Przekształtniki i Magazyny Energii dla Energetyki Odnawialnej
|
|
|
- Janusz Bielecki
- 8 lat temu
- Przeglądów:
Transkrypt
1 Materiały pomocnicze dla słuchaczy Studium Podyplomowego Przekształtniki i Magazyny Energii dla Energetyki Odnawialnej Przedmiot: Laboratorium symulacji komputerowej Prowadzący zajęcia: dr inż. Mariusz Malinowski, dr inż. Bartłomiej Ufnalski Program studiów opracowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego

2 Program przedmiotu: 1. Wiadomości wstępne z programów symulacyjnych Matlab/Simulink i Saber 2. Modele wybranych generatorów 3. Podstawowe topologie przekształtników wykorzystywanych w energetyce odnawialnej 4. Nowoczesne metody sterowania przekształtnikami MSI (Modulacja Szerokości Impulsów) 5. Przegląd podstawowych technik modulacji CZEŚĆ WSTĘPNA 1. Wiadomości wstępne z programów symulacyjnych Matlab/Simulink i Saber SABER umożliwia budowę i symulacje pełnych systemów sterowania wraz z podsystemami elektrycznymi. Przykład modelu elektrowni wiatrowej z generatorem PMSG i układem przetwarzania energii bazującym na trójpoziomowym przekształtniku NPC pokazano na rys Wszystkie elementy elektryczne tj. tranzystory, kondensatory, dławiki i rezystory są przeniesione do modelu z biblioteki elementów Saber poprzez wybranie zakładki zawierającej grupy elementów z kategorii (rys. 1.2): aerospace, automotive, communications, control systems, power systems etc.. Najpopularniejsze elementy energoelektroniczne można odnaleźć w katalogu power systems (rys. 1.3), które po przeniesieniu do modelu mogą być zamknięte w postaci bloku podsystemu (rys. 1.4). Zmiana parametrów odbywa się poprzez dwukrotnie kliknięcie na wybranym elemencie i wprowadzenie zmienionych danych (rys. 1.5). Algorytm sterowania jest napisany w języku MAST, zblizonym do C, i zamknięty w bloku sterowania np. 3 level control. Przykładowy algorytm sterowania DPC zamieszczono na końcu. Symulację przeprowadza sie poprzez wybranie zakładki a następnie, dzięku czemu uzyskamy możliwość ustawienia parametrów symulacji (rys. 1.6). W celu obserwacji wszystkich zmiennych konieczne jest wybranie w zakładce Input/Output dla Signal List / (patrz rys. 1.7)

3 Rys.1.1 Przykład modelu elektrowni wiatrowej z generatorem PMSG i układem przetwarzania energii bazującym na trójpoziomowym przekształtniku NPC Rys.1.2. Dostępne biblioteki

4 Rys.1.3. Wybrano indukcyjność. Jej umieszczenie w modelu nastąpi poprzez wybranie Place Rys.1.4. Grupę elementów można zamknąć w postaci jednego bloku podsystemu. W tym wypadku cały przekształtnik trójpoziomowy NPC został umieszczony w bloku

5 Rys.1.5. Zmiana parametrów dławika Rys.1.6. Ustawienie parametrów symulacji

6 Rys.1.7. Wybranie opcji umożliwiającej obserwację wszystkich zmiennych układu #******************************************************************************# #* Direct Power Control for Saber *# #******************************************************************************# element template dpc_udc smp,ia,ib,sa_out,sb_out,sc_out,sa_out_i,sb_out_i,sc_out_i,vaz,vbz,vcz,udc_z state nu smp,ia,ib,udc_z,vaz,vbz,vcz state logic_4 Sa_out,Sb_out,Sc_out,Sa_out_i,Sb_out_i,Sc_out_i { <consts.sin state nu ic,ialf,ibet,l.013,hh=1,kp.0,ti.0,pi=math_pi,t_in.1, Ts=10u state nu Theta,delta_Udc,p,q,delta_q,delta_p,p_old,q_old, I_ref_old, delta_udc_old state nu i,sq,sq_old,sp,sp_old,sector,udc_ref=610,p_ref,q_ref,pdc=1 state nu ui,up,i_ref,ie,sa,sb,sc,sa_old,sb_old,sc_old state nu Psi_alf,Psi_bet, usa, usb, usc, Psi_alf_s=-1.0, Psi_bet_s.0, Psi_alf_c, Psi_bet_c number pi_r.7,ti_r=5m state nu tab_11[1:12]=[1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0] state nu tab_12[1:12]=[0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0] state nu tab_13[1:12]=[1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1] state nu tab_21[1:12]=[1, 1, 0, 0, 0, 1, 0, 0, 1, 1, 1, 0] state nu tab_22[1:12]=[1, 1, 1, 0, 1, 1, 0, 0, 0, 1, 0, 0] state nu tab_23[1:12]=[0, 1, 0, 0, 1, 1, 1, 0, 1, 1, 0, 0] state nu tab_31[1:12]=[1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 1] state nu tab_32[1:12]=[0, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 0] state nu tab_33[1:12]=[1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1] state nu tab_41[1:12]=[1, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1] state nu tab_42[1:12]=[0, 1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0] state nu tab_43[1:12]=[0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 0] when(time_init){ schedule_event(time,sa_out,l4_0) schedule_event(time,sa_out_i,l4_0) schedule_event(time,sb_out,l4_0) schedule_event(time,sb_out_i,l4_0) schedule_event(time,sc_out,l4_0) schedule_event(time,sc_out_i,l4_0) } when(event_on(smp)){ #*Transformacje wspolrzednych

7 ic=-(ia+ib) ialf=ia ibet=(1/sqrt(3))*(ia+2*ib) usa=1.0/3.0*udc_z*(2.0*sa_old-sb_old-sc_old); usb=1.0/3.0*udc_z*(-sa_old+2.0*sb_old-sc_old); usc=1.0/3.0*udc_z*(-sa_old-sb_old+2.0*sc_old); Ualf=usa; Ubet=(1/sqrt(3))*(usa+2.0*usb); #*"ic" calculation #*abc/alfa_beta transformation #*Virtual flux estimation Psi_alf_c=Psi_alf_s+Ts*(Ualf-(1/T_in)*Psi_alf_c) Psi_alf_s=Psi_alf_c Psi_alf=Psi_alf_c+ialf*L Psi_bet_c=Psi_bet_s+Ts*(Ubet-(1/T_in)*Psi_bet_c) Psi_bet_s=Psi_bet_c Psi_bet=Psi_bet_c+ibet*L p= 3/2*314*(Psi_alf*ibet - Psi_bet*ialf) q= 314*(Psi_alf*ialf + Psi_bet*ibet) #*Instantaneous power estimation if(psi_alf<0 & Psi_bet>0) Theta = atan(psi_bet/( Psi_alf p))+math_pi else if(psi_alf<0 & Psi_bet< 0) Theta = atan(psi_bet/( Psi_alf p))-math_pi else Theta=atan(Psi_bet/( Psi_alf p)) #*Sector selection if ((0 <= Theta) &(Theta < pi/6)) sector = 2 #* 0 <= Theta < 30 *# if ((pi/6 <= Theta) &(Theta < pi/3)) sector = 3 #* 30 <= Theta < 60 *# if ((pi/3 <= Theta) &(Theta < pi/2)) sector = 4 #* 60 <= Theta < 90 *# if ((pi/2 <= Theta) &(Theta < 2*pi/3)) sector = 5 #* 90 <= Theta < 120*# if ((2*pi/3 <= Theta) & (Theta < 5*pi/6)) sector = 6 #*120 <= Theta < 150*# if ((5*pi/6 <= Theta) & (Theta <= pi)) sector = 7 #*150 <= Theta < 180*# if ((-pi <= Theta) &(Theta < -5*pi/6)) sector = 8 #*180 <= Theta < 210*# if ((-5*pi/6 <= Theta) & (Theta < -2*pi/3)) sector = 9 #*210 <= Theta < 240*# if ((-2*pi/3 <= Theta) & (Theta < -pi/2)) sector = 10 #*240 <= Theta < 270*# if ((-pi/2 <= Theta) &(Theta < -pi/3)) sector = 11 #*270 <= Theta < 300*# if ((-pi/3 <= Theta) &(Theta < -pi/6)) sector = 12 #*300 <= Theta < 330*# if ((-pi/6 <= Theta) &(Theta < 0)) sector = 1 #*330 <= Theta < 360*# delta_udc=udc_ref-udc_z #*voltage control I_ref= I_ref_old + pi_r*delta_udc + pi_r*((ts/ti_r)-1)*delta_udc_old #* regulator PI p_ref=i_ref*udc_z I_ref_old=I_ref delta_udc_old=delta_udc #* Control Structure delta_p=p_ref-p delta_q=q_ref-q #****************************************************************************# if (delta_p>hh) Sp = 1 #* p histeres *# if (delta_p<(-hh)) Sp = 0 if ((delta_p<hh) &(delta_p>(-hh))) Sp=Sp_old Sp_old=Sp #*************************************************************************# if (delta_q>hh) Sq = 1 #* q histeres *# if (delta_q<(-hh)) Sq = 0 if ((delta_q<hh) &(delta_q>(-hh))) Sq=Sq_old Sq_old=Sq #*************************************************************************# if((sp==1) &(Sq=)){ Sa=tab_11[sector], Sb=tab_12[sector], Sc=tab_13[sector] } if((sp==1) &(Sq==1)){ Sa=tab_21[sector], Sb=tab_22[sector], Sc=tab_23[sector] } if((sp=) &(Sq=)){ Sa=tab_31[sector], Sb=tab_32[sector], Sc=tab_33[sector] } if((sp=) &(Sq==1)){ Sa=tab_41[sector], Sb=tab_42[sector], Sc=tab_43[sector] } Sa_old=Sa Sb_old=Sb
*Psi_bet_c) Psi_bet_s=Psi_bet_c Psi_bet=Psi_bet_c+ibet*L p= 3/2*314*(Psi_alf*ibet - Psi_bet*ialf) q= 314*(Psi_alf*ialf + Psi_bet*ibet) #*Instantaneous power")
8 Sc_old=Sc #*************************************************************************# if(sa=){ schedule_event(time+ts,sa_out,l4_0) schedule_event(time+ts,sa_out_i,l4_1) } if(sa==1){ schedule_event(time+ts,sa_out,l4_1) schedule_event(time+ts,sa_out_i,l4_0) } if(sb=){ schedule_event(time+ts,sb_out,l4_0) schedule_event(time+ts,sb_out_i,l4_1) } if(sb==1){ schedule_event(time+ts,sb_out,l4_1) schedule_event(time+ts,sb_out_i,l4_0) } if(sc=){ schedule_event(time+ts,sc_out,l4_0) schedule_event(time+ts,sc_out_i,l4_1) } if(sc==1){ schedule_event(time+ts,sc_out,l4_1) schedule_event(time+ts,sc_out_i,l4_0) } schedule_next_time(time) } } Środowisko Matlab/SIMULINK należy do grupy tzw. narzędzi szybkiego prototypowania układów regulacji. Typowe narzędzie szybkiego prototypowania układów regulacji pozwala na: - zamodelowanie obiektu regulacji wraz z regulatorem, - przeprowadzenie badań symulacyjnych obiektu i regulatora w celu weryfikacji struktury regulacji, - pracę w interfejsie przyjaznym użytkownikowi (interfejs graficzny, drag n drop), - automatyczne generowanie kodu (zazwyczaj kodu C, C++ lub VHDL) pod docelową platformę czasu rzeczywistego (procesor sygnałowy DSP, mikrokontroler DSC, matryca programowalna FPGA), - testowanie skompilowanego kodu regulatora w symulatorze, - debugowanie kodu po jego załadowaniu na platformę docelową (DSP/DSC/FPGA ), - łatwą budowę wirtualnego panelu sterowania, wirtualnego panelu nadzoru nad eksperymentem (HMI, interfejs pomiędzy użytkownikiem i maszyną). Środowisko Matlab oferuje własny język skryptowy zwany językiem M (M-code). Pod wieloma względami podobny jest on do języka C, przy czym jest od niego bardziej intuicyjny. Przykładowo, w języku M nie ma potrzeby deklarowania zmiennych rodzaj zmiennej jest dobierany przez interpreter na podstawie wyrażenia po prawej stronie znaku równości (znaku przypisania wartości). Środowisko SIMULINK jest graficznym interfejsem dla Matlaba. Zawiera ono bogaty zbiór bloków funkcyjnych pogrupowanych tematycznie w toolbox y. Pozwala na bardzo intuicyjne budowanie modelu metodą drag n drop. Dodatkowo istnieje możliwość doinstalowywania toolbox ów
 schedule_event(time+ts,sc_out_i,l4_0) } schedule_next_time(time) } } Środowisko Matlab/SIMULINK należy do grupy tzw.")
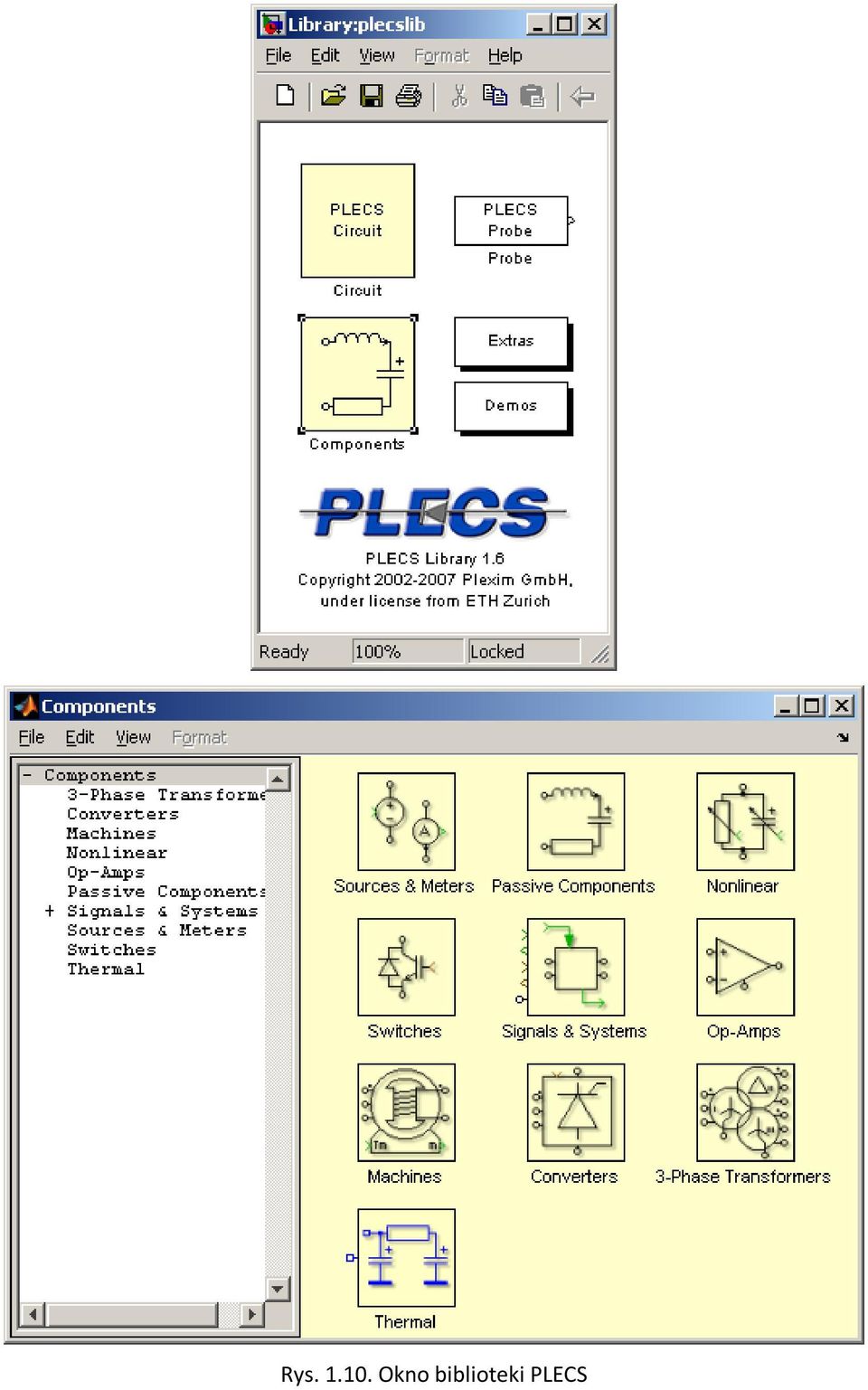
9 tworzonych przez szeroką rzeszę użytkowników (w tym komercyjnych producentów oprogramowania). W naszym przypadku będzie to toolbox PLECS firmy PLEXIM, dedykowany modelowaniu przekształtników energoelektronicznych. Na rysunkach przedstawiono przykładowe okna edytorów. Rys Główne okno Matlaba (command line)

10 Rys Okno nawigatora po bibliotekach SIMULINKa


11 Rys Okno biblioteki PLECS


12 Rys Okno edytora M-plików Rys Okno edytora C-plików (S-Function Builder)

13 Bardzo przydatnym, szczególnie dla początkującego użytkownika, jest obszerny moduł pomocy zintegrowany ze wszystkimi edytorami. Aby np. uzyskać pomoc w głównym oknie Matlaba na temat funkcji realizującej szybką transformatę Fouriera, wystarczy w wierszu poleceń wpisać help fft (Rys. 1.13). Możemy też skorzystać z przeglądarki funkcji (Shift F1) (Rys. 1.14). Dostępny jest również nawigator po plikach pomocy dla wszystkich składników środowiska z możliwością wyszukiwania po słowach kluczowych (Rys. 1.15). Dodatkowo każdy bloczek SIMULINKowy posiada przycisk [Help] (Rys. 1.16) odsyłający nas automatycznie do odpowiedniego miejsca w dokumentacji elektronicznej. Aktywny jest również dobrze dopracowany system powiadamiania o błędach. System ten ostrzega o możliwych błędach zarówno w edytorze M-plików (Rys, 1.17), jak i w symulatorze SIMULINK. Zachęcam do starannego czytania tych komunikatów zazwyczaj są one bardzo rzeczowe i pozwalają na szybkie usunięcie popełnionego błędu. Rys System pomocy uruchamiany w wierszu poleceń
.")
14 Rys Przeglądarka funkcji Rys Moduł pomocy (elektroniczna wersja wielotomowego podręcznika użytkownika)

![Rys. 1.16. Maska bloku funkcyjnego z przyciskiem [Help] Rys. 1.17. Przykład zadziałania systemu powiadamiania o błędach 2. Modele wybranych generatorów 2.](/docs-images/27/11889795/images/15-0.png "1 Wstęp Zauważmy, że opis matematyczny (model matematyczny) generatora nie różni się niczym od opisu matematycznego silnika napędowego.")
15 Rys Maska bloku funkcyjnego z przyciskiem [Help] Rys Przykład zadziałania systemu powiadamiania o błędach 2. Modele wybranych generatorów 2.1 Wstęp Zauważmy, że opis matematyczny (model matematyczny) generatora nie różni się niczym od opisu matematycznego silnika napędowego. Rozróżnienie, silnik napędowy czy generator, odnosi się przede wszystkim do dominującego kierunku przepływu energii. Podczas tego ćwiczenia zajmiemy się modelowaniem wybranych maszyn pozwalających na przekształcanie energii elektrycznej na

16 mechaniczną (praca silnikowa) i mechanicznej na elektryczną (praca generatorowa). Przedstawione i omówione zostaną modele następujących maszyn: - silnik/generator prądu stałego (obcowzbudny lub z magnesami trwałymi), - silnik/generator asynchroniczny (klatkowy lub pierścieniowy), - silnik/generator synchroniczny (maszyna PMSM). 2.2 Model maszyny prądu stałego Zakładając, że przepływ prądu w obwodzie tworniku nie powoduje osłabienia pola (czyli pomijając oddziaływanie obwodu twornika na obwód wzbudzenia), otrzymujemy: d ua ( t) = Raia ( t) + La ia ( t) + ε a ( t) dt ε ( t) = ψ ω ( t) a m M ( t) = ψ i ( t) e ε M a d M e( t) M o ( t) = J ωm( t) dt gdzie: u a, i a - napięcie i prąd twornika R a, L a - rezystancja i indukcyjność obwodu twornika ε a - siła elektromotoryczna (SEM) ψ ε - stała napięciowa (strumień biorący udział w produkcji SEM) ω m - prędkość kątowa wirnika M e - moment elektromagnetyczny wytwarzany w maszynie ψ M - stała momentowa (strumień biorący udział w wytwarzaniu momentu elektromagnetycznego, w modelu idealnej maszyny równy ψ ε ) M o - moment obciążenia J - moment bezwładności sprowadzony do wirnika Wprowadzone oznaczenia nie maja charakteru uniwersalnego. Nawet w obrębie narzędzi SIMULINK/PLECS spotkamy kilka wersji tych oznaczeń. Przed ustawieniem parametrów na masce modelu bibliotecznego należy bezwzględnie przeczytać dokumentację do tego bloku.
, otrzymujemy: d ua (")
17 Rys Model obwodowy maszyny DC z biblioteki PLECS Rys Model obwodowy maszyny DC z biblioteki SimPowerSystems

18 Dodatkowo w trakcie trwania ćwiczenia uczestnicy samodzielnie będą budowali model sygnałowy maszyny prądu stałego. 2.3 Model maszyny asynchronicznej Po pewnych uproszczeniach (związanych z pominięciem wpływu anizotropii, nasycenia magnetycznego, zjawisk histerezy, prądów wirowych, wyższych harmonicznych przestrzennego rozkładu pola w szczelinie powietrznej, koncentracji uzwojeń), symetryczny trójfazowy silnik klatkowy można opisać, w wirującym układzie współrzędnych prostokątnych xy, równaniami: d u s = Rsis + ψ + jω s kψ s dt d u r = Rr ir + ψ + j( ωk pbωm ) ψ r r dt ψ = L i + L i s r s r s r 3 M e = pb ( ψ i s) s 2 d 1 ωm = ( M e M o ) dt J m ψ = L i + L i m r s gdzie: u s, u r, i s, i r - wektory przestrzenne napięć i prądów stojana oraz wirnika (dla maszyny klatkowej u r = 0) ψ, s ψ - wektory przestrzenne strumieni stojana i wirnika r R s, R r, L s, L r, L m - odpowiednio rezystancje i indukcyjności stojana i wirnika oraz indukcyjność główna (magnesowania) ω m - prędkość kątowa wirnika M e - moment elektromagnetyczny wytwarzany w maszynie M o - moment obciążenia J - moment bezwładności sprowadzony do wirnika p b - liczba par biegunów ω k - prędkość wirowania układu współrzędnych
 ψ r r dt ψ = L i + L i s r s r s r 3 M e = pb ( ψ i s) s 2 d 1 ωm = ( M e M o ) dt J m ψ = L i + L i m r s gdzie: u s, u r, i s, i r -")

19 Rys Model obwodowy maszyny asynchronicznej z biblioteki PLECS Rys Model obwodowy maszyny asynchronicznej z biblioteki SimPowerSystems

20 Dodatkowo w trakcie trwania ćwiczenia uczestnicy samodzielnie będą uzupełniali model sygnałowy maszyny asynchronicznej. 2.4 Model maszyny synchronicznej Po pewnych uproszczeniach maszynę synchroniczną o magnesach trwałych i sinusoidalnym rozkładzie SEM można opisać, w wirującym układzie współrzędnych prostokątnych dq związanym z wirnikiem, równaniami: d ud = Rsid + ψ d pbωmψ q dt d uq = Rsiq + ψ q + pbωmψ d dt Dla maszyny z magnesami rozłożonymi na powierzchni wirnika można przyjąć symetrię obwodu magnetycznego i zapisać Lsd = Lsq = Ls W konsekwencji równania wiążące strumienie i prądy przyjmują postać ψ = L i + ψ d s d f ψ = L i q s q Moment elektromagnetyczny można określić z przybliżonej zależności 3 M = p ψ i 2 e b f q gdzie: ψ f - strumień od magnesów trwałych. Równanie dynamiki ruchu obrotowego wirnika identyczne jak w przypadku wcześniej omawianych maszyn: d J M M dt ω = m e o


21 Rys Model obwodowy maszyny synchronicznej PMSM z biblioteki PLECS Rys Model obwodowy maszyny synchronicznej PMSM z biblioteki SimPowerSystems
22 W trakcie ćwiczenia uczestnicy będą uzupełniali model sygnałowy maszyny synchronicznej PMSM. 3. Podstawowe topologie przekształtników wykorzystywanych w energetyce odnawialnej 3.1 Wstęp Budowa efektywnego systemu energetyki odnawialnej wymaga zastosowania przekształtników energoelektronicznych pozwalających na kontrolowanie przepływów energii z jednoczesną możliwością wpływania na jakość pobieranej/dostarczanej energii (poprzez odpowiednie kształtowanie fali prądu). Wytwarzane obecnie elementy półprzewodnikowe oraz moce obliczeniowe dostępnych procesorów sygnałowych i układów programowalnych FPGA, pozwalają na budowę efektywnych przekształtników potrzebnych do sprzęgania ze sobą sieci energetycznej, źródeł energii odnawialnej, magazynów energii i odbiorników energii. Z uwagi na dużą różnorodność stosowanych przekształtników, w ramach laboratorium przedstawiona zostanie topologia i zasada sterowania wybranego przekształtnika z rodziny układów AC/DC, DC/DC i DC/AC (po jednym z każdej rodziny). Jednym z częściej stosowanych przekształtników jest trójgałęziowy przekształtnik tranzystorowy, który w zależności od rodzaju układu regulacji może pracować jako prostownik sterowany (AC/DC) lub przekształtnik napędowy (falownik)(dc/ac). W systemach potrzebne jest również przetwarzanie AC/AC. Jest ono zazwyczaj realizowane dwustopniowo (AC/DC/AC). W wybranych aplikacjach stosuje się obecnie również przetwarzanie bezpośrednie AC/AC przy użyciu przekształtników matrycowych. Model trójfazowego tranzystorowego prostownika sterowanego (wraz z modelem źródła i odbiornika) przedstawiono na Rys. 3.1.
 ma identyczna strukturę jak trójgałęziowy falownik (przekształtnik DC/AC).")
23 Rys Topologia trójfazowego tranzystorowego prostownika sterowanego Na Rys przedstawiono topologię przekształtnika AC/DC/AC. Zauważmy, że tranzystorowy trójgałęziowy prostownik sterowany (przekształtnik AC/DC) ma identyczna strukturę jak trójgałęziowy falownik (przekształtnik DC/AC). Tak naprawdę przypisanie tym przekształtnikom nazw prostownik i falownik jest umowne i dotyczy tylko jednego trybu pracy układu, czyli pobierania energii z sieci. Szereg układów dopuszcza przeciwny kierunek przepływu energii (np. hamowanie odzyskowe ze zwrotem energii do sieci) lub wręcz zakłada, że podstawowy kierunek przepływu energii będzie przeciwny (siłownia wiatrowa lub wodna). Rozważmy napęd z hamowaniem odzyskowym. Podczas hamowania (pracy generatorowej napędu) przekształtnik po stronie silnika napędowego zaczyna pracować w trybie prostownikowym (sterowanego przekształtnika AC/DC), a przekształtnik po stronie sieci pracuje w trybie falownikowym (przekształtnik DC/AC). Oba te przekształtniki mają za zadanie kontrolowanie prądu poprzez odpowiednie formowanie napięcia, przy czym przekształtnik po stronie maszyny napędowej ma układ regulacji zaprojektowany do kontrolowania prądu silnika z nadrzędnym układem regulacji prędkości, natomiast przekształtnik po stronie sieci ma układ zaprojektowany do kontroli prądu sieci z nadrzędnym regulatorem napięcia obwodu pośredniczącego.

24 Rys Topologia przekształtnika AC/DC/AC W układach energetyki odnawialnej zachodzi często konieczność przetwarzania DC/DC z kontrolą przepływu prądu pomiędzy dwoma źródłami DC (z możliwością odwrócenia naturalnego kierunku przepływu energii od źródła o wyższym napięciu do źródła o niższym napięciu na przeciwny, czyli od źródła o niższym napięciu do źródła o wyższym napięciu). Topologię przekształtnika DC/DC umożliwiającego realizację tego zadania przedstawia Rys Przekształtnik taki możemy zastosować po stronie wybranych magazynów energii (np. akumulatorowego magazynu energii, czy superkondensatorowego magazynu energii). Przekształtnik taki może pracować w trybie step-up (tryb podwyższający napięcie, np. pobieranie energii z magazynu o niższym napięciu niż napięcie na szynie DC) lub step-down (tryb obniżający napięcie, np. ładowanie magazynu energii). Przykładową strukturę układu regulacji mogącego pracować w trybie step-up lub step-down przedstawia Rys Rys Topologia przykładowego przekształtnika step-up/step-down
25 Rys Przykładowa struktura układu regulacji dla przekształtnika step-up/step-down W ramach samodzielnych działań, uczestnicy laboratorium będą budowali model układu regulacji dla przekształtnika step-up lub step-down. 4. Nowoczesne metody sterowania przekształtnikami MSI 4.1 Wstęp Na przestrzeni ostatnich lat dokonał się znaczący postęp w trójfazowych przekształtnikach MSI stosowanymi w układach energetyki odnawialnej. Jest to związane z rozwojem technologii elementów półprzewodnikowych co umożliwiło osiągnięcie wyższych częstotliwości przełączeń, minimalizację ich wymiarów i kosztów zakupu oraz większe wartości prądów i napięć. Ważnym aspektem okazał się również dynamiczny rozwój procesorów sygnałowych i układów programowalnych FPGA co umożliwiło implementację złożonych algorytmów sterowania. Nowe metody sterowania poprawiły parametry i sprawność przekształtników MSI przy jednoczesnej redukcji wykorzystywanych elementów pasywnych. Metody sterowania przekształtnikami MSI dla energetyki odnawialnej można podzielić na dwie grupy. Pierwszą z nich stanowią metody zorientowane względem przestrzennego wektora napięcia linii zasilającej, do których należą VOC (ang. Voltage Oriented Control) oraz DPC (ang. Direct Power Control). Druga grupa określa metody zorientowane względem wirtualnego wektora
26 strumienia linii zasilającej do których należą: VFOC (ang. Virtual Flux Oriented Control), VF-DPC (ang. Virtual Flux - Direct Power Control) oraz DPC-SVM (ang. Direct Power Control Space Vector Modulated). W rozdziale zostaną szczegółowo opisane tylko metody VOC, VF- DPC oraz DPC SVM ze względu na powszechność ich stosowania. Rys. 4.1 Klasyfikacja metod sterowania dla trójfazowych przekształtników sieciowych MSI 4.2 VOC (ang. Voltage Oriented Control) Sterowanie VOC jest znaną i rozpowszechnioną metodą pośredniej regulacji mocą czynną i bierną. Metoda ta charakteryzuje się dużą dynamiką i wydajnością pracy dzięki wewnętrznym pętlom regulacji prądów. Podstawowym założeniem przyjętym w metodzie jest utrzymanie stałej wartości napięcia stałego w obwodzie pośredniczącym na zadanym poziomie oraz uzyskanie sinusoidalnego kształtu prądu przekształtnika MSI. W takich warunkach osiągany współczynnik mocy jest bliski jedności. Aby spełnić powyższe warunki, wektor prądu linii musi się pokrywać (lub być przesunięty o 180st) z wektorem napięcia linii zasilającej (rys. 4.2). W metodzie VOC, obracający się układ współrzędnych jest skojarzony z wektorem napięcia linii zasilającej, wskutek czego zadawana składowa bierna prądu wynosi zero dla współczynnika mocy równego jedności.
27 Rys Wykres wektorowy sterowania VOC (stacjonarny układ współrzędnych α-β, wirujący układ współrzędnych d-q) i = i + ji...(4.1) L Ld Lq u = u + ju...(4.2) L Ld Lq W metodzie VOC wykorzystywane są dwa układy współrzędnych: stacjonarny układ współrzędnych α-β oraz wirujący układ współrzędnych d-q. Sygnały w naturalnym, trójfazowym układzie współrzędnych abc są transformowane do stacjonarnego układu współrzędnych α-β i następnie do wirującego układu współrzędnych d-q. Dzięki temu możliwa jest operacja na sygnałach stałych i zastosowanie regulatorów PI który zapewnia minimalizację uchybu w stanie ustalonym. W wirującym układzie współrzędnych d-q wektor prądu linii jest podzielony na dwie składowe: L [ i i ] i =... (4.3) Ld Lq Składowa i Lq odpowiada za moc bierną, natomiast i Ld określa przepływ mocy czynnej. Ogólne równania napięciowe przyjmuje następującą postać: u u Ld Lq i = R i Ld Lq + d L dt i i Ld Lq i u Lq Sd + ω L +...(4.4) ild usq Przy założeniu, że składowa q jest równa zero oraz wartość rezystancji R jest pomijalnie mała, powyższe równania można zapisać odpowiednio:
28 di = usd...(4.5) dt Ld u Ld L + 0 = u ω L...(4.6) Sq i Ld Ogólny schemat sterowania VOC przedstawiono na rys 4.3. Wartość zadana składowej prądu linii i d_ref, odpowiedzialna za moc czynną, jest kontrolowana przez zewnętrzny regulator PI znajdujący się w pętli regulacji napięcia w obwodzie pośredniczącym DC. Następnie i d_ref jest porównane z wartością zmierzoną i d, a i q_ref z i q w celu uzyskania jednostkowego współczynnika mocy. Na wyjściu regulatorów otrzymujemy zadane wartości napięć dla przekształtnika MSI, które po transformacji z wirującego układu współrzędnych d-q do stacjonarnego układu α-β są podawane na modulator wektorowy, który steruje łącznikami przekształtnika MSI. Rys. 4.3 Schemat blokowy algorytmu sterowania VOC
29 4.3 VF-DPC (ang. Virtual Flux - Direct Power Control) Schemat blokowy układu sterowania VF-DPC przedstawiono na rys Wartości zadane chwilowej mocy biernej q ref (równa zero ze względu na potrzebę uzyskania jednostkowego współczynnika mocy) oraz chwilowej mocy czynnej p ref są porównane z wartościami wyliczonymi q i p według następujących wzorów: p = ω ( Ψ i Ψ i ) α (4.7) Lα Lβ Lβ L q = ω Ψ i + Ψ i ) (4.8) ( Lα Lα Lβ Lβ gdzie wirtualny strumień jest obliczony na podstawie wzorów: Ψ Ψ Lα Lβ = ( ) dt + U Li... (4.9) α = ( ) dt + β Lα U Li... (4.10) Lβ Następnie sygnały są doprowadzone do regulatorów histerezowych mocy czynnej i biernej, skąd zmienne d p, d q wraz położeniem wektora wirtualnego strumienia γ ΨL = arc tg (ψ Lα /ψ Lβ ) są sygnałami wejściowymi dla tabeli łączeniowej wybierającej optymalne załączenia tranzystorów w przekształtniku MSI.
30 Rys. 4.4 Schemat blokowy algorytmu sterowania VF-DPC 4.4 DPC SVM (ang. Direct Power Control Space Vector Modulated) Metoda ta bazująca na bezpośrednim sterowaniu mocą pozwala również na regulację wartości chwilowych mocy czynnej i biernej. Pierwotny algorytm VF - DPC został ulepszony poprzez dodanie regulatorów PI i zastosowanie modulatora wektorowego. Dzięki zastosowaniu modulatora, uzyskujemy stałą częstotliwość łączeń i co za tym idzie, minimalizację filtra wejściowego L lub LCL. Rys. 4.5 przedstawia zależności wektorowe występujące w DPC-SVM:
31 Rys Wykres wektorowy algorytmu sterowania VF-DPC oprac. własne na podstawie [1] W celu wyznaczenia składowych wartości wirtualnego strumienia w stacjonarnym układzie współrzędnych α-β, konieczna jest znajomość parametrów: prądy mierzone w układzie α-β, napięcie w obwodzie pośredniczącym, stany łączników podawanych przez modulator lub wartość składowych napięcia podawanego na modulator w układzie α-β oraz indukcyjność dławika. Równania określające składowe wirtualnego strumienia w układzie α-β: Ψ Lα 2 1 = ( ) U DC Da Db + Dc dt + Li 3 2 Lα... (4.11) lub Ψ Lβ 1 = U DC ( Db Dc ) dt + Li 2 Lβ... (4.12) Ψ Ψ Lα Lβ = ( U ) dt + Li... (4.13) α = ( ) dt + β Lα U Li... (4.14) Lβ Dla sinusoidalnego i zbalansowanego napięcia linii, wartości chwilowe mocy czynnej i biernej wynoszą odpowiednio:
32 ( Ψ i Ψ i ) p = ω... (4.15) Lα Lβ Lβ Lα ( Ψ i + Ψ i ) q = ω... (4.16) Lα Lα Lβ Lβ Obliczone wartości mocy czynnej i biernej w wirującym układzie współrzędnych d-q są porównywane z wartościami zadanymi. Wartość mocy czynnej jest wyznaczana na wyjściu regulatora PI znajdującego się w pętli regulacji w obwodzie pośredniczącym. Zadaniem tego regulatora jest utrzymanie stałej wartości napięcia stałego na zadanym poziomie. Uchyby otrzymane w wyniku porównania są następnie podawane na regulatory PI. Sygnały wyjściowe z regulatorów są transformowane do układu α-β i podawane na modulator wektorowy, który wyznacza sygnały sterujące łącznikami przekształtnikami. Rys. 31 Schemat blokowy DPC-SVM
33 Transformacja między układem współrzędnych d-q a układem α-β jest określona zależnością: u u Sα Sβ sin γψ L = cosγψ L cosγ sin γ ψ ψ L L u u Sd Sq... (4.17) gdzie sin γ ψ L i cos γ ψ L są określane jako: sin γ ψ L Lβ =... (4.18) ( ψ ) 2 + ( ψ ) 2 Lα ψ Lβ cosγ Lα ψ = (4.19) L ( ψ ) 2 + ( ψ ) 2 Lα ψ Lβ
34 5. Przegląd podstawowych technik modulacji Wraz z rozwojem energoelektroniki rozwijały się również metody modulacji szerokości impulsów, od modulacji analogowej z sygnałem nośnej pracującej oddzielnie dla każdej fazy przekształtnika, do modulacji wektora przestrzennego napięcia (SVM ang. Space Vector Modulation) która wykorzystuje zależności pomiędzy fazami przekształtnika i upraszcza przekształcenia, gdyż operujemy tylko jedną wielkością dla wszystkich faz przekształtnika. Dodatkowym atutem modulacji wektora przestrzennego jest możliwość zwiększenia liniowego zakresu pracy modulatora. Dzieje się to poprzez wprowadzenie do napięcia sygnału trzeciej harmonicznej, która nie powoduje przepływu prądu w symetrycznym obciążeniu a zwiększa zakres liniowej pracy modulatora. Następnym krokiem w rozwoju modulacji wektora przestrzennego napięcia było wprowadzenie modulacji w dwóch fazach (DPWM ang. Discontinoous Pulse Width Modulation), polega ona na odpowiednim wykorzystaniu tylko jednego wektora zerowego w czasie samplingu. Ogranicza to straty łączeniowe i nie ma wpływu na kształt prądów i napięć fazowych. W doborze metody modulacji należy wziąć pod uwagę następujące czynniki: Wymagany zakres pracy liniowej modulatora. Ograniczenia strat łączeniowych. Wymagane ograniczenia dotyczące zawartości wyższych harmonicznych sygnału wyjściowego. Żadna z wymienionych metod nie zapewnia spełnienia wszystkich czterech powyższych warunków, dlatego rozwój technik modulacji jest ukierunkowany na jak największe zaspokojenie wymienionych wymagań.
35 5.1 Sinusoidalna modulacja analogowa z sygnałem nośnej. Klasyczną metodą modulacji jest modulacja analogowa z sygnałem nośnej (ang. carrier). Polega ona na porównaniu sygnałów napięć zadanych (Ua, Ub, Uc) z trójkątnym sygnałem nośnej i wygenerowaniu impulsów sterujących tranzystorami (rys.5. 1). U A D_R t t Rys.5.1. Porównanie sygnału zadanego z nośną i odzwierciedlenie w postaci sygnału PWM dla jednej fazy U* a U* b U* c D_R D_S D_T U DC Nośna (carrier) Silnik indukcyjny Rys.5.2. Schemat działania modulatora z sygnałem nośnej. Zakres liniowej pracy modulatora sinusoidalnego jest ograniczony ze względu na amplitudę nośnej i zadanego napięcia. Możemy stosować tę metodę wówczas gdy amplituda nośnej jest większa od amplitudy napięcia zadanego (współczynnik modulacji nie przekracza
36 0.785 (M<π/4)). W przypadku nie spełnienia tego warunku można zwiększyć zakres liniowej pracy modulatora poprzez dodanie sygnału kolejności zerowej. Sygnał kolejności zerowej jest to trzecia harmoniczna napięcia zadanego, dla wszystkich trzech faz identyczna więc dla układu pozbawionego przewodu neutralnego nie powoduje przepływu prądu (rys. 5.3). Wyróżniamy kilka metod dodawania sygnału kolejności zerowej w zależności od kształtu (rys ). U* A U* B U* C + U* a + + U* b + + U* c D_R D_S D_T U DC Obliczenia sygnalu kolejnosci zerowej Nośna (carrier) Silnik indukcyjny Rys.5.3. Zasada działania modulatora z dodatkowym sygnałem kolejności zerowej. U d /2 10 U an =U a0 5 0 U N 0-5 -U d / Rys.5.4. Sygnał zadany w klasycznej modulacji analogowej.
37 U d /2 10 U an 5 U a0 0-5 U N0 -U d / Rys.5.5. Sygnał zadany z dodaną trzecią harmoniczną. U d /2 10 U an 5 U a0 0 U N0-5 -U d / Rys.5.6. Sygnał zadany z dodanym sygnałem kolejności zerowej w kształcie trójkąta.
38 U d /2 10 U a0 U an 5 0 U N0-5 -U d / Rys.5.7. Sygnał zadany z dodanym sygnałem kolejności zerowej quasi-prostokątnym Modulacja wektora przestrzennego. Modulacja wektora przestrzennego (SVM) stała się bardzo popularna ze względu na swoją prostotę. W dwupoziomowym falowniku napięcia istnieje osiem możliwych stanów załączeń sześć aktywnych ( U 1... U 6 ) i dwa zerowe ( U, U 0 7 ). Wektory aktywne dzielą płaszczyznę na sześć sektorów (rys.5.8.). Wektor zadany U* jest realizowany przez załączenie (na odpowiednie chwile czasowe) dwóch wektorów ograniczających sektor w którym w danym momencie się znajduje. Długość wektora zadanego (amplitudę napięcia wyjściowego przekształtnika) zmieniamy wydłużając lub skracając czasy załączeń wektorów zerowych ( U, U ). 0 7 Im U 3 (010) sector 1 U 2 (110) U 4 (011) sector 2 sector 3 (t 2 /T s )U 2 (2/3)U dc U 1 (100) U 0 (000) α U 7 (111) (t 1 /T s )U 1 U* U* max sector 0 U 5 (001) sector 4 U 6 (101) sector 5 Re Rys.5.8. Reprezentacja wektora przestrzennego dla przekształtnika dwupoziomowego.
39 Zależności matematyczne dla zerowego sektora są przedstawione w równaniach ( ) t t 2 3 π = MTs sin( ) 5.1. π 3 1 α 2 3 = MTs sin( ) 5.2. π 2 α Gdzie : α-kąt napięcia w sektorze, M-współczynnik modulacji ( M * U m -amplituda zadanego napięcia, Ts -czas próbkowania. * U m = (2 / π ) U DC ), Modulacja w trzech fazach. Po obliczeniu czasów t 1, t 2 pozostały czas w metodzie z symetrycznymi wektorami zerowymi (ang. Space Vector Pulse Width Modulation - SVPWM) jest równomiernie rozkładany na czasy załączeń wektorów zerowych t, t 0 7 (wzór 5.3.) t 0 7 s 2 1 = t = 0.5 (T t t ) 5.3. Przebiegi czasowe dla trzech gałęzi falownika są przedstawione na rys.11. T S T S t 0 t t t 7 7 t 1 t t t D_R D_S D_T U U U U U U U U Rys.5.9. Zależności czasowe załączeń poszczególnych wektorów dla SVPWM Modulacja w dwóch fazach. Kolejnym rozwiązaniem modulacji wektora przestrzennego jest modulacja nieciągła DPWM (ang. Discontinoous Pulse Width Modulation). W tym wypadku modulowane są tylko dwie fazy a trzecia jest podłączona do górnej lub dolnej szyny U DC. W wyniku tej
40 operacji występuje tylko jeden wektor zerowy w czasie próbkowania. Ogranicza to straty łączeniowe średnio o 33%. Straty te zależą w dużym stopniu od współczynnika mocy, przy odpowiednim doborze metody modulacji w dwóch fazach możemy ograniczyć je do 50% (rys.5.11.). Rysunek 5.10 przedstawia cztery różne rodzaje modulacji nieciągłej. Można zauważyć, że regiony w których używany jest jeden z wektorów zerowych są odpowiednio przesunięte o 0, 30,60 i 90 stopni. Czasy załączeń wektorów zerowych można określić następująco : t t 0 0 t 7 = Ts t 2 t1 = dla 0 α < π / = dla π / 6 α < π / t 0 = Ts t 2 t1 Przy czym t 0 = 0 oznacza, że wykorzystujemy tylko wektor U 7, a t 7 = 0 oznacza wykorzystanie wektora U 0. U 4 (011) U 3 (010) t 7 t 0 U0(000 ) U7(111 ) Im PWM(0) U 2 (110) U 3 (010) Im PWM(1) U 2 (110) t 0 t 0 t 7 t 0 t 7 t 7 t U 1 (100) U 4 (011) 7 U0(000) 30 0 t 0 U 1 (100) U7(111) Re t 7 t 0 Re t 0 t 0 t 7 t 7 t 0 t 7 U 5 (001) U 6 (101) U 5 (001) U 6 (101) U 4 (011) U 3 (010) t 0 t 7 U0(000 ) U7(111 ) t 0 Im PWM(2) t 7 U 2 (110) U 3 (010) t t U 1 (100) U 4 (011) 0 t U 1 (100) U 0 (000) U Re 7 (111) t Re 0 t 7 t 7 t 7 t 0 t 7 t 7 Im t 7 t 0 PWM(3) t 0 t 0 U 2 (110) U 5 (001) U 6 (101) U 5 (001) U 6 (101) Rys Rozmieszczenie wektorów zerowych dla modulacji w dwóch fazach. PWM(0) = 0 stopni, PWM(1) = 30 stopni, PWM(2) = 60 stopni, PWM(3) = 90 stopni.[1]
41 0.9 Switching losses (x100%) P W M (1 ) P W M (3 ) P W M (0 ) P W M (2 ) P o w e r fa c to r a n g le Rys Zależność strat łączeniowych od współczynnika mocy. [4] T S T S t 0 t t 1 2 t 2 t1 0 t T S T S t t t 7 t t 2 t1 D_R D_S D_T U U U U U U U U U U U U a) b) Rys Wykorzystanie wektorów zerowych w modulacji w dwóch fazach. a) U 0 (000). b) U 7 (111) 5.3. Metody modulacji w układach sterowania trójpoziomowych przekształtników typu NPC Wstęp Dla przekształtników trójpoziomowych, metoda z falą nośną opiera się na trzech zadanych sygnałach modulowanych, przesuniętych w fazie o 2 / 3 π względem siebie i dwóch sygnałach nośnych (w przeciwieństwie do przekształtników dwupoziomowych, gdzie występuje tylko jeden sygnał nośny). Istnieje kilka rodzajów modulacji z falą nośną.
42 Ze względu na sposób położenia sygnałów nośnych względem sygnału zadanego rozróżniamy dwa rodzaje modulacji: modulację z przesunięciem fazowym (ang. phase shifted modulation), w której amplituda sygnałów nośnych jest taka sama i zmienia się w zakresie od +U m do U m, a sygnały nośne są przesunięte w fazie o 180 (schemat blokowy sterowania jedną fazą przedstawiono na rys. 5.14); X ref S x1 S x S x2 -u m u m S x2 Rys Schemat blokowy sterowania w jednej fazie dla modulacji z przesunięciem fazowym modulację z przesuniętym poziomem sygnałów nośnych (ang. level shifted modulation), która zasadniczo opiera się na tym, że amplituda pierwszego sygnału nośnego zmienia się od zera do +U m, a amplituda drugiego sygnału nośnego zmienia się od zera do U m (schemat blokowy sterowania jedną fazą przedstawiono na rys. 5.15). Rys Schemat blokowy sterowania w jednej fazie dla modulacji z przesuniętym poziomem sygnałów nośnych
43 W przypadku modulacji z przesuniętym poziomem sygnałów nośnych istnieją dodatkowe odmiany polegające na przesuwaniu sygnałów nośnych w fazie względem siebie Modulator wektorowy Modulacja wektorowa opiera się na reprezentacji napięcia trójfazowego za pomocą jednego wektora przestrzennego U ref. W pracy przekształtnika trójpoziomowego można wyróżnić dwadzieścia siedem stanów przewodzenia łączników, z czego dwadzieścia cztery są stanami aktywnymi (sześć z nich jest stanami redundantnymi) a trzy stanami zerowymi. Wektor ten można przedstawić przy symetrycznym napięciu sieci w stacjonarnym układzie współrzędnych (α-β). Posiada on stały moduł i liniowo zmieniający się kąt fazowy. Płaszczyzna (α-β) została podzielona na sześć części sektorów, a każdy sektor na 4 regiony. Każdy wektor aktywny na płaszczyźnie ma przyporządkowaną stałą pozycję. Stany pośrednie wektora napięcia U ref uzyskuje się poprzez odpowiednie załączenie sąsiadujących aktywnych wektorów. Poprzez załączanie wektorów zerowych regulujemy amplitudę wektora napięcia. Na rys przedstawiono płaszczyznę (α-β) wraz z podziałem na sektory oraz pozycjami poszczególnych wektorów aktywnych. Rys Reprezentacja wektorów na płaszczyźnie (α-β) z podziałem na sektory
44 Na rys przedstawiono pierwszy sektor z podziałem na regiony i odpowiednio przyporządkowanymi wektorami. 220 V 3 3 V V U ref 222 V 1 V V Rys Pierwszy sektor z podziałem na regiony Stan danego wektora określany jest na 3 pozycjach. Pierwsza odnosi się do łączników w gałęzi fazy a, druga do łączników w fazie b, trzecia do łączników w fazie c. Stany załączeń łączników dla odpowiedniego stanu zostały przedstawione na rys
45 Rys Stany łączników: a) stan 2 generacja dodatniego napięcia, b) stan 1 generacja zerowego napięcia, c) stan 0 generacja ujemnego napięcia Wektor zerowy V 0 przyjmuje stany 000, 111, 222. Wektory krótkie V 4 i V 5 są wektorami redundantnymi, to znaczy posiadają po dwa stany generujące to samo napięcie. Za ich pomocą
46 można wyrównywać napięcie w obwodzie pośredniczącym. Wektory długie V 1, V 2 i V 3 posiadają po jednym stanie i nie mają wpływu na wyrównywanie napięć w obwodzie pośredniczącym. Indeks modulacji M określany jest na podstawie zależności: M U ref π = (5.6) U DC gdzie U ref jest modułem wartości wektora zadanego. W celu ograniczenia pracy przekształtnika do pracy liniowej indeks modulacji został ograniczony do: M 3 (5.7) co pozwala na utrzymanie modułu wektora zadanego U ref wewnątrz okręgu wpisanego w sześciokąt. Aby wyznaczyć czasy załączeń poszczególnych wektorów wprowadzono pomocnicze indeksy m 1 i m 2. Po zrzutowaniu ich na boki trójkąta równobocznego tworzącego dany sektor (rys. 5.19) wyznacza się ich wartości na podstawie zależności trygonometrycznych: sin Θ m 1 = M cosθ 3 (5.8) sin Θ m 2 = 2M 3 (5.9) Rys Rzutowanie wektora zadanego U ref na boki sektora
47 Na podstawie wartości indeksów pomocniczych i prostych zależności matematycznych można określić, w którym regionie znajduje się wektor zadany U ref oraz wyznaczyć czasy załączeń odpowiednich wektorów. Sumaryczne informacje o sposobie tych wyliczeń zebrano w tabeli 5.1. Należy wziąć pod uwagę, że sposób wyliczenia czasów załączeń jest taki sam dla pozostałych pięciu sektorów. Wystarczy tylko dokonać normalizacji kąta Θ położenia wektora U ref w przypadku, gdy o Θ > 60 do pierwszego sektora, a wyliczone czasy załączeń odnieść do odpowiednich wektorów aktywnych. Przedstawiony sposób wyznaczania czasów załączeń wektorów jest prosty z punktu widzenia matematyki i co za tym idzie łatwy do implementacji w procesorze. Tabela 5.1 Wyliczanie czasów załączeń wektorów w poszczególnych regionach pierwszego sektora Przypadek Region Czasy załączeń T 1 = m1 1 m >1 1 1 T 2 = m 2 T 4 = 2 m1 m2 m 1 1 T4 = 1 m 2 m T5 = 1 m1 m + m 1 T = m + m > T 2 = m 1 m > T = m T 5 = 2 m1 m2 m 1 1 T 4 = m 1 m T 5 = m2 m + m 1 T0 = 1 m1 m2 1 2 W czwartym regionie klasyczny modulator wektorowy wykorzystuje symetryczne rozłożenie wektorów zerowych. Czas T 0 jest podzielony na trzy i każda kombinacja łączników wektora zerowego (000, 111, 222) jest załączana na jedna trzecią tego czasu. W celu wyrównywania napięć na kondensatorach we wszystkich regionach wektory V 4 i V 5, o ile w nich występują zostają załączone w
48 ten sposób, że przez połowę odpowiadających im czasów T 4 i T 5 załączony jest jeden stan redundancyjny, a przez drugą połowę tych czasów załączony jest drugi stan redundancyjny. Dzięki temu zapewniona jest najlepsza stabilizacja napięcia w punkcie neutralnym NP, jednakże prowadzi to do wysokich strat łączeniowych. OPIS ĆWICZEŃ Ćw. 1 Wiadomości wstępne z programów symulacyjnych Matlab/Simulink i Saber 1) Wiadomości wstępne dotyczące programu Saber 2) Modyfikacja elementów obwodu mocy a) Zmiana indukcyjności dławika b) Zmiana parametrów tranzystorów IGBT c) Zmiana parametrów generatora 3) Modyfikacja algorytmu sterowania a) Zmiana kroku próbkowania i częstotliwości łączeń tranzystorów b) Zmiana parametrów regulatorów histerezowych i regulatorów PI 4) Wiadomości wstępne dotyczące programu Matlab/SIMULINK/PLECS a) Posługiwanie się edytorami b) Ustawianie parametrów symulatora c) Przegląd bibliotek 5) Budowanie części obwodowej modelu (przekształtnik, generator) 6) Budowanie części sygnałowej modelu (regulatory, generator) Ćw. 2 Modele wybranych generatorów 1) Wiadomości wstępne dotyczące obwodowego i sygnałowego modelowania maszyn DC, ASM, PMSM 2) Wzbudzanie generatora asynchronicznego
49 3) Badanie właściwości statycznych i dynamicznych wybranych generatorów 4) Samodzielna budowa lub uzupełnienie wybranego modelu sygnałowego maszyny Ćw. 3 Podstawowe topologie przekształtników wykorzystywanych w energetyce odnawialnej 1) Wiadomości wstępne dotyczące obwodowego i sygnałowego modelowania przekształtników energoelektronicznych 2) Prostownik sterowany (przekształtnik AC/DC) (demonstracja) 3) Falownik (przekształtnik DC/AC) (demonstracja) 4) Przekształtnik AC/DC/AC (demonstracja) 5) Przekształtnik DC/DC dla magazynu akumulatorowego lub superkondensatorowego (demonstracja) 6) Samodzielna budowa układu regulacji dla przekształtnika step-up lub step-down Ćw. 4. Nowoczesne metody sterowania przekształtnikami MSI 1) Wiadomości wstępne dotyczące metod sterowania i ich opis w programie Saber i Matlab/Simulink 2) Porównanie metod sterowania ze zmienną i stałą częstotliwością łączeń oraz dobór dławika wejściowego bądź filtra LCL 3) Porównanie działania metod bazujących na orientacji względem wektora napięcia linii zasilającej i wirtualnego strumienia 4) Badania i porównanie metod sterowania przy zniekształconym i asymetrycznym napięciu zasilającym Ćw. 5. Przegląd podstawowych technik modulacji 1) Wiadomości wstępne dotyczące modulacji dla przekształtników dwu i trzy-poziomowych 2) Badania i porównanie metod modulacji z różnymi sygnałami kolejności zerowej 3) Dobór sygnału kolejności zerowej i częstotliwości do aplikacji 4) Dobór dławika i filtra LCL oraz badanie zjawiska rezonansu i sposoby tłumienia
50
Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Sterowanie napędów i serwonapędów elektrycznych prof. dr hab. inż.
Bezpośrednie sterowanie momentem silnika indukcyjnego zasilanego z 3-poziomowego. przekształtnika MSI z kondensatorami o zmiennym potencjale
 Bezpośrednie sterowanie momentem silnika indukcyjnego zasilanego z 3-poziomowego przekształtnika MSI z kondensatorami o zmiennym potencjale przekształtnika MSI z kondensatorami o zmiennym potencjale 1
Bezpośrednie sterowanie momentem silnika indukcyjnego zasilanego z 3-poziomowego przekształtnika MSI z kondensatorami o zmiennym potencjale przekształtnika MSI z kondensatorami o zmiennym potencjale 1
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego
 Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
Silnik indukcyjny - historia
 Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Laboratorium. Automatyka napędu elektrycznego
 POLITECHNIKA WROCŁAWSKA INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH ZAKŁAD NAPĘDU ELEKTRYCZNEGO, MECHATRONIKI I AUTOMATYKI PRZEMYSŁOWEJ Laboratorium Automatyka napędu elektrycznego Ćwiczenie Badanie
POLITECHNIKA WROCŁAWSKA INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH ZAKŁAD NAPĘDU ELEKTRYCZNEGO, MECHATRONIKI I AUTOMATYKI PRZEMYSŁOWEJ Laboratorium Automatyka napędu elektrycznego Ćwiczenie Badanie
Ćwiczenie 1. Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym.
 Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
Ćwiczenie 1 Symulacja układu napędowego z silnikiem DC i przekształtnikiem obniżającym. Środowisko symulacyjne Symulacja układu napędowego z silnikiem DC wykonana zostanie w oparciu o środowisko symulacyjne
PL B1. POLITECHNIKA GDAŃSKA, Gdańsk, PL BUP 20/10. JAROSŁAW GUZIŃSKI, Gdańsk, PL WUP 05/15. rzecz. pat.
 PL 219507 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219507 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387564 (22) Data zgłoszenia: 20.03.2009 (51) Int.Cl.
PL 219507 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219507 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 387564 (22) Data zgłoszenia: 20.03.2009 (51) Int.Cl.
Przekształtniki impulsowe prądu stałego (dc/dc)
") Przekształtniki impulsowe prądu stałego (dc/dc) Wprowadzenie Sterowanie napięciem przez Modulację Szerokości Impulsów MSI (Pulse Width Modulation - PWM) Przekształtnik obniżający napięcie (buck converter)
Przekształtniki impulsowe prądu stałego (dc/dc) Wprowadzenie Sterowanie napięciem przez Modulację Szerokości Impulsów MSI (Pulse Width Modulation - PWM) Przekształtnik obniżający napięcie (buck converter)
d J m m dt model maszyny prądu stałego
 model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
Przekształtniki napięcia stałego na stałe
 Przekształtniki napięcia stałego na stałe Buck converter S 1 łącznik w pełni sterowalny, przewodzi prąd ze źródła zasilania do odbiornika S 2 łącznik diodowy zwiera prąd odbiornika przy otwartym S 1 U
Przekształtniki napięcia stałego na stałe Buck converter S 1 łącznik w pełni sterowalny, przewodzi prąd ze źródła zasilania do odbiornika S 2 łącznik diodowy zwiera prąd odbiornika przy otwartym S 1 U
IMPULSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM
 Instrukcja do ćwiczenia laboratoryjnego. IMPSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM Przekształtnik impulsowy z tranzystorem szeregowym słuŝy do przetwarzania energii prądu jednokierunkowego
Instrukcja do ćwiczenia laboratoryjnego. IMPSOWY PRZEKSZTAŁTNIK ENERGII Z TRANZYSTOREM SZEREGOWYM Przekształtnik impulsowy z tranzystorem szeregowym słuŝy do przetwarzania energii prądu jednokierunkowego
PROGRAMY I WYMAGANIA TEORETYCZNE DO ĆWICZEŃ W LABORATORIUM NAPĘDOWYM DLA STUDIÓW DZIENNYCH, WYDZIAŁU ELEKTROTECHNIKI I ELEKTRONIKI.
 PROGRAMY I WYMAGANIA TEORETYCZNE DO ĆWICZEŃ W LABORATORIUM NAPĘDOWYM DLA STUDIÓW DZIENNYCH, WYDZIAŁU ELEKTROTECHNIKI I ELEKTRONIKI. Dla ćwiczeń symulacyjnych podane są tylko wymagania teoretyczne. Programy
PROGRAMY I WYMAGANIA TEORETYCZNE DO ĆWICZEŃ W LABORATORIUM NAPĘDOWYM DLA STUDIÓW DZIENNYCH, WYDZIAŁU ELEKTROTECHNIKI I ELEKTRONIKI. Dla ćwiczeń symulacyjnych podane są tylko wymagania teoretyczne. Programy
Z powyższej zależności wynikają prędkości synchroniczne n 0 podane niżej dla kilku wybranych wartości liczby par biegunów:
 Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Bugaj Piotr, Chwałek Kamil Temat pracy: ANALIZA GENERATORA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI Z POMOCĄ PROGRAMU FLUX 2D. Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. AGH Maszyna synchrocznina
Katedra Energoelektroniki i Napędów Elektrycznych Wydział Elektryczny Politechniki Białostockiej
 Katedra Energoelektroniki i Napędów Elektrycznych Wydział Elektryczny Politechniki Białostockiej 16.11.2017. Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych
Katedra Energoelektroniki i Napędów Elektrycznych Wydział Elektryczny Politechniki Białostockiej 16.11.2017. Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych
f r = s*f s Rys. 1 Schemat układu maszyny dwustronnie zasilanej R S T P r Generator MDZ Transformator dopasowujący Przekształtnik wirnikowy
 PORTFOLIO: Opracowanie koncepcji wdrożenia energooszczędnego układu obciążenia maszyny indukcyjnej dla przedsiębiorstwa diagnostyczno produkcyjnego. (Odpowiedź na zapotrzebowanie zgłoszone przez przedsiębiorstwo
PORTFOLIO: Opracowanie koncepcji wdrożenia energooszczędnego układu obciążenia maszyny indukcyjnej dla przedsiębiorstwa diagnostyczno produkcyjnego. (Odpowiedź na zapotrzebowanie zgłoszone przez przedsiębiorstwo
Spis treści 1. Wstęp 2. Ćwiczenia laboratoryjne LPM
 Spis treści 1. Wstęp... 9 2. Ćwiczenia laboratoryjne... 12 2.1. Środowisko projektowania Quartus II dla układów FPGA Altera... 12 2.1.1. Cel ćwiczenia... 12 2.1.2. Wprowadzenie... 12 2.1.3. Przebieg ćwiczenia...
Spis treści 1. Wstęp... 9 2. Ćwiczenia laboratoryjne... 12 2.1. Środowisko projektowania Quartus II dla układów FPGA Altera... 12 2.1.1. Cel ćwiczenia... 12 2.1.2. Wprowadzenie... 12 2.1.3. Przebieg ćwiczenia...
Ćwiczenie 1b. Silnik prądu stałego jako element wykonawczy Modelowanie i symulacja napędu CZUJNIKI POMIAROWE I ELEMENTY WYKONAWCZE
 Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
Politechnika Łódzka Katedra Mikroelektroniki i Technik Informatycznych 90-924 Łódź, ul. Wólczańska 221/223, bud. B18 tel. 42 631 26 28 faks 42 636 03 27 e-mail secretary@dmcs.p.lodz.pl http://www.dmcs.p.lodz.pl
PL B1. Sposób regulacji prądu silnika asynchronicznego w układzie bez czujnika prędkości obrotowej. POLITECHNIKA GDAŃSKA, Gdańsk, PL
 PL 224167 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224167 (13) B1 (21) Numer zgłoszenia: 391278 (51) Int.Cl. H02P 27/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 224167 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 224167 (13) B1 (21) Numer zgłoszenia: 391278 (51) Int.Cl. H02P 27/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Ćwiczenie: "Pomiary mocy w układach trójfazowych dla różnych charakterów obciążenia"
 Ćwiczenie: "Pomiary mocy w układach trójfazowych dla różnych charakterów obciążenia" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską
Ćwiczenie: "Pomiary mocy w układach trójfazowych dla różnych charakterów obciążenia" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
TEMATY PRAC DYPLOMOWYCH do wyboru w wiosna 2017 r.
 TEMATY PRAC DYPLOMOWYCH do wyboru w wiosna 2017 r. Lp. 1. Opiekun pracy (imię i nazwisko, tytuł lub stopień naukowy) Temat, cel i zakres pracy Analiza bezszczotkowego silnika prądu stałego przeznaczonego
TEMATY PRAC DYPLOMOWYCH do wyboru w wiosna 2017 r. Lp. 1. Opiekun pracy (imię i nazwisko, tytuł lub stopień naukowy) Temat, cel i zakres pracy Analiza bezszczotkowego silnika prądu stałego przeznaczonego
42 Przekształtniki napięcia stałego na napięcie przemienne topologia falownika napięcia, sterowanie PWM
 42 Przekształtniki napięcia stałego na napięcie przemienne topologia falownika napięcia, sterowanie PWM Falownikami nazywamy urządzenia energoelektroniczne, których zadaniem jest przetwarzanie prądów i
42 Przekształtniki napięcia stałego na napięcie przemienne topologia falownika napięcia, sterowanie PWM Falownikami nazywamy urządzenia energoelektroniczne, których zadaniem jest przetwarzanie prądów i
Wykaz symboli, oznaczeń i skrótów
 Wykaz symboli, oznaczeń i skrótów Symbole a a 1 operator obrotu podstawowej zmiennych stanu a 1 podstawowej uśrednionych zmiennych stanu b 1 podstawowej zmiennych stanu b 1 A A i A A i, j B B i cosφ 1
Wykaz symboli, oznaczeń i skrótów Symbole a a 1 operator obrotu podstawowej zmiennych stanu a 1 podstawowej uśrednionych zmiennych stanu b 1 podstawowej zmiennych stanu b 1 A A i A A i, j B B i cosφ 1
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej.
 Szkoły Policealnej Zawodowej.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
ANALIZA PRACY SILNIKA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI W WARUNKACH ZAPADU NAPIĘCIA
 Zeszyty Problemowe Maszyny Elektryczne Nr 4/2014 (104) 89 Zygfryd Głowacz, Henryk Krawiec AGH Akademia Górniczo-Hutnicza, Kraków ANALIZA PRACY SILNIKA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI W WARUNKACH ZAPADU
Zeszyty Problemowe Maszyny Elektryczne Nr 4/2014 (104) 89 Zygfryd Głowacz, Henryk Krawiec AGH Akademia Górniczo-Hutnicza, Kraków ANALIZA PRACY SILNIKA SYNCHRONICZNEGO Z MAGNESAMI TRWAŁYMI W WARUNKACH ZAPADU
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO
 Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Elektroniczne Systemy Przetwarzania Energii
 Elektroniczne Systemy Przetwarzania Energii Zagadnienia ogólne Przedmiot dotyczy zagadnień Energoelektroniki - dyscypliny na pograniczu Elektrotechniki i Elektroniki. Elektrotechnika zajmuje się: przetwarzaniem
Elektroniczne Systemy Przetwarzania Energii Zagadnienia ogólne Przedmiot dotyczy zagadnień Energoelektroniki - dyscypliny na pograniczu Elektrotechniki i Elektroniki. Elektrotechnika zajmuje się: przetwarzaniem
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5
 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Spis treści. Oznaczenia Wiadomości ogólne Przebiegi zwarciowe i charakteryzujące je wielkości
 Spis treści Spis treści Oznaczenia... 11 1. Wiadomości ogólne... 15 1.1. Wprowadzenie... 15 1.2. Przyczyny i skutki zwarć... 15 1.3. Cele obliczeń zwarciowych... 20 1.4. Zagadnienia zwarciowe w statystyce...
Spis treści Spis treści Oznaczenia... 11 1. Wiadomości ogólne... 15 1.1. Wprowadzenie... 15 1.2. Przyczyny i skutki zwarć... 15 1.3. Cele obliczeń zwarciowych... 20 1.4. Zagadnienia zwarciowe w statystyce...
ĆWICZENIE 3 Badanie obwodów trójfazowych z odbiornikiem połączonym w trójkąt
 ĆWICZENIE 3 Badanie obwodów trójfazowych z odbiornikiem połączonym w trójkąt 1. Cel ćwiczenia Zapoznanie się z rozpływem prądów, rozkładem napięć i poborem mocy w obwodach trójfazowych połączonych w trójkąt:
ĆWICZENIE 3 Badanie obwodów trójfazowych z odbiornikiem połączonym w trójkąt 1. Cel ćwiczenia Zapoznanie się z rozpływem prądów, rozkładem napięć i poborem mocy w obwodach trójfazowych połączonych w trójkąt:
Katedra Energoelektroniki i Napędów Elektrycznych Wydział Elektryczny Politechniki Białostockiej
 Katedra Energoelektroniki i Napędów Elektrycznych Wydział Elektryczny Politechniki Białostockiej 09.11.2018 Zgodnie z procedurą dyplomowania na Wydziale Elektrycznym, poniżej przedstawiono tematy prac
Katedra Energoelektroniki i Napędów Elektrycznych Wydział Elektryczny Politechniki Białostockiej 09.11.2018 Zgodnie z procedurą dyplomowania na Wydziale Elektrycznym, poniżej przedstawiono tematy prac
Prototypowanie systemów sterowania
 Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 4 Prototypowanie układów
Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 4 Prototypowanie układów
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
PLAN PREZENTACJI. 2 z 30
 P O L I T E C H N I K A Ś L Ą S K A WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRONIKI, NAPĘDU ELEKTRYCZNEGO I ROBOTYKI Energoelektroniczne przekształtniki wielopoziomowe właściwości i zastosowanie dr inż.
P O L I T E C H N I K A Ś L Ą S K A WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRONIKI, NAPĘDU ELEKTRYCZNEGO I ROBOTYKI Energoelektroniczne przekształtniki wielopoziomowe właściwości i zastosowanie dr inż.
UKŁAD AUTOMATYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU STAŁEGO KONFIGUROWANY GRAFICZNIE
 UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
Ćwiczenie: "Silnik prądu stałego"
 Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Układ kaskadowy silnika indukcyjnego pierścieniowego na stały moment
 Ćwiczenie 15 Układ kaskadowy silnika indukcyjnego pierścieniowego na stały moment 15.1. Program ćwiczenia 1. Zapoznanie się z budową i działaniem układu napędowego kaskady zaworowej stałego momentu. 2.
Ćwiczenie 15 Układ kaskadowy silnika indukcyjnego pierścieniowego na stały moment 15.1. Program ćwiczenia 1. Zapoznanie się z budową i działaniem układu napędowego kaskady zaworowej stałego momentu. 2.
st. stacjonarne I st. inżynierskie, Energetyka Laboratorium Podstaw Elektrotechniki i Elektroniki Ćwiczenie nr 4 OBWODY TRÓJFAZOWE
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki 1. Wstęp st. stacjonarne I st. inżynierskie, Energetyka Laboratorium Podstaw Elektrotechniki i Elektroniki Ćwiczenie nr 4 OBWODY TRÓJFAZOWE Układem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki 1. Wstęp st. stacjonarne I st. inżynierskie, Energetyka Laboratorium Podstaw Elektrotechniki i Elektroniki Ćwiczenie nr 4 OBWODY TRÓJFAZOWE Układem
Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu.
 PRZYKŁAD C5 Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu. W charakterze przykładu rozpatrzmy model silnika klatkowego, którego parametry są następujące: Moc znamionowa
PRZYKŁAD C5 Opracować model ATP-EMTP silnika indukcyjnego i przeprowadzić analizę jego rozruchu. W charakterze przykładu rozpatrzmy model silnika klatkowego, którego parametry są następujące: Moc znamionowa
Oddziaływanie wirnika
 Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
2. Struktura programu MotorSolve. Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
 2. Struktura programu MotorSolve Zakres zastosowań Program MotorSolve pozwala na projektowanie 3 rodzajów silników prądu przemiennego: synchronicznych wzbudzanych magnesami trwałymi lub elektromagnetycznie,
2. Struktura programu MotorSolve Zakres zastosowań Program MotorSolve pozwala na projektowanie 3 rodzajów silników prądu przemiennego: synchronicznych wzbudzanych magnesami trwałymi lub elektromagnetycznie,
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7
 Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
Statyczne badanie wzmacniacza operacyjnego - ćwiczenie 7 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi zastosowaniami wzmacniacza operacyjnego, poznanie jego charakterystyki przejściowej
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Silniki indukcyjne. Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe.
 Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników:
 Temat: Analiza pracy i właściwości ruchowych maszyn synchronicznych Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników: budowy wirnika stanu nasycenia rdzenia
Temat: Analiza pracy i właściwości ruchowych maszyn synchronicznych Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników: budowy wirnika stanu nasycenia rdzenia
Silniki prądu stałego. Wiadomości ogólne
 Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Instytut Elektrotechniki i Automatyki Okrętowej Część 8 Maszyny asynchroniczne indukcyjne prądu zmiennego Maszyny asynchroniczne
Zespół Dydaktyczno-Naukowy Napędów i Sterowania Instytut Maszyn Roboczych Ciężkich P.W. Laboratorium Układów Napędowych ĆWICZENIE 3
 Zespół Dydaktyczno-Naukowy Napędów i Sterowania Instytut Maszyn Roboczych Ciężkich P.W. Laboratorium Układów Napędowych ĆWICZENIE 3 Zastosowanie falownika jako układu sterowania pracą silnika indukcyjnego
Zespół Dydaktyczno-Naukowy Napędów i Sterowania Instytut Maszyn Roboczych Ciężkich P.W. Laboratorium Układów Napędowych ĆWICZENIE 3 Zastosowanie falownika jako układu sterowania pracą silnika indukcyjnego
PL B1. POLITECHNIKA GDAŃSKA, Gdańsk, PL BUP 10/16. JAROSŁAW GUZIŃSKI, Gdańsk, PL PATRYK STRANKOWSKI, Kościerzyna, PL
 PL 226485 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226485 (13) B1 (21) Numer zgłoszenia: 409952 (51) Int.Cl. H02J 3/01 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 226485 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226485 (13) B1 (21) Numer zgłoszenia: 409952 (51) Int.Cl. H02J 3/01 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
W4. UKŁADY ZŁOŻONE I SPECJALNE PRZEKSZTAŁTNIKÓW SIECIOWYCH (AC/DC, AC/AC)
") W4. UKŁADY ZŁOŻONE I SPECJALNE PRZEKSZTAŁTNIKÓW SIECIOWYCH (AC/DC, AC/AC) W W2 i W3 przedstawiono układy jednokierunkowe 2 i 3-pulsowe (o jednokierunkowym prądzie w źródle napięcia przemiennego). Ich poznanie
W4. UKŁADY ZŁOŻONE I SPECJALNE PRZEKSZTAŁTNIKÓW SIECIOWYCH (AC/DC, AC/AC) W W2 i W3 przedstawiono układy jednokierunkowe 2 i 3-pulsowe (o jednokierunkowym prądzie w źródle napięcia przemiennego). Ich poznanie
Ćwiczenie: "Obwody prądu sinusoidalnego jednofazowego"
 Ćwiczenie: "Obwody prądu sinusoidalnego jednofazowego" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres
Ćwiczenie: "Obwody prądu sinusoidalnego jednofazowego" Opracowane w ramach projektu: "Informatyka mój sposób na poznanie i opisanie świata realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
WPŁYW USZKODZENIA TRANZYSTORA IGBT PRZEKSZTAŁTNIKA CZĘSTOTLIWOŚCI NA PRACĘ NAPĘDU INDUKCYJNEGO
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 69 Politechniki Wrocławskiej Nr 69 Studia i Materiały Nr 33 2013 Kamil KLIMKOWSKI*, Mateusz DYBKOWSKI* DTC-SVM, DFOC, silnik indukcyjny,
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 69 Politechniki Wrocławskiej Nr 69 Studia i Materiały Nr 33 2013 Kamil KLIMKOWSKI*, Mateusz DYBKOWSKI* DTC-SVM, DFOC, silnik indukcyjny,
Modulatory PWM CELE ĆWICZEŃ PODSTAWY TEORETYCZNE
 Modulatory PWM CELE ĆWICZEŃ Poznanie budowy modulatora szerokości impulsów z układem A741. Analiza charakterystyk i podstawowych obwodów z układem LM555. Poznanie budowy modulatora szerokości impulsów
Modulatory PWM CELE ĆWICZEŃ Poznanie budowy modulatora szerokości impulsów z układem A741. Analiza charakterystyk i podstawowych obwodów z układem LM555. Poznanie budowy modulatora szerokości impulsów
PL B1. Sposób regulacji prędkości obrotowej silnika asynchronicznego zasilanego z falownika napięcia z filtrem silnikowym
 PL 214857 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214857 (13) B1 (21) Numer zgłoszenia: 381804 (51) Int.Cl. H02P 21/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 214857 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214857 (13) B1 (21) Numer zgłoszenia: 381804 (51) Int.Cl. H02P 21/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Zasilanie silnika indukcyjnego poprzez układ antyrównoległy
 XL SESJA STUDENCKICH KÓŁ NAUKOWYCH Zasilanie silnika indukcyjnego poprzez układ antyrównoległy Wykonał: Paweł Pernal IV r. Elektrotechnika Opiekun naukowy: prof. Witold Rams 1 Wstęp. Celem pracy było przeanalizowanie
XL SESJA STUDENCKICH KÓŁ NAUKOWYCH Zasilanie silnika indukcyjnego poprzez układ antyrównoległy Wykonał: Paweł Pernal IV r. Elektrotechnika Opiekun naukowy: prof. Witold Rams 1 Wstęp. Celem pracy było przeanalizowanie
Laboratorium Elektroniki w Budowie Maszyn
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Laboratorium Elektroniki w Budowie Maszyn LWBM-3 Falownikowy układ napędowy Instrukcja do ćwiczenia Opracował:
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Silniki synchroniczne
 Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
AC/DC. Jedno połówkowy, jednofazowy prostownik
 AC/DC Przekształtniki AC/DC można podzielić na kilka typów, mianowicie: prostowniki niesterowane; prostowniki sterowane. Zależnie od stopnia skomplikowania układu i miejsca przyłączenia do sieci elektroenergetycznej
AC/DC Przekształtniki AC/DC można podzielić na kilka typów, mianowicie: prostowniki niesterowane; prostowniki sterowane. Zależnie od stopnia skomplikowania układu i miejsca przyłączenia do sieci elektroenergetycznej
Ćwiczenie 3 Falownik
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 3 Falownik Poznań 2012 Opracował: mgr inż. Bartosz Minorowicz Zakład Urządzeń
PRĄDNICE I SILNIKI. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Elektromechaniczne przetwarzanie energii Rok akademicki: 2012/2013 Kod: EEL-1-403-s Punkty ECTS: 5 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Nazwa modułu: Elektromechaniczne przetwarzanie energii Rok akademicki: 2012/2013 Kod: EEL-1-403-s Punkty ECTS: 5 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Zastosowania liniowe wzmacniaczy operacyjnych
 UKŁADY ELEKTRONICZNE Instrukcja do ćwiczeń laboratoryjnych Zastosowania liniowe wzmacniaczy operacyjnych Laboratorium Układów Elektronicznych Poznań 2008 1. Cel i zakres ćwiczenia Celem ćwiczenia jest
UKŁADY ELEKTRONICZNE Instrukcja do ćwiczeń laboratoryjnych Zastosowania liniowe wzmacniaczy operacyjnych Laboratorium Układów Elektronicznych Poznań 2008 1. Cel i zakres ćwiczenia Celem ćwiczenia jest
Dobór współczynnika modulacji częstotliwości
 Dobór współczynnika modulacji częstotliwości Im większe mf, tym wyżej położone harmoniczne wyższe częstotliwości mniejsze elementy bierne filtru większy odstęp od f1 łatwiejsza realizacja filtru dp. o
Dobór współczynnika modulacji częstotliwości Im większe mf, tym wyżej położone harmoniczne wyższe częstotliwości mniejsze elementy bierne filtru większy odstęp od f1 łatwiejsza realizacja filtru dp. o
Spis treści 3. Spis treści
 Spis treści 3 Spis treści Przedmowa 11 1. Pomiary wielkości elektrycznych 13 1.1. Przyrządy pomiarowe 16 1.2. Woltomierze elektromagnetyczne 18 1.3. Amperomierze elektromagnetyczne 19 1.4. Watomierze prądu
Spis treści 3 Spis treści Przedmowa 11 1. Pomiary wielkości elektrycznych 13 1.1. Przyrządy pomiarowe 16 1.2. Woltomierze elektromagnetyczne 18 1.3. Amperomierze elektromagnetyczne 19 1.4. Watomierze prądu
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Laboratorium Elektromechaniczne Systemy Napędowe BADANIE AUTONOMICZNEGO GENERATORA INDUKCYJNEGO
 Laboratorium Elektromechaniczne Systemy Napędowe Ćwiczenie BADANIE AUTONOMICZNEGO GENERATORA INDUKCYJNEGO Instrukcja Opracował: Dr hab. inż. Krzysztof Pieńkowski, prof. PWr Wrocław, listopad 2014 r. Ćwiczenie
Laboratorium Elektromechaniczne Systemy Napędowe Ćwiczenie BADANIE AUTONOMICZNEGO GENERATORA INDUKCYJNEGO Instrukcja Opracował: Dr hab. inż. Krzysztof Pieńkowski, prof. PWr Wrocław, listopad 2014 r. Ćwiczenie
5. STANY PRACY NAPĘDU Z MASZYNĄ OBCOWZBUDNĄ PRĄDU STAŁEGO
 5. STANY PRACY NAPĘDU Z MASZYNĄ OBCOWZBUDNĄ PRĄDU STAŁEGO 5.1. Program ćwiczenia Badanie charakterystyk mechanicznych maszyny przy zasilaniu stałym napięciem Badanie wpływu rezystancji obwodu twornika
5. STANY PRACY NAPĘDU Z MASZYNĄ OBCOWZBUDNĄ PRĄDU STAŁEGO 5.1. Program ćwiczenia Badanie charakterystyk mechanicznych maszyny przy zasilaniu stałym napięciem Badanie wpływu rezystancji obwodu twornika
PRĄDNICA TRÓJFAZOWA MAŁEJ MOCY WZBUDZANA MAGNESAMI TRWAŁYMI
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 66 Politechniki Wrocławskiej Nr 66 Studia i Materiały Nr 32 212 Marek CIURYS*, Manswet BAŃKA*, Ignacy DUDZIKOWSKI* prądnica trójfazowa,
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 66 Politechniki Wrocławskiej Nr 66 Studia i Materiały Nr 32 212 Marek CIURYS*, Manswet BAŃKA*, Ignacy DUDZIKOWSKI* prądnica trójfazowa,
MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO ZASILACZA AWARYJNEGO UPS O STRUKTURZE TYPU VFI
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 91 Electrical Engineering 2017 DOI 10.21008/j.1897-0737.2017.91.0011 Michał KRYSTKOWIAK* Łukasz CIEPLIŃSKI* MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 91 Electrical Engineering 2017 DOI 10.21008/j.1897-0737.2017.91.0011 Michał KRYSTKOWIAK* Łukasz CIEPLIŃSKI* MODEL SYMULACYJNY ENERGOELEKTRONICZNEGO
Pulse width modulation control of three-phase three-level inverter Sterowanie modulacji szerokości impulsów trójpoziomowego trójfazowego falownika.
 Krzysztof Sroka V rok Koło Naukowe Techniki Cyfrowej Dr inż. Wojciech Mysiński opiekun naukowy Pulse width modulation control of three-phase three-level inverter Sterowanie modulacji szerokości impulsów
Krzysztof Sroka V rok Koło Naukowe Techniki Cyfrowej Dr inż. Wojciech Mysiński opiekun naukowy Pulse width modulation control of three-phase three-level inverter Sterowanie modulacji szerokości impulsów
MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1. Zbigniew Krzemiński, MMB Drives sp. z o.o.
 Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
Zakres modernizacji MODERNIZACJA NAPĘDU ELEKTRYCZNEGO WIRÓWKI DO TWAROGU TYPU DSC/1 Zbigniew Krzemiński, MMB Drives sp. z o.o. Wirówka DSC/1 produkcji NRD zainstalowana w Spółdzielni Mleczarskiej Maćkowy
7. Szybka transformata Fouriera fft
 7. Szybka transformata Fouriera fft Dane pomiarowe sygnałów napięciowych i prądowych często obarczone są dużym błędem, wynikającym z istnienia tak zwanego szumu. Jedną z metod wspomagających analizę sygnałów
7. Szybka transformata Fouriera fft Dane pomiarowe sygnałów napięciowych i prądowych często obarczone są dużym błędem, wynikającym z istnienia tak zwanego szumu. Jedną z metod wspomagających analizę sygnałów
DANE: wartość skuteczna międzyprzewodowego napięcia zasilającego E S = 230 V; rezystancja odbiornika R d = 2,7 Ω; indukcyjność odbiornika.
 Zadanie 4. Prostownik mostkowy 6-pulsowy z tyrystorami idealnymi o komutacji natychmiastowej zasilany z sieci 3 400 V, 50 Hz pracuje z kątem opóźnienia załączenia tyrystorów α = 60º. Obciążenie prostownika
Zadanie 4. Prostownik mostkowy 6-pulsowy z tyrystorami idealnymi o komutacji natychmiastowej zasilany z sieci 3 400 V, 50 Hz pracuje z kątem opóźnienia załączenia tyrystorów α = 60º. Obciążenie prostownika
Politechnika Poznańska, Instytut Elektrotechniki i Elektroniki Przemysłowej, Zakład Energoelektroniki i Sterowania Laboratorium energoelektroniki
 Politechnika Poznańska, Instytut Elektrotechniki i Elektroniki Przemysłowej, Zakład Energoelektroniki i Sterowania Laboratorium energoelektroniki Temat ćwiczenia: Przetwornica impulsowa DC-DC typu boost
Politechnika Poznańska, Instytut Elektrotechniki i Elektroniki Przemysłowej, Zakład Energoelektroniki i Sterowania Laboratorium energoelektroniki Temat ćwiczenia: Przetwornica impulsowa DC-DC typu boost
Wykład Drgania elektromagnetyczne Wstęp Przypomnienie: masa M na sprężynie, bez oporów. Równanie ruchu
 Wykład 7 7. Drgania elektromagnetyczne Wstęp Przypomnienie: masa M na sprężynie, bez oporów. Równanie ruchu M d x kx Rozwiązania x = Acost v = dx/ =-Asint a = d x/ = A cost przy warunku = (k/m) 1/. Obwód
Wykład 7 7. Drgania elektromagnetyczne Wstęp Przypomnienie: masa M na sprężynie, bez oporów. Równanie ruchu M d x kx Rozwiązania x = Acost v = dx/ =-Asint a = d x/ = A cost przy warunku = (k/m) 1/. Obwód
Podstawowe układy energoelektroniczne
 WYKŁAD 3 Podstawowe układy energoelektroniczne Podział ze względu na charakter przebiegów wejściowych i wyjściowych Przebieg wejściowy Przemienny (AC) Przemienny (AC) Stały (DC) Stały (DC) Przebieg wyjściowy
WYKŁAD 3 Podstawowe układy energoelektroniczne Podział ze względu na charakter przebiegów wejściowych i wyjściowych Przebieg wejściowy Przemienny (AC) Przemienny (AC) Stały (DC) Stały (DC) Przebieg wyjściowy
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA
 SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
SILNIK INDUKCYJNY STEROWANY Z WEKTOROWEGO FALOWNIKA NAPIĘCIA Rys.1. Podział metod sterowania częstotliwościowego silników indukcyjnych klatkowych Instrukcja 1. Układ pomiarowy. Dane maszyn: Silnik asynchroniczny:
Dotacje na innowacje. mgr inż. Sebastian Styński Instytut Sterowania i Elektroniki Przemysłowej Politechnika Warszawska
 Dotacje na innowacje Nowe strategie sterowania przekształtnikiem energoelektronicznym z kondensatorami o zmiennym potencjale dla energetyki odnawialnej, napędów i trakcji mgr inż. Sebastian Styński Instytut
Dotacje na innowacje Nowe strategie sterowania przekształtnikiem energoelektronicznym z kondensatorami o zmiennym potencjale dla energetyki odnawialnej, napędów i trakcji mgr inż. Sebastian Styński Instytut
ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI
 1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
1 ĆWICZENIE 15 BADANIE WZMACNIACZY MOCY MAŁEJ CZĘSTOTLIWOŚCI 15.1. CEL ĆWICZENIA Celem ćwiczenia jest poznanie podstawowych właściwości wzmacniaczy mocy małej częstotliwości oraz przyswojenie umiejętności
ĆWICZENIE 1 JEDNOFAZOWE OBWODY RLC. Informatyka w elektrotechnice ZADANIA DO WYKONANIA
 ĆWICZENIE 1 JEDNOFAZOWE OBWODY RLC Celem ćwiczenia jest poznanie zasad symulacji prostych obwodów jednofazowych składających się z elementów RLC. I. Zamodelować jednofazowy szeregowy układ RLC (rys.1a)
ĆWICZENIE 1 JEDNOFAZOWE OBWODY RLC Celem ćwiczenia jest poznanie zasad symulacji prostych obwodów jednofazowych składających się z elementów RLC. I. Zamodelować jednofazowy szeregowy układ RLC (rys.1a)
Laboratorium Wirtualne Obwodów w Stanach Ustalonych i Nieustalonych
 ĆWICZENIE 1 Badanie obwodów jednofazowych rozgałęzionych przy wymuszeniu sinusoidalnym Cel ćwiczenia Celem ćwiczenia jest Poznanie podstawowych elementów pasywnych R, L, C, wyznaczenie ich wartości na
ĆWICZENIE 1 Badanie obwodów jednofazowych rozgałęzionych przy wymuszeniu sinusoidalnym Cel ćwiczenia Celem ćwiczenia jest Poznanie podstawowych elementów pasywnych R, L, C, wyznaczenie ich wartości na
Wydział Elektrotechniki i Automatyki. Katedra Energoelektroniki i Maszyn Elektrycznych
 Wydział Elektrotechniki i Automatyki Katedra Energoelektroniki i Maszyn Elektrycznych Jakość Energii Elektrycznej (Power Quality) I Wymagania, normy, definicje I Parametry jakości energii I Zniekształcenia
Wydział Elektrotechniki i Automatyki Katedra Energoelektroniki i Maszyn Elektrycznych Jakość Energii Elektrycznej (Power Quality) I Wymagania, normy, definicje I Parametry jakości energii I Zniekształcenia
Silniki prądu stałego z komutacją bezstykową (elektroniczną)
") Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
PL B1. Sposób i układ sterowania przemiennika częstotliwości z falownikiem prądu zasilającego silnik indukcyjny
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
Zaznacz właściwą odpowiedź (właściwych odpowiedzi może być więcej niż jedna)
") EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 0/0 Zadania dla grupy elektrycznej na zawody I stopnia Zaznacz właściwą odpowiedź (właściwych odpowiedzi może być więcej
EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 0/0 Zadania dla grupy elektrycznej na zawody I stopnia Zaznacz właściwą odpowiedź (właściwych odpowiedzi może być więcej
5 Filtry drugiego rzędu
 5 Filtry drugiego rzędu Cel ćwiczenia 1. Zrozumienie zasady działania i charakterystyk filtrów. 2. Poznanie zalet filtrów aktywnych. 3. Zastosowanie filtrów drugiego rzędu z układem całkującym Podstawy
5 Filtry drugiego rzędu Cel ćwiczenia 1. Zrozumienie zasady działania i charakterystyk filtrów. 2. Poznanie zalet filtrów aktywnych. 3. Zastosowanie filtrów drugiego rzędu z układem całkującym Podstawy
Stabilizatory impulsowe
 POITECHNIKA BIAŁOSTOCKA Temat i plan wykładu WYDZIAŁ EEKTRYCZNY Jakub Dawidziuk Stabilizatory impulsowe 1. Wprowadzenie 2. Podstawowe parametry i układy pracy 3. Przekształtnik obniżający 4. Przekształtnik
POITECHNIKA BIAŁOSTOCKA Temat i plan wykładu WYDZIAŁ EEKTRYCZNY Jakub Dawidziuk Stabilizatory impulsowe 1. Wprowadzenie 2. Podstawowe parametry i układy pracy 3. Przekształtnik obniżający 4. Przekształtnik
12. Zasilacze. standardy sieci niskiego napięcia tj. sieci dostarczającej energię do odbiorców indywidualnych
 . Zasilacze Wojciech Wawrzyński Wykład z przedmiotu Podstawy Elektroniki - wykład Zasilacz jest to urządzenie, którego zadaniem jest przekształcanie napięcia zmiennego na napięcie stałe o odpowiednich
. Zasilacze Wojciech Wawrzyński Wykład z przedmiotu Podstawy Elektroniki - wykład Zasilacz jest to urządzenie, którego zadaniem jest przekształcanie napięcia zmiennego na napięcie stałe o odpowiednich
Część 5. Mieszane analogowo-cyfrowe układy sterowania
 Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
2.3. Praca samotna. Rys Uproszczony schemat zastępczy turbogeneratora
 E Rys. 2.11. Uproszczony schemat zastępczy turbogeneratora 2.3. Praca samotna Maszyny synchroniczne może pracować jako pojedynczy generator zasilający grupę odbiorników o wypadkowej impedancji Z. Uproszczony
E Rys. 2.11. Uproszczony schemat zastępczy turbogeneratora 2.3. Praca samotna Maszyny synchroniczne może pracować jako pojedynczy generator zasilający grupę odbiorników o wypadkowej impedancji Z. Uproszczony
LABORATORIUM ELEKTROTECHNIKI POMIAR PRZESUNIĘCIA FAZOWEGO
 POLITECHNIKA ŚLĄSKA WYDZIAŁ TRANSPORTU KATEDRA LOGISTYKI I TRANSPORTU PRZEMYSŁOWEGO NR 1 POMIAR PRZESUNIĘCIA FAZOWEGO Katowice, październik 5r. CEL ĆWICZENIA Poznanie zjawiska przesunięcia fazowego. ZESTAW
POLITECHNIKA ŚLĄSKA WYDZIAŁ TRANSPORTU KATEDRA LOGISTYKI I TRANSPORTU PRZEMYSŁOWEGO NR 1 POMIAR PRZESUNIĘCIA FAZOWEGO Katowice, październik 5r. CEL ĆWICZENIA Poznanie zjawiska przesunięcia fazowego. ZESTAW
Wykład 4. Strumień magnetyczny w maszynie synchroniczne magnes trwały, elektromagnes. Magneśnica wirnik z biegunami magnetycznymi. pn 60.
 Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych