Metody Programowania
|
|
|
- Kacper Mróz
- 8 lat temu
- Przeglądów:
Transkrypt
1 POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Metody Programowania Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl

2 Wykład 8: Wyszukiwanie lokalne. Tabu search. 1. Wprowadzenie. Koncepcja wyszukiwania lokalnego. 2. Przykład: problem spełnialności (SAT). 3. Wyszukiwanie lokalne w optymalizacji. 4. Przykłady: pokrycie wierzchołkowe grafu (VCP), minimalne drzewo rozpinające (MST), problem komiwojażera (TSP). 5. Przykładowe operacje i definicje sąsiedztwa. 6. Ulepszenia i modyfikacje wyszukiwania lokalnego. 7. Algorytm wyszukiwania z listą tabu (TS). 8. Przykład : problem MST z ograniczeniami. 9. Podsumowanie. Zalety i wady wyszukiwania lokalnego.

3 Wprowadzenie Metoda wyszukiwania lokalnego (ang. local search) jest jedną z najbardziej intuicyjnych technik projektowania algorytmów. Polega ona na niewielkich modyfikacjach rozwiązania początkowego (np. losowego), ocenie wszystkich uzyskanych w ten sposób rozwiązań pochodnych i wyborze najlepszego z nich jako nowego rozwiązania początkowego. Postępowanie jest kontynuowane do momentu, aż dalsza poprawa nie będzie już możliwa albo wyczerpał się czas przeznaczony na poszukiwanie rozwiązania. Przykładowe zastosowanie: decyzyjny problem spełnialności formuł boolowskich (SAT, z ang. satisfiability).

4 Problem spełnialności (SAT)

5 Algorytmy dla problemu SAT GSAT (Greedy SAT) i WalkSAT są algorytmami wyszukiwania lokalnego dla problemu spełnialności formuł boolowskich. Oba algorytmy mają zastosowanie do formuł boolowskich w postaci konjunkcyjnej normalnej. Punktem wyjścia jest losowe przyporządkowanie wszystkim zmiennym wartości logicznych 0 i 1. Algorytm kończy pracę, jeśli przyporządkowanie zapewnia wszystkim implicentom wartości 1. W przeciwnym wypadku jedna ze zmiennych może zmienić swoją wartość na przeciwną. Postępowanie jest kontyuowane aż do pozytywnego rezultatu. WalkSAT i GSAT różnią się metodami wyboru zmiennej do zanegowania. GSAT wybiera tę zmienną, której negacja minimalizuje liczbę implicentów o wartości 0. WalkSAT wybiera losowo implicent o wartości 0 przy aktualnym przyporządkowaniu a następnie neguje w tym implicencie losową zmienną, zmianiając wartość tego implicentu na 1. GSAT i WalkSAT kontynuują swoje postępowanie aż cała formuła przyjmie wartość 1. W przypadku braku postępu w zadanym czasie algorytmy mogą wystartować ponownie z nowym losowym przyporządkowaniem. W ten sposób mogą opuścić osiągniete minima lokalne (w SAT chodzi o optimum globalne!).

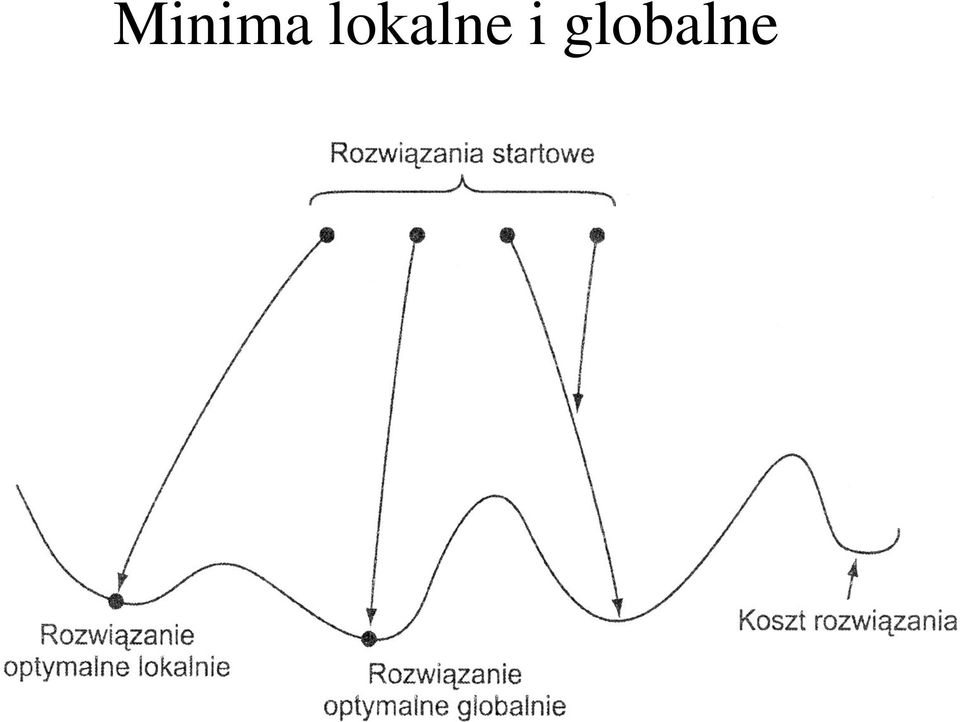
6 Wyszukiwanie lokalne w optymalizacji Wyszukiwanie lokalne jest bardzo popularną techniką stosowaną rozwiązywaniu problemów optymalizacyjnych. Przestrzeń rozwiązań problemu jest przeszukiwana iteracyjnie. W każdym kroku przechodzimy od najlepszego znalezionego dotąd rozwiązania do kolejnego tymczasowego optimum, wyznaczonego w jego sąsiedztwie. Otoczenie (sąsiedztwo) bieżącego rozwiązania musi być odpowiednio zdefiniowane. Algorytm wyszukiwania lokalnego nie gwarantuje osiągnięcia optimum globalnego, najczęściej uzyskane rozwiazanie jest optymalne lokalnie. Zastosowania do problemów optymalizacyjnych: pokrycie wierzchołkowe grafu (VCP), minimalne drzewo rozpinające (MST), problem komiwojażera (TSP).
 bieżącego rozwiązania musi być odpowiednio zdefiniowane.")
7 Minima lokalne i globalne
8 Problem minimalnego drzewa rozpinającego (MST) - wyszukiwanie lokalne Usuwana jest jedna losowa krawędź drzewa i dodawana jest losowa krawędź zapewniająca spójność grafu. W wszystkich rozwiązań sąsiednich wybierane jest rozwiązania najlepsze.

9 Problem komiwojażera operacja 2-opt Z trasy początkowej usuwamy 2 krawędzie : ab oraz cd. Trasy sąsiednie powstają przez dodanie dwóch nowych krawędzi, łączących powstałe odcinki ac oraz bd, tak aby nadal były ze sobą połaczone wszystkie miasta. Są to np. krawędzie ad i bc.

10 Problem komiwojażera (TSP) - wyszukiwanie lokalne za pomocą operacji 2-opt Trasa początkowa ma długość 25. W pierwszym kroku operacja 2-opt zamienia parę krawędzi ae i cd krawędziami ad i ce. Nowa trasa ma długość 23. W drugim kroku operacja 2-opt zamienia parę krawędzi ab i ce krawędziami ac i be. Otrzymana trasa ma długość 19.

11 Problem komiwojażera (TSP) - operacja 3-opt Z trasy początkowej usuwamy 3 krawędzie : ab, cd oraz ef. Trasy sąsiednie powstają przez dodanie trzech nowych krawędzi, łączących powstałe odcinki af, de oraz bc, tak aby nadal były ze sobą połaczone wszystkie miasta. Są to np. krawędzie ad, be i cf lub ad, bf i ce.

12 Problem komiwojażera (TSP) - wyszukiwanie lokalne za pomocą operacji 3-opt

13 Problem komiwojażera (TSP) - operacja 1-shift Z trasy początkowej usuwamy losową krawędź 78, oraz dwie krawędzie sąsiadujące z losowym wierzchołkiem 3 : 23 i 34. Trasa sąsiednia powstaje przez dodanie trzech nowych krawędzi: dwóch krawędzi łączących końce usuniętej krawędzi z wierzchołkiem 3 : 37 i 38 oraz krawędź 24, która jest bypassem omijającym wierzchołek 3.

14 Wyszukiwanie z listą tabu (Tabu Search) jako uogólnienie wyszukiwania lokalnego

15 Wyszukiwanie z listą tabu (Tabu Search) - schemat blokowy

16 Wyszukiwanie z listą tabu (Tabu Search) algorytm

17 Wyszukiwanie z listą tabu (Tabu Search) zastosowanie do problemu MST z ograniczeniami

18 Wyszukiwanie z listą tabu (Tabu Search) zastosowanie do problemu MST z ograniczeniami

19 Wyszukiwanie z listą tabu (Tabu Search) zastosowanie do problemu MST z ograniczeniami

20 Wyszukiwanie z listą tabu (Tabu Search) zastosowanie do problemu MST z ograniczeniami

21 Podsumowanie 1. Algorytm wyszukiwania lokalnego jest szczególnie cenny w optymalizacji kombinatorycznej. 2. Algorytm wyszukiwania lokalnego znajduje zwykle jedynie rozwiązanie przybliżone danego problemu. 3. Wyszukiwanie lokalne jest użyteczną techniką, która może być dalej ulepszana (np. algorytm wyszukiwania z listę tabu), albo stosowana jako uzupełniająca w bardziej zaawansowanych algorytmach łączących kilka różnych technik (w tzw. algorytmach hybrydowych).
22 Źródła przykładów i rysunków : 1. Aho A.V., Hopcroft J.E., Ullman J.D. : Algorytmy i struktury danych, Helion/Addison-Wesley Sait S.M., Youssef H. : Iterative computer algorithms with applications in engineering, IEEE computer Society Press Strony tematyczne w sieci.
Algorytmy i struktury danych
 POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Algorytmy i struktury danych www.pk.edu.pl/~zk/aisd_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 5: Algorytmy
POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Algorytmy i struktury danych www.pk.edu.pl/~zk/aisd_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 5: Algorytmy
Tabu Search (Poszukiwanie z zakazami)
") Tabu Search (Poszukiwanie z zakazami) Heurystyka - technika znajdująca dobre rozwiązanie problemu (np. optymalizacji kombinatorycznej) przy rozsądnych (akceptowalnych z punktu widzenia celu) nakładach
Tabu Search (Poszukiwanie z zakazami) Heurystyka - technika znajdująca dobre rozwiązanie problemu (np. optymalizacji kombinatorycznej) przy rozsądnych (akceptowalnych z punktu widzenia celu) nakładach
Optymalizacja. Wybrane algorytmy
 dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje w roku akademickim 2012/2013. Projektowanie i analiza algorytmów
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Elektrycznej i Komputerowej obowiązuje w roku akademickim 01/013 Kierunek studiów: Elektrotechnika Forma studiów: Niestacjonarne
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Elektrycznej i Komputerowej obowiązuje w roku akademickim 01/013 Kierunek studiów: Elektrotechnika Forma studiów: Niestacjonarne
Metody Optymalizacji: Przeszukiwanie z listą tabu
 Metody Optymalizacji: Przeszukiwanie z listą tabu Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje: wtorek
Metody Optymalizacji: Przeszukiwanie z listą tabu Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje: wtorek
Projektowanie i Analiza Algorytmów
 POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI I TECHNIK INFORMACYJNYCH Projektowanie i Analiza Algorytmów www.pk.edu.pl/~zk/piaa_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład
POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI I TECHNIK INFORMACYJNYCH Projektowanie i Analiza Algorytmów www.pk.edu.pl/~zk/piaa_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład
Złożoność obliczeniowa klasycznych problemów grafowych
 Złożoność obliczeniowa klasycznych problemów grafowych Oznaczenia: G graf, V liczba wierzchołków, E liczba krawędzi 1. Spójność grafu Graf jest spójny jeżeli istnieje ścieżka łącząca każdą parę jego wierzchołków.
Złożoność obliczeniowa klasycznych problemów grafowych Oznaczenia: G graf, V liczba wierzchołków, E liczba krawędzi 1. Spójność grafu Graf jest spójny jeżeli istnieje ścieżka łącząca każdą parę jego wierzchołków.
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje w roku akademickim 2012/2013. Algorytmy i struktury danych
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Elektrycznej i Komputerowej obowiązuje w roku akademickim 2012/2013 Kierunek studiów: Elektrotechnika Forma studiów: Niestacjonarne
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Elektrycznej i Komputerowej obowiązuje w roku akademickim 2012/2013 Kierunek studiów: Elektrotechnika Forma studiów: Niestacjonarne
Techniki optymalizacji
 Techniki optymalizacji Dokładne algorytmy optymalizacji Maciej Hapke maciej.hapke at put.poznan.pl Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem minimalizacji
Techniki optymalizacji Dokładne algorytmy optymalizacji Maciej Hapke maciej.hapke at put.poznan.pl Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem minimalizacji
Techniki optymalizacji
 Techniki optymalizacji Wprowadzenie Maciej Hapke maciej.hapke at put.poznan.pl Literatura D.E. Goldberg Algorytmy genetyczne i zastosowania, WNT, 1995 Z. Michalewicz Algorytmy genetyczne + struktury danych
Techniki optymalizacji Wprowadzenie Maciej Hapke maciej.hapke at put.poznan.pl Literatura D.E. Goldberg Algorytmy genetyczne i zastosowania, WNT, 1995 Z. Michalewicz Algorytmy genetyczne + struktury danych
Teoria obliczeń i złożoność obliczeniowa
 Teoria obliczeń i złożoność obliczeniowa Kontakt: dr hab. inż. Adam Kasperski, prof. PWr. pokój 509 B4 adam.kasperski@pwr.wroc.pl materiały + informacje na stronie www. Zaliczenie: Egzamin Literatura Problemy
Teoria obliczeń i złożoność obliczeniowa Kontakt: dr hab. inż. Adam Kasperski, prof. PWr. pokój 509 B4 adam.kasperski@pwr.wroc.pl materiały + informacje na stronie www. Zaliczenie: Egzamin Literatura Problemy
Programowanie sieciowe. Tadeusz Trzaskalik
 Programowanie Tadeusz Trzaskalik 8.1. Wprowadzenie Słowa kluczowe Drzewo rozpinające Minimalne drzewo rozpinające Najkrótsza droga w sieci Wierzchołek początkowy Maksymalny przepływ w sieci Źródło Ujście
Programowanie Tadeusz Trzaskalik 8.1. Wprowadzenie Słowa kluczowe Drzewo rozpinające Minimalne drzewo rozpinające Najkrótsza droga w sieci Wierzchołek początkowy Maksymalny przepływ w sieci Źródło Ujście
Algorytmy metaheurystyczne podsumowanie
 dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Andrzej Jaszkiewicz Problem optymalizacji kombinatorycznej Problem optymalizacji kombinatorycznej jest problemem
Opracowanie prof. J. Domsta 1
 Opracowanie prof. J. Domsta 1 Algorytm FLEURY'ego: Twierdzenie 6.5 G-graf eulerowski. Wtedy cykl Eulera otrzymujemy nastepująco: a) Start w dowolnym wierzchołku b) Krawędzie w dowolnej kolejności po przebyciu
Opracowanie prof. J. Domsta 1 Algorytm FLEURY'ego: Twierdzenie 6.5 G-graf eulerowski. Wtedy cykl Eulera otrzymujemy nastepująco: a) Start w dowolnym wierzchołku b) Krawędzie w dowolnej kolejności po przebyciu
Algorytmy Grafowe. dr hab. Bożena Woźna-Szcześniak, prof. UJD. Wykład 5 i 6. Uniwersytet Humanistyczno-Przyrodniczy im. Jana Długosza w Częstochowie
 Algorytmy Grafowe dr hab. Bożena Woźna-Szcześniak, prof. UJD Uniwersytet Humanistyczno-Przyrodniczy im. Jana Długosza w Częstochowie b.wozna@ujd.edu.pl Wykład 5 i 6 B. Woźna-Szcześniak (UJD) Algorytmy
Algorytmy Grafowe dr hab. Bożena Woźna-Szcześniak, prof. UJD Uniwersytet Humanistyczno-Przyrodniczy im. Jana Długosza w Częstochowie b.wozna@ujd.edu.pl Wykład 5 i 6 B. Woźna-Szcześniak (UJD) Algorytmy
Metoda tabel semantycznych. Dedukcja drogi Watsonie, dedukcja... Definicja logicznej konsekwencji. Logika obliczeniowa.
 Plan Procedura decyzyjna Reguły α i β - algorytm Plan Procedura decyzyjna Reguły α i β - algorytm Logika obliczeniowa Instytut Informatyki 1 Procedura decyzyjna Logiczna konsekwencja Teoria aksjomatyzowalna
Plan Procedura decyzyjna Reguły α i β - algorytm Plan Procedura decyzyjna Reguły α i β - algorytm Logika obliczeniowa Instytut Informatyki 1 Procedura decyzyjna Logiczna konsekwencja Teoria aksjomatyzowalna
Algorytmy grafowe. Wykład 2 Przeszukiwanie grafów. Tomasz Tyksiński CDV
 Algorytmy grafowe Wykład 2 Przeszukiwanie grafów Tomasz Tyksiński CDV Rozkład materiału 1. Podstawowe pojęcia teorii grafów, reprezentacje komputerowe grafów 2. Przeszukiwanie grafów 3. Spójność grafu,
Algorytmy grafowe Wykład 2 Przeszukiwanie grafów Tomasz Tyksiński CDV Rozkład materiału 1. Podstawowe pojęcia teorii grafów, reprezentacje komputerowe grafów 2. Przeszukiwanie grafów 3. Spójność grafu,
Optymalizacja. Przeszukiwanie lokalne
 dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Maciej Hapke Idea sąsiedztwa Definicja sąsiedztwa x S zbiór N(x) S rozwiązań, które leżą blisko rozwiązania x
dr hab. inż. Instytut Informatyki Politechnika Poznańska www.cs.put.poznan.pl/mkomosinski, Maciej Hapke Idea sąsiedztwa Definicja sąsiedztwa x S zbiór N(x) S rozwiązań, które leżą blisko rozwiązania x
Algorytmy i Struktury Danych
 POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Algorytmy i Struktury Danych www.pk.edu.pl/~zk/aisd_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 9: Programowanie
POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Algorytmy i Struktury Danych www.pk.edu.pl/~zk/aisd_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 9: Programowanie
Projektowanie i analiza algorytmów
 POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Projektowanie i analiza algorytmów www.pk.edu.pl/~zk/piaa_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład
POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Projektowanie i analiza algorytmów www.pk.edu.pl/~zk/piaa_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład
Teoria grafów dla małolatów. Andrzej Przemysław Urbański Instytut Informatyki Politechnika Poznańska
 Teoria grafów dla małolatów Andrzej Przemysław Urbański Instytut Informatyki Politechnika Poznańska Wstęp Matematyka to wiele różnych dyscyplin Bowiem świat jest bardzo skomplikowany wymaga rozważenia
Teoria grafów dla małolatów Andrzej Przemysław Urbański Instytut Informatyki Politechnika Poznańska Wstęp Matematyka to wiele różnych dyscyplin Bowiem świat jest bardzo skomplikowany wymaga rozważenia
Algorytmika Problemów Trudnych
 Algorytmika Problemów Trudnych Wykład 9 Tomasz Krawczyk krawczyk@tcs.uj.edu.pl Kraków, semestr letni 2016/17 plan wykładu Algorytmy aproksymacyjne: Pojęcie algorytmu aproksymacyjnego i współczynnika aproksymowalności.
Algorytmika Problemów Trudnych Wykład 9 Tomasz Krawczyk krawczyk@tcs.uj.edu.pl Kraków, semestr letni 2016/17 plan wykładu Algorytmy aproksymacyjne: Pojęcie algorytmu aproksymacyjnego i współczynnika aproksymowalności.
Matematyka dyskretna
 Matematyka dyskretna Wykład 13: Teoria Grafów Gniewomir Sarbicki Literatura R.J. Wilson Wprowadzenie do teorii grafów Definicja: Grafem (skończonym, nieskierowanym) G nazywamy parę zbiorów (V (G), E(G)),
Matematyka dyskretna Wykład 13: Teoria Grafów Gniewomir Sarbicki Literatura R.J. Wilson Wprowadzenie do teorii grafów Definicja: Grafem (skończonym, nieskierowanym) G nazywamy parę zbiorów (V (G), E(G)),
Grupowanie Witold Andrzejewski, Politechnika Poznańska, Wydział Informatyki 201/633
 Grupowanie Grupowanie 7 6 5 4 y 3 2 1 0-3 -2-1 0 1 2 3 4 5-1 -2-3 -4 x Witold Andrzejewski, Politechnika Poznańska, Wydział Informatyki 201/633 Wprowadzenie Celem procesu grupowania jest podział zbioru
Grupowanie Grupowanie 7 6 5 4 y 3 2 1 0-3 -2-1 0 1 2 3 4 5-1 -2-3 -4 x Witold Andrzejewski, Politechnika Poznańska, Wydział Informatyki 201/633 Wprowadzenie Celem procesu grupowania jest podział zbioru
Zaawansowane programowanie
 Zaawansowane programowanie wykład 3: inne heurystyki prof. dr hab. inż. Marta Kasprzak Instytut Informatyki, Politechnika Poznańska Heurystyką nazywamy algorytm (metodę) zwracający rozwiązanie przybliżone.
Zaawansowane programowanie wykład 3: inne heurystyki prof. dr hab. inż. Marta Kasprzak Instytut Informatyki, Politechnika Poznańska Heurystyką nazywamy algorytm (metodę) zwracający rozwiązanie przybliżone.
Wyznaczanie optymalnej trasy problem komiwojażera
 Wyznaczanie optymalnej trasy problem komiwojażera Optymalizacja w podejmowaniu decyzji Opracowała: mgr inż. Natalia Malinowska Wrocław, dn. 28.03.2017 Wydział Elektroniki Politechnika Wrocławska Plan prezentacji
Wyznaczanie optymalnej trasy problem komiwojażera Optymalizacja w podejmowaniu decyzji Opracowała: mgr inż. Natalia Malinowska Wrocław, dn. 28.03.2017 Wydział Elektroniki Politechnika Wrocławska Plan prezentacji
10. Kolorowanie wierzchołków grafu
 p. 10. Kolorowanie wierzchołków grafu 10.1 Definicje i twierdzenia Przez k-kolorowanie wierzchołków grafu G rozumiemy przyporzadkowanie każdemu wierzchołkowi grafu G jednego z k kolorów 1, 2,...,k. p.
p. 10. Kolorowanie wierzchołków grafu 10.1 Definicje i twierdzenia Przez k-kolorowanie wierzchołków grafu G rozumiemy przyporzadkowanie każdemu wierzchołkowi grafu G jednego z k kolorów 1, 2,...,k. p.
Drzewa. Jeżeli graf G jest lasem, który ma n wierzchołków i k składowych, to G ma n k krawędzi. Własności drzew
 Drzewa Las - graf, który nie zawiera cykli Drzewo - las spójny Jeżeli graf G jest lasem, który ma n wierzchołków i k składowych, to G ma n k krawędzi. Własności drzew Niech T graf o n wierzchołkach będący
Drzewa Las - graf, który nie zawiera cykli Drzewo - las spójny Jeżeli graf G jest lasem, który ma n wierzchołków i k składowych, to G ma n k krawędzi. Własności drzew Niech T graf o n wierzchołkach będący
a) 7 b) 19 c) 21 d) 34
 7 b) 19 c) 21 d) 34") Zadanie 1. Pytania testowe dotyczące podstawowych własności grafów. Zadanie 2. Przy każdym z zadań może się pojawić polecenie krótkiej charakterystyki algorytmu. Zadanie 3. W zadanym grafie sprawdzenie
Zadanie 1. Pytania testowe dotyczące podstawowych własności grafów. Zadanie 2. Przy każdym z zadań może się pojawić polecenie krótkiej charakterystyki algorytmu. Zadanie 3. W zadanym grafie sprawdzenie
Algorytmiczna teoria grafów
 Przedmiot fakultatywny 20h wykładu + 20h ćwiczeń 21 lutego 2014 Zasady zaliczenia 1 ćwiczenia (ocena): kolokwium, zadania programistyczne (implementacje algorytmów), praca na ćwiczeniach. 2 Wykład (egzamin)
Przedmiot fakultatywny 20h wykładu + 20h ćwiczeń 21 lutego 2014 Zasady zaliczenia 1 ćwiczenia (ocena): kolokwium, zadania programistyczne (implementacje algorytmów), praca na ćwiczeniach. 2 Wykład (egzamin)
Przykład planowania sieci publicznego transportu zbiorowego
 TRANSPORT PUBLICZNY Przykład planowania sieci publicznego transportu zbiorowego Źródło: Bieńczak M., 2015 Politechnika Poznańska, Wydział Maszyn Roboczych i Transportu 1 METODYKA ZAŁOśENIA Dostarczanie
TRANSPORT PUBLICZNY Przykład planowania sieci publicznego transportu zbiorowego Źródło: Bieńczak M., 2015 Politechnika Poznańska, Wydział Maszyn Roboczych i Transportu 1 METODYKA ZAŁOśENIA Dostarczanie
Matematyczne Podstawy Informatyki
 Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 2013/2014 Twierdzenie 2.1 Niech G będzie grafem prostym
Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 2013/2014 Twierdzenie 2.1 Niech G będzie grafem prostym
Sortowanie topologiczne skierowanych grafów acyklicznych
 Sortowanie topologiczne skierowanych grafów acyklicznych Metody boolowskie w informatyce Robert Sulkowski http://robert.brainusers.net 23 stycznia 2010 1 Definicja 1 (Cykl skierowany). Niech C = (V, A)
Sortowanie topologiczne skierowanych grafów acyklicznych Metody boolowskie w informatyce Robert Sulkowski http://robert.brainusers.net 23 stycznia 2010 1 Definicja 1 (Cykl skierowany). Niech C = (V, A)
Metody Programowania
 POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Metody Programowania www.pk.edu.pl/~zk/mp_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 15: Klasyczne techniki
POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Metody Programowania www.pk.edu.pl/~zk/mp_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 15: Klasyczne techniki
Drzewa spinające MST dla grafów ważonych Maksymalne drzewo spinające Drzewo Steinera. Wykład 6. Drzewa cz. II
 Wykład 6. Drzewa cz. II 1 / 65 drzewa spinające Drzewa spinające Zliczanie drzew spinających Drzewo T nazywamy drzewem rozpinającym (spinającym) (lub dendrytem) spójnego grafu G, jeżeli jest podgrafem
Wykład 6. Drzewa cz. II 1 / 65 drzewa spinające Drzewa spinające Zliczanie drzew spinających Drzewo T nazywamy drzewem rozpinającym (spinającym) (lub dendrytem) spójnego grafu G, jeżeli jest podgrafem
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Podniesienie poziomu wiedzy studentów z zagadnień dotyczących analizy i syntezy algorytmów z uwzględnieniem efektywności
Nazwa przedmiotu: I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1. Podniesienie poziomu wiedzy studentów z zagadnień dotyczących analizy i syntezy algorytmów z uwzględnieniem efektywności
Minimalizacja form boolowskich
 Sławomir Kulesza Technika cyfrowa Minimalizacja form boolowskich Wykład dla studentów III roku Informatyki Wersja 1.0, 05/10/2010 Minimalizacja form boolowskich Minimalizacja proces przekształcania form
Sławomir Kulesza Technika cyfrowa Minimalizacja form boolowskich Wykład dla studentów III roku Informatyki Wersja 1.0, 05/10/2010 Minimalizacja form boolowskich Minimalizacja proces przekształcania form
Kombinatoryczne problemy optymalizacyjne to problemy wyboru najlepszego rozwiązania z pewnego zbioru rozwiązań
 Kombinatoryczne problemy optymalizacyjne to problemy wyboru najlepszego rozwiązania z pewnego zbioru rozwiązań dopuszczalnych. NP-optymalizacyjny problem Π składa się: zbioru instancji D Π rozpoznawalnego
Kombinatoryczne problemy optymalizacyjne to problemy wyboru najlepszego rozwiązania z pewnego zbioru rozwiązań dopuszczalnych. NP-optymalizacyjny problem Π składa się: zbioru instancji D Π rozpoznawalnego
SZTUCZNA INTELIGENCJA
 SZTUCZNA INTELIGENCJA WYKŁAD 13. PROBLEMY OPTYMALIZACYJNE Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska PROBLEMY OPTYMALIZACYJNE Optymalizacja poszukiwanie
SZTUCZNA INTELIGENCJA WYKŁAD 13. PROBLEMY OPTYMALIZACYJNE Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska PROBLEMY OPTYMALIZACYJNE Optymalizacja poszukiwanie
Wybrane podstawowe rodzaje algorytmów
 Wybrane podstawowe rodzaje algorytmów Tomasz Głowacki tglowacki@cs.put.poznan.pl Zajęcia finansowane z projektu "Rozwój i doskonalenie kształcenia na Politechnice Poznańskiej w zakresie technologii informatycznych
Wybrane podstawowe rodzaje algorytmów Tomasz Głowacki tglowacki@cs.put.poznan.pl Zajęcia finansowane z projektu "Rozwój i doskonalenie kształcenia na Politechnice Poznańskiej w zakresie technologii informatycznych
Algorytmy i Struktury Danych
 POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Algorytmy i Struktury Danych www.pk.edu.pl/~zk/aisd_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 12: Wstęp
POLITECHNIKA KRAKOWSKA - WIEiK KATEDRA AUTOMATYKI i TECHNIK INFORMACYJNYCH Algorytmy i Struktury Danych www.pk.edu.pl/~zk/aisd_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 12: Wstęp
Rozdział 8 PROGRAMOWANIE SIECIOWE
 Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 8 PROGRAMOWANIE SIECIOWE 8.2. Ćwiczenia komputerowe Ćwiczenie 8.1 Wykorzystując
Wprowadzenie do badań operacyjnych z komputerem Opisy programów, ćwiczenia komputerowe i zadania. T. Trzaskalik (red.) Rozdział 8 PROGRAMOWANIE SIECIOWE 8.2. Ćwiczenia komputerowe Ćwiczenie 8.1 Wykorzystując
Rachunek podziałów i elementy teorii grafów będą stosowane w procedurach redukcji argumentów i dekompozycji funkcji boolowskich.
 Pojęcia podstawowe c.d. Rachunek podziałów Elementy teorii grafów Klasy zgodności Rachunek podziałów i elementy teorii grafów będą stosowane w procedurach redukcji argumentów i dekompozycji funkcji boolowskich.
Pojęcia podstawowe c.d. Rachunek podziałów Elementy teorii grafów Klasy zgodności Rachunek podziałów i elementy teorii grafów będą stosowane w procedurach redukcji argumentów i dekompozycji funkcji boolowskich.
Algorytmy memetyczne (hybrydowe algorytmy ewolucyjne)
") Algorytmy memetyczne (hybrydowe algorytmy ewolucyjne) 1 2 Wstęp Termin zaproponowany przez Pablo Moscato (1989). Kombinacja algorytmu ewolucyjnego z algorytmem poszukiwań lokalnych, tak że algorytm poszukiwań
Algorytmy memetyczne (hybrydowe algorytmy ewolucyjne) 1 2 Wstęp Termin zaproponowany przez Pablo Moscato (1989). Kombinacja algorytmu ewolucyjnego z algorytmem poszukiwań lokalnych, tak że algorytm poszukiwań
Metoda Tablic Semantycznych
 Procedura Plan Reguły Algorytm Logika obliczeniowa Instytut Informatyki Plan Procedura Reguły 1 Procedura decyzyjna Logiczna równoważność formuł Logiczna konsekwencja Procedura decyzyjna 2 Reguły α, β,
Procedura Plan Reguły Algorytm Logika obliczeniowa Instytut Informatyki Plan Procedura Reguły 1 Procedura decyzyjna Logiczna równoważność formuł Logiczna konsekwencja Procedura decyzyjna 2 Reguły α, β,
Koszt literału (literal cost) jest określony liczbą wystąpień literału w wyrażeniu boolowskim realizowanym przez układ.
 jest określony liczbą wystąpień literału w wyrażeniu boolowskim realizowanym przez układ.") Elementy cyfrowe i układy logiczne Wykład Legenda Kryterium kosztu realizacji Minimalizacja i optymalizacja Optymalizacja układów dwupoziomowych Tablica (mapa) Karnaugh a Metoda Quine a-mccluskey a Złożoność
Elementy cyfrowe i układy logiczne Wykład Legenda Kryterium kosztu realizacji Minimalizacja i optymalizacja Optymalizacja układów dwupoziomowych Tablica (mapa) Karnaugh a Metoda Quine a-mccluskey a Złożoność
Metody przeszukiwania
 Metody przeszukiwania Co to jest przeszukiwanie Przeszukiwanie polega na odnajdywaniu rozwiązania w dyskretnej przestrzeni rozwiązao. Zwykle przeszukiwanie polega na znalezieniu określonego rozwiązania
Metody przeszukiwania Co to jest przeszukiwanie Przeszukiwanie polega na odnajdywaniu rozwiązania w dyskretnej przestrzeni rozwiązao. Zwykle przeszukiwanie polega na znalezieniu określonego rozwiązania
Kierunek: Informatyka. Przedmiot:
 Kierunek: Informatyka Przedmiot: ALGORYTMY I Z LOŻONOŚĆ Czas trwania: Przedmiot: Jezyk wyk ladowy: semestr III obowiazkowy polski Rodzaj zaj eć Wyk lad Laboratorium Prowadzacy Prof. dr hab. Wojciech Penczek
Kierunek: Informatyka Przedmiot: ALGORYTMY I Z LOŻONOŚĆ Czas trwania: Przedmiot: Jezyk wyk ladowy: semestr III obowiazkowy polski Rodzaj zaj eć Wyk lad Laboratorium Prowadzacy Prof. dr hab. Wojciech Penczek
Algorytm dyskretnego PSO z przeszukiwaniem lokalnym w problemie dynamicznej wersji TSP
 Algorytm dyskretnego PSO z przeszukiwaniem lokalnym w problemie dynamicznej wersji TSP Łukasz Strąk lukasz.strak@gmail.com Uniwersytet Śląski, Instytut Informatyki, Będzińska 39, 41-205 Sosnowiec 9 grudnia
Algorytm dyskretnego PSO z przeszukiwaniem lokalnym w problemie dynamicznej wersji TSP Łukasz Strąk lukasz.strak@gmail.com Uniwersytet Śląski, Instytut Informatyki, Będzińska 39, 41-205 Sosnowiec 9 grudnia
Problem kodowania w automatach
 roblem kodowania w automatach Kodowanie stanów to przypisanie kolejnym stanom automatu odpowiednich kodów binarnych. Minimalna liczba bitów b potrzebna do zakodowania automatu, w którym liczność zbioru
roblem kodowania w automatach Kodowanie stanów to przypisanie kolejnym stanom automatu odpowiednich kodów binarnych. Minimalna liczba bitów b potrzebna do zakodowania automatu, w którym liczność zbioru
Metody optymalizacji dyskretnej. Metody przybliżone
 Metody optymalizacji dyskretnej Metody przybliżone Metody optymalizacji dyskretnej Większość problemów optymalizacji dyskretnej pochodzących z praktyki (szeregowanie, harmonogramowanie, transport, plany
Metody optymalizacji dyskretnej Metody przybliżone Metody optymalizacji dyskretnej Większość problemów optymalizacji dyskretnej pochodzących z praktyki (szeregowanie, harmonogramowanie, transport, plany
Struktury danych i złożoność obliczeniowa Wykład 5. Prof. dr hab. inż. Jan Magott
 Struktury danych i złożoność obliczeniowa Wykład 5 Prof. dr hab. inż. Jan Magott DMT rozwiązuje problem decyzyjny π przy kodowaniu e w co najwyżej wielomianowym czasie, jeśli dla wszystkich łańcuchów wejściowych
Struktury danych i złożoność obliczeniowa Wykład 5 Prof. dr hab. inż. Jan Magott DMT rozwiązuje problem decyzyjny π przy kodowaniu e w co najwyżej wielomianowym czasie, jeśli dla wszystkich łańcuchów wejściowych
ALGORYTMY I STRUKTURY DANYCH
 ALGORYTMY I STRUKTURY DANYCH wykład 1 wprowadzenie, struktury sterujace, projektowanie algorytmów dr hab. inż. Andrzej Obuchowicz, prof. UZ Instytut Sterowania i Systemów Informatycznych UZ p. 425 A2 tel.
ALGORYTMY I STRUKTURY DANYCH wykład 1 wprowadzenie, struktury sterujace, projektowanie algorytmów dr hab. inż. Andrzej Obuchowicz, prof. UZ Instytut Sterowania i Systemów Informatycznych UZ p. 425 A2 tel.
Praktyczne metody weryfikacji. Wykład 9: Weryfikacja ograniczona.. p.1/40
 Praktyczne metody weryfikacji Wykład 9: Weryfikacja ograniczona. p.1/40 Symboliczna weryfikacja modelowa (SMC) model kodowanie boolowskie QBF implementacja OBDD weryfikacja modelowa = operacje na OBDDs.
Praktyczne metody weryfikacji Wykład 9: Weryfikacja ograniczona. p.1/40 Symboliczna weryfikacja modelowa (SMC) model kodowanie boolowskie QBF implementacja OBDD weryfikacja modelowa = operacje na OBDDs.
Elementy teorii grafów Elementy teorii grafów
 Spis tresci 1 Spis tresci 1 Często w zagadnieniach praktycznych rozważa się pewien zbiór obiektów wraz z zależnościami jakie łączą te obiekty. Dla przykładu można badać pewną grupę ludzi oraz strukturę
Spis tresci 1 Spis tresci 1 Często w zagadnieniach praktycznych rozważa się pewien zbiór obiektów wraz z zależnościami jakie łączą te obiekty. Dla przykładu można badać pewną grupę ludzi oraz strukturę
Wstęp do Sztucznej Inteligencji
 Wstęp do Sztucznej Inteligencji Rozwiązywanie problemów-i Joanna Kołodziej Politechnika Krakowska Wydział Fizyki, Matematyki i Informatyki Rozwiązywanie problemów Podstawowe fazy: Sformułowanie celu -
Wstęp do Sztucznej Inteligencji Rozwiązywanie problemów-i Joanna Kołodziej Politechnika Krakowska Wydział Fizyki, Matematyki i Informatyki Rozwiązywanie problemów Podstawowe fazy: Sformułowanie celu -
Zofia Kruczkiewicz, Algorytmu i struktury danych, Wykład 14, 1
 Wykład Algorytmy grafowe metoda zachłanna. Właściwości algorytmu zachłannego:. W przeciwieństwie do metody programowania dynamicznego nie występuje etap dzielenia na mniejsze realizacje z wykorzystaniem
Wykład Algorytmy grafowe metoda zachłanna. Właściwości algorytmu zachłannego:. W przeciwieństwie do metody programowania dynamicznego nie występuje etap dzielenia na mniejsze realizacje z wykorzystaniem
Matematyczne Podstawy Informatyki
 Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 03/0 Przeszukiwanie w głąb i wszerz I Przeszukiwanie metodą
Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 03/0 Przeszukiwanie w głąb i wszerz I Przeszukiwanie metodą
7. Teoria drzew - spinanie i przeszukiwanie
 7. Teoria drzew - spinanie i przeszukiwanie Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie zima 2016/2017 rzegorz Kosiorowski (Uniwersytet Ekonomiczny 7. wteoria Krakowie) drzew - spinanie i przeszukiwanie
7. Teoria drzew - spinanie i przeszukiwanie Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie zima 2016/2017 rzegorz Kosiorowski (Uniwersytet Ekonomiczny 7. wteoria Krakowie) drzew - spinanie i przeszukiwanie
KARTA MODUŁU KSZTAŁCENIA
 KARTA MODUŁU KSZTAŁCENIA I. Informacje ogólne 1 Nazwa modułu kształcenia Algorytmy i struktury danych 2 Nazwa jednostki prowadzącej moduł Instytut Informatyki, Zakład Informatyki Stosowanej 3 Kod modułu
KARTA MODUŁU KSZTAŁCENIA I. Informacje ogólne 1 Nazwa modułu kształcenia Algorytmy i struktury danych 2 Nazwa jednostki prowadzącej moduł Instytut Informatyki, Zakład Informatyki Stosowanej 3 Kod modułu
WYŻSZA SZKOŁA INFORMATYKI STOSOWANEJ I ZARZĄDZANIA
 DRZEWA i LASY Drzewem nazywamy graf spójny nie zawierający cykli elementarnych. Lasem nazywamy graf nie zawierający cykli elementarnych. Przykłady drzew i lasów takie krawędzie są wykluczone drzewo las
DRZEWA i LASY Drzewem nazywamy graf spójny nie zawierający cykli elementarnych. Lasem nazywamy graf nie zawierający cykli elementarnych. Przykłady drzew i lasów takie krawędzie są wykluczone drzewo las
Suma dwóch grafów. Zespolenie dwóch grafów
 Suma dwóch grafów G 1 = ((G 1 ), E(G 1 )) G 2 = ((G 2 ), E(G 2 )) (G 1 ) i (G 2 ) rozłączne Suma G 1 G 2 graf ze zbiorem wierzchołków (G 1 ) (G 2 ) i rodziną krawędzi E(G 1 ) E(G 2 ) G 1 G 2 G 1 G 2 Zespolenie
Suma dwóch grafów G 1 = ((G 1 ), E(G 1 )) G 2 = ((G 2 ), E(G 2 )) (G 1 ) i (G 2 ) rozłączne Suma G 1 G 2 graf ze zbiorem wierzchołków (G 1 ) (G 2 ) i rodziną krawędzi E(G 1 ) E(G 2 ) G 1 G 2 G 1 G 2 Zespolenie
Algorytmy aproksymacyjne i parametryzowane
 Algorytmy aproksymacyjne i parametryzowane Marek Cygan Uniwersytet Warszawski 18 października 2012 Marek Cygan Algorytmy aproksymacyjne i parametryzowane 1/22 Wstęp W algorytmice problemy dzielimy na obliczeniowo
Algorytmy aproksymacyjne i parametryzowane Marek Cygan Uniwersytet Warszawski 18 października 2012 Marek Cygan Algorytmy aproksymacyjne i parametryzowane 1/22 Wstęp W algorytmice problemy dzielimy na obliczeniowo
Technologie Informacyjne
 POLITECHNIKA KRAKOWSKA - WIEiK - KATEDRA AUTOMATYKI Technologie Informacyjne www.pk.edu.pl/~zk/ti_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 3: Wprowadzenie do algorytmów i ich
POLITECHNIKA KRAKOWSKA - WIEiK - KATEDRA AUTOMATYKI Technologie Informacyjne www.pk.edu.pl/~zk/ti_hp.html Wykładowca: dr inż. Zbigniew Kokosiński zk@pk.edu.pl Wykład 3: Wprowadzenie do algorytmów i ich
Wykład 8. Drzewo rozpinające (minimum spanning tree)
") Wykład 8 Drzewo rozpinające (minimum spanning tree) 1 Minimalne drzewo rozpinające - przegląd Definicja problemu Własności minimalnych drzew rozpinających Algorytm Kruskala Algorytm Prima Literatura Cormen,
Wykład 8 Drzewo rozpinające (minimum spanning tree) 1 Minimalne drzewo rozpinające - przegląd Definicja problemu Własności minimalnych drzew rozpinających Algorytm Kruskala Algorytm Prima Literatura Cormen,
Wykład 4. Droga i cykl Eulera i Hamiltona
 Wykład 4. i Hamiltona Wykład 4. i Hamiltona 1 / 35 Grafy Eulera Niech G będzie grafem spójnym. Definicja Jeżeli w grafie G istnieje zamknięta droga prosta zawierająca wszystkie krawędzie grafu, to taką
Wykład 4. i Hamiltona Wykład 4. i Hamiltona 1 / 35 Grafy Eulera Niech G będzie grafem spójnym. Definicja Jeżeli w grafie G istnieje zamknięta droga prosta zawierająca wszystkie krawędzie grafu, to taką
Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych
 inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
Problemy z ograniczeniami
 Problemy z ograniczeniami 1 2 Dlaczego zadania z ograniczeniami Wiele praktycznych problemów to problemy z ograniczeniami. Problemy trudne obliczeniowo (np-trudne) to prawie zawsze problemy z ograniczeniami.
Problemy z ograniczeniami 1 2 Dlaczego zadania z ograniczeniami Wiele praktycznych problemów to problemy z ograniczeniami. Problemy trudne obliczeniowo (np-trudne) to prawie zawsze problemy z ograniczeniami.
5c. Sieci i przepływy
 5c. Sieci i przepływy Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie zima 2016/2017 rzegorz Kosiorowski (Uniwersytet Ekonomiczny w Krakowie) 5c. Sieci i przepływy zima 2016/2017 1 / 40 1 Definicje
5c. Sieci i przepływy Grzegorz Kosiorowski Uniwersytet Ekonomiczny w Krakowie zima 2016/2017 rzegorz Kosiorowski (Uniwersytet Ekonomiczny w Krakowie) 5c. Sieci i przepływy zima 2016/2017 1 / 40 1 Definicje
Document: Exercise*02*-*manual /11/ :31---page1of8 INSTRUKCJA DO ĆWICZENIA NR 2
 Document: Exercise*02*-*manual ---2014/11/12 ---8:31---page1of8 PRZEDMIOT TEMAT KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 2 Wybrane zagadnienia z
Document: Exercise*02*-*manual ---2014/11/12 ---8:31---page1of8 PRZEDMIOT TEMAT KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 2 Wybrane zagadnienia z
dr inż. Małgorzata Langer Architektura komputerów
 Instrukcja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią,
Instrukcja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią,
EGZAMIN - Wersja A. ALGORYTMY I STRUKTURY DANYCH Lisek89 opracowanie kartki od Pani dr E. Koszelew
 1. ( pkt) Dany jest algorytm, który dla dowolnej liczby naturalnej n, powinien wyznaczyd sumę kolejnych liczb naturalnych mniejszych od n. Wynik algorytmu jest zapisany w zmiennej suma. Algorytm i=1; suma=0;
1. ( pkt) Dany jest algorytm, który dla dowolnej liczby naturalnej n, powinien wyznaczyd sumę kolejnych liczb naturalnych mniejszych od n. Wynik algorytmu jest zapisany w zmiennej suma. Algorytm i=1; suma=0;
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Programowanie liniowe metoda sympleks
 Programowanie liniowe metoda sympleks Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 13. wykład z algebry liniowej Warszawa, styczeń 2018 Mirosław Sobolewski (UW) Warszawa, 2018 1 /
Programowanie liniowe metoda sympleks Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW 13. wykład z algebry liniowej Warszawa, styczeń 2018 Mirosław Sobolewski (UW) Warszawa, 2018 1 /
Wstęp do programowania. Drzewa. Piotr Chrząstowski-Wachtel
 Wstęp do programowania Drzewa Piotr Chrząstowski-Wachtel Drzewa Drzewa definiują matematycy, jako spójne nieskierowane grafy bez cykli. Równoważne określenia: Spójne grafy o n wierzchołkach i n-1 krawędziach
Wstęp do programowania Drzewa Piotr Chrząstowski-Wachtel Drzewa Drzewa definiują matematycy, jako spójne nieskierowane grafy bez cykli. Równoważne określenia: Spójne grafy o n wierzchołkach i n-1 krawędziach
Adam Meissner SZTUCZNA INTELIGANCJA
 Instytut Automatyki i Inżynierii Informatycznej Politechniki Poznańskiej Adam Meissner Adam.Meissner@put.poznan.pl http://www.man.poznan.pl/~ameis SZTUCZNA INTELIGANCJA Podstawy programowania z ograniczeniami
Instytut Automatyki i Inżynierii Informatycznej Politechniki Poznańskiej Adam Meissner Adam.Meissner@put.poznan.pl http://www.man.poznan.pl/~ameis SZTUCZNA INTELIGANCJA Podstawy programowania z ograniczeniami
Algorytmy ewolucyjne (3)
") Algorytmy ewolucyjne (3) http://zajecia.jakubw.pl/nai KODOWANIE PERMUTACJI W pewnych zastosowaniach kodowanie binarne jest mniej naturalne, niż inne sposoby kodowania. Na przykład, w problemie komiwojażera
Algorytmy ewolucyjne (3) http://zajecia.jakubw.pl/nai KODOWANIE PERMUTACJI W pewnych zastosowaniach kodowanie binarne jest mniej naturalne, niż inne sposoby kodowania. Na przykład, w problemie komiwojażera
SPÓJNOŚĆ. ,...v k. }, E={v 1. v k. i v k. ,...,v k-1. }. Wierzchołki v 1. v 2. to końce ścieżki.
 SPÓJNOŚĆ Graf jest spójny, gdy dla każdego podziału V na dwa rozłączne podzbiory A i B istnieje krawędź z A do B. Definicja równoważna: Graf jest spójny, gdy każde dwa wierzchołki są połączone ścieżką
SPÓJNOŚĆ Graf jest spójny, gdy dla każdego podziału V na dwa rozłączne podzbiory A i B istnieje krawędź z A do B. Definicja równoważna: Graf jest spójny, gdy każde dwa wierzchołki są połączone ścieżką
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody bezgradientowe optymalizacji bez ograniczeń Materiały pomocnicze do ćwiczeń
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Metody optymalizacji Metody bezgradientowe optymalizacji bez ograniczeń Materiały pomocnicze do ćwiczeń
Plan wykładu. Przykład. Przykład 3/19/2011. Przykład zagadnienia transportowego. Optymalizacja w procesach biznesowych Wykład 2 DECYZJA?
 /9/ Zagadnienie transportowe Optymalizacja w procesach biznesowych Wykład --9 Plan wykładu Przykład zagadnienia transportowego Sformułowanie problemu Własności zagadnienia transportowego Metoda potencjałów
/9/ Zagadnienie transportowe Optymalizacja w procesach biznesowych Wykład --9 Plan wykładu Przykład zagadnienia transportowego Sformułowanie problemu Własności zagadnienia transportowego Metoda potencjałów
Programowanie celowe #1
 Programowanie celowe #1 Problem programowania celowego (PC) jest przykładem problemu programowania matematycznego nieliniowego, który można skutecznie zlinearyzować, tzn. zapisać (i rozwiązać) jako problem
Programowanie celowe #1 Problem programowania celowego (PC) jest przykładem problemu programowania matematycznego nieliniowego, który można skutecznie zlinearyzować, tzn. zapisać (i rozwiązać) jako problem
Reprezentacje grafów nieskierowanych Reprezentacje grafów skierowanych. Wykład 2. Reprezentacja komputerowa grafów
 Wykład 2. Reprezentacja komputerowa grafów 1 / 69 Macierz incydencji Niech graf G będzie grafem nieskierowanym bez pętli o n wierzchołkach (x 1, x 2,..., x n) i m krawędziach (e 1, e 2,..., e m). 2 / 69
Wykład 2. Reprezentacja komputerowa grafów 1 / 69 Macierz incydencji Niech graf G będzie grafem nieskierowanym bez pętli o n wierzchołkach (x 1, x 2,..., x n) i m krawędziach (e 1, e 2,..., e m). 2 / 69
BADANIA OPERACYJNE i teoria optymalizacji. Prowadzący: dr Tomasz Pisula Katedra Metod Ilościowych
 BADANIA OPERACYJNE i teoria optymalizacji Prowadzący: dr Tomasz Pisula Katedra Metod Ilościowych e-mail: tpisula@prz.edu.pl 1 Literatura podstawowa wykorzystywana podczas zajęć wykładowych: 1. Gajda J.,
BADANIA OPERACYJNE i teoria optymalizacji Prowadzący: dr Tomasz Pisula Katedra Metod Ilościowych e-mail: tpisula@prz.edu.pl 1 Literatura podstawowa wykorzystywana podczas zajęć wykładowych: 1. Gajda J.,
Agenda. Politechnika Poznańska WMRiT ZST. Piotr Sawicki Optymalizacja w transporcie 1. Kluczowe elementy wykładu. WPROWADZENIE Cel i zakres wykładu.
 Tytuł: 01 Budowa portfela produktowego. Zastosowanie programowania liniowego Autor: Piotr SAWICKI Zakład Systemów Transportowych WMRiT PP piotr.sawicki@put.poznan.pl www.put.poznan.pl/~piotr.sawicki www.facebook.com/piotr.sawicki.put
Tytuł: 01 Budowa portfela produktowego. Zastosowanie programowania liniowego Autor: Piotr SAWICKI Zakład Systemów Transportowych WMRiT PP piotr.sawicki@put.poznan.pl www.put.poznan.pl/~piotr.sawicki www.facebook.com/piotr.sawicki.put
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA I WSPOMAGANIA DECYZJI Rozproszone programowanie produkcji z wykorzystaniem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA I WSPOMAGANIA DECYZJI Rozproszone programowanie produkcji z wykorzystaniem
Programowanie liniowe metoda sympleks
 Programowanie liniowe metoda sympleks Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW wykład z algebry liniowej Warszawa, styczeń 2009 Mirosław Sobolewski (UW) Warszawa, 2009 1 / 13
Programowanie liniowe metoda sympleks Mirosław Sobolewski Wydział Matematyki, Informatyki i Mechaniki UW wykład z algebry liniowej Warszawa, styczeń 2009 Mirosław Sobolewski (UW) Warszawa, 2009 1 / 13
Matematyczne Podstawy Informatyki
 Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 2013/2014 Informacje podstawowe 1. Konsultacje: pokój
Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 2013/2014 Informacje podstawowe 1. Konsultacje: pokój
Tworzenie gier na urządzenia mobilne
 Katedra Inżynierii Wiedzy Wykład 11 O czym dzisiaj? labirynty, dużo labiryntów; automaty komórkowe; algorytmy do budowy labiryntów; algorytmy do szukania wyjścia z labiryntów; Blueprints i drzewa zachowań
Katedra Inżynierii Wiedzy Wykład 11 O czym dzisiaj? labirynty, dużo labiryntów; automaty komórkowe; algorytmy do budowy labiryntów; algorytmy do szukania wyjścia z labiryntów; Blueprints i drzewa zachowań
Schemat programowania dynamicznego (ang. dynamic programming)
") Schemat programowania dynamicznego (ang. dynamic programming) Jest jedną z metod rozwiązywania problemów optymalizacyjnych. Jej twórcą (1957) był amerykański matematyk Richard Ernest Bellman. Schemat ten
Schemat programowania dynamicznego (ang. dynamic programming) Jest jedną z metod rozwiązywania problemów optymalizacyjnych. Jej twórcą (1957) był amerykański matematyk Richard Ernest Bellman. Schemat ten
ZADANIA OTWARTE. Uwaga! Każde poprawne, inne niż przykładowe, rozwiązanie powinno być punktowane maksymalną liczbą punktów.
 WOJEWÓDZKIE KONKURSY PRZEDMIOTOWE 05/06 GIMNAZJUM Wojewódzki Konkurs Matematyczny SCHEMAT PUNKTOWANIA ZADANIA ZAMKNIĘTE Za każdą poprawną odpowiedź uczeń otrzymuje punkt. Zad. 5 6 7 9 0 5 6 7 Odp. A B
WOJEWÓDZKIE KONKURSY PRZEDMIOTOWE 05/06 GIMNAZJUM Wojewódzki Konkurs Matematyczny SCHEMAT PUNKTOWANIA ZADANIA ZAMKNIĘTE Za każdą poprawną odpowiedź uczeń otrzymuje punkt. Zad. 5 6 7 9 0 5 6 7 Odp. A B
Sortowanie Shella Shell Sort
 Sortowanie Shella Shell Sort W latach 50-tych ubiegłego wieku informatyk Donald Shell zauważył, iż algorytm sortowania przez wstawianie pracuje bardzo efektywnie w przypadku gdy zbiór jest w dużym stopniu
Sortowanie Shella Shell Sort W latach 50-tych ubiegłego wieku informatyk Donald Shell zauważył, iż algorytm sortowania przez wstawianie pracuje bardzo efektywnie w przypadku gdy zbiór jest w dużym stopniu
Graf. Definicja marca / 1
 Graf 25 marca 2018 Graf Definicja 1 Graf ogólny to para G = (V, E), gdzie V jest zbiorem wierzchołków (węzłów, punktów grafu), E jest rodziną krawędzi, które mogą być wielokrotne, dokładniej jednoelementowych
Graf 25 marca 2018 Graf Definicja 1 Graf ogólny to para G = (V, E), gdzie V jest zbiorem wierzchołków (węzłów, punktów grafu), E jest rodziną krawędzi, które mogą być wielokrotne, dokładniej jednoelementowych
Algorytmy równoległe. Rafał Walkowiak Politechnika Poznańska Studia inżynierskie Informatyka 2010
 Algorytmy równoległe Rafał Walkowiak Politechnika Poznańska Studia inżynierskie Informatyka Znajdowanie maksimum w zbiorze n liczb węzły - maksimum liczb głębokość = 3 praca = 4++ = 7 (operacji) n - liczność
Algorytmy równoległe Rafał Walkowiak Politechnika Poznańska Studia inżynierskie Informatyka Znajdowanie maksimum w zbiorze n liczb węzły - maksimum liczb głębokość = 3 praca = 4++ = 7 (operacji) n - liczność
WYŻSZA SZKOŁA INFORMATYKI STOSOWANEJ I ZARZĄDZANIA
 DROGI i CYKLE w grafach Dla grafu (nieskierowanego) G = ( V, E ) drogą z wierzchołka v 0 V do v t V nazywamy ciąg (naprzemienny) wierzchołków i krawędzi grafu: ( v 0, e, v, e,..., v t, e t, v t ), spełniający
DROGI i CYKLE w grafach Dla grafu (nieskierowanego) G = ( V, E ) drogą z wierzchołka v 0 V do v t V nazywamy ciąg (naprzemienny) wierzchołków i krawędzi grafu: ( v 0, e, v, e,..., v t, e t, v t ), spełniający
Programowanie obiektowe
 Programowanie obiektowe Sieci powiązań Paweł Daniluk Wydział Fizyki Jesień 2015 P. Daniluk (Wydział Fizyki) PO w. IX Jesień 2015 1 / 21 Sieci powiązań Można (bardzo zgrubnie) wyróżnić dwa rodzaje powiązań
Programowanie obiektowe Sieci powiązań Paweł Daniluk Wydział Fizyki Jesień 2015 P. Daniluk (Wydział Fizyki) PO w. IX Jesień 2015 1 / 21 Sieci powiązań Można (bardzo zgrubnie) wyróżnić dwa rodzaje powiązań
ZASADY PROGRAMOWANIA KOMPUTERÓW ZAP zima 2014/2015. Drzewa BST c.d., równoważenie drzew, kopce.
 POLITECHNIKA WARSZAWSKA Instytut Automatyki i Robotyki ZASADY PROGRAMOWANIA KOMPUTERÓW ZAP zima 204/205 Język programowania: Środowisko programistyczne: C/C++ Qt Wykład 2 : Drzewa BST c.d., równoważenie
POLITECHNIKA WARSZAWSKA Instytut Automatyki i Robotyki ZASADY PROGRAMOWANIA KOMPUTERÓW ZAP zima 204/205 Język programowania: Środowisko programistyczne: C/C++ Qt Wykład 2 : Drzewa BST c.d., równoważenie
Załącznik Nr 5 do Zarz. Nr 33/11/ Kod przedmiotu:aisd2
 Załącznik Nr 5 do Zarz. Nr 33/11/12 (pieczęć wydziału) KARTA PRZEDMIOTU Z1-PU7 WYDANIE N1 Strona 1 z 5 1. Nazwa przedmiotu: ALGORYTMY I STRUKTURY DANYCH 2 3. Karta przedmiotu ważna od roku akademickiego:
Załącznik Nr 5 do Zarz. Nr 33/11/12 (pieczęć wydziału) KARTA PRZEDMIOTU Z1-PU7 WYDANIE N1 Strona 1 z 5 1. Nazwa przedmiotu: ALGORYTMY I STRUKTURY DANYCH 2 3. Karta przedmiotu ważna od roku akademickiego:
E: Rekonstrukcja ewolucji. Algorytmy filogenetyczne
 E: Rekonstrukcja ewolucji. Algorytmy filogenetyczne Przypominajka: 152 drzewo filogenetyczne to drzewo, którego liśćmi są istniejące gatunki, a węzły wewnętrzne mają stopień większy niż jeden i reprezentują
E: Rekonstrukcja ewolucji. Algorytmy filogenetyczne Przypominajka: 152 drzewo filogenetyczne to drzewo, którego liśćmi są istniejące gatunki, a węzły wewnętrzne mają stopień większy niż jeden i reprezentują
Heurystyczne metody przeszukiwania
 Heurystyczne metody przeszukiwania Dariusz Banasiak Katedra Informatyki Technicznej W4/K9 Politechnika Wrocławska Pojęcie heurystyki Metody heurystyczne są jednym z ważniejszych narzędzi sztucznej inteligencji.
Heurystyczne metody przeszukiwania Dariusz Banasiak Katedra Informatyki Technicznej W4/K9 Politechnika Wrocławska Pojęcie heurystyki Metody heurystyczne są jednym z ważniejszych narzędzi sztucznej inteligencji.