Wykorzystanie metod i narzędzi informatyki dla potrzeb projektowania i implementacji zaawansowanych systemów sterowania i podejmowania decyzji
|
|
|
- Krystyna Kruk
- 8 lat temu
- Przeglądów:
Transkrypt
1 Projektowanie i prototypowanie systemów sterowania z wykorzystaniem środowiska Matlab/Simulink, jego darmowych odpowiedników oraz zbliżonych funkcjonalnie narzędzi informatycznych wady, zalety, funkcjonalność, ograniczenia Wykorzystanie metod i narzędzi informatyki dla potrzeb projektowania i implementacji zaawansowanych systemów sterowania i podejmowania decyzji

2 Definicje CAD - Computer-Aided Design Projektowanie wspomagane komputerowo CAE - Computer-Aided Engineering Inżynieria wspomagana komputerowo CAM - Computer-Aided Manufacturing Wytwarzanie wspomagane komputerowo

3 Cykl powstawania produktu CAD i CAE powstały w celu skrócenia procesu produkcyjnego. Zastosowanie komputerów i specjalizowanego oprogramowania uczyniło ten etap bardziej elastycznym etapy biznesowe np. badania rynku Rozwój koncepcji CAD Projekt Kalkulacja CAD Prototyp CAE Testowanie CAE Produkcja CAM Wyrób

4 Prototyp Prototyp - pierwowzór; pierwszy, próbny, doświadczalny egzemplarz maszyny nowego typu; wzorzec. Zatem prototypowanie to ogół czynności zmierzających do opracowania próbnego, doświadczalnego egzemplarza maszyny, obiektu, regulatora itd.

5 Szybkie prototypowanie (ang. Rapid prototyping) Pojęcie znane w różnych dziedzinach inżynierii Mechanice i architekturze- CAD/CAM/CNC/Drukarki3D Informatyce - środowiska RAD (ang. Rapid Application Development) zawierające wizualne komponenty wspomagające programowanie (np. środowiska Visual C++ czy C++ Builder CodeGear dawniej Borland) Elektronice zintegrowane środowiska do projektowania układów elektronicznych np. OrCAD, Protel zintegrowane z systemami trawienia płytek drukowanych i lutowaniem elementów Typowe programy CAD/CAE: SolidWorks, Pro/ENGINEER, Autodesk Inventor
 Elektronice zintegrowane środowiska do projektowania układów elektronicznych np.")
6 Szybkie prototypowanie w automatyce W automatyce szybkie prototypowanie oznacza ogół czynności zmierzających do zbudowania prototypu układu sterowania umożliwiającego wszechstronne przetestowanie badanego aspektu najczęściej jakości działania regulatora, ale także urządzenia pomiarowego, wykonawczego, optymalizatora, estymatora, filtru, systemu wspomagania decyzji itd.

7 Szybkie prototypowanie w automatyce Zmierza do stworzenia takich warunków w jakich przyjdzie pracować badanemu urządzeniu Nie chodzi tu już o czystą: symulację komputerową, tylko działanie in situ w miejscu, w warunkach jakich będzie pracowało dane urządzenie. Urządzenie implementujące badany element przeważnie posiada większe możliwości niż docelowe

8 Dlaczego warto się zajmować RAD/SCRz w Matlab/Simulink? Jest to obecnie najpopularniejsze środowisko symulacyjne zarówno w przemyśle jak i środowisku naukowym. Oferuje szerokie możliwości symulacji programowej i bogatą bibliotekę funkcji, procedur, przyborników Wykorzystanie możliwości środowiska Matlab/Simulink nie musi ograniczać się do symulacji programowej

9 Dlaczego warto się zajmować RAD/SCRz w Matlab/Simulink? Wykorzystanie narzędzi Real-Time Workshop umożliwia implementację systemów wbudowanych na wielu różnych platformach (mikrokontrolery, PCty, DSP, RTOSy) Wykorzystanie przyborników Real-Time Windows Target oraz xpc wraz z kartami akwizycji danych pomiarowych umożliwia uzyskanie symulacji HIL

10 Dlaczego warto się zajmować SCRz w Matlab/Simulink? Otrzymujemy zatem niezwykle elastyczne środowisko symulacyjne i zarazem środowisko szybkiego prototypowania i weryfikacji systemów wbudowanych. Jest to nowoczesny, funkcjonalny i elastyczny sposób pracy inżyniera automatyka

11 Szybkie prototypowanie w automatyce Systemy przeznaczone do szybkiego prototypowania cechują się dużą elastycznością tj. możliwościami realizacji różnych zadań i włączania w różne miejsca pętli sterowania, możliwościami analizy i oceny jakości pracy prototypu. Przeważnie nie są przeznaczone jako docelowe, przemysłowe urządzenia.

12 Współczesne projektowanie Projektowanie i wytwarzanie w ogólnie pojętej inżynierii zmieniło się istotnie w ciągu ostatnich lat. Najistotniejszymi czynnikami wpływającymi na te zmiany są (zintegrowane) środowiska do projektowania, symulacji, optymalizacji, wspomagania wytwarzania i zarządzania. Klasyczne podejście z posiadaniem fizycznego prototypu i testowaniu jego podsystemów zastąpiono narzędziami symulacyjnymi. Pozwala to w ogólności na: Skrócenie czasu realizacji projektu Zmniejszenie kosztów Testowanie całego systemu wraz z otoczeniem Szybsze zauważenie problemów integracji poszczególnych podsystemów Przewidywanie różnych, rozbudowanych scenariuszy Zrównoleglenie pracy i testowanie oprogramowania przed posiadaniem fizycznej części Podniesienie jakości produktu

13 Zastosowanie narzędzi symulacyjnych podczas fazy projektowej pozwala na testowanie podsystemów zarówno w zakresie ich działania szczegółowego, konkretnego dla danego podsystemu jak również ich współpracy i interakcji. Możliwe jest sprawdzenie poprawności działania systemu, jego niezawodności i ewentualnej potrzeby uwzględnienia redundancji. W symulacji mogą być uwzględnione zagadnienia starzenia się sprzętu i analizy jego pracy podczas użytkowania. Biorąc pod uwagę powyższe kolejne zalety tego typu projektowania to: minimalizowanie ryzyka, podniesienie efektywności procesu wytwarzania produktu, osiągnięcie wyższej jakości w krótszych okresach.

14 Główne elementy środowiska Projektowanie z wykorzystaniem modelowania Środowisko symulacyjno/weryfikacyjne

15 Wybrane gałezie przemysłu korzystające z CAD/CAE/CAM Lotniczy Kosmiczny Motoryzacja Chemia Energetyka Transport/logistyka

16 Współczesny proces projektowania [1]

17 Symulacja jest podejściem do analizy systemu dynamicznego w celu możliwości zapoznania się niejako od wewnątrz z zachowaniem tego systemu. Symulacja prowadzi do wykonywania eksperymentów na modelu systemu przy czym symulowany system odnosi się do rzeczywistego obiektu natomiast symulowany model jest jego abstrakcją.

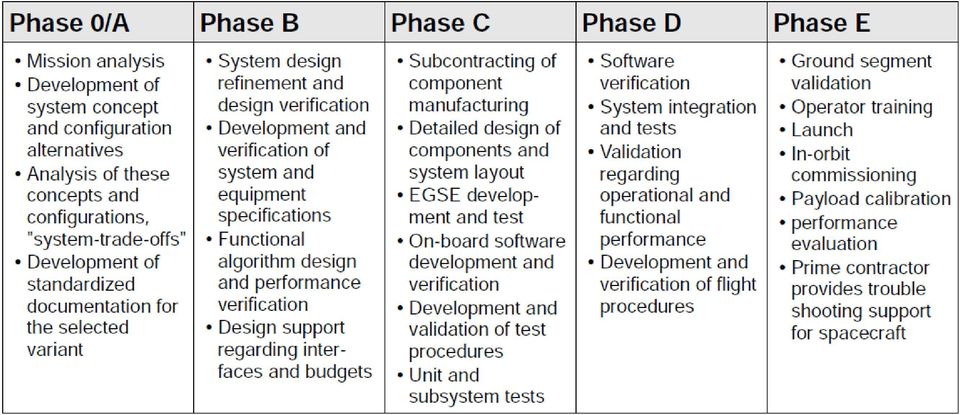
![Przykładowy proces powstawania satelity [1] Phases and](/docs-images/21/1264872/images/18-0.png "milestones in space projects PSP - Product Structure")
18 Przykładowy proces powstawania satelity [1] Phases and milestones in space projects PSP - Product Structure Plan


19
20 System za wyjątkiem elementów pasywnych może być zazwyczaj przedstawiony za pomocą abstrakcji składającej się z sterowań (oddziaływań) oraz fizyki (modelu) obiektu, na który oddziałujemy Projektowanie i weryfikacja takich systemów obecnie oparte są na drodze symulacyjnej. Modelowane są zjawiska fizyczne zachodzące w obiekcie sterowania (elektryczne, mechaniczne, termodynamiczne, dynamika płynów itd.) oraz oddziałujący na model system sterowania. Realizacja poszczególnych zjawisk może być prowadzona z różnym poziomem odwzorowania detali. Kryteria techniczne prowadzenia symulacji tak pojętego systemu dotyczą analizy, współpracy i interakcji wszystkich elementów systemu otrzymywania rezultatów symulacji jako systemu rozumianego jako całość Otrzymanego za pomocą modelowania: składowych systemu i ich funkcjonalności, interfejsów, metod współpracy i interakcji podczas połączeń i działania, zjawisk zewnętrznych, które mogą zaistnieć w trakcie pracy systemu.

21 Szczegółowość oraz złożoność modelowania systemu wynika z zapotrzebowania procesu inżynierskiego. Modele symulacyjne zawierają funkcjonalność docelowych urządzeń uwzględniając np. protokoły komunikacyjne, tryby pracy, zużycie energii itd. Jednak w modelu nie jest najważniejsze dokładne odwzorowanie samego sposobu działania danego komponenetu, a raczej jego znaczenie w systemie i uwzględnienie sposobu działania z innymi elementami. W związku z tym mogą być zastosowane uproszczenia modeli jednak oczywiście do granicy określonej przez założoną dokładność i funkcjonalność modelu.
22 Zasadniczo odchodzi się od analizowania oddzielnie różnych aspektów modelowanego systemu np. oddzielnego modelu mechanicznego i elektrycznego czy termodynamicznego. Podejście nazwane "model-based development and verification zostało zastosowane do satelity CryoSat 1 przez Europejską Agencję kosmiczną gdzie model prototypowy został całkowicie zastąpiony przez symulacje.
23 Ograniczenie ryzyka takiego podejścia uzyskuje się przez: Projektowaniu w miarę możliwości z wykorzystaniem standardowych komponentów przesymulowanie rozpatrywanych konfiguracji przez ich realizacją sprzętową oraz szerokie wykorzystanie technik symulacyjnych, aby wspierać wszystkie ważne etapy weryfikacji projektu systemu, Jest to podejście nazwane "Assembly, Integration and Testing", (AIT).
24 Weryfikacja oznacza sprawdzenie, czy wszystkie zdefiniowane wymagania systemowe, które są określone w dokumencie wymagań formalnych, są spełnione. Dowód może być osiągnięty przez analizę obliczeń, symulacji, testów i kontroli - metody dobrane są w zależności od rodzaju wymagań. Walidacja jest, po to aby sprawdzić, że system, wykonuje, jak pierwotnie zakładano np. o ładowności, że zapewnia obrazy o określonej rozdzielczości itd.
25 Współczesne złożone systemy takie jak samoloty, samochody, statki kosmiczne lub inne złożone maszyny współcześnie budowane są jako zestaw wyposażenie sprzętowe i oprogramowanie sterujące OBC On-board computer OBSW On-board software
26 Rysunek przedstawia proces rozwoju jako klasyczny model V, składający się z gałęzi: projektowania i weryfikacji. Ten model jednak dla całego systemu, składa się z zestawu połączonych V-etapów. Można go odczytać w następujący sposób - od prawej do lewej: Aby móc sprawdzić szczegółowe wymagania na system (w tym przypadku statek kosmiczny) przez testowanie systemu, oprogramowanie dla docelowego komputera musi być dostępne Oznacza to, integracja sprzętu (HW) / oprogramowania (SW) musi być zakończona w tym etapie. W celu sprawdzenia prawidłowej integracji HW / SW, już wstępnie zweryfikowane oprogramowanie sterujące musi być dostępne. I wreszcie, aby móc wcześniej sprawdzić oprogramowanie dla zintegrowanych algorytmów sterowania - na przykład do kontroli położenia - dane referencyjne muszą być dostępne. Te ostatnie pochodzą z kampanii weryfikacji algorytmu, który też musi być już zakończone w tym punkcie.
27 Rysunek V ponadto wskazuje na ważny fakt dotyczący modelowania i weryfikacji systemu i koniecznej infrastruktury. Do weryfikacji wszystkich testów funkcjonalności, infrastruktura sprzętowoprogramowa jest potrzebna, niezależnie od szczebla - najprostszej weryfikacji algorytmu, aż do bardzo złożonych testów systemowych najwyższego poziomu. Więc w rozwoju systemu do projektowania i badania należy przewidzieć środowisko: dla algorytmów sterowania, do transformacji algorytmów do kodu oprogramowania na docelowym sprzęcie (przed zintegrowaniem ze sprzętem docelowym), do integracji sprzętu / oprogramowania i wreszcie, dla całego systemu - tu statków kosmicznych - w tym zintegrowanego komputera pokładowego.
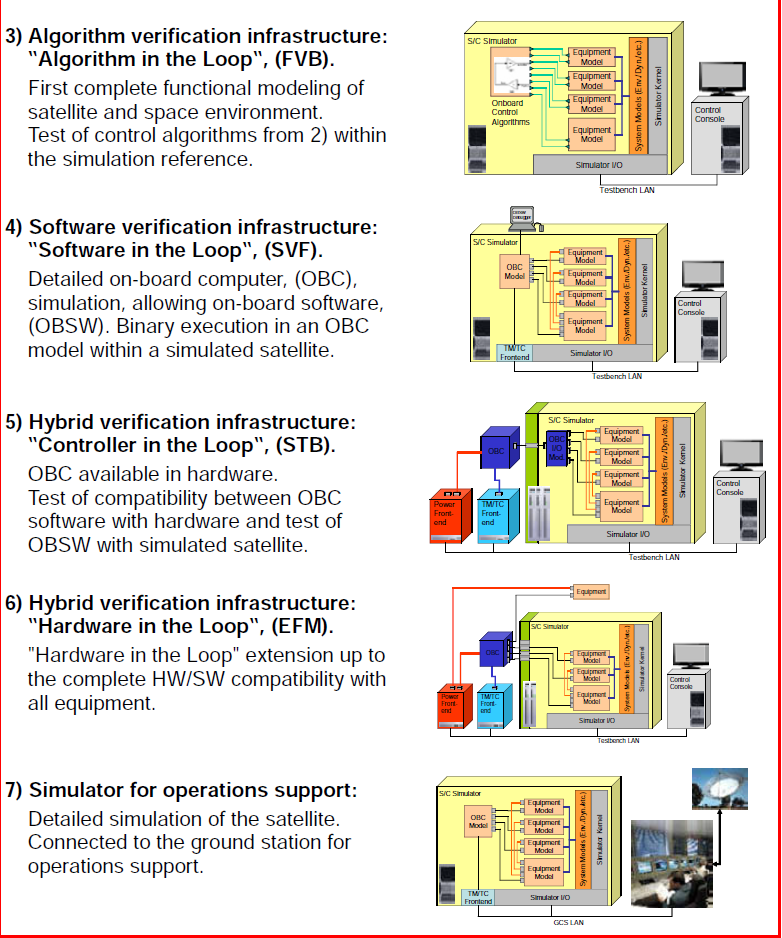
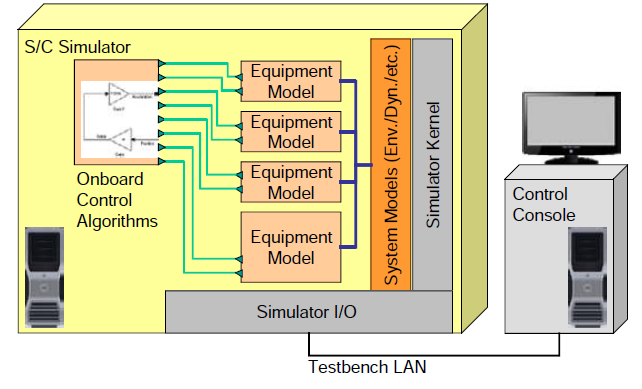
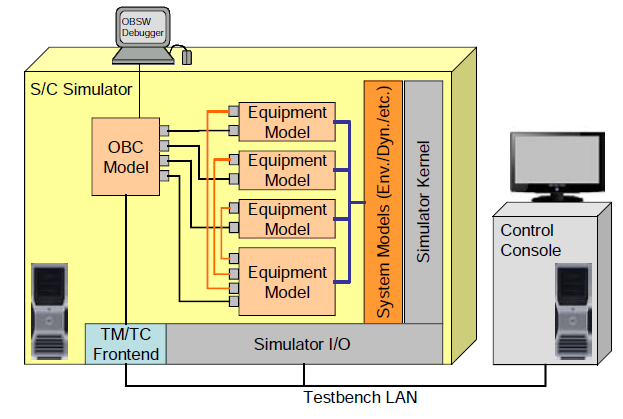
28 W początkowym etapie, fizyka systemu jest modelowana - w oprogramowaniu lub w stanowisku badawczym i opracowane algorytmy sterowania są włączone do sterowania systemem. Algorytmy w większości nie zostały jeszcze wdrożone w języku programowania docelowego, ani dla docelowego sprzętu. Ten rodzaj testu jest nazywany "Algorytm w pętli". "Algorithm in the Loop Po drugie, algorytmy są zakodowane w języku docelowym. Oprogramowanie sterujące jest wykorzystane do sterowania systemem. Ten rodzaj badań jest nazywany "Oprogramowanie w pętli". "Software in the Loop Trzecim krokiem jest załadowanie oprogramowania sterującego do komputera docelowego. Zasada ta nazywa się "Sterownik w pętli". Pierwszy etap badań to integracja oprogramowania na komputerze docelowym. "Controller in the Loop Czwarty i ostatni etap testowania systemu to oprogramowania sterującego w sprzęcie docelowym teraz kontrolować modelowany system. Ta faza nazywana jest "Komputery w pętli". "Hardwarein the Loop
29
30
31
32

33

34
35
36 Oprogramowanie wspomagające projektowanie/symulację/testowanie Matlab LabView SciLab Modelica GnuOctave i wiele innych mniej znanych
37 Matlab wybrane toolboxy na potrzeby budowania prototypów i wdrażania MATLAB Coder Generate C and C++ code from MATLAB code MATLAB Compiler Build standalone applications and software components from MATLAB programs Simulink Coder Generate C and C++ code from Simulink and Stateflow models Simulink PLC Coder Generate IEC Structured Text for PLCs and PACs Simulink Real-Time Build, run, and test real-time applications Real-Time Windows Target Run Simulink models in real time on Microsoft Windows PCs 164 third party solutions Real-Time simulation Programming Raspberry Pi with Simulink Arduino Support from MATLAB
38 Matlab Coder MATLAB Coder generates standalone C and C++ code from MATLAB code. The generated source code is portable and readable. MATLAB Coder supports a subset of core MATLAB language features, including program control constructs, functions, and matrix operations. It can generate MEX functions that let you accelerate computationally intensive portions of MATLAB code and verify the behavior of the generated code.
39 Matlab Coder C or C++ source code enables you to: Prototype on PCs Create a library Implement as embedded code The MEX function can be called in place of the original MATLAB code to: Verify the compiled code back in MATLAB Accelerate the execution
40 Matlab Coder ANSI/ISO compliant C and C++ code generation MEX function generation for fixed-point and floating-point math Project management tool for specifying entry points, input data properties, and other code-generation configuration options Static or dynamic memory allocation for variable-size data Code generation support for many functions and System objects in Communications System Toolbox, Computer Vision System Toolbox, DSP System Toolbox, and Phased Array System Toolbox Support for common language matlab features, including matrix operations, subscripting, program control statements (if, switch, for, while), and structures MATLAB Coder works with Simulink Coder and Embedded Coder to generate C code from Simulink models that contain MATLAB code. The generated C code can be used for: Standalone execution Integration with other software Accelerating MATLAB algorithms Embedded implementation
41 MATLAB Compiler MATLAB Compiler lets you share MATLAB programs as standalone applications or shared libraries for integration with common programming languages. Applications and libraries created with MATLAB Compiler use the MATLAB Compiler Runtime, which enables royalty-free deployment to users who do not have MATLAB. You can package the MATLAB Compiler Runtime with the application or have your users download it during installation.
42 Matlab Compiler Packaging of your MATLAB programs as standalone applications or shared libraries Royalty-free distribution of applications to users who do not have MATLAB Integration of MATLAB programs into Java, Microsoft.NET, and Excel applications using MATLAB builder products Large-scale deployment of MATLAB programs using MATLAB Production Server Encryption of MATLAB code to protect your intellectual property
43 Matlab Compiler
44 Matlab Compiler
45
46
47 Simulink Coder Simulink Coder (formerly Real-Time Workshop ) generates and executes C and C++ code from Simulink diagrams, Stateflow charts, and MATLAB functions. The generated source code can be used for real-time and nonreal-time applications, including simulation acceleration, rapid prototyping, and hardware-in-the-loop testing. You can tune and monitor the generated code using Simulink or run and interact with the code outside MATLAB and Simulink.
48 Simulink Coder ANSI/ISO C and C++ code and executables for discrete, continuous, or hybrid Simulink and Stateflow models Incremental code generation for large models Integer, floating-point, and fixed-point data type support Code generation for single-rate, multirate, and asynchronous models Single-task, multitask, and multicore code execution with or without an RTOS External mode simulation for parameter tuning and signal monitoring
49 Simulink Coder Compiling and Executing Generated Code Simulink Coder offers built-in support for compilation and execution of generated code with popular desktop environments, including: Eclipse IDE Microsoft Visual C++ IDE Linux operating system Windows operating system
50 PLC Coder Simulink PLC Coder generates hardware-independent IEC Structured Text from Simulink models, Stateflow charts, and Embedded MATLAB functions. The Structured Text is generated in PLCopen XML and other file formats supported by widely used integrated development environments (IDEs). As a result, you can compile and deploy your application to numerous programmable logic controller (PLC) and programmable automation controller (PAC) devices. Simulink PLC Coder generates test benches that help you verify the Structured Text using PLC and PAC IDEs and simulation tools. Support for industry standards is available through IEC Certification Kit (for IEC and IEC 61511).
51 PLC Coder Automatic generation of IEC Structured Text Simulink support, including reusable subsystems, PID controller blocks, and lookup tables Stateflow support, including graphical functions, truth tables, and state machines Embedded MATLAB support, including if-else statements, loop constructs, and math operations Support for multiple data types, including Boolean, integer, enumerated, and floating-point, as well as vectors, matrices, buses, and tunable parameters IDE support, including 3S-Smart Software Solutions CoDeSys, Rockwell Automation RSlogix 5000, Siemens SIMATIC STEP 7, Omron Sysmac Studio, and PLCopen XML Test-bench creation Simulink PLC Coder generates test benches that help you verify the Structured Text using PLC and PAC IDEs and simulation tools.
52 PLC Coder Simulink PLC Coder can output Structured Text in a variety of file formats used by third-party IDEs. File formats supported by Simulink PLC Coder include: 3S-Smart Software Solutions CoDeSys B&R Automation Studio Beckhoff TwinCAT Omron Sysmac Studio KW-Software MULTIPROG Phoenix Contact PC WORX Rockwell Automation RSLogix 5000 Siemens SIMATIC STEP 7 IDE IDEs that use generic ASCII files PLCopen XML
53
54 Simulink Real-Time Simulink Real-Time lets you create real-time applications from Simulink models and run them on dedicated target computer hardware connected to your physical system. It supports real-time simulation and testing, including rapid control prototyping, DSP and vision system prototyping, and hardware-in-the-loop (HIL) simulation. With Simulink Real-Time you can extend your Simulink models with driver blocks, automatically generate real-time applications, define instrumentation, and perform interactive or automated runs on a dedicated target computer equipped with a real-time kernel, multicore CPU, I/O and protocol interfaces, and FPGAs. Simulink Real-Time and Speedgoat target computer hardware are expressly designed to work together to create real-time systems for desktop, lab, and field environments. Simulink Real-Time can also be used with custom target computer and I/O hardware
55 Simulink Real-Time Automatic generation of real-time applications from Simulink models targeting dedicated CPUs, I/O and protocol hardware, and FPGAs (with HDL Coder ) Multitasking and multicore real-time kernel with microsecond granularity and concurrent execution support Speedgoat target computer hardware integration for turnkey desktop, lab, and field use Driver blocks for I/O, including analog, digital, pulse train, encoders, transformers, passive components, serial, audio, shared memory, and reconfigurable FPGA Driver blocks for protocols and data buses, including Raw Ethernet, real-time UDP, CAN, EtherCAT, EtherNet/IP, Lin, SAE J1939, FlexRay, Camera Link, USB video, ARINC 429, and MIL-STD-1553 Simulink Real-Time Explorer with gigabit Ethernet connection to multiple target computers for management, execution, and instrumentation of real-time applications Standalone operation of real-time applications with high-resolution signal display MATLAB functions for test scripting, and APIs for developing standalone client applications and user interfaces (Visual Basic, C/C++, Java, and.net)
56 dspace Jest to sprzętowo-programowy system czasu rzeczywistego oparty o środowisko Matlab/Simulink Modelowanie (host computer) realizowane jest klasycznie w Matlabie/Simulinku natomiast wykonywanie modelu (target computer) wykonywane jest na platformie sprzętowej z procesorem/procesorami sygnałowymi DSP. Dzięki temu uzyskuje się dużą rozdzielczość czasową. Rozwija firma dspace GMBH. Znajduje szerokie zastosowanie w przemyśle samochodowym i lotniczym
57 dspace
58 Real-Time Workshop RTW jest rozszerzeniem możliwości Matlaba i Simulinka umożliwiającym automatyczne generowanie, porządkowanie i kompilację kodu źródłowego z modeli w postaci Simulinka w celu wykorzystania w aplikacjach czasu rzeczywistego różnego typu.
59 Cechy RTW RTW stanowi narzędzie generowania kodu źródłowego dedykowanego dla danego środowiska uruchomieniowego umożliwiając tzw. szybkie prototypowanie i wdrażanie.
60 RTW Wraz z innymi narzędziami i komponentami Matlaba i Simulinka RTW cechuje: Automatyczne generowanie kodu dostosowane do różnych platform docelowych Szybka i prosta ścieżka od projektu systemu do jego implementacji Integracja z Matlabem i Simulinkiem Prosty, graficzny interfejs użytkownika Otwarta architektura i rozszerzalny proces budowy aplikacji
61 RTW Poniższy diagram prezentuje proces generowania kodu źródłowego z Simulinka za pomocą RTW
62 Główne składniki RTW Generator kodu Simulinka (ang. Simulink Code Generator) Automatycznie generuje kod w języku C z modelu Simulinka Proces tworzenia aplikacji (ang. Make Process) Proces tworzenia aplikacji w RTW rozszerzalny przez użytkownika umożliwia skonfigurowanie procesów kompilacji i linkowania kodu generowanego dla potrzeb użytkownika lub dla celów szybkiego prototypowania Tryb zewnętrzny Simulinka (ang. Simulink External Mode) Tryb zewnętrzny umożliwia komunikację pomiędzy Simulinkiem i modelem wykonywanym w środowisku czasu rzeczywistego lub w innym procesie na tym samym komputerze. Tryb zewnętrzny umożliwia strojenie parametrów, zapisywanie danych oraz wizualizację stanu procesu w trakcie wykonywania modelu.
63 Główne składniki RTW Wsparcie docelowości (ang. Targetting support) Wykorzystując docelowości załączone w RTW można budować systemy czasu rzeczywistego i środowiska prototypowania. Zarówno podstawowe jak i dodatkowe docelowości czasu rzeczywistego dostarczają struktury dla budowy konfigurowalnego szybkiego prototypowania lub budowy środowisk docelowych. Dodatkowo opcjonalne środowiska Real-Time Windows Target oraz xpc Target umożliwiają wykorzystanie niemal dowolnego PCta w system docelowy lub system szybkiego prototypowania. W celu uwzględnienia możliwości poszczególnych mikroprocesorów opcjonalny toolbox Real-Time Embbeded Coder umożliwia uruchamiania kodu RTW w różnych środowiskach mikroprocesorowych. odwzorowane w RTW i umożliwia generowanie kodu w sposób przyrostowy dla hierarchii niezależnych składników modeli
64 Główne składniki RTW Szybkie symulowanie (ang. Rapid Simulations) Wykorzystując tryb szybkiego symulowania, w S-funkcji lub szybkim symulowaniu można przyspieszyć wykonywanie symulacji średnio od 5 do 20 razy. Pliki wykonywalne w tych systemach omijają normalny tryb interpretatora Simulinka. Kod generowany przez Szybkie symulowanie, docelową S-funkcję i docelowe szybkie symulowanie jest wysoko optymalizowany do wykonywania wyłącznie algorytmów zawartych w modelu użytkownika. Dodatkowo generator kodu stosuje wiele technik optymalizujących takich jak likwidowanie zer i jedynek w obliczeniach dla bloków filtrów Modelowanie wielkiej skali (ang. Large-scale modeling) Wsparcie dla modelowania wielopoziomowego z Simulinka jest
65 Budowa aplikacji z RTW Określenie wymogów aplikacji Konfiguracja ustawień generowania kodu Uruchomienie narzędzia wspomagającego (ang. Model Advisor Tool) Ewentualna korekta ustawień konfiguracyjnych z wykorzystaniem raportu z narzędzia wspomagającego Generowanie kodu z modelu Simulinka Ewentualne powtórzenie operacji 2-5 Zbudowanie obrazu programu wykonywalnego Weryfikacja wyników generowanych przez program wykonywalny w porównaniu do wyników oryginalnego modelu Simulinka Zachowanie konfiguracji dla której dokonano generowania kodu Wykorzystanie narzędzia generowania raportu (ang. Report Generator) do automatycznego udokumentowania projektu
66 Budowa aplikacji z RTW
67 Przykład RTW Model układu sterowania
68 Parametry symulacji Przykład RTW
69 Przykład RTW System docelowy (ang. Target system)
70 Przykład RTW Obsługiwane systemy docelowe przez RTW
71 Po skompilowaniu otrzymujemy i możemy uruchomić skompilowany plik

72 W celu uruchomienia modelu w tzw. trybie zewnętrznym Simulinka ustawiamy w opcji Interface tryb External mode

73 Z menu Tools wybieramy opcję External Mode Control Panel i wybieramy opcję Signal&Triggering

74 Następnie wydajemy polecenie!pid tf inf w & w oknie External Mode Control Panel wybieramy komendę Connect, a później Start Real-Time Code. Otwierając okna oscyloskopów można obserwować przebiegi zmiennych. Ewnentualne zmiany parametrów w trakcie symulacji muszą być przesłane do modelu za pomocą opcji z menu Edit/Update Diagram. Aby zakończyć symulację wybierz opcję Stop Real-Time Code z External Mode Control Panel.
75 xpc oraz Raspberry PI zostaną przedstawione w osobnej prezentacji
76 Komunikat od dra MG Zajęcia laboratoryjne zaczynają się 4 listopada! Materiały dydaktyczne do laboratoruim będą dostępne tydzień wcześniej.
77 Bibliografia J. Eickhoff, Simulating Spacecraft Systems, Springer Aerospace Technology Springer- Verlag Berlin Heidelberg 2009 Materiały informacyjne/dokumentacja firmy Mathworks Simulink Coder PLC Coder Matlab Compiler
Systemy Czasu Rzeczywistego (SCR)
") SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 5: Modele projektowania systemu sterowania, idea szybkiego prototypowania układu sterowania RPC oraz symulacji w pętli sprzętowej HIL wprowadzenie WYDZIAŁ
SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 5: Modele projektowania systemu sterowania, idea szybkiego prototypowania układu sterowania RPC oraz symulacji w pętli sprzętowej HIL wprowadzenie WYDZIAŁ
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Idea szybkiego prototypowania układu sterowania RPC oraz symulacja w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink Politechnika
Systemy Czasu Rzeczywistego (SCR) Idea szybkiego prototypowania układu sterowania RPC oraz symulacja w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink Politechnika
Systemy Czasu Rzeczywistego (SCR)
") SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 6: Szybkie prototypowanie układu sterowania RPC oraz symulacji w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink
SKiTI2017 Systemy Czasu Rzeczywistego (SCR) Wykład 6: Szybkie prototypowanie układu sterowania RPC oraz symulacji w pętli sprzętowej HIL aspekty wybrane realizacji z wykorzystaniem środowiska Matlab/Simulink
Materiały dodatkowe. Simulink Real-Time
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Wybrane środowiska szybkiego prototypowania
 Wybrane środowiska szybkiego prototypowania SIMULINK REAL-TIME (DAWNIEJ XPC TARGET) SIMULINK SUPPORT PACKAGE FOR RASPBERRY PI HARDWARE PRZYGOTOWAŁ TOMASZ KARLA MATLAB/Simulink Real-Time (dawniej xpc Target)
Wybrane środowiska szybkiego prototypowania SIMULINK REAL-TIME (DAWNIEJ XPC TARGET) SIMULINK SUPPORT PACKAGE FOR RASPBERRY PI HARDWARE PRZYGOTOWAŁ TOMASZ KARLA MATLAB/Simulink Real-Time (dawniej xpc Target)
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Materiały dodatkowe. Raspberry Pi
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Raspberry Pi Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i służą
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Raspberry Pi Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i służą
Mechatronika i szybkie prototypowanie układów sterowania
 Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Mechatronika i szybkie prototypowanie układów sterowania Rozwój systemów technicznych Funkcje operacyjne Dostarczanie energii Wprowadzanie danych sterujących Generacje systemów technicznych prymitywny
Materiały dodatkowe. Simulink PLC Coder
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink
 Materiały pomocnicze do przedmiotu Systemy Czasu Rzeczywistego Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink Zawartość Czym jest Real-Time Windows Target (RTWT)?... 2 Bloki wejśd i wyjśd
Materiały pomocnicze do przedmiotu Systemy Czasu Rzeczywistego Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink Zawartość Czym jest Real-Time Windows Target (RTWT)?... 2 Bloki wejśd i wyjśd
Opracowanie ćwiczenia laboratoryjnego dotyczącego wykorzystania sieci przemysłowej Profibus. DODATEK NR 4 Instrukcja laboratoryjna
 Wydział Informatyki i Zarządzania Opracowanie ćwiczenia laboratoryjnego dotyczącego wykorzystania sieci przemysłowej Profibus DODATEK NR 4 Instrukcja laboratoryjna. Opracował: Paweł Obraniak Wrocław 2014
Wydział Informatyki i Zarządzania Opracowanie ćwiczenia laboratoryjnego dotyczącego wykorzystania sieci przemysłowej Profibus DODATEK NR 4 Instrukcja laboratoryjna. Opracował: Paweł Obraniak Wrocław 2014
Automatyka i Robotyka studia stacjonarne drugiego stopnia
 #384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
#384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
Strona główna > Produkty > Systemy regulacji > System regulacji EASYLAB - LABCONTROL > Program konfiguracyjny > Typ EasyConnect.
 Typ EasyConnect FOR THE COMMISSIONING AND DIAGNOSIS OF EASYLAB COMPONENTS, FSE, AND FMS Software for the configuration and diagnosis of controllers Type TCU3, adapter modules TAM, automatic sash device
Typ EasyConnect FOR THE COMMISSIONING AND DIAGNOSIS OF EASYLAB COMPONENTS, FSE, AND FMS Software for the configuration and diagnosis of controllers Type TCU3, adapter modules TAM, automatic sash device
Automatyczne generowanie testów z modeli. Bogdan Bereza Automatyczne generowanie testów z modeli
 Automatyczne generowanie testów z modeli Numer: 1 (33) Rozkmina: Projektowanie testów na podstawie modeli (potem można je wykonywać ręcznie, lub automatycznie zwykle chce się automatycznie) A ja mówię
Automatyczne generowanie testów z modeli Numer: 1 (33) Rozkmina: Projektowanie testów na podstawie modeli (potem można je wykonywać ręcznie, lub automatycznie zwykle chce się automatycznie) A ja mówię
Metody integracji systemów sterowania z wykorzystaniem standardu OPC
 Metody integracji systemów sterowania z wykorzystaniem standardu OPC (Control Systems Integration using OPC Standard) Autor: Marcin BAJER Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
Metody integracji systemów sterowania z wykorzystaniem standardu OPC (Control Systems Integration using OPC Standard) Autor: Marcin BAJER Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
SiR_13 Systemy SCADA: sterowanie nadrzędne; wizualizacja procesów. MES - Manufacturing Execution System System Realizacji Produkcji
 System informatyczny na produkcji: Umożliwi stopniowe, ale jednocześnie ekonomiczne i bezpieczne wdrażanie i rozwój aplikacji przemysłowych w miarę zmiany potrzeb firmy. Może adoptować się do istniejącej
System informatyczny na produkcji: Umożliwi stopniowe, ale jednocześnie ekonomiczne i bezpieczne wdrażanie i rozwój aplikacji przemysłowych w miarę zmiany potrzeb firmy. Może adoptować się do istniejącej
Logika rozmyta typu 2
 Logika rozmyta typu 2 Zbiory rozmyte Funkcja przynależności Interwałowe zbiory rozmyte Funkcje przynależności przedziałów Zastosowanie.9.5 Francuz Polak Niemiec Arytmetyka przedziałów Operacje zbiorowe
Logika rozmyta typu 2 Zbiory rozmyte Funkcja przynależności Interwałowe zbiory rozmyte Funkcje przynależności przedziałów Zastosowanie.9.5 Francuz Polak Niemiec Arytmetyka przedziałów Operacje zbiorowe
1.Wstęp. 2.Generowanie systemu w EDK
 1.Wstęp Celem niniejszego ćwiczenia jest zapoznanie z możliwościami debuggowania kodu na platformie MicroBlaze oraz zapoznanie ze środowiskiem wspomagającym prace programisty Xilinx Platform SDK (Eclipse).
1.Wstęp Celem niniejszego ćwiczenia jest zapoznanie z możliwościami debuggowania kodu na platformie MicroBlaze oraz zapoznanie ze środowiskiem wspomagającym prace programisty Xilinx Platform SDK (Eclipse).
Embedded Solutions Automaticon 2012. Efektywne pomiary i sterowanie przy użyciu systemu wbudowanego MicroDAQ
 Embedded Solutions Automaticon 2012 Efektywne pomiary i sterowanie przy użyciu systemu wbudowanego MicroDAQ Grzegorz Skiba info@embedded-solutions.pl 1 Plan seminarium Budowa systemu MicroDAQ Zastosowanie
Embedded Solutions Automaticon 2012 Efektywne pomiary i sterowanie przy użyciu systemu wbudowanego MicroDAQ Grzegorz Skiba info@embedded-solutions.pl 1 Plan seminarium Budowa systemu MicroDAQ Zastosowanie
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Projektowanie systemów informatycznych. Roman Simiński programowanie.siminskionline.pl. Cykl życia systemu informatycznego
 systemów informatycznych Roman Simiński roman.siminski@us.edu.pl programowanie.siminskionline.pl Cykl życia systemu informatycznego Trochę wprowadzenia... engineering co to oznacza? Oprogramowanie w sensie
systemów informatycznych Roman Simiński roman.siminski@us.edu.pl programowanie.siminskionline.pl Cykl życia systemu informatycznego Trochę wprowadzenia... engineering co to oznacza? Oprogramowanie w sensie
Materiały oryginalne: ZAWWW-2st1.2-l11.tresc-1.0kolor.pdf. Materiały poprawione
 Materiały oryginalne: ZAWWW-2st1.2-l11.tresc-1.0kolor.pdf Materiały poprawione Rozwiązanie zadania w NetBeans IDE 7.4: Jarosław Ksybek, Adam Miazio Celem ćwiczenia jest przygotowanie prostej aplikacji
Materiały oryginalne: ZAWWW-2st1.2-l11.tresc-1.0kolor.pdf Materiały poprawione Rozwiązanie zadania w NetBeans IDE 7.4: Jarosław Ksybek, Adam Miazio Celem ćwiczenia jest przygotowanie prostej aplikacji
Projektowanie baz danych za pomocą narzędzi CASE
 Projektowanie baz danych za pomocą narzędzi CASE Metody tworzenia systemów informatycznych w tym, także rozbudowanych baz danych są komputerowo wspomagane przez narzędzia CASE (ang. Computer Aided Software
Projektowanie baz danych za pomocą narzędzi CASE Metody tworzenia systemów informatycznych w tym, także rozbudowanych baz danych są komputerowo wspomagane przez narzędzia CASE (ang. Computer Aided Software
ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC
 Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Analiza i projektowanie oprogramowania. Analiza i projektowanie oprogramowania 1/32
 Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie:
Analiza i projektowanie oprogramowania Analiza i projektowanie oprogramowania 1/32 Analiza i projektowanie oprogramowania 2/32 Cel analizy Celem fazy określania wymagań jest udzielenie odpowiedzi na pytanie:
Prototypowanie systemów sterowania
 Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 6 Zasady testowania w czasie
Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 6 Zasady testowania w czasie
Karta (sylabus) modułu/przedmiotu Inżynieria Materiałowa Studia II stopnia specjalność: Inżynieria Powierzchni
 modułu/przedmiotu Inżynieria Materiałowa Studia II stopnia specjalność: Inżynieria Powierzchni") Karta (sylabus) modułu/przedmiotu Inżynieria Materiałowa Studia II stopnia specjalność: Inżynieria Powierzchni Przedmiot: Zintegrowane systemy wytwarzania Rodzaj przedmiotu: obowiązkowy Kod przedmiotu:
Karta (sylabus) modułu/przedmiotu Inżynieria Materiałowa Studia II stopnia specjalność: Inżynieria Powierzchni Przedmiot: Zintegrowane systemy wytwarzania Rodzaj przedmiotu: obowiązkowy Kod przedmiotu:
Integracja systemu CAD/CAM Catia z bazą danych uchwytów obróbkowych MS Access za pomocą interfejsu API
 Dr inż. Janusz Pobożniak, pobozniak@mech.pk.edu.pl Instytut Technologii Maszyn i Automatyzacji produkcji Politechnika Krakowska, Wydział Mechaniczny Integracja systemu CAD/CAM Catia z bazą danych uchwytów
Dr inż. Janusz Pobożniak, pobozniak@mech.pk.edu.pl Instytut Technologii Maszyn i Automatyzacji produkcji Politechnika Krakowska, Wydział Mechaniczny Integracja systemu CAD/CAM Catia z bazą danych uchwytów
Narzędzia CASE dla.net. Łukasz Popiel
 Narzędzia CASE dla.net Autor: Łukasz Popiel 2 Czym jest CASE? - definicja CASE (ang. Computer-Aided Software/Systems Engineering) g) oprogramowanie używane do komputerowego wspomagania projektowania oprogramowania
Narzędzia CASE dla.net Autor: Łukasz Popiel 2 Czym jest CASE? - definicja CASE (ang. Computer-Aided Software/Systems Engineering) g) oprogramowanie używane do komputerowego wspomagania projektowania oprogramowania
REFERAT PRACY DYPLOMOWEJ
 REFERAT PRACY DYPLOMOWEJ Temat pracy: Projekt i implementacja środowiska do automatyzacji przeprowadzania testów aplikacji internetowych w oparciu o metodykę Behavior Driven Development. Autor: Stepowany
REFERAT PRACY DYPLOMOWEJ Temat pracy: Projekt i implementacja środowiska do automatyzacji przeprowadzania testów aplikacji internetowych w oparciu o metodykę Behavior Driven Development. Autor: Stepowany
WYKORZYSTANIE PLATFORMY FireMonkey W PROCESIE URUCHAMIANIA I TESTOWANIA UKŁADÓW MIKROPROCESOROWYCH
 Dr inż. Jacek WARCHULSKI Dr inż. Marcin WARCHULSKI Mgr inż. Witold BUŻANTOWICZ Wojskowa Akademia Techniczna Mgr inż. Grzegorz MUCHA MUCHTECH WYKORZYSTANIE PLATFORMY FireMonkey W PROCESIE URUCHAMIANIA I
Dr inż. Jacek WARCHULSKI Dr inż. Marcin WARCHULSKI Mgr inż. Witold BUŻANTOWICZ Wojskowa Akademia Techniczna Mgr inż. Grzegorz MUCHA MUCHTECH WYKORZYSTANIE PLATFORMY FireMonkey W PROCESIE URUCHAMIANIA I
Język UML w modelowaniu systemów informatycznych
 Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 10 Diagramy wdrożenia I Diagramy wdrożenia - stosowane do modelowania
Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 10 Diagramy wdrożenia I Diagramy wdrożenia - stosowane do modelowania
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
AUREA BPM HP Software. TECNA Sp. z o.o. Strona 1 z 7
 AUREA BPM HP Software TECNA Sp. z o.o. Strona 1 z 7 HP APPLICATION LIFECYCLE MANAGEMENT Oprogramowanie Application Lifecycle Management (ALM, Zarządzanie Cyklem życia aplikacji) wspomaga utrzymanie kontroli
AUREA BPM HP Software TECNA Sp. z o.o. Strona 1 z 7 HP APPLICATION LIFECYCLE MANAGEMENT Oprogramowanie Application Lifecycle Management (ALM, Zarządzanie Cyklem życia aplikacji) wspomaga utrzymanie kontroli
Projektowanie bazujące na modelach
 Projektowanie mechatroniczne. Projektowanie bazujące na modelach Krzysztof Pietrusewicz 1. Wprowadzenie W artykule niniejszym przedstawiono problematykę realizacji innowacyjnych prac nad systemami sterowania
Projektowanie mechatroniczne. Projektowanie bazujące na modelach Krzysztof Pietrusewicz 1. Wprowadzenie W artykule niniejszym przedstawiono problematykę realizacji innowacyjnych prac nad systemami sterowania
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program
 LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie środowiska LabVIEW 2016
LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie środowiska LabVIEW 2016
FAQ: 00000042/PL Data: 3/07/2013 Konfiguracja współpracy programów PC Access i Microsoft Excel ze sterownikiem S7-1200
 Spis treści 1 Opis zagadnienia omawianego w dokumencie.. 2 2 Wstęp do nowego projektu..... 3 2.1 Nowy projekt... 3 2.2 Dodanie nowego urządzenia... 4 3 Program w main... 6 4 Program PC Access.... 8 4.1
Spis treści 1 Opis zagadnienia omawianego w dokumencie.. 2 2 Wstęp do nowego projektu..... 3 2.1 Nowy projekt... 3 2.2 Dodanie nowego urządzenia... 4 3 Program w main... 6 4 Program PC Access.... 8 4.1
Programowanie niskopoziomowe
 W. Complak, J.Kniat, M. Antczak, K. Kwarciak, G. Palik, A. Rybarczyk, Ł. Wielebski Materiały Programowanie niskopoziomowe http://www.cs.put.poznan.pl/arybarczyk/c_w_0.pdf Spis treści 1. Instalacja środowiska
W. Complak, J.Kniat, M. Antczak, K. Kwarciak, G. Palik, A. Rybarczyk, Ł. Wielebski Materiały Programowanie niskopoziomowe http://www.cs.put.poznan.pl/arybarczyk/c_w_0.pdf Spis treści 1. Instalacja środowiska
Laboratorium 1 Temat: Przygotowanie środowiska programistycznego. Poznanie edytora. Kompilacja i uruchomienie prostych programów przykładowych.
 Laboratorium 1 Temat: Przygotowanie środowiska programistycznego. Poznanie edytora. Kompilacja i uruchomienie prostych programów przykładowych. 1. Przygotowanie środowiska programistycznego. Zajęcia będą
Laboratorium 1 Temat: Przygotowanie środowiska programistycznego. Poznanie edytora. Kompilacja i uruchomienie prostych programów przykładowych. 1. Przygotowanie środowiska programistycznego. Zajęcia będą
Realizacja systemów wbudowanych (embeded systems) w strukturach PSoC (Programmable System on Chip)
 w strukturach PSoC (Programmable System on Chip)") Realizacja systemów wbudowanych (embeded systems) w strukturach PSoC (Programmable System on Chip) Embeded systems Architektura układów PSoC (Cypress) Możliwości bloków cyfrowych i analogowych Narzędzia
Realizacja systemów wbudowanych (embeded systems) w strukturach PSoC (Programmable System on Chip) Embeded systems Architektura układów PSoC (Cypress) Możliwości bloków cyfrowych i analogowych Narzędzia
Oferta edukacyjna Uniwersytetu Rzeszowskiego. www.mechatronika.univ.rzeszow.pl
 Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
Co to jest jest oprogramowanie? 8. Co to jest inżynieria oprogramowania? 9. Jaka jest różnica pomiędzy inżynierią oprogramowania a informatyką?
 ROZDZIAŁ1 Podstawy inżynierii oprogramowania: - Cele 2 - Zawartość 3 - Inżynieria oprogramowania 4 - Koszty oprogramowania 5 - FAQ o inżynierii oprogramowania: Co to jest jest oprogramowanie? 8 Co to jest
ROZDZIAŁ1 Podstawy inżynierii oprogramowania: - Cele 2 - Zawartość 3 - Inżynieria oprogramowania 4 - Koszty oprogramowania 5 - FAQ o inżynierii oprogramowania: Co to jest jest oprogramowanie? 8 Co to jest
USB firmware changing guide. Zmiana oprogramowania za przy użyciu połączenia USB. Changelog / Lista Zmian
 1 / 12 Content list / Spis Treści 1. Hardware and software requirements, preparing device to upgrade Wymagania sprzętowe i programowe, przygotowanie urządzenia do aktualizacji 2. Installing drivers needed
1 / 12 Content list / Spis Treści 1. Hardware and software requirements, preparing device to upgrade Wymagania sprzętowe i programowe, przygotowanie urządzenia do aktualizacji 2. Installing drivers needed
Internet jako środowisko WL OZE/URE Propozycja metodologii badań oraz stanowiska laboratoryjnego
 1 Internet jako środowisko WL OZE/URE Propozycja metodologii badań oraz stanowiska laboratoryjnego 2 Proponowana metodologia oraz stanowisko umożliwi przeprowadzenie badań związanych z infrastrukturą zarządzającą
1 Internet jako środowisko WL OZE/URE Propozycja metodologii badań oraz stanowiska laboratoryjnego 2 Proponowana metodologia oraz stanowisko umożliwi przeprowadzenie badań związanych z infrastrukturą zarządzającą
Prototypowanie systemów sterowania
 Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 4 Prototypowanie układów
Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 4 Prototypowanie układów
Technika mikroprocesorowa. Struktura programu użytkownika w systemie mikroprocesorowym
 Struktura programu użytkownika w systemie mikroprocesorowym start inicjalizacja niekończaca się pętla zadania niekrytyczne czasowo przerwania zadania krytyczne czasowo 1 Znaczenie problematyki programowania
Struktura programu użytkownika w systemie mikroprocesorowym start inicjalizacja niekończaca się pętla zadania niekrytyczne czasowo przerwania zadania krytyczne czasowo 1 Znaczenie problematyki programowania
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
2013-05-16. Podstawowe cechy IMS
 IMS jest systemem, w którym w znacznym stopniu ergotransformacyjność zostaje zastąpiona maszynowym przetwarzaniem danych, wykorzystującym informatyczne technologie sztucznej inteligencji Zawadzka, Współczesne
IMS jest systemem, w którym w znacznym stopniu ergotransformacyjność zostaje zastąpiona maszynowym przetwarzaniem danych, wykorzystującym informatyczne technologie sztucznej inteligencji Zawadzka, Współczesne
Informatyka studia stacjonarne pierwszego stopnia
 #382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
#382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
Projekt i uruchomienie prostego serwera OPC UA w oparciu o oprogramowanie szkieletowe Quasar opracowane w CERN
 Mateusz Kołodziejczyk (PB, UwB) Projekt i uruchomienie prostego serwera OPC UA w oparciu o oprogramowanie szkieletowe Quasar opracowane w CERN Julian Sacharczuk (UR) Opiekunowie: mgr inż. Jolanta Olszowska
Mateusz Kołodziejczyk (PB, UwB) Projekt i uruchomienie prostego serwera OPC UA w oparciu o oprogramowanie szkieletowe Quasar opracowane w CERN Julian Sacharczuk (UR) Opiekunowie: mgr inż. Jolanta Olszowska
Projektowanie z użyciem procesora programowego Nios II
 Projektowanie z użyciem procesora programowego Nios II WSTĘP Celem ćwiczenia jest nauczenie projektowania układów cyfrowych z użyciem wbudowanych procesorów programowych typu Nios II dla układów FPGA firmy
Projektowanie z użyciem procesora programowego Nios II WSTĘP Celem ćwiczenia jest nauczenie projektowania układów cyfrowych z użyciem wbudowanych procesorów programowych typu Nios II dla układów FPGA firmy
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia
 Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
Zagadnienia kierunkowe Kierunek mechanika i budowa maszyn, studia pierwszego stopnia 1. Wymiń warunki równowagi dowolnego płaskiego układu sił. 2. Co można wyznaczyć w statycznej próbie rozciągani. 3.
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego
 Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
Większe możliwości dzięki LabVIEW 2009: programowanie równoległe, technologie bezprzewodowe i funkcje matematyczne w systemach czasu rzeczywistego Dziś bardziej niż kiedykolwiek narzędzia używane przez
Bezpieczeństwo informacji oparte o kryptografię kwantową
 WYŻSZA SZKOŁA BIZNESU W DĄBROWIE GÓRNICZEJ WYDZIAŁ ZARZĄDZANIA INFORMATYKI I NAUK SPOŁECZNYCH Instrukcja do laboratorium z przedmiotu: Bezpieczeństwo informacji oparte o kryptografię kwantową Instrukcja
WYŻSZA SZKOŁA BIZNESU W DĄBROWIE GÓRNICZEJ WYDZIAŁ ZARZĄDZANIA INFORMATYKI I NAUK SPOŁECZNYCH Instrukcja do laboratorium z przedmiotu: Bezpieczeństwo informacji oparte o kryptografię kwantową Instrukcja
FAQ: 00000069/PL Data: 01/06/2015 WinCC Professional konfiguracja struktury klient-serwer
 System wizualizacji WinCC Professional można skonfigurować w różnych strukturach dostępu dla użytkownika. Architektura, jaką zastosujemy zależy głównie od wymogów zakładowych i ma istotny wpływ na późniejszą
System wizualizacji WinCC Professional można skonfigurować w różnych strukturach dostępu dla użytkownika. Architektura, jaką zastosujemy zależy głównie od wymogów zakładowych i ma istotny wpływ na późniejszą
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU
 Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
ICD Wprowadzenie. Wprowadzenie. Czym jest In-Circuit Debugger? 2. O poradniku 3. Gdzie szukać dodatkowych informacji? 4
 ICD 2 Czym jest In-Circuit Debugger? 2 O poradniku 3 Gdzie szukać dodatkowych informacji? 4 ICD 1 ICD 25.08.2009 Czym jest In-Circuit Debugger? Większość procesorów dostarcza systemów debugowania (ang.
ICD 2 Czym jest In-Circuit Debugger? 2 O poradniku 3 Gdzie szukać dodatkowych informacji? 4 ICD 1 ICD 25.08.2009 Czym jest In-Circuit Debugger? Większość procesorów dostarcza systemów debugowania (ang.
RAPORT. Gryfów Śląski
 RAPORT z realizacji projektu Opracowanie i rozwój systemu transportu fluidalnego w obróbce horyzontalnej elementów do układów fotogalwanicznych w zakresie zadań Projekt modelu systemu Projekt automatyki
RAPORT z realizacji projektu Opracowanie i rozwój systemu transportu fluidalnego w obróbce horyzontalnej elementów do układów fotogalwanicznych w zakresie zadań Projekt modelu systemu Projekt automatyki
Spis treści. Dzień 1. I Wprowadzenie do PCS 7 (wersja 1508) II Licencjonowanie (wersja 1508) III Tworzenie projektu w PCS 7 (wersja 1508)
 II Licencjonowanie (wersja 1508) III Tworzenie projektu w PCS 7 (wersja 1508)") Spis treści Dzień 1 I Wprowadzenie do PCS 7 (wersja 1508) I-3 System PLC + SCADA vs. System DCS I-4 Architektura systemu opartego o PLC I-5 Architektura systemu DCS PCS7 I-6 Komponenty systemu PCS7 I-7
Spis treści Dzień 1 I Wprowadzenie do PCS 7 (wersja 1508) I-3 System PLC + SCADA vs. System DCS I-4 Architektura systemu opartego o PLC I-5 Architektura systemu DCS PCS7 I-6 Komponenty systemu PCS7 I-7
AUTOMATYZACJA PROCESU PROJEKTOWANIA RUR GIĘTYCH W OPARCIU O PARAMETRYCZNY SYSTEM CAD
 mgr inż. Przemysław Zawadzki, email: przemyslaw.zawadzki@put.poznan.pl, mgr inż. Maciej Kowalski, email: e-mail: maciejkow@poczta.fm, mgr inż. Radosław Wichniarek, email: radoslaw.wichniarek@put.poznan.pl,
mgr inż. Przemysław Zawadzki, email: przemyslaw.zawadzki@put.poznan.pl, mgr inż. Maciej Kowalski, email: e-mail: maciejkow@poczta.fm, mgr inż. Radosław Wichniarek, email: radoslaw.wichniarek@put.poznan.pl,
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie
 Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Autoreferat Rozprawy Doktorskiej
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: projektowanie systemów mechanicznych Rodzaj zajęd: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU Symulacje
Nazwa przedmiotu: Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: projektowanie systemów mechanicznych Rodzaj zajęd: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU Symulacje
Krótka Historia. Co to jest NetBeans? Historia. NetBeans Platform NetBeans IDE NetBeans Mobility Pack Zintegrowane moduły. Paczki do NetBeans.
 GRZEGORZ FURDYNA Krótka Historia Co to jest NetBeans? Historia Wersje NetBeans Platform NetBeans IDE NetBeans Mobility Pack Zintegrowane moduły NetBeans Profiler Narzędzie do projektowania GUI Edytor NetBeans
GRZEGORZ FURDYNA Krótka Historia Co to jest NetBeans? Historia Wersje NetBeans Platform NetBeans IDE NetBeans Mobility Pack Zintegrowane moduły NetBeans Profiler Narzędzie do projektowania GUI Edytor NetBeans
Configuring and Testing Your Network
 Configuring and Testing Your Network Network Fundamentals Chapter 11 Version 4.0 1 Konfigurowanie i testowanie Twojej sieci Podstawy sieci Rozdział 11 Version 4.0 2 Objectives Define the role of the Internetwork
Configuring and Testing Your Network Network Fundamentals Chapter 11 Version 4.0 1 Konfigurowanie i testowanie Twojej sieci Podstawy sieci Rozdział 11 Version 4.0 2 Objectives Define the role of the Internetwork
Wprowadzenie do metodologii modelowania systemów informacyjnych. Strategia (1) Strategia (2) Etapy Ŝycia systemu informacyjnego
 Strategia (2) Etapy Ŝycia systemu informacyjnego") Etapy Ŝycia systemu informacyjnego Wprowadzenie do metodologii modelowania systemów informacyjnych 1. Strategia 2. Analiza 3. Projektowanie 4. Implementowanie, testowanie i dokumentowanie 5. WdroŜenie
Etapy Ŝycia systemu informacyjnego Wprowadzenie do metodologii modelowania systemów informacyjnych 1. Strategia 2. Analiza 3. Projektowanie 4. Implementowanie, testowanie i dokumentowanie 5. WdroŜenie
ZASTOSOWANIE TECHNOLOGII WIRTUALNEJ RZECZYWISTOŚCI W PROJEKTOWANIU MASZYN
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 37, s. 141-146, Gliwice 2009 ZASTOSOWANIE TECHNOLOGII WIRTUALNEJ RZECZYWISTOŚCI W PROJEKTOWANIU MASZYN KRZYSZTOF HERBUŚ, JERZY ŚWIDER Instytut Automatyzacji Procesów
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 37, s. 141-146, Gliwice 2009 ZASTOSOWANIE TECHNOLOGII WIRTUALNEJ RZECZYWISTOŚCI W PROJEKTOWANIU MASZYN KRZYSZTOF HERBUŚ, JERZY ŚWIDER Instytut Automatyzacji Procesów
DROGA ROZWOJU OD PROJEKTOWANIA 2D DO 3D Z WYKORZYSTANIEM SYSTEMÓW CAD NA POTRZEBY PRZEMYSŁU SAMOCHODOWEGO
 Marta KORDOWSKA, Andrzej KARACZUN, Wojciech MUSIAŁ DROGA ROZWOJU OD PROJEKTOWANIA 2D DO 3D Z WYKORZYSTANIEM SYSTEMÓW CAD NA POTRZEBY PRZEMYSŁU SAMOCHODOWEGO Streszczenie W artykule omówione zostały zintegrowane
Marta KORDOWSKA, Andrzej KARACZUN, Wojciech MUSIAŁ DROGA ROZWOJU OD PROJEKTOWANIA 2D DO 3D Z WYKORZYSTANIEM SYSTEMÓW CAD NA POTRZEBY PRZEMYSŁU SAMOCHODOWEGO Streszczenie W artykule omówione zostały zintegrowane
Środowiska i platformy programistyczne
 Środowiska i platformy programistyczne 1 Rys historyczny lata 80-90: efektywność! Cel: zwiększyć efektywność programisty jedno narzędzie: integracja edytor kodu, funkcje programistyczne (kompilacja, łączenie,
Środowiska i platformy programistyczne 1 Rys historyczny lata 80-90: efektywność! Cel: zwiększyć efektywność programisty jedno narzędzie: integracja edytor kodu, funkcje programistyczne (kompilacja, łączenie,
Współczesna problematyka klasyfikacji Informatyki
 Współczesna problematyka klasyfikacji Informatyki Nazwa pojawiła się na przełomie lat 50-60-tych i przyjęła się na dobre w Europie Jedna z definicji (z Wikipedii): Informatyka dziedzina nauki i techniki
Współczesna problematyka klasyfikacji Informatyki Nazwa pojawiła się na przełomie lat 50-60-tych i przyjęła się na dobre w Europie Jedna z definicji (z Wikipedii): Informatyka dziedzina nauki i techniki
Podstawa rozwiązań sterowania przemysłowego na komputerach PC. Software Controller. siemens.pl/software-controller
 Podstawa rozwiązań sterowania przemysłowego na komputerach PC Software Controller siemens.pl/software-controller SIMATIC S7-1500 Software Controller sterownik programowy z serii SIMATIC oparty na komputerach
Podstawa rozwiązań sterowania przemysłowego na komputerach PC Software Controller siemens.pl/software-controller SIMATIC S7-1500 Software Controller sterownik programowy z serii SIMATIC oparty na komputerach
MentorGraphics ModelSim
 MentorGraphics ModelSim 1. Konfiguracja programu Wszelkie zmiany parametrów systemu symulacji dokonywane są w menu Tools -> Edit Preferences... Wyniki ustawień należy zapisać w skrypcie startowym systemu
MentorGraphics ModelSim 1. Konfiguracja programu Wszelkie zmiany parametrów systemu symulacji dokonywane są w menu Tools -> Edit Preferences... Wyniki ustawień należy zapisać w skrypcie startowym systemu
Ćwiczenia z S7-1200. Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP.
 Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII. Roman Kaula
 POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy. Obowiązkowy Polski VI semestr zimowy
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Wykład 1 Inżynieria Oprogramowania
 Wykład 1 Inżynieria Oprogramowania Wstęp do inżynierii oprogramowania. Cykle rozwoju oprogramowaniaiteracyjno-rozwojowy cykl oprogramowania Autor: Zofia Kruczkiewicz System Informacyjny =Techniczny SI
Wykład 1 Inżynieria Oprogramowania Wstęp do inżynierii oprogramowania. Cykle rozwoju oprogramowaniaiteracyjno-rozwojowy cykl oprogramowania Autor: Zofia Kruczkiewicz System Informacyjny =Techniczny SI
Ćwiczenia z S7-1200. S7-1200 jako Profinet-IO Controller. FAQ Marzec 2012
 Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
dr inż. Tomasz Krzeszowski
 Microsoft Robotics Developer Studio dr inż. Tomasz Krzeszowski 2017-05-20 Spis treści 1 Przygotowanie do laboratorium... 3 2 Cel laboratorium... 3 3 Microsoft Robotics Developer Studio... 3 3.1 Wprowadzenie...
Microsoft Robotics Developer Studio dr inż. Tomasz Krzeszowski 2017-05-20 Spis treści 1 Przygotowanie do laboratorium... 3 2 Cel laboratorium... 3 3 Microsoft Robotics Developer Studio... 3 3.1 Wprowadzenie...
Programowanie Urządzeń Mobilnych. Laboratorium nr 7, 8
 Programowanie Urządzeń Mobilnych Laboratorium nr 7, 8 Android Temat 1 tworzenie i uruchamianie aplikacji z użyciem Android SDK Krzysztof Bruniecki 1 Wstęp Platforma Android jest opartym na Linuxie systemem
Programowanie Urządzeń Mobilnych Laboratorium nr 7, 8 Android Temat 1 tworzenie i uruchamianie aplikacji z użyciem Android SDK Krzysztof Bruniecki 1 Wstęp Platforma Android jest opartym na Linuxie systemem
E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu. Dynamicznych. Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Oprogramowanie komputerowych systemów sterowania
 Budowa i oprogramowanie komputerowych systemów sterowania Wykład 3 Oprogramowanie komputerowych systemów sterowania Wprowadzenie W komputerowych systemach automatyki wyróżnia się dwa ściśle z sobą powiązane
Budowa i oprogramowanie komputerowych systemów sterowania Wykład 3 Oprogramowanie komputerowych systemów sterowania Wprowadzenie W komputerowych systemach automatyki wyróżnia się dwa ściśle z sobą powiązane
Model referencyjny doboru narzędzi Open Source dla zarządzania wymaganiami
 Politechnika Gdańska Wydział Zarządzania i Ekonomii Katedra Zastosowań Informatyki w Zarządzaniu Zakład Zarządzania Technologiami Informatycznymi Model referencyjny Open Source dla dr hab. inż. Cezary
Politechnika Gdańska Wydział Zarządzania i Ekonomii Katedra Zastosowań Informatyki w Zarządzaniu Zakład Zarządzania Technologiami Informatycznymi Model referencyjny Open Source dla dr hab. inż. Cezary
ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES
 RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
RYSZARD DINDORF, PAWEŁ ŁASKI, JAKUB TAKOSHOGLU, PIOTR WOŚ ROZPROSZONY SYSTEM STEROWANIA CZASU RZECZYWISTEGO DO SERWONAPĘDÓW PŁYNOWYCH DISTRIBUTED REAL-TIME CONTROL SYSTEM FOR FLUID POWER SERVO-DRIVES S
Testowanie oprogramowania w środowisku IBM Rational Software Architect
 Testowanie oprogramowania w środowisku IBM Rational Software Architect Software Development 2008 Michał Wolski m.wolski@modesto.pl szkolenia: inżynierii oprogramowania zarządzania projektami usługi doradcze
Testowanie oprogramowania w środowisku IBM Rational Software Architect Software Development 2008 Michał Wolski m.wolski@modesto.pl szkolenia: inżynierii oprogramowania zarządzania projektami usługi doradcze
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: PROJEKTOWANIE SYSTEMÓW INFORMATYCZNYCH I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Podniesienie poziomu wiedzy studentów z inżynierii oprogramowania w zakresie C.
Nazwa przedmiotu: PROJEKTOWANIE SYSTEMÓW INFORMATYCZNYCH I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Podniesienie poziomu wiedzy studentów z inżynierii oprogramowania w zakresie C.
Kurs Wizualizacja z WinCC SCADA - Zaawansowany. Spis treści. Dzień 1. I VBS w WinCC podstawy programowania (zmienne, instrukcje, pętle) (wersja 1410)
 (wersja 1410)") Spis treści Dzień 1 I VBS w WinCC podstawy programowania (zmienne, instrukcje, pętle) (wersja 1410) I-3 VBS w WinCC - Informacje ogólne I-4 Zastosowanie VBS w WinCC Runtime I-5 Wykorzystanie i wydajność
Spis treści Dzień 1 I VBS w WinCC podstawy programowania (zmienne, instrukcje, pętle) (wersja 1410) I-3 VBS w WinCC - Informacje ogólne I-4 Zastosowanie VBS w WinCC Runtime I-5 Wykorzystanie i wydajność
Metody optymalizacji soft-procesorów NIOS
 POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
Tworzenie oprogramowania
 Tworzenie oprogramowania dr inż. Krzysztof Konopko e-mail: k.konopko@pb.edu.pl 1 Tworzenie oprogramowania dla systemów wbudowanych Program wykładu: Tworzenie aplikacji na systemie wbudowanym. Konfiguracja
Tworzenie oprogramowania dr inż. Krzysztof Konopko e-mail: k.konopko@pb.edu.pl 1 Tworzenie oprogramowania dla systemów wbudowanych Program wykładu: Tworzenie aplikacji na systemie wbudowanym. Konfiguracja
Słowa kluczowe: wytwarzanie oprogramowania w oparciu o model, model oprogramowania, generowanie kodu, model V wytwarzania oprogramowania
 Marek BRYKCZYŃSKI 1 Opiekun naukowy: Marcin SIDZINA 2 GENEROWANIE KODU Z MODELU OPROGRAMOWANIA Streszczenie: Przegląd i analiza wybranych narzędzi do rozwoju oprogramowania, które posiadają możliwość generowania
Marek BRYKCZYŃSKI 1 Opiekun naukowy: Marcin SIDZINA 2 GENEROWANIE KODU Z MODELU OPROGRAMOWANIA Streszczenie: Przegląd i analiza wybranych narzędzi do rozwoju oprogramowania, które posiadają możliwość generowania
Modułowy programowalny przekaźnik czasowy firmy Aniro.
 Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Jabil Poland w Kwidzynie poszukuje kandydatów na stanowiska:
 Jabil Poland w Kwidzynie poszukuje kandydatów na stanowiska: INŻYNIER ELEKTRONIK PROJEKTANT ELEKTRONIK - PROGRAMISTA Wdrażanie, utrzymanie i naprawa systemów testujących dla urządzeń elektronicznych Optymalizacja
Jabil Poland w Kwidzynie poszukuje kandydatów na stanowiska: INŻYNIER ELEKTRONIK PROJEKTANT ELEKTRONIK - PROGRAMISTA Wdrażanie, utrzymanie i naprawa systemów testujących dla urządzeń elektronicznych Optymalizacja
III. Przebieg ćwiczenia. 1. Generowanie i wizualizacja przebiegów oraz wyznaczanie ich podstawowych parametrów
 POLITECHNIKA RZESZOWSKA KATEDRA METROLOGII I SYSTEMÓW DIAGNOSTYCZNYCH LABORATORIUM GRAFICZNE ŚRODOWISKA PROGRAMOWANIA S.P. WPROWADZENIE DO UŻYTKOWANIA ŚRODOWISKA VEE (1) I. Cel ćwiczenia Celem ćwiczenia
POLITECHNIKA RZESZOWSKA KATEDRA METROLOGII I SYSTEMÓW DIAGNOSTYCZNYCH LABORATORIUM GRAFICZNE ŚRODOWISKA PROGRAMOWANIA S.P. WPROWADZENIE DO UŻYTKOWANIA ŚRODOWISKA VEE (1) I. Cel ćwiczenia Celem ćwiczenia
Schemat blokowy karty
 Obsługa kart I/O Karta NI USB-6008 posiada: osiem wejść analogowych (AI), dwa wyjścia analogowe (AO), 12 cyfrowych wejść-wyjść (DIO), 32-bitowy licznik. Schemat blokowy karty Podstawowe parametry karty
Obsługa kart I/O Karta NI USB-6008 posiada: osiem wejść analogowych (AI), dwa wyjścia analogowe (AO), 12 cyfrowych wejść-wyjść (DIO), 32-bitowy licznik. Schemat blokowy karty Podstawowe parametry karty
EC4P Pierwszy program w 6 krokach
 EC4P Pierwszy program w 6 krokach Strona - 1 Wymagania / Przygotowanie Instalacja easy Soft CoDeSys Zakłada si, e adna z wersji easysoft CoDeSys nie jest zainstalowana. Podczas instalacji wykonuj poszczególne
EC4P Pierwszy program w 6 krokach Strona - 1 Wymagania / Przygotowanie Instalacja easy Soft CoDeSys Zakłada si, e adna z wersji easysoft CoDeSys nie jest zainstalowana. Podczas instalacji wykonuj poszczególne