji. Układ ten przedstawia bezdławieniowo działający
73 73 elektrohydrauliczny wzmacniacz momentu obrotowego z cyfrowym wejściem sygnałów. Przez wprowadzenie czynnych kolejno czasów trwania impulsów, posługując się sterowaniem komputerowym i wstępnie ustalonymi wykresami przebiegów, można w podanych granicach błędu równocześnie i precyzyjnie regulować: położenie, prędkość i przyspieszenie. Przy tej samej dynamice układu elektroniczne opracowanie sygnałów ma następujące zalety w porównaniu z hydraulicznym: * zmniejsza się zapotrzebowanie mocy o moc niezbędną przy hydraulicznym opracowaniu sygnałów na konieczne do tego elementy, jak: pompy sterujące, zawory, dławiki, przewody itd., * proste włączenie w nadrzędne obwody regulacji, * łatwe dopasowanie do różnych obiektów regulacji przez zmianę parametrów w układzie pozycjonowania a tym samym przez dobór charakterystyk czasowych regulatora. Koncepcja napędu z adaptacyjnym sterowaniem wtórnym otwiera przed napędem hydraulicznym nowe możliwości zastosowań i prowadzi do interesujących rozwiązań, które mogą z powodzeniem zastępować regulowane napędy elektryczne. Na korzyść hydrauliki przemawia ta cecha, że prędkość kątowa pozostaje w znacznym stopniu stabilna przy uderzeniowych zmianach momentu obrotowego, a ze względu ma małe momenty bezwładności można zmiany dynamiczne zrealizować w ciągu nadzwyczaj krótkiego czasu. Przedstawione przykłady praktycznego zastosowania stanowią dowód, że napęd ten wykazuje zalety dotyczące nie tylko względów energetycznych i odzysku energii.
74 74 4. MODEL SILNIKA ZS Z REGULATOREM R4E LUB R4V W modelu silnika wysokoprężnego, zgodnie z jego strukturą fizyczną, można wyodrębnić następujące submodele cząstkowe, rys.4.1, [28]: * model układu paliwowego, * model procesu termodynamicznego, * model układu mechanicznego, * model regulatora obrotów. * Rys.4.1. Schemat strukturalny modelu silnika Jako założenie podstawowe przyjęto, że modelowanie dotyczy obiektu fizycznie istniejącego oraz występuje pełna zgodność modelu z wynikami badań w stanie statycznym, co pozwala na korzystanie z charakterystyk doświadczalnych silnika i jego podzespołów. Dynamiczne zachowanie się silnika, jako obiektu sterowania, wynika z bezwładności mas wirujących w podukładzie mechanicznym silnika oraz z dynamiki regulatora sterującego wielkością dawki paliwa. Modele: układu paliwowego oraz procesu termodynamicznego mogą być więc modelami statycznymi, które aproksymują odpowiednie charakterystyki doświadczalne, natomiast modele układu mechanicznego i regulatora obrotów - modelami dynamicznymi. Model układu paliwowego Model układu paliwowego stanowi zależność wiążącą natężenie przepływu paliwa z prędkością obrotową (lub kątową) silnika oraz parametrem regulacji wydatku jednostkowego pompy paliwowej. W silnikach wysokoprężnych stosowane są obecnie dwa typy pomp: rzędowe typu BOSCH i rozdzielaczowe CAV. Mimo różnic konstrukcyjnych oba typy można opisać tymi samymi charakterystykami, a mianowicie:
75 Dawka paliwa w [mm3/wtrysk] 75 Regulacyjną, tj. zależnością dawki jednostkowej q pompy od położenia y elementu sterującego dawką przy stałej prędkości kątowej p wałka pompy: q f ( 1 y ) przy p = const. 4.1 Charakterystyka regulacyjna dla większości rozwiązań konstrukcyjnych jest w dużej mierze liniowa i nie zależy od prędkości kątowej. Wystarczy więc tylko znajomość dawki minimalnej dla biegu jałowego i dawki maksymalnej, odpowiadającej charakterystyce zewnętrznej silnika oraz prędkości nominalnej. Szybkościową, tj. zależnością dawki jednostkowej q pompy od jej prędkości kątowej p przy stałym położeniu y elementu sterującego dawkę: q f 2 ( p ) przy y = const. 4.2 gdzie: q - dawka jednostkowa pompy [mm 3 /wtrysk], y - przesunięcie elementu sterującego wielkością dawki [mm], p - prędkość kątowa wałka pompy [rad/s]. Aproksymacja rodziny charakterystyk szybkościowych pozwala na otrzymanie zależności, która określa wielkość dawki jednostkowej pompy w funkcji jej prędkości kątowej i położenia elementu sterującego. Na rys.4.2 przedstawiono powyższe charakterytyki dla pompy paliwa P76G3u- 9.06/FVR produkcji WSK w Mielcu. Charakterystyka pompy P76G3u-9.06/FVR przesunięcie listwy w [mm] Prędkość obrotowa w [obr/min] Rys.4.2. Charakterystyki pompy paliwa P76G3u-9.06
76 Zużycie paliwa 76 Masowe natężenie przepływu paliwa zależy od dawki jednostkowej, prędkości kątowej silnika, gęstości paliwa i wyraża się wzorem [60]: Ge i q(, y) 4.3 gdzie: G e - godzinowe zużycie paliwa [kg/h], i - liczba cylindrów silnika, - gęstość paliwa [kg/m 3 ], - prędkość kątowa silnika [rad/s]. Prędkość kątowa p wałka pompy paliwowej zależy liniowo od prędkości kątowej silnika: p i p (i p -przełożenie w układzie przeniesienia napędu z wału korbowego silnika na wałek pompy; najczęściej i p =0.5). Model procesu termodynamicznego Model procesu termodynamicznego stanowi zależność wiążącą ze sobą moment efektywny (użyteczny) silnika z natężeniem przepływu paliwa i prędkością kątową silnika, a w celu jego utworzenia wykorzystać można charakterystyki obciążeniowe silnika wykonane dla różnych prędkości kątowych (obrotowych). Przykładowo dla silnika D2156 MAN z pompą P76G3u-9.06/FVR przedstawiono je na rys.4.3. Charakterystyka silnika D Prędkość obrotowa Moment obrotowy Rys.4.3. Charakterystyki obciążeniowe silnika D2156
77 Moment obrotowy [Nm] 77 Charakterystykę zespołu silnik-pompa paliwa, łączącą modele: procesu termodynamicznego i układu paliwowego, przedstawiono na rys.4.4[40]. Charakterystyka silnika D2156 z pompą P76G3u Przesunięcie listwy w pompie [mm] Prędkość obrotowa [obr/min] Rys.4.4. Charakterystyka zespołu silnik-pompa paliwa Charakterystyki otrzymywane z badań są w postaci stablicowanej zbiorem punktów {M e,y, }, będącym dyskretną reprezentacją nieznanej zależności. Punkty te stanowić mogą węzły interpolacji liniowej elementami trójkątnymi w przestrzeni trójwymiarowej, rys.4.5 [3], a odpowiedni program może pozwolić na przetworzenie zbioru danych z pomiarów na potrzebną charakterystykę silnika, rys.4.4. Wcześniejsze badania [1,4,27,28,36,57,60] wykazały, że dla silnika ZS można stosować w badaniach symulacyjnych model wynikający z charakterystyki statycznej. Rys.4.5. Schemat przestrzenny interpolacji liniowej w przestrzeni trójwymiarowej
78 78 Model układu mechanicznego Model ten stanowi równanie równowagi momentów zredukowanych do osi obrotów silnika: J d dt M y M t s e L, 4.4 gdzie: J s - zredukowany do osi wału silnika moment bezwładności, wraz z kołem zamachowym i sprzęgłem w [kgm 2 ]; w przypadku połączenia silnika z odbiornikiem mocy z momentem J s sumuje się, zredukowany na oś wału silnika, moment bezwładności układu napędowego i odbioru mocy, M L - zredukowany do osi wału silnika moment oporów ruchu układu napędowego i odbioru mocy [Nm], M e - moment obrotowy generowany przez silnik [Nm]. Model regulatora obrotów Regulator obrotów jest zwykle zintegrowany konstrukcyjnie z pompą paliwową, a istniejąca różnorodność rozwiązań powoduje, że odpowiedni model trzeba tworzyć dla konkretnego typu. W analizowanym przypadku będzie to regulator R4E z korektorem firmy Friedmann und Maier. Ograniczając rozważania do klasy regulatorów mechanicznych, których pierwowzorem był regulator odśrodkowy Watta, model regulatora tego typu można sprowadzić do równania różniczkowego 2-go rzędu, będącego równaniem ruchu elementów wykonawczych zespołu sterującego [8]: m d 2 y dy R sign dy 2 z z L ( ) Fs ( y) F 2 o ( ) 4.5 dt dt dt gdzie: m z - masa elementów ruchomych, zredukowana na kierunek y [kg], z - zredukowany współczynnik tłumienia lepkiego [Ns/m], R L - opory przesuwu elementu sterującego w pompie, zredukowane na kierunek y [N], F s - siła napięcia wstępnego sprężyn regulatora [N], F o - siła odśrodkowa wirujących ciężarków [N]. I. Model dwuzakresowego regulatora obrotów Regulator R4E, rys.4.6[8], jest regulatorem z poprzeczną sprężyną i oddziaływaniem z zewnątrz na układ dźwigniowy regulatora. Konstrukcyjnie przetwornik prędkości, rys.4.7[8], wyróżnia się napięciem wstępnym i sposobem umieszczenia sprężyn: 1. Sprężyny: środkowa i wewnętrzna (MF + IF = EF) są montowane ze znacznym napięciem wstępnym i wstępują do pracy jednocześnie, rys.4.8.
79 79 2. Sprężyna zewnętrzna (LF) i konstrukcja dolnej miseczki wpływają na drogę biegu jałowego. 3. Sprężyna korekcyjna AF wpływa na drogę korekcji FW-A, czyli na pewne niewielkie przesunięcie regulacyjne między drogami regulacji: biegu jałowego FW 1 i zakresu maksymalnego FW 2. Sprężyna ta nie ma wpływu na regulację dawki nominalnej i na prędkość kątową (obrotową) drugiego zakresu. Jej oddziaływanie kończy się wraz z zakończeniem drogi korekcji. Rys.4.6. Schemat regulatora R4E Rys.4.7 Układ sprężyn z korektorem Na rys.4.8 [8] przedstawiono charakterystykę przetwornika obrotów regulatora R4E z korektorem. Punkty przecięcia linii charakterystyki sprężyn z liniami charakterystyki siły odśrodkowej ciężarka wyznaczają jego położenie, a tym samym podstawowe parametry sprężyn zależą od wyboru charakterystycznych prędkości regulatora i na odwrót. Podstawowe parametry sprężyn w regulatorze R4E z korektorem wyniosły: Tabela 4.1 Sprężyna Napięcie wstępne F o w [N] Ugięcie wstępne h o w [mm] Ugięcie robocze f w [mm] Stała sprężyny c F w [N/mm] LF MF IF AF Wartości prędkości charakterystycznych: n 1 =500[obr/min], n 2 =700[obr/min], n AB =1000[obr/min], n AE =1500[obr/min], n V =2000[obr/min] i n OF =2200[obr/min].
80 80 Rys.4.8. Charakterystyka przetwornika obrotów regulatora R4E z korektorem Na rys.4.9[8] przedstawiono schematycznie najważniejsze ruchome masy regulatora i układu regulacji. Wszystkie masy, które nie są rozmieszczone na osi listwy regulacyjnej, muszą być do niej zredukowane. Dodając poszczególne masy otrzymuje się wyrażenie: mz 2 mfred mmfred mhred mk mst z mpred 4.6 W rozpatrywanym przykładzie uzyskano wartość m z =1.207[kg].
81 81 Rys.4.9. Masy ruchome układu regulacji Siłami oporów ruchu są, poza siłami bezwładności, tarcie Coulomba i tłumienie w ruchomych częściach układu regulacji. Przyjmując sprawność mechaniczną regulatora =0.8, otrzymuje się wartość jednostkowej siły regulacji biegu jałowego: mz RL [N] co jest zgodne z danymi w tablicy 19.1[8]. R L jest siłą, która podczas biegu jałowego przesuwa listwę regulacyjną o 1[mm] na każde zwiększenie prędkości obrotowej regulatora o wartość 50[obr/min]. Zakładając średnią prędkość obrotową biegu jałowego regulatora n śr =250[obr/min] oraz odchylenie histerezy prędkości obrotowej krzywej regulacji na biegu jałowym n= 5[obr/min] otrzymuje się: 2 n 2 5 stopień nieczułości 0. 04, n œr 250 stopień niejednostajności biegu jałowego R L min R L L 2. 5m Z %,
82 82 mechaniczną sprawność regulatora 1 1 co potwierdza przyjętą wartość sprawności. L min %, Tłumienie w ruchomych częściach układu regulacji określa zależność: dy FR z dt przy czym współczynnik tłumienia może przyjmować wartość z = [Ns/m] [8,42] Siłę odśrodkową wirujących ciężarków określa zależność: F m r F gdzie: r - odległość środka masy ciężarka regulatora od jego osi obrotu w [m], zależna od ugięcia FW sprężyn, rys.4.6: 2 p 4.9 r r FW o gdzie: r o - odległość środka masy ciężarka od osi obrotu przy prędkości p odpowiadającej pracy regulatora na biegu jałowym p. Dla charakterystyki sprężyn słuszna jest zależność, rys.4.8: F F c FW s o F 4.11 Między ugięciem FW sprężyn a przesunięciem y 2 listwy regulacyjnej zachodzi zależność, rys.4.6: y c d b a FW Sygnał sterujący y zad od pedału przyspiesznika wywołuje przesunięcie y 1 listwy regulacyjnej: d c y1 yzad 4.13 d
83 83 Uwzględniając powyższe zależności w 4.5 otrzymuje się: m d y dy 10 R sign dy 2 P c a d 2 dt dt dt b c y Z Z L ( ) ( o F a d 2 a d c r1 r 05m r 210 b c b c y a d F ( o). F ( o ) b c oraz y y y gdzie: r 1 - odległość środka masy ciężarka od osi obrotu odpowiadająca napięciu wstępnemu sprężyn korektora. Przykładowe wyniki z badań symulacyjnych przebiegu rozpędzania dla powyższego modelu silnika z regulatorem dwuzakresowym i korektorem przedstawiono na rys.4.14 i II. Model wielozakresowego regulatora obrotów Regulator R4V, rys.4.10[8], jest wyposażony w poprzeczną sprężynę podobnie jak regulator R4E, jednak ze względu na brak sztywności układu dźwigniowego musi mieć ogranicznik listwy regulacyjnej dla dawki pełnego obciążenia. Ze względu na istnienie sztywnego ogranicznika sprężyna naciągowa musi być umieszczona bądź przy dźwigni sterującej, bądź przy łączniku między listwą regulacyjną i dźwignią regulatora. Rys Schemat regulatora R4V 1 - zderzak ograniczający położenie dźwigni dla max, 2 - sprężyna naciągowa, 3 - listwa regulacyjna, 4 - zderzak ograniczający wielkość pełnej dawki, 5 - sprężyna wzbogacacza, 6 - zderzak ograniczający dawkę rozruchową, 7 - nasuwa, 8 - zderzak ograniczający STOP
84 84 Konstrukcja przetwornika prędkości obrotowej charakteryzuje się tym, że poszczególne sprężyny włączają się do pracy kolejno, a ich siła oddziaływania sumuje się. Aby działanie sprężyn nie wywoływało tworzenia się uskoków na charakterystyce, rys.4.12, sprężyny środkowa MF i wewnętrzna IF muszą być montowane bez wstępnego napięcia, a sprężyna wewnętrzna może być montowana nawet ze znacznym luzem, rys.4.11[8]. Rys Sprężyny w regulatorze R4V Rys Charakterystyki przetwornika obrotów regulatora R4V Przemyślane wkomponowanie zakresów działania: FW 1, FW 2 i FW 3 poszczególnych sprężyn w całkowity przedział zakresów wszystkich prędkości obrotowych, rys.4.12, umożliwia oddziaływanie na przebieg charakterystyki przetwornika prędkości obrotowych. Również w regulatorze R4V stosuje się różne kształty dolnej miseczki sprężyn, głównie po to, aby umożliwić dobieranie drogi biegu jałowego. Zachowana jest ogólna prawidłowość, że droga FW 1 sprężyny biegu jałowego jest w regulatorze R4V znacznie mniejsza niż w regulatorze R4E. Podstawowe parametry sprężyn wyniosły: Tabela 4.2 Sprężyna Napięcie wstępne F o w [N] Ugięcie wstępne h o w [mm] Ugięcie robocze f w [mm] Stała sprężyny c F w [N/mm] LF MF IF a odpowiadające im prędkości charakterystyczne: n 1 =500[obr/min], n 2 =700[obr/min], n 3 =1400[obr/min] oraz n OR =2200[obr/min].
85 85 Między ugięciem FW sprężyn, sygnałem sterującym y zad od pedału przyspiesznika VH a przesunięciem y 2 listwy naciągowej 2, rys.5.10, istnieje zależność: c b y d a FW y e d c 2 zad * * 4.16 h d gdzie: e,h - ramiona układu dźwigniowego przyspiesznika VH. Sygnał sterujący y 2 wywołuje przesunięcie y 1 listwy regulacyjnej 3: y y 1 2 c2 * 4.17 c c 2 5 gdzie: c 2 - stała sprężyny naciągowej 2 [N/mm], c 5 - stała sprężyny 5 [N/mm]. Uwzględniając zależności , 4.16 i 4.17 w równaniu 4.5 otrzymuje się równania opisujące ruch regulatora obrotów R4V: m d y dy a d a d c y c2 y1 1 dt dt b c b c F c r r 2 3 a d 0. 5mF ( ro FW * 10 ) b c oraz 2 z F o F o m d y dy z c2 c5 y1 c2 y dt dt gdzie: r 1 - odległość środka masy ciężarka od osi obrotu odpowiadająca napięciu wstępnemu sprężyn korektora, m 1 - masa elementów sztywno związanych z dźwignią sterującą, m 2 - masa elementów sztywno związanych z listwą regulacyjną. Przykładowe wyniki badań symulacyjnych modelu silnika, rys.4.1, z regulatorem wielozakresowym przedstawiono na rys.4.13 i 4.15[41], a dla porównania z podobnym modelem z regulatorem dwuzakresowym i korektorem na rys.4.14 i 4.16[40]. Widoczne są różnice w przebiegu krzywych, odpowiadające sposobom regulacji obrotów silnika. Wyniki potwierdzają poprawność modelu, który może być wykorzystany do badań symulacyjnych układów sterowania w zautomatyzowanym
86 Moment obrotowy w [Nm] i prędkość kątowa w [rad/s] Przesunięcie listwy regulacyjnej w pompie w [mm] Moment obrotowy w [Nm] i prędkość kątowa w [rad/s] Przesunięcie listwy regulacyjnej w pompie w [mm] 86 zespole napędowym pojazdu, np. w hybrydowym układzie napędowym autobusu miejskiego. Przebieg parametrów silnika przy trapezowym wymuszeniu pedałem gazu , , , , ,5-100 Czas w [s] * 10-1 Rys Przebieg rozpędzania silnika ZS z regulatorem wielozakresowym: 1 - przesunięcie listwy w pompie, 2 - prędkość kątowa silnika, 3 - moment obrotowy silnika. Przebieg parametrów silnika przy trapezowym wymuszeniu pedałem gazu Czas w [s] * 10-4 Rys Przebieg rozpędzania silnika ZS z regulatorem dwuzakresowym: 1 - przesunięcie listwy w pompie, 2 - prędkość kątowa silnika, 3 - moment obrotowy silnika.
87 Prędkość kątowa w [rad/s] Prędkość kątowa w [rad/s] 87 Przebieg prędkości kątowych silnika z regulatorem wielozakresowym y=50 y=40 y= y=20 y= Czas w [s] * 10 Rys Przebiegi prędkości kątowej silnika z regulatorem wielozakresowym przy skoku przyspiesznika w zakresie [mm] co 10 [mm] Przebieg prędkości kątowej silnika z regulatorem dwuzakresowym z korektorem y=35 y=25 y= y= Czas w [s] * 10 Rys Przebieg prędkości kątowej silnika z regulatorem dwuzakresowym przy przy skoku przyspiesznika w zakresie [mm] co 5 [mm].
88 88 5. MODEL UKŁADU STEROWANIA PRĘDKOŚCIĄ POJAZDU Budowę elektrohydraulicznego układu regulacji obrotów przedstawiono w poprzednich rozdziałach: 1, 2 i 3. Jego schemat powtórzono na rys.5.1 [15,16,31,32]. Silnik o sterowalnej chłonności jednostkowej jest zasilany z sieci o czynnym ciśnieniu p 0 a wyjście z silnika połączono z przewodem niskociśnieniowym p T. Prądnica tachometryczna bądź jej zamienniki jak: prądnica prądu stałego, maszyna jednobiegunowa (unipolarna), optoelektroniczny czujnik obrotów, napędzana z wału silnika wytwarza sygnał proporcjonalny do obrotów 2. Uchyb (różnica) między sygnałem zadanym 2zad i rzeczywistym 2 doprowadzony przez wzmacniacz do regulatora PID steruje serwozaworem. Zasilanie zaworu zrealizowano z sieci przez filtr. Sprężyna c a służy głównie do pozycjonowania siłownika a jej wpływ na dynamikę układu napędowego ma znaczenie drugorzędne. Podstawą działania tej regulacji jest oddziaływanie na moment obrotowy M 2, wymagany dla realizacji założonych obrotów. Dynamiczne właściwości decydują o szybkości układu pozycjonowania i przyspieszeniach przyłączonego obiektu regulacji - w tym przypadku pojazdu z zależnymi od obrotów oporami ruchu. Właściwości obiektu regulacji zależą od masowego momentu bezwładności oraz tej części momentu napędowego, którą określa zmiana obrotów tj. szybkość z jaką pojazd reaguje na zmiany momentu. Rys.5.1. Układ regulacji prędkości hydrobusu
89 89 Obiekt regulacji składa się z silnika o zmiennej chłonności i sprzęgniętego z nim obciążenia. Równanie ruchu obiektu jest postaci: J gdzie: R H M T R dm d q p y M ( M M ( 1 )) sign max H L T 2 hm 2 ymax L 2 - obciążenie zależne od prędkości 2, - moment od sił tarcia w silniku i przyłączonym obciążeniu, M2 q2 p - moment na wale silnika hydrostatycznego, p p 0 p T, hm - sprawność mechaniczno-hydrauliczna silnika. Z powyższego równania wynika, że obiekt regulacji ma własności całkujące ze zmniejszającym się do zera obciążeniem R H i tym samym jest niezrównoważony. Do ustawiania tarczy oporowej służy napęd, którego schemat przedstawiono na rys.5.2[9,10,11,32]. Przy założeniu stałej wartości ciśnienia p 0 : p p p A B i symetrycznej budowie serwozaworu zależność na przepływ oleju jest w postaci: gdzie: 1 p0 QA QB QL BV ( x0 V xv x0 V xv ) p0 BV ( x0 V xv x0 V xv ) 2 2 pl pa pb, p0 pl p0 pl pa ; pb. 2 2 B V - współczynnik przepływu przez krawędź sterującą suwaka w serwozaworze, x 0V - wartość przekrycia suwaka w serwozaworze, x V - przesunięcie suwaka. p L p L 5.3
90 90 Rys.5.2. Układ wychylenia tarczy oporowej w jednostce hydrostatycznej a) schemat połączeń hydraulicznych b) schemat przepływu sygnałów Z bilansu objętości cieczy dla siłownika można wyznaczyć przyrost ciśnienia p L : 2 pl ( QL y A GL pl ) dt 5.4 c gdzie: H G L - współczynnik przecieków w siłowniku, ' E ol - moduł ściśliwości oleju, V OA i V OB - objętość komory siłownika w środkowym położeniu, c H - ściśliwość obwodu hydraulicznego; przyjmując, że V OA i V OB nie zależą ' od pozycji tłoczyska a E ol jest stałe, otrzymuje się:
91 Ruch siłownika opisuje równanie: c H 91 VOA VOB 5.5 ' ' E E ol ol m y d L y y ca A pl Fd FT sign y 5.6 gdzie: F d - siła przestawienia jednostki wyporowej, F T - siła tarcia Coulomba w układzie wychylenia, d L - współczynnik tłumienia. Równania tworzą obraz przepływu sygnałów jak na rys.5.2b. Określenie koniecznej szybkości ustawiania tarczy w zależności od przyłączonego obiektu regulacji jest zadaniem obszernych badań, by w praktyce dać proste w użyciu kryterium stabilności. Niewłaściwe określenie tych zależności czasowych może prowadzić do ruchu oscylacyjnego obrotów. Częściowe propozycje w tym zakresie zamieszczono w rozdziałach: 2 i 3. Rys.5.3. Koncepcje regulacji jedno- i wielowymiarowej
92 92 Na rys.5.3[22,31,47] przedstawiono możliwe koncepcje regulatora, które mogą istnieć jako podzespół analogowy bądź cyfrowy. W praktyce stosuje się regulację jednowymiarową (bez regulatora podrzędnego) lub wielowymiarową z przesunięciem y siłownika jako wielkością pomocniczą. W regulacji jednowymiarowej z regulatorem PID należy starać się by były: * częstotliwości własne zespołu: siłownika L i zaworu V 3 4-krotnie większe niż częstość własna o serwomechanizmu, * sprężystość sprężyny c a w układzie pozycjonowania zbliżona do 0, * czasy: wyprzedzenia (różniczkowania) T V i zdwojenia (całkowania) T N regulatora zbliżone do 0. Uwzględniając powyższe założenia otrzymuje się układ opisany równaniem drugiego rzędu, dla którego może zostać wyznaczona częstość własna o i współczynnik tłumienia D serwomechanizmu. Człony całkujące znajdują się w obiekcie sterowania ( 2 ) i w sprzężeniu przesunięcia (y). o q 2 max p V K o Q P y A max J max d L D 2 o J2 gdzie: V Q - przepływ przez zawór przy i max oraz p.=0, pozostałe oznaczenia jak na rys Pochodzący od silnika i obciążenia, zależny od prędkości, współczynnik d L opisuje jedyny człon tłumiący, którego nie można określić bez wyznaczenia charakterystyki obciążenia. Tłumienie układu wpływa silnie na czas wyprzedzenia T V i zdwojenia T N regulatora, mimo że nie wynika to z uproszczonego równania 5.8. Wielkości V Q i 2max występują w równaniach 5.7 i 5.8, gdyż K P jest bezwymiarowe. W wielowymiarowym regulatorze przesunięcie siłownika pomyślane jest jako pomocnicza wielkość regulacji. Podobnie jak w układzie z drgającą masą i zależnym od prędkości tarciem, sprzężenie zwrotne przesunięcia powoduje wzrost tłumienia układu. Serwozawór został przyjęty tu jako człon opóźniający drugiego rzędu, przy czym jako nieliniowość występuje ograniczenie prędkości suwaka. Dla przejrzystości uproszczono napęd pozycjonowania, gdyż przedstawiono go już na rys.5.2. W wielowymiarowej regulacji całość tworzy system 7 rzędu, który podwyższa się o jeden rząd przy dodatkowym podatnym sprzężeniu zwrotnym. Regulator pokazano w postaci
93 93 połączenia równoległego członów: proporcjonalnego i całkującego, dla którego czas wyprzedzenia T V można wyznaczyć z równania: T V T N 1 Przepływ sygnałów przedstawiony na rys.5.2 i 5.3 jest podstawą dla modelu obliczeniowego, za pomocą którego można odtworzyć rzeczywiste parametry napędu. Wartość V K K 1/ 2mac wynosi w przedstawionym napędzie 3.18*10-3 [s]. Przyjmując, te same założenia jak w regulatorze jednowymiarowym oraz proporcjonalne sprzężenie od przesunięcia (współczynnik K y ), można określić częstość własną o i współczynnik tłumienia D serwomechanizmu przy regulatorze wielowymiarowym. Otrzymuje się wtedy: P D. 5.9 o q 2 max p V K o Q P Q y L y A J V K d J A y max 2 max 2 2 max 5.10 D d J V A y K L Q y 2 2 o gdzie: K y - współczynnik wzmocnienia sprzężenia od przesunięcia y siłownika, pozostałe oznaczenia jak na rys Wzrost wzmocnienia K y sprzężenia prowadzi do proporcjonalnego zwiększenia tłumienia. Dla K y =0 równania 5.10 i 5.11 przechodzą w równania 5.7 i 5.8. Zależny od prędkości współczynnik d L wzrastając liniowo zwiększa tym samym współczynnik tłumienia D, równania 5.8 i Ponadto z równań tych wynika, że można za pomocą sprzężenia przesunięcia y podnieść wartość współczynnika tłumienia gdyż uwzględnienie charakterystyki obciążenia d L /J 2 jest małe wobec członu V Q /A*Ky/y max,. Częstości własne w obu przypadkach regulacji są praktycznie równe. Wartości parametrów regulatora z przepustowością: max 5.11 G s K P 1 1 TV s T s N 5.12
94 94 można w mikroprocesorowym wykonaniu szybko dobrać. Dla T V =T N =0 otrzymuje się regulator proporcjonalny. W wielowymiarowej regulacji korzystne jest proporcjonalne lub podatne sprzężenie zwrotne z przepustowością: G s K T s y y 1 T s Gdy T y powyższy związek staje się proporcjonalny. Jak wynika z przedstawionych zależności model układu sterowania prędkości pojazdu opisują równania różniczkowe, w większości zlinearyzowane, tworząc system co najmniej 8 rzędu. Poprawna praca tego układu zależy nie tylko od doboru parametrów geometrycznych ale również od struktury połączeń sygnałów. Stąd równoczesne prowadzenie badań symulacyjnych i eksperymentalnych jest nieodzowne. y y 5.13
95 95 6. MODEL HYDROPNEUMATYCZNYCH AKUMULATORÓW ENERGII Sposób działania akumulatorów hydropneumatycznych z przegrodą oparty jest na wykorzystaniu ściśliwości gazu do akumulowania energii. Czynnikiem roboczym najczęściej jest azot, gaz obojętny dla otoczenia. Akumulatory gazowe składają się z komory ciśnieniowej podzielonej na przestrzeń gazu i przestrzeń cieczy oraz z przegrody gazoszczelnej. Przestrzeń cieczy połączona jest z układem hydraulicznym, wobec czego przy narastaniu ciśnienia występuje sprężanie gazu w przestrzeni gazowej. Przy spadku ciśnienia sprężony gaz może się rozszerzać, wskutek czego ciecz robocza zostaje wyparta z powrotem do układu hydraulicznego. W ujęciu termodynamicznym akumulator można rozpatrywać jak jednorodny zamknięty układ z odpowiednimi parametrami stanu. Dla gazu idealnego zależność między ciśnieniem, temperaturą i objętością opisuje równanie: p V m R T 6.1 gdzie: R - stała zależna od rodzaju gazu; dla azotu R=297[J/kg K], V - objętość przestrzeni gazowej, T - temperatura gazu, m - masa gazu, p - ciśnienie w przestrzeni gazowej. Wg [52] równanie powyższe jest słuszne dla gazu rzeczywistego (azotu) do ciśnień 1.5 [MPa], tj. przy małych gęstościach. W miarę zwiększania się gęstości zwiększają się odstępstwa od równania Clapeyrona, gdyż nie uzasadnione staje się zaniedbywanie tego, iż cząsteczki zajmują część objętości dostępnej dla gazu, a zasięg działania sił międzycząsteczkowych jest większy niż rozmiary cząsteczek. Z badań [12] nad termodynamicznymi własnościami azotu wynika, że w zakresie normalnych warunków eksploatacyjnych, tj. przy ciśnieniach 5 30 [MPa] i temperaturach [K], azot powinien być traktowany jak rzeczywisty. Ilustracją tego faktu może być zmienność wykładnika adiabaty w funkcji ciśnienia i temperatury, rys.6.1, z którego wynika, że wykładnik ten przyjmuje wartość =1.4 jak dla dwuatomowego gazu doskonałego dopiero wtedy, gdy ciśnienie w układzie jest bliskie ciśnieniu otoczenia.
96 96 Rys.6.1. Wykładnik adiabaty dla azotu w funkcji ciśnienia i temperatury W rzeczywistości działanie akumulatora hydropneumatycznego nie przebiega według założeń teoretycznych, a realizowana przemiana mieści się między izotermiczną i adiabatyczną. Na rodzaj przemiany termodynamicznej wpływa przede wszystkim czas trwania procesu ładowania i rozładowania. Za [44] można przyjąć następujące rozgraniczenie: czas trwania procesu poniżej 60 [s] - przemiana adiabatyczna, czas trwania procesu [s] - przemiana politropowa, czas trwania procesu powyżej 180 [s] - przemiana izotermiczna. Matematyczną zależność między parametrami stanu można dla gazu rzeczywistego wyrazić tylko w postaci równania przybliżającego. Niezbędne jest więc wprowadzanie współczynników korekcyjnych uwzględniających charakterystykę gazu rzeczywistego, którego własności ze wzrostem ciśnienia zmieniają się, zmniejszając rzeczywistą objętość użyteczną. Różnica ta przekracza 3% granicę powyżej 1.5 [MPa] i osiąga 80% przy 50 [MPa], zależnie od zachodzącej przemiany: izotermicznej lub adiabatycznej. Zgodnie z [44] należy stosować następujące wyrażenie na objętość rzeczywistą gazu: V C V gdzie: C = C i dla przemiany izotermicznej, C = C a dla przemiany adiabatycznej. Współczynniki korekcyjne odnoszą się do temperatury 50[ o C]. rzecz ideal 6.2 Przykładowo, przebieg wartości współczynnika C i dla przemiany izotermicznej przedstawia rys.6.2.
97 97 Rys Zależność współczynnika korekcyjnego C i od stosunku ciśnień p 2/p 1 dla przemiany izotermicznej Rys.6.3. Porównanie przebiegu ciśnień dla gazu idealnego i rzeczywistego
98 98 Na rys.6.3 porównano wyliczone ciśnienia z równania gazu idealnego i dla gazu rzeczywistego. Wynika stąd mała przydatność równań: 6.1 i 6.2 do obliczeń akumulatorów, również z uwzględnieniem współczynników korekcji C i. Reasumując należy stwierdzić, że równanie gazu rzeczywistego powinno mieć taką budowę, by dla małych ciśnień jego postacią asymptotyczną było równanie Clapeyrona. Musi ono przy tym zawierać dodatkowe stałe zależne od rodzaju gazu, a im większą jest żądana dokładność równania, tym więcej stałych. Gazy rzeczywiste zbliżają się swymi własnościami do gazu doskonałego tym bardziej im mniejsze są wymiary cząsteczek oraz im większe są odległości międzycząsteczkowe, a więc im niższe jest ciśnienie. Dotąd nie jest znana żadna prosta formuła, która stosowałaby się do wszystkich gazów w dowolnych warunkach, a do wyznaczania parametrów termicznych - ciśnienia, objętości właściwej i temperatury - istnieje powyżej 150 empirycznych równań stanu [14,63]. Spośród nich należy wymienić równania: van der Waalsa, Berthelota, Beattie-Bridgemana, Wukałowicza, Otisa, jako najprostsze i jednocześnie pokazujące ewolucję zmian w równaniu Clapeyrona w przystosowaniu do coraz wyższych ciśnień. Dla określenia sprawności akumulatora hydropneumatycznego pracującego w układzie hydrostatycznym, np. w omawianym napędzie hybrydowym, w pracach wiodących firm [5,48,59] korzysta się z modelu zaproponowanego przez Otisa, w którym modyfikacja równania Clapeyrona uwzględnia zmianę parametrów gazu wraz z ciśnieniem i temperaturą. Równanie gazu jest wtedy postaci: gdzie: z - współczynnik ściśliwości, pozostałe oznaczenia jak poprzednio p V zmr T G 6.3 Zależne od ciśnienia i temperatury wartości: ciepła właściwego c V gazu przy stałej objętości i współczynnika ściśliwości z opisują równania: c V A 1 1 e BT 6.4 gdzie: A a a p a p B b b p b p z C D p E p 2 6.5
99 gdzie: 2 C c1 c2 T c3 T D d d T d T E e1 e2 T e3 T a1, a2, a3, b1, b2, b3, c1, c2, c3, d1, d2, d3, e1, e2, e3 są stałymi o wartościach podanych na rys.6.4, pochodzącymi z aproksymacji wyników z badań gazu rzeczywistego. a) b) Rys.6.4. Wartości rzeczywiste i obliczeniowe: c V i z dla azotu.
100 100 Zaproponowana modyfikacja pozwala dość dobrze odwzorować zależności gazu rzeczywistego przedstawione na rys.6.3. Podczas cyklu pracy akumulatora hydropneumatycznego należy poddać analizie również termodynamiczne procesy wymiany ciepła, które w warunkach pracy przerywanej z szybkimi cyklami obciążeń wyznaczane są przez intensywność przewodzenia, a równanie różniczkowe zmian temperatury gazu powinno wyrażać wpływ wymiany ciepła i zmiany objętości [52]: Wychodząc z różniczki entropii * * * T f ( Q ) f ( V ) 6.6 w ds S T V dt S V T dv 6.7 otrzymuje się po przekształceniach: T GW ( T0 T) m c T m c p T * * V V V gdzie: c V - ciepło właściwe przy stałej objętości, G W - wartość ciepła przewodzonego przez ścianki akumulatora, T 0 - temperatura otoczenia; 300 [ o K], S - entropia. V 6.8 Mając na uwadze powyższe równania , w przypadku modelu Otisa po zlogarytmowaniu i zróżniczkowaniu otrzymuje się: dp p dv V dz z dt T 6.9 Uwzględniając, że współczynnik z zależy od ciśnienia i temperatury to: i stąd: dz z p dp p b a T V * * * V z dt 6.10 T 6.11
101 101 gdzie: 1 1 z 1 1 a b T z T p z Z bilansu ciepła wynika, że: z p 6.12 gdzie: gdzie: dq dw du 6.13 dq - przyrost ciepła przenoszonego z gazu do ścianek naczynia, dw - przyrost pracy wykonanej przez gaz, du - przyrost energii wewnętrznej gazu. Przyrost energii wewnętrznej gazu określa równanie: du m c dt T dc V V 6.14 Przyrost ciepła przewodzonego przez ścianki zbiornika: - współczynnik przepływu ciepła, A S - powierzchnia przepływu ciepła. Przyrost pracy wykonanej przez gaz: dq A T T S dw p dv 6.16 Uwzględniając powyższe oraz różniczkę zupełną ciepła właściwego: otrzymuje się dc V cv p dp cv T dt 6.17 * * * T c V c V T c V T a T c b p V T V c V b V cv p A m c S V p V T0 T 6.18 m c V
102 102 Model Otisa z uwzględnieniem procesów wymiany ciepła opisują więc równania: 10 6 p V zmrg T 6.19 * V V V dt 6.20 * T T0 T p V m c * * V T V c V b V cv p c V T c cv T V at b cv p 6.21 * T T T dt 6.22 p a b T * * * V b V 6.23 * p p p dt 6.24 Do oceny termicznej akumulatorów można posłużyć się stałą czasową procesów termicznych, dla których funkcja przejścia odpowiada z dobrym przybliżeniem elementowi inercyjnemu pierwszego rzędu, równanie 6.21 i rys.6.5: m cv A S m c G W V 6.25 Rys.6.5. Zmiana ciśnienia przy szybkim ładowaniu akumulatora
103 103 Stała czasowa zależy od: wstępnego ciśnienia gazu, konstrukcji akumulatora, jego wielkości, wobec czego najlepiej określać ją doświadczalnie, rys.6.6[44]. Dla badanego akumulatora o objętości użytecznej V 0 =50 [dm 3 ] i wstępnym ciśnieniu gazu p 0 =9 [MPa] stała czasowa wyniosła: =49 [s]. Rys.6.6. Stała czasowa procesów termicznych w akumulatorach pęcherzowych Na rys.6.7 pokazano cykl pracy akumulatora z sumarycznym czasem ładowania i postoju 10 [s]. Z uwagi na to, że czas ten jest kilkakrotnie mniejszy od stałej czasowej =49 [s], zatem charakteryzuje on proces, w którym występują małe straty ciepła i tym samym jest realizowany z wysoką sprawnością. Najmniejszą sprawność otrzymuje się gdy czas cyklu jest wielokrotnością termicznej stałej czasowej. Podczas ładowania gaz znacznie rozgrzewa się. Przyrost temperatury oznacza straty objętości użytecznej oraz wpływa na trwałość ścianek pęcherza oddzielającego gaz od oleju, lub uszczelnień w akumulatorach tłokowych. Istotny jest również przy współpracy małych akumulatorów z pompami o dużej wydajności. Sprawność zależy również od stosunku ciśnień oraz czasu postoju po ładowaniu i rozładowaniu akumulatora w danym cyklu pracy, rys.6.8 [35]. Podczas postoju po ładowaniu występuje spadek ciśnienia w wyniku ochłodzenia się gazu. Im czas ten jest dłuższy tym sprawność akumulatora niższa.
104 104 Rys.6.7. Cykl pracy akumulatora Rys.6.8. Sprawność odzysku energii w akumulatorze hydropneumatycznym przy jednorazowym ładowaniu i rozładowaniu
105 105 Przebieg sprawności akumulatora w zależności od strumienia oleju rozładowującego i czasu względnego ładowania przedstawia rys.6.9, pozwalając oszacować czy poniesione nakłady usprawiedliwiają zastosowanie akumulatora dla oczekiwanej oszczędności energii. Wielkość natężenia rozładowania wpływa nieznacznie na sprawność. Podstawowe znaczenie ma czas zachodzących przemian. W cyklu pracy zbliżonym do przemian izotermicznych sprawność może spaść nawet do wartości 0.5. Rys.6.9. Sprawność cyklu pracy akumulatora Przeprowadzone badania pozwoliły na wstępną ocenę sprawności akumulatorów w hydrobusie. Wykazano, że sprawność ta jest zmienna i silnie zależy od samego cyklu, wobec czego niezbędna jest symulacja pracy całego układu hydraulicznego ze sterowaniem dla różnych warunków ruchu miejskiego.
106 MODEL NAPĘDU HYDROSTATYCZNEGO W hydrostatycznym układzie napędowym, którego prototyp umieszczono w autobusie miejskim, rys.7.1, zadaniem przekładni hydrostatycznej jest zrównoważenie mocy chwilowej wynikającej z prędkości jazdy mocą maszyny hydrostatycznej zamontowanej na moście napędowym. W przeciwieństwie do stopniowej skrzyni biegów występuje tu ciągłe dopasowanie przełożenia w skrzyni bezstopniowej do warunków ruchu. Ponadto w pełni odwracalna jednostka hydrostatyczna umożliwia wraz z akumulatorami odzysk energii kinetycznej pojazdu podczas hamowania. Moc napędu istniejąca do dyspozycji przy naładowanym akumulatorze zabezpiecza krótkotrwałe zapotrzebowania szczytowe. Dodatkowo przez pracę w optymalnym obszarze charakterystyki silnika uzyskuje się jakościową i ilościową redukcję spalin, oraz zwiększenie jego trwałości przez utrzymywanie stałej mocy przy średnich obrotach. Rys.7.1. Napęd hydrobusu Całkowite rozdzielenie prędkości kątowych: 1 - jednostki pierwotnej (pompy) i 2 - jednostki wtórnej (silnika) pozwala na oddzielną optymalizację pracy zarówno silnika spalinowego, pompy jak i silnika hydrostatycznego. Ponadto uzyskuje się wyższą sprawność napędu i mniejszą moc chłodzenia w porównaniu z konwencjonalną przekładnią hydrostatyczną. Taki system napędowy pozwala na sterowanie, w którym kierowca realizuje swoje życzenie o prędkości jazdy V 2 przez wartość zadaną dla regulatora obrotów jednostki wtórnej, tzw. adaptacyjne sterowanie wtórne. Przy
107 107 odpowiednim doborze tej jednostki można dodatkowo znacznie zwiększyć trwałość hamulców samochodu. Z powyższej koncepcji napędu wynika niewielka zmiana obrotów silnika spalinowego [30,51]. Jak zaproponowano w rozdziale 1, silnik pracuje dwustanowo: podczas uzupełniania układu hydrostatycznego w energię, ze stałą prędkością kątową i momentem obrotowym odpowiadającymi maksymalnej sprawności, na biegu jałowym, gdy układ hydrostatyczny nie wymaga uzupełniania w energię. W regulacji obciążenia pompy kąt wychylenia 1 przestawiany jest w zależności od prędkości 1 silnika spalinowego i ciśnienia p tak, żeby wymagany dla pompy moment napędowy M 1 był mniejszy niż moment maksymalny M S silnika odpowiadający 1: M p V 2 1 max max M S 7.1 Wydajność jednostkową i tym samym wielkość pompy dobiera się z wymaganej mocy pozornej N E, maksymalnego ciśnienia p max, maksymalnej prędkości 1max, przy założeniu tych samych współczynników udziału W 1 dla części pierwotnej i wtórnej układu hydrostatycznego: V 1 max ze współczynnikiem W 1 wg równania: p max N E W 1 max W 1 N N E S M Fz max Vo ( ) 1max 1max 1max 7.3 gdzie moc pozorną N E otrzymuje się jako wynik maksymalnej siły napędowej F zmax i maksymalnej prędkości V o pojazdu. Wielkość jednostki wtórnej wynika bezpośrednio z maksymalnej siły napędowej F zmax na kole, maksymalnego ciśnienia p max, promienia dynamicznego koła r d i przełożenia przekładni głównej i g : V 2 max 2 Fz p max max r i g d 7.4
108 108 Dalszym kryterium jest maksymalna prędkość kątowa 2max, która zależy od maksymalnej prędkości pojazdu V o. Użycie odwracalnej jednostki wtórnej wynika bezpośrednio z żądania przyjęcia energii rekuperacji do części wysokiego ciśnienia jak i uzyskania możliwości wpływania na moment hamowania przez zmianę objętości jednostkowej: M 2 p V 2 2 max 2 2 max Odwracalność jednostki wtórnej tj. sterowanie kątem wychylenia 2 w obu kierunkach, wynika z realizacji przy hamowaniu momentu obrotowego przeciwnie skierowanego względem momentu przy napędzaniu. 7.5 Rys.7.2. Warianty pracy w pełni odwracalnej jednostce hydraulicznej W pełni odwracalnej jednostce hydraulicznej możliwa jest praca w czterech obszarach, rys.7.2 [54,55]: * napęd do przodu : w I ćwiartce (u góry na prawo), * napęd do tyłu : w III ćwiartce (u dołu na lewo), * hamowanie do przodu : w IV ćwiartce (u dołu na prawo), * hamowanie do tyłu : w II ćwiartce (u góry na lewo). Zadaniem akumulatorów hydropneumatycznych jest zakumulowanie energii w postaci hydraulicznej. Teoretyczna wartość energii maksymalnej E kin max pojazdu poruszającego się z prędkością V o i masie m wynosi: E kin max 2 m V 2 o 7.6
109 109 gdzie: - współczynnik mas zredukowanych pojazdu; w obliczeniach przyjęto =1.05. Wartość tę osiąga się przy przepływie energii od kół bez strat i hamowaniu przeprowadzonym praktycznie w nieskończenie krótkim czasie. W rzeczywistości przepływ energii jest obarczony stratami, które zaniedbując powoduje się przewymiarowanie objętości akumulatora przy jego doborze dla hamowania z prędkości V o. Przy hamowaniu występują następujące straty: 1. E a - wynikające z oporów toczenia i powietrza pojazdu, które spowodują w okresie odłączenia napędu opóźnienie zależne od systemu. 2. E b - występuje poślizg między kołami a podłożem w zależności od realizowanego opóźnienia a B. 3. E c - sprawność mechanizmu różnicowego zależna od obrotów i momentu obrotowego. 4. E d - jednostka hydrostatyczna posiada w trybie pracy jako pompa straty hydrauliczno-mechaniczne oraz wolumetryczne zależne od kąta wychylenia tarczy oporowej 2, ciśnienia p i prędkości kątowej E e - przewody między jednostką a akumulatorami dobrane na moc pozorną napędu hydrostatycznego charakteryzują się oporami przepływu. 6. E f - przepływ strumienia jak również podgrzewanie się gazu podczas sprężania prowadzą do strat termodynamicznych przy ładowaniu jak i rozładowaniu akumulatora. Rzeczywista wartość energii gromadzonej w akumulatorze wynosi więc: Eak Ekin max Ea Eb Ec Ed Ee Ef 7.7 Dla pojazdu o masie m=16000[kg], podczas jazdy ze stałym opóźnieniem a B =1.3[m/s 2 ], przedstawione powyżej straty wynoszą odpowiednio: E kinmax (V=80[km/h]) = [Wh] % - E a (10.4%) = [Wh] % - E b ( 3.6%) = 37.17[Wh] % - E c ( 2.0%) = 19.90[Wh] % - E d (20.0%) = [Wh] % - E e ( 5.0%) = 39.01[Wh] % - E f ( 5.0%) = 37.06[Wh] % E ak = [Wh] %
110 110 Znając wartość energii E ak można określić przybliżoną objętość akumulatora V ak z równania: V ak K E ak p p w 2 1 n n n 1 p p w 1 1 n n p w E ak 7.8 Objętość ta w zależności od akumulowanej energii E ak, maksymalnego ciśnienia roboczego p o max =p 2, najniższego ciśnienia roboczego p o min =p 1 jak również ciśnienia wstępnego p w gazu, pozwala zgromadzić dostarczaną energię przy zahamowaniu od każdej prędkości jazdy do postoju, wyrażoną wartością ciśnienia hydrostatycznego: p 0 n n V V m a g f c A V V n 1 n 1 hm g B p X 0 n p 1 1 8V0 ab pw n Dla napędu hydrostatycznego z akumulacją energii istnieją jednoznaczne ograniczenia wobec systemu z siecią o stałym ciśnieniu, a mianowicie: Jeśli ciśnienie robocze p 0 dla zdefiniowanej prędkości jazdy V jest większe niż wynikające z równania 7.9, nie może zostać zakumulowana energia całkowita E ak wg równania 7.7 przy hamowaniu z prędkości V do postoju. Jeśli ciśnienie robocze p 0 dla zdefiniowanej prędkości jazdy V jest niższe niż wynikające z równania 7.9, akumulator nie będzie w pełni naładowany przy hamowaniu z prędkości V do postoju. Dobierając akumulator z różnicy mocy: szczytowej oraz średniej dla danego cyklu przyjmuje się, że będzie on podczas postoju doładowywany, gdyż nie zostanie w pełni napełniony podczas hamowania. Ponadto nie jest możliwy dobór tej samej pojemności akumulatora dla różnych cykli ruchu miejskiego, a tym bardziej dla rzeczywistego ruchu miejskiego o w pełni przypadkowych parametrach energetycznych. Akumulator dobrany dla wartości uśrednionych będzie pracować przy powyższych ograniczeniach. Korzyścią instalacji akumulatora w omawianym układzie napędowym jest redukcja zainstalowanej mocy silnika spalinowego. Redukcję masy akumulatora można osiągnąć dodatkowo przez: wykorzystanie akumulatora jako elementu nośnego pojazdu, wybór innych tworzyw w miejsce stali, szczególnie materiałów włóknistych.
111 111 Rys.7.3. Schemat blokowy układu sterowania hydrobusu
112 112 Na rys.7.3 pokazano schemat układu sterowania w hydrobusie, w którym kierowca realizuje zadanie o prędkości jazdy. Schemat ten powstał w oparciu o modele przedstawione w rozdziałach: 4, 5 i 6 oraz związki zachodzące między pojazdem i otoczeniem. Całość opisuje układ równań różniczkowych, którego rząd sięga wartości dwudziestu kilku, zależnie od stopnia uproszczenia. Świadczy to o złożoności zagadnień i ewentualnych trudnościach przy uruchomieniu. Dla opracowania sygnałów miarodajne są dane o wartościach parametrów w poszczególnych obwodach regulacji i ich stałe czasowe. W regulacji rzeczywistej, niezbędna jest ponadto znajomość przebiegu funkcji sprawności poszczególnych podzespołów układu hydraulicznego, a przede wszystkim jednostek hydrostatycznych w zależności od takich parametrów jak: przyrost ciśnienia p, prędkość kątowa i oraz kąt tarczy oporowej i. Zadaniem głównym dla obliczeń procesu sterowania jest znalezienie właściwych ustawień w podzespołach hydraulicznych oraz w silniku spalinowym dla realizacji poszczególnych sprawności, przy czym optymalizowany jest także wynik sprawności sumarycznej. Szczególne znaczenie w obliczeniach ma kontrolowanie zachowania się bilansu mocy, gdyż w każdym punkcie pracy należy zapewnić, żeby moc wymagana od jednostki wtórnej nie była większa niż moc dostarczana z silnika spalinowego i akumulatora, z uwzględnieniem strat występujących w układzie hydraulicznym. Wydzielonymi zadaniami dla podukładów jest sterowanie, w przypadku: silnika spalinowego - prędkością kątową 1 odpowiadającej za ekologię i ekonomię napędu, pompy - kątem wychylenia tarczy 1 dla utrzymania stałej wartości ciśnienia roboczego w układzie hydraulicznym, jednostki wtórnej - prędkością kątową 2 sprzężonej kinematycznie z prędkością pojazdu. Struktura tych podukładów, własności i ograniczenia jest treścią niniejszej monografii. Ich realizację praktyczną przedstawiono w rozdziałach: 1i 8 oraz poniżej, rys.7.4. Układ sterowania w hydrobusie złożony jest z dwóch niezależnych sterowników: 1. Analogowego, zbudowanego w oparciu o moduły elektroniczne firmy Rexroth. Pełni on rolę układu awaryjnego. 2. Mikroprocesorowego, zrealizowanego w oparciu o sterownik firmy PEP Modular Computers. Wyposażony jest w procesor Motorola 68302FC20, 1MB EPROM, 512 kb DRAM, zegar czasu rzeczywistego, port RS 232 do komunikacji z terminalem oraz port PROFIBUS do pracy w sieci. Sterownik pracuje pod systemem czasu rzeczywistego OS-9. Całość zasilana jest napięciem 24 V DC z zasilacza ZAS, który stanowi jednocześnie izolację galwaniczną i filtr przed zakłóceniami prądowymi w hydrobusie. Rozwiązanie to pozwoliło na dokładne sterowanie prędkością pojazdu zwłaszcza na postoju, gdy V=0. Algorytm działania obydwu sterowników jest podobny. Do napisania programu, dla sterownika mikroprocesorowego, użyto pakietu ISaGraf v Zapewnia on
113 113 możliwość tworzenia programu w języku FBD (Functional Block Diagram) zgodnie z normą IEC1131-3, a samo programowanie polega na używaniu dostępnych bloków funkcyjnych i odpowiednim ich łączeniu. Zgodnie z zaproponowaną koncepcją sterowania, aplikacja składa się z trzech podprogramów: reg _pr - regulatora prędkości jazdy, reg_cis - regulatora ciśnienia reg_obr - regulatora prędkości kątowej silnika spalinowego. Sterowanie analogowe (Rexroth) Sygnały z czujników Sterowanie podstawowe (PEP Modular Computers) Urządzenia wykonawcze Rys.7.4. Schemat blokowy układu sterowania Po doborze nastaw regulatorów przykładowe przebiegi wybranych sygnałów przedstawiono na rys.7.5 i 7.6. Wynika z nich, że: Podczas całego cyklu ładowania prędkość kątowa silnika spalinowego pozostaje stała, jak założono. Widoczna jest współpraca, zgodna z założeniem, regulatorów: prędkości kątowej silnika spalinowego oraz wychylenia tarczy oporowej w pompie podczas ładowania. Proces realizacji prędkości pojazdu przy ruchu do przodu i tyłu cechuje taka sama dynamika. Serwomechanizm pracuje zgodnie z przedstawionymi w monografii założeniami. Hydrobus realizuje podstawowe fazy ruchu. Obecnie prowadzone są badania drogowe napędu ze sterowaniem mikroprocesorowym, które pozwolą na pełną weryfikację działania całego układu. Badania te mogą być rejestrowane w komputerze z jednoczesnym podglądem wybranych wielkości. Wstępne wyniki badań wykazały, że istnieje możliwość osiągnięcia oszczędności paliwa rzędu 8 10% dla przeciętnych warunków ruchu w Łodzi. Układ nie pozwala na uzyskanie większych oszczędności z uwagi na dobór maszyny hydrostatycznej, umieszczonej na moście napędowym autobusu, ze względu na moc szczytową i maksymalną prędkość jazdy. Oszczędność paliwa pochodzi głównie z rekuperacji energii hamowania. Wyniki prac były prezentowane na targach krajowych i zagranicznych, gdzie spotkały się z dużym zainteresowaniem i uzyskały wiele wyróżnień.
114 Prędkość w [m/s] i prąd w [ma] Kąt tarczy oporowej w [stopniach] Wartości sygnałów w [V] c z a s w [s]*2 0 Rys.7.5. Przebieg procesu ładowania akumulatorów w hydrobusie podczas postoju 1 - położenie siłownika w pompie hydrostatycznej, 2 - ciśnienie rzeczywiste, 3 - sygnał na pompie paliwa, 4 - sygnał na serwozaworze, 5 - zadana prędkość kątowa silnika; szybkość próbkowania =20 próbek/s Czas w [s]*50 Rys.7.6. Przykładowy przebieg podstawowych parametrów w układzie regulacji prędkości pojazdu przy skokowym wymuszeniu 50% pedałem gazu do przodu i tyłu. 1 - prąd sterujący na serwozaworze, 2 - kąt wychylenia tarczy oporowej w silniku hydrostatycznym, 3 - prędkość pojazdu
115 PODSTAWOWE PARAMETRY PODZESPOŁÓW ORAZ WYMAGANIA PRZY URUCHAMIANIU UKŁADU HYDRAULICZNEGO 8.1. Dobór silnika hydrostatycznego Podstawowe parametry pojazdu: m p = [kg] - masa pojazdu, f = współczynnik oporu toczenia, c x = współczynnik oporu powietrza, A = 7.4 [m 2 ] - pole powierzchni czołowej, i g = przełożenie przekładni głównej, r d = [m] - promień dynamiczny koła, g = sprawność mostu napędowego, = współczynnik mas zredukowanych pojazdu. a) Zakładając osiągane przyspieszenie pojazdu a = 0.8 [m/s 2 ] otrzymuje się: - Opór bezwładności: Wb mp a N - Opór toczenia: Wt mp g f N - Wymagana siła napędowa: Pn Wb Wt N - Przyjmując sprawność silnika hydrostatycznego sh = 0.82 uzyskuje się wymagany moment obrotowy: Pn rd M Nm i g g sh - Dla ciśnienia roboczego p= < > [MPa] otrzymuje się chłonność jednostkową V g 20 M p cm 3
116 116 Uwzględniając powyższą wartość oraz potrzebę ciągłej zmiany prędkości pojazdu wybrano jednostkę hydrostatyczną A4VSG 250 o maksymalnej chłonności V g = 250[cm 3 ], rys b) W przypadku ruchu na wzniesieniu otrzymuje się: - maksymalna siła napędowa przy ciśnieniu p = 30 [MPa] wynosi: P n i g g sh r d Vg p N - zaniedbując zmianę oporu toczenia przy ruchu po wzniesieniu oraz przyjmując minimalne przyspieszenie a = 0.3 [m/s 2 ] otrzymuje się pochylenie: Wb a mp N p P W W m n t b p 15 7 % Wartość pochylenia p = 7% można uznać za wystarczającą w ruchu miejskim Dobór akumulatorów energii a) ciśnienie robocze w układzie hydraulicznym: dla V g = 250 [cm 3 ] oraz pochylenia drogi p = 3% otrzymuje się: - opór wzniesienia: Ww mp g sin N - wymagana siła napędowa: Pn Wt Ww N - wymagany moment obrotowy silnika hydrostatycznego: M i P r n d g g sh - minimalna wartość ciśnienia roboczego: N 20 M p1 min V g MPa
117 117 Uwzględniając powyższe oraz istniejące akumulatory firmy HYDAC przyjęto p 1 =11 [MPa] oraz wstępne ciśnienie gazu p 0 = p 1-2 = 9 [MPa]. - przyjmując jako pompę roboczą, rys.1.17, jednostkę A4VSG 71 (moc N=60 [kw] przy =150 [rad/s] i p=35 [MPa] oraz moment obrotowy M=395 [Nm]) współpracującą z silnikiem spalinowym RABA-MAN z prędkością kątową odpowiadającą jego maksymalnej sprawności M=150 [rad/s] otrzymuje się: - maksymalną wydajność pompy: 3 3 Qmax Vg nm dm / min dm / s - maksymalną wartość ciśnienia roboczego: p 1max N Q max t MPa Uwzględniając za firmą HYDAC charakterystykę zaworu maksymalnego w akumulatorze przeponowym z p=2 [MPa], można przyjąć maksymalne ciśnienie robocze p 2 =p 1max + p=32 [MPa]. c) objętość akumulatorów energii, rys.8.1: - wymagana prędkość kątowa silnika hydrostatycznego odpowiadająca prędkości pojazdu V=50 [km/h]: V V i r d g rad / s - zakładając liniowy przebieg prędkości autobusu < 0 50 > [km/h] w czasie t p =20 [s] ze stałym przyspieszeniem otrzymuje się wymaganą objętość oleju: V V g V t p dm 3 - ilość oleju pochodząca z pompy A4VSG 71 przy Q max =1.775 [dm 3 /s] to: Vp Qmax t p dm - ilość oleju pochodząca z akumulatora energii: Va V Vp dm 3 3
118 118 - przyjmując dla uproszczenia przemianę adiabatyczną ( =1.4) podczas rozładowania, wtedy minimalną objętość akumulatora energii określa się z wzoru: V ak V 1 a p p 1 0 p p Z katalogu firmy HYDAC przyjęto trzy akumulatory wysokociśnieniowe SB330 o sumarycznej pojemności V 0 = 132 [dm 3 ] ( 2x50 [dm 3 ] + 32 [dm 3 ]), rys d) Traktując olej jako ciecz nieściśliwą można uznać, że akumulatory w obwodzie niskiego ciśnienia muszą być tej samej pojemności co w części wysokociśnieniowej, by bilans masowy całego układu hydraulicznego mógł być zachowany w dowolnej chwili czasu. Wynika stąd wybór akumulatorów SB35 o tej samej pojemności sumarycznej i podobnej konstrukcji, ale o maksymalnym ciśnieniu roboczym p 2 =3.5 [MPa]. Minimalne ciśnienie robocze określa wyrażenie: dm 3 oraz p p 1 V 1 a V p 09. p MPa MPa Akumulatory podlegają przepisom bezpieczeństwa pracy potwierdzone atestami: Dozoru Technicznego w Polsce lub TÜV w Niemczech. W hydrobusie zostały zachowane następujące punkty z przepisów: 1. ciśnienia kontrolowane są przez dwa przetworniki ciśnienie-napięcie typu HM4-20/450 i HM4-20/50. Kierowca może śledzić ich wartość na wskaźnikach umieszczonych w tablicy sterowań. 2. każdy zbiornik ciśnieniowy posiada zawór bezpieczeństwa; jego ustawienie jest zabezpieczone przed zmianą plombą kontrolną. Zawór bezpieczeństwa nie ma możliwości odcięcia. 3. każdy zbiornik posiada łatwo dostępne urządzenie odcinające. Punkty 2 i 3 zrealizowane są w blokach zabezpieczenia i odcinania typu SA20M12T330 zamocowanych bezpośrednio na każdym zbiorniku. 4. zbiorniki ciśnieniowe posiadają atest nr TÜV.SV F i TÜV.SV F.0,44.35.
119 119 Zastosowane akumulatory charakteryzują się absolutną szczelnością i bardzo szybkim zadziałaniem. Azot i ciecz pod ciśnieniem oddzielone są od siebie elastyczną przeponą wykonaną z elastomerów. Akumulator, rys.8.1, składa się ze stalowego zbiornika (1), Rys.8.1. Akumulator hydropneumatyczny króćca łączącego (4), zaworu grzybkowego (5), przepony (2) i zaworu gazowego (3). Przepona, naprężona wstępnie gazem przez zawór gazowy wypełnia butlę stalową i zamyka zawór grzybkowy, który uniemożliwia wyjście przepony oraz chroni ją przed uszkodzeniem. Jeżeli ciśnienie w systemie hydraulicznym przekroczy wstępne
120 120 ciśnienie gazu, to przez zawór grzybkowy płynie ciecz do akumulatora i spręża azot w przeponie. Maksymalny stosunek ciśnień wynosi 1: Dobór zbiornika oleju W zbiorniku olejowym realizowane są następujące zadania: 1. Przyjęcie zapasu oleju. Zbiornik powinien pomieścić całkowitą ilość medium potrzebną w systemie, z uwzględnieniem zmiennej objętości zależnej od odbiornika i cyklu roboczego. W przypadku hydrobusu przyrost objętości oleju w zbiorniku wynika z cyklów roboczych w akumulatorach. I tak dla akumulatora niskociśnieniowego o parametrach pracy: V 0 = 132 [dm 3 ], p 0 = 1.7[MPa], p 1 = 1.9 [MPa], p 2 = 3.5 [MPa] otrzymuje się: stąd dla przemiany adiabatycznej p0 V0 p2 V2 V V [dm V 0 V 2 ; ] [dm 3 ] dla przemiany izotermicznej ' p 0 V0 p2 V2 V ' 2 ' 2 V [dm [dm 3 3 ] ] Dla akumulatora wysokociśnieniowego i parametrów pracy: V 0 = 132 [dm 3 ], p 0 = 9 [MPa], p 1 =11 [MPa], p 2 = 32 [MPa] otrzymuje się odpowiednio: V [dm ] ' V [dm ] V [dm ] ' V [dm ] Sumarycznie przyrosty objętości oleju wynoszą: V ' V Wartość rzeczywista V zawarta będzie w przedziale < > [dm 3 ], przy czym z uwagi na charakter pracy układu napędowego w autobusie miejskim, będą to wartości bliższe przemianie adiabatycznej. 2. Wytrącanie powietrza z cieczy. Oleje mineralne zawierają powietrze w formie rozpuszczalnej, a jego ilość zależy od ciśnienia i temperatury. Z uwagi na to, że powietrze powinno być wytrącane w formie pęcherzyków należy zapewnić jak największą powierzchnię oleju. 3. Osadzanie zanieczyszczeń. Pomimo dostatecznej filtracji olej wraz z wydłużaniem się okresu eksploatacji nasyca się cząsteczkami zanieczyszczeń lub produktami
121 121 starzenia, które muszą mieć możliwość osadzania się na dnie zbiornika. Stąd kształt i rozmieszczenie przewodów: ssania oraz powrotu nie powinny wpływać wzajemnie na siebie. W przyjętym rozwiązaniu są maksymalnie oddalone, osobno w komorach ssania i powrotu. W dużych zbiornikach, powyżej 1000 [dm 3 ], lub przy szczególnie silnych ruchach oleju wstawia się ściany podziałowe; w omawianym przypadku dwie ściany. Powodują one przestrzenny podział zbiornika na komory: ssania, środkową i powrotu. 4. Usuwanie zanieczyszczeń. Zbiornik wyposażono w trzy pokrywy do czyszczenia, gdyż są trzy komory. Otwory o 200 są na tyle duże, że wszystkie powierzchnie i naroża w zbiorniku są łatwo dostępne. W najniższym miejscu dna zbiornika umieszczono korek spustowy. Dla czyszczenia i lepszego chłodzenia zbiornik posiada prześwit nad podłogą autobusu ok. 150 [mm], który umożliwia dobrą cyrkulację powietrza. 5. Kontrola poziomu oleju. Zastosowano dwa wskaźniki poziomu oleju: elektryczny - do ciągłej obserwacji przez kierowcę oraz typu bagnet do kontroli okresowej. 6. Odpowietrzanie oleju. Do odpowietrzania zbiornika i równoczesnego oczyszczania zasysanego powietrza służy powietrzny filtr wlewowy o dokładności filtrowania 10 [ m]. 7. Utrzymanie temperatury oleju w zakresie roboczym [ O C]. Zastosowano regulator temperatury oleju załączający dwa wentylatory, umieszczone na chłodnicy firmy BEHR o następujących parametrach: moc chłodzenia 11 [kw] wydajność oleju 50 [dm 3 /min] temperatura oleju wejściowego 60 [ O C] temperatura powietrza wejściowego 30 [ O C] ciśnienie robocze [MPa] Wielkość zbiornika można określić następująco: Sposób I Wydajności pompy; normalnie 3 5 Q. W układzie zasilania zastosowano pompę zębatą G3/26 o wydajności jednostkowej V g = 25.9 [cm 3 /obr], połączoną ze źródłem pierwotnym hydrobusu tj. silnikiem wysokoprężnym RABA-MAN D 2156 HMG4 o maksymalnej mocy N = 142 [kw] przy n N = 210 [rad/s] oraz maksymalnym momencie M=696 [Nm] przy n M =150 [rad/s]. Wydajność pompy zasilającej będzie więc Q= [cm 3 /min]; stąd V Q =3 5 Q = [dm 3 ]. Poduszka powietrza powinna zajmować 10 15% V Q. Całkowita objętość zbiornika będzie więc V Q = [dm 3 ].
122 122 Sposób II Dla hydraulicznych układów maszyn samojezdnych zaleca się obliczać pojemność V Q zbiornika w [dm 3 ] z wyrażenia: Q V Q V 3 5 gdzie: Q - wartość liczbowa łącznej wydajności pomp, V - objętość siłowników jednostronnego działania; w przypadku hydrobusu przyrost objętości w akumulatorach energii. Należy też uwzględnić 10 15% na przestrzeń powietrzną. Przyjmując: V = 151 [dm 3 ], Q = 54.4 [cm 3 /min] oraz współczynniki najmniej korzystne, otrzymuje się: V Q dm Na zbiornik oleju przystosowano zbiornik paliwa o wymiarach 550x1260x410[mm] i pojemności ok. 280 [dm 3 ] Dobór oleju Podstawowym kryterium doboru oleju do hydrostatycznych układów napędowych jest jego lepkość oraz charakterystyka lepkościowo - temperaturowa. Lepkość oleju mającego pracować w określonym zakresie temperatur i przy określonym ciśnieniu roboczym należy dobierać tak, aby suma strat hydraulicznych i objętościowych była jak najmniejsza. Punktem wyjścia do analizy jest znajomość temperatur granicznych oraz zakresu temperatur dopuszczalnych w czasie normalnej eksploatacji. Najkorzystniejsza lepkość eksploatacyjna mieści się w zakresie [mm 2 /s], rys.8.2 [44], a zakreskowane pole wyznacza obszar optymalny. W górnej części tego zakresu, [mm 2 /s], występują dobre warunki smarowania łożysk tocznych, dzięki czemu uzyskuje się odpowiednio dużą trwałość. Przykładowo, smarowanie łożysk tocznych olejem o lepkości = 36 [mm 2 /s] zwiększa ok. 2.3-krotnie ich trwałość w porównaniu z = 10 [mm 2 /s]. W doborze oleju należy uwzględnić właściwość, że przy wysokich ciśnieniach lepkość wzrasta, np. dwukrotnie przy 40 [MPa]. Podczas eksploatacji trzeba zwrócić uwagę na to, aby: Pierwszą wymianę cieczy roboczej dokonać po godzinach. Każde 10 [ O C] wzrostu temperatury powyżej 80 [ O C] powoduje zmniejszenie trwałości użytkowej o połowę. Należy unikać takiego wzrostu temperatury.
123 w układach o krotności obiegu co najwyżej 1 [dm 3 /min] oraz przy dobrym odpowietrzaniu można osiągnąć trwałość użytkową 4000 [godz] odniesioną do ciśnienia 20 [MPa]. Rys.8.2. Zakresy lepkości eksploatacyjnej olejów A - warunki arktyczne, W - warunki zimowe w Europie Środkowej, S - warunki letnie w Europie Środkowej, T - warunki tropikalne lub pomieszczenia z dużym wytwarzaniem ciepła, U - warunki z nadmiernym wytwarzaniem ciepła. Zgodnie z wymaganiami DIN jako ciecze robocze dla przekładni hydrostatycznych wskazane są oleje mineralne o klasie lepkości VG 46, VG 68 wg ISO Z dostępnych na rynku krajowym olejów wymagania powyższe spełnia SHELL TELLUS 68 o następujących danych fizyko-chemicznych: - stopień lepkości 68 - temperatura zapłonu 219 [ O C] - temperatura krzepnięcia - 30 [ O C] - lepkość kinematyczna: w 40 [ O C] 68 [mm 2 /s] w 100 [ O C] 8 [mm 2 /s] - wskaźnik lepkości gęstość przy 15 [ O C] [kg/dm 3 ]. Olej ten należy do grupy o wysokim wskaźniku lepkości, przeznaczonej specjalnie do stosowania w hydraulicznych systemach przenoszenia mocy i sterowania, które są narażone na działanie bardzo wysokich temperatur. Ponadto cechuje go: - bardzo mała zmiana lepkości względem temperatury, - wysoka odporność na ścinanie i poprawna praca w pompach o gładziach stal/stal
124 124 w szerokim zakresie szybkości, - odporność na korozję FILTROWANIE W UKŁADZIE HYDRAULICZNYM HYDROBUSU Poniższa tabela przedstawia zalecaną absolutną dokładność filtrowania dla różnych elementów hydraulicznych [44]. Element hydrauliczny Pompa zębata Siłownik Zawór odcinający Zawór maksymalny Zawór dławiący Pompy tłoczkowe Pompy łopatkowe Regulator przepływu Zawory proporcjonalne Serwozawory Serwosiłowniki Klasa czystości wg NAS Zalecana absolutna dokładność filtrowania w[ m] Serwozawory oraz zawory proporcjonalne są najbardziej wrażliwymi na zanieczyszczenia elementami układu hydraulicznego. Z tego względu wymuszają one ogólną klasę czystości oleju, a tym samym wymagają odpowiedniej dokładności filtrowania dla całego układu. Od układów hydraulicznych z serwozaworami i zaworami proporcjonalnymi wymaga się większej opłacalności ekonomicznej, mniejszej podatności na zakłócenia, większej trwałości oraz łatwości wykonywania obsługi technicznej. W związku z tym producenci zaworów oraz użytkownicy układów żądają dokładniejszego filtrowania cieczy roboczej realizowanego m.in. przez: - serwozawory z wewnętrznym sterowaniem wstępnym należy bezpośrednio przed zaworem zabezpieczyć filtrem ciśnieniowym umieszczonym w przewodzie tłocznym P bez zaworu bocznikowego. Nominalna dokładność filtrowania 10 [ m], (klasa czystości 5 wg NAS 1638), - serwozawory z zewnętrznym sterowaniem wstępnym należy bezpośrednio przed zaworem zabezpieczyć filtrem ciśnieniowym umieszczanym w przewodzie X bez zaworu bocznikowego. Nominalna dokładność filtrowania 10 [ m] (klasa czystości 5 wg NAS 1638). W takim przypadku zaleca się oczyszczanie oleju w całym układzie hydraulicznym przez dodatkowy filtr o nominalnej dokładności filtrowania 10 [ m],
125 125 - dopuszczalna różnica ciśnień w filtrach ciśnieniowych nie powinna być większa niż ciśnienie robocze, - zaleca się stosowanie filtrów ze wskaźnikiem zanieczyszczenia przegrody filtrującej, - przed uruchomieniem serwozaworu należy przepłukać wszystkie przewody dopływowe i odpływowe, a ilość oleju znajdująca się w układzie powinna w procesie płukania przechodzić przez filtr co najmniej krotnie. Wynika stąd orientacyjny czas płukania: - gdzie: t V Q 2.5 t czas płukania w [godz] V objętość zbiornika w [dm 3 ], Q wydajność pompy w [dm 3 /min]. Dla V = 280 [dm 3 ] i Q = 50 [dm 3 /min] otrzymuje się czas płukania t = [godz], przypadający na jeden zawór. Płukanie układu przeprowadza się ponadto w następujących przypadkach: - gdy ilość oleju uzupełniającego przekracza 10% pojemności zbiornika, - po otwarciu przewodów połączeniowych, z dowolnego powodu, czas trwania procesu płukania powinien wynosić ok. 30 minut. W obwodzie hydraulicznym hydrobusu zastosowano: - dwa filtry DF BH/HC zabezpieczające serwozawory, - dwa filtry DF BH/HC zabezpieczające blok zaworowy, - filtr FR BN/HC w przewodzie spływowym do zbiornika oleju HYDRAULICZNE ELEMENTY LOGICZNE STERUJĄCE PRZEPŁYWEM CIECZY Do sterowania przepływem oleju między pompami, silnikiem hydrostatycznym i akumulatorami hydropneumatycznymi, rys.1.17, użyto zawory dwudrogowe tzw. wkłady lub hydrauliczne elementy logiczne, które składają się z: pokrywy 4 z otworami sterującymi, wkładu złożonego z tulei 1 z powierzchnią przylegania (gniazdem) oraz grzybka 2, dociskanego sprężyną 3 do gniazda, rys.8.3 [65]. Pod względem konstrukcji są w zasadzie zaworami zwrotnymi, a jedyna różnica polega na tym, że olej sterujący w odmienny sposób doprowadzany jest dla zamykania zaworu.

126 126 Zawór taki może zezwalać na przepływ od przyłącza A do przyłącza B lub odwrotnie i odpowiednio do impulsu sterującego jest dla danego kierunku otworzony lub zamknięty. Położenie grzybka zależy jedynie od ciśnień p A, p B i p x. Jeżeli na powierzchni A 3 nie działa ciśnienie (połączenie X), to zawór otwiera się dla obu kierunków przepływu wtedy, gdy siła ciśnienia działająca na odpowiednie powierzchnie A 1 lub A 2 jest większa od siły sprężyny. Jeżeli na powierzchni A 3 działa ciśnienie sterowania, to dociska ono grzybek do gniazda, niezależnie od siły sprężyny. Przez zmianę wykonania pokrywy i otworów sterujących w korpusie istnieje wiele możliwości dla sterowania, tj. wpływania na układ sił na grzybku. Sterowanie można realizować od strony: przyłącza A, przyłącza B, przyłącza A i B lub z zewnątrz przez zawór przełączający. Za pomocą dodatkowych elementów można uzyskać ponadto inne funkcje jak np. ograniczenie ciśnienia, dławienie lub przez kombinacje kilku elementów, wielodrogowe układy sterowania. Rys.8.3. Hydrauliczny element logiczny oraz schemat wg DIN
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Instrukcja do ćwiczeń laboratoryjnych. Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing
 Instrukcja do ćwiczeń laboratoryjnych Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing Wstęp teoretyczny Poprzednie ćwiczenia poświęcone były sterowaniom dławieniowym. Do realizacji
Instrukcja do ćwiczeń laboratoryjnych Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing Wstęp teoretyczny Poprzednie ćwiczenia poświęcone były sterowaniom dławieniowym. Do realizacji
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
TENDENCJE ROZWOJOWE W DZIEDZINIE ELEMENTÓW I SYSTEMÓW NAPĘDU HYDRAULICZNEGO
 Rozdział 1 TENDENCJE ROZWOJOWE W DZIEDZINIE ELEMENTÓW I SYSTEMÓW NAPĘDU HYDRAULICZNEGO 1.1. Uwagi ogólne W ostatnich latach zaznaczył się szybki rozwój i szeroki obszar zastosowań napędów hydraulicznych.
Rozdział 1 TENDENCJE ROZWOJOWE W DZIEDZINIE ELEMENTÓW I SYSTEMÓW NAPĘDU HYDRAULICZNEGO 1.1. Uwagi ogólne W ostatnich latach zaznaczył się szybki rozwój i szeroki obszar zastosowań napędów hydraulicznych.
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 9 Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing Opracowanie: M. Stosiak, K. Towarnicki Wrocław 2016 Wstęp teoretyczny
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 9 Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing Opracowanie: M. Stosiak, K. Towarnicki Wrocław 2016 Wstęp teoretyczny
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Ćwiczenie Nr 2. Temat: Zaprojektowanie i praktyczna realizacja prostych hydraulicznych układów sterujących i napędów
 Ćwiczenie Nr 2 Temat: Zaprojektowanie i praktyczna realizacja prostych hydraulicznych układów sterujących i napędów 1. Wprowadzenie Sterowanie prędkością tłoczyska siłownika lub wału silnika hydraulicznego
Ćwiczenie Nr 2 Temat: Zaprojektowanie i praktyczna realizacja prostych hydraulicznych układów sterujących i napędów 1. Wprowadzenie Sterowanie prędkością tłoczyska siłownika lub wału silnika hydraulicznego
Wprowadzenie. - Napęd pneumatyczny. - Sterowanie pneumatyczne
 Wprowadzenie Pneumatyka - dziedzina nauki i techniki zajmująca się prawami rządzącymi przepływem sprężonego powietrza; w powszechnym rozumieniu także technika napędu i sterowania pneumatycznego. Zastosowanie
Wprowadzenie Pneumatyka - dziedzina nauki i techniki zajmująca się prawami rządzącymi przepływem sprężonego powietrza; w powszechnym rozumieniu także technika napędu i sterowania pneumatycznego. Zastosowanie
Wprowadzenie. Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego.
 Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Seria Jubileuszowa. Rozwiązania informatyczne. Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości. oszczędność energii. ochrona środowiska
 Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Urządzenia nastawcze
 POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Urządzenia nastawcze Laboratorium automatyki (A-V) Opracował: dr inż. Leszek Remiorz Sprawdził:
POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Urządzenia nastawcze Laboratorium automatyki (A-V) Opracował: dr inż. Leszek Remiorz Sprawdził:
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
Regulacja dwupołożeniowa (dwustawna)
") Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Regulacja dwupołożeniowa (dwustawna) I. Wprowadzenie Regulacja dwustawna (dwupołożeniowa) jest często stosowaną metodą regulacji temperatury w urządzeniach grzejnictwa elektrycznego. Polega ona na cyklicznym
Ćwiczenie 2a. Pomiar napięcia z izolacją galwaniczną Doświadczalne badania charakterystyk układów pomiarowych CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI
 1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
Zajęcia laboratoryjne Napęd Hydrauliczny
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 11 Sterowanie objętościowe konwencjonalne Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 11 Sterowanie objętościowe konwencjonalne Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1. Zbigniew Krzemiński, MMB Drives sp. z o.o.
 Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym
 1 Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wentylatory są niezbędnym elementem systemów wentylacji
1 Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wentylatory są niezbędnym elementem systemów wentylacji
Układy zasilania samochodowych silników spalinowych. Bartosz Ponczek AiR W10
 Układy zasilania samochodowych silników spalinowych Bartosz Ponczek AiR W10 ECU (Engine Control Unit) Urządzenie elektroniczne zarządzające systemem zasilania silnika. Na podstawie informacji pobieranych
Układy zasilania samochodowych silników spalinowych Bartosz Ponczek AiR W10 ECU (Engine Control Unit) Urządzenie elektroniczne zarządzające systemem zasilania silnika. Na podstawie informacji pobieranych
PROCEDURA DOBORU POMP DLA PRZEMYSŁU CUKROWNICZEGO
 PROCEDURA DOBORU POMP DLA PRZEMYSŁU CUKROWNICZEGO Wskazujemy podstawowe wymagania jakie muszą być spełnione dla prawidłowego doboru pompy, w tym: dobór układu konstrukcyjnego pompy, parametry pompowanego
PROCEDURA DOBORU POMP DLA PRZEMYSŁU CUKROWNICZEGO Wskazujemy podstawowe wymagania jakie muszą być spełnione dla prawidłowego doboru pompy, w tym: dobór układu konstrukcyjnego pompy, parametry pompowanego
Silnik AHU. Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań)
") Silnik AHU Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika. 37
Silnik AHU Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika. 37
Temat: Układy pneumatyczno - hydrauliczne
 Copyright by: Krzysztof Serafin. Brzesko 2007 Na podstawie skryptu 1220 AGH Temat: Układy pneumatyczno - hydrauliczne 1. Siłownik z zabudowanym blokiem sterującym Ten ruch wahadłowy tłoka siłownika jest
Copyright by: Krzysztof Serafin. Brzesko 2007 Na podstawie skryptu 1220 AGH Temat: Układy pneumatyczno - hydrauliczne 1. Siłownik z zabudowanym blokiem sterującym Ten ruch wahadłowy tłoka siłownika jest
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Silnik AFB AKN. Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań)
") Silnik Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika. 30 do
Silnik Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C. Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika. 30 do
PL B1. Sposób i układ sterowania przemiennika częstotliwości z falownikiem prądu zasilającego silnik indukcyjny
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
YZ Wskazówka: pola wskazań, które nie są pokazywane lub mają podwójne zastosowanie nie są wymienione w poszczególnych grupach wskazań!
 Odczyt bloku wartości mierzonych Audi R8 2008> - Ręczna zautomatyzowana skrzynia biegów 086 Mogą być pokazane następujące bloki wartości mierzonych: YZ Wskazówka: pola wskazań, które nie są pokazywane
Odczyt bloku wartości mierzonych Audi R8 2008> - Ręczna zautomatyzowana skrzynia biegów 086 Mogą być pokazane następujące bloki wartości mierzonych: YZ Wskazówka: pola wskazań, które nie są pokazywane
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 1 Charakterystyka zasilacza hydraulicznego Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 1 Charakterystyka zasilacza hydraulicznego Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Pomiar rezystancji metodą techniczną
 Pomiar rezystancji metodą techniczną Cel ćwiczenia. Poznanie metod pomiarów rezystancji liniowych, optymalizowania warunków pomiaru oraz zasad obliczania błędów pomiarowych. Zagadnienia teoretyczne. Definicja
Pomiar rezystancji metodą techniczną Cel ćwiczenia. Poznanie metod pomiarów rezystancji liniowych, optymalizowania warunków pomiaru oraz zasad obliczania błędów pomiarowych. Zagadnienia teoretyczne. Definicja
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 6!!!
 Laboratorium nr2 Temat: Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie pośrednie stosuje się do sterowania elementami wykonawczymi (siłownikami, silnikami)
Laboratorium nr2 Temat: Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie pośrednie stosuje się do sterowania elementami wykonawczymi (siłownikami, silnikami)
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Zestawy pompowe PRZEZNACZENIE ZASTOSOWANIE OBSZAR UŻYTKOWANIA KONCEPCJA BUDOWY ZALETY
 PRZEZNACZENIE Zestawy pompowe typu z przetwornicą częstotliwości, przeznaczone są do tłoczenia wody czystej nieagresywnej chemicznie o ph=6-8. Wykorzystywane do podwyższania ciśnienia w instalacjach. Zasilane
PRZEZNACZENIE Zestawy pompowe typu z przetwornicą częstotliwości, przeznaczone są do tłoczenia wody czystej nieagresywnej chemicznie o ph=6-8. Wykorzystywane do podwyższania ciśnienia w instalacjach. Zasilane
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Próby ruchowe dźwigu osobowego
 INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
INSTYTUT KONSTRUKCJI MASZYN KIERUNEK: TRANSPORT PRZEDMIOT: SYSTEMY I URZĄDZENIA TRANSPORTU BLISKIEGO Laboratorium Próby ruchowe dźwigu osobowego Functional research of hydraulic elevators Cel i zakres
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO
 TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO
 Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
Ćwiczenie 11 BADANIE PRZERZUTNIKÓW ASTABILNEGO, MONOSTABILNEGO I BISTABILNEGO 11.1 Cel ćwiczenia Celem ćwiczenia jest poznanie rodzajów, budowy i właściwości przerzutników astabilnych, monostabilnych oraz
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Charakterystyki prędkościowe silników spalinowych
 Wydział Samochodów i Maszyn Roboczych Instytut Pojazdów LABORATORIUM TEORII SILNIKÓW CIEPLNYCH Charakterystyki prędkościowe silników spalinowych Opracowanie Dr inż. Ewa Fudalej-Kostrzewa Warszawa 2015
Wydział Samochodów i Maszyn Roboczych Instytut Pojazdów LABORATORIUM TEORII SILNIKÓW CIEPLNYCH Charakterystyki prędkościowe silników spalinowych Opracowanie Dr inż. Ewa Fudalej-Kostrzewa Warszawa 2015
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Ćwiczenie 1. Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym.
 Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
UKŁAD AUTOMATYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU STAŁEGO KONFIGUROWANY GRAFICZNIE
 UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
9.Tylko jedna odpowiedź jest poprawna. 10. Wybierz właściwą odpowiedź i zamaluj kratkę z odpowiadającą jej literą np., gdy wybrałeś odpowiedź A :
 6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 5 Zastosowanie zaworu zwrotnego sterowanego w układach hydraulicznych maszyn roboczych Opracowanie: P. Jędraszczyk, Z. Kudżma, P. Osiński,
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 5 Zastosowanie zaworu zwrotnego sterowanego w układach hydraulicznych maszyn roboczych Opracowanie: P. Jędraszczyk, Z. Kudżma, P. Osiński,
Mikrosilniki prądu stałego cz. 2
 Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
Jakub Wierciak Mikrosilniki cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Mikrosilnik z komutacją bezzestykową 1 - wałek,
IMPULSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM
 Instrukcja do ćwiczenia laboratoryjnego. IMPSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM Przekształtnik impulsowy z tranzystorem szeregowym słuŝy do przetwarzania energii prądu jednokierunkowego
Instrukcja do ćwiczenia laboratoryjnego. IMPSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM Przekształtnik impulsowy z tranzystorem szeregowym słuŝy do przetwarzania energii prądu jednokierunkowego
Odczytywanie bloku wartości mierzonych Audi A6 1998> - multitronic 01J od modelu roku 1998
 Odczytywanie bloku wartości mierzonych Audi A6 1998> - multitronic 01J od modelu roku 1998 Mogą być wskazywane następujące bloki wartości mierzonych: Grupa wskazań 001: Pole wskazań 1: przełącznik świateł
Odczytywanie bloku wartości mierzonych Audi A6 1998> - multitronic 01J od modelu roku 1998 Mogą być wskazywane następujące bloki wartości mierzonych: Grupa wskazań 001: Pole wskazań 1: przełącznik świateł
Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Katedra Elektroniki
 Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Na podstawie instrukcji Wtórniki Napięcia,, Laboratorium układów Elektronicznych Opis badanych układów Spis Treści 1. CEL ĆWICZENIA... 2 2.
Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Na podstawie instrukcji Wtórniki Napięcia,, Laboratorium układów Elektronicznych Opis badanych układów Spis Treści 1. CEL ĆWICZENIA... 2 2.
Silnik AKU. Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C). Numer 0 (dziesiętne wartości wskazań)
. Numer 0 (dziesiętne wartości wskazań)") Silnik AKU Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C). Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika.
Silnik AKU Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C). Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości 1. Obroty silnika.
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS..
 Strona 1/11 Układ ENI-EBUS/URSUS Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS.. Układ ten umożliwia: napędzanie i hamowanie
Strona 1/11 Układ ENI-EBUS/URSUS Układ ENI-EBUS/URSUS stanowi kompletny zespół urządzeń napędu i sterowania przeznaczony do autobusu EKOVOLT produkcji firmy URSUS.. Układ ten umożliwia: napędzanie i hamowanie
Podział regulatorów: I. Regulatory elektroniczne: II. Regulatory bezpośredniego działania: III. Regulatory dwustawne i trójstawne:
 REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
REGULATORY CK68 Nie można wyświetlić połączonego obrazu. Plik mógł zostać przeniesiony lub usunięty albo zmieniono jego nazwę. Sprawdź, czy łącze wskazuje poprawny plik i lokalizację. Zadania regulatorów
Zawory liniowe. Zawór zwrotny bliźniaczy sterowany. Zawór zwrotny bliźniaczy sterowany. Opis:
 Zawór zwrotny bliźniaczy sterowany Zawory zwrotne bliźniacze sterowane służą do blokowania odbiornika w obu kierunkach. Przepływ jest swobodny w jednym kierunku a w drugim jest kontrolowany ciśnieniem
Zawór zwrotny bliźniaczy sterowany Zawory zwrotne bliźniacze sterowane służą do blokowania odbiornika w obu kierunkach. Przepływ jest swobodny w jednym kierunku a w drugim jest kontrolowany ciśnieniem
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Silniki prądu stałego z komutacją bezstykową (elektroniczną)
") Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki AJM ARL ATD AUY
 Silniki AJM AUY Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C). Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości. Obroty silnika.
Silniki AJM AUY Jałowy bieg (ciepły silnik, temperatura płynu chłodzącego nie niższa niż 80 C). Numer 0 (dziesiętne wartości wskazań) Numer bloku Opis Wartość wymagana Odpowiada wartości. Obroty silnika.
Maszyna indukcyjna jest prądnicą, jeżeli prędkość wirnika jest większa od prędkości synchronicznej, czyli n > n 1 (s < 0).
.") Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
Temat: Wielkości charakteryzujące pracę silnika indukcyjnego. 1. Praca silnikowa. Maszyna indukcyjna jest silnikiem przy prędkościach 0 < n < n 1, co odpowiada zakresowi poślizgów 1 > s > 0. Moc pobierana
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1. (54) Sposób sterowania zespołem pomp BUP 02/
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1. (54) Sposób sterowania zespołem pomp BUP 02/") RZECZPOSPOLITA PO LSK A Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 180536 (13) B1 (21 ) Numer zgłoszenia: 315275 (22) Data zgłoszenia: 12.07.1996 (51) IntCl7 F04B 49/02
RZECZPOSPOLITA PO LSK A Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 180536 (13) B1 (21 ) Numer zgłoszenia: 315275 (22) Data zgłoszenia: 12.07.1996 (51) IntCl7 F04B 49/02
Temat: Systemy do precyzyjnej regulacji temperatury w obiektach chłodzonych o dużej i małej pojemności cieplnej.
 Temat: Systemy do precyzyjnej regulacji temperatury w obiektach chłodzonych o dużej i małej pojemności cieplnej. Paweł Paszkowski SUChiKl Semestr IX Rok akademicki 2010/2011 SPIS TREŚCI Regulacja temperatury
Temat: Systemy do precyzyjnej regulacji temperatury w obiektach chłodzonych o dużej i małej pojemności cieplnej. Paweł Paszkowski SUChiKl Semestr IX Rok akademicki 2010/2011 SPIS TREŚCI Regulacja temperatury
Zasady doboru mikrosilników prądu stałego
 Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
Audi A > - automatyczna skrzynia biegów 09L Audi A4 Cabriolet 2003> - automatyczna skrzynia biegów 09L
 Odczyt bloku wartości mierzonych Audi A4 2001 > - automatyczna skrzynia biegów 09L Audi A4 Cabriolet 2003> - automatyczna skrzynia biegów 09L Mogą być wskazywane następujące bloki wartości mierzonych:
Odczyt bloku wartości mierzonych Audi A4 2001 > - automatyczna skrzynia biegów 09L Audi A4 Cabriolet 2003> - automatyczna skrzynia biegów 09L Mogą być wskazywane następujące bloki wartości mierzonych:
Przetworniki ciśnienia do zastosowań ogólnych typu MBS 1700 i MBS 1750
 Karta katalogowa Przetworniki ciśnienia do zastosowań ogólnych typu MBS 1700 i MBS 1750 Kompaktowe przetworniki ciśnienia typu MBS 1700 i MBS 1750 przeznaczone są do pracy w większości typowych aplikacji.
Karta katalogowa Przetworniki ciśnienia do zastosowań ogólnych typu MBS 1700 i MBS 1750 Kompaktowe przetworniki ciśnienia typu MBS 1700 i MBS 1750 przeznaczone są do pracy w większości typowych aplikacji.
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
STANOWISKO DO SMAROWANIA WĘZŁÓW TRĄCYCH W ŚRODKACH TRANSPORTOWYCH Typ SA 1 i SA1G
 STANOWISKO DO SMAROWANIA WĘZŁÓW TRĄCYCH W ŚRODKACH TRANSPORTOWYCH Typ SA 1 i SA1G Stanowisko do smarowania SA 1 Zastosowanie Stanowisko jest przeznaczone do smarowania węzłów trących w podwoziach pojazdów
STANOWISKO DO SMAROWANIA WĘZŁÓW TRĄCYCH W ŚRODKACH TRANSPORTOWYCH Typ SA 1 i SA1G Stanowisko do smarowania SA 1 Zastosowanie Stanowisko jest przeznaczone do smarowania węzłów trących w podwoziach pojazdów
Praca dyplomowa inżynierska
 Praca dyplomowa inżynierska PROWADZĄCY PRACĘ: prof. dr hab. inż. Edward Palczak, prof. zw.pwr. AUTOR: Maciej Durko Wrocław 2010 Temat pracy dyplomowej inż. Projekt wstępny rozdzielacza serwomechanizmu
Praca dyplomowa inżynierska PROWADZĄCY PRACĘ: prof. dr hab. inż. Edward Palczak, prof. zw.pwr. AUTOR: Maciej Durko Wrocław 2010 Temat pracy dyplomowej inż. Projekt wstępny rozdzielacza serwomechanizmu
STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ
 Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
Postępy Nauki i Techniki nr 12, 2012 Jakub Lisiecki *, Paweł Rosa *, Szymon Lisiecki * STANOWISKOWE BADANIE ZESPOŁU PRZENIESIENIA NAPĘDU NA PRZYKŁADZIE WIELOSTOPNIOWEJ PRZEKŁADNI ZĘBATEJ Streszczenie.
Liniowe układy scalone w technice cyfrowej
 Liniowe układy scalone w technice cyfrowej Wykład 6 Zastosowania wzmacniaczy operacyjnych: konwertery prąd-napięcie i napięcie-prąd, źródła prądowe i napięciowe, przesuwnik fazowy Konwerter prąd-napięcie
Liniowe układy scalone w technice cyfrowej Wykład 6 Zastosowania wzmacniaczy operacyjnych: konwertery prąd-napięcie i napięcie-prąd, źródła prądowe i napięciowe, przesuwnik fazowy Konwerter prąd-napięcie
Dlaczego pompa powinna być "inteligentna"?
 Dlaczego pompa powinna być "inteligentna"? W ciepłowniczych i ziębniczych układach pompowych przetłaczanie cieczy ma na celu transport ciepła, a nie, jak w pozostałych układach, transport masy. Dobrym
Dlaczego pompa powinna być "inteligentna"? W ciepłowniczych i ziębniczych układach pompowych przetłaczanie cieczy ma na celu transport ciepła, a nie, jak w pozostałych układach, transport masy. Dobrym
WSTĘP DO ELEKTRONIKI
 WSTĘP DO ELEKTRONIKI Część VI Sprzężenie zwrotne Wzmacniacz operacyjny Wzmacniacz operacyjny w układach z ujemnym i dodatnim sprzężeniem zwrotnym Janusz Brzychczyk IF UJ Sprzężenie zwrotne Sprzężeniem
WSTĘP DO ELEKTRONIKI Część VI Sprzężenie zwrotne Wzmacniacz operacyjny Wzmacniacz operacyjny w układach z ujemnym i dodatnim sprzężeniem zwrotnym Janusz Brzychczyk IF UJ Sprzężenie zwrotne Sprzężeniem
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Instrukcja do ćwiczeń laboratoryjnych. Układy rewersyjne
 Instrukcja do ćwiczeń laboratoryjnych Układy rewersyjne Wstęp Celem ćwiczenia jest budowa różnych układów hydraulicznych pełniących zróżnicowane funkcje. Studenci po odbyciu ćwiczenia powinni umieć porównać
Instrukcja do ćwiczeń laboratoryjnych Układy rewersyjne Wstęp Celem ćwiczenia jest budowa różnych układów hydraulicznych pełniących zróżnicowane funkcje. Studenci po odbyciu ćwiczenia powinni umieć porównać
Przetworniki ciśnienia do zastosowań ogólnych typu MBS 1700 i MBS 1750
 MAKING MODERN LIVING POSSIBLE Karta katalogowa Przetworniki ciśnienia do zastosowań ogólnych typu MBS 1700 i MBS 1750 Kompaktowe przetworniki ciśnienia typu MBS 1700 i MBS 1750 przeznaczone są do pracy
MAKING MODERN LIVING POSSIBLE Karta katalogowa Przetworniki ciśnienia do zastosowań ogólnych typu MBS 1700 i MBS 1750 Kompaktowe przetworniki ciśnienia typu MBS 1700 i MBS 1750 przeznaczone są do pracy
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia III. Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną
 Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Hamulce elektromagnetyczne. EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie
 Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Zawór stałej mocy LV 06 Elementy sterowania dla typoszeregu 5 i typoszeregu E/C
 RL 95546/05.87 Elementy sterowania dla typoszeregu 5 i typoszeregu E/C RL 95546/05.87 Zastąpiono 01.82 Klucz typowielkości Oznaczenia Zawór stałej mocy Wielkość nominalna Wielkość nominalna Wykonanie 1
RL 95546/05.87 Elementy sterowania dla typoszeregu 5 i typoszeregu E/C RL 95546/05.87 Zastąpiono 01.82 Klucz typowielkości Oznaczenia Zawór stałej mocy Wielkość nominalna Wielkość nominalna Wykonanie 1
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe
 Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
Audi A8 od 2003 > Automatyczna skrzynia biegów 09L od modelu roku 2003
 Odczytywanie bloku wartości mierzonych Audi A8 od 2003 > Automatyczna skrzynia biegów 09L od modelu roku 2003 Mogą być wskazywane następujące bloki wartości mierzonych: Grupa wskazań 001: Pole wskazań
Odczytywanie bloku wartości mierzonych Audi A8 od 2003 > Automatyczna skrzynia biegów 09L od modelu roku 2003 Mogą być wskazywane następujące bloki wartości mierzonych: Grupa wskazań 001: Pole wskazań
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Opracował: mgr inż. Marcin Wieczorek
 Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Opracował: mgr inż. Marcin Wieczorek Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M obc o moment strat jałowych M 0 czyli: wirnik będzie wirował z prędkością
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 10 Badania porównawcze układów sterowania i regulacji prędkością odbiornika hydraulicznego Opracowanie: H. Kuczwara, Z. Kudźma, P. Osiński,
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 10 Badania porównawcze układów sterowania i regulacji prędkością odbiornika hydraulicznego Opracowanie: H. Kuczwara, Z. Kudźma, P. Osiński,
Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu
 Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu Przedmiot: Pomiary Elektryczne Materiały dydaktyczne: Pomiar i regulacja prądu i napięcia zmiennego Zebrał i opracował: mgr inż. Marcin Jabłoński
Zespół Szkół Technicznych im. J. i J. Śniadeckich w Grudziądzu Przedmiot: Pomiary Elektryczne Materiały dydaktyczne: Pomiar i regulacja prądu i napięcia zmiennego Zebrał i opracował: mgr inż. Marcin Jabłoński
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr Eksperymentalne wyznaczenie charakteru oporów w przewodach hydraulicznych opory liniowe Opracowanie: Z.Kudżma, P. Osiński J. Rutański,
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr Eksperymentalne wyznaczenie charakteru oporów w przewodach hydraulicznych opory liniowe Opracowanie: Z.Kudżma, P. Osiński J. Rutański,
Elektromagnesy prądu stałego cz. 2
 Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie