Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania
|
|
|
- Kazimiera Szymańska
- 8 lat temu
- Przeglądów:
Transkrypt
: www.ely.pg.gda.pl/kiss/dydaktyka/automatyka2 -")
1 Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Metody i narzędzia diagnostyki procesów dr inż. Michał Grochowski m.grochowski@eia.pg.gda.pl kiss.pg.mg@gmail.com tel: Strona (tymczasowa): -
: www.ely.pg.gda.")
2 Wykorzystane w prezentacji materiały: Venkatasubramanian, V., Rengaswamy, R., Kavuri, S.N. and Yin, K., A review of process fault detection and diagnosis: Part I, Part II, Part I. Computers and Chemical Engineering 27, Korbicz, J., Kościelny, J, Kowalczuk, Z., Cholewa, W. Diagnostyka procesów. Modele, metody sztucznej inteligencji, zastosowania. Wydawnictwa Naukowo Techniczne, Warszawa 2002; Ardakanian i Martin-Bordes, Proceedings of the 2nd Regional Workshop on Water Loss Reduction in Water & Sanitation Utilities 2009; Blanke M.,Kinnaert,M., Lunze, J., Staroswiecki M. Diagnosis and Fault-Tolerant Control. Springer- Verlag, 2006; Krotowski, A. Systemy wizyjne do optycznej inspekcji procesów przemysłowych wykorzystujące zaawansowane metody rozpoznawania obrazu ze szczególnym z uwzględnieniem metod inteligentnych. Praca magisterska, Promotor: dr inż. M. Grochowski; Sikora, M., Grochowski, M. Wykorzystanie sieci neuronowych do diagnostyki poprawności wykonania płytek drukowanych. Pomiary Automatyka Robotyka 2/2011

3 Przykłady awarii/anomalii: w systemach wodociągowych Stosunkowo prosta diagnostyka

4 Przykłady awarii/anomalii: w systemach wodociągowych Przykład pęknięcia będącego źródłem wycieku o natężeniu Q=100m3/h źródło: Ardakanian i Martin-Bordes, 2009

5 Przykłady awarii/anomalii: w systemach wodociągowych Straty wody Niemcy (1999) Dania (1997) Finlandia (1999) Szwecja (2000) Hiszpania Wlk. Brytania Słowacja (1999) Francja (1997) Włochy (2001) Rumunia (1999) Czechy (2000) Irlandia (2000) Węgry (1995) Słowacja (1999) Bułgaria (1996) % zużycia wody Seul (Korea Hong Kong Phnom Penh Taszkent Wientian (Laos) Karaczi Ułan Bator Katmandu Ho Chi Minh Dhaka Kuala Lumpur Dżakarta Delhi Kolombo (Sri Manila % zużycia wody
 Bułgaria (1996) 0 20 40 60 % zużycia wody Seul (Korea Hong Kong Phnom Penh Taszkent Wientian (Laos) Karaczi Ułan")
6 Przykłady awarii/anomalii: w systemach rafineryjnych VARIABLES/SENSORS INCLUDED IN PCA MODEL CATALYST COOLER MONITORING TI BOILER FEED WAT ER PDR Steam Drum STEAM TI FC REGENERATOR CROSS SECTION TEMPERATURE INDICATORS INCLUDED IN PCA MODEL (CATALYST COOLER) CATALYST COOLERS D A C CATALYST COOLERS B źródło: S. Joe Qin. Process Chemometric Techniques and Applications. Department of Chemical Engineering The University of Texas at Austin

7 Przykłady awarii/anomalii: łożysk

8 Przykłady awarii/anomalii: układów elektronicznych źródło: Sikora i Grochowski 2011

9 Przykłady awarii/anomalii: inne przykłady
10 Przykłady awarii/anomalii: inne przykłady
11 Przykłady awarii/anomalii: inne przykłady źródło: Krotowski, A. 2008

12 Przykłady awarii/anomalii: inne przykłady źródło: Krotowski, A. 2008

13 Przykłady awarii/anomalii: inne przykłady źródło: źródło: wp-content/uploads/2012/01/potassiumspectrum-of-ecg-changes.jpg

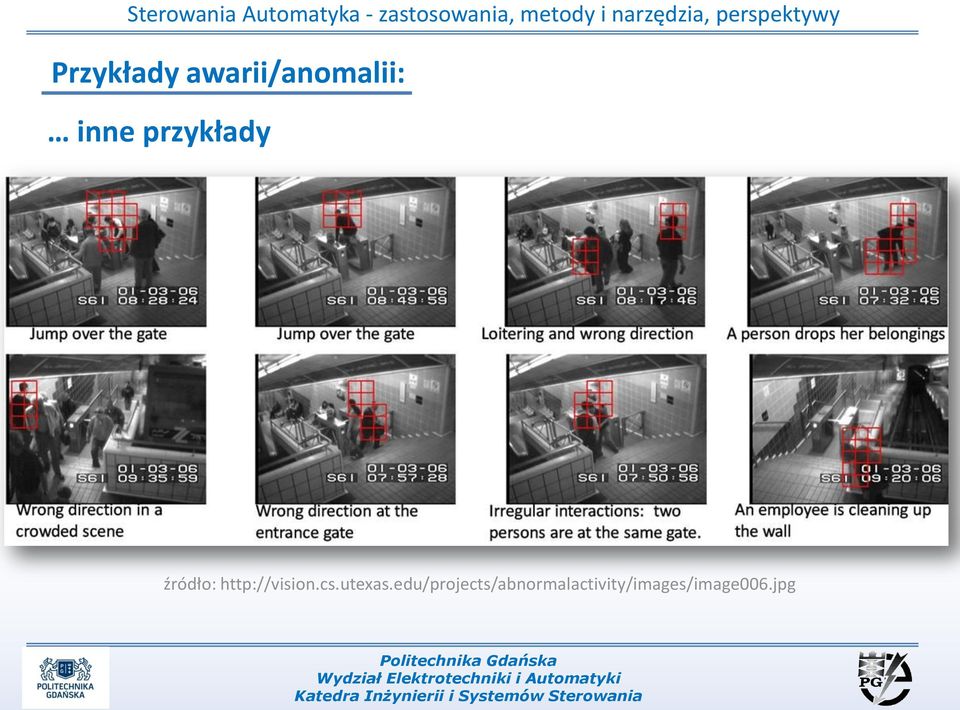
14 Przykłady awarii/anomalii: inne przykłady źródło:
15 Przykłady awarii/anomalii: inne przykłady opencv-lane-vehicle-track programming/lane-detection-with-opencv-and-c/ sequoia.ict.pwr.wroc.pl/ ~witold/aiarr/ 2009_projekty/semafory

16 Przykłady awarii/anomalii: inne przykłady

17 Przykłady awarii/anomalii: inne przykłady
18 Rozpoznawanie twarzy Metoda Resize Najprostsza z metod. Polega na kolejnej redukcji wymiaru danych opisujących zdjęcie (skala odcieni szarości, wyrównywanie histogramem, binaryzacja, siatka redukcyjna) Proces skalowania obrazów: oryginalnego (a) do obrazu w skali szarości (b) o wymiarach 32x32 pikseli (c) o wymiarach 16x16 pikseli (d) źródło: Sikora M. Inteligentny system rozpoznawania twarzy w czasie rzeczywistym implementacja sprzętowa. Praca magisterska, 2012.
 o wymiarach 16x16 pikseli (d) źródło: Sikora M.")
19 Rozpoznawanie twarzy

20 Rozpoznawanie twarzy Metoda Length Metoda bazuje na obliczaniu odległości pomiędzy charakterystycznymi punktami twarzy człowieka. Do poprawnego zadziałania tej metody musimy z wynikiem pozytywnym odnaleźć na twarzy danej osoby takie elementy jak: obydwoje oczu, nos oraz usta. Przy wyszukiwaniu ww. elementów najlepiej skorzystać z estymatora Haar a. L1 L3 L2 źródło: Sikora M. Inteligentny system rozpoznawania twarzy w czasie rzeczywistym implementacja sprzętowa. Praca magisterska, 2012.

21 Rozpoznawanie twarzy Metoda Length Posiadając odnalezione te elementy przystępujemy do obliczenia środka każdego z nich. Następnie obliczana jest odległość pomiędzy środkiem każdego z tych elementów. W celu uniezależnienia wyników od odległości od kamery, a jedynie od kształtu ludzkiej twarzy należy obliczyć stosunki tych odległości. L1 L2 Wykorzystanie trzech zależności: L1/L2; L1/L3; L2/L3. L3 źródło: Sikora M. Inteligentny system rozpoznawania twarzy w czasie rzeczywistym implementacja sprzętowa. Praca magisterska, 2012.
22 Rozpoznawanie twarzy Metoda LBPH Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Przykład transformacji twarzy metodą Local Pattern Binary Histogram w różnych warunkach oświetleniowych źródło: Dokumentacja OpenCV
23 Rozpoznawanie twarzy Metoda LBPH Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Na podstawie: Pietikäinen M.; Hadid A.; Zhao G.; Ahonen T.; "Computer Vision Using Local Binary Patterns", Machine Vision Group, University of Oulu, Finland, 2011 Jako klasyfikator do analizy zdjęć w dziedzinie LBPH, dzieli się obraz na pewną liczbę obszarów i wykorzystuje się porównywanie histogramów. Histogramy zapisane w postaci wektora, o kolejnych elementach będących liczbami pikseli w danym zakresie intensywności, mogą być porównywane w prosty sposób, za pomocą metody Najbliższego Sąsiada. Niekiedy stosuje się także bardziej zaawansowane techniki, jak PCA czy LDA w celu przeniesienia histogramu do innej przestrzeni. źródło: Dokumentacja OpenCV
24 Rozpoznawanie twarzy Metoda LBPH Główną ideą algorytmu jest sumowanie lokalnej struktury zdjęcia poprzez porównywanie każdego piksela z jego sąsiedztwem. Wybierany jest środkowy piksel kwadratowego obszaru (w wersji podstawowej 3x3 pikseli), a jego sąsiedztwo jest poddawane progowaniu. W zależności od tego, czy dany sąsiadujący piksel jest większy od progu, czy nie, przyjmuje wartość 1 lub 0. Następnie odczytuje się liczbę binarną zapisaną dookoła środkowego piksela. Dla ośmiu pikseli sąsiadujących istnieje 256 kombinacji, zwanych Local Binary Patterns. Sposób analizy ramek 3x3 w metodzie LBPH źródło: Hewitt R. How OpenCV s Face Tracker Works, SERVO Magazine, 2007
25 Rozpoznawanie twarzy Metoda Eigenfaces Pierwszą fazą algorytmu jest przygotowanie zbioru zdjęć uczących. Przykładowy zbiór składający się z M=21 zdjęć, o rozmiarach: 100x120 pikseli
26 Rozpoznawanie twarzy Metoda Eigenfaces Kolejną fazą algorytmu jest przekonwertowanie zbioru zdjęć uczących do skali odcieni szarości.
27 Rozpoznawanie twarzy Metoda Eigenfaces Następnie należy obliczyć zdjęcie, będące średnią arytmetyczną wszystkich zdjęć uczących. Ostatnim etapem przygotowywania próbek jest odjęcie od wszystkich zdjęć zdjęcia średniego.
28 Rozpoznawanie twarzy Metoda Eigenfaces Algorytm Dla omawianego przykładu, zbiór dwudziestu wybranych twarzy własnych wygląda następująco: Dla analizowanego przykładu, takie podejście redukuje rozmiar macierzy kowariancji poddanej PCA z 12000x12000 do 20x20. Spośród wektorów własnych, 20 wektorów wystarcza (???) do wiernego (???) przedstawienia obrazu twarzy.
29 Przykładowa twarz i jej wektor wag utworzona przy wykorzystaniu 20 twarzy własnych Rekonstrukcja twarzy polega na odpowiednim przemnożeniu poszczególnych elementów wektora wag przez odpowiadające twarze główne oraz dodaniu twarzy średniej. Przykładowa twarz i jej wektor wag utworzona przy wykorzystaniu 20 twarzy własnych Rekonstrukcja twarzy polega na odpowiednim przemnożeniu poszczególnych elementów wektora wag przez odpowiadające twarze główne oraz dodaniu twarzy średniej. Na podstawie: Błaszkowski P. Wykrywanie, rozpoznawanie i śledzenie ruchomych obiektów poprzez niezależną platformę monitorującą, przy wykorzystaniu sztucznych sieci neuronowych. Praca magisterska, 2013;
30 Przyczyny i skutki stanów awaryjnych/uszkodzeń/anomalii systemów: Przyczyny Skutki Technologiczna złożoność systemu Sprzętowa złożoność systemu Informatyczna złożoność systemu Błędy operatorów Przeciążenie informacyjne operatorów/systemu Oszczędności Niewidoczne gołym okiem skutki uszkodzeń Maskowanie uszkodzeń przez system pomiarowy Stany awaryjne, anormalne Straty ekonomiczne Straty wizerunkowe Skażenie środowiska Uszczerbki na zdrowiu; zagrożenie życia
31 Przykłady awarii/anomalii pęknięcie rury w systemie wodociągowym: Uszkodzenia (lub ich symptomy) bardzo często są niewidoczne nieuzbrojonym okiem Przebieg ciśnienia w węźle pomiarowym oraz dopływających przepływów, przed i w trakcie wycieku o wielkości ok. 1m3/h (1000 l/h). Na szaro zaznaczono okres trwania wycieku źródło: Nowicki, 2010
32 Co będziemy rozumieli przez diagnozowanie Diagnozowanie (rozpoznawanie stanów) traktowane będzie jako proces wykrywania i rozróżniania uszkodzeń obiektu w wyniku zbierania, przetwarzania, analizy i oceny sygnałów diagnostycznych. W zależności od rodzaju obiektu i posiadanej wiedzy na jego temat, wynikiem diagnozowania może być szczegółowa identyfikacja uszkodzenia lub jedynie określenie klasy stanu. Na podstawie: Korbicz i inni, 2002
33 Podział obszarów diagnostyki: Diagnostyka Maszyn Procesów
34 Podział obszarów diagnostyki: Diagnostyka maszyn Zajmuje się oceną stanu urządzeń mechanicznych poprzez badania bezpośrednie ich własności i badania pośrednie procesów towarzyszących funkcjonowaniu tych urządzeń, tzw. procesów resztkowych. Procesy resztkowe mogą mieć charakter mechaniczny, elektryczny, termiczny itp. Szczególną rolę odgrywają procesy wibroakustyczne (drganie, hałas) one najczęściej są wykorzystywane do pośredniej oceny stanu obiektów. Na podstawie: Korbicz i inni, 2002
35 Podział obszarów diagnostyki: Diagnostyka procesów (przemysłowych) Zajmuje się rozpoznawaniem zmian stanów tych procesów, gdzie procesy przemysłowe rozumiane są jako ciąg celowych działań realizowanych w ustalonym czasie przez określony zbiór maszyn i urządzeń przy określonych dostępnych zasobach. Jako przyczyny zmian stanów rozpatrywane są uszkodzenia i inne zdarzenia destrukcyjne. Zadaniem diagnostyki procesów przemysłowych jest wczesne wykrywanie i dokładne rozpoznanie (rozróżnianie) powstających uszkodzeń. Zdarzenia destrukcyjne, takie jak zużycie traktowane są jako pewien rodzaj uszkodzenia, które powinno być wykryte i rozpoznane po przekroczeniu pewnej wartości. Na podstawie: Korbicz i inni, 2002
36 Podział obszarów diagnostyki: Diagnostyka Maszyn Procesów Metody inteligencji obliczeniowej Teoria grafów Automatyka Wiedza Branżowa Informatyka EKF Wielowymiarowe analizy statystyczne Łańcuchy Markowa Diagnostyka techniczna Drzewa uszkodzeń
37 Podstawowe pojęcia: d zakłócenia u wejścia OBIEKT y wyjścia Opis obiektu dynamicznego uwzględniający uszkodzenia f uszkodzenia Schemat obiektu dynamicznego uwzględniający uszkodzenia x ( t) y( t) f [ x( t), u( t), d( t), g[ x( t), u( t), d( t), f f ( t)] ( t)]
38 Podstawowe pojęcia: Stan obiektu Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Stan obiektu/procesu rozumie się jako przynależność do jednego ze zdefiniowanych stanów (np. normalny, zakłóceniowy, awaryjny, ale też: wzmożonych opadów deszczu, oblodzonej nawierzchni ). Stan obiektu/procesu złożonego jest najczęściej określony poprzez zbiór stanów elementów/podzespołów/procesów składowych danego obiektu. Zmiana stanu obiektu może nastąpić wskutek wystąpienia jego uszkodzenia, zużycia oraz innych zdarzeń powodujących inne od zakładanego funkcjonowanie obiektu. Na podstawie: Korbicz i inni, 2002
39 Podstawowe pojęcia: Uszkodzenie obiektu Jako uszkodzenie (fault) rozumiemy każde zdarzenie powodujące pośrednio bądź bezpośrednio niepożądaną zmianę pracy obiektu/procesu. Przykłady uszkodzeń (poza typowymi!!): wyciek wody w sieci dystrybucji wody pitnej, zakłócenie pracy biologicznej oczyszczalni ścieków poprzez dopływ ścieków skażonych metalami ciężkimi, pojawienie się pasożytniczych reakcji w procesie np. fermentacji, brak/przekłamanie danych pomiarowych, niepoprawny skład surowców wejściowych do danego procesu, błędne sterowanie kolumną destylacyjną. Na podstawie: Korbicz i inni, 2002
40 Podstawowe pojęcia: Rozróżniamy następujące klasy uszkodzeń i/lub anomalii: Zmiany parametrów (skompensowanych/zastępczych) w modelu Najczęściej w modelowanych procesach/obiektach występują zjawiska o wyższym stopniu złożoności niż opisują to modele; Czasami wpływ nie ujętych przez model procesów się ujawnia - często pod wpływem nieanalizowanych wcześniej warunków; To implikuje zmiany np. dynamiki modelu, najczęściej w stanach przejściowych. Zmiany strukturalne Zmiany parametrów modeli spowodowane np. zużyciem, czy fizycznym zepsuciem (korozja, zarastanie rur, zatkanie zaworu, wyciek wody, uszkodzenie regulatora, błędy w przepływie informacji ). Uszkodzenia/dysfunkcje/awarie czujników i urządzeń wykonawczych Uszkodzenia czujników lub urządzeń wykonawczych mogą spowodować uszkodzenie obiektu czy też doprowadzenie procesu do niepożądanego stanu (nawet krytycznego). Na podstawie: Venkatasubramanian i inni, 2002
41 Miejsce diagnostyki procesów w strukturze sterowania Algorytm sterujący Akomodacja uszkodzeń Diagnostyka uszkodzeń Sterowanie nadzorujące d f r Regulator u OBIEKT y Schemat systemu sterowania tolerującego uszkodzenia
42 Pożądane cechy systemów diagnostycznych: Na podstawie: Venkatasubramanian i inni, 2002 Szybka detekcja i diagnoza System powinien szybko wykrywać i diagnozować uszkodzenie; Szybkie wykrywanie uszkodzeń i tolerowanie zmian w procesach podczas ich normalnej pracy są najczęściej w sprzeczności; System zaprojektowany żeby wykrywać nagłe zmiany będzie bardzo czuły na zakłócenia o dużej częstotliwości, szumy itp. dużo fałszywych alarmów; Problem analogiczny do znanego z teorii sterowania kompromisu pomiędzy krzepkością a jakością sterowania. Zdolność do izolacji/wyodrębnienia uszkodzenia (Isolability) Zdolność do precyzyjnego wskazania konkretnego uszkodzenia (w warunkach idealnych); Niestety warunków idealnych nie ma (zakłócenia, szumy, niepewności w modelach itp ); Systemy o wysokiej zdolności do rozróżniania uszkodzeń najczęściej słabo dają sobie radę z niepewnością modeli i odwrotnie; Należy znaleźć kompromis. Krzepkość Pożądane jest aby system był odporny na szumy i niepewności; Pożądane jest aby jakość działania systemu zmieniała się stopniowo a nie nagle i gwałtownie; Konieczne jest odpowiednie ustawienie progów czułości systemu.
43 Pożądane cechy systemów diagnostycznych: Na podstawie: Venkatasubramanian i inni, 2002 Zdolność do identyfikacji nowych stanów/zdarzeń/uszkodzeń (Novelty identifiability) Minimalnym wymaganiem dla systemu diagnostycznego jest stwierdzenie czy obiekt/proces działa w stanie normalnym (bezzakłóceniowym) czy też zakłóceniowym; Jeżeli w zakłóceniowym to czy stan ten jest spowodowany poprzez znane uszkodzenie/zakłócenie czy też jakieś nowe; Najczęściej jest wystarczająca ilość danych do zamodelowania stanu normalnej pracy obiektu, ciężko jest natomiast zamodelować wszelkie możliwe stany uszkodzeniowe; Wymaga się aby system co najmniej wskazał że wykryto nowe uszkodzenie (i się go nauczył) a nie zaklasyfikował go (błędnie) do jakiegoś istniejącego stanu. Estymacja błędu klasyfikacji Praktycznym wymogiem jest oszacowanie a priori błędu klasyfikacji; Zwiększa to możliwość wyboru podjęcia decyzji operatorowi procesu (plusy i minusy). Adaptowalność Zdolność systemu do adaptacji do zmieniających się warunków otoczenia; Zdolność systemu do wykorzystywania nowych informacji.
44 Pożądane cechy systemów diagnostycznych: Na podstawie: Venkatasubramanian i inni, 2002 Zdolność systemu do tłumaczenia skutków uszkodzenia (Explanation facility) Zdolność systemu do wnioskowania na temat możliwych skutków wystąpienia danego uszkodzenia czy zdarzenia; Zdolność do wykrywania wielu uszkodzeń (Multiple fault identifiability) Jest to cecha niezwykle pożądana ale bardzo trudna do spełnienia w przypadku dużych systemów; W systemach nieliniowych kolejne uszkodzenia mają wpływ synergetyczny na ich skutki co powoduje trudności w ich rozróżnianiu. Stopień złożoności modeli Czas, nakład pracy a dokładność modeli. Powinien być jak najmniejszy dla konkretnego zastosowania. Wymagania obliczeniowe oraz gromadzenia danych Zdolność do działania w czasie rzeczywistym (operacje numeryczne); Zdolność do gromadzenia danych.
45 Proces diagnozowania: Na podstawie: Venkatasubramanian i inni, 2002 Bardzo ważnymi składnikami procesu diagnozowania są: wiedza a priori o procesie/obiekcie zastosowana technika uczenia/optymalizacji. Generalnie można patrzeć na proces diagnozowania jako na szereg transformacji i odwzorowań dokonywanych na danych pomiarowych
46 Proces diagnozowania: Przestrzeń pomiarów stanowią pomiary x 1, x 2,, x N bez jakiejkolwiek wiedzy a priori o nich; Przestrzeń cech jest przestrzenią punktów y 1, y 2, y i, gdzie y i jest i-tą cechą otrzymaną jako funkcja pomiarów wykorzystująca wiedzę a priori o nich (o rozpatrywanym problemie). Na tym etapie pomiary są przetwarzane z wykorzystaniem wiedzy procesowej, w ten sposób aby, wyciągnąć z niego jak najwięcej użytecznych cech potrzebnych w procesie diagnostyki; Przestrzeń decyzji jest przestrzenią punktów d 1, d 2, d K, gdzie K oznacza liczbę decyzji otrzymanych na podstawie odpowiednich transformacji przestrzeni cech. Transformacja z przestrzeni cech do przestrzeni decyzji jest najczęściej procesem optymalizacji (wynikiem uczenia); Przestrzeń klas jest zbiorem indeksów c 1, c 2,, c M, gdzie M oznacza numer klasy oznaczającej rodzaj uszkodzenia (łącznie ze stanem bezuszkodzeniowym), do której należą analizowane pomiary. Przestrzeń pomiarów (Measurement Space) Przestrzeń cech (Feature Space) Przestrzeń decyzji (Decision Space) Przestrzeń klas (Class Space) [x 1, x 2, x 3,, x N ] [y 1, y 2, y 3,, y i ] [d 1, d 2, d 3,, d K ] [c 1, c 2,, c M ] źródło: Venkatasubramanian i inni, 2002
47 Proces diagnozowania: Tworzenie przestrzeni cech: Wybór cech (Feature selection); Wybieramy najważniejsze (naszym zdaniem) z dostępnych pomiarów; Ekstrakcja cech (Feature extraction) Proces polegający na transformacji przestrzeni pomiarów w przestrzeń cech o mniejszym rozmiarze, np. poprzez odnalezienie jakichś relacji pomiędzy zmiennymi. Jeżeli odnajdziemy takie relacje, dalej w procesie diagnostyki będziemy używać jednej zmiennej zamiast np. 2. do reprezentacji danej zależności. Przestrzeń pomiarów (Measurement Space) Przestrzeń cech (Feature Space) Przestrzeń decyzji (Decision Space) Przestrzeń klas (Class Space) [x 1, x 2, x 3,, x N ] [y 1, y 2, y 3,, y i ] [d 1, d 2, d 3,, d K ] [c 1, c 2,, c M ] źródło: Venkatasubramanian i inni, 2002
48 Przykład: Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Dane są: 4 sensory: x 1, x 2, x 3, x 4 ; 2 klasy uszkodzeń: c 1 oraz c 2, które należy rozróżnić; Załóżmy że uszkodzenie 1 zakłóca czujnik 1 i 2 i że uszkodzenie 2 zakłóca czujnik 2 i 3; Załóżmy, że x 1ss, x 2ss, x 3ss, x 4ss ; oznaczają wartości czujników w stanach ustalonych; Najprostszą transformacją z przestrzeni pomiarów do przestrzeni cech jest pominiecie czujnika x 4 ; Transformacja z przestrzeni cech do przestrzeni decyzji [d 1 d 2 d 3 ] może wyglądać tak: IF abs(y i - x iss )>T THEN d i =1, ELSE d i =0; Ostatnia transformacja z przestrzeni decyzji do przestrzeni klas może wyglądać tak: IF (d1 AND d2) THEN c1 IF (d2 AND d3) THEN c2 Przestrzeń pomiarów (Measurement Space) Przestrzeń cech (Feature Space) Przestrzeń decyzji (Decision Space) Przestrzeń klas (Class Space) [x 1, x 2, x 3, x 4 ] [y 1, y 2, y 3 ] = [x 1, x 2, x 3 ] [d 1, d 2, d 3 ] [c 1, c 2 ] źródło: Venkatasubramanian i inni, 2002
49 Przestrzeń pomiarów, przestrzeń cech - ilustracja: Przestrzeń pomiarów : [x] [x,sin(x)] Przestrzeń cech Zredukowana przestrzeń cech źródło: Nowicki i Grochowski, 2011
50 Etapy procesu diagnozowania: Fazy diagnozowania obiektów (FDD Fault Detection and Diagnosis): Detekcja uszkodzenia (fault detection) Wykrycie, zauważanie powstania uszkodzenia w obiekcie i określenie chwili detekcji. Lokalizacja/wyodrębnienie uszkodzenia (fault isolation) Określenie rodzaju, miejsca i czasu wystąpienia uszkodzenia. Identyfikacja uszkodzenia (fault identification) Określenie rozmiaru i charakteru zmienności uszkodzenia w czasie. (źródło: Korbicz i inni, 2002) Dodatkowo przy sterowaniu odpornym (FTC Fault Tolerant Control) Kompensacja zakłóceń (fault accomodation) Rekonfiguracja systemu sterowania (control reconfiguration)
51 Schemat procesu podejmowania decyzji w FTC: Algorytm sterujący Akomodacja uszkodzeń Diagnostyka uszkodzeń Sterowanie nadzorujące d f r Regulator u OBIEKT y Schemat systemu sterowania tolerującego uszkodzenia
52 Etapy procesu podejmowania decyzji w sterowaniu FTC: Trajektoria referencyjna Wyjście Stan bezuskodzeniowy Czas Trajektoria rzeczywista Moment uszkodzenia Detekcja uszkodzenia Izolacjaidentyfikacja uszkodzenia System pracuje normalnie Nastąpiło uszkodzenie ale nie zostało jeszcze wykryte; System sterowania powinien co najmniej zachować ograniczoność sygnału wyjścia Wykryto uszkodzenie ale nie jest jeszcze znany jego rodzaj i miejsce; Regulator dokonuje rekonfiguracji tak aby odzyskać jak największą jakość sterowania Uszkodzenie zostało wyizolowane i zidentyfikowane; Regulator dokonuje ostatecznej rekonfiguracji; Odzyskuje maksymalną możliwą jakość sterowania.
53 Etapy procesu podejmowania decyzji w sterowaniu FTC: Przykład Pompa P powoduje napływ cieczy q p do Zbiornika 1 (Z1); u(t) określa prędkość pompy; u jest zdeterminowane przez wyłącznik bezpieczeństwa chroniący przed przelewem Z1; Wejściem do systemu są pozycje zaworów V a i V 12 ; W normalnym stanie pracy układu (bezuszkodzeniowym) V a jest zamknięty a zawór V 12 jest używany do sterowania poziomem cieczy w Z2 utrzymywania poziomu na zadanym poziomie; V 12 jest używany do napełnienia i opróżniania Z2, Z1 jest zbiornikiem retencyjnym który jest napełniany do h max (wyłącznik awaryjny wyłącza wtedy pompę); V a jest używany jedynie podczas awarii; Rozważane są dwa typy uszkodzeń: Wyciek z Z1, powodujący q l ; Zablokowanie zaworu V 12 w pozycji zamkniętej. Zbiornik 1 System dwóch zbiorników źródło: Blanke i inni, 2006 Zbiornik 2
54 Problemy: Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Etapy procesu podejmowania decyzji w sterowaniu FTC: Celem sterowania jest utrzymywanie poziomu cieczy w Z2 niezależnie od wystąpienia uszkodzeń; Rozważ możliwości wykrycia uszkodzeń przy różnych wariantach opomiarowania: q M, q M, h 1, h 2 q M, h 1, h 2, q p. Zbiornik 1 Zbiornik 2 Zaproponuj sposób kompensacji uszkodzenia; Zaproponuj sposób rekonfiguracji systemu sterowania. System dwóch zbiorników źródło: Blanke i inni, 2006
55 Etapy procesu podejmowania decyzji w sterowaniu FTC: Detekcja uszkodzenia (Fault detection) Ustalenie czy nastąpiło uszkodzenie i kiedy. Wyodrębnienie uszkodzenia (Fault isolation) Ustalenie która z części systemu jest uszkodzona. Zbiornik 1 Zbiornik 2 Identyfikacja uszkodzenia (Fault identification) Ustalenie np. rozmiaru wycieku (czasu, kształtu ). System dwóch zbiorników źródło: Blanke i inni, 2006
56 Etapy procesu podejmowania decyzji w sterowaniu FTC: Kompensacja uszkodzenia (Fault accomodation) W przypadku wycieku banalne - przy założeniu że pompa ma wystarczającą moc, tylko że. Zbiornik 1 Zbiornik 2 Rekonfiguracja systemu sterowania (Control reconfiguration) W przypadku awarii zaworu musimy użyć zaworu V a. Powinno to nastąpić automatycznie, natychmiast po identyfikacji uszkodzenia. System dwóch zbiorników źródło: Blanke i inni, 2006
57 Klasyfikacja algorytmów diagnostycznych Metody diagnostyki Wykorzystujące modele Wykorzystujące dane pomiarowe
58 Klasyfikacja algorytmów diagnostycznych Schemat diagnozowania z wykorzystaniem modeli procesu U - wejścia F - uszkodzenia PROCES Y - wyjścia Model obiektu Generacja residuów R - Residua Klasyfikator R S Ocena wartości residuów S - Sygnały diagnostyczne Relacja S F Lokalizacja uszkodzeń F - Uszkodzenie źródło: Korbicz i inni, 2002
59 Klasyfikacja algorytmów diagnostycznych Schemat diagnozowania z detekcją bez wykorzystania modeli procesu U - wejścia F - uszkodzenia PROCES Y - wyjścia Klasyfikator UUY S Generacja sygnałów diagnostycznych S - Sygnały diagnostyczne Relacja S F Lokalizacja uszkodzeń F - Rodzaje uszkodzeń źródło: Korbicz i inni, 2002
60 Klasyfikacja algorytmów diagnostycznych Diagnostyka jako proces rozpoznawania wzorców F - uszkodzenia U - wejścia PROCES Y - wyjścia X zmienne procesowe Ekstrakcja sygnałów diagnostycznych Sygnały diagnostyczne Obrazy wzorcowe dla uszkodzeń Klasyfikacja Rodzaje uszkodzeń źródło: Korbicz i inni, 2002
61 Przykład detekcja i identyfikacja uszkodzeń łożysk tocznych silnika indukcyjnego źródło: Use of neural networks in diagnostics of rolling-element bearing of the induction motor. L.Swędrowski, K.Duzinkiewicz,M.Grochowski,T.Rutkowski. V Międzynarodowy Kongres Diagnostyki Technicznej Kraków Przykłady uszkodzeń łożysk
62 i [A] i [A] i c [A] i [A] i b [A] i a [A] Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Diagnostyka jako proces rozpoznawania wzorców Przykład detekcja i identyfikacja uszkodzeń łożysk tocznych silnika indukcyjnego 2 i a (t) t [sec] i (t) b i (t) t [sec] i (t) c t [sec] Prądy zasilania silnika trójfazowego t [sec] i (t) t [sec] Clark vector curve i = f(i ) Transformacja Clarka i [A] Wektory Clarka
63 i [A] i [A] i [A] Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Diagnostyka jako proces rozpoznawania wzorców Przykład detekcja i identyfikacja uszkodzeń łożysk tocznych silnika indukcyjnego Clark vector curve i = f(i ) Uszkodzenie pierścienia wewnętrznego Clark vector curve i = f(i ) i [A] Uszkodzenie kulki Uszkodzenie pierścienia zewnętrznego Clark vector curve i = f(i ) i [A] i [A]
64 i [A] Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Diagnostyka jako proces rozpoznawania wzorców Przykład detekcja i identyfikacja uszkodzeń łożysk tocznych silnika indukcyjnego Neuronowy system diagnostyczny 2.5 Clark vector curve i = f(i ) i [A] Wektory Clarka Sztuczna sieć neuronowa Nieuszkodzone Uszkodzone Uszkodzenie wewnętrznego łożyska Uszkodzenie zewnętrznego łożyska Uszkodzenie kulki
65 Diagnostyka jako proces rozpoznawania wzorców Przykład detekcja i identyfikacja uszkodzeń łożysk tocznych silnika indukcyjnego Neuronowy system diagnostyczny Dane wejściowe (Wektory Clarka) Silnik indukcyjny wyjścia (wskaźnik uszkodzenia<-1, 1>) Model neuronowy 0 sprawny silnik Model neuronowy 1 uszkodzenie pierścienia zewnętrznego Model neuronowy 2 uszkodzenie pierścienia wewnętrznego Model neuronowy 3 uszkodzenie kulki
66 Klasyfikacja algorytmów diagnostycznych Metody diagnostyki Wykorzystujące modele Wykorzystujące dane pomiarowe Ilościowe Jakościowe Jakościowe Ilościowe Obserwatory EKF Przyczynowo skutkowe Abstraction hierarchy Sieci neuronowe Parity Space Digrafy Qualitative Physics Systemy ekspertowe QTA Qualitative trend analysis Statystyczne Drzewa uszkodzeń Strukturalne Funkcjonalne PCA/PLS Klasyfikatory statystyczne źródło: Venkatasubramanian i inni, 2002
67 Klasyfikacja algorytmów diagnostycznych: Metody ilościowe wykorzystujące modele Obserwatory Filtry Kalmana Parity Space
68 Metody ilościowe wykorzystujące modele Parity space (Parity equations równania zgodności) Podejście wykorzystujące obserwatory i/lub Filtry Kalmana Podejście poprzez estymację parametrów
69 Metody ilościowe wykorzystujące modele Banki obserwatorów Urządzenia wykonawcze Proces Czujniki pomiarowe Obserwator 1 Obserwator 2 Decyzje logiczne Obserwator n
70 Metody ilościowe wykorzystujące modele Podsumowanie: W diagnostyce stosuje się modele typu wejście-wyjście, modele w przestrzeni stanu, modele fenomenologiczne, modele częstotliwościowe Modele fenomenologiczne są rzadko używane ze względu na trudności z uzyskaniem odpowiednio dokładnych modeli i z dużym obciążeniem obliczeniowym przy ich wykorzystaniu; Najbardziej popularnymi modelami w tej grupie są modele wejście-wyjście oraz modele w przestrzeni stanu; Posiadając model, najczęściej w procesie diagnozowania występują dwa kroki: Generacja residuów (redundancja analityczna ); Wybór odpowiedniej reguły podejmowania decyzji. W stanie bezuszkodzeniowej pracy systemu, residua powinny oscylować wokół zera. Wystąpienie uszkodzenia zmienia relacje pomiędzy zmiennymi co powoduje powstanie niezerowych wartości residuów; Wykorzystywane modele mogą być typu white box lub black box co implikuje późniejszą zdolność do izolacji uszkodzeń; Większość modeli diagnostycznych jest liniowa lub wymaga linearyzacji w punkcie pracy.
71 Ogólna charakterystyka modeli i ich wykorzystania do diagnostyki: Podsumowanie: Schematy diagnozowania w tym podejściu najczęściej sprowadzają się do estymacji zmiennych stanu i parametrów, filtracji, adaptacyjnej filtracji itp. Często tworzone są banki obserwatorów przystosowanych do wykrywania konkretnego uszkodzenia; Najbardziej efektywnymi modelami wydają się być Filtry Kalmana (rozszerzone); Najważniejszą zaletą podejścia z wykorzystaniem modeli ilościowych jest fakt iż posiadamy duża kontrolę i przejrzystość procesu diagnozowania; Największą wadą jest praktyczna ograniczoność do modeli liniowych i pewnej klasy modeli nieliniowych.
dr inż. Michał Grochowski
 Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Metody i narzędzia diagnostyki procesów dr inż. Michał Grochowski m.grochowski@eia.pg.gda.pl
Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Metody i narzędzia diagnostyki procesów dr inż. Michał Grochowski m.grochowski@eia.pg.gda.pl
Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji
 Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Analiza składników podstawowych - wprowadzenie (Principal Components Analysis
Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Analiza składników podstawowych - wprowadzenie (Principal Components Analysis
Monitorowanie i Diagnostyka w Systemach Sterowania
 Monitorowanie i Diagnostyka w Systemach Sterowania Metody i narzędzia diagnostyki procesów Katedra Inżynierii Systemów Sterowania Dr inż. Michał Grochowski Monitorowanie i Diagnostyka w Systemach Sterowania
Monitorowanie i Diagnostyka w Systemach Sterowania Metody i narzędzia diagnostyki procesów Katedra Inżynierii Systemów Sterowania Dr inż. Michał Grochowski Monitorowanie i Diagnostyka w Systemach Sterowania
Diagnostyka procesów i jej zadania
 Instytut Sterowania i Systemów Informatycznych Uniwersytet Zielonogórski Wykład 1 Literatura 1 J. Korbicz, J.M. Kościelny, Z. Kowalczuk, W. Cholewa (red.): Diagnostyka procesów. Modele, metody sztucznej
Instytut Sterowania i Systemów Informatycznych Uniwersytet Zielonogórski Wykład 1 Literatura 1 J. Korbicz, J.M. Kościelny, Z. Kowalczuk, W. Cholewa (red.): Diagnostyka procesów. Modele, metody sztucznej
Wykład wprowadzający
 Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Wykład wprowadzający dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Wykład wprowadzający dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji
 Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Metody i narzędzia diagnostyki procesów dr inż. Michał Grochowski m.grochowski@eia.pg.gda.pl
Monitorowanie i Diagnostyka w Systemach Sterowania na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Metody i narzędzia diagnostyki procesów dr inż. Michał Grochowski m.grochowski@eia.pg.gda.pl
DiaSter - system zaawansowanej diagnostyki aparatury technologicznej, urządzeń pomiarowych i wykonawczych. Politechnika Warszawska
 Jan Maciej Kościelny, Michał Syfert DiaSter - system zaawansowanej diagnostyki aparatury technologicznej, urządzeń pomiarowych i wykonawczych Instytut Automatyki i Robotyki Plan wystąpienia 2 Wprowadzenie
Jan Maciej Kościelny, Michał Syfert DiaSter - system zaawansowanej diagnostyki aparatury technologicznej, urządzeń pomiarowych i wykonawczych Instytut Automatyki i Robotyki Plan wystąpienia 2 Wprowadzenie
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych
 Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Diagnostyka procesów przemysłowych Kod przedmiotu
 Diagnostyka procesów przemysłowych - opis przedmiotu Informacje ogólne Nazwa przedmiotu Diagnostyka procesów przemysłowych Kod przedmiotu 06.0-WE-AiRP-DPP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Diagnostyka procesów przemysłowych - opis przedmiotu Informacje ogólne Nazwa przedmiotu Diagnostyka procesów przemysłowych Kod przedmiotu 06.0-WE-AiRP-DPP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Automatyka - zastosowania, metody i narzędzia, perspektywy
 Automatyka - zastosowania, metody i narzędzia, perspektywy Katedra Inżynierii Systemów Sterowania Dr inż. Michał Grochowski Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Metody
Automatyka - zastosowania, metody i narzędzia, perspektywy Katedra Inżynierii Systemów Sterowania Dr inż. Michał Grochowski Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Metody
Pattern Classification
 Pattern Classification All materials in these slides were taken from Pattern Classification (2nd ed) by R. O. Duda, P. E. Hart and D. G. Stork, John Wiley & Sons, 2000 with the permission of the authors
Pattern Classification All materials in these slides were taken from Pattern Classification (2nd ed) by R. O. Duda, P. E. Hart and D. G. Stork, John Wiley & Sons, 2000 with the permission of the authors
Transformacja wiedzy w budowie i eksploatacji maszyn
 Uniwersytet Technologiczno Przyrodniczy im. Jana i Jędrzeja Śniadeckich w Bydgoszczy Wydział Mechaniczny Transformacja wiedzy w budowie i eksploatacji maszyn Bogdan ŻÓŁTOWSKI W pracy przedstawiono proces
Uniwersytet Technologiczno Przyrodniczy im. Jana i Jędrzeja Śniadeckich w Bydgoszczy Wydział Mechaniczny Transformacja wiedzy w budowie i eksploatacji maszyn Bogdan ŻÓŁTOWSKI W pracy przedstawiono proces
AUTOMATYCZNE ROZPOZNAWANIE PUNKTÓW KONTROLNYCH GŁOWY SŁUŻĄCYCH DO 3D MODELOWANIA JEJ ANATOMII I DYNAMIKI
 AUTOMATYCZNE ROZPOZNAWANIE PUNKTÓW KONTROLNYCH GŁOWY SŁUŻĄCYCH DO 3D MODELOWANIA JEJ ANATOMII I DYNAMIKI Tomasz Huczek Promotor: dr Adrian Horzyk Cel pracy Zasadniczym celem pracy było stworzenie systemu
AUTOMATYCZNE ROZPOZNAWANIE PUNKTÓW KONTROLNYCH GŁOWY SŁUŻĄCYCH DO 3D MODELOWANIA JEJ ANATOMII I DYNAMIKI Tomasz Huczek Promotor: dr Adrian Horzyk Cel pracy Zasadniczym celem pracy było stworzenie systemu
Rozpoznawanie obrazów na przykładzie rozpoznawania twarzy
 Rozpoznawanie obrazów na przykładzie rozpoznawania twarzy Wykorzystane materiały: Zadanie W dalszej części prezentacji będzie omawiane zagadnienie rozpoznawania twarzy Problem ten można jednak uogólnić
Rozpoznawanie obrazów na przykładzie rozpoznawania twarzy Wykorzystane materiały: Zadanie W dalszej części prezentacji będzie omawiane zagadnienie rozpoznawania twarzy Problem ten można jednak uogólnić
Stosowane metody wykrywania nieszczelności w sieciach gazowych
 Stosowane metody wykrywania nieszczelności w sieciach gazowych Andrzej Osiadacz, Łukasz Kotyński Zakład Systemów Ciepłowniczych i Gazowniczych Wydział Inżynierii Środowiska Politechniki Warszawskiej Międzyzdroje,
Stosowane metody wykrywania nieszczelności w sieciach gazowych Andrzej Osiadacz, Łukasz Kotyński Zakład Systemów Ciepłowniczych i Gazowniczych Wydział Inżynierii Środowiska Politechniki Warszawskiej Międzyzdroje,
Modele ilościowe i jakościowe w diagnostyce procesów przemysłowych
 pro. dr hab. inż. Jan Maciej Kościelny Wydział Mechatroniki Modele ilościowe i jakościowe w diagnostyce procesów przemysłowych Problemy, metody i obliczenia wielkoskalowe oraz wyzwania modelowania inżynierskiego
pro. dr hab. inż. Jan Maciej Kościelny Wydział Mechatroniki Modele ilościowe i jakościowe w diagnostyce procesów przemysłowych Problemy, metody i obliczenia wielkoskalowe oraz wyzwania modelowania inżynierskiego
Rozpoznawanie wzorców i twarzy
 Systemy Inżynierii wiedzy na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Rozpoznawanie wzorców i twarzy w wykładzie wykorzystano materiały z następujących prac inżynierskich/magisterskich:
Systemy Inżynierii wiedzy na studiach II stopnia specjalności: Systemy Sterowania i Podejmowania Decyzji Rozpoznawanie wzorców i twarzy w wykładzie wykorzystano materiały z następujących prac inżynierskich/magisterskich:
BIBLIOTEKA PROGRAMU R - BIOPS. Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat
 BIBLIOTEKA PROGRAMU R - BIOPS Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat Biblioteka biops zawiera funkcje do analizy i przetwarzania obrazów. Operacje geometryczne (obrót, przesunięcie,
BIBLIOTEKA PROGRAMU R - BIOPS Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat Biblioteka biops zawiera funkcje do analizy i przetwarzania obrazów. Operacje geometryczne (obrót, przesunięcie,
Wykład organizacyjny
 Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Wykład organizacyjny dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
Automatyka - zastosowania, metody i narzędzia, perspektywy na studiach I stopnia specjalności: Automatyka i systemy sterowania Wykład organizacyjny dr inż. Michał Grochowski kiss.pg.mg@gmail.com michal.grochowski@pg.gda.pl
Filtracja obrazu operacje kontekstowe
 Filtracja obrazu operacje kontekstowe Podział metod filtracji obrazu Metody przestrzenne i częstotliwościowe Metody liniowe i nieliniowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu
Filtracja obrazu operacje kontekstowe Podział metod filtracji obrazu Metody przestrzenne i częstotliwościowe Metody liniowe i nieliniowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Podstawy diagnostyki środków transportu
 Podstawy diagnostyki środków transportu Diagnostyka techniczna Termin "diagnostyka" pochodzi z języka greckiego, gdzie diagnosis rozróżnianie, osądzanie. Ukształtowana już w obrębie nauk eksploatacyjnych
Podstawy diagnostyki środków transportu Diagnostyka techniczna Termin "diagnostyka" pochodzi z języka greckiego, gdzie diagnosis rozróżnianie, osądzanie. Ukształtowana już w obrębie nauk eksploatacyjnych
Efekty kształcenia na kierunku AiR drugiego stopnia - Wiedza Wydziału Elektrotechniki, Automatyki i Informatyki Politechniki Opolskiej
 Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Prof. Stanisław Jankowski
 Prof. Stanisław Jankowski Zakład Sztucznej Inteligencji Zespół Statystycznych Systemów Uczących się p. 228 sjank@ise.pw.edu.pl Zakres badań: Sztuczne sieci neuronowe Maszyny wektorów nośnych SVM Maszyny
Prof. Stanisław Jankowski Zakład Sztucznej Inteligencji Zespół Statystycznych Systemów Uczących się p. 228 sjank@ise.pw.edu.pl Zakres badań: Sztuczne sieci neuronowe Maszyny wektorów nośnych SVM Maszyny
WYKŁAD 12. Analiza obrazu Wyznaczanie parametrów ruchu obiektów
 WYKŁAD 1 Analiza obrazu Wyznaczanie parametrów ruchu obiektów Cel analizy obrazu: przedstawienie każdego z poszczególnych obiektów danego obrazu w postaci wektora cech dla przeprowadzenia procesu rozpoznania
WYKŁAD 1 Analiza obrazu Wyznaczanie parametrów ruchu obiektów Cel analizy obrazu: przedstawienie każdego z poszczególnych obiektów danego obrazu w postaci wektora cech dla przeprowadzenia procesu rozpoznania
POPRAWA EFEKTYWNOŚCI EKSPLOATACJI MASZYN
 POPRAWA EFEKTYWNOŚCI EKSPLOATACJI MASZYN AGENDA 1. O NAS 2. IDEA ELMODIS 3. SYSTEM ELMODIS 4. KORZYŚCI ELMODIS 5. ZASTOSOWANIE ELMODIS O NAS ELMODIS TO ZESPÓŁ INŻYNIERÓW I SPECJALISTÓW Z DŁUGOLETNIM DOŚWIADCZENIEM
POPRAWA EFEKTYWNOŚCI EKSPLOATACJI MASZYN AGENDA 1. O NAS 2. IDEA ELMODIS 3. SYSTEM ELMODIS 4. KORZYŚCI ELMODIS 5. ZASTOSOWANIE ELMODIS O NAS ELMODIS TO ZESPÓŁ INŻYNIERÓW I SPECJALISTÓW Z DŁUGOLETNIM DOŚWIADCZENIEM
USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO
 USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO Przykład zintegrowanego systemu mechatronicznego Michał Bartyś Wprowadzenie Schemat blokowy Funkcje ustawnika Model przyczynowo-skutkowy Środowisko
USTAWNIK TOLERUJĄCY USZKODZENIA TORU SPRZĘśENIA ZWROTNEGO Przykład zintegrowanego systemu mechatronicznego Michał Bartyś Wprowadzenie Schemat blokowy Funkcje ustawnika Model przyczynowo-skutkowy Środowisko
Implementacja filtru Canny ego
 ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy prosty i skuteczny.
 Filtracja nieliniowa może być bardzo skuteczną metodą polepszania jakości obrazów Filtry nieliniowe Filtr medianowy Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy
Filtracja nieliniowa może być bardzo skuteczną metodą polepszania jakości obrazów Filtry nieliniowe Filtr medianowy Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy
Samochodowy system detekcji i rozpoznawania znaków drogowych. Sensory w budowie maszyn i pojazdów Maciej Śmigielski
 Samochodowy system detekcji i rozpoznawania znaków drogowych Sensory w budowie maszyn i pojazdów Maciej Śmigielski Rozpoznawanie obrazów Rozpoznawaniem obrazów możemy nazwać proces przetwarzania i analizowania
Samochodowy system detekcji i rozpoznawania znaków drogowych Sensory w budowie maszyn i pojazdów Maciej Śmigielski Rozpoznawanie obrazów Rozpoznawaniem obrazów możemy nazwać proces przetwarzania i analizowania
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH
 AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
Oprócz funkcjonalności wymaganych przez zamawiających, urządzenia Hikvision oferują dodatkowo następujące funkcjonalności:
 Oprócz funkcjonalności wymaganych przez zamawiających, urządzenia Hikvision oferują dodatkowo następujące funkcjonalności: 1. DS-2CD4224F-IZHS a) Moduł inteligentnej, samouczącej się detekcji ruchu Detekcja
Oprócz funkcjonalności wymaganych przez zamawiających, urządzenia Hikvision oferują dodatkowo następujące funkcjonalności: 1. DS-2CD4224F-IZHS a) Moduł inteligentnej, samouczącej się detekcji ruchu Detekcja
Bogdan ŻÓŁTOWSKI Marcin ŁUKASIEWICZ
 Bogdan ŻÓŁTOWSKI Bogdan ŻÓŁTOWSKI DIAGNOSTYKA DRGANIOWA MASZYN pamięci Stanisława BYDGOSZCZ 2012 Prof. dr hab. inż. Bogdan ŻÓŁTOWSKI UTP WIM Bydgoszcz Dr inż. UTP WIM Bydgoszcz DIAGNOSTYKA DRGANIOWA MASZYN
Bogdan ŻÓŁTOWSKI Bogdan ŻÓŁTOWSKI DIAGNOSTYKA DRGANIOWA MASZYN pamięci Stanisława BYDGOSZCZ 2012 Prof. dr hab. inż. Bogdan ŻÓŁTOWSKI UTP WIM Bydgoszcz Dr inż. UTP WIM Bydgoszcz DIAGNOSTYKA DRGANIOWA MASZYN
mgr inż. Magdalena Deckert Poznań, r. Uczenie się klasyfikatorów przy zmieniającej się definicji klas.
 mgr inż. Magdalena Deckert Poznań, 01.06.2010r. Uczenie się klasyfikatorów przy zmieniającej się definicji klas. Plan prezentacji Wstęp Concept drift Typy zmian Podział algorytmów stosowanych w uczeniu
mgr inż. Magdalena Deckert Poznań, 01.06.2010r. Uczenie się klasyfikatorów przy zmieniającej się definicji klas. Plan prezentacji Wstęp Concept drift Typy zmian Podział algorytmów stosowanych w uczeniu
Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia
 modułu/przedmiotu Transport Studia I stopnia") Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia Przedmiot: Diagnostyka techniczna Rodzaj przedmiotu: Podstawowy/obowiązkowy Kod przedmiotu: TR 1 S 0 4 9-0_1 Rok: Semestr: 4 Forma studiów:
Karta (sylabus) modułu/przedmiotu Transport Studia I stopnia Przedmiot: Diagnostyka techniczna Rodzaj przedmiotu: Podstawowy/obowiązkowy Kod przedmiotu: TR 1 S 0 4 9-0_1 Rok: Semestr: 4 Forma studiów:
ANALIZA METOD DETEKCJI I LOKALIZACJI USZKODZEŃ W SYSTEMACH PRODUKCYJNYCH ODLEWNI
 39/10 Archives of Foundry, Year 2003, Volume 3, 10 Archiwum Odlewnictwa, Rok 2003, Rocznik 3, Nr 10 PAN Katowice PL ISSN 1642-5308 ANALIZA METOD DETEKCJI I LOKALIZACJI USZKODZEŃ W SYSTEMACH PRODUKCYJNYCH
39/10 Archives of Foundry, Year 2003, Volume 3, 10 Archiwum Odlewnictwa, Rok 2003, Rocznik 3, Nr 10 PAN Katowice PL ISSN 1642-5308 ANALIZA METOD DETEKCJI I LOKALIZACJI USZKODZEŃ W SYSTEMACH PRODUKCYJNYCH
Widzenie komputerowe (computer vision)
") Widzenie komputerowe (computer vision) dr inż. Marcin Wilczewski 2018/2019 Organizacja zajęć Tematyka wykładu Cele Python jako narzędzie uczenia maszynowego i widzenia komputerowego. Binaryzacja i segmentacja
Widzenie komputerowe (computer vision) dr inż. Marcin Wilczewski 2018/2019 Organizacja zajęć Tematyka wykładu Cele Python jako narzędzie uczenia maszynowego i widzenia komputerowego. Binaryzacja i segmentacja
SYSTEM BIOMETRYCZNY IDENTYFIKUJĄCY OSOBY NA PODSTAWIE CECH OSOBNICZYCH TWARZY. Autorzy: M. Lewicka, K. Stańczyk
 SYSTEM BIOMETRYCZNY IDENTYFIKUJĄCY OSOBY NA PODSTAWIE CECH OSOBNICZYCH TWARZY Autorzy: M. Lewicka, K. Stańczyk Kraków 2008 Cel pracy projekt i implementacja systemu rozpoznawania twarzy, który na podstawie
SYSTEM BIOMETRYCZNY IDENTYFIKUJĄCY OSOBY NA PODSTAWIE CECH OSOBNICZYCH TWARZY Autorzy: M. Lewicka, K. Stańczyk Kraków 2008 Cel pracy projekt i implementacja systemu rozpoznawania twarzy, który na podstawie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
S O M SELF-ORGANIZING MAPS. Przemysław Szczepańczyk Łukasz Myszor
 S O M SELF-ORGANIZING MAPS Przemysław Szczepańczyk Łukasz Myszor Podstawy teoretyczne Map Samoorganizujących się stworzył prof. Teuvo Kohonen (1982 r.). SOM wywodzi się ze sztucznych sieci neuronowych.
S O M SELF-ORGANIZING MAPS Przemysław Szczepańczyk Łukasz Myszor Podstawy teoretyczne Map Samoorganizujących się stworzył prof. Teuvo Kohonen (1982 r.). SOM wywodzi się ze sztucznych sieci neuronowych.
Algorytm indukcji klasyfikatora za pomocą EA z automatycznym przełączaniem ukierunkowań
 Algorytm indukcji klasyfikatora za pomocą EA z automatycznym przełączaniem ukierunkowań Anna Manerowska, Michal Kozakiewicz 2.12.2009 1 Wstęp Jako projekt na przedmiot MEUM (Metody Ewolucyjne Uczenia Maszyn)
Algorytm indukcji klasyfikatora za pomocą EA z automatycznym przełączaniem ukierunkowań Anna Manerowska, Michal Kozakiewicz 2.12.2009 1 Wstęp Jako projekt na przedmiot MEUM (Metody Ewolucyjne Uczenia Maszyn)
Zastosowanie metod eksploracji danych (data mining) do sterowania i diagnostyki procesów w przemyśle spożywczym
 do sterowania i diagnostyki procesów w przemyśle spożywczym") POLITECHNIKA WARSZAWSKA Instytut Technik Wytwarzania Zastosowanie metod eksploracji danych (data mining) do sterowania i diagnostyki procesów w przemyśle spożywczym Marcin Perzyk Dlaczego eksploracja danych?
POLITECHNIKA WARSZAWSKA Instytut Technik Wytwarzania Zastosowanie metod eksploracji danych (data mining) do sterowania i diagnostyki procesów w przemyśle spożywczym Marcin Perzyk Dlaczego eksploracja danych?
Modelowanie glikemii w procesie insulinoterapii
 Dawid Kaliszewski Modelowanie glikemii w procesie insulinoterapii Promotor dr hab. inż. Zenon Gniazdowski Cel pracy Zbudowanie modelu predykcyjnego przyszłych wartości glikemii diabetyka leczonego za pomocą
Dawid Kaliszewski Modelowanie glikemii w procesie insulinoterapii Promotor dr hab. inż. Zenon Gniazdowski Cel pracy Zbudowanie modelu predykcyjnego przyszłych wartości glikemii diabetyka leczonego za pomocą
SYSTEMY UCZĄCE SIĘ WYKŁAD 10. PRZEKSZTAŁCANIE ATRYBUTÓW. Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska.
 SYSTEMY UCZĄCE SIĘ WYKŁAD 10. PRZEKSZTAŁCANIE ATRYBUTÓW Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska INFORMACJE WSTĘPNE Hipotezy do uczenia się lub tworzenia
SYSTEMY UCZĄCE SIĘ WYKŁAD 10. PRZEKSZTAŁCANIE ATRYBUTÓW Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska INFORMACJE WSTĘPNE Hipotezy do uczenia się lub tworzenia
Praca dyplomowa magisterska
 Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Modelowanie jako sposób opisu rzeczywistości. Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka
 Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
2.2.P.07: Komputerowe narzędzia inżynierii powierzchni
 2nd Workshop on Foresight of surface properties formation leading technologies of engineering materials and biomaterials in Białka Tatrzańska, Poland 29th-30th November 2009 2 Panel nt. Produkt oraz materiał
2nd Workshop on Foresight of surface properties formation leading technologies of engineering materials and biomaterials in Białka Tatrzańska, Poland 29th-30th November 2009 2 Panel nt. Produkt oraz materiał
Automatyczne tworzenie trójwymiarowego planu pomieszczenia z zastosowaniem metod stereowizyjnych
 Automatyczne tworzenie trójwymiarowego planu pomieszczenia z zastosowaniem metod stereowizyjnych autor: Robert Drab opiekun naukowy: dr inż. Paweł Rotter 1. Wstęp Zagadnienie generowania trójwymiarowego
Automatyczne tworzenie trójwymiarowego planu pomieszczenia z zastosowaniem metod stereowizyjnych autor: Robert Drab opiekun naukowy: dr inż. Paweł Rotter 1. Wstęp Zagadnienie generowania trójwymiarowego
1.7. Eksploracja danych: pogłębianie, przeszukiwanie i wyławianie
 Wykaz tabel Wykaz rysunków Przedmowa 1. Wprowadzenie 1.1. Wprowadzenie do eksploracji danych 1.2. Natura zbiorów danych 1.3. Rodzaje struktur: modele i wzorce 1.4. Zadania eksploracji danych 1.5. Komponenty
Wykaz tabel Wykaz rysunków Przedmowa 1. Wprowadzenie 1.1. Wprowadzenie do eksploracji danych 1.2. Natura zbiorów danych 1.3. Rodzaje struktur: modele i wzorce 1.4. Zadania eksploracji danych 1.5. Komponenty
Spis treści. Przedmowa... XI. Rozdział 1. Pomiar: jednostki miar... 1. Rozdział 2. Pomiar: liczby i obliczenia liczbowe... 16
 Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
Spis treści Przedmowa.......................... XI Rozdział 1. Pomiar: jednostki miar................. 1 1.1. Wielkości fizyczne i pozafizyczne.................. 1 1.2. Spójne układy miar. Układ SI i jego
Automatyczne rozpoznawanie mowy - wybrane zagadnienia / Ryszard Makowski. Wrocław, Spis treści
 Automatyczne rozpoznawanie mowy - wybrane zagadnienia / Ryszard Makowski. Wrocław, 2011 Spis treści Przedmowa 11 Rozdział 1. WPROWADZENIE 13 1.1. Czym jest automatyczne rozpoznawanie mowy 13 1.2. Poziomy
Automatyczne rozpoznawanie mowy - wybrane zagadnienia / Ryszard Makowski. Wrocław, 2011 Spis treści Przedmowa 11 Rozdział 1. WPROWADZENIE 13 1.1. Czym jest automatyczne rozpoznawanie mowy 13 1.2. Poziomy
Wykrywanie twarzy na zdjęciach przy pomocy kaskad
 Wykrywanie twarzy na zdjęciach przy pomocy kaskad Analiza i przetwarzanie obrazów Sebastian Lipnicki Informatyka Stosowana,WFIIS Spis treści 1. Wstęp... 3 2. Struktura i funkcjonalnośd... 4 3. Wyniki...
Wykrywanie twarzy na zdjęciach przy pomocy kaskad Analiza i przetwarzanie obrazów Sebastian Lipnicki Informatyka Stosowana,WFIIS Spis treści 1. Wstęp... 3 2. Struktura i funkcjonalnośd... 4 3. Wyniki...
MT 2 N _0 Rok: 1 Semestr: 1 Forma studiów:
 Mechatronika Studia drugiego stopnia Przedmiot: Diagnostyka maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT N 0 1 1-0_0 Rok: 1 Semestr: 1 Forma studiów: Studia niestacjonarne Rodzaj zajęć i liczba
Mechatronika Studia drugiego stopnia Przedmiot: Diagnostyka maszyn Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT N 0 1 1-0_0 Rok: 1 Semestr: 1 Forma studiów: Studia niestacjonarne Rodzaj zajęć i liczba
Relacja: III Seminarium Naukowe "Inżynierskie zastosowania technologii informatycznych"
 Relacja: III Seminarium Naukowe "Inżynierskie zastosowania technologii informatycznych" W dniu 18.04.2015 odbyło się III Seminarium Naukowe Inżynierskie zastosowania technologii informatycznych. Organizatorzy
Relacja: III Seminarium Naukowe "Inżynierskie zastosowania technologii informatycznych" W dniu 18.04.2015 odbyło się III Seminarium Naukowe Inżynierskie zastosowania technologii informatycznych. Organizatorzy
Diagnostyka, wiadomości podstawowe
 Podstawowe pojęcia: Diagnostyka, wiadomości podstawowe Diagnostyka z gr.: diagnostikós oznacza "umiejący rozpoznawać To nauka początkowo wiązana głównie z medycyną nauka o sposobach rozpoznawania chorób.
Podstawowe pojęcia: Diagnostyka, wiadomości podstawowe Diagnostyka z gr.: diagnostikós oznacza "umiejący rozpoznawać To nauka początkowo wiązana głównie z medycyną nauka o sposobach rozpoznawania chorób.
Analiza obrazów - sprawozdanie nr 2
 Analiza obrazów - sprawozdanie nr 2 Filtracja obrazów Filtracja obrazu polega na obliczeniu wartości każdego z punktów obrazu na podstawie punktów z jego otoczenia. Każdy sąsiedni piksel ma wagę, która
Analiza obrazów - sprawozdanie nr 2 Filtracja obrazów Filtracja obrazu polega na obliczeniu wartości każdego z punktów obrazu na podstawie punktów z jego otoczenia. Każdy sąsiedni piksel ma wagę, która
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 8 AiR III
 1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
Metrologia: organizacja eksperymentu pomiarowego
 Metrologia: organizacja eksperymentu pomiarowego (na podstawie: Żółtowski B. Podstawy diagnostyki maszyn, 1996) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Teoria eksperymentu: Teoria eksperymentu
Metrologia: organizacja eksperymentu pomiarowego (na podstawie: Żółtowski B. Podstawy diagnostyki maszyn, 1996) dr inż. Paweł Zalewski Akademia Morska w Szczecinie Teoria eksperymentu: Teoria eksperymentu
Filtracja obrazu operacje kontekstowe
 Filtracja obrazu operacje kontekstowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu Poprawa ostrości Usunięcie określonych wad obrazu Poprawa obrazu o złej jakości technicznej Rekonstrukcja
Filtracja obrazu operacje kontekstowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu Poprawa ostrości Usunięcie określonych wad obrazu Poprawa obrazu o złej jakości technicznej Rekonstrukcja
Katowice GPW 2013. Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową. Jan Studziński
 Katowice GPW 2013 Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową Jan Studziński 1 1. Wstęp Cel pracy Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Katowice GPW 2013 Zintegrowany system informatyczny do kompleksowego zarządzania siecią wodociągową Jan Studziński 1 1. Wstęp Cel pracy Usprawnienie zarządzania siecią wodociągową za pomocą nowoczesnych
Problematyka budowy skanera 3D doświadczenia własne
 Problematyka budowy skanera 3D doświadczenia własne dr inż. Ireneusz Wróbel ATH Bielsko-Biała, Evatronix S.A. iwrobel@ath.bielsko.pl mgr inż. Paweł Harężlak mgr inż. Michał Bogusz Evatronix S.A. Plan wykładu
Problematyka budowy skanera 3D doświadczenia własne dr inż. Ireneusz Wróbel ATH Bielsko-Biała, Evatronix S.A. iwrobel@ath.bielsko.pl mgr inż. Paweł Harężlak mgr inż. Michał Bogusz Evatronix S.A. Plan wykładu
Problem eliminacji nieprzystających elementów w zadaniu rozpoznania wzorca Marcin Luckner
 Problem eliminacji nieprzystających elementów w zadaniu rozpoznania wzorca Marcin Luckner Wydział Matematyki i Nauk Informacyjnych Politechnika Warszawska Elementy nieprzystające Definicja odrzucania Klasyfikacja
Problem eliminacji nieprzystających elementów w zadaniu rozpoznania wzorca Marcin Luckner Wydział Matematyki i Nauk Informacyjnych Politechnika Warszawska Elementy nieprzystające Definicja odrzucania Klasyfikacja
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
1 Moduł Neuronu Analogowego SM
 1 Moduł Neuronu Analogowego SM Moduł Neuronu Analogowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Analogowych podłączonych do Sterownika Magistrali. Dzięki temu
1 Moduł Neuronu Analogowego SM Moduł Neuronu Analogowego SM daje użytkownikowi Systemu Vision możliwość obsługi fizycznych urządzeń Neuronów Analogowych podłączonych do Sterownika Magistrali. Dzięki temu
Rozpoznawanie wzorców i twarzy
 Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Rozpoznawanie wzorców i twarzy w wykładzie wykorzystano materiały z następujących prac inżynierskich/magisterskich: Błaszkowski P.
Sterowania Automatyka - zastosowania, metody i narzędzia, perspektywy Rozpoznawanie wzorców i twarzy w wykładzie wykorzystano materiały z następujących prac inżynierskich/magisterskich: Błaszkowski P.
Klasyfikatory: k-nn oraz naiwny Bayesa. Agnieszka Nowak Brzezińska Wykład IV
 Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
Analiza danych. http://zajecia.jakubw.pl/ TEMATYKA PRZEDMIOTU
 Analiza danych Wstęp Jakub Wróblewski jakubw@pjwstk.edu.pl http://zajecia.jakubw.pl/ TEMATYKA PRZEDMIOTU Różne aspekty analizy danych Reprezentacja graficzna danych Metody statystyczne: estymacja parametrów
Analiza danych Wstęp Jakub Wróblewski jakubw@pjwstk.edu.pl http://zajecia.jakubw.pl/ TEMATYKA PRZEDMIOTU Różne aspekty analizy danych Reprezentacja graficzna danych Metody statystyczne: estymacja parametrów
Opinia o pracy doktorskiej pt. On active disturbance rejection in robotic motion control autorstwa mgr inż. Rafała Madońskiego
 Prof. dr hab. inż. Tadeusz Uhl Katedra Robotyki i Mechatroniki Akademia Górniczo Hutnicza Al. Mickiewicza 30 30-059 Kraków Kraków 09.06.2016 Opinia o pracy doktorskiej pt. On active disturbance rejection
Prof. dr hab. inż. Tadeusz Uhl Katedra Robotyki i Mechatroniki Akademia Górniczo Hutnicza Al. Mickiewicza 30 30-059 Kraków Kraków 09.06.2016 Opinia o pracy doktorskiej pt. On active disturbance rejection
Analiza obrazów. Segmentacja i indeksacja obiektów
 Analiza obrazów. Segmentacja i indeksacja obiektów Wykorzystane materiały: R. Tadeusiewicz, P. Korohoda, Komputerowa analiza i przetwarzanie obrazów, Wyd. FPT, Kraków, 1997 Analiza obrazu Analiza obrazu
Analiza obrazów. Segmentacja i indeksacja obiektów Wykorzystane materiały: R. Tadeusiewicz, P. Korohoda, Komputerowa analiza i przetwarzanie obrazów, Wyd. FPT, Kraków, 1997 Analiza obrazu Analiza obrazu
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
GRUNDFOS WATER UTILITY INTELIGENTNY SYSTEM DYSTRYBUCJI
 INTELIGENTNY SYSTEM DYSTRYBUCJI Rozwiązania Grundfos ograniczające straty wody i zużycie energii w sieciach wodociągowych. Andrzej Kiełbasa Gdzie jest duży potencjał do uzyskania oszczędności? Straty Oszczędności
INTELIGENTNY SYSTEM DYSTRYBUCJI Rozwiązania Grundfos ograniczające straty wody i zużycie energii w sieciach wodociągowych. Andrzej Kiełbasa Gdzie jest duży potencjał do uzyskania oszczędności? Straty Oszczędności
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Statystyka w pracy badawczej nauczyciela Wykład 4: Analiza współzależności. dr inż. Walery Susłow walery.suslow@ie.tu.koszalin.pl
 Statystyka w pracy badawczej nauczyciela Wykład 4: Analiza współzależności dr inż. Walery Susłow walery.suslow@ie.tu.koszalin.pl Statystyczna teoria korelacji i regresji (1) Jest to dział statystyki zajmujący
Statystyka w pracy badawczej nauczyciela Wykład 4: Analiza współzależności dr inż. Walery Susłow walery.suslow@ie.tu.koszalin.pl Statystyczna teoria korelacji i regresji (1) Jest to dział statystyki zajmujący
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Process Analytical Technology (PAT),
,") Analiza danych Data mining Sterowanie jakością Analityka przez Internet Process Analytical Technology (PAT), nowoczesne podejście do zapewniania jakości wg. FDA Michał Iwaniec StatSoft Polska StatSoft
Analiza danych Data mining Sterowanie jakością Analityka przez Internet Process Analytical Technology (PAT), nowoczesne podejście do zapewniania jakości wg. FDA Michał Iwaniec StatSoft Polska StatSoft
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
4.1. Wprowadzenie...70 4.2. Podstawowe definicje...71 4.3. Algorytm określania wartości parametrów w regresji logistycznej...74
 3 Wykaz najważniejszych skrótów...8 Przedmowa... 10 1. Podstawowe pojęcia data mining...11 1.1. Wprowadzenie...12 1.2. Podstawowe zadania eksploracji danych...13 1.3. Główne etapy eksploracji danych...15
3 Wykaz najważniejszych skrótów...8 Przedmowa... 10 1. Podstawowe pojęcia data mining...11 1.1. Wprowadzenie...12 1.2. Podstawowe zadania eksploracji danych...13 1.3. Główne etapy eksploracji danych...15
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Eksploracja Danych. wykład 4. Sebastian Zając. 10 maja 2017 WMP.SNŚ UKSW. Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja / 18
 Eksploracja Danych 10 maja / 18") Eksploracja Danych wykład 4 Sebastian Zając WMP.SNŚ UKSW 10 maja 2017 Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja 2017 1 / 18 Klasyfikacja danych Klasyfikacja Najczęściej stosowana (najstarsza)
Eksploracja Danych wykład 4 Sebastian Zając WMP.SNŚ UKSW 10 maja 2017 Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja 2017 1 / 18 Klasyfikacja danych Klasyfikacja Najczęściej stosowana (najstarsza)
Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia. Mgr inż.
 Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia Mgr inż. Dorota Smorawa Plan prezentacji 1. Wprowadzenie do zagadnienia 2. Opis urządzeń badawczych
Metody kodowania wybranych cech biometrycznych na przykładzie wzoru naczyń krwionośnych dłoni i przedramienia Mgr inż. Dorota Smorawa Plan prezentacji 1. Wprowadzenie do zagadnienia 2. Opis urządzeń badawczych
Pojazdy przeciążone zagrożeniem dla trwałości nawierzchni drogowych: metody przeciwdziałania
 Pojazdy przeciążone zagrożeniem dla trwałości nawierzchni drogowych: metody przeciwdziałania Prof. dr hab. inż. Leszek Rafalski Mgr inż. Michał Karkowski II WARMIŃSKO-MAZURSKIE FORUM DROGOWE LIDZBARK WARMIŃSKI
Pojazdy przeciążone zagrożeniem dla trwałości nawierzchni drogowych: metody przeciwdziałania Prof. dr hab. inż. Leszek Rafalski Mgr inż. Michał Karkowski II WARMIŃSKO-MAZURSKIE FORUM DROGOWE LIDZBARK WARMIŃSKI
W poszukiwaniu sensu w świecie widzialnym
 W poszukiwaniu sensu w świecie widzialnym Andrzej Śluzek Nanyang Technological University Singapore Uniwersytet Mikołaja Kopernika Toruń AGH, Kraków, 28 maja 2010 1 Podziękowania Przedstawione wyniki powstały
W poszukiwaniu sensu w świecie widzialnym Andrzej Śluzek Nanyang Technological University Singapore Uniwersytet Mikołaja Kopernika Toruń AGH, Kraków, 28 maja 2010 1 Podziękowania Przedstawione wyniki powstały
Zastosowanie sztucznych sieci neuronowych w prognozowaniu szeregów czasowych (prezentacja 2)
") Zastosowanie sztucznych sieci neuronowych w prognozowaniu szeregów czasowych (prezentacja 2) Ewa Wołoszko Praca pisana pod kierunkiem Pani dr hab. Małgorzaty Doman Plan tego wystąpienia Teoria Narzędzia
Zastosowanie sztucznych sieci neuronowych w prognozowaniu szeregów czasowych (prezentacja 2) Ewa Wołoszko Praca pisana pod kierunkiem Pani dr hab. Małgorzaty Doman Plan tego wystąpienia Teoria Narzędzia
Serwis rozdzielnic niskich napięć MService Klucz do optymalnej wydajności instalacji
 Serwis rozdzielnic niskich napięć MService Klucz do optymalnej wydajności instalacji Tajemnica sukcesu firmy leży w zapewnieniu prawidłowego stanu technicznego instalacji podlegającej nadzorowi. Z danych
Serwis rozdzielnic niskich napięć MService Klucz do optymalnej wydajności instalacji Tajemnica sukcesu firmy leży w zapewnieniu prawidłowego stanu technicznego instalacji podlegającej nadzorowi. Z danych
Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
Agnieszka Nowak Brzezińska Wykład III
 Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Jacek Skorupski pok. 251 tel konsultacje: poniedziałek , sobota zjazdowa
 Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
Jacek Skorupski pok. 251 tel. 234-7339 jsk@wt.pw.edu.pl http://skorupski.waw.pl/mmt prezentacje ogłoszenia konsultacje: poniedziałek 16 15-18, sobota zjazdowa 9 40-10 25 Udział w zajęciach Kontrola wyników
S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE
 KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Systemy uczące się wykład 2
 Systemy uczące się wykład 2 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 19 X 2018 Podstawowe definicje Fakt; Przesłanka; Konkluzja; Reguła; Wnioskowanie. Typy wnioskowania
Systemy uczące się wykład 2 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 19 X 2018 Podstawowe definicje Fakt; Przesłanka; Konkluzja; Reguła; Wnioskowanie. Typy wnioskowania
Kompresja dźwięku w standardzie MPEG-1
 mgr inż. Grzegorz Kraszewski SYSTEMY MULTIMEDIALNE wykład 7, strona 1. Kompresja dźwięku w standardzie MPEG-1 Ogólne założenia kompresji stratnej Zjawisko maskowania psychoakustycznego Schemat blokowy
mgr inż. Grzegorz Kraszewski SYSTEMY MULTIMEDIALNE wykład 7, strona 1. Kompresja dźwięku w standardzie MPEG-1 Ogólne założenia kompresji stratnej Zjawisko maskowania psychoakustycznego Schemat blokowy
Mikroekonometria 5. Mikołaj Czajkowski Wiktor Budziński
 Mikroekonometria 5 Mikołaj Czajkowski Wiktor Budziński Zadanie 1. Wykorzystując dane me.medexp3.dta przygotuj model regresji kwantylowej 1. Przygotuj model regresji kwantylowej w którym logarytm wydatków
Mikroekonometria 5 Mikołaj Czajkowski Wiktor Budziński Zadanie 1. Wykorzystując dane me.medexp3.dta przygotuj model regresji kwantylowej 1. Przygotuj model regresji kwantylowej w którym logarytm wydatków
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Oferta badawcza Politechniki Gdańskiej dla przedsiębiorstw
 KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
KATEDRA AUTOMATYKI kierownik katedry: dr hab. inż. Kazimierz Kosmowski, prof. nadzw. PG tel.: 058 347-24-39 e-mail: kazkos@ely.pg.gda.pl adres www: http://www.ely.pg.gda.pl/kaut/ Systemy sterowania w obiektach
AUTOMATYKA INFORMATYKA
 AUTOMATYKA INFORMATYKA Technologie Informacyjne Sieć Semantyczna Przetwarzanie Języka Naturalnego Internet Edytor Serii: Zdzisław Kowalczuk Inteligentne wydobywanie informacji z internetowych serwisów
AUTOMATYKA INFORMATYKA Technologie Informacyjne Sieć Semantyczna Przetwarzanie Języka Naturalnego Internet Edytor Serii: Zdzisław Kowalczuk Inteligentne wydobywanie informacji z internetowych serwisów
KONCEPCJA NEURONOWEGO DETEKTORA USZKODZEŃ CZUJNIKA PRĘDKOŚCI DLA UKŁADÓW NAPĘDOWYCH Z SILNIKIEM INDUKCYJNYM STEROWANYCH METODĄ POLOWO ZORIENTOWANĄ
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 83 Electrical Engineering 2015 Kamil KLIMKOWSKI* Mateusz DYBKOWSKI* KONCEPCJA NEURONOWEGO DETEKTORA USZKODZEŃ CZUJNIKA PRĘDKOŚCI DLA UKŁADÓW NAPĘDOWYCH
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 83 Electrical Engineering 2015 Kamil KLIMKOWSKI* Mateusz DYBKOWSKI* KONCEPCJA NEURONOWEGO DETEKTORA USZKODZEŃ CZUJNIKA PRĘDKOŚCI DLA UKŁADÓW NAPĘDOWYCH
Sztuczna inteligencja stan wiedzy, perspektywy rozwoju i problemy etyczne. Piotr Bilski Instytut Radioelektroniki i Technik Multimedialnych
 Sztuczna inteligencja stan wiedzy, perspektywy rozwoju i problemy etyczne Piotr Bilski Instytut Radioelektroniki i Technik Multimedialnych Plan wystąpienia Co to jest sztuczna inteligencja? Pojęcie słabej
Sztuczna inteligencja stan wiedzy, perspektywy rozwoju i problemy etyczne Piotr Bilski Instytut Radioelektroniki i Technik Multimedialnych Plan wystąpienia Co to jest sztuczna inteligencja? Pojęcie słabej